
Enhancing Transient Response in a DC-DC Converter for Electric Vehicle DC Fast Charging Applications Using Fractional-Order PI Control



Abstract
:1. Introduction
1.1. Literature Review
1.2. Motivation and Challenges
1.3. Contributions
- This is a detailed study on FOPI using simulation with a classical PI controller to maintain DAB’s output voltage regardless of load fluctuations.
- A relative analysis of a fractional with classical PI controller to attain DAB’s output voltage regardless of line variations.
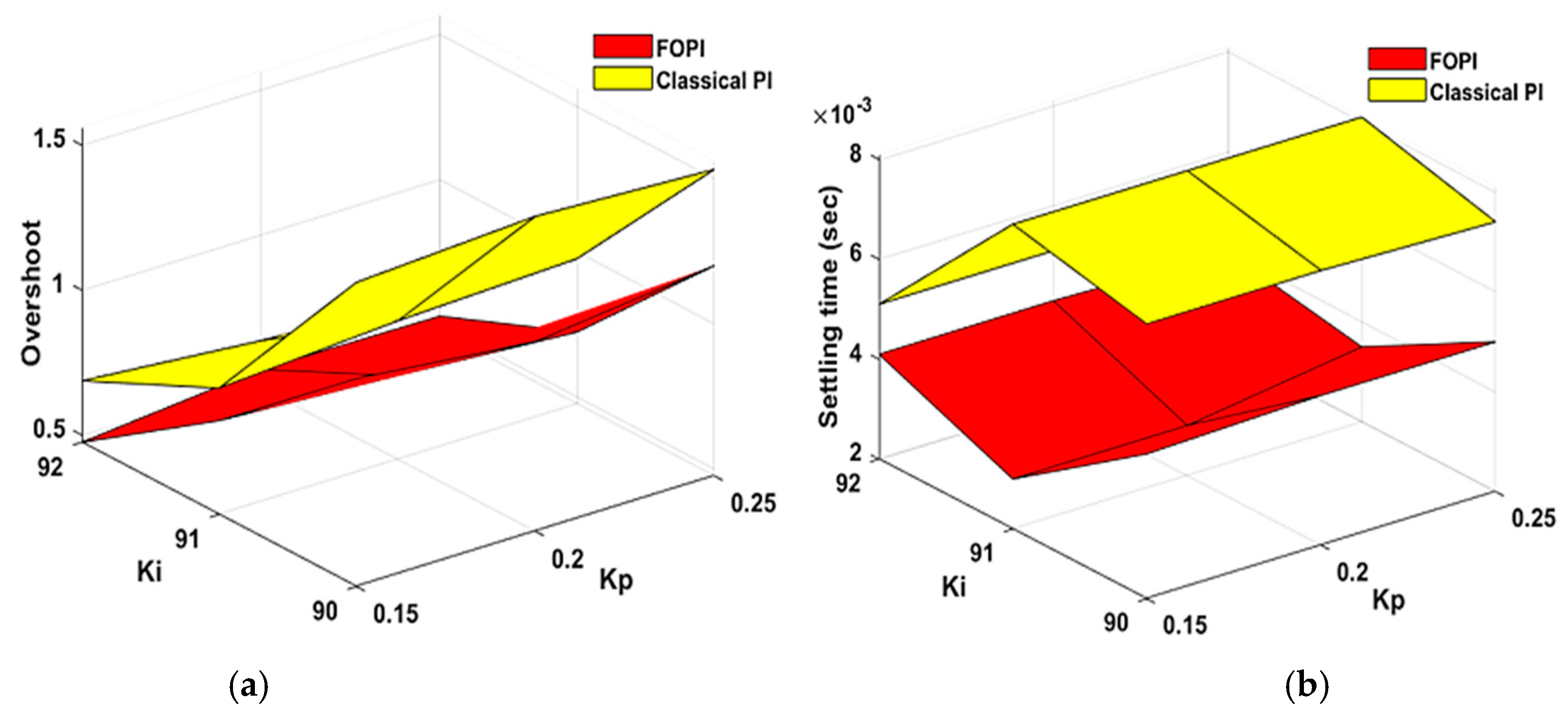
- An overshoot and settling time analysis with respect to variation in Kp, Ki, and λ values.
- A performance assessment of the proposed FOPI using the following indices: (a) Integral Square Error (ISE) (b) Integral Absolute Error (IAE), and (c) Integral Time Absolute Error (ITAE).
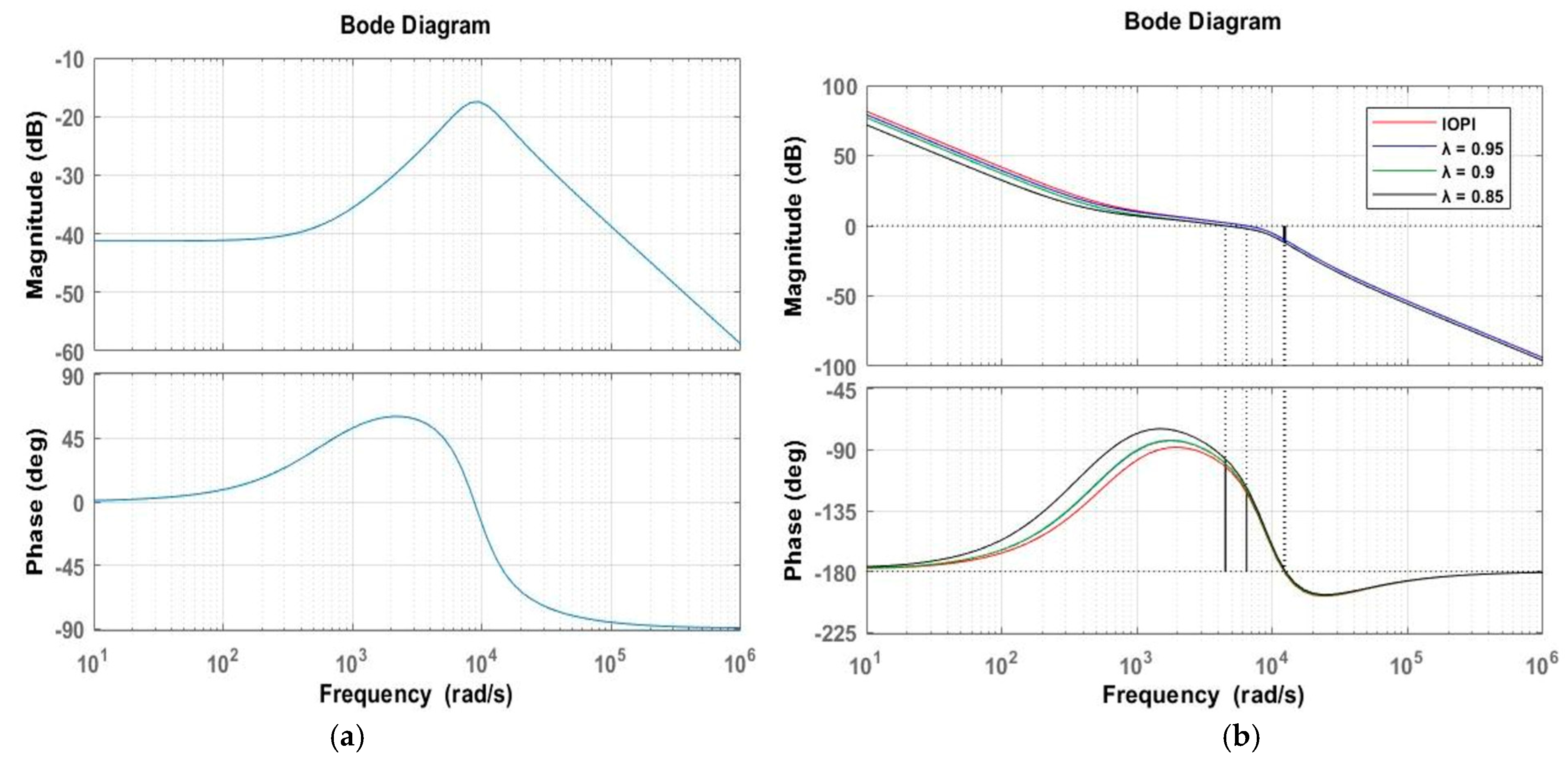
- A bode plot analysis.
1.4. Paper Structure
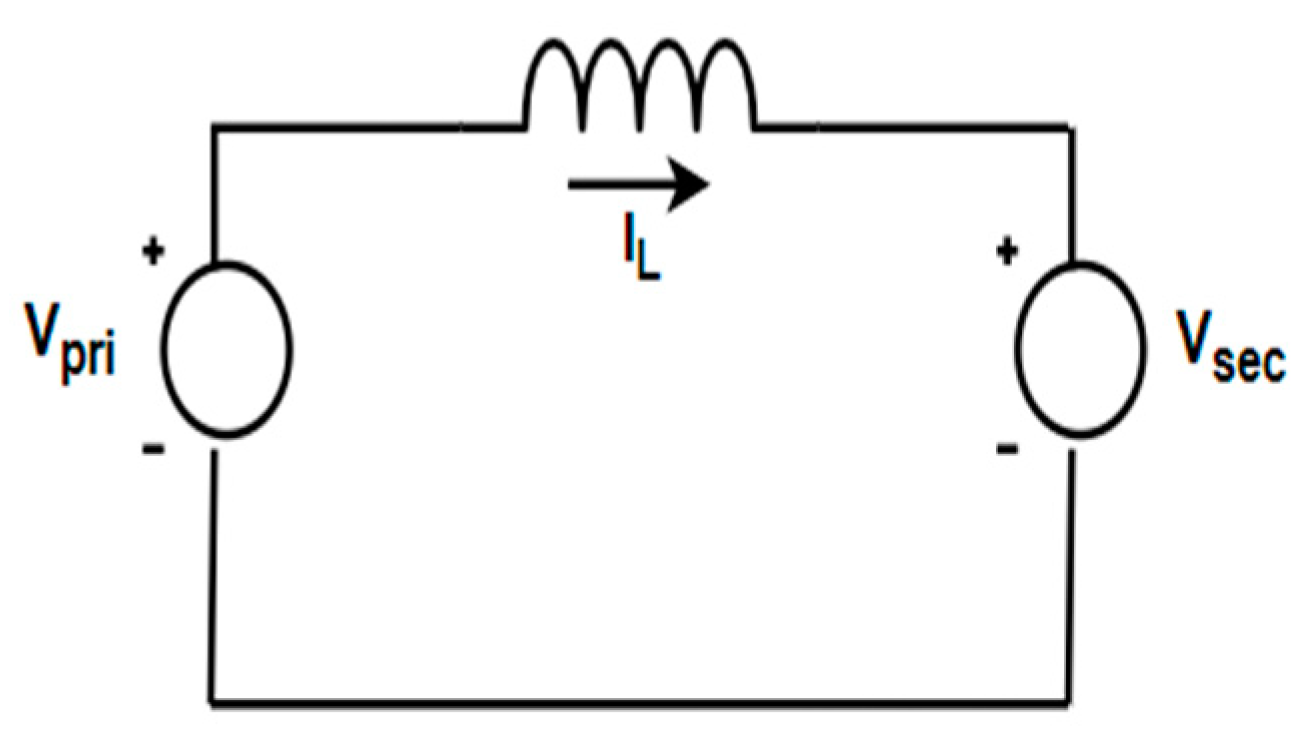
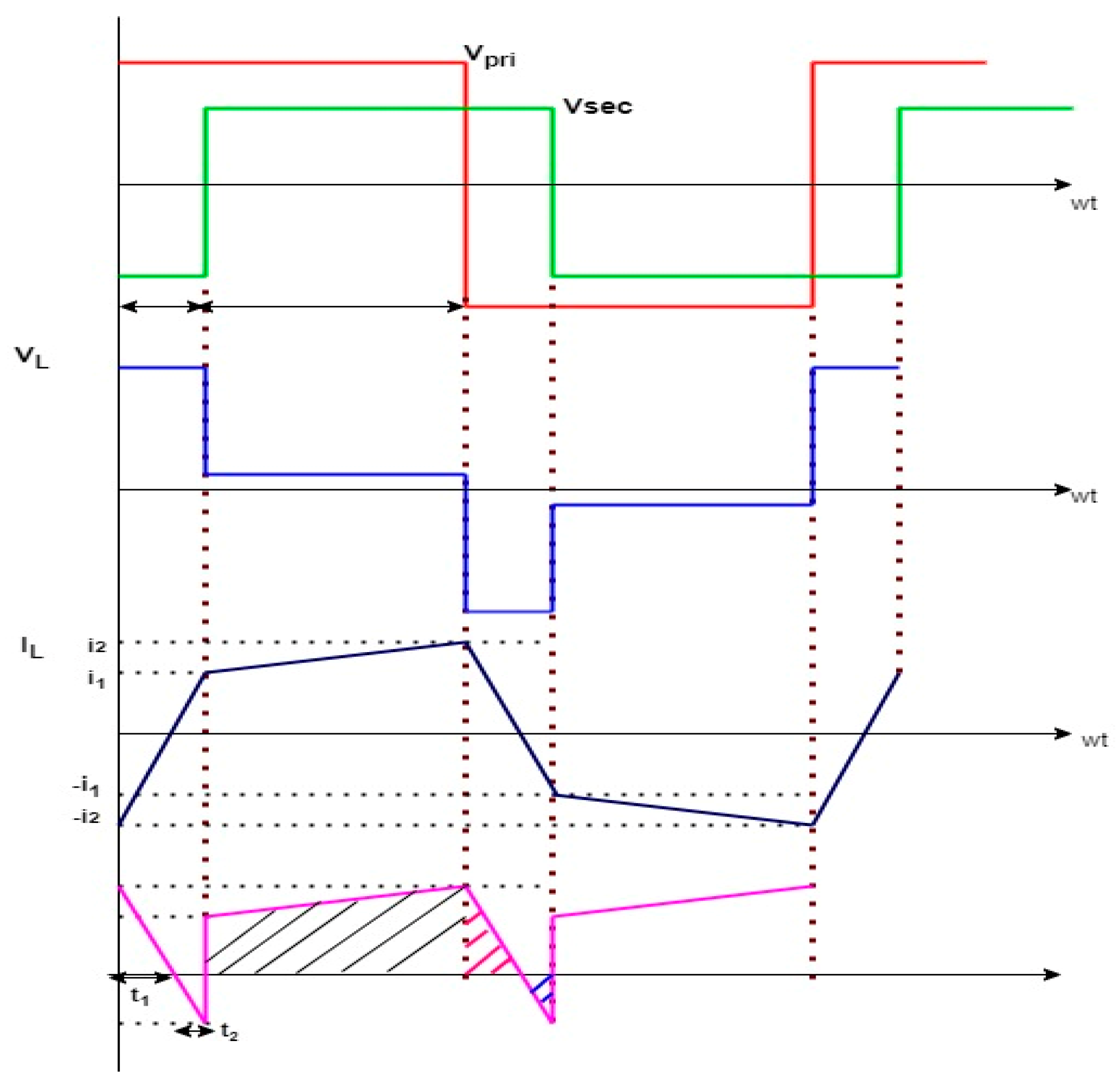
2. Mathematical Modelling of DAB
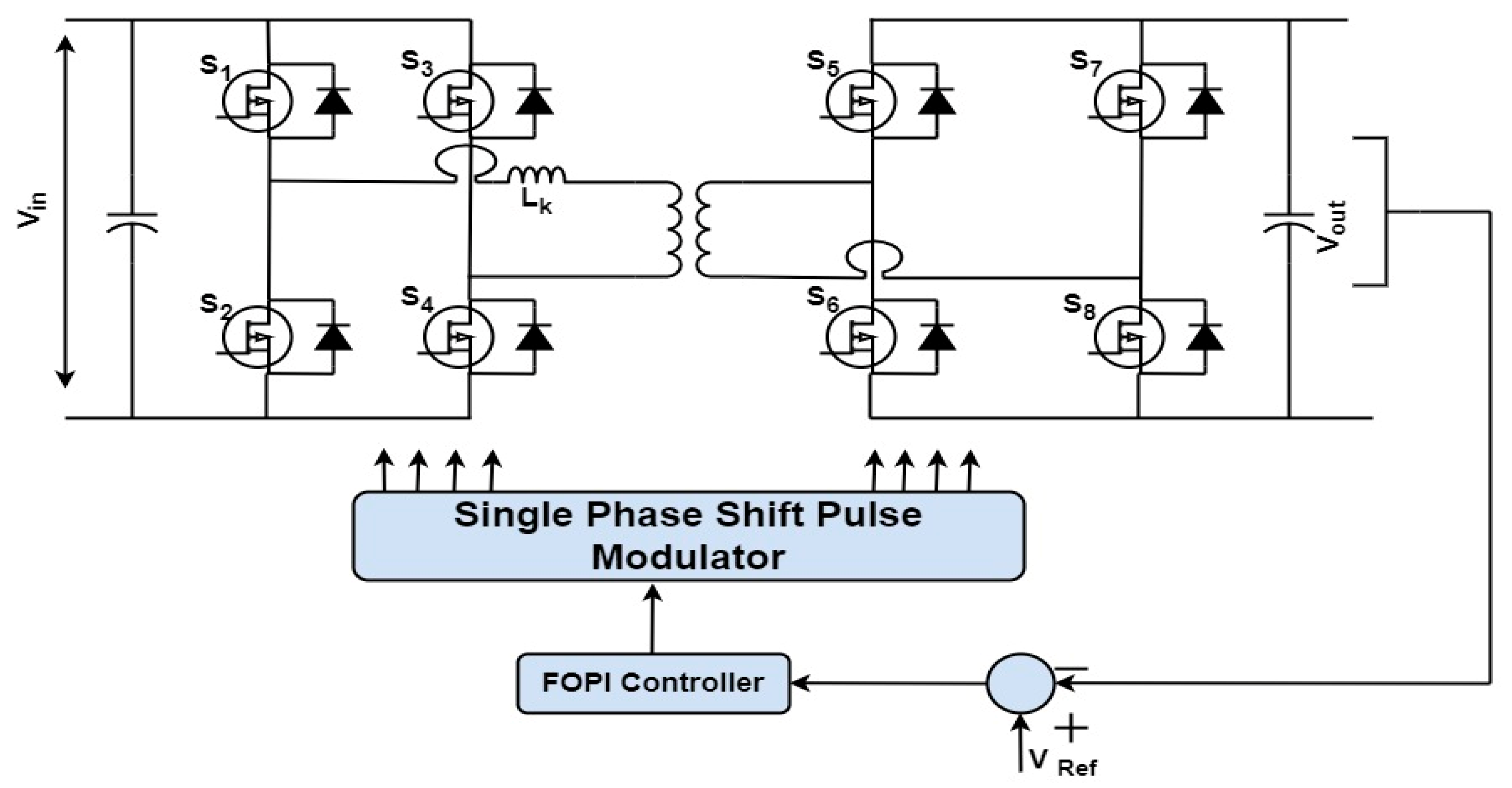
3. Control Architecture
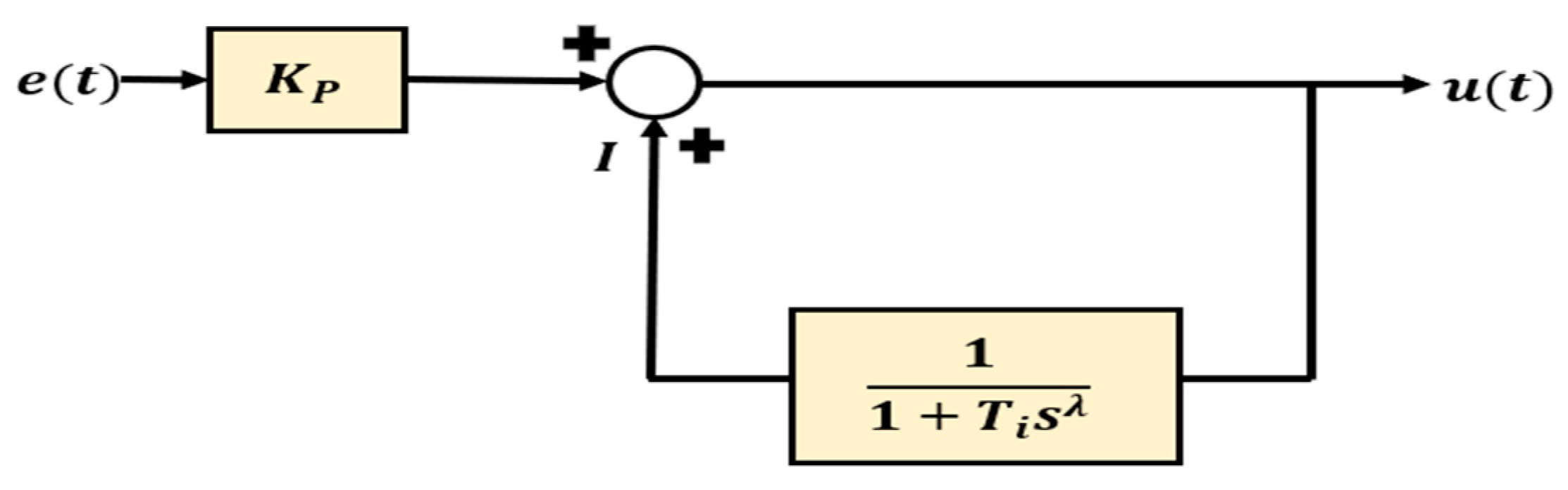
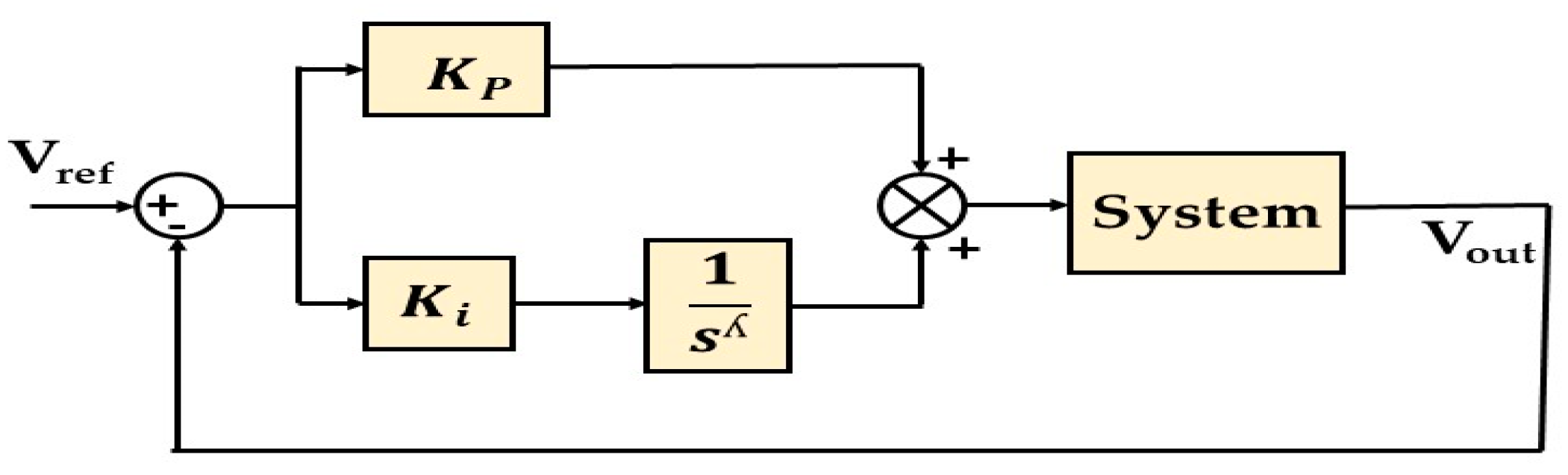
3.1. Fractional-Order PI Controller (FOPI)
3.2. Mathematical Modelling
3.3. Tuning FOPI Controller for DAB
4. Results and Analysis
- Explains the performance under constant rated load, as well as the overshoot and settling time analysis.
- Displays the system’s dynamic performance under line fluctuation.
- Explains the system’s dynamic performance under load fluctuation. In every case, the performance of the FOPI is contrasted with that of the conventional PI controller.
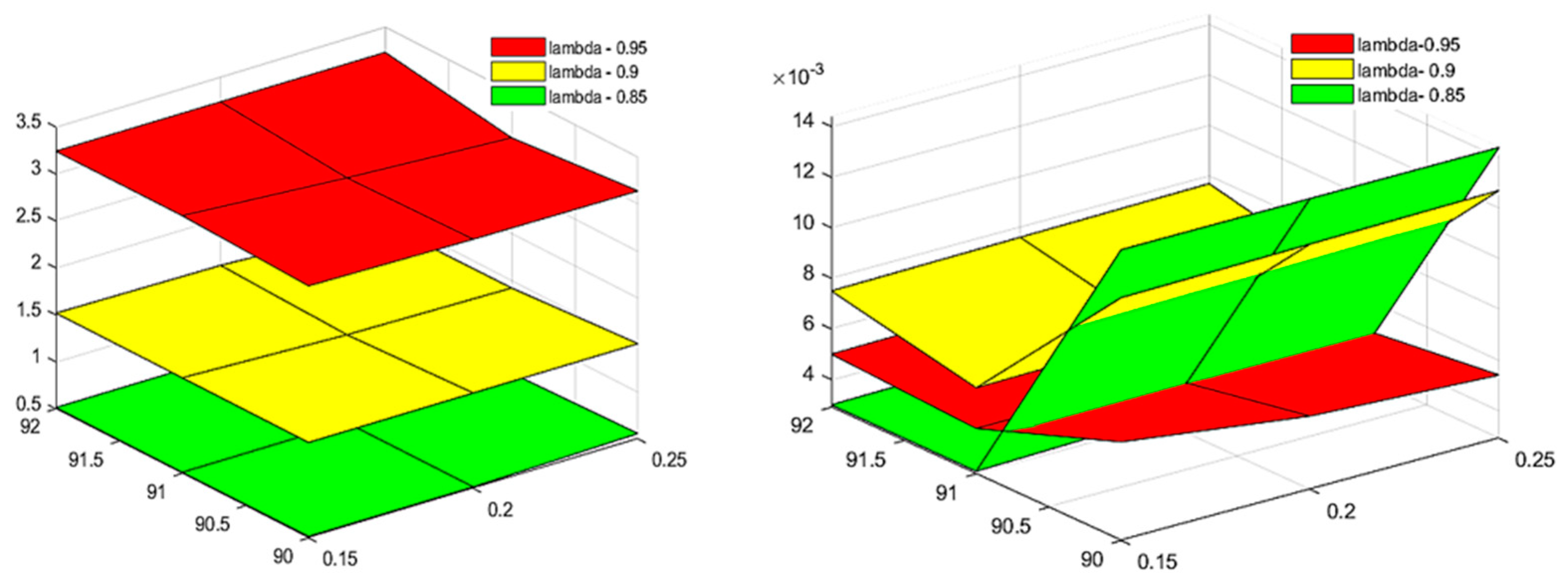
- Explains the effect of λ’s value over the FOPI controller regarding overshoot and settling duration for the same Kp, Ki values.
- Explains the controller’s performance indices in terms of ISE, IAE, and ITAE values.
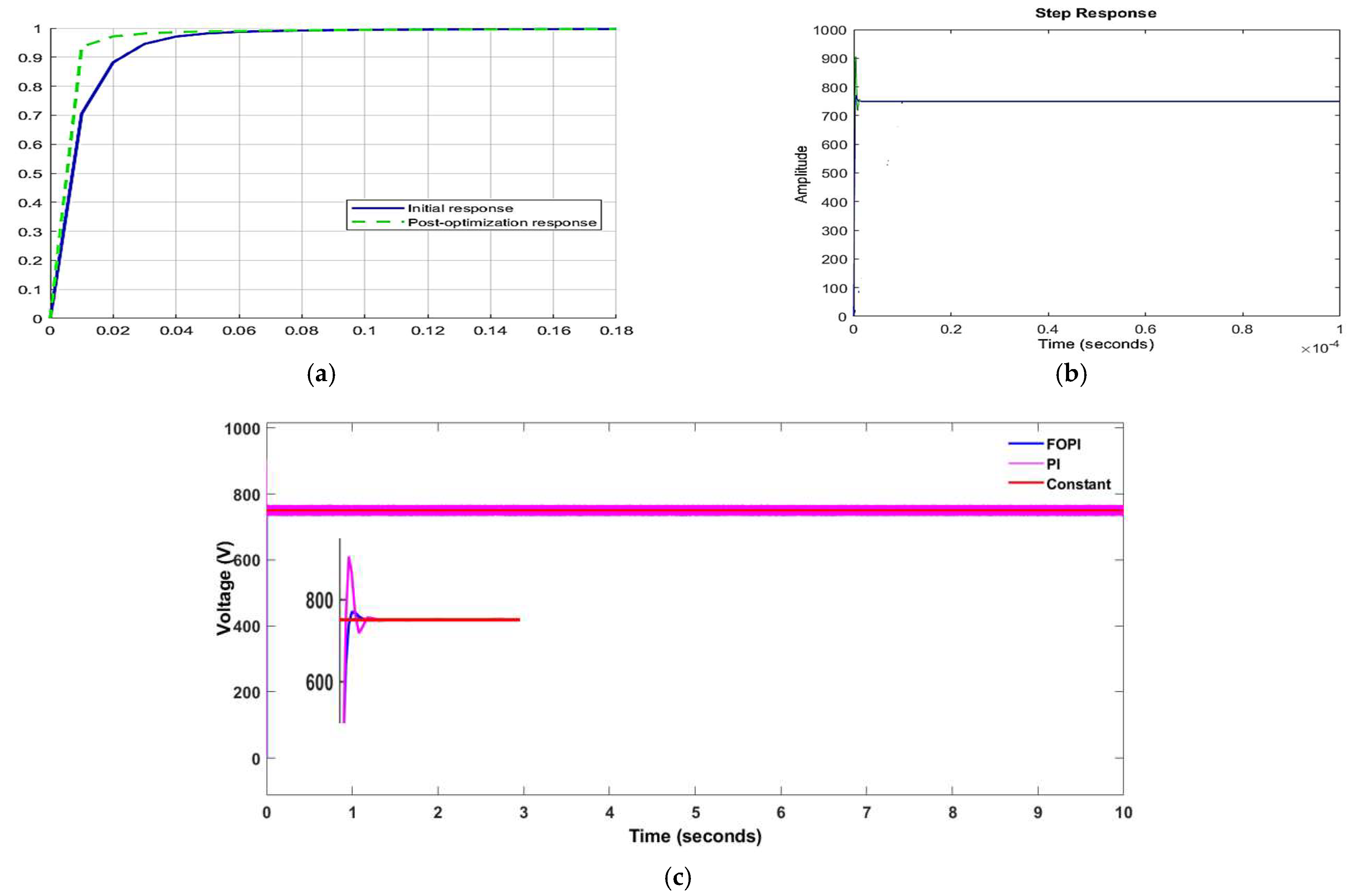
4.1. Performance Analysis under Constant Rated Load Using FOPI and Classical PI Controller
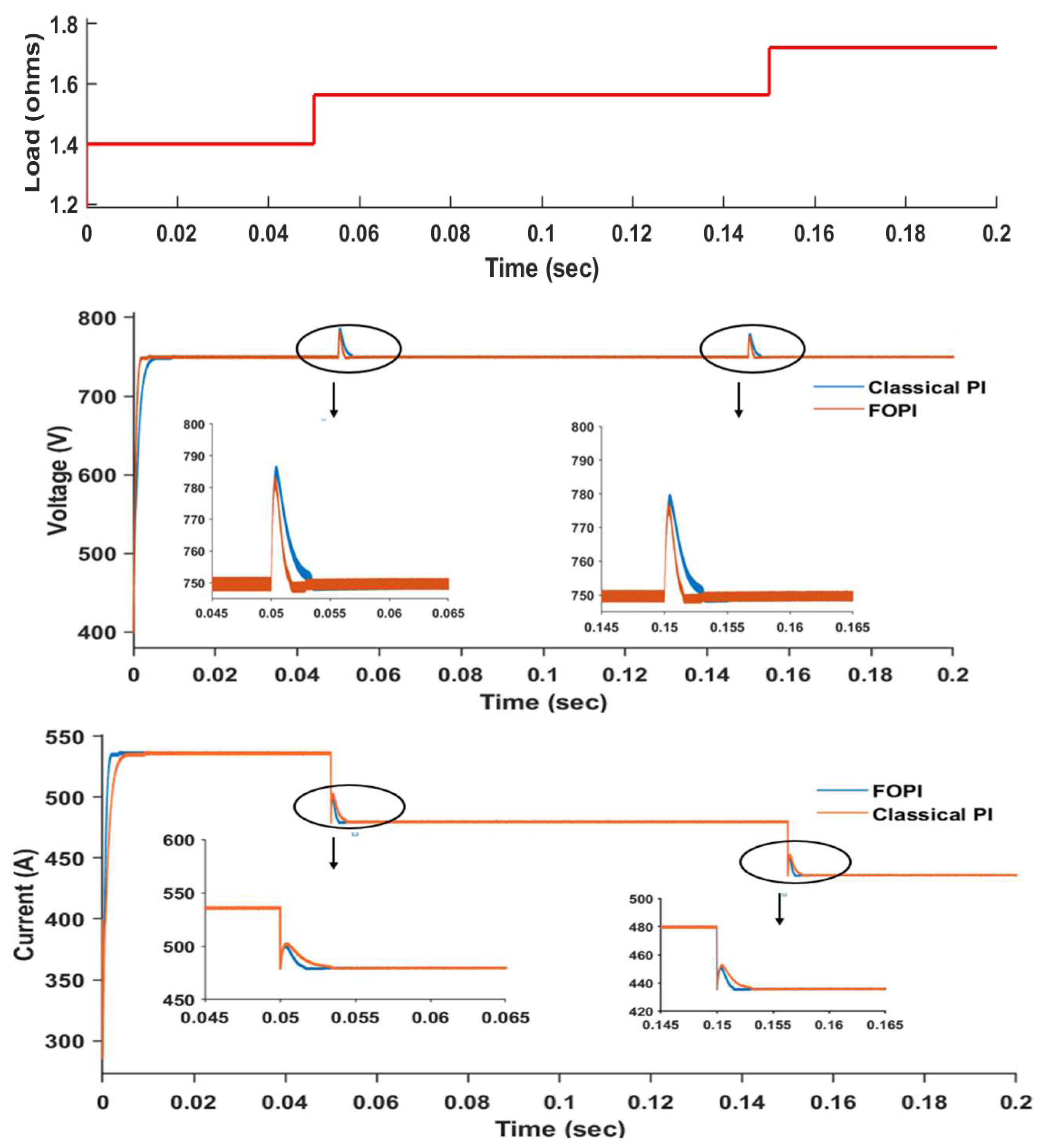
4.2. Steady-State Performance of the System under Load Variation
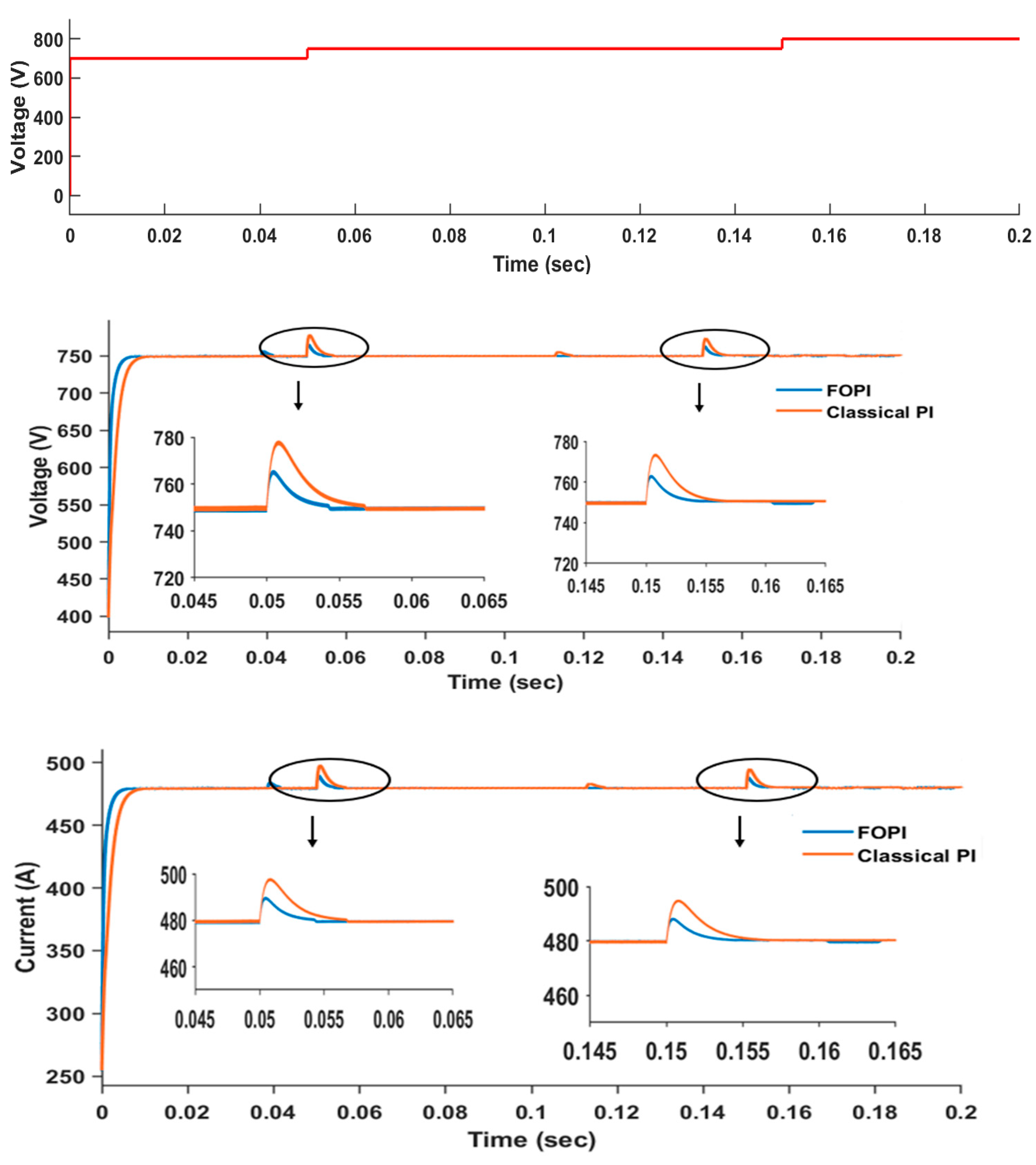
4.3. Steady-State Performance of the System under Line Variation
4.4. Performance Analysis of FOPI Controller under Different λ Values
4.5. Performance Evaluation of the Controllers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Variables | Definition | Units |
| Vpri, Vsec | Voltage across primary and secondary | Volts (V) |
| Lk | Leakage inductor | Henry (H) |
| Kp, Ki | Proportional and integral constant | |
| fsw | Switching frequency | Hertz (Hz) |
| Pout | Output power | Watt (W) |
| Iout | Output current | Ampere (A) |
| Phase shift | Radians |
References
- Baha, M.A.A.; Thomas, H.B. Review of Hybrid, Plug-In Hybrid, and Electric Vehicle Market Modelling Studies. Renew. Sustain. Energy Rev. 2013, 21, 190–203. [Google Scholar]
- Eldho, R.P.; Deepa, K. A Comprehensive Overview on the Current Trends and Technological Challenges in Energy Storages and Charging Mechanism in Electric Vehicle. J. Green Eng. 2020, 10, 4679–6713. [Google Scholar]
- Sruthy, V.; Raj, B.; Preetha, P.K.; Ilango, K. SPV based Floating Charging Station with Hybrid Energy Storage. In Proceedings of the 2019 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Tamilnadu, India, 11–13 April 2019; pp. 1–6. [Google Scholar]
- Khalid, M.R.; Khan, I.A.; Hameed, S.; Asghar, M.S.J.; Ro, J.-S. A Comprehensive Review on Structural Topologies, Power Levels, Energy Storage Systems, and Standards for Electric Vehicle Charging Stations and Their Impacts on Grid. IEEE Access 2021, 9, 128069–128094. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L.; Ulltveit-Moe, N.; Balapuwaduge, I.A.M. Optimal utilization of charging resources of fast charging station with opportunistic electric vehicle users. Batteries 2023, 9, 140. [Google Scholar] [CrossRef]
- Mounica, M.; Rajpathak, B.A.; Kolhe, M.L.; Naik, K.R.; Moparthi, J.R.; Kotha, S.K. Piece-Wise Droop Controller for Enhanced Stability in DC-Microgrid-Based Electric Vehicle Fast Charging Station. Processes 2024, 12, 892. [Google Scholar] [CrossRef]
- Nandhini, V.; Bharathi, K.; Giri, S.; Sowvav, S. Energy Management of and Smart Control of Home Appliances. J. Phys. 2020, 1706, 012087. [Google Scholar] [CrossRef]
- Khaligh, A.; Dusmez, S. Comprehensive topological analysis of conductive and inductive charging solutions for plug-in electric vehicles. IEEE Trans. Veh. Technol. 2012, 61, 3475–3489. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Raghavan, S.S.; Onar, O.C.; Khaligh, A. Power Electronic Interfaces for Future Plug-In Transportation Systems. IEEE Power Electron. Soc. Newsl. 2010, 24, 23–26. [Google Scholar]
- Biya, T.S.; Sindhu, M.R. Design and Power Management of Solar Powered Electric Vehicle Charging Station with Energy Storage System. In Proceedings of the 2019 3rd International conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 12–14 June 2019; pp. 815–820. [Google Scholar]
- Erb, D.C.; Onar, O.C.; Khaligh, A. Bi-directional Charging Topologies for Plug-in Hybrid Electric Vehicles. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2066–2072. [Google Scholar]
- Deepti, T.; Deepa, D.D.K.; Anoop, A. High Power Bi-Directional Converter for Electric Vehicle Application. In Proceedings of the 2023 3rd International Conference on Intelligent Technologies (CONIT), Hubli, India, 23–25 June 2023. [Google Scholar]
- Deepti, T.; Deepa, K.; Stonier, A.A.; Peter, G.; Anoop, A.; Ganji, V. Development and Efficiency Analysis of Dual Active Bridge Converter Employing SiC Devices using TMS 320F280039. IET Circuits Devices Syst. J. 2024. [Google Scholar]
- Aia, X.; Zuob, D.; Zhangc, Y. Modelling and Simulation of Dual-Active-Bridge Based on PI Control. J. Phys. Conf. Ser. 2022, 2221, 012007. [Google Scholar] [CrossRef]
- Babokany, A.S.; Jabbaril, M.; Shahgholian, G.; Mahdavian, M. A Review of Bidirectional Dual Active Bridge Converter. In Proceedings of the 2012 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phetchaburi, Thailand, 16–18 May 2012; pp. 978–981. [Google Scholar]
- Maroti, P.K.; Padmanaban, S.; Bhaskar, M.S.; Ramachandaramurthy, V.K.; Blaabjerg, F. The state-of-the-art of power electronics converters configurations in electric vehicle technologies. Power Electron. Devices Compon. J. 2021, 1, 100001. [Google Scholar] [CrossRef]
- Coelho, S.; Sousa, T.J.; Monteiro, V.; Machado, L.; Afonso, J.L.; Couto, C. Comparative Analysis and Validation of Different Modulation Strategies for an Isolated DC-DC Dual Active Bridge Converter. In Sustainable Energy for Smart Cities: Second EAI International Conference, SESC 2020, Viana do Castelo, Portugal, 4 December 2020; Proceedings 2; Springer International Publishing: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Liu, P.; Shanxu, D. A hybrid modulation strategy providing lower inductor current for the DAB converter with the aid of DC blocking capacitors. IEEE Trans. Power Electron. 2019, 35, 4309–4320. [Google Scholar] [CrossRef]
- Corti, F.; Bertolini, V.; Reatti, A.; Cardelli, E.; Giallongo, M. Comparison of Control Strategies for Dual Active Bridge Converter. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022. [Google Scholar]
- Calderon, C.; Barrado, A.; Rodriguez, A.; Alou, P.; Lazaro, A.; Fernandez, C.; Zumel, P. General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation. Energies 2018, 11, 2419. [Google Scholar] [CrossRef]
- Turzyński, M.; Bachman, S.; Jasiński, M.; Piasecki, S.; Ryłko, M.; Chiu, H.-J.; Kuo, S.-H.; Chang, Y.-C. Analytical Estimation of Power Losses in a Dual Active Bridge Converter Controlled with a Single-Phase Shift Switching Scheme. Energies 2022, 15, 8262. [Google Scholar] [CrossRef]
- Trivedi, S.S.; Sant, A. Comparative analysis of dual active bridge dc–dc converter employing Si, SiC and GaN MOSFETs for G2V and V2G operation. Energy Rep. 2022, 8, 1011–1019. [Google Scholar]
- Podlubny, I. Fractional Order System and PID controller. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Gholami Khesht, H.; Davari, P.; Blaabjerg, F. Adaptive Control in Power Electronic Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 125–147. [Google Scholar]
- Yang, M.; Liu, P. Research on Sliding Mode Control of Dual Active Bridge Converter Based on Linear Extended State Observer in Distributed Electric Propulsion System. Electronics 2023, 12, 3522. [Google Scholar] [CrossRef]
- Tiwary, N.; Naik, V.N.; Panda, A.K.; Narendra, A.; Lenka, R.K. Fuzzy Logic Based Direct Power Control of Dual Active Bridge Converter. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021. [Google Scholar]
- Fu, Y.; Jing, Z.; Ren, H.-P. Model predictive control for DAB under extended-phase-shift considering components uncertainty. IET Power Electron. 2023, 16, 1984–1995. [Google Scholar] [CrossRef]
- Fan, Y.; Shao, J.; Sun, G.; Shao, X. Proportional–Integral–Derivative Controller Design Using an Advanced Lévy-Flight Salp Swarm Algorithm for Hydraulic Systems. Energies 2020, 13, 459. [Google Scholar] [CrossRef]
- Balaji, B.; Krishnan KS, S.; Revathy, R.; Preetha, R. Fractional order PID controlled quasi Z-source inverter with front-line semiconductor material made of power electronics switches fed PMSM motor for EV applications. Mater. Today Proc. 2022, 69, 1322–1333. [Google Scholar] [CrossRef]
- Soriano-Sánchez, A.G.; Rodríguez-Licea, M.A.; Pérez-Pinal, F.J.; Vázquez-López, J.A. Fractional-Order Approximation and Synthesis of a PID Controller for a Buck Converter. Energies 2020, 13, 629. [Google Scholar] [CrossRef]
- Prajapati, S.; Garg, M.M.; Prithvi, B. Design of Fractional-Order PI controller for DC-DC Power Converters. In Proceedings of the 2018 8th IEEE India International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018. [Google Scholar]
- Warrier, P.; Shah, P. Fractional Order Control of Power Electronic Converters in Industrial Drives and Renewable Energy Systems, A Review. IEEE Access 2021, 9, 58982–59009. [Google Scholar] [CrossRef]
- Al-Saggaf, U.; Mehedi, I.; Bettayeb, M.; Mansouri, R. Fractional-order controller design for a heat flow process. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 680–691. [Google Scholar] [CrossRef]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y.Q. Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls. Fundamentals and Applications; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Zheng, W.; Luo, Y.; Pi, Y.; Chen, Y. Improved Frequency-Domain Design Method for the Fractional Order proportional–integral–derivative controller optimal design: A case study of permanent magnet synchronous motor speed control. IET Control Theory Appl. 2018, 12, 2478–2487. [Google Scholar] [CrossRef]
- Tajjudin, M.; Rahiman, M.H.F.; Arshad, N.M.; Adnan, R. Robust Fractional-Order PI Controller with Ziegler-Nichols Rules. Int. J. Electr. Comput. Eng. 2013, 7, 1034–1041. [Google Scholar]
- Gude, J.J.; Kahoraho, E. Modified Ziegler-Nichols method for fractional PI controllers. In Proceedings of the 2010 IEEE 15th Conference on Emerging Technologies & Factory Automation (ETFA 2010), Bilbao, Spain, 13–16 September 2010. [Google Scholar]
- Valério, D.; Sá da Costa, J. Tuning of fractional PID controllers with Ziegler-Nichols-type rules. Signal Process. 2006, 10, 2771–2784. [Google Scholar] [CrossRef]
- Hekimoglu, B. Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar] [CrossRef]
- Kesarkar, A.A.; Selvaganesan, N. Tuning of optimal fractional-order PID controller using an artificial bee colony algorithm. Syst. Sci. Control Eng. 2015, 3, 99–105. [Google Scholar] [CrossRef]
- Keyser, D.; Muresan, C.I.; Ionescu, C.M. A novel auto-tuning method for fractional order PI/PD controllers. ISA Trans. 2016, 62, 268–275. [Google Scholar] [CrossRef] [PubMed]
- Adhul, S.V.; Ananthan, T. FOPID Controller for Buck Converter. Procedia Comput. Sci. 2020, 171, 576–582. [Google Scholar]
- Sánchez, A.G.S.; Soto-Vega, J.; Tlelo-Cuautle, E.; Rodríguez-Licea, M.A. Fractional-Order Approximation of PID Controller for Buck–Boost Converters. Micromachines 2021, 12, 591. [Google Scholar] [CrossRef] [PubMed]
- Dong, Z.; Yang, P.; Li, Q.; Zhang, M.; Chang, Y.; Wang, S. Fractional order modelling and optimal control of dual active bridge converters. Syst. Sci. Control Eng. 2024, 12, 2347886. [Google Scholar] [CrossRef]
- Ma, F.; Wang, X.; Deng, L.; Zhu, Z.; Xu, Q.; Xie, N. Multiport Railway Power Conditioner and Its Management Control Strategy with Renewable Energy Access. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1405–1418. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, Y.; Wang, M.; Wang, K.; Huang, Y.; Xu, Z. Power Sharing and Storage-Based Regenerative Braking Energy Utilization for Sectioning Post in Electrified Railways. IEEE Trans. Transp. Electrif. 2024, 10, 2677–2688. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L.; Ulltveit-Moe, N.; Balapuwaduge, I.A.M. Reliability Enhancement of Fast Charging Station under Electric Vehicle Supply Equipment Failures and Repairs. Energies 2023, 16, 2933. [Google Scholar] [CrossRef]
- Rao, J.V.G.R.; Venkateshwarlu, S. Soft-switching dual active bridge converter-based bidirectional on-board charger for electric vehicles under vehicle-to-grid and grid-to-vehicle control optimization. J. Eng. Appl. Sci. 2024, 71, 49. [Google Scholar] [CrossRef]
- Ataullah, H.; Iqbal, T.; Khalil, I.U.; Ali, U.; Blazek, V.; Prokop, L.; Ullah, N. Analysis of the Dual Active Bridge-Based DC-DC Converter Topologies, High-Frequency Transformer, and Control Techniques. Energies 2022, 15, 8944. [Google Scholar] [CrossRef]
- Taylor, A.; Lu, J.; Zhu, L.; Bai, K.; McAmmond, M.; Brown, A. Comparison of SiC MOSFET-based and GaN HEMT-based high-efficiency high-power-density 7.2 kW EV battery chargers. IET Power Electron. 2018, 11, 1849–1857. [Google Scholar] [CrossRef]
- Adireddy, R.; Pratap, K.N.G.A.; Himaja, T.; Murthy, K.V.S.R. Circuit analysis and modelling of dual active bridge bidirectional converter. Mater. Today 2022, 56, 3272–3275. [Google Scholar] [CrossRef]
- Eyvazi, H.; Alimohammadi, Z.; Sheikhi, A.; Adelighalehtak, Y.; Aliasghari, T.P. Analysis of dual active bridge-based on-board battery charger for electric and hybrid vehicles. Int. J. Sci. Res. Arch. 2024, 12, 216–230. [Google Scholar] [CrossRef]
- Padula, F.; Visioli, A. Tuning rules for optimal PID and fractional-order PID controllers. J. Process Control 2011, 21, 69–81. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Input voltage | 750 V |
| Output voltage | 750 V |
| Turns ratio | 1 |
| Switching frequency | 100 kHz |
| Inductor | 2.6 µH |
| Load | 1.563 Ω |
| Output current | 480 A |
| Output power | 360 kW |
| Controller | Gain Margin (dB) | Phase Margin (deg) | Lambda (λ) |
|---|---|---|---|
| IOPI | 9.56 | 58.3 | Nil |
| FOPI | 9.86 | 60.2 | 0.95 |
| 11.9 | 79.8 | 0.9 | |
| 12.3 | 83.5 | 0.85 |
| Parameters | FOPI | Classical PI |
|---|---|---|
| Overshoot (%) | 0.5254 | 0.5277 |
| Settling time (ms) | 3.2 | 5.1 |
| Rise time (ms) | 0.557 | 0.958 |
| Peak time (ms) | 18.42 | 19.23 |
| Steady-state error (%) | 0.04 | 0.072 |
| Controller | Settling Time (ms) | Voltage Drop (%) |
|---|---|---|
| FOPI | 15.08 | 3.2 |
| Classical PI | 20.5 | 4.8 |
| Controller | ISE | IAE | ITAE |
|---|---|---|---|
| FOPI | 16.67 | 0.3984 | 0.02101 |
| Classical PI | 23.37 | 0.5074 | 0.02143 |
| Parameters | Ref [46] | FOPI |
|---|---|---|
| Overshoot | Within 5% limit- | 1.33% (under line variation) |
| 1.6% (under load variation) | ||
| ITAE | 0.02453 (PI controller) | 0.02143 (PI controller) |
| Complexity | Higher complexity | Lower complexity |
| Computational Time | More | Lesser |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thaliyadath, D.; Kaliyaperumal, D.; Kolhe, M.L. Enhancing Transient Response in a DC-DC Converter for Electric Vehicle DC Fast Charging Applications Using Fractional-Order PI Control. Energies 2024, 17, 4312. https://doi.org/10.3390/en17174312
Thaliyadath D, Kaliyaperumal D, Kolhe ML. Enhancing Transient Response in a DC-DC Converter for Electric Vehicle DC Fast Charging Applications Using Fractional-Order PI Control. Energies. 2024; 17(17):4312. https://doi.org/10.3390/en17174312
Chicago/Turabian StyleThaliyadath, Deepti, Deepa Kaliyaperumal, and Mohan Lal Kolhe. 2024. "Enhancing Transient Response in a DC-DC Converter for Electric Vehicle DC Fast Charging Applications Using Fractional-Order PI Control" Energies 17, no. 17: 4312. https://doi.org/10.3390/en17174312
APA StyleThaliyadath, D., Kaliyaperumal, D., & Kolhe, M. L. (2024). Enhancing Transient Response in a DC-DC Converter for Electric Vehicle DC Fast Charging Applications Using Fractional-Order PI Control. Energies, 17(17), 4312. https://doi.org/10.3390/en17174312