
A Novel PI-Based Control Structure with Additional Feedback from Torsional Torque and Its Derivative for Damping Torsional Vibrations

 ,
, 
 and
and
Abstract
1. Introduction
- -
- an analysis of the control system with a PI controller and with one additional feedback from the torsional moment or the derivative of the torsional torque; presentation of mathematical equations allowing for the placing of the poles of the closed-loop system on a complex plane;
- -
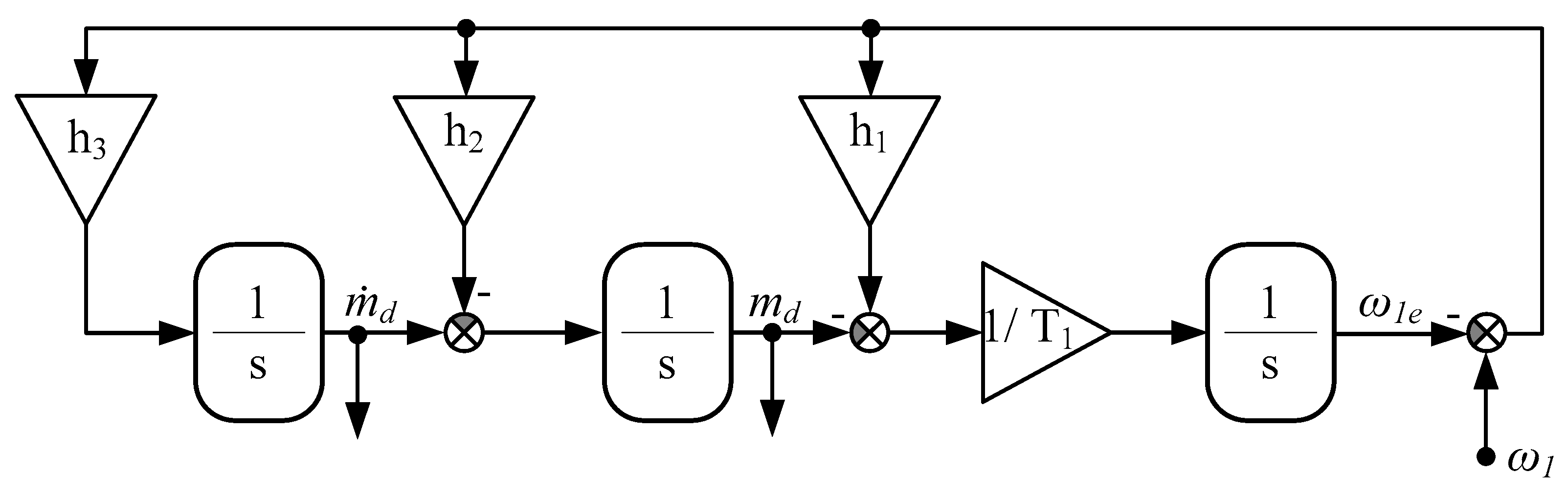
- an analysis of a proposed control system with a PI controller and with two additional feedbacks from the torsional moment and its derivative; developing the analytical formulas for the location of the system closed-loop poles at a complex plane;
- -
- a critical comparative analysis of the three considered systems;
- -
- developing the integral observer for estimation of the torsional torque and its derivative; presentation of the analytical formulas allowing shifting poles of the observer in the desired location.
- -
- simulation and experimental verification of the proposed control structure.
2. Mathematical Model of the Plant and Proposed Control Structures
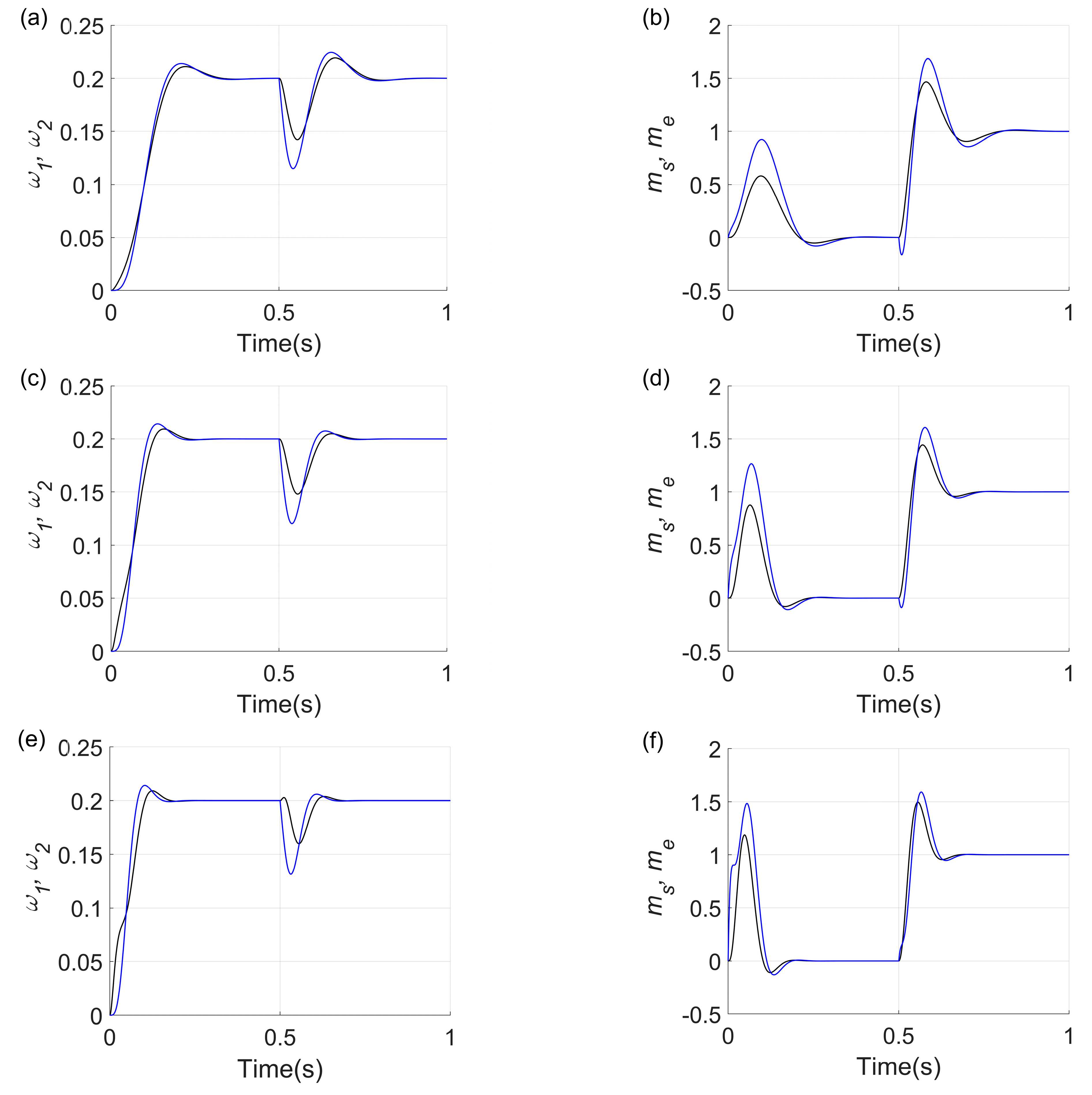
3. Simulation Study
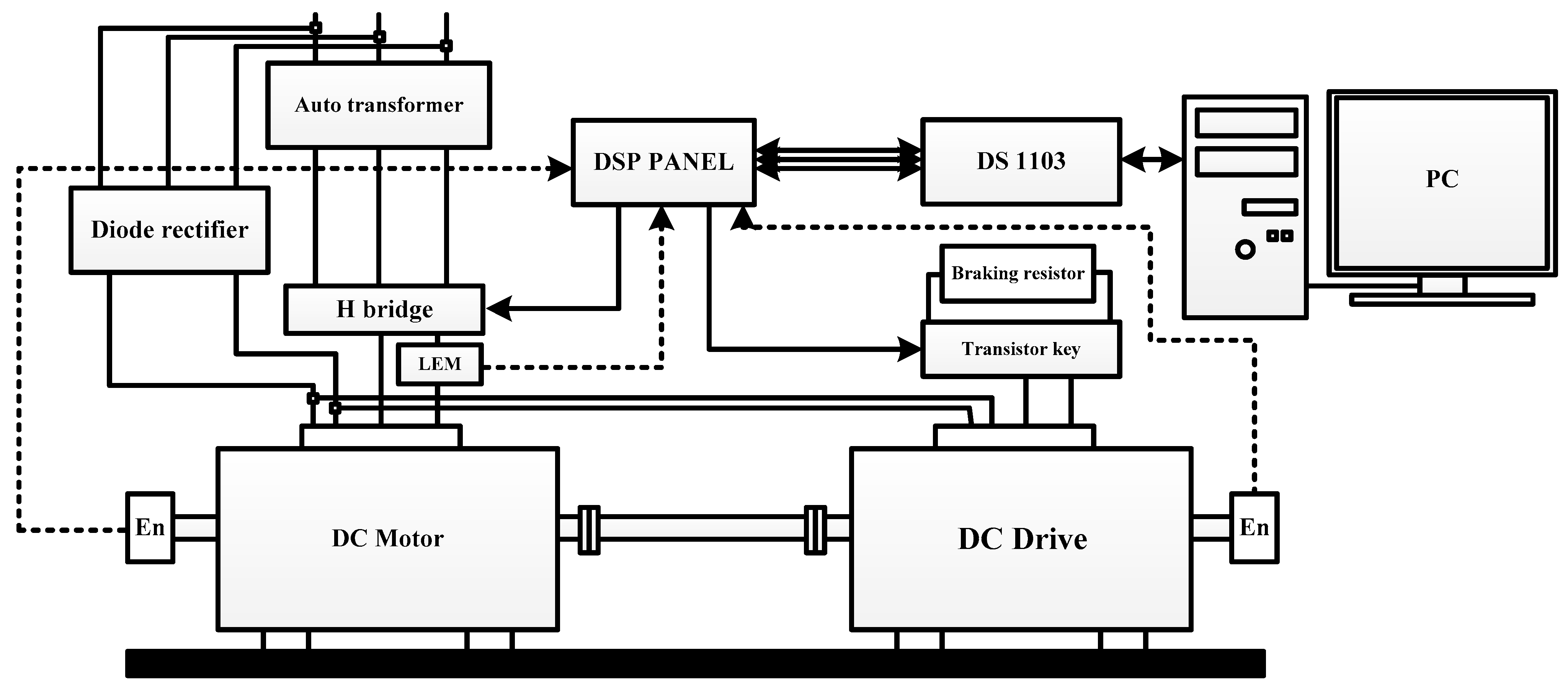
4. Experimental Study
5. Discussion
- -
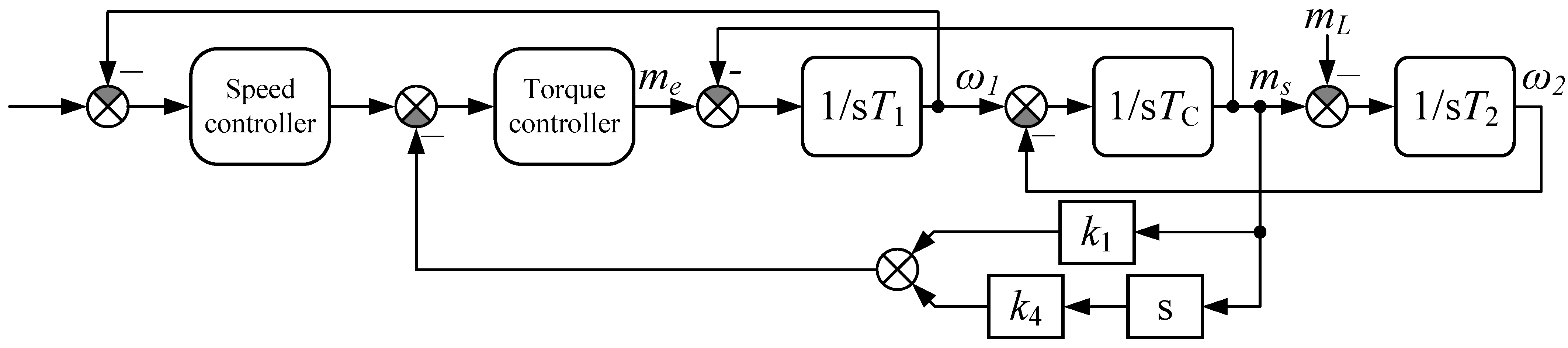
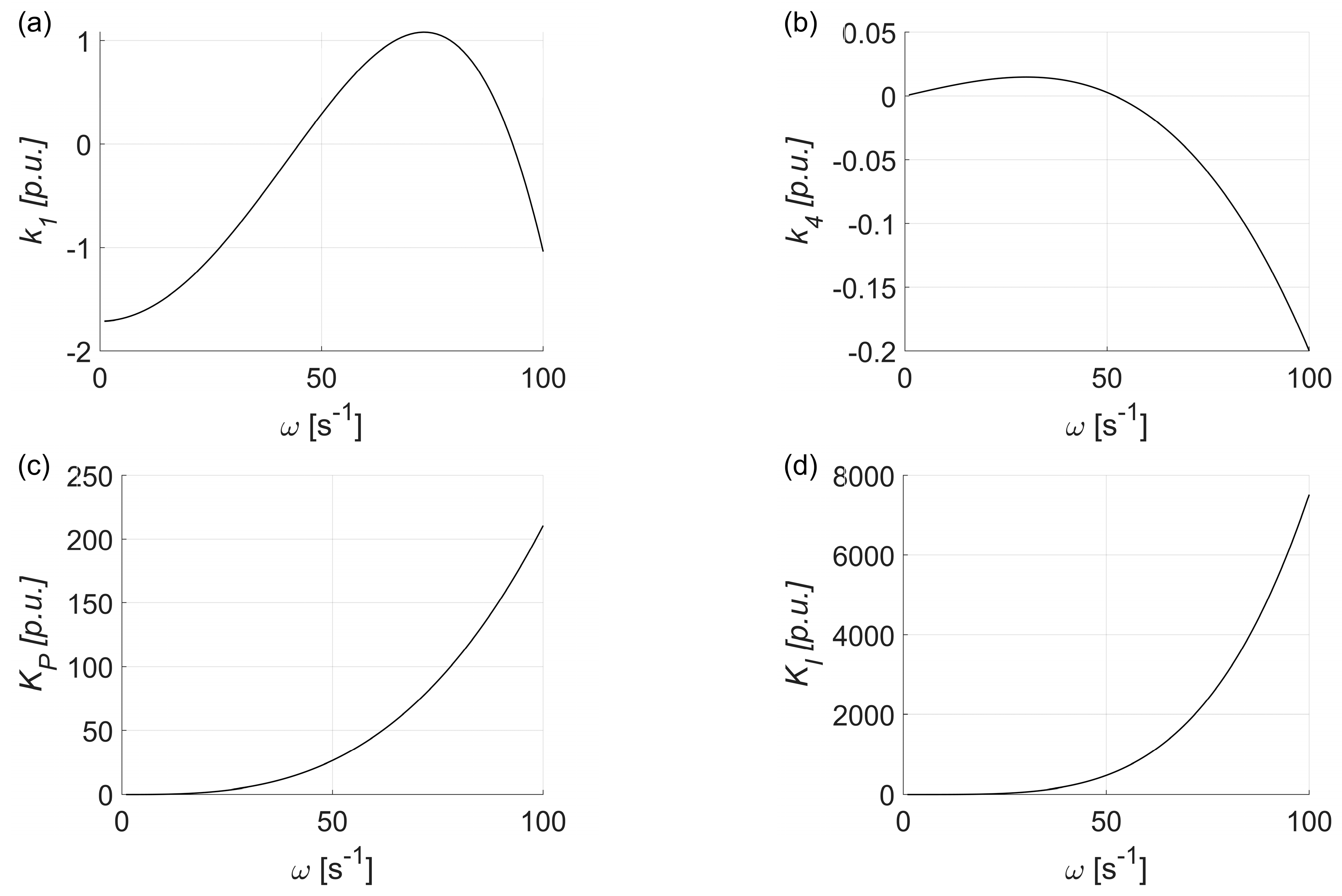
- Several control methods in the literature provide active damping of torsional vibrations. One of the most popular approaches uses additional feedback from the torsional torque, and less commonly used is a structure with additional feedback from a derivative of torsional torque and with two such feedbacks. Structures with one additional feedback allow the set of the desired value of the damping ratio but not the value of the resonance pulsation. The proposed structure with two feedbacks allows the independent location of the system’s closed-loop poles. A structure with one additional feedback is a special case of a structure with two feedbacks, in which the values of k1 or k4 are zero.
- -
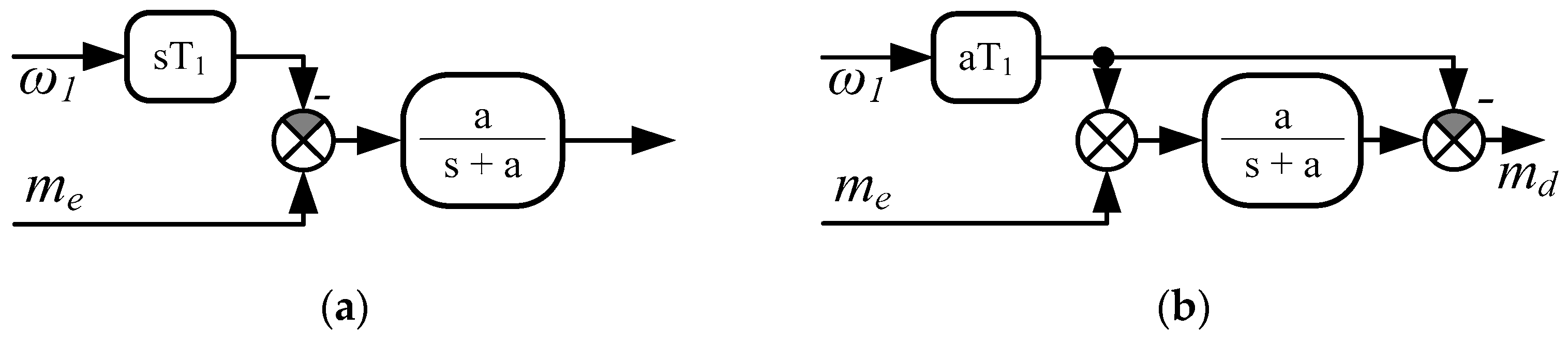
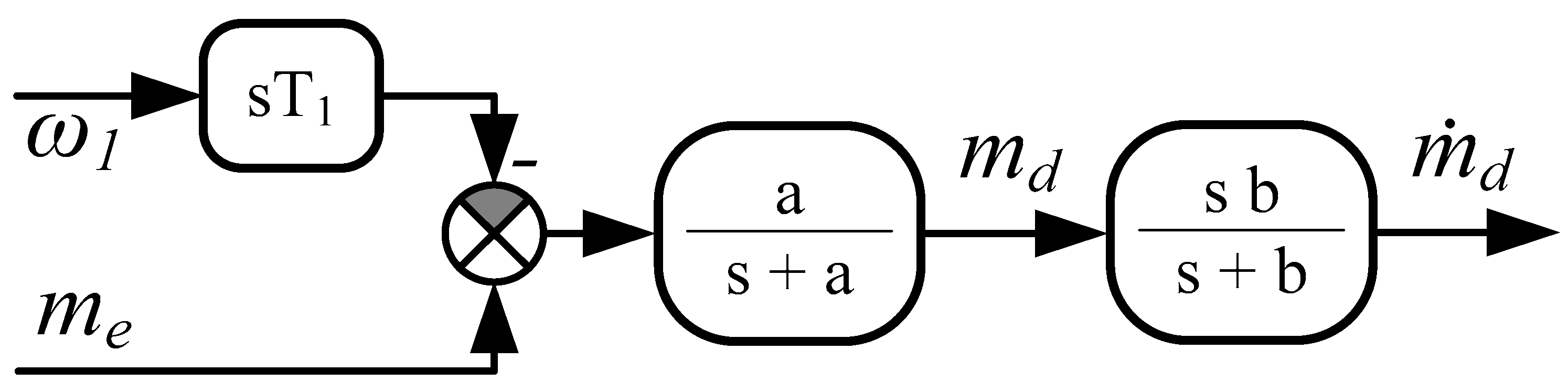
- The proposed control structure with two feedbacks requires additional variables (torsional moment and its derivative). Because they are not accessible in standard drives, there is a need to apply the special estimator. According to the literature, a commonly used solution is a disturbance observer. Nevertheless, derivative operation results in the amplification of the measurement noises. To reduce the noises, the low-pass filter is applied, which, however, causes delays in the estimated signals.
- -
- The integral observer proposed in this paper allows increases in the estimation quality significantly as compared to the classical disturbance observer. This is because the differential operations are replaced by integral terms. The proposed observer does not include the parameters of the drive shaft and the load machine in its structure. This means that it is not sensitive to the change of these parameters. The quality of the estimated values depends only on the time constant of the driving motor, which is not changeable.
6. Conclusions
- -
- designing an estimator that provides less noise in the estimated variables, and the use of a Kalman filter or sliding-mode observer in this task is considered
- -
- designing a control structure robust against changes in the parameters of load machine and mechanical coupling.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nguyen, V.B.; Bui, X.C. Hybrid Vibration Control Algorithm of a Flexible Manipulator System. Robotics 2023, 12, 73. [Google Scholar] [CrossRef]
- Zawirski, K.; Brock, S.; Nowopolski, K. Recursive Neural Network as a Multiple Input–Multiple Output Speed Controller for Electrical Drive of Three-Mass System. Energies 2024, 17, 172. [Google Scholar] [CrossRef]
- Liu, Y.; Song, B.; Zhou, X.; Gao, Y.; Chen, T. An Adaptive Torque Observer Based on Fuzzy Inference for Flexible Joint Application. Machines 2023, 11, 794. [Google Scholar] [CrossRef]
- Kabziński, J.; Mosiołek, P. Integrated, Multi-Approach, Adaptive Control of Two-Mass Drive with Nonlinear Damping and Stiffness. Energies 2021, 14, 5475. [Google Scholar] [CrossRef]
- Chen, L.; Du, X.; Hu, B.; Blaabjerg, F. Drivetrain Oscillation Analysis of Grid Forming Type-IV Wind Turbine. IEEE Trans. Energy Convers. 2022, 37, 2321–2337. [Google Scholar] [CrossRef]
- Rudniev, Y.; Romanchenko, J.; Morneva, M. Investigation of Oscillatory Processes in Mechatronic Systems with a Robust H∞-controller. In Proceedings of the 2023 IEEE 5th International Conference on Modern Electrical and Energy System (MEES), Kremenchuk, Ukraine, 27–30 September 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Yamada, S.; Fujimoto, H. Precise Joint Torque Control Method for Two-inertia System with Backlash Using Load-side Encoder. IEEJ J. Ind. Appl. 2019, 8, 75–83. [Google Scholar] [CrossRef]
- Li, P.; Wang, L.; Zhong, B.; Zhang, M. Linear Active Disturbance Rejection Control for Two-Mass Systems Via Singular Perturbation Approach. IEEE Trans. Ind. Inform. 2022, 18, 3022–3032. [Google Scholar] [CrossRef]
- Sakaino, S.; Kitamura, T.; Mizukami, N.; Tsuji, T. High-Precision Control for Functional Electrical Stimulation Utilizing a High-Resolution Encoder. IEEJ J. Ind. Appl. 2021, 10, 124–133. [Google Scholar] [CrossRef]
- Wu, T.-Y.; Chen, C.-Y. Active vibration isolation on electromechanical coupling suspension system of a quar-ter-vehicle via modal space controller design. J. Vib. Control 2024, 2024, 10775463241252190. [Google Scholar] [CrossRef]
- Yang, T.; Xu, F.; Zhao, S.; Li, T.; Yang, Z.; Wang, Y.; Liu, Y. A High-Certainty Visual Servo Control Method for a Space Manipulator with Flexible Joints. Sensors 2023, 23, 6679. [Google Scholar] [CrossRef]
- Stanislawski, R.; Tapamo, J.-R.; Kaminski, M. Virtual Signal Calculation Using Radial Neural Model Applied in a State Controller of a Two-Mass System. Energies 2023, 16, 5629. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, J.; Wang, Y.; Kambrath, J.K.; Loh, P.C.; Blaabjerg, F.; Gupta, A.K. Torsional Vibration Suppression Control for Inverter-Driven Multi-Rotating Mass System Using Non-Ideal Generalized Integrator. IEEE Trans. Power Electron. 2023, 39, 2594–2607. [Google Scholar] [CrossRef]
- Radionov, A.A.; Karandaev, A.S.; Gasiyarov, V.R.; Loginov, B.M.; Gartlib, E.A. Development of an Automatic Elastic Torque Control System Based on a Two-Mass Electric Drive Coordinate Observer. Machines 2021, 9, 305. [Google Scholar] [CrossRef]
- Łuczak, D. Nonlinear Identification with Constraints in Frequency Domain of Electric Direct Drive with Multi-Resonant Mechanical Part. Energies 2021, 14, 7190. [Google Scholar] [CrossRef]
- Kraus, K.; Šika, Z.; Beneš, P.; Krivošej, J.; Vyhlídal, T. Mechatronic robot arm with active vibration absorbers. J. Vib. Control. 2020, 26, 1145–1156. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, Q.; Zhang, H.; Miao, L. Adaptive Control and Predictive Control for Torsional Vibration Suppression in Helicopter/Engine System. IEEE Access 2018, 6, 23896–23906. [Google Scholar] [CrossRef]
- Wu, S.-T.; Lian, S.-H.; Chen, S.-H. Vibration control of a flexible beam driven by a ball-screw stage with adaptive notch filters and a line enhancer. J. Sound Vib. 2015, 348, 71–87. [Google Scholar] [CrossRef]
- Zhang, G.; Furusho, J. Speed control of two-inertia system by PI/PID control. IEEE Trans. Ind. Electron. 2000, 47, 603–609. [Google Scholar] [CrossRef]
- Goubej, M. Fundamental performance limitations in PID controlled elastic two-mass systems. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 828–833. [Google Scholar] [CrossRef]
- Szabat, K.; Orlowska-Kowalska, T. Vibration Suppression in a Two-Mass Drive System Using PI Speed Controller and Additional Feedbacks—Comparative Study. IEEE Trans. Ind. Electron. 2007, 54, 1193–1206. [Google Scholar] [CrossRef]
- Sugiura, K.; Hori, Y. Vibration suppression in 2- and 3-mass system based on the feedback of imperfect derivative of the estimated torsional torque. IEEE Trans. Ind. Electron. 1996, 43, 56–64. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Ohnishi, K. A Guide to Design Disturbance Observer. J. Dyn. Syst. Meas. Control. 2013, 136, 021011. [Google Scholar] [CrossRef]
- Li, X.; Shang, D.; Li, H.; Li, F. Resonant Suppression Method Based on PI control for Serial Manipulator Servo Drive System. Sci. Prog. 2020, 103, 0036850420950130. [Google Scholar] [CrossRef] [PubMed]
- Thomsen, S.; Hoffmann, N.; Fuchs, F.W. PI Control, PI-Based State Space Control, and Model-Based Predictive Control for Drive Systems With Elastically Coupled Loads—A Comparative Study. IEEE Trans. Ind. Electron. 2011, 58, 3647–3657. [Google Scholar] [CrossRef]
- Szczepanski, R.; Kaminski, M.; Tarczewski, T. Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System. Energies 2020, 13, 3067. [Google Scholar] [CrossRef]
- Saarakkala, S.E.; Hinkkanen, M. State-Space Speed Control of Two-Mass Mechanical Systems: Analytical Tuning and Experimental Evaluation. IEEE Trans. Ind. Appl. 2014, 50, 3428–3437. [Google Scholar] [CrossRef]
- Serkies, P.; Szabat, K. Effective damping of the torsional vibrations of the drive system with an elastic joint based on the forced dynamic control algorithms. J. Vib. Control. 2019, 25, 2225–2236. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Huang, W.; Chen, S. DC-Link Voltage Regulation for Wind Power System by Complementary Sliding Mode Control. IEEE Access 2019, 7, 22773–22780. [Google Scholar] [CrossRef]
- Wang, C.; Liu, F.; Xu, J.; Pan, J. A SMC-based Accurate and Robust Load Speed Control Method for Elastic Servo System. IEEE Trans. Ind. Electron. 2023, 71, 2300–2308. [Google Scholar] [CrossRef]
- Chang, H.; Lu, S.; Huang, G.; Zheng, S.; Song, B. An extended active resonance suppression scheme based on a dual-layer network for high-performance double-inertia drive system. IEEE Trans. Power Electron. 2023, 38, 13717–13729. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Kaminski, M.; Szabat, K. Implementation of a Sliding-Mode Controller With an Integral Function and Fuzzy Gain Value for the Electrical Drive With an Elastic Joint. IEEE Trans. Ind. Electron. 2009, 57, 1309–1317. [Google Scholar] [CrossRef]
- Wai, R.-J. Fuzzy Sliding-Mode Control Using Adaptive Tuning Technique. IEEE Trans. Ind. Electron. 2007, 54, 586–594. [Google Scholar] [CrossRef]
- Pajchrowski, T.; Siwek, P.; Wójcik, A. Adaptive controller design for electric drive with variable parameters by Reinforcement Learning method. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 1019–1030. [Google Scholar] [CrossRef]
- Jastrzębski, M.; Kabziński, J.; Mosiołek, P. Adaptive Position Control for Two-Mass Drives with Nonlinear Flexible Joints. Energies 2024, 17, 425. [Google Scholar] [CrossRef]
- Wang, X.; Ufnalski, B.; Grzesiak, L.M. Adaptive speed control in the PMSM drive for a non-stationary repetitive process using particle swarms. In Proceedings of the 2016 10th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Bydgoszcz, Poland, 29 June–1 July 2016; pp. 464–471. [Google Scholar]
- Szabat, K.; Orlowska-Kowalska, T. Application of the Kalman Filters to the High-Performance Drive System With Elastic Cou-pling. IEEE Trans. Ind. Electron. 2012, 59, 4226–4235. [Google Scholar] [CrossRef]
- Quevedo, D.E.; Aguilera, R.P.; Geyer, T. Predictive control in power electronics and drives: Basic concepts, theory, and methods. Adv. Intell. Control Power Electron. Drives 2014, 2014, 181–226. [Google Scholar]
- Cychowski, M.; Szabat, K.; Orlowska-Kowalska, T. Constrained Model Predictive Control of the Drive System With Mechanical Elasticity. IEEE Trans. Ind. Electron. 2009, 56, 1963–1973. [Google Scholar] [CrossRef]
- Šlapák, V.; Kyslan, K.; Lacko, M.; Fedák, V.; Ďurovský, F. Finite Control Set Model Predictive Speed Control of a DC Motor. Math. Probl. Eng. 2016, 2016, 9571972. [Google Scholar] [CrossRef]
- Serkies, P. A novel predictive fuzzy adaptive controller for a two-mass drive system, Bulletin of the Polish Academy of Sciences. Tech. Sci. 2018, 66, 37–47. [Google Scholar]
- Wang, C.; Yang, M.; Zheng, W.; Long, J.; Xu, D. Vibration Suppression With Shaft Torque Limitation Using Explicit MPC-PI Switching Control in Elastic Drive Systems. IEEE Trans. Ind. Electron. 2015, 62, 6855–6867. [Google Scholar] [CrossRef]
- Yang, M.; Wang, C.; Xu, D.; Zheng, W.; Lang, X. Shaft Torque Limiting Control Using Shaft Torque Compensator for Two-Inertia Elastic System With Backlash. IEEE/ASME Trans. Mechatron. 2016, 21, 2902–2911. [Google Scholar] [CrossRef]
- Serkies, P.; Gorla, A. Implementation of PI and MPC-Based Speed Controllers for a Drive with Elastic Coupling on a PLC Controller. Electronics 2021, 10, 3139. [Google Scholar] [CrossRef]
- Fuentes, E.J.; Silva, C.A.; Yuz, J.I. Predictive Speed Control of a Two-Mass System Driven by a Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2011, 59, 2840–2848. [Google Scholar] [CrossRef]
- Kabziński, J.; Mosiołek, P. Observer-Based, Robust Position Tracking in Two-Mass Drive System. Energies 2022, 15, 9093. [Google Scholar] [CrossRef]
- Krisztián, H.; Kuslits, M. Dynamic performance of estimator-based speed sensorless control of induction machines using extended and unscented Kalman filters. Power Electron. Drives 2018, 3, 129–144. [Google Scholar]
- Zhu, M.; Xiao, S.; Yu, F. Torque Estimation for Robotic Joint with Harmonic Drive Transmission Based on System Dynamic Characteristics. J. Syst. Eng. Electron. 2022, 33, 1320–1331. [Google Scholar]
- Wang, Y.; Li, J. Equivalent-Input-Disturbance-Based Speed Control of Two-Mass System Using Generalized Extended State Observer. In Proceedings of the 2023 10th International Forum on Electrical Engineering and Automation (IFEEA), Nanjing, China, 3–5 November 2023; pp. 870–873. [Google Scholar]
- Wang, C.; Liu, J.; Xin, L.; Li, G.; Pan, J. Design of Full-Order State Observer for Two-Mass Joint Servo System Based on the Fixed Gain Filter. IEEE Trans. Power Electron. 2022, 37, 10466–10475. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal of Load Speed Required | Remarks | Properties | |
|---|---|---|---|
| PI-based control structure with one additional feedback | Yes/No | Simple or complicated estimator (depends on the type of feedback) | Limited dynamic |
| PI-based control structure with feedback from torsional torque and motor speed | Yes | Complicated estimator needed | Good dynamic |
| State controller | Yes | Complicated estimator needed | Good dynamic |
| FDC-based control structure | Yes | More complicated estimator needed | Good dynamic, robust to load torque changes |
| Adaptive system | Yes | More complicated estimator needed | Good dynamic, robust to parameter changes |
| Sliding-mode system | Yes | More complicated estimator needed | Very good dynamic, robust to parameter changes |
| MPC system | Yes | Complicated estimator needed | Very good dynamic, complicated algorithm, Constraints directly addressed |
| Proposed control structure | No | Simple estimator needed | Good dynamic |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Derugo, P.; Kahsay, A.H.; Szabat, K.; Shikata, K.; Katsura, S. A Novel PI-Based Control Structure with Additional Feedback from Torsional Torque and Its Derivative for Damping Torsional Vibrations. Energies 2024, 17, 4786. https://doi.org/10.3390/en17194786
Derugo P, Kahsay AH, Szabat K, Shikata K, Katsura S. A Novel PI-Based Control Structure with Additional Feedback from Torsional Torque and Its Derivative for Damping Torsional Vibrations. Energies. 2024; 17(19):4786. https://doi.org/10.3390/en17194786
Chicago/Turabian StyleDerugo, Piotr, Amanuel Haftu Kahsay, Krzysztof Szabat, Kosuke Shikata, and Seiichiro Katsura. 2024. "A Novel PI-Based Control Structure with Additional Feedback from Torsional Torque and Its Derivative for Damping Torsional Vibrations" Energies 17, no. 19: 4786. https://doi.org/10.3390/en17194786
APA StyleDerugo, P., Kahsay, A. H., Szabat, K., Shikata, K., & Katsura, S. (2024). A Novel PI-Based Control Structure with Additional Feedback from Torsional Torque and Its Derivative for Damping Torsional Vibrations. Energies, 17(19), 4786. https://doi.org/10.3390/en17194786