3.2.3. Magnetic Performance
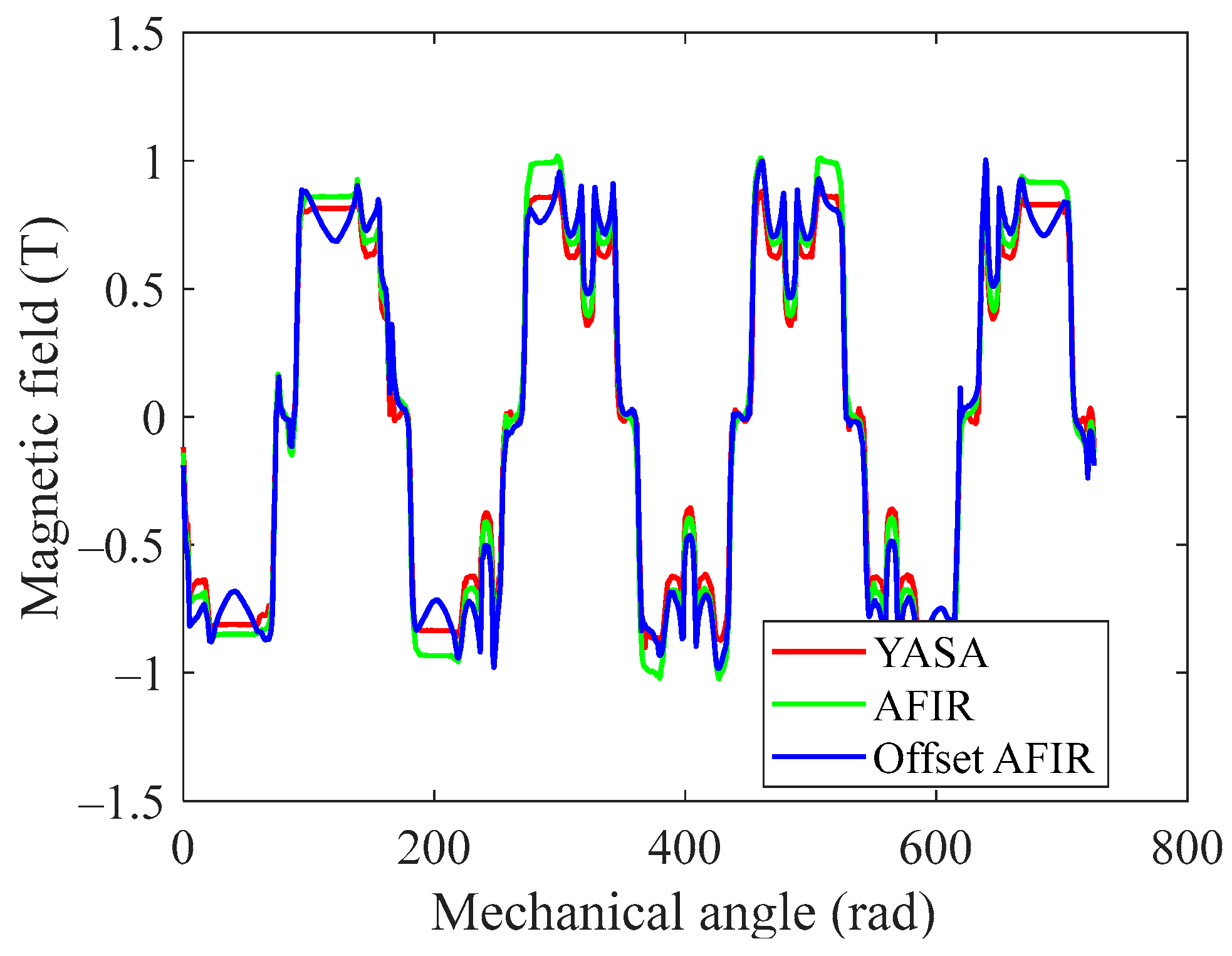
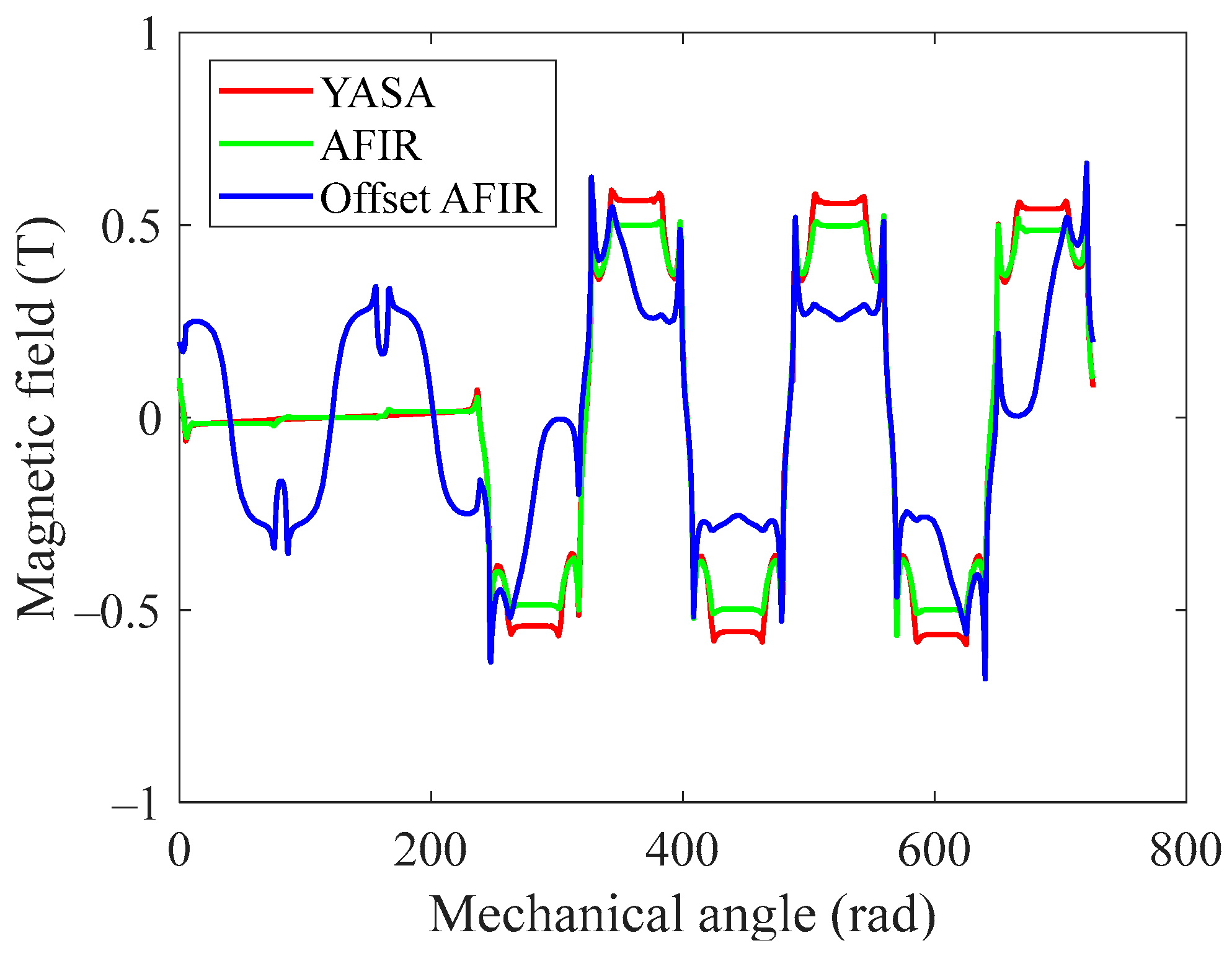
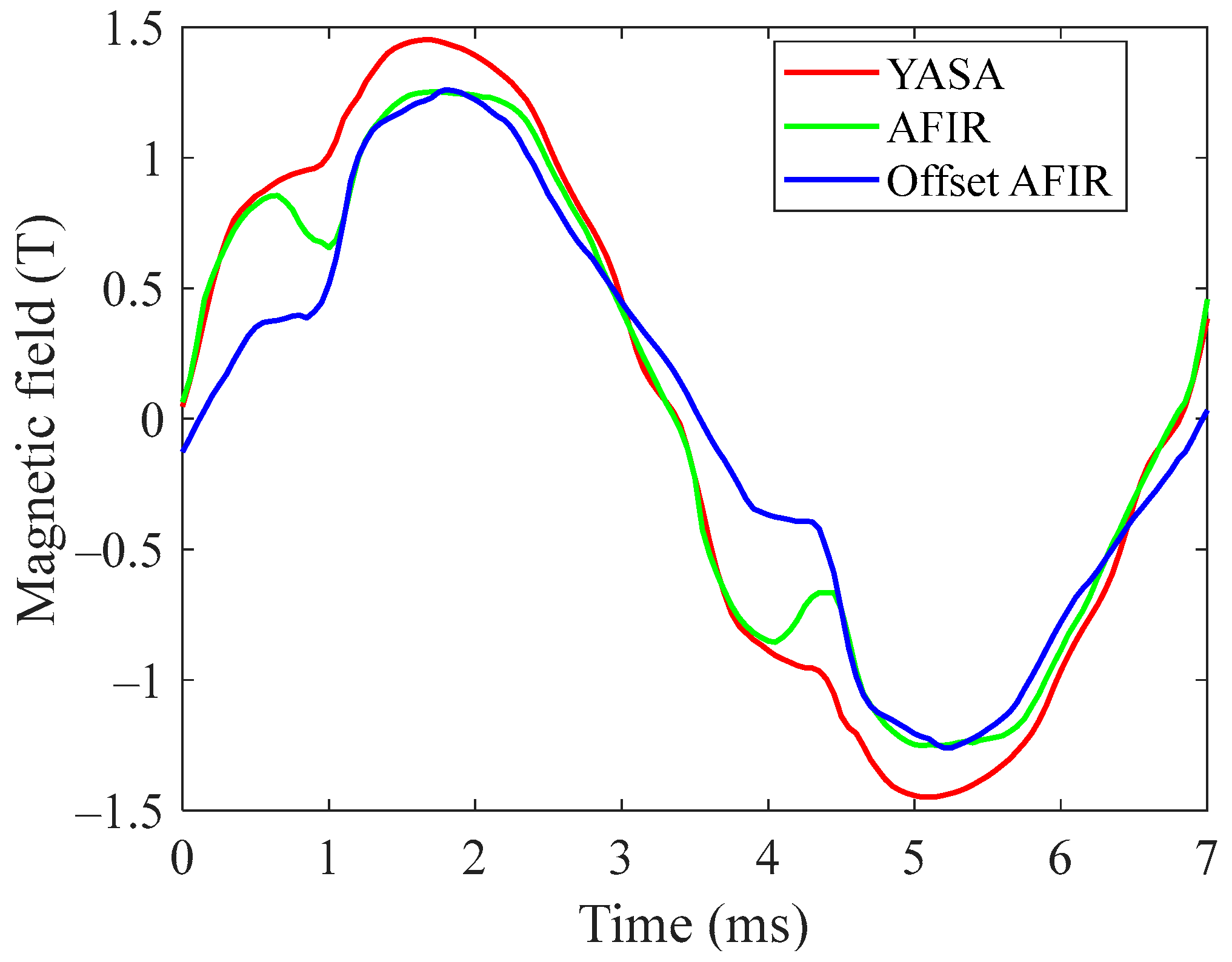
To facilitate a comprehensive comparison among the three topologies, a typical operating condition is selected with a motor speed of 2200 rpm and a current of 200 Arms. In this specific operating scenario, the armature field at time zero seconds in the airgap for all three topologies is depicted in
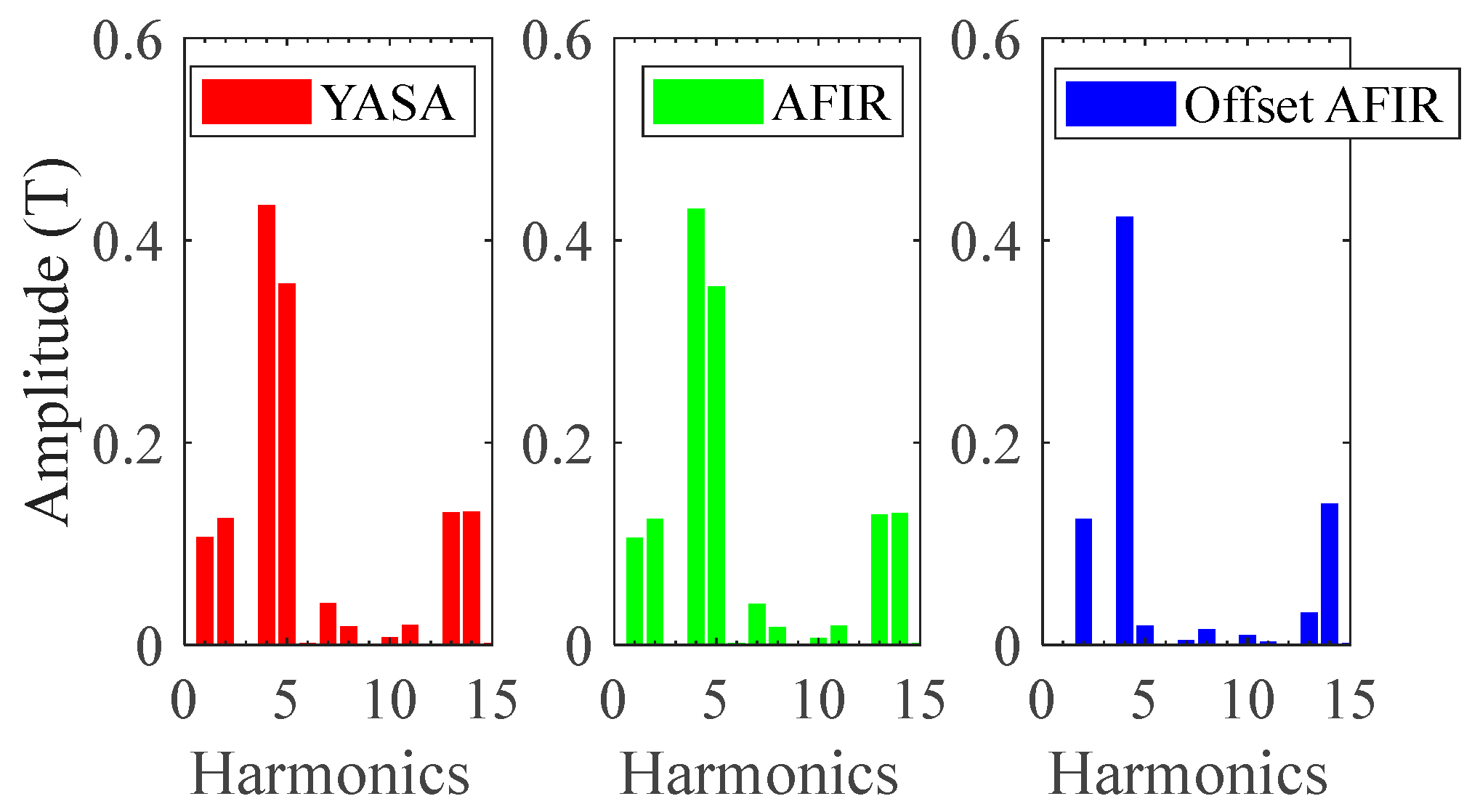
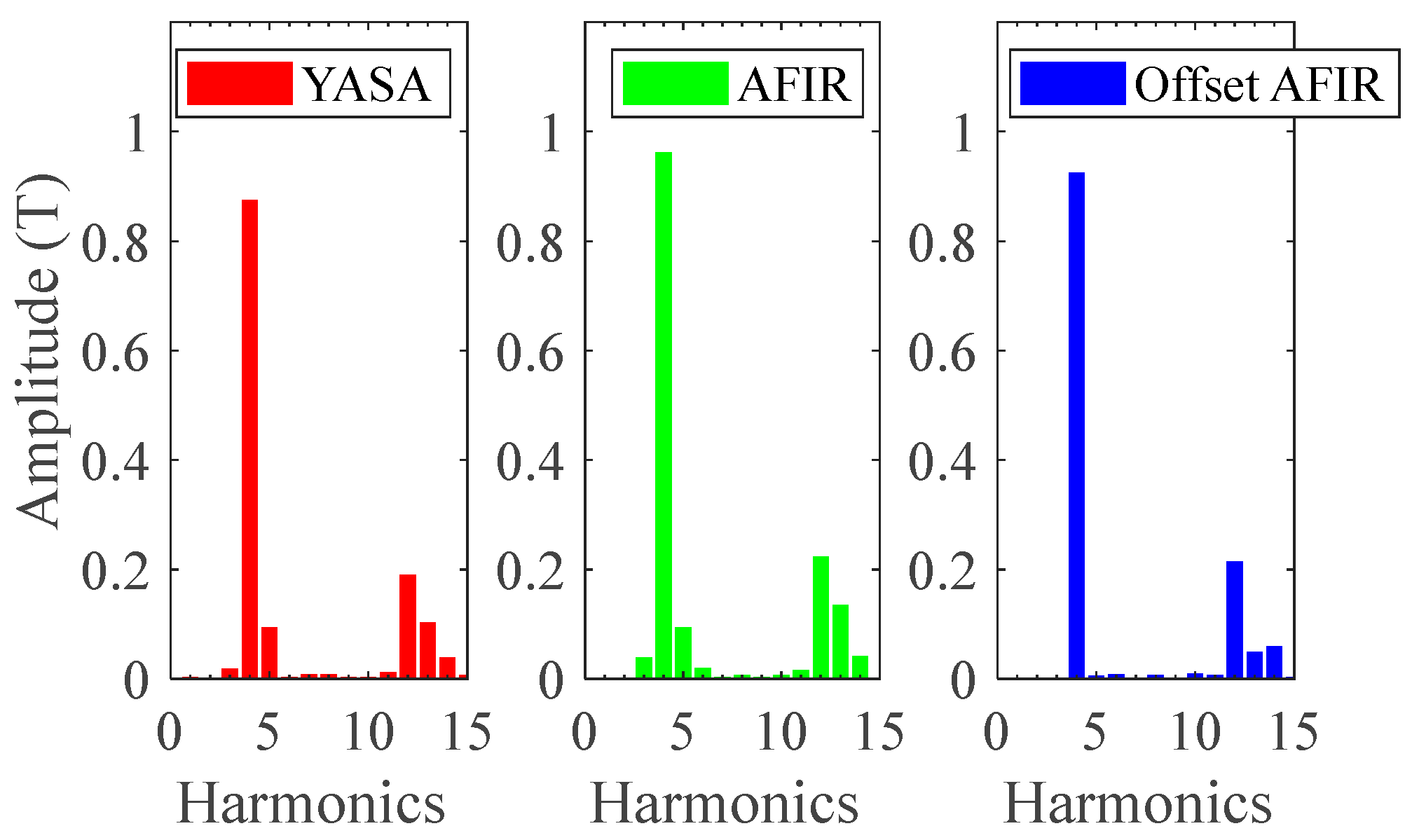
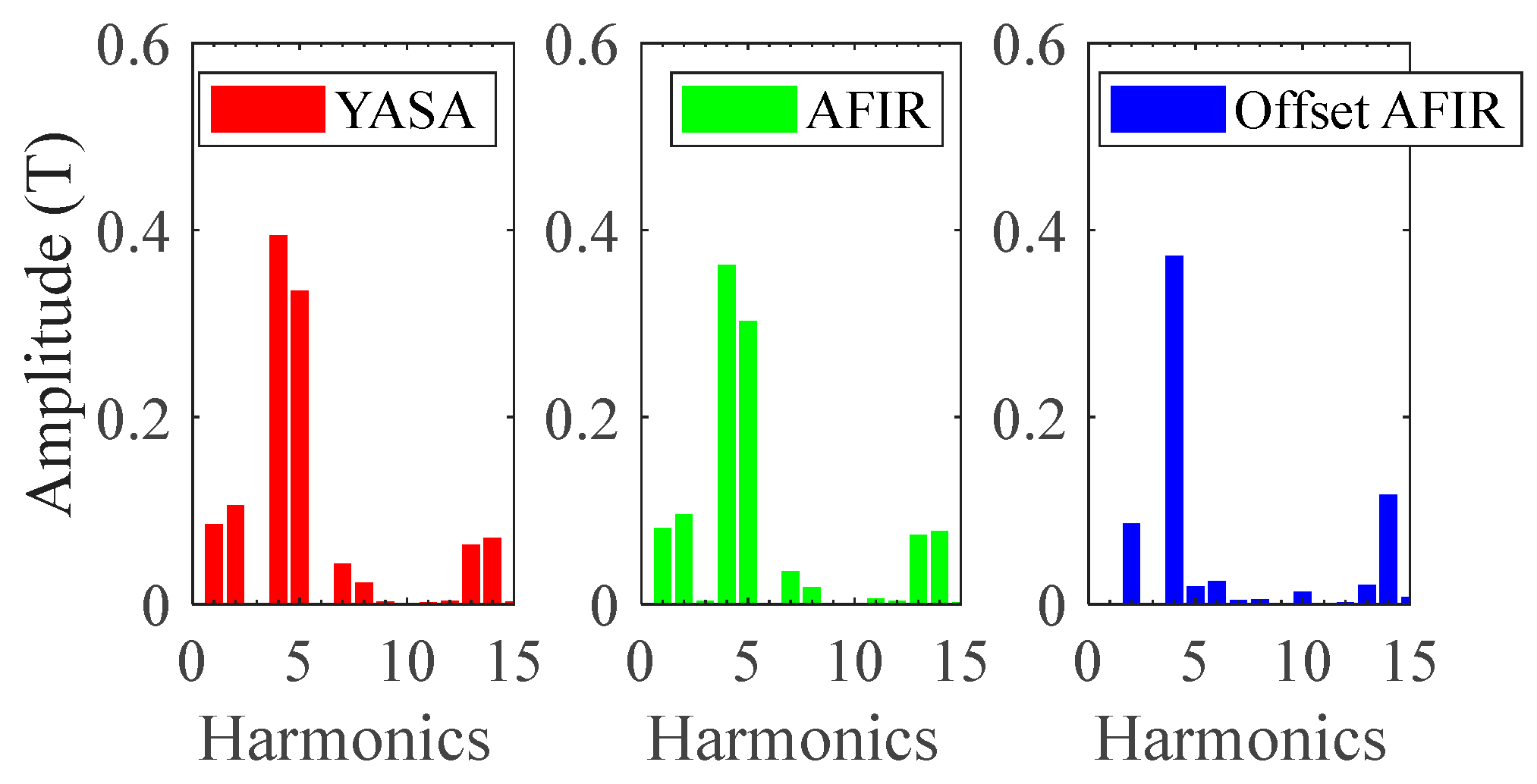
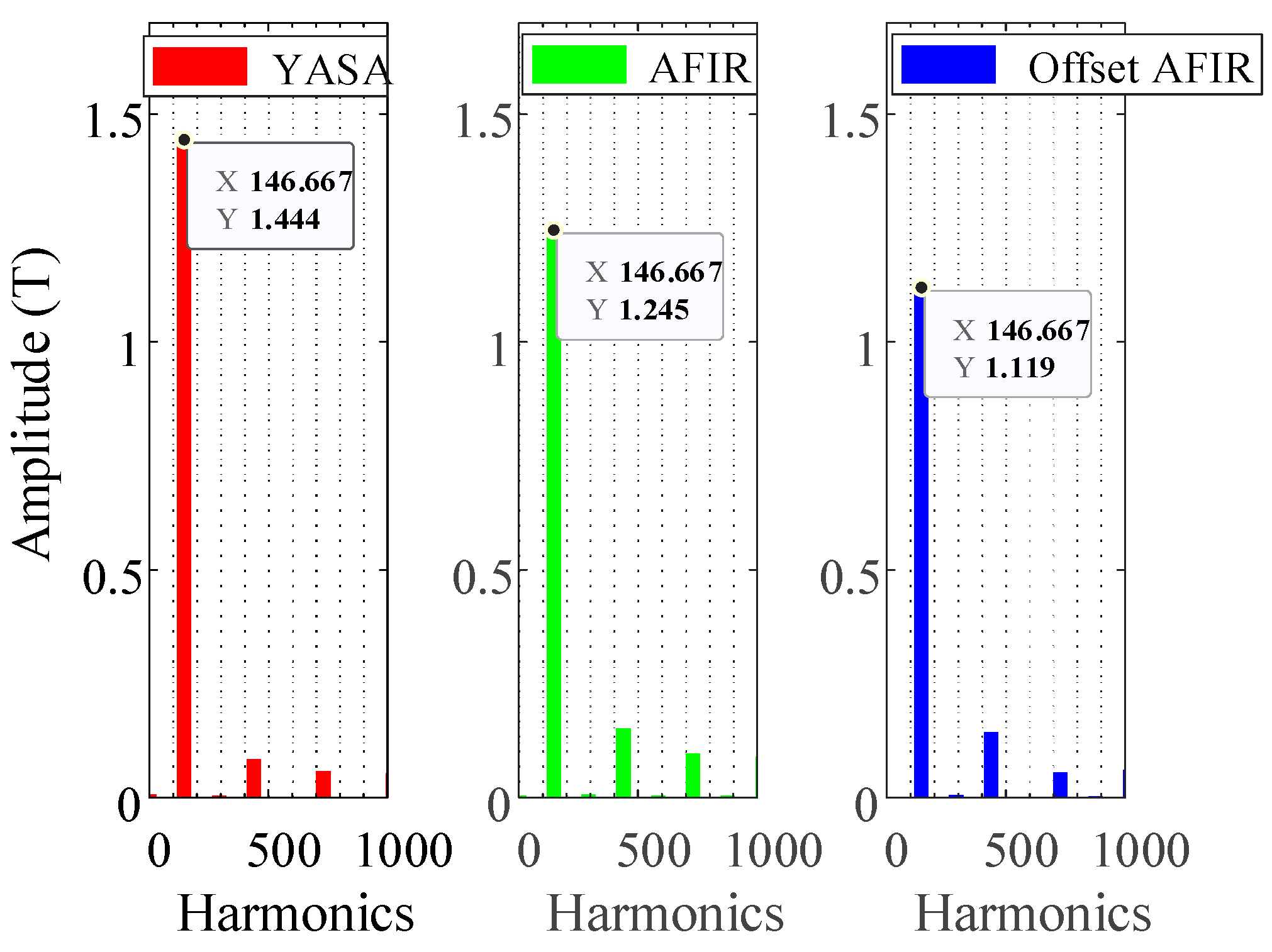
Figure 14. It is notable that the armature field generated by the YASA topology exhibits the highest peak value. An interesting phenomenon can be observed that, due to the phase A winding current at this point being zero, the initial magnetic field of the YASA and AFIR topologies starts from zero, while the offset AFIR does not due to the offset employed. A more detailed insight is provided through the FFT analysis, as illustrated in
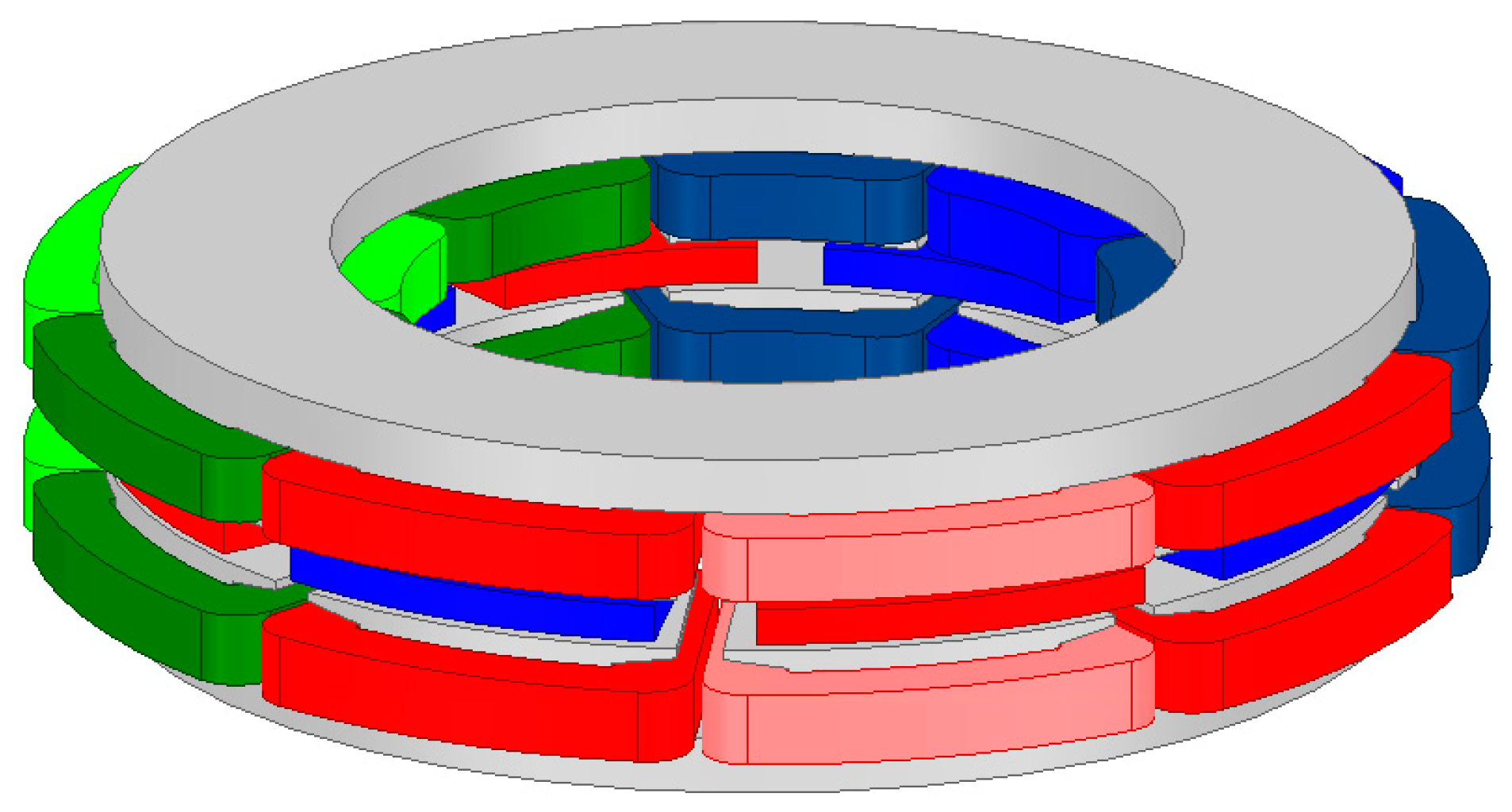
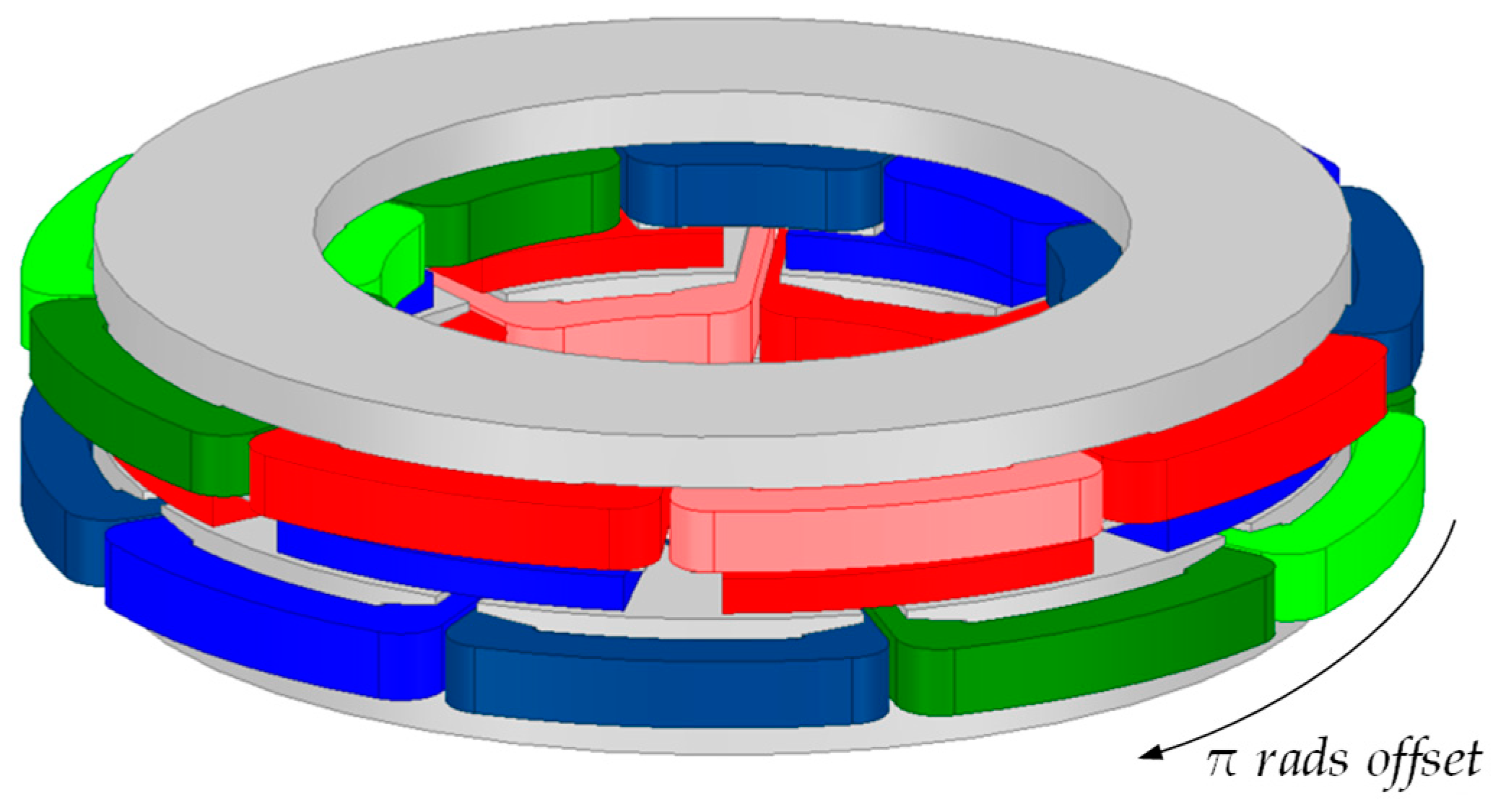
Figure 15. Due to the mechanical π rad offset, as shown in
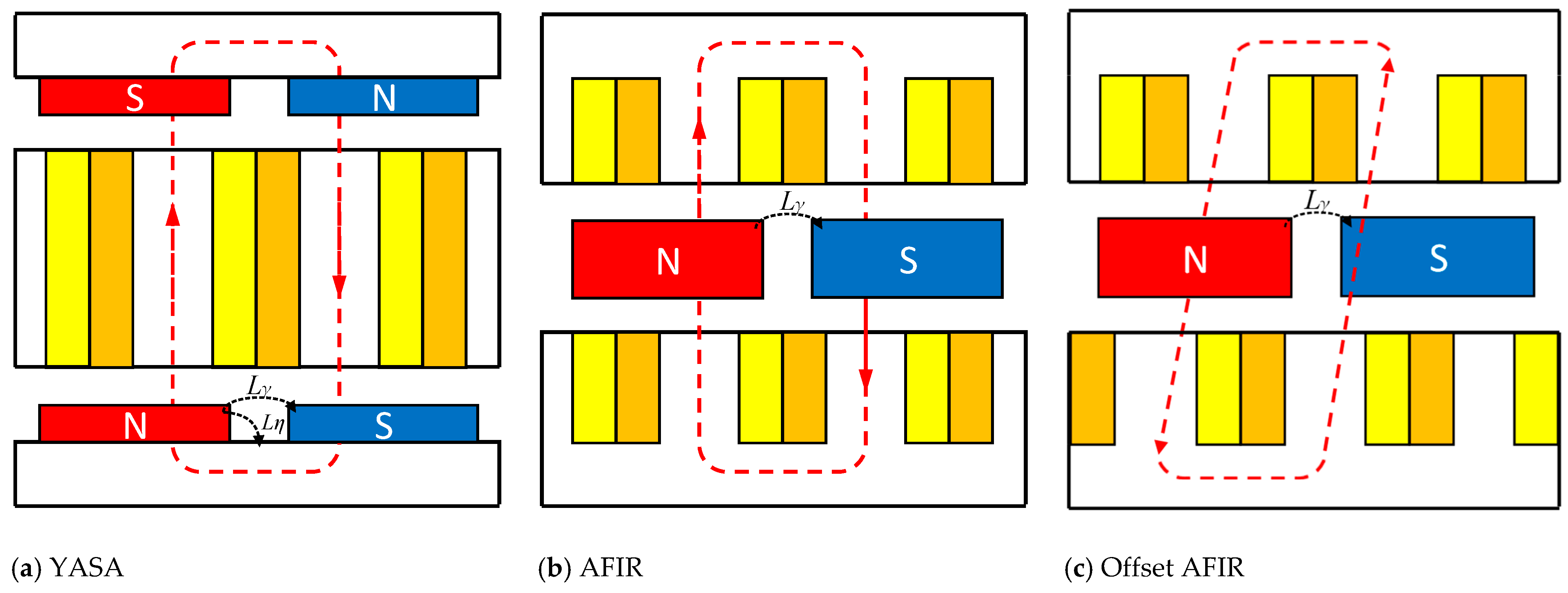
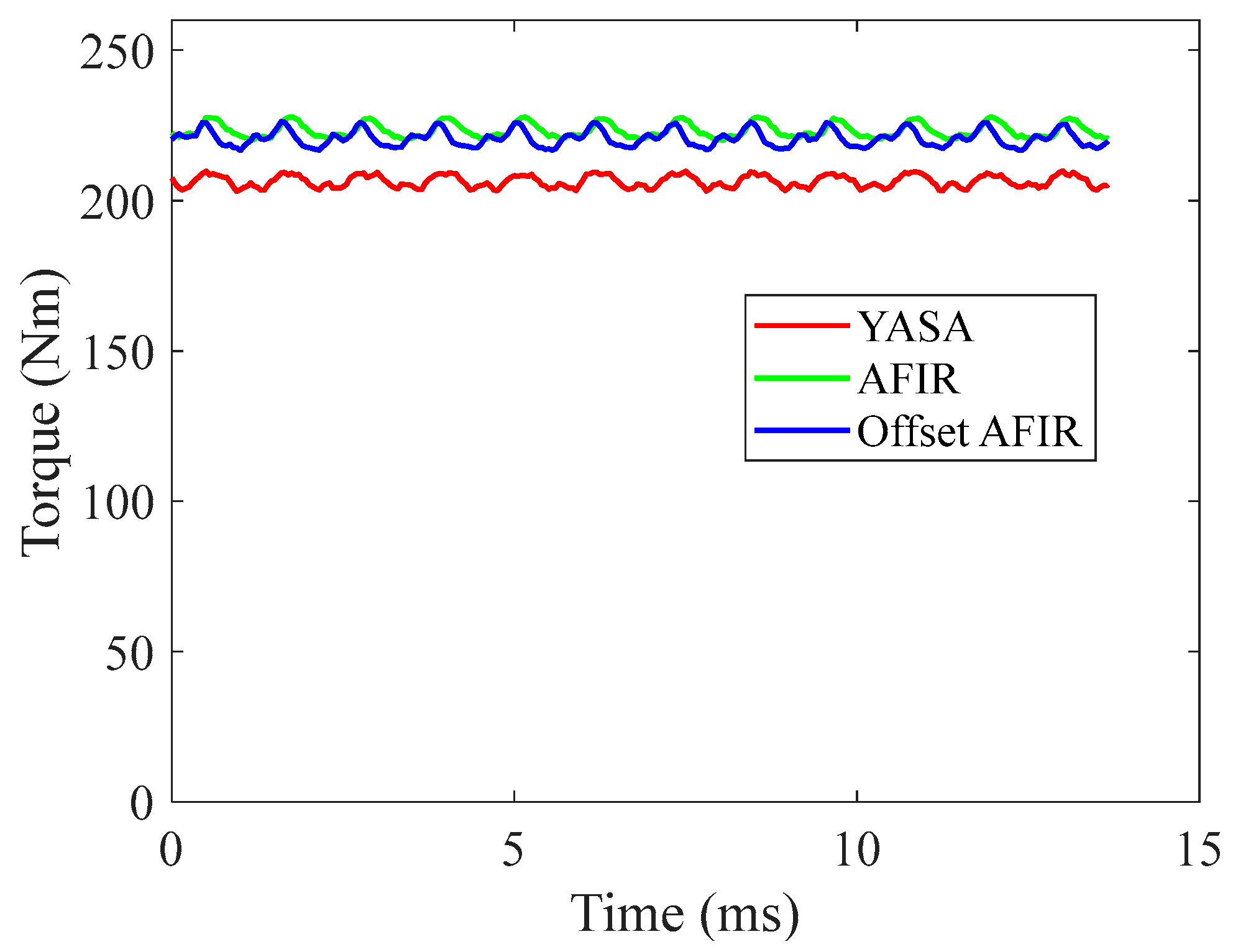
Figure 6, the spatial MMF distribution is more evenly distributed, so, at this instant, there is no zero-flux area along the circumference for the offset AFIR motor, while the YASA and the conventional AFIR motor have zero-flux areas along the circumference. Compared to the fourth harmonic from the YASA topology armature (0.394 T), the AFIR topology armature is reduced by 8.122% (0.362 T) while producing a higher torque. Similarly, the fourth harmonic of the armature field in the offset AFIR topology is reduced by 5.584% (0.372 T) but with a higher torque produced. Furthermore, the offset AFIR topology effectively cancels the fifth harmonic to almost zero. The torque magnitude effectively reflects the varying amplitudes of the fundamental magnetic field, as shown in
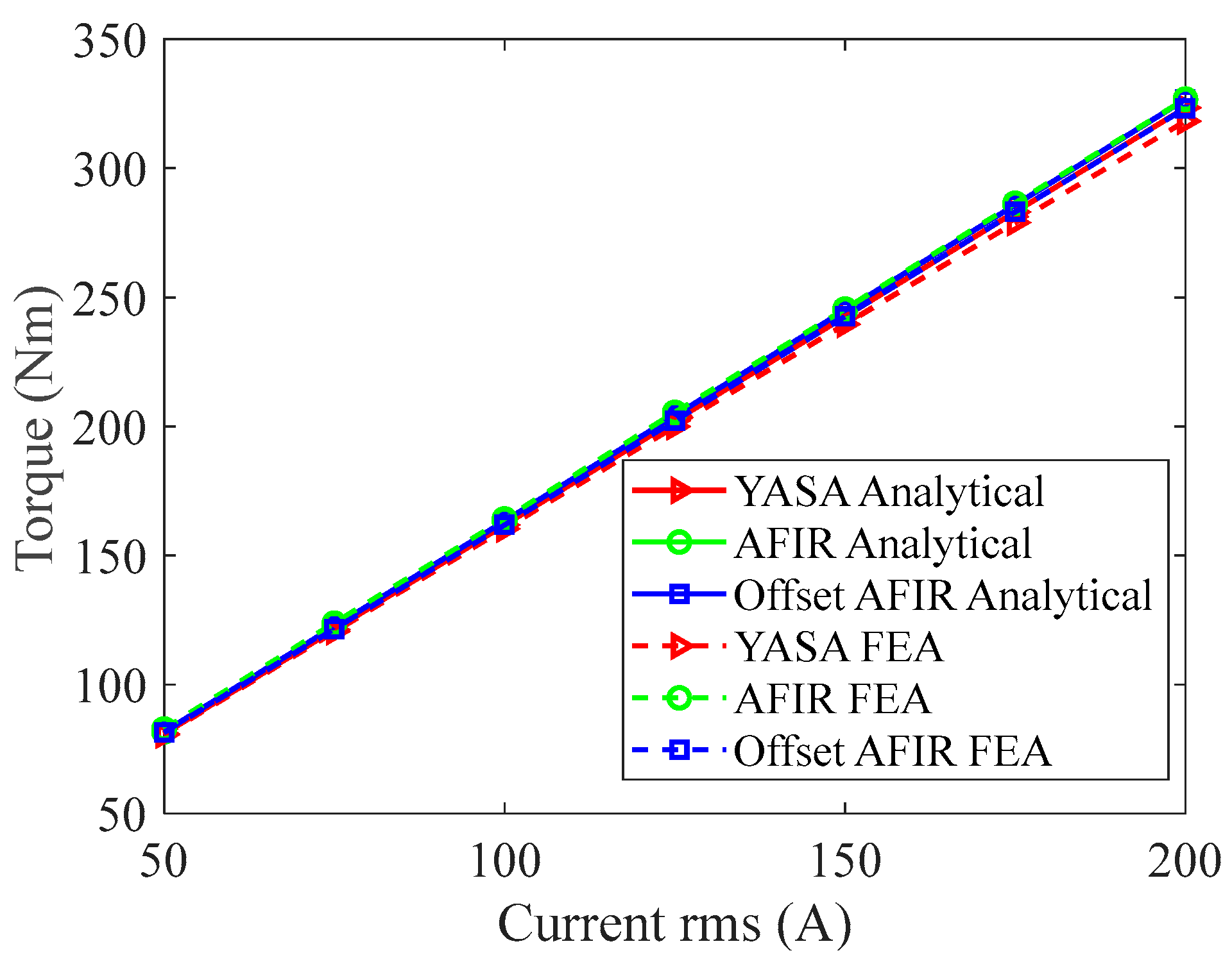
Figure 16, which proves that the torque produced is hardly affected by the offset applied. Both AFIR and offset AFIR topologies produce 220 Nm, which is around 7% higher than the YASA topology. However, with the YASA and AFIR topologies having a similar torque ripple (6.8 Nm and 7.8 Nm, respectively), the torque ripple in the offset AFIR topology is increased to 9.68 Nm due to teeth misalignment.
The combination of PM field and armature field results in the flux density in the iron cores depicted in
Figure 17. The results are from a fixed point located at the center of a tooth. A detailed illustration of the tooth flux density through the FFT analysis, as presented in
Figure 18, highlights that the YASA topology has the highest amplitude for its fundamental harmonic, reaching 1.444 T. Compared with the YASA topology, the AFIR topology achieves a 15.98% reduction, and the offset AFIR topology has a 22.50% reduction under identical operational conditions. These observations suggest that the YASA topology suffers from more severe saturation issues in comparison to the AFIR topology when operating at the same condition. Moreover, the offset AFIR topology exhibits the lowest saturation levels while maintaining torque production.
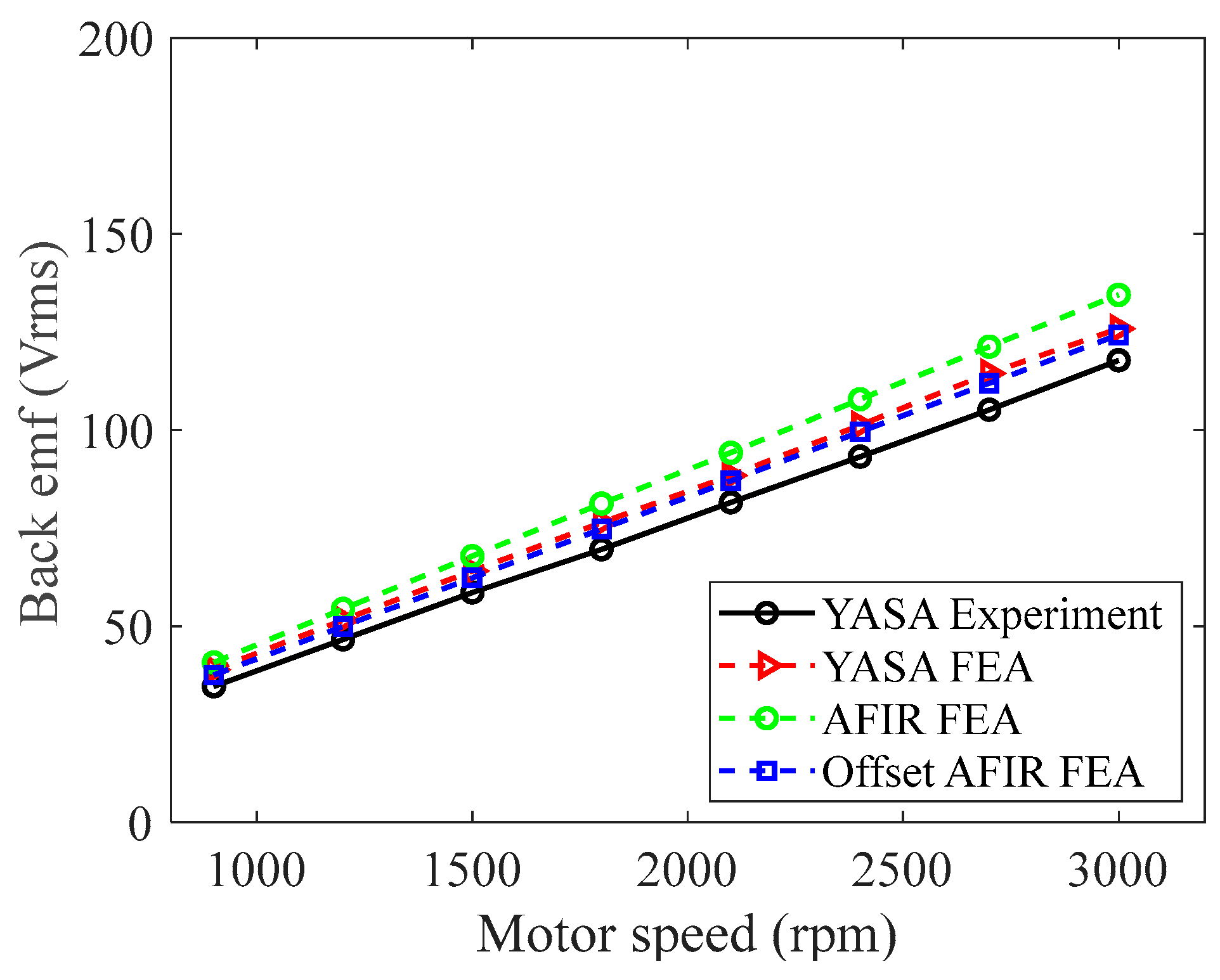
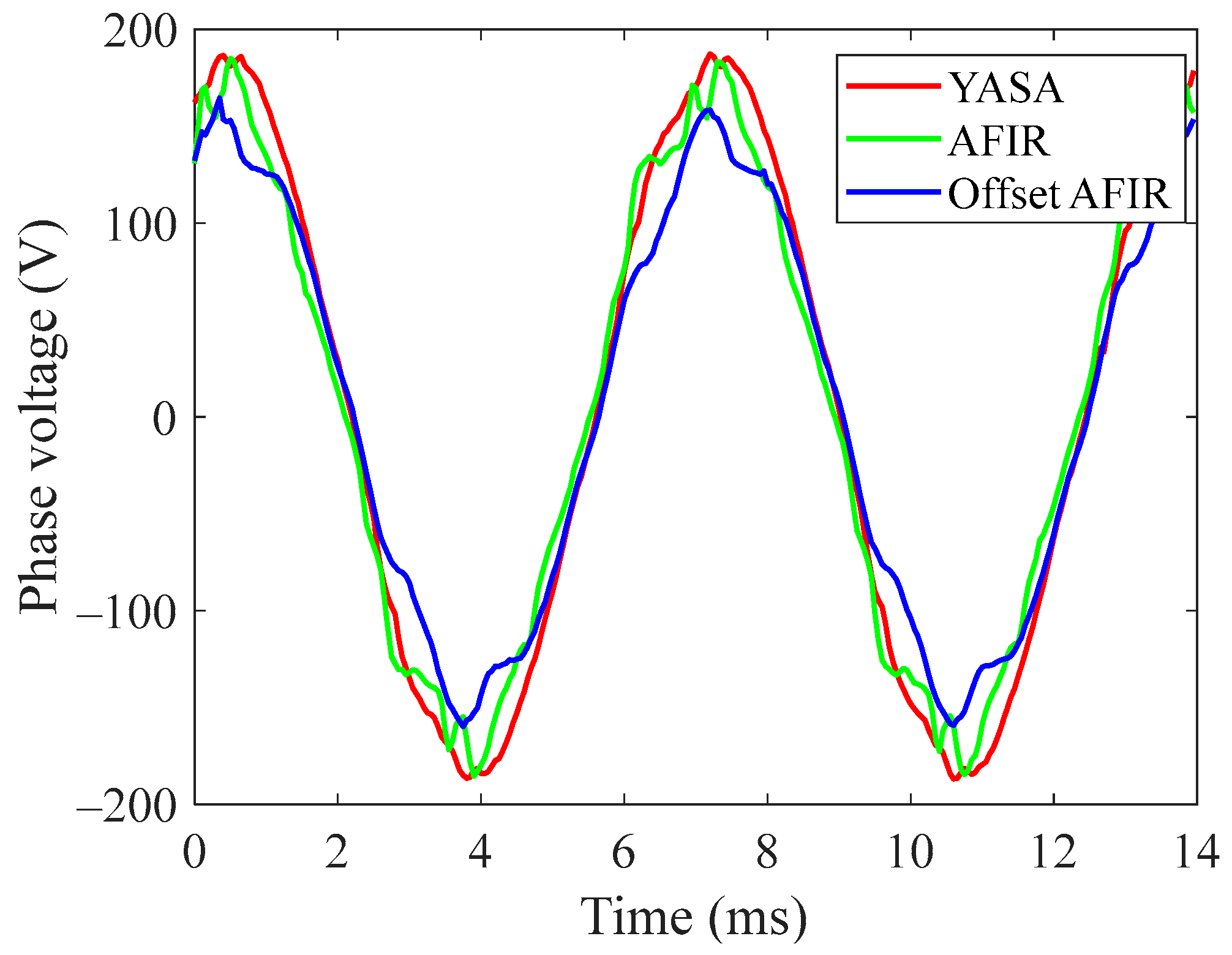
The magnitude of phase voltage presented in
Figure 19 aligns with the magnitude of flux density in the teeth, as illustrated in
Figure 17. The YASA topology exhibits the highest phase voltage, measuring 129.62 Vrms, due to the highest flux density in the teeth. In contrast, the offset AFIR topology records the lowest phase voltage at 103.74 Vrms, representing a 19.97% reduction. This indicates that the offset AFIR topology can operate under the same load conditions with a higher power factor, which can prove beneficial in terms of converter design and battery specifications, ultimately contributing to cost reduction.
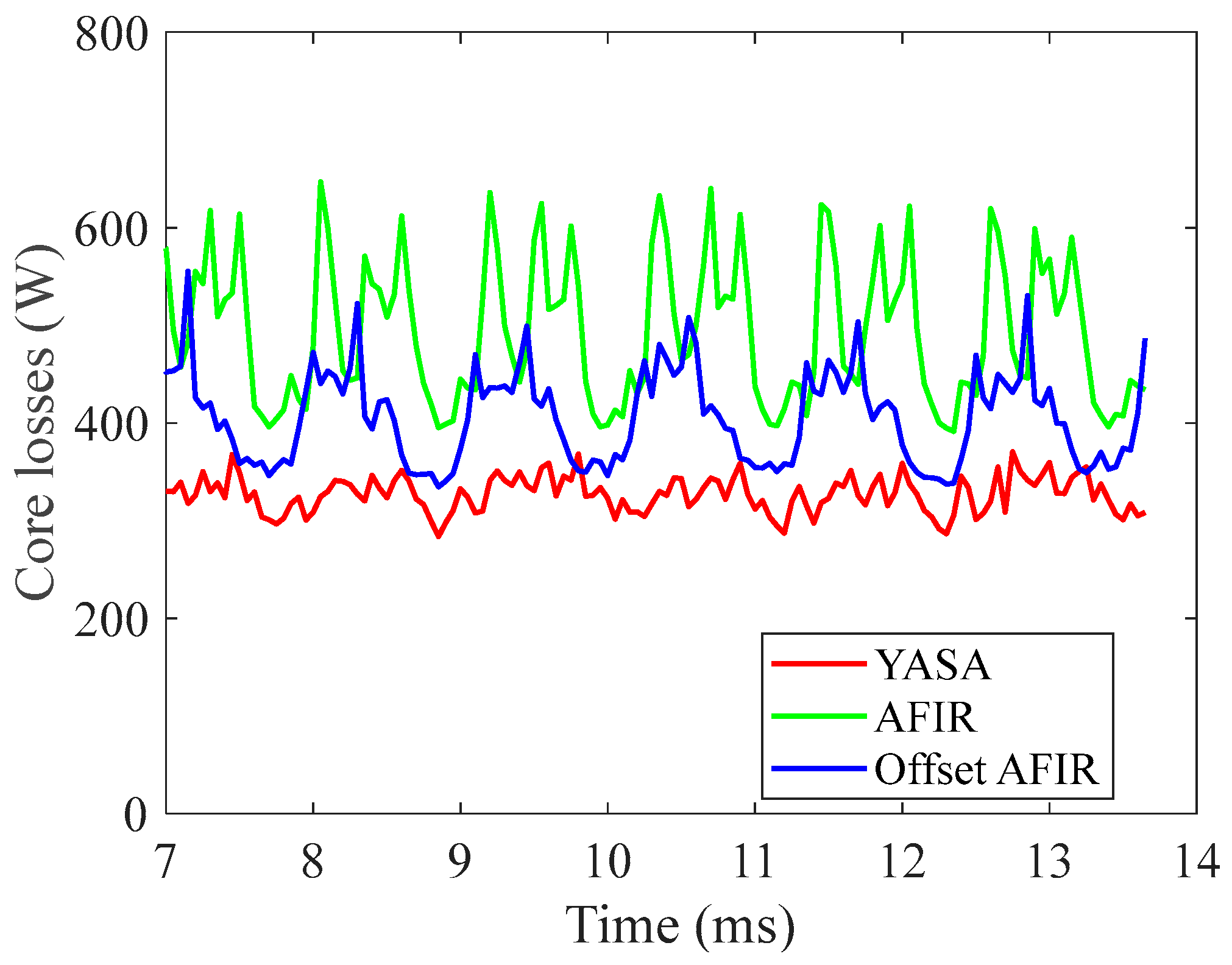
Figure 20 illustrates another crucial aspect of this comparison, including core losses and PM eddy current losses. A detailed explanation of the findings can be derived from the investigation of potential fields contributing to loss production for these three topologies, as presented in
Table 5,
Table 6 and
Table 7. For the YASA topology, the back-iron rotates synchronously with the rotor, eliminating the relative movement between the back-iron and the eight-pole field generated by both PMs and armature windings. Consequently, the eight-pole fields introduce almost no losses in the back-iron. In contrast, the AFIR topology has stationary back-iron on the stator; therefore, the eight-pole fields from PMs and armature windings result in 33.60% higher core losses from 326.95 W to 492.46 W compared to the YASA topology.
The offset AFIR topology cancels the ten-pole field, reducing core losses by 17.78% from 492.46 W to 404.87 W when compared to the AFIR topology. It is worth mentioning that even with harmonic cancellation, the core losses of the offset AFIR topology are still higher than those of the YASA topology, which shows one of the advantages of the YASA topology.
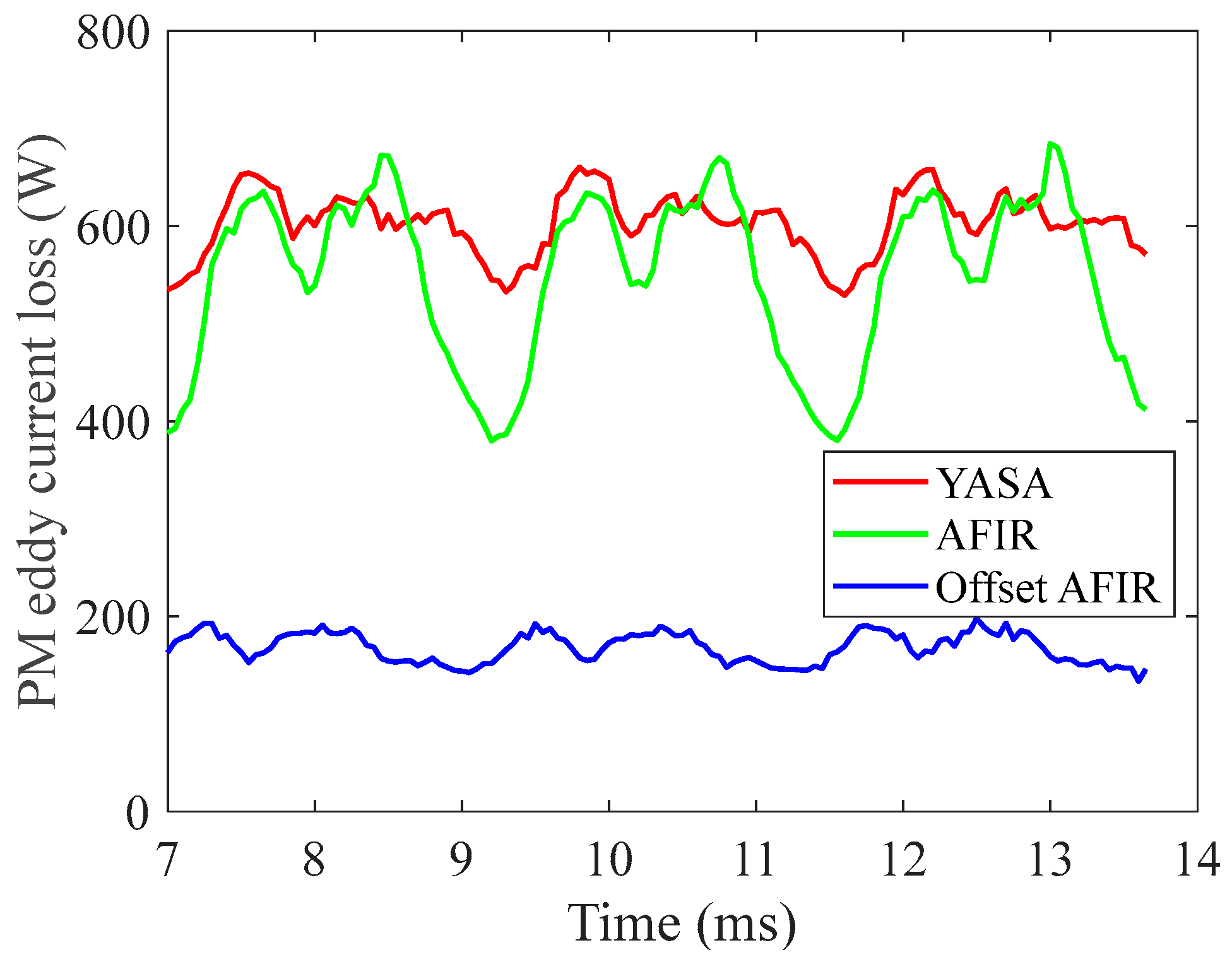
Regarding PM eddy current losses, as shown in
Figure 21, the YASA topology and the AFIR topology achieve similar PM losses with values of 603.49 W and 549.14 W, respectively. The offset AFIR topology achieves a significantly lower PM eddy current loss of only 168.02 W, marking a significant reduction of 72.16% compared to YASA and 69.41% in relation to AFIR. This difference stems from the fact that the offset topology eliminates the ten-pole field generated by the armature, reducing loss in the PMs.
These findings imply that the adoption of the offset topology can effectively reduce PM losses, subsequently reducing the demands on the cooling system while maintaining consistent output power levels. This facilitates cooling system designs and holds the potential to reduce the overall footprint, thereby enhancing power density.
Table 8 summarizes the magnetic performance of the YASA, AFIR, and offset AFIR topologies. Under identical physical dimensions and operating conditions of a current load of 200 Arms at 2200 rpm, the YASA topology delivers 206.37 Nm of torque, while the AFIR and the offset AFIR achieve an approximately 8% increase in torque. Furthermore, due to increased flux density in the core, the YASA topology exhibits the highest maximum phase voltage. The AFIR topology achieves an 8.39% reduction in phase voltage and a 12.63% reduction achieved through harmonic cancellation in the offset AFIR topology. The harmonic cancellation leads to the power factor being improved by 13.69% in the offset AFIR topology compared to the YASA and AFIR topologies. However, due to the unique feature where both back-iron regions rotate with the magnets, the YASA topology achieves the lowest core losses among the three topologies. With the application of the offset technique, the offset AFIR topology shows a reduction in core losses.
Examining PM losses, both the YASA and AFIR topologies suffer substantial PM eddy current losses, while the offset AFIR topology achieves a remarkable 70% reduction in PM losses. This achievement is noteworthy, considering the challenges of dissipating heat from rotating components.
Despite having lower core losses, the YASA topology’s reduced torque production results in an efficiency of 95.37%. The AFIR topology, with slightly higher output power but significant core losses, achieves a similar efficiency of 95.51%. Notably, the offset AFIR topology achieves the highest efficiency of 96.30% due to harmonic cancellation while maintaining output power.
In conclusion, the selection of the optimal topology depends on the specific requirements for applications. For instance, when high torque density is preferred, the AFIR topology is the preferred choice. Alternatively, if cost-effective iron core materials and reduced core losses are the objectives, the YASA topology provides advantages. When higher efficiency is the target, the offset AFIR topology emerges as the preferred option. Moreover, the offset AFIR topology brings additional advantages, such as lower phase voltage and reduced overall losses, potentially leading to cost savings in DC bus and cooling system designs. The offset AFIR configuration may attract considerable attention due to the additional benefits it brings.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}