
Sigma Delta Modulation Controller and Associated Cybersecurity Issues with Battery Energy Storage Integrated with PV-Based Microgrid



Abstract
:
1. Introduction
- (i)
- This work develops a fast and sophisticated SDM controller for the optimal charging and discharging of a BESS to maintain constant load power and load voltage despite the intermittent tendency of the grid-connected PV system;
- (ii)
- The proposed SDM controller has been designed for four PV-based microgrid systems;
- (iii)
- An improved ensemble-based method (SAMME AdaBoost) for cyberattack detection on the BESS controller has been developed.
2. Problem Statement
3. Description of Microgrid Systems Including PV
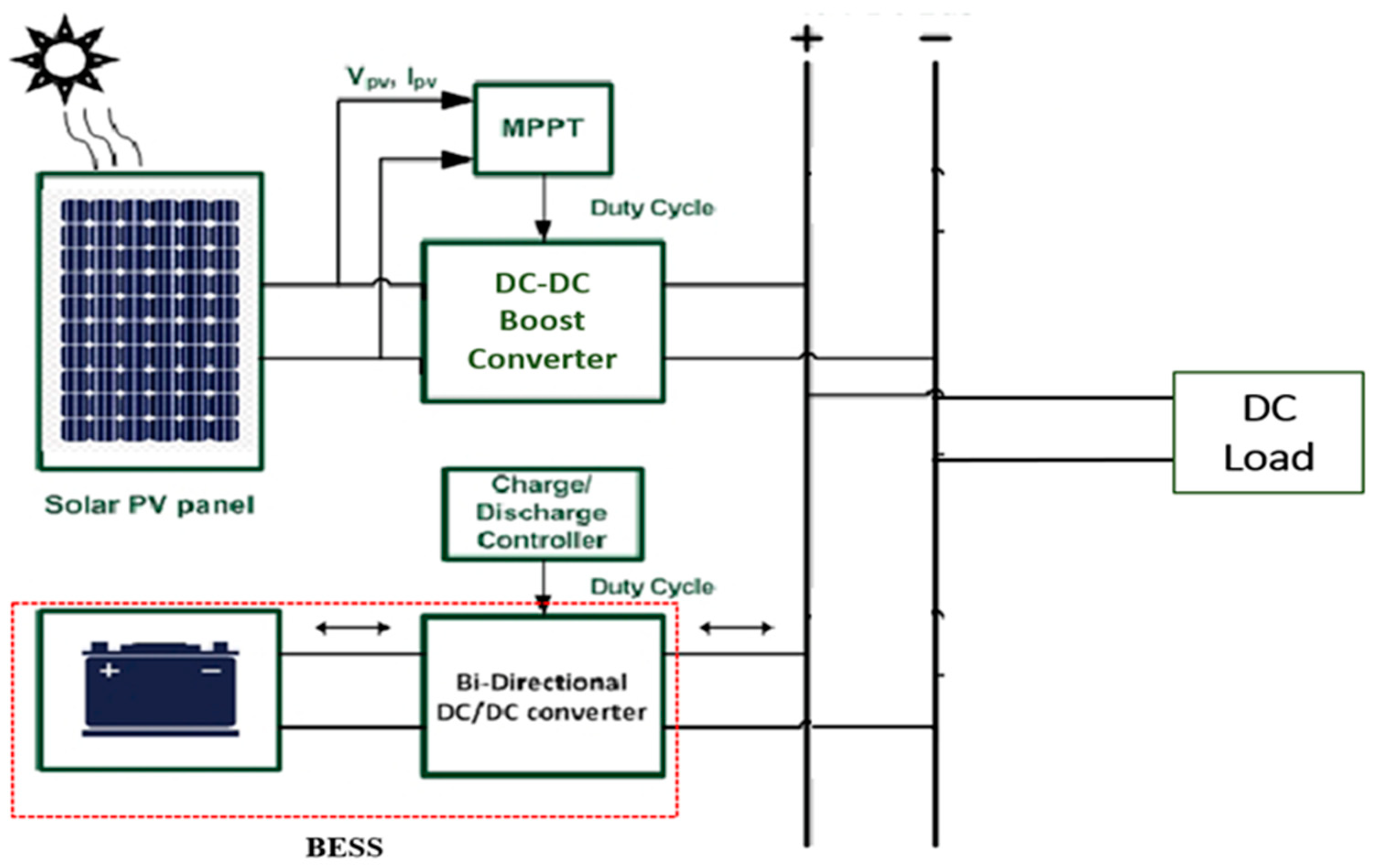
3.1. Solar DC Microgrid System
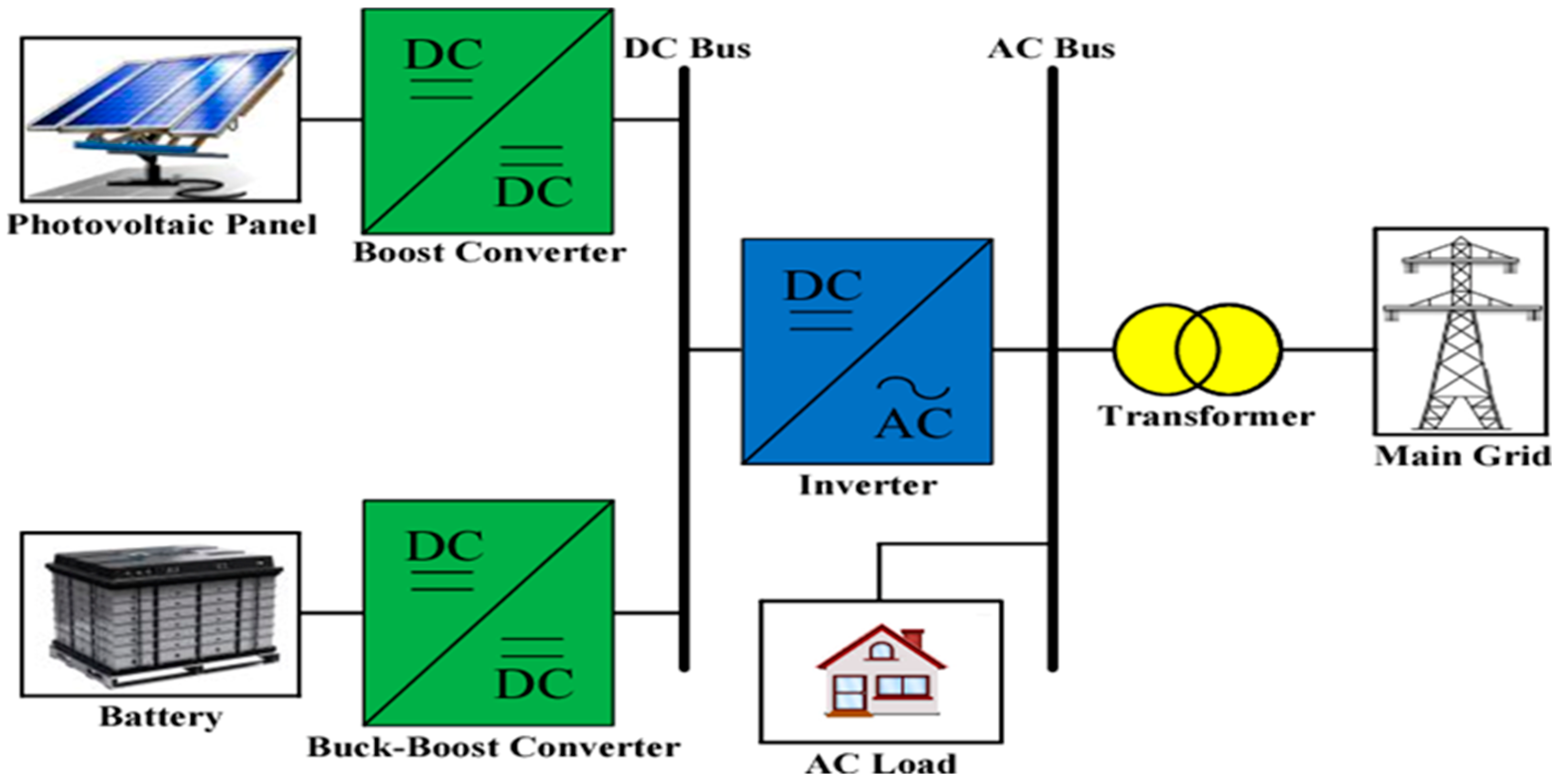
3.2. Grid-Connected Solar AC Microgrid System
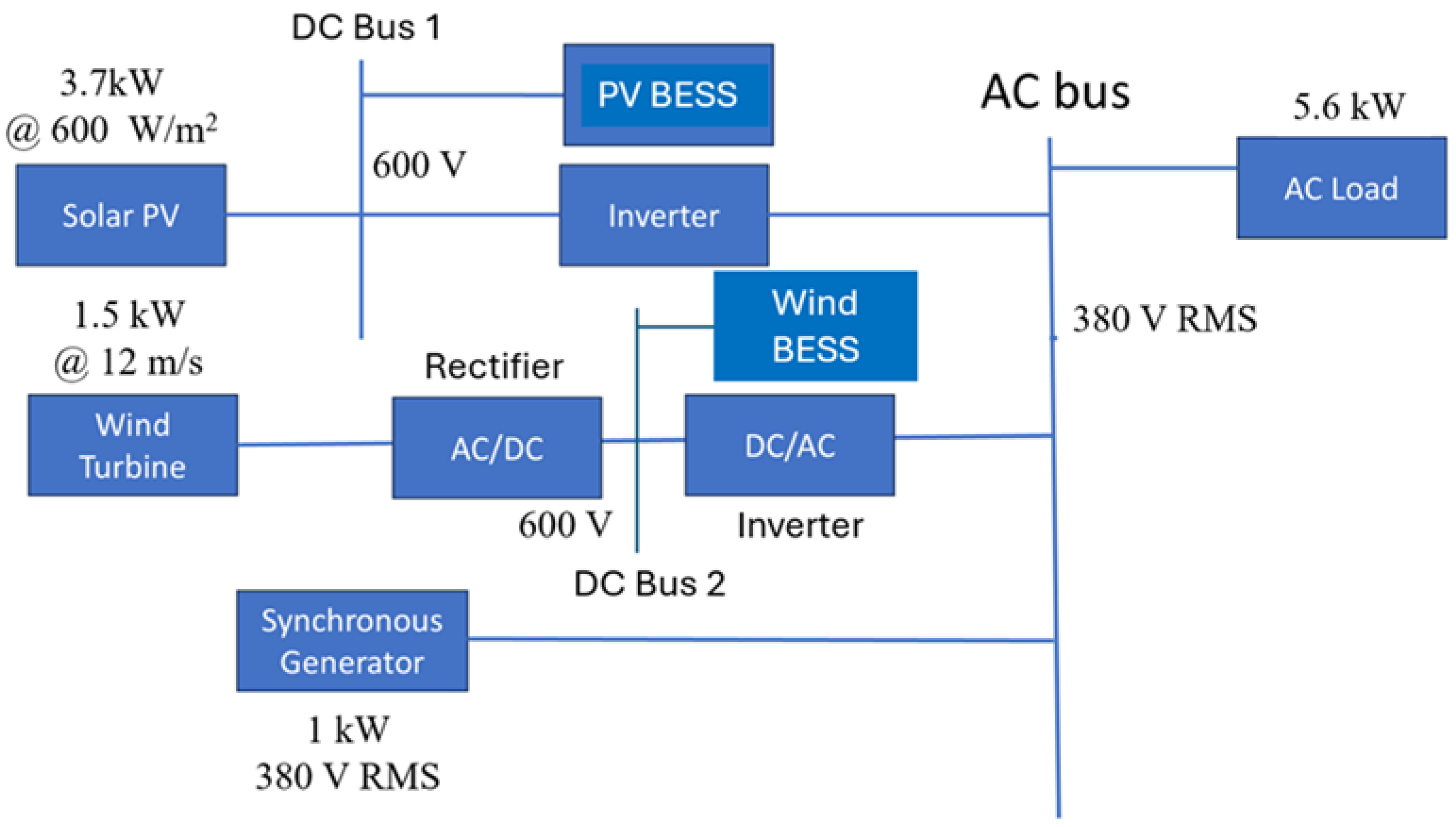
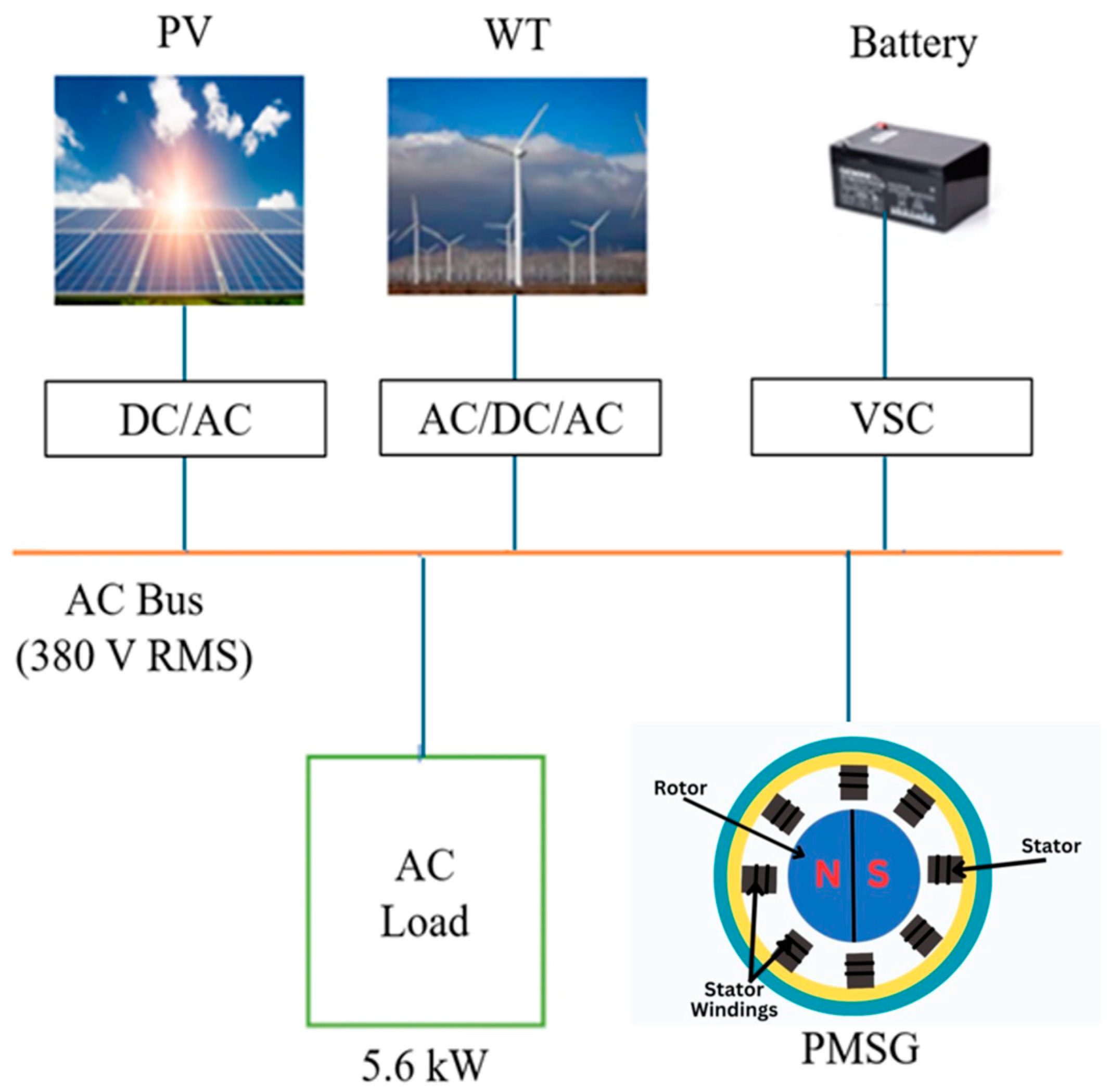
3.3. Hybrid AC Microgrid with a Single BESS
4. Proposed Sigma-Delta-Based Control Design for the BESS
- i.
- Error Detector
- Role: Measures the difference between the target (desired) voltage/current and the actual voltage/current from the battery.
- Function: Generates an error signal, guiding the control adjustments needed for the stable charging or discharging of the battery.
- ii.
- Integrator
- Role: Accumulates the error signal over time to create a smoother, slowly varying control signal.
- Function: Reduces noise sensitivity and smooths out fluctuations, ensuring the system responds based on overall trends rather than short-term disturbances.
- iii.
- Feedback Loop
- Role: Provides continuous feedback to the integrator and error detector, adjusting the control dynamically.
- Function: Helps maintain stability by enabling the controller to adapt to changes in load demand or the battery’s state of charge.
- iv.
- Comparator
- Role: Compares the integrated error signal to a reference level or threshold.
- Function: Produces three outputs (−1, 0, or 1) based on the comparison, which serves as the switching decision (ON/OFF) for the converter’s MOSFET (Metal Oxide Semiconductor Field Effect Transistor), thereby modulating the power flow.
- v.
- Quantizer
- Role: Converts the comparator’s analog input into a high-frequency digital pulse stream, as well as operates the sigma-delta controller at a high frequency, much higher than the converter’s switching frequency.
- Function: Defines the duty cycle in response to the integrator and comparator outputs, enabling precise high-frequency switching for optimal power regulation, as well as allows the oversampling of the input signal, enhancing control precision and responsiveness by providing finer adjustments in duty cycle.
- Sigma-Delta Controller Input–Output Parameter
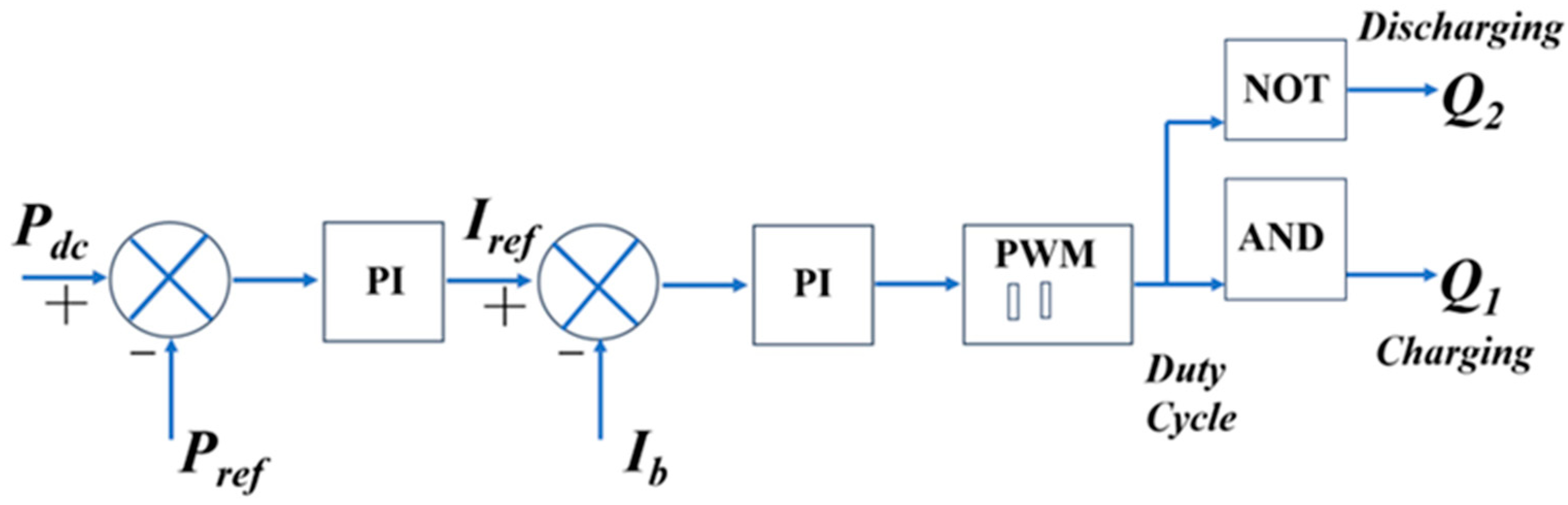
4.1. Two-Stage Proportional–Integral (PI) Controller
4.2. Fuzzy Logic Controller
- (i)
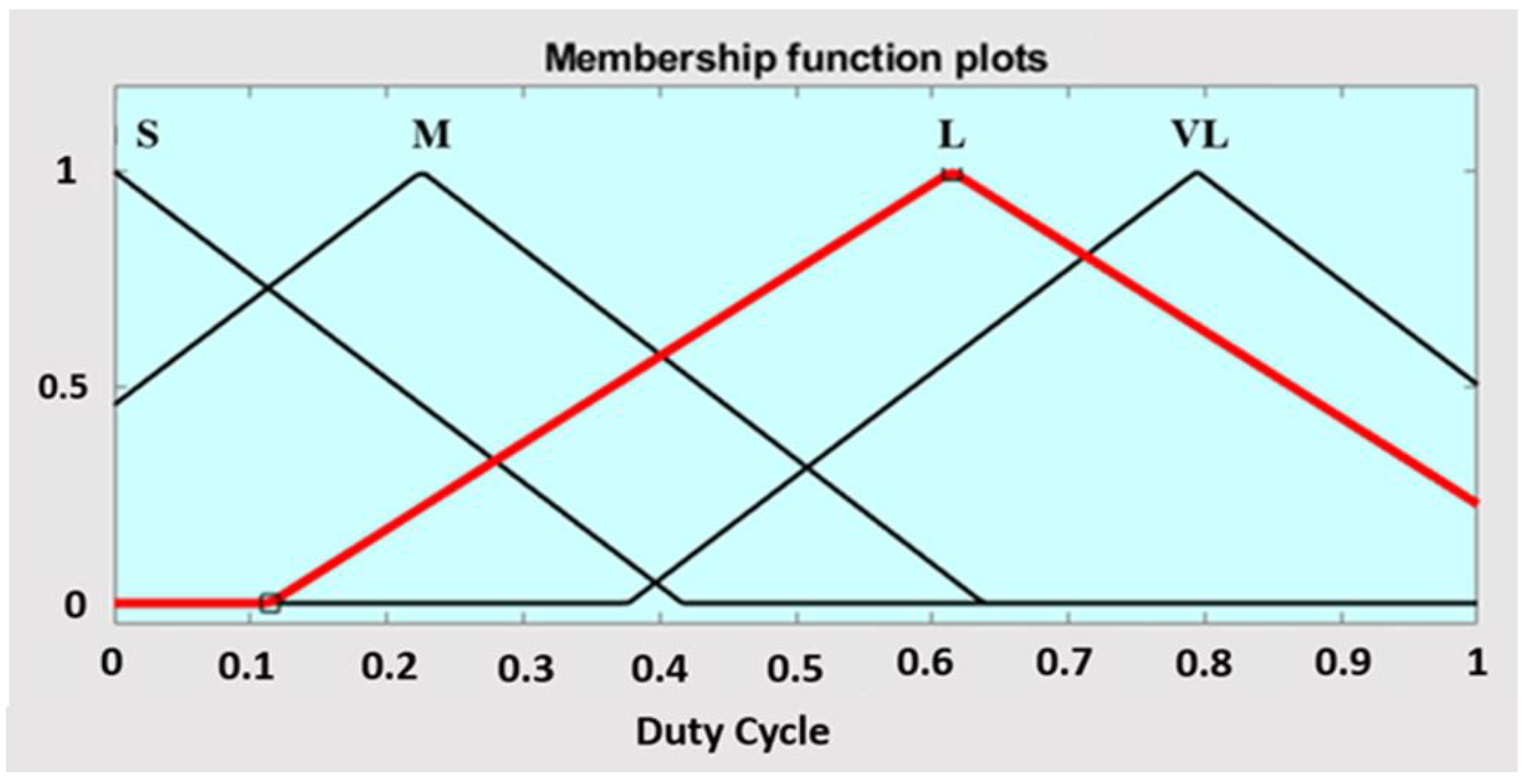
- Fuzzification: This process converts precise numerical input values into fuzzy sets. These fuzzy sets represent different levels of these variables. Triangular membership functions (MFs) illustrating linguistic NS (Negative Small), Z (Zero), PS (Positive Small), and PB (Positive Big) for the input (error in power, ΔP) are presented in Figure 14. Similarly, triangular membership functions illustrating variables S (Small), M (Medium), L (Large), and VL (Very Large) for the output (duty cycle, D) are presented in Figure 15. The equation employed for Triangular MFs in determining the grade of membership is as shown in (3) [36]:where the parameters {a, b, c} (where a < b < c) define the three x-coordinates corresponding to the vertices of the triangle.
- (ii)
- Rule Base: The fuzzy controller stands out for its simplicity, employing a single-input-single-output (SISO) variable design. This use of just one input and one output variable enhances its straightforward structure. The proposed control approach is defined by only five control rules, shown in Table 9, which map the input–output relationships for the controller.
- (iii)
- Fuzzy Inference and Defuzzification: For the inference mechanism of the fuzzy controller design, Mamdani’s method stands out as widely acknowledged in the literature. Additionally, the center-of-area method, a well-known and straightforward defuzzification technique [37] is employed to ascertain the crisp output value, D (duty cycle) by the following (4):where denotes the area of the region bounded by the curve C.
5. Simulation Results and Discussion
5.1. Performance of Different Controllers for Solar DC Microgrid System
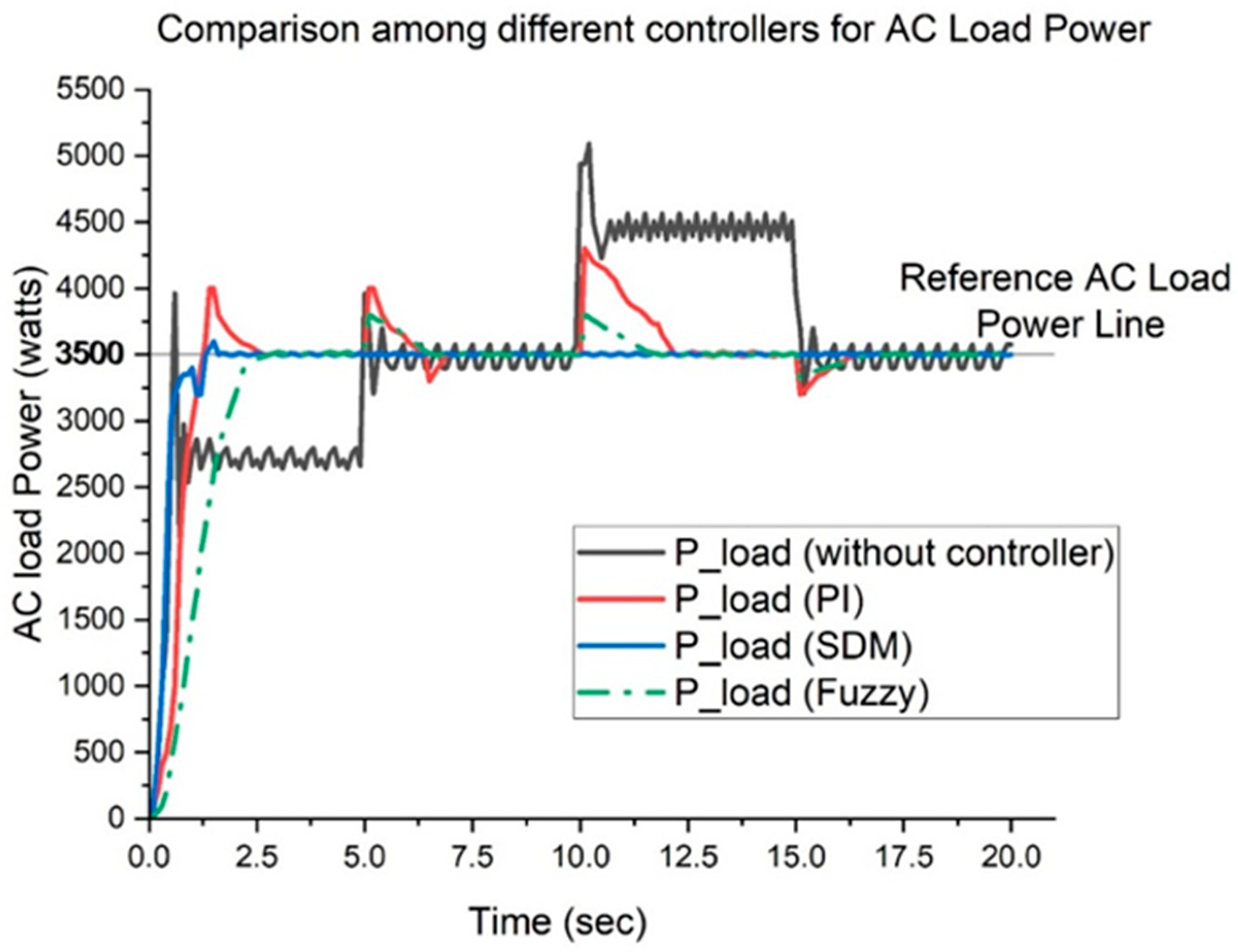
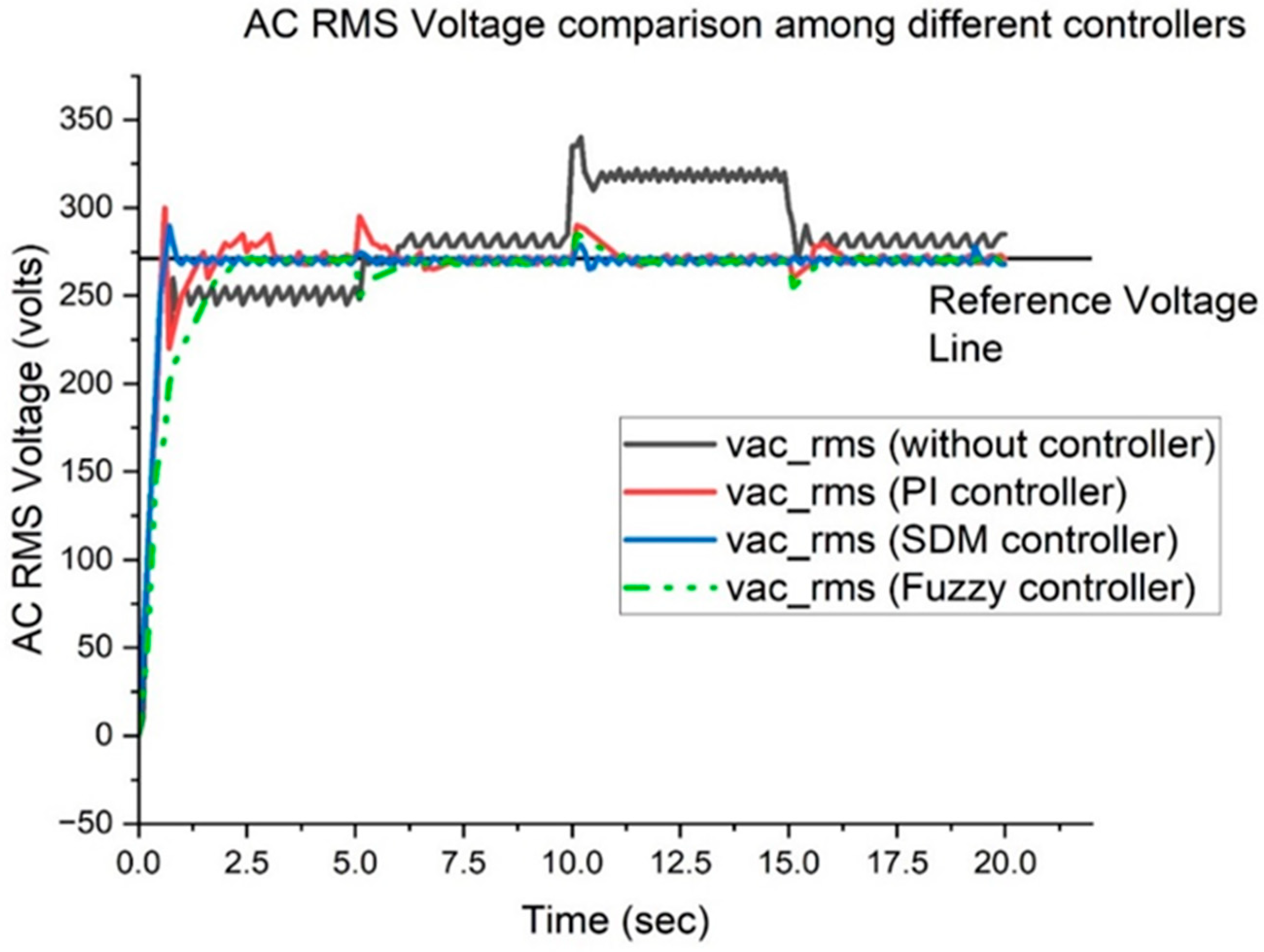
5.2. Performance of Different Controllers for Grid Connected Solar AC Microgrid
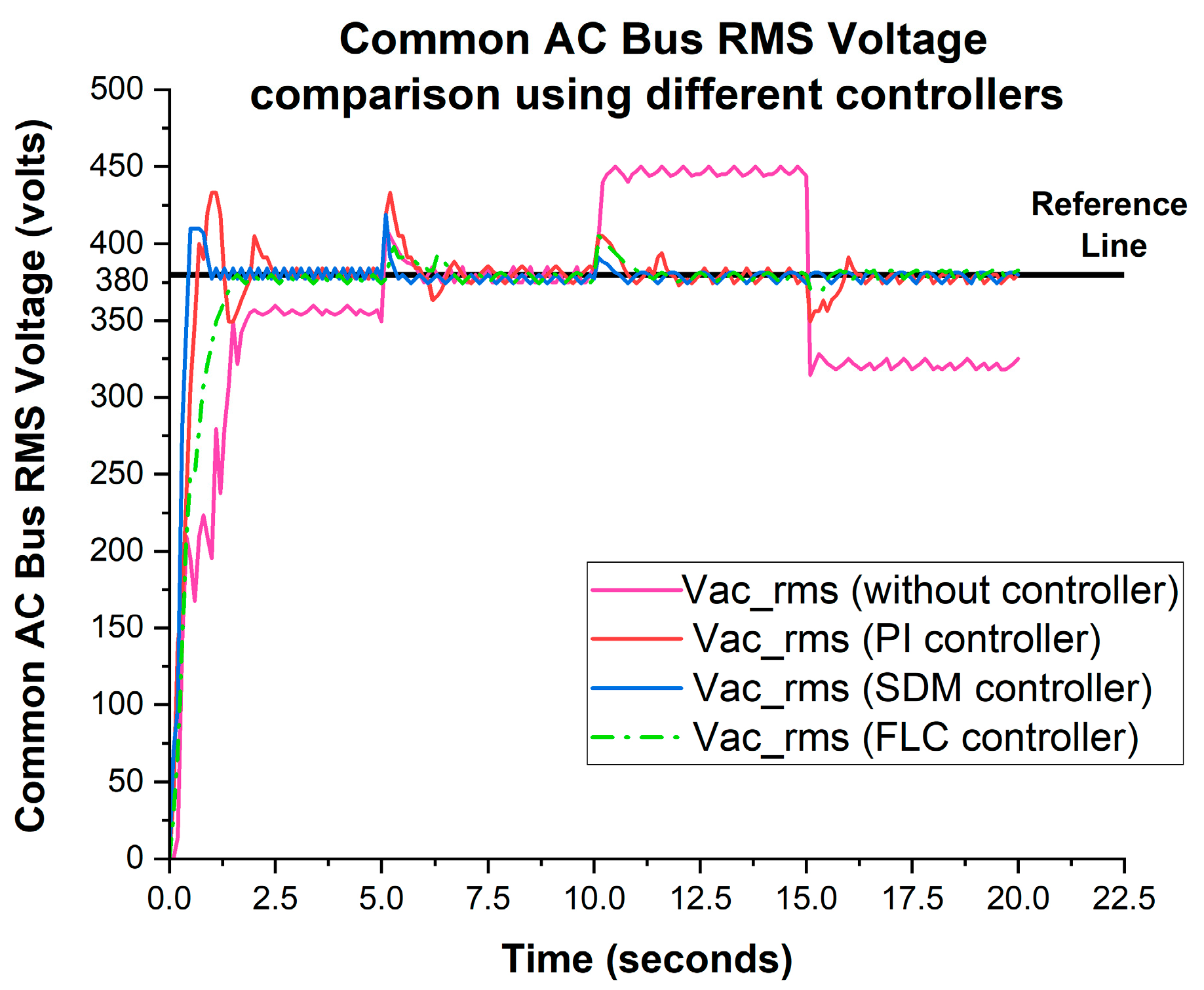
5.3. Performance of Different Controllers for Hybrid AC Microgrid with Two BESS
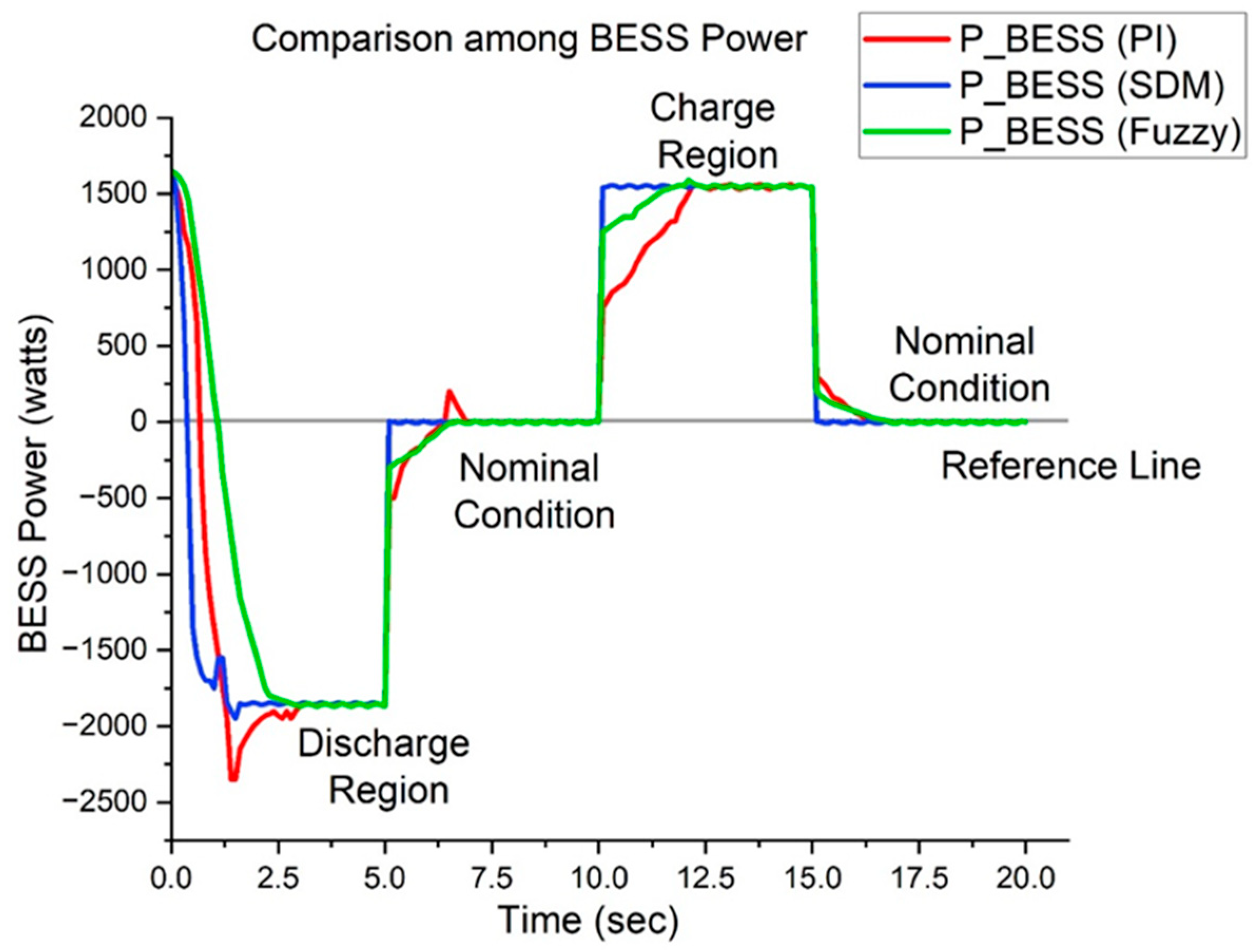
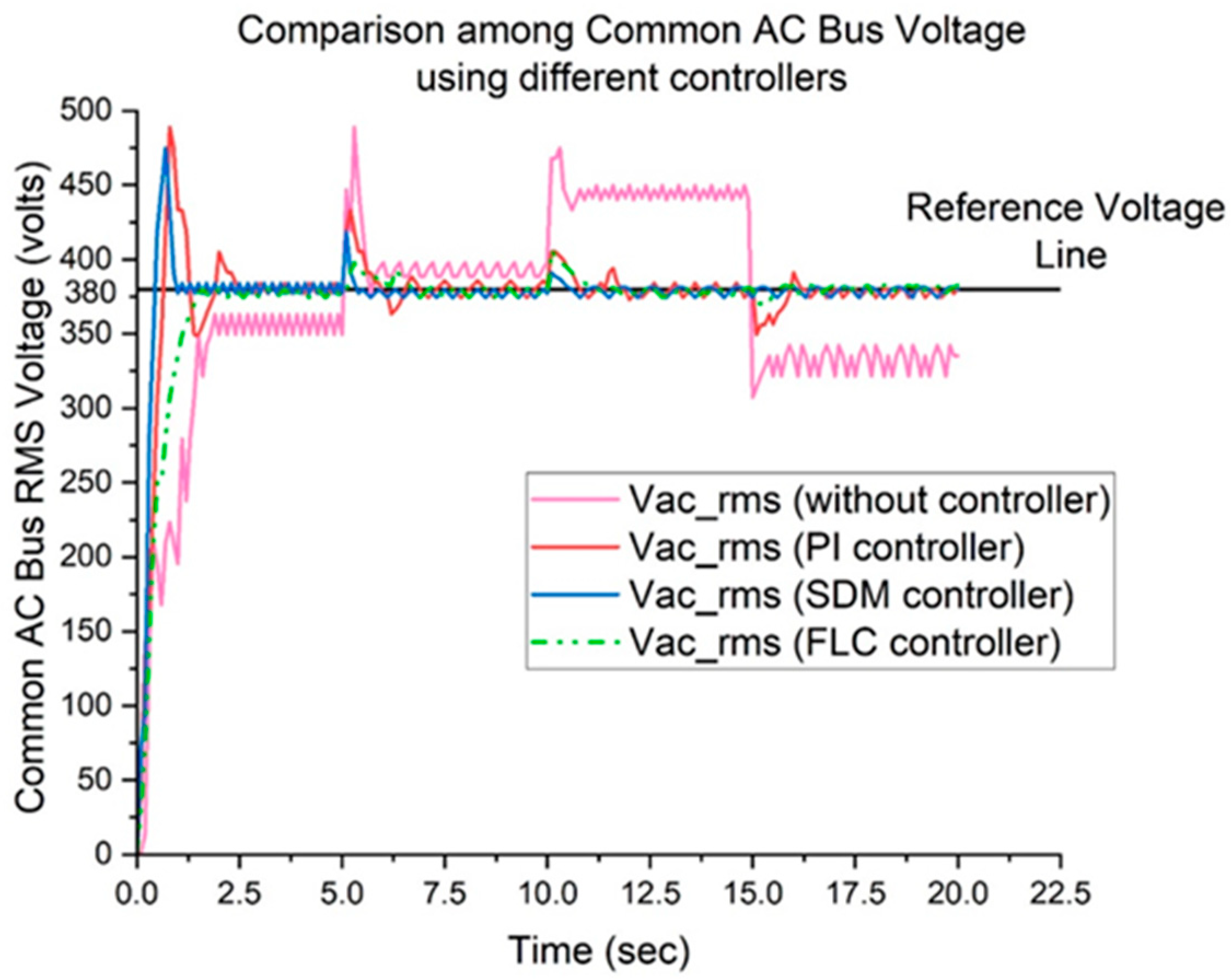
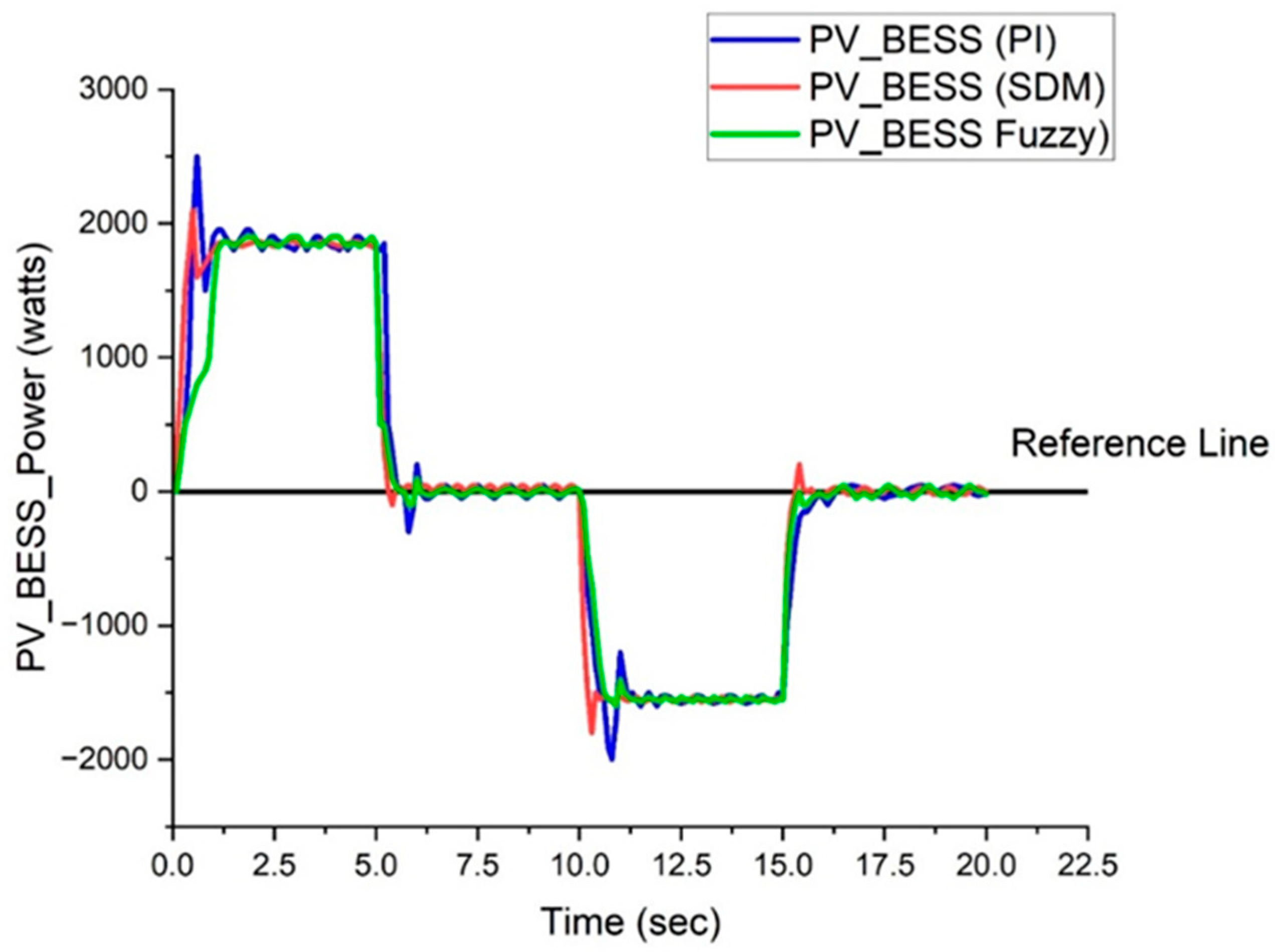
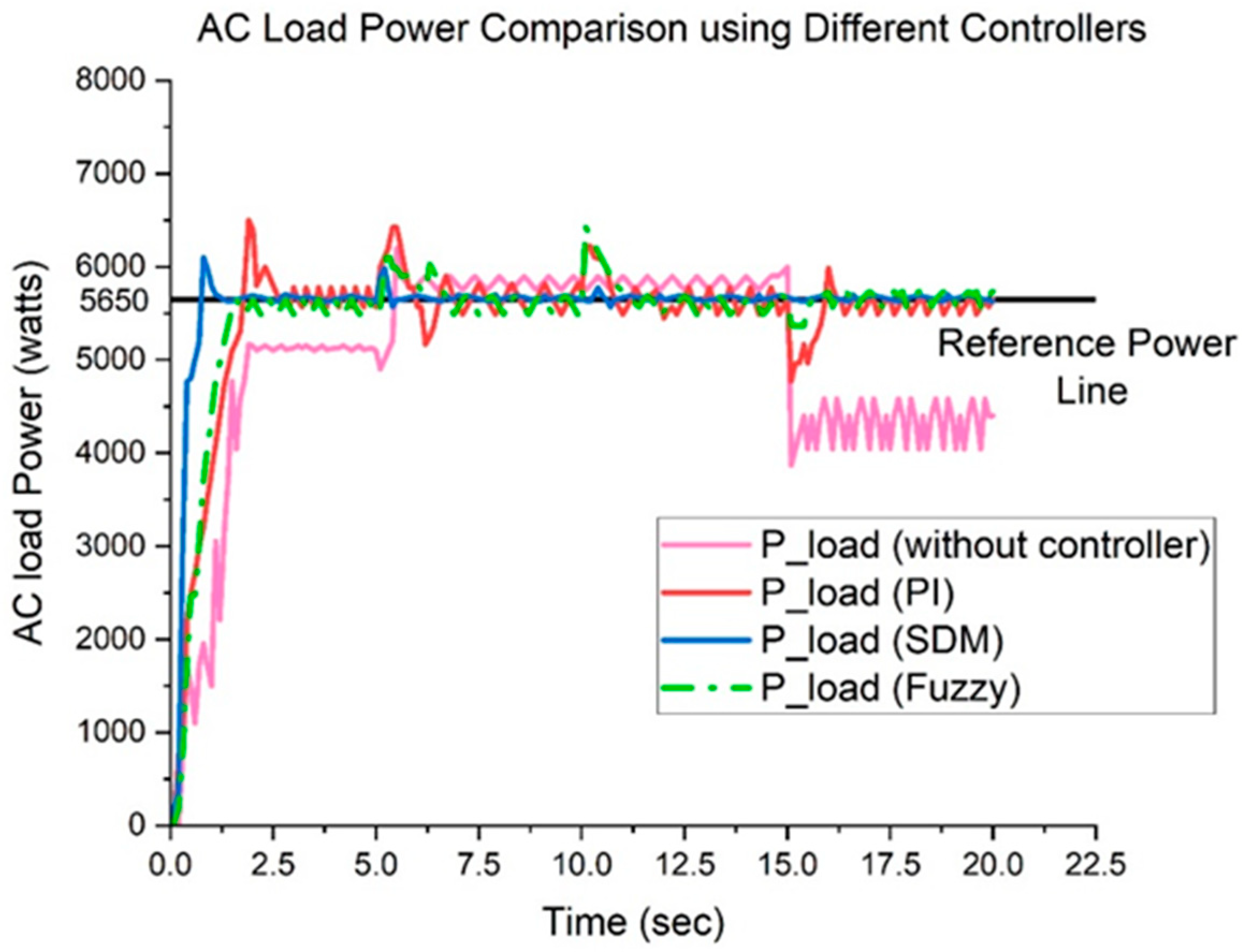
5.4. Performance of Different Controllers for Single Battery Hybrid Microgrid System
5.5. Index-Based Performance Comparison
6. Proposed Improved Ensemble Method (SAMME AdaBoost)-Based Cyberattack Detection System for Hybrid Microgrid
- i.
- Start:
- ii.
- Initialize Weights:
- iii.
- Iteration over Boosting Rounds (Loop):
- Step A: Train Weak Classifier:
- Step B: Calculate Error Rate:
- Step C: Compute Classifier Weight:
- Step D: Update Sample Weights:
- Step E: Normalize Weights:
- iv.
- Aggregate Weak Classifiers:
- v.
- Generating Probability of each class:
- vi.
- Class Prediction:
- vii.
- End:
6.1. Application of Improved Ensemble Method in Detecting Cyberattacks
- i.
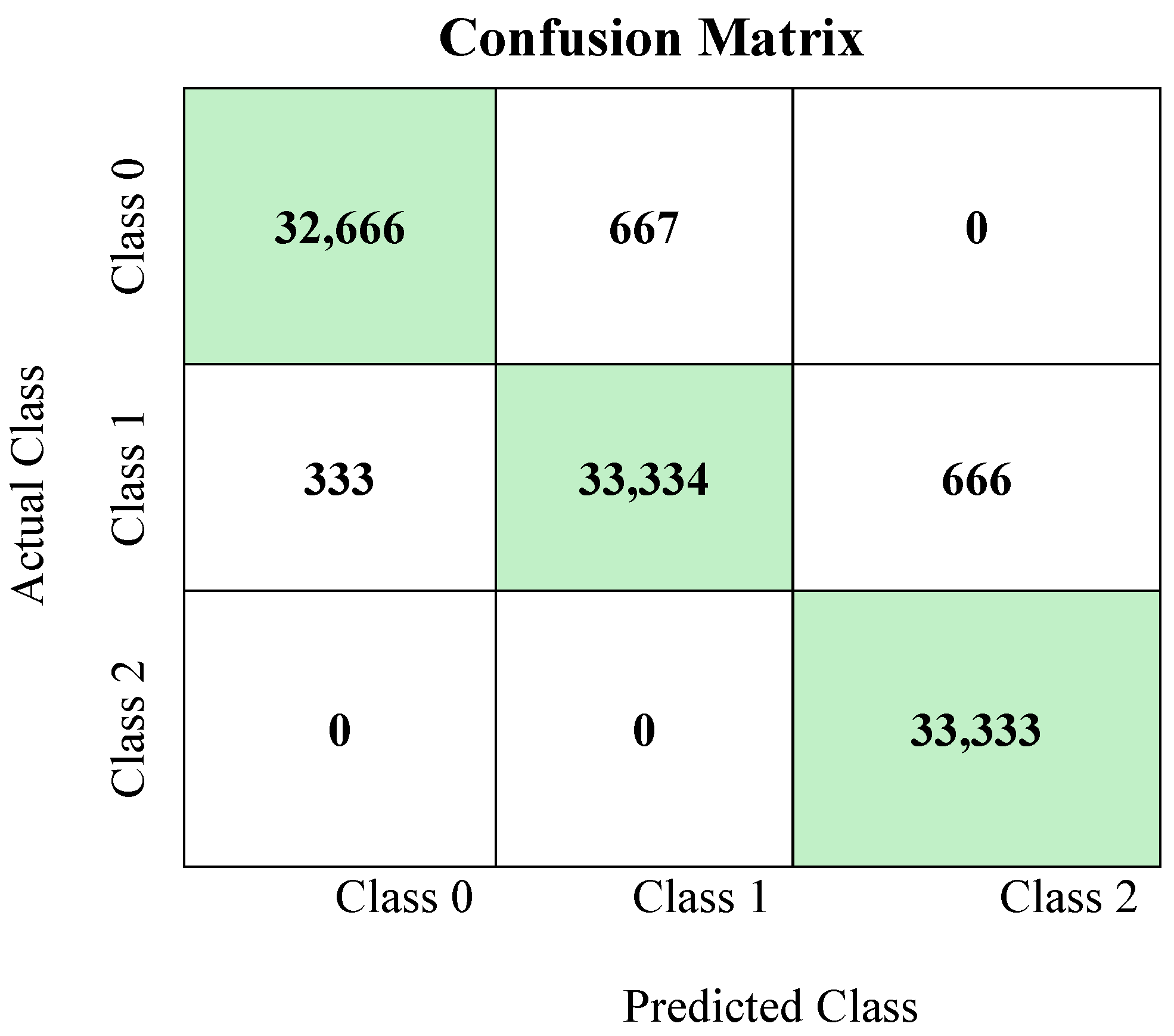
- Training the Model on Three Classes: In this scenario, each weak classifier in the ensemble will iteratively focus on distinguishing among the three classes, “no attack”, “FDI attack”, and “DoS attack”. The SAMME algorithm adjusts the weights of instances after each weak learner, giving more focus to instances that are misclassified in the previous round. This adjustment enables the model to improve its accuracy on difficult cases over time.
- ii.
- Handling Misclassification with Class Weights: SAMME calculates the influence of each weak classifier based on the number of classes, taking a unique approach to weighting. The algorithm adjusts each classifier’s weight based on its accuracy across all three classes, emphasizing the challenging-to-predict classes (e.g., if FDI and DoS attacks are harder to distinguish from each other or from the “no attack” class). This way, SAMME learns to differentiate each attack type by refining the decision boundaries between the three classes.
- iii.
- Sequential Training to Boost Accuracy: SAMME iterates through multiple weak classifiers, each one trained to improve on the errors of the previous classifiers. This sequential boosting of each learner’s focus on difficult cases results in a strong ensemble model capable of accurately categorizing whether a situation represents “no attack”, an “FDI attack”, or a “DoS attack”.
|
|
|
|
|
|
|
|
|
|
|
|
| |
| |
|
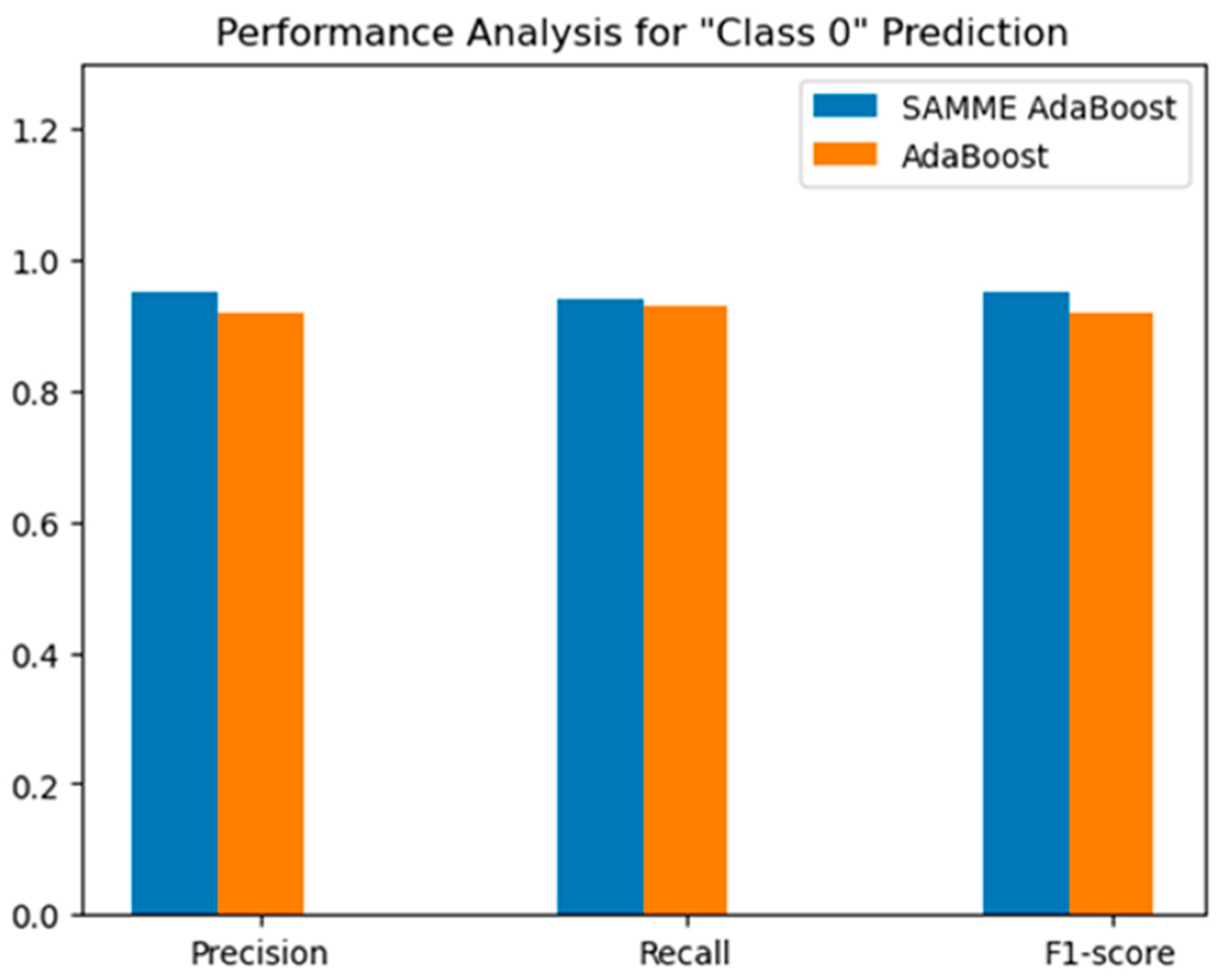
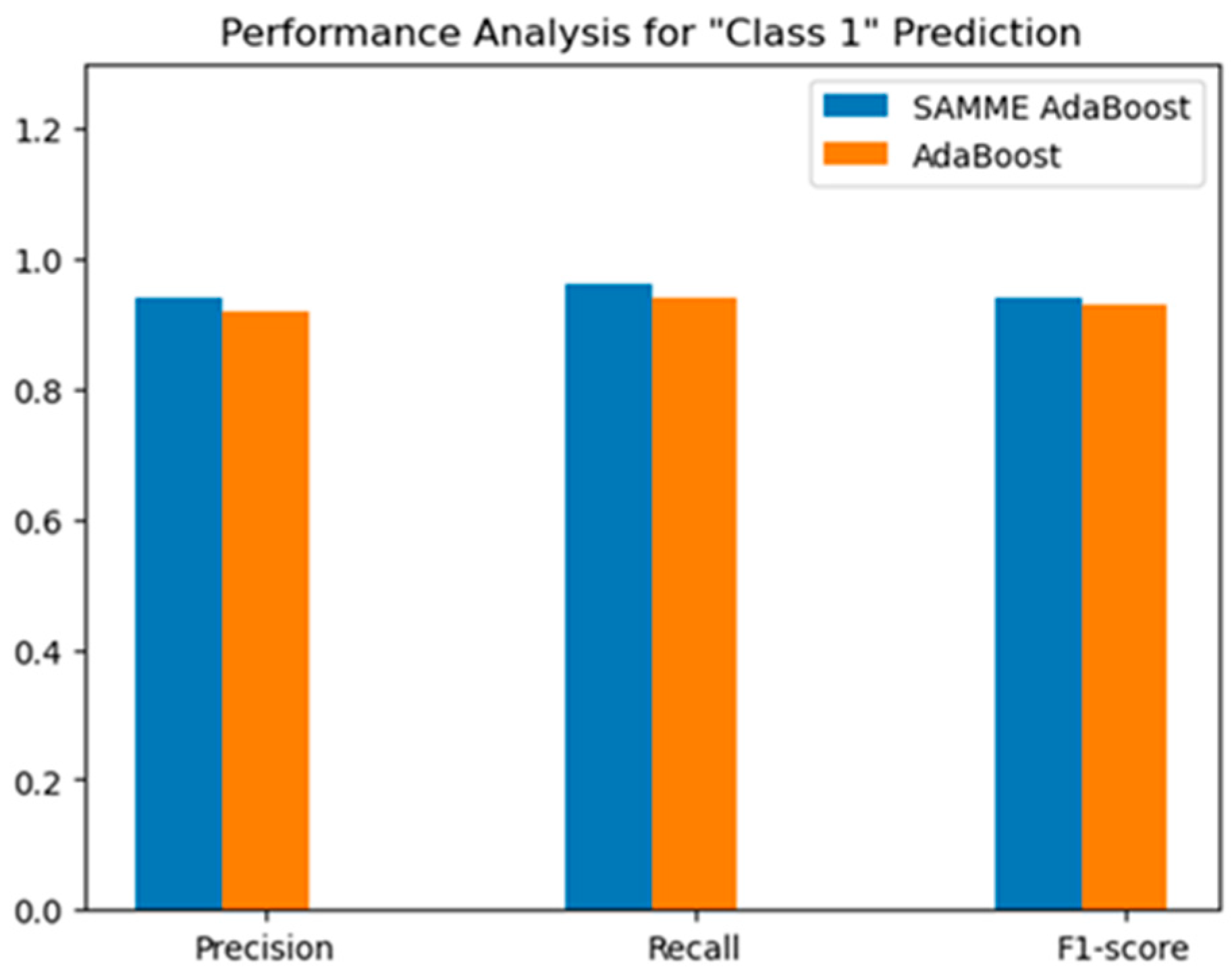
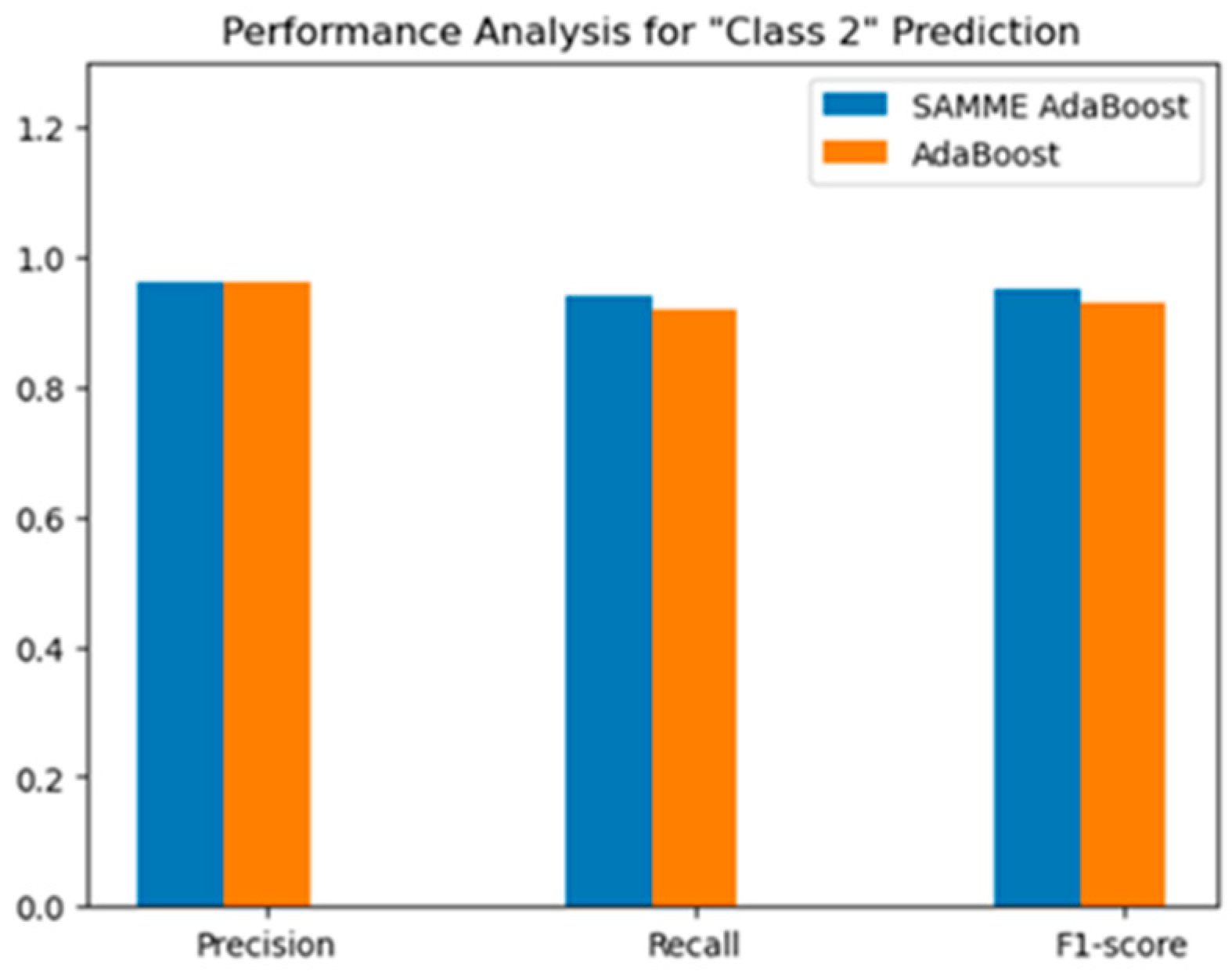
6.2. Comparison with Existing Ensemble Learning-Based Method
Performance Metrics
7. Conclusions
- ▪
- A sigma-delta modulation controller was developed to minimize the fluctuations in power and voltage due to the intermittent tendency of solar and wind generation sources.
- ▪
- The performance of the novel sigma-delta modulation controller was compared with that of the conventional PI and fuzzy logic controllers. Numerical results demonstrate the improved performance of the proposed SDM controller, with a 35% reduction in AC bus voltage error compared to conventional PI and FLC controllers.
- ▪
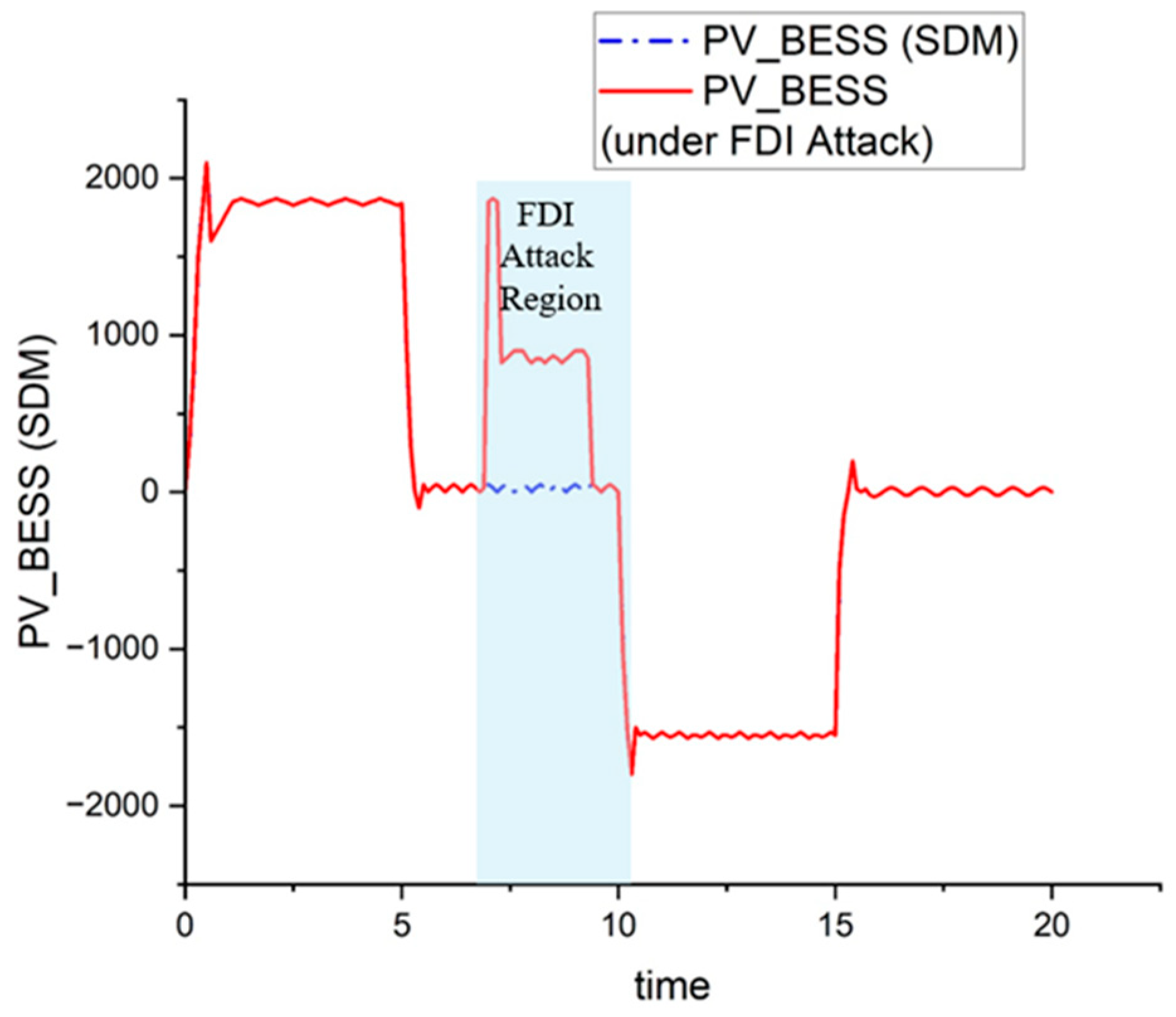
- The impact of two of the most common cyberattacks on the BESS controller of four PV-based microgrid systems was observed and analyzed.
- ▪
- The improved ensemble learning (SAMME AdaBoost)-based cyberattack detection technique was developed to make the IoT-enabled BESS-integrated microgrid systems more cyber resilient. The proposed SAMME AdaBoost detection method achieved superior accuracy with an F1 score of 95%, outperforming the existing ensemble approaches.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sl. No. | Parameters | Values |
|---|---|---|
| 1. | Maximum Power @ 800 W/m2 | 5300 W |
| 2. | Voltage at maximum power point | 180 V |
| 3. | Current at maximum power point | 29.9 A |
| 4. | Nominal Power @ 600 W/m2 | 3750 W |
| 5. | Open Circuit Voltage | 150 V |
| 6. | Short Circuit Current | 25 A |
| Sl. No. | Description | Values |
|---|---|---|
| 1. | Output voltage (Vout) | 400 V |
| 2. | Inductance (L) | 46 mH |
| 3. | Capacitance (C) | 27.1 µF |
| 4. | Switching frequency (fs) | 10 kHz |
| Sl. No. | Description | Values |
|---|---|---|
| 1. | Switching frequency (fs) | 10 KHz |
| 2. | Inductance, L | 0.5 mH |
| 3. | Boost capacitance, Cboost | 17.3 µF |
| 4. | Buck capacitance, Cbuck | 50.3 µF |
| Sl. No. | Description | Values |
|---|---|---|
| 1. | Initial State of Charge | 45% |
| 2. | Nominal Voltage | 320 V |
| 3. | Rated Capacity | 100 Ah |
| 4. | Battery Response Time | 1 s |
| Sl. No. | Description | Values |
|---|---|---|
| 1. | Inductance, L | 0.213 mH |
| 2. | Capacitance, C | 14.32 µF |
References
- Makhanya, T.; Sewsunker, R.; Pillay, N. A Distributed Standalone Solar PV and Battery Energy Storage System DC Microgrid. In Proceedings of the 2023 31st Southern African Universities Power Engineering Conference (SAUPEC), Johannesburg, South Africa, 24–26 January 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Ma, R.; Gan, W.; Yan, S. Optimal Dispatch for Battery Energy Storage Station in Distribution Network Considering Voltage Distribution Improvement and Peak Load Shifting. J. Mod. Power Syst. Clean Energy 2022, 10, 131–139. [Google Scholar] [CrossRef]
- Šriupša, L.; Dosinas, J.; Vaitkūnas, M.; Jonaitis, A.; Baronas, A.; Gudžiūtė, S. Employment of a DC microgrid for more efficient use of solar energy in household buildings. In Proceedings of the 2022 IEEE 63th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 10–12 October 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Hofer, J.; Svetozarevic, B.; Schlueter, A. Hybrid AC/DC building microgrid for solar PV and battery storage integration. In Proceedings of the 2017 IEEE Second International Conference on DC Microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017; pp. 188–191. [Google Scholar] [CrossRef]
- Mahmud, R.; Hossain, M.A.; Pota, H. Robust Nonlinear Controller Design for Islanded Photovoltaic System with Battery Energy Storage. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Naqvi, S.B.Q.; Kumar, S.; Singh, B. A PV-Battery System Operating in Islanded and Grid Connected Modes with Shunt Active Filter Capability. In Proceedings of the 2020 IEEE Industry Applications Society Annual Meeting, Detroit, MI, USA, 10–16 October 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Madadi, M.; Bhattacharya, S. Adaptive Nonlinear Droop Control with Dynamic State-of-Charge Balancing Capability for Batteries in DC Microgrids. In Proceedings of the 2021 IEEE Applied Power Electronics Conference and Exposition (APEC), Phoenix, AZ, USA, 14–17 June 2021; pp. 55–61. [Google Scholar]
- Yang, Y.; Xu, D.; Ma, T.; Su, X. Adaptive Cooperative Terminal Sliding Mode Control for Distributed Energy Storage Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 434–443. [Google Scholar] [CrossRef]
- Patel, S.; Ghosh, A.; Ray, P.K. Adaptive power management in PV/Battery integrated hybrid microgrid system. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Akpolat, A.N.; Habibi, M.R.; Baghaee, H.R.; Dursun, E.; Kuzucuoğlu, A.E.; Yang, Y.; Dragičević, T.; Blaabjerg, F. Dynamic Stabilization of DC Microgrids Using ANN-Based Model Predictive Control. IEEE Trans. Energy Convers. 2022, 37, 999–1010. [Google Scholar] [CrossRef]
- Patnaik, S.; Kumar, M.R.; Mishra, S.K.; Gautam, S.P. Fuzzy Controller Based DC Bus Voltage Stabilization of Hybrid Energy Storage System for PV Applications with Charging Efficiency Analysis. In Proceedings of the 2023 International Conference on Communication, Circuits, and Systems (IC3S), Bhubaneswar, India, 26–28 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, S.; Dragicevic, T.; Wheeler, P.; Zanchetta, P. Artificial Intelligence Techniques for Enhancing the Performance of Controllers in Power Converter-Based Systems—An Overview. IEEE Open J. Ind. Appl. 2023, 4, 366–375. [Google Scholar] [CrossRef]
- Roy, S.; Chishti, F.; Singh, B.; Panigrahi, B.K. GNLMP Control for Solar PV-Battery Based Microgrid With Ms-EPLL Syn-chronization. IEEE Trans. Ind. Appl. 2022, 58, 6599–6611. [Google Scholar] [CrossRef]
- Saha, J.; Liang, S.L.W.; Jun, N.F.C.; How, J.T.W.; Ann, L.; Panda, S.K. Transformation of Existing Commercial Building Cluster Towards Renewable Rich Microgrid: A Case Study for Marina Bay Sands Singapore. In Proceedings of the 2022 IEEE PES Innovative Smart Grid Technologies—Asia (ISGT Asia), Singapore, 1–5 November 2022; pp. 485–489. [Google Scholar] [CrossRef]
- Li, Q.; Li, F.; Zhang, J.; Ye, J.; Song, W.; Mantooth, A. Data-driven Cyberattack Detection for Photovoltaic (PV) Systems through Analyzing Micro-PMU Data. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 431–436. [Google Scholar] [CrossRef]
- Tareq, A.A.; Rana, J.; Mostofa, R.; Rahman, S. Impact of IoT and Embedded System on Semiconductor Industry A Case Study. Control Syst. Optim. Lett. 2024, 2, 211–216. [Google Scholar] [CrossRef]
- Obrien, V.; Trevizan, R.D.; Rao, V.S. Detecting False Data Injection Attacks to Battery State Estimation Using Cumulative Sum Algorithm. In Proceedings of the 2021 North American Power Symposium (NAPS), College Station, TX, USA, 14–16 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Tareq, A.A.; Mostofa, R.; Rana, J.; Rahman, S. A Comprehensive Review of Intelligent Home Automation Systems Using Embedded Devices and IoT. Control Syst. Optim. Lett. 2024, 2, 198–203. [Google Scholar] [CrossRef]
- Mao, J.; Zhang, M.; Xu, Q. CNN and LSTM based Data-driven Cyberattack Detection for Grid-connected PV Inverter. In Proceedings of the IEEE International Conference on Control and Automation, ICCA, IEEE Computer Society, Naples, Italy, 27–30 June 2022; pp. 704–709. [Google Scholar] [CrossRef]
- Ibrahim, H.; Kim, J.; Enjeti, P.; Kumar, P.R.; Xie, L. Detection of Cyber Attacks in Grid-tied PV Systems Using Dynamic Wa-termarking. In Proceedings of the IEEE Green Technologies Conference, IEEE Computer Society, Houston, TX, USA, 30 March–1 April 2022; pp. 57–61. [Google Scholar] [CrossRef]
- Mo, Y.; Sinopoli, B. On the Performance Degradation of Cyber-Physical Systems under Stealthy Integrity Attacks. IEEE Trans. Autom. Control 2016, 61, 2618–2624. [Google Scholar] [CrossRef]
- Mienye, I.D.; Sun, Y. A Survey of Ensemble Learning: Concepts, Algorithms, Applications, and Prospects. IEEE Access 2022, 10, 99129–99149. [Google Scholar] [CrossRef]
- Gaggero, G.B.; Caviglia, R.; Armellin, A.; Rossi, M.; Girdinio, P.; Marchese, M. Detecting Cyberattacks on Electrical Storage Systems through Neural Network Based Anomaly Detection Algorithm. Sensors 2022, 22, 3933. [Google Scholar] [CrossRef] [PubMed]
- Saiara, S.A.; Ali, M.H. An Ensemble Learning Based Cyber Attack Detection Technique for BESS Integrated PV System. In Proceedings of the SoutheastCon 2024, Atlanta, GA, USA, 15–24 March 2024; pp. 392–397. [Google Scholar] [CrossRef]
- Shahriar Haque, A.S.M.; Rahman, M.M.; Joy, C.J.I.; Hasan, M.S.; Aftabuzzaman, M.; Rahman, M.S. Levelized Cost of Energy and Cost-Benefit Analysis of 230 kV Bulk Power Transmission in Bangladesh. In Proceedings of the 12th International Conference on Electrical and Computer Engineering, ICECE 2022, Dhaka, Bangladesh, 21–23 December 2022; Institute of Electrical and Electronics Engineers (IEEE) Inc.: Piscataway, NJ, USA, 2023; pp. 236–239. [Google Scholar] [CrossRef]
- Habib, A.K.M.A.; Hasan, M.K.; Hassan, R.; Islam, S.; Thakkar, R.; Vo, N. Distributed denial-of-service attack detection for smart grid wide area measurement system: A hybrid machine learning technique. Energy Rep. 2023, 9, 638–646. [Google Scholar] [CrossRef]
- Hill, P.; Gilbert, J.; Myers, K.; Poudel, B. Inverter-Based Layered Volt-VAR Control Scheme for High-Penetration Microgrids. In Proceedings of the 2024 IEEE Power & Energy Society General Meeting (PESGM), Seattle, WA, USA, 21–25 July 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Distribution voltage control for DC microgrids using fuzzy control and gain-scheduling technique. IEEE Trans. Power Electron. 2012, 28, 2246–2258. [Google Scholar] [CrossRef]
- Ma, W. Optimal Allocation of Hybrid Energy Storage Systems for Smoothing Photovoltaic Power Fluctuations Considering the Active Power Curtailment of Photovoltaic. IEEE Access 2019, 7, 74787–74799. [Google Scholar] [CrossRef]
- Pour, S.D.; Eslami, R.; Marzband, M.; Shoja-Majidabad, S. Nonlinear Robust Voltage Regulation and Balanced Demand Re-sponse of an Islanded DC Microgrid. In Proceedings of the 2021 11th Smart Grid Conference (SGC), Tabriz, Iran, 7–9 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Hasan, M.M.; Jaman, S.; Geury, T.; Hegazy, O. Design and Simulation of a Grid-Connected Two-Stage Bidirectional Converter for a Combined PV-Stationary Energy Storage System. In Proceedings of the 2022 Second International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Cassino, Italy, 23–25 November 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, A.; Sibtain, D.; Khalid, M. An Innovative Converterless Solar PV Control Strategy for a Grid Connected Hybrid PV/Wind/Fuel-Cell System Coupled With Battery Energy Storage. IEEE Access 2023, 11, 23245–23259. [Google Scholar] [CrossRef]
- Keskar, N.A.; RincÓn-Mora, G.A. A Fast, Sigma–Delta (ΣΔ) Boost DC–DC Converter Tolerant to Wide LC Filter Variations. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 198–202. [Google Scholar] [CrossRef]
- Rahman, S. Development of Novel Controllers to Address the Misalignment Problem of Dynamic Wireless Charging of Electric Vehicles. Available online: https://digitalcommons.memphis.edu/etd (accessed on 30 September 2024).
- Choudhury, A.R.; Pati, S.; Choudhury, A.; Mohanty, K.B. Control of voltage & frequency of a hybrid microgrid using a FLC based bidirectional converter equipped with BESS. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Rahman, M.S.; Ali, M.H. Adaptive Neuro Fuzzy Inference System (ANFIS) Based Control for Misalignment Problem Solution to Vehicle-to-Vehicle Dynamic Wireless Charging System. Authorea Prepr. 2024. [Google Scholar] [CrossRef]
- Rahman, M.S.; Ali, M.H. Development of Controllers for Compensating Misalignment in Vehicle-to-Vehicle Dynamic Wireless Charging System. In Proceedings of the IEEE SoutheastCon, Atlanta, GA, USA, 15–24 March 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024; pp. 374–379. [Google Scholar] [CrossRef]
- Kurniawan, R.; Gusti, S.K.; Syamsudhuha; Sukamto; Abdillah, R. Predicting Career Trajectories of Information System Graduates Using AdaBoost Algorithm. In Proceedings of the 2023 9th International Conference on Wireless and Telematics (ICWT), Solo, Indonesia, 6–7 July 2023; pp. 1–5. [Google Scholar] [CrossRef]












| Controller Parameters | Values |
|---|---|
| Reference DC Power (Pref) | 3750 watts |
| Reference DC bus Voltage (Vref) | 400 volts |
| Integrator Gain (K) | 0.02 |
| Feedback Loop Gain | 1 |
| Comparator Threshold (Vth) | −0.5 < e < 0.5 |
| Clock Frequency (fs) | 100 kHz |
| Step Size | 0.01 |
| Quantization Level | 3 levels (1, 0 and −1) |
| Controller Parameters | Values |
|---|---|
| Reference AC load Power (Pref) | 3750 watts |
| Reference DC bus Voltage (Vref) | 400 volts |
| Reference AC bus Voltage (Vrms) | 280 volts |
| Integrator Gain (K) | 0.01 |
| Integrator Limit | ±100 |
| Comparator Threshold | 1 |
| Clock Frequency (fs) | 100 kHz |
| Step Size | 0.01 |
| Quantization Level | 3 levels (1, 0 and −1) |
| Initial Duty cycle (D) | 0.5 |
| Feedback Loop Gain | 1 |
| Inverter Frequency | 60 |
| Controller Parameters | BESS-1 (PV) | BESS-2 (Wind) |
|---|---|---|
| Reference AC load Power (Pref) | 3750 watts | 1500 watts |
| Integrator Gain (K) | 0.005 | 0.01 |
| Integrator Limit | ±100 | ±200 |
| Comparator Threshold | −0.5 < e < 0.5 | −0.5 < e < 0.5 |
| Clock Frequency (fs) | 100 kHz | 100 kHz |
| Step Size | 0.01 | 0.01 |
| Quantization Level | 3 levels (1, 0 and −1) | 3 levels (1, 0 and −1) |
| Initial Duty cycle (D) | 0.5 | 0.5 |
| Feedback Loop Gain | 1 | 1 |
| Inverter Frequency | 60 Hz | 60 Hz |
| Controller Parameters | Values |
|---|---|
| Reference AC load Power (Pref) | 5600 watts |
| Reference AC bus Voltage (Vrms) | 380 volts |
| Integrator Gain (K) | 0.01 |
| Integrator Limit | ±200 |
| Comparator Threshold | −0.5 < e < 0.5 |
| Clock Frequency (fs) | 50 kHz |
| Step Size | 0.01 |
| Quantization Level | 3 levels (1, 0 and −1) |
| Initial Duty Cycle (D) | 0.5 |
| Feedback Loop Gain | 1 |
| Inverter Frequency | 60 Hz |
| Controller Parameters | Values |
|---|---|
| Reference DC Power (Pref) | 3750 watts |
| Reference DC bus Voltage (Vref) | 400 volts |
| Stage 1: Integrator Gain (Ki) | 0.01 |
| Stage 1: Proportional Gain (Kp) | 0.5 |
| Stage 2: Integrator Gain (Ki) | 5 |
| Stage 2: Proportional Gain (Kp) | 20 |
| PWM Generator Frequency (fs) | 10 kHz |
| Controller Parameters | Values |
|---|---|
| Reference DC Power (Pref) | 3750 watts |
| Reference DC bus Voltage (Vref) | 400 volts |
| Stage 1: Integrator Gain (Ki) | 0.1 |
| Stage 1: Proportional Gain (Kp) | 1 |
| Stage 2: Integrator Gain (Ki) | 2 |
| Stage 2: Proportional Gain (Kp) | 3.5 |
| PWM Generator Frequency (fs) | 10 kHz |
| Controller Parameters | BESS-1 (PV) | BESS-2 (Wind) |
|---|---|---|
| Reference DC Power (Pref) | 3750 watts | 1500 watts |
| Reference DC bus Voltage (Vref) | 400 volts | 400 volts |
| Stage 1: Integrator Gain (Ki) | 0.03 | 0.1 |
| Stage 1: Proportional Gain (Kp) | 1 | 1 |
| Stage 2: Integrator Gain (Ki) | 3 | 2 |
| Stage 2: Proportional Gain (Kp) | 20 | 3.5 |
| PWM Generator Frequency (fs) | 10 kHz | 10 kHz |
| Controller Parameters | Values |
|---|---|
| Reference DC Power (Pref) | 5600 watts |
| Reference DC bus Voltage (Vref) | 380 volts |
| Stage 1: Integrator Gain (Ki) | 1 |
| Stage 1: Proportional Gain (Kp) | 2.7 |
| Stage 2: Integrator Gain (Ki) | 5 |
| Stage 2: Proportional Gain (Kp) | 25 |
| PWM Generator Frequency (fs) | 10 kHz |
| Fuzzy Input (ΔP) | Fuzzy Output (D) |
|---|---|
| NS | S |
| Z | M |
| PS | L |
| PB | VL |
| Controller Information | Parameters |
|---|---|
| Input | Error in power, ΔP |
| Output | Duty Cycle, D |
| Input MFs | 4 nos: NS, Z, PS, PB (all triangular equispaced) |
| Output MFs | 4 nos: S, M, L, VL (all triangular equispaced) |
| Fuzzy Rule Base Mapping | 4 (NS-S, Z-M, PS-L, PB-VL) |
| Controller Information | Parameters |
|---|---|
| Input | Error in power, ΔP |
| Output | Duty Cycle, D |
| Input MFs | 4 nos: NS, Z, PS, PB (3 triangular equispaced, 1 trapezoidal) |
| Output MFs | 4nos: S, M, L, VL (all triangular but not equispaced) |
| Fuzzy Rule Base Mapping | 4 (NS-S, Z-M, PS-L, PB-VL) |
| Controller Information | BESS-1 (PV) | BESS-2 (Wind) |
|---|---|---|
| Input | Error in power, ΔP | Error in power, ΔP |
| Output | Duty Cycle, D | Duty Cycle, D |
| Input MFs | 4 nos: NS, Z, PS, PB (2 triangular equispaced, 2 trapezoidal) | 4 nos: NS, Z, PS, PB (3 triangular equispaced, 1 trapezoidal) |
| Output MFs | 4 nos: S, M, L, VL (all triangular but not equispaced) | 4 nos: S, M, L, VL (all triangular but not equispaced) |
| Fuzzy Rule Base Mapping | 4 (NS-S, Z-M, PS-L, PB-VL) | 4 (NS-S, Z-M, PS-L, PB-VL) |
| Controller Information | Parameters |
|---|---|
| Input | Error in power, ΔP |
| Output | Duty Cycle, D |
| Input MFs | 4 nos: NS, Z, PS, PB (3 gaussian equispaced, 1 bell shaped) |
| Output MFs | 4nos: S, M, L, VL (all trapezoidal, but not equispaced) |
| Fuzzy Rule Base Mapping | 4 (NS-S, Z-M, PS-L, PB-VL) |
| Index | SDM Controller | Fuzzy Controller | PI Controller | Without Controller |
|---|---|---|---|---|
| (kJ) | 20.13 | 20.65 | 21.03 | - |
| (volt-sec) | 170.28 | 201.96 | 243.41 | 901.77 |
| Index | SDM Controller | Fuzzy Controller | PI Controller | Without Controller |
|---|---|---|---|---|
| (kJ) | 20.13 | 20.65 | 21.03 | - |
| (volt-sec) | 255.28 | 286.07 | 301.71 | 1123.87 |
| Index | SDM Controller | Fuzzy Controller | PI Controller | Without Controller |
|---|---|---|---|---|
| (kJ) | 17.03 | 17.25 | 17.33 | - |
| (kJ) | 12.20 | 12.56 | 12.83 | - |
| (volt-sec) | 213.60 | 353.09 | 396.31 | 1548.3 |
| (volt-sec) | 230.21 | 398.36 | 442.41 | 1611.88 |
| (volt-sec) | 141.76 | 180.14 | 220.85 | 920.34 |
| Index | SDM Controller | Fuzzy Controller | PI Controller | Without Controller |
|---|---|---|---|---|
| (kJ) | 20.77 | 22.88 | 22.97 | - |
| (volt-sec) | 385.07 | 398.45 | 411.32 | 1823.27 |
| Parameters | Model | Class 0 Prediction | Class 1 Prediction | Class 2 Prediction |
|---|---|---|---|---|
| Precision | SAMME | 0.95 | 0.94 | 0.96 |
| AdaBoost | 0.92 | 0.92 | 0.96 | |
| Recall | SAMME | 0.94 | 0.96 | 0.95 |
| AdaBoost | 0.93 | 0.94 | 0.94 | |
| F1-Score | SAMME | 0.95 | 0.94 | 0.95 |
| AdaBoost | 0.92 | 0.93 | 0.94 | |
| Average Accuracy | SAMME | 0.9835 | ||
| AdaBoost | 0.9657 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saiara, S.A.; Ali, M.H. Sigma Delta Modulation Controller and Associated Cybersecurity Issues with Battery Energy Storage Integrated with PV-Based Microgrid. Energies 2024, 17, 6463. https://doi.org/10.3390/en17246463
Saiara SA, Ali MH. Sigma Delta Modulation Controller and Associated Cybersecurity Issues with Battery Energy Storage Integrated with PV-Based Microgrid. Energies. 2024; 17(24):6463. https://doi.org/10.3390/en17246463
Chicago/Turabian StyleSaiara, Syeda Afra, and Mohd. Hasan Ali. 2024. "Sigma Delta Modulation Controller and Associated Cybersecurity Issues with Battery Energy Storage Integrated with PV-Based Microgrid" Energies 17, no. 24: 6463. https://doi.org/10.3390/en17246463
APA StyleSaiara, S. A., & Ali, M. H. (2024). Sigma Delta Modulation Controller and Associated Cybersecurity Issues with Battery Energy Storage Integrated with PV-Based Microgrid. Energies, 17(24), 6463. https://doi.org/10.3390/en17246463