
Recent Advances in Self-Powered Electronic Skin Based on Triboelectric Nanogenerators
 ,
,  and
and
Abstract
:1. Introduction
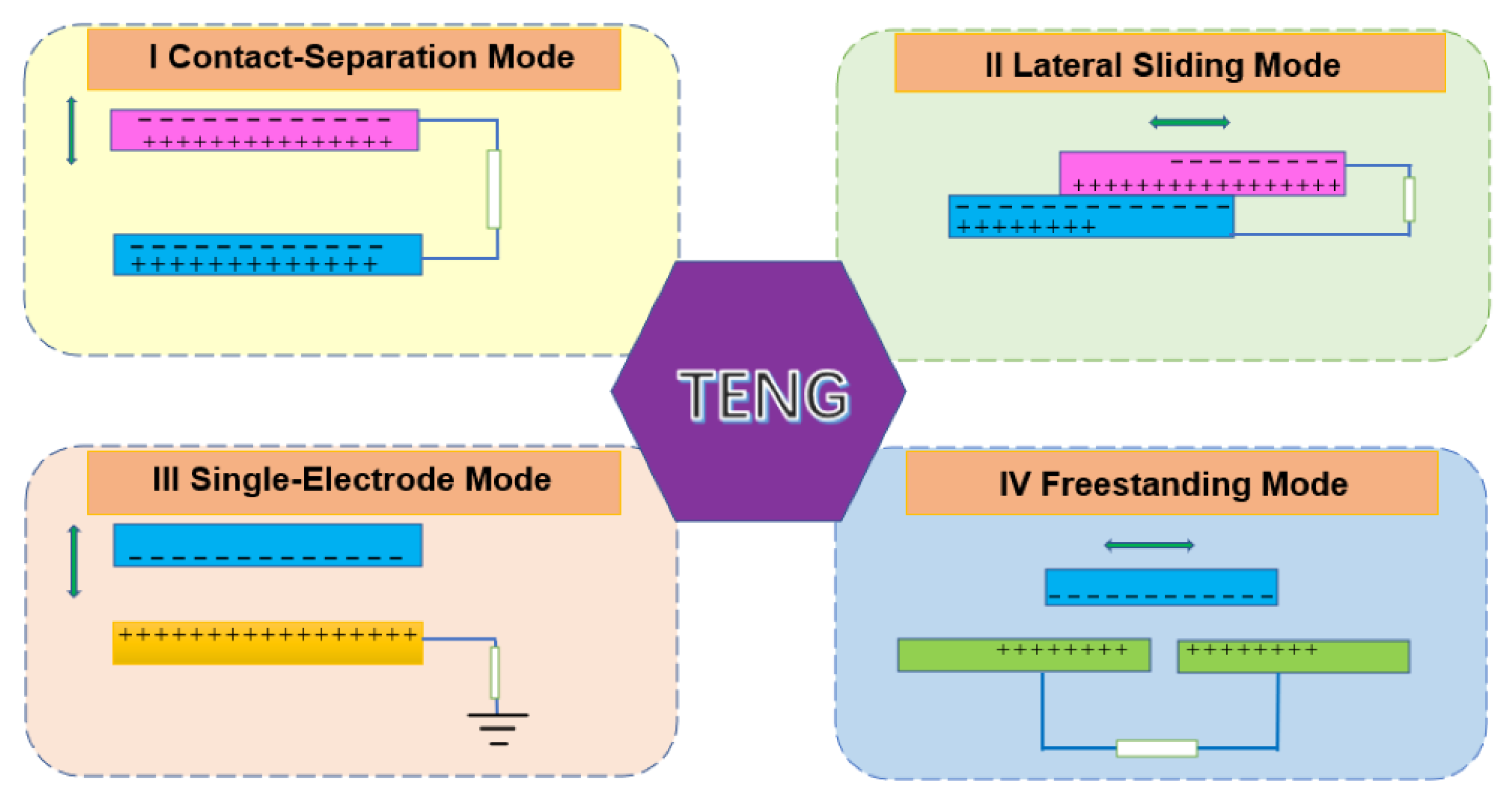
2. Basic Principle and Working Mode of Triboelectric Nanogenerators
2.1. Contact-Separation Mode
2.2. Lateral-Sliding Mode
2.3. Single-Electrode Mode
2.4. Freestanding Mode
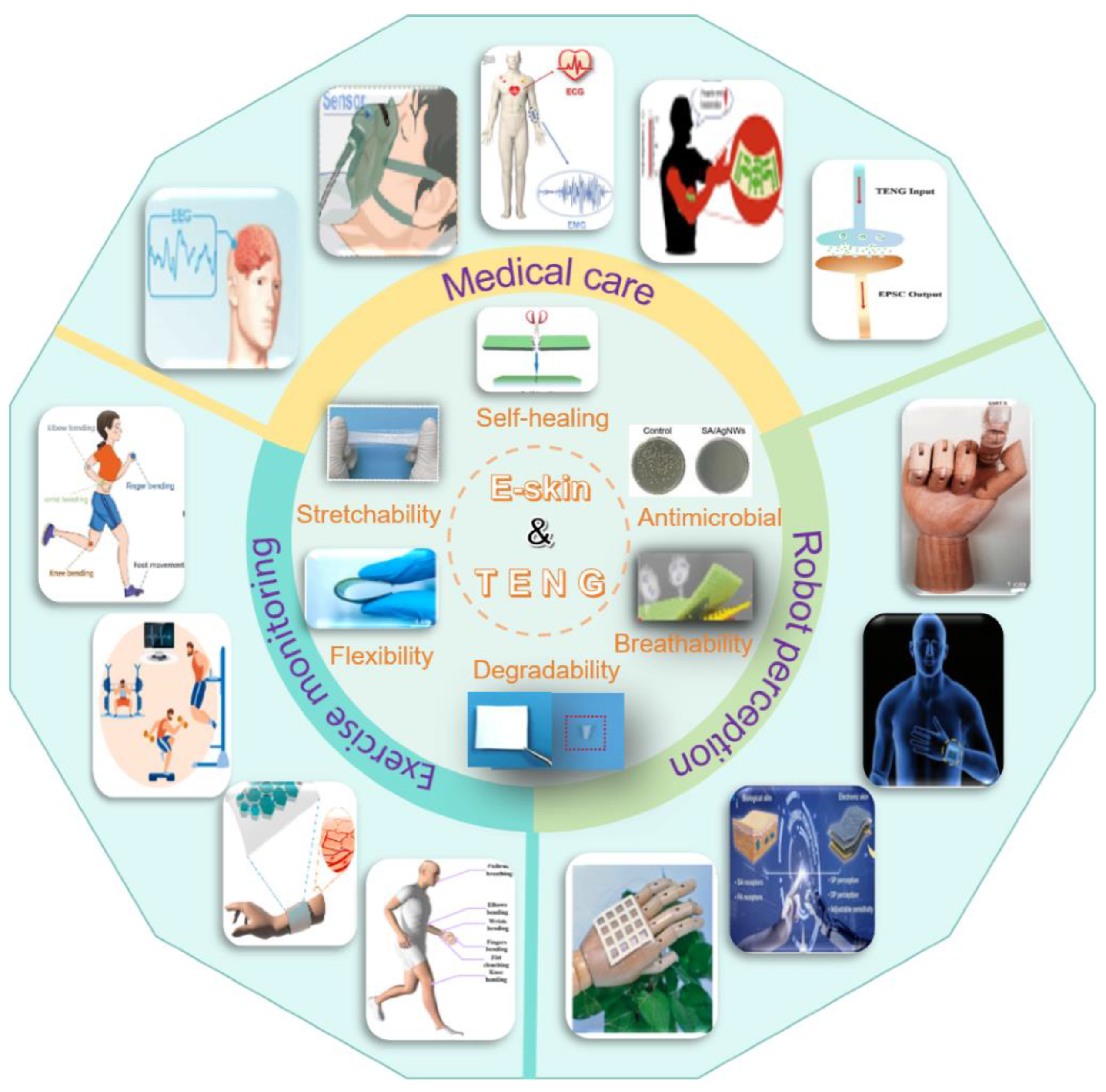
3. Functional Characteristics of Self-Powered Electronic Skin Based on TENG
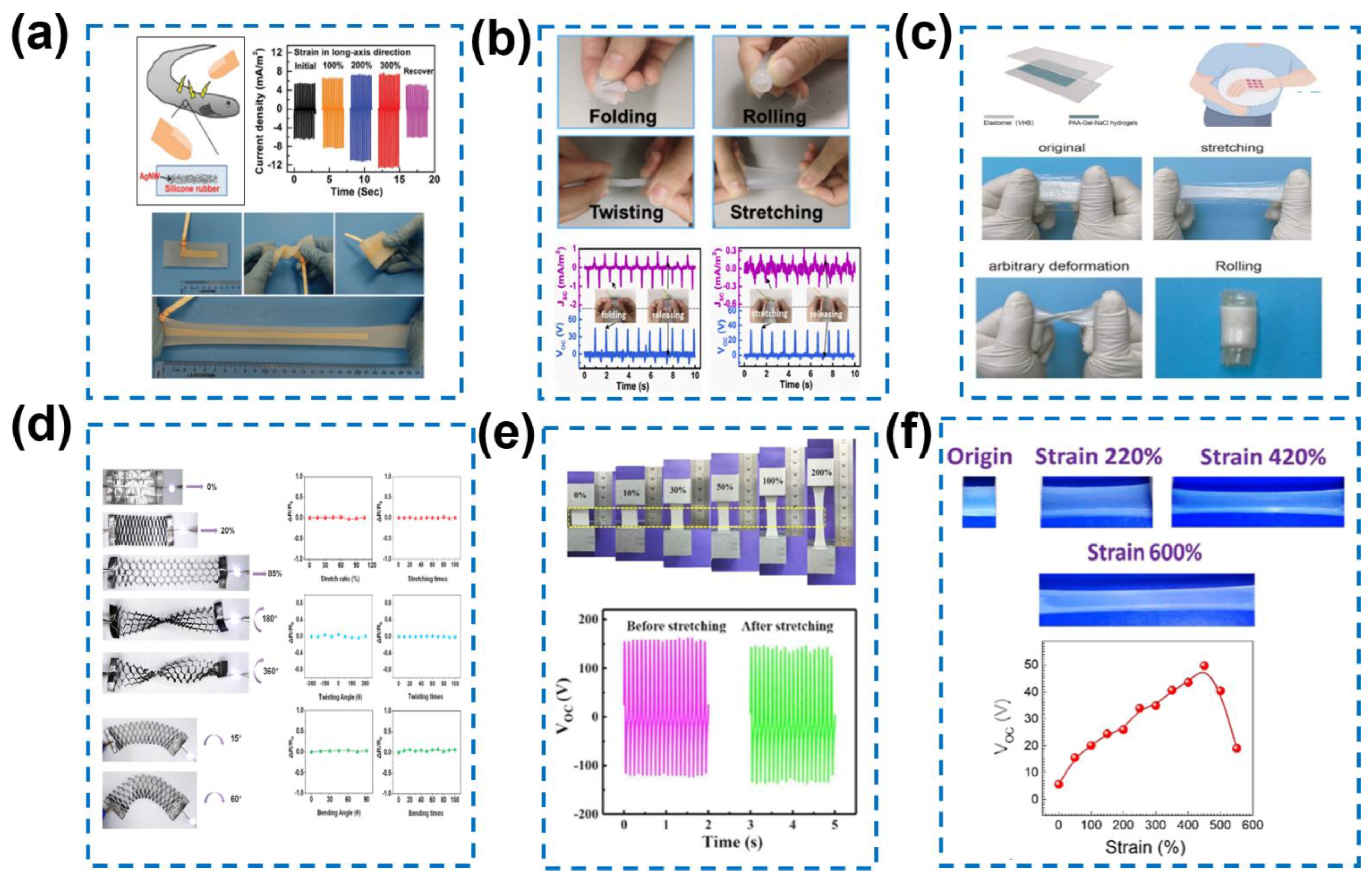
3.1. Flexibility and Stretchability
3.2. Self-Healing and Degradability
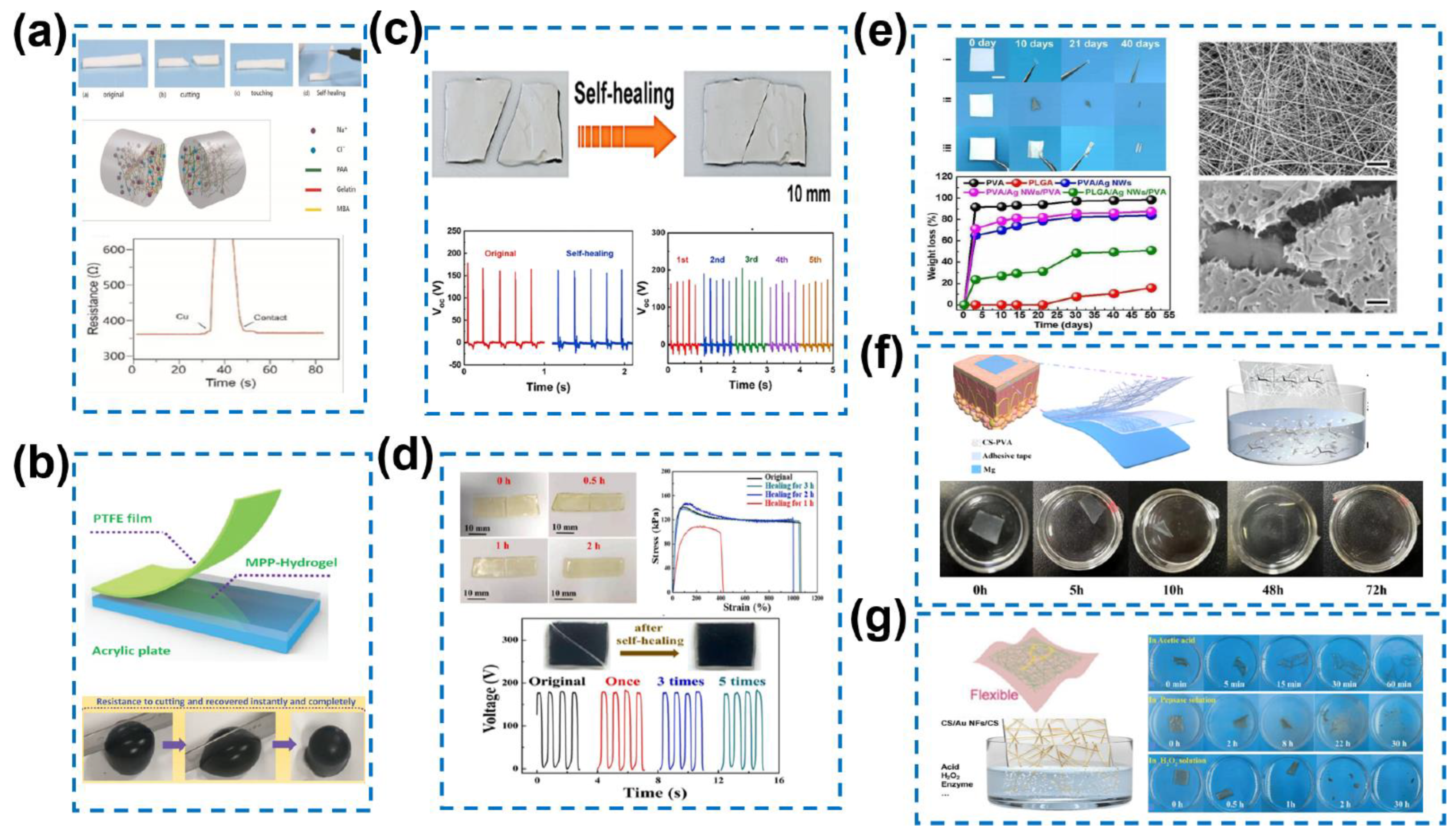
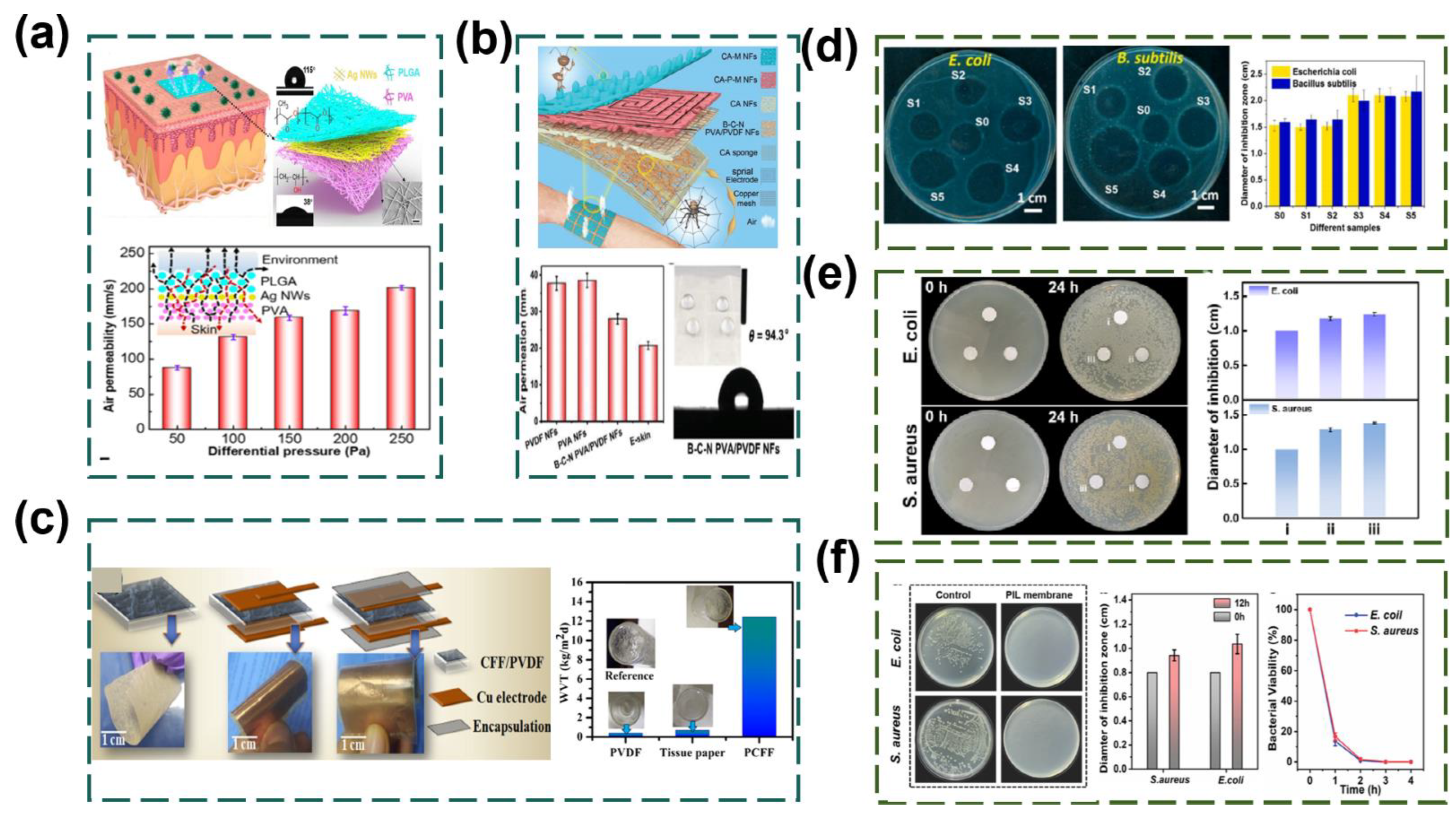
3.3. Breathability and Antibacterial Properties
4. Practical Application of Self-Powered Electronic Skin Based on a Triboelectric Nanogenerator
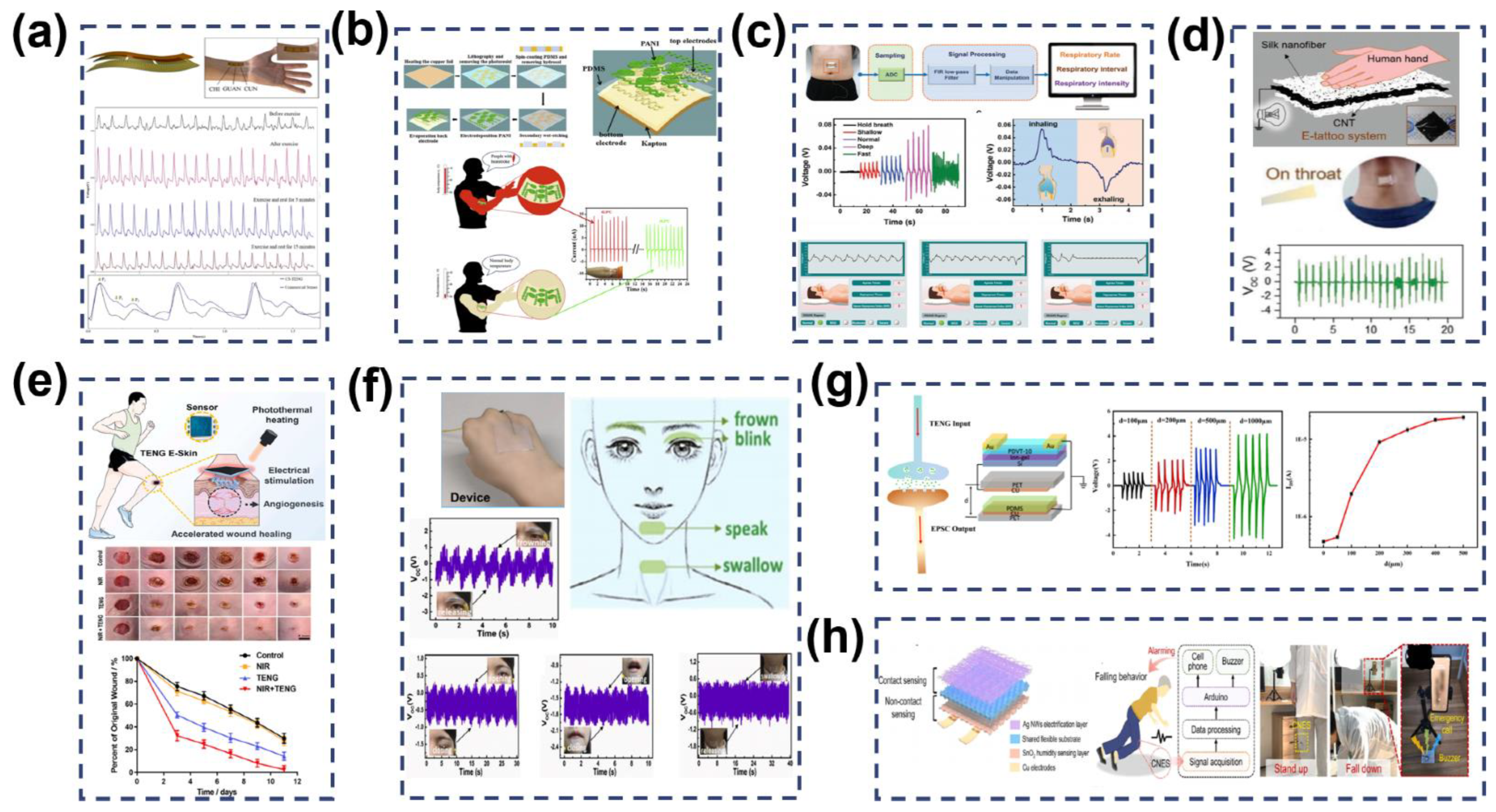
4.1. Application of Self-Powered Electronic Skin Based on TENG in Healthcare
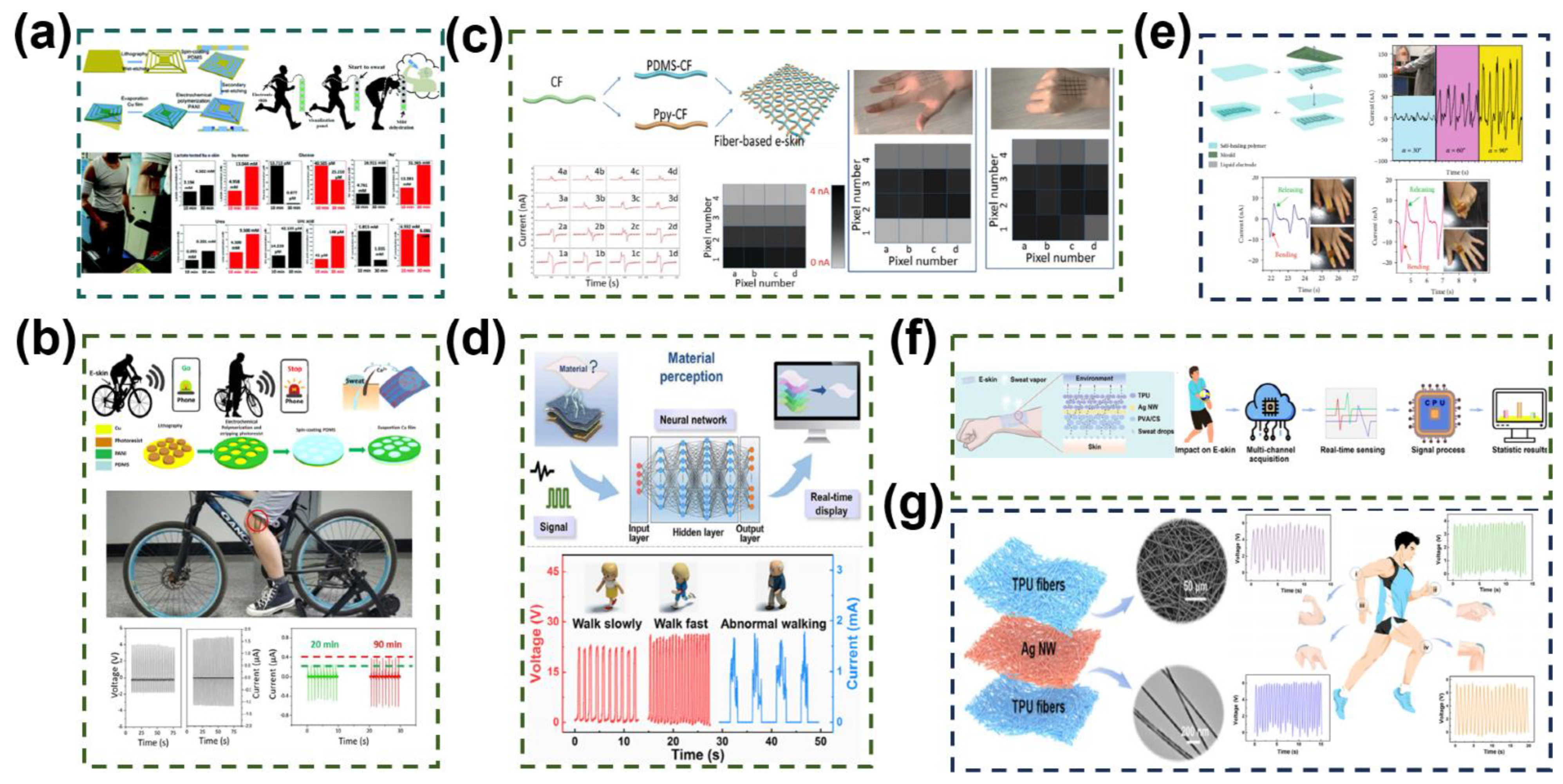
4.2. Application of Self-Powered Electronic Skin Based on TENG in Motion Monitoring
4.3. Application of Self-Powered Electronic Skin Based on TENG in Machine Tactile Recognition
5. Conclusions and Outlook
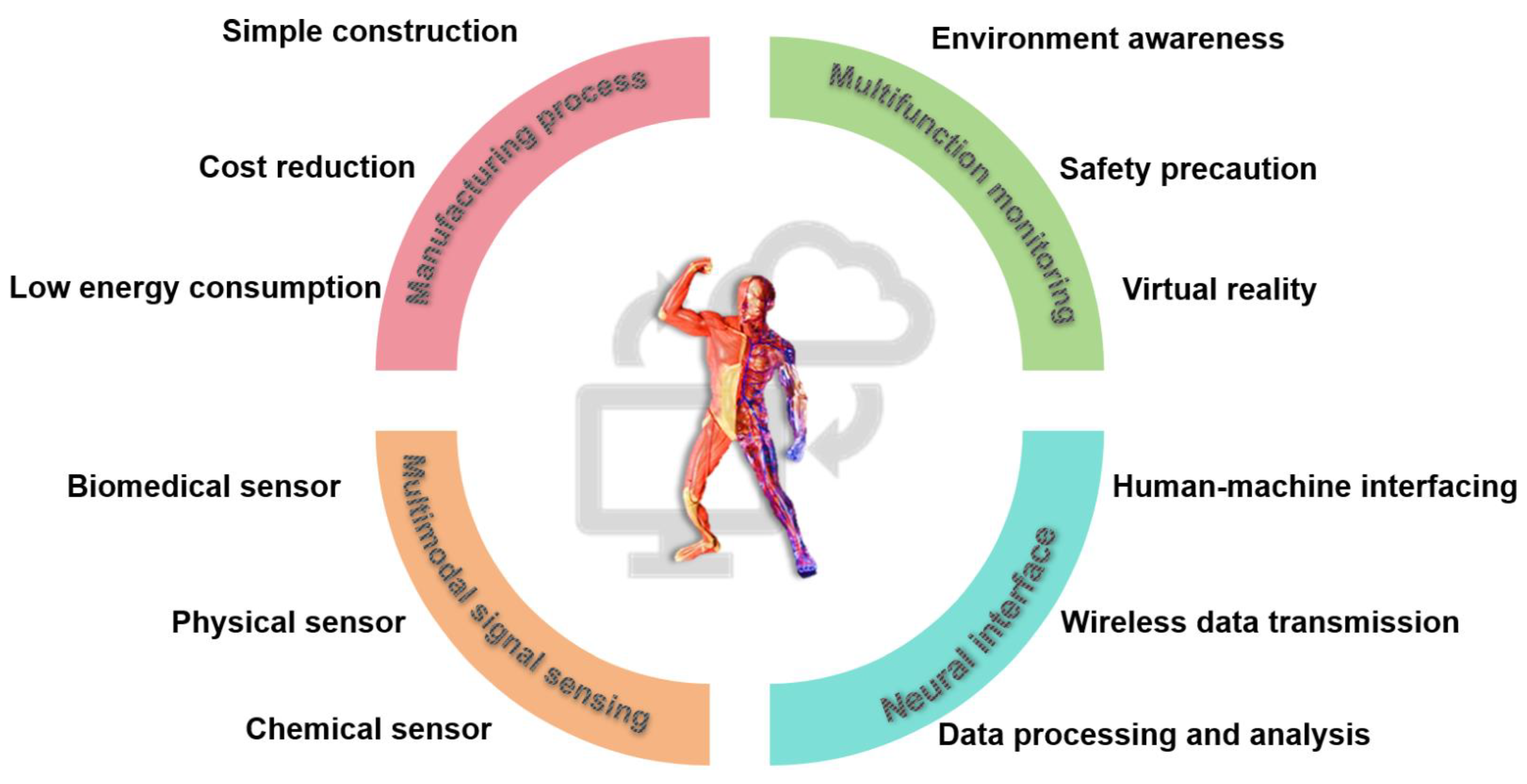
- Manufacturing process. The manufacturing process for electronic skins is often complex due to the numerous performance requirements that they must meet. Additionally, many self-powered electronic skins based on TENG necessitate the synthesis and structural design of chemical materials to accommodate diverse applications. Therefore, research into methods that can simplify the manufacturing process while retaining the various characteristics of electronic skin is essential. Furthermore, cost-efficiency and low energy consumption are crucial advantages in manufacturing technology, especially with TENG’s ability to harness mechanical energy from the surrounding environment [124]. Research should continue to explore ways to reduce costs and energy consumption in the design and production of electronic skins based on TENG, including the use of recyclable materials as primary components.
- Multifunction monitoring. Recent studies have primarily focused on improving electronic skin’s tactile perception, intelligent recognition, and human health monitoring. While these are essential functions, there is an opportunity to enhance e-skin’s ability to perceive the surrounding environment and ensure user safety. This includes the integration of safety-related information into self-powered TENG-based e-skins for preventative purposes. Additionally, the growing momentum in visual technology presents an opportunity to integrate TENG energy-collection capabilities with electronic skins, offer increased power output and a more realistic user experience, thereby supporting a broader range of monitoring functions. Therefore, when future e-skins are capable of multifunctional monitoring, they may provide more comprehensive monitoring data and reduce the cost and complexity of using multiple separate monitoring devices.
- Multimodal signal sensing. Electronic skin devices have demonstrated potential for monitoring multiple types of signals, including biological, chemical, and physical sensing, which are crucial for comprehensive human health monitoring. The next step in the development of self-powered electronic skin based on TENG is to integrate these multiple modalities, taking advantage of advancements in neuroscience, the understanding new algorithms, and intelligent devices. This integration will facilitate the perception of multimodal signals and contribute to the development of advanced intelligent electronic skin systems, promoting the adoption of self-powered electronic skin based on TENG in wearable electronic products, intelligent robots, and prosthetic applications.
- Neural interfaces. Neural interfaces have a wide range of application areas, including brain–computer interfaces, brain–robot interfaces, brain–computer interfaces, and so on. High-performance electronic skin based on TENG can enhance human–machine interactions. By attaching electronic skin with various sensing functions to robots or intelligent prosthesis, external signals from the surrounding world can be sensed, creating a more immersive human–machine interaction experience. In the age of big data, real-time information and data can be wirelessly transmitted to users’ mobile devices or computers for processing and analysis, enabling users to monitor their health and surrounding environment in real time. In the coming years, neural interfaces are expected to play an increasingly important role in computer–human interaction as science and technology advance.
Author Contributions
Funding
Conflicts of Interest
References
- Huang, H.; Shen, J.; Wan, S.; Han, L.; Dou, G.; Sun, L. Wet-Adhesive Multifunctional Hydrogel with Anti-swelling and a Skin-Seamless Interface for Underwater Electrophysiological Monitoring and Communication. ACS Appl. Mater. Interfaces 2023, 15, 11549–11562. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Li, J.; Cao, D.; Zhang, G.; Li, J.; Li, K.; Yang, Y.; Wang, W.; Jin, Y.; Sun, R.; et al. Recent Advancements in Flexible and Stretchable Electrodes for Electromechanical Sensors: Strategies, Materials, and Features. ACS Appl. Mater. Interfaces 2017, 9, 12147–12164. [Google Scholar] [CrossRef] [PubMed]
- Ganesh, R.S.; Yoon, H.-J.; Kim, S.-W. Recent trends of biocompatible triboelectric nanogenerators toward self-powered e-skin. EcoMat 2020, 2, e12065. [Google Scholar] [CrossRef]
- Yuan, F.; Wang, W.; Liu, S.; Zhou, J.; Wang, S.; Wang, Y.; Deng, H.; Xuan, S.; Gong, X. A self-powered three-dimensional integrated e-skin for multiple stimuli recognition. Chem. Eng. J. 2023, 451, 138522. [Google Scholar] [CrossRef]
- Wang, R.D.; Feng, S.J.; Wang, Y.Y.; Li, C.Q.; Bu, X.H.; Huang, Y.Z.; He, M.; Zhou, Y.M. A Transparent, and Self-Healable Strain-Sensor E-Skin Based on Polyurethane Membrane with Silver Nanowires. Coatings 2023, 13, 829. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, T.; Li, D.; Ji, S.; Chen, Z.; Shao, W.; Liu, H.; Ren, T.-L. Breathable Electronic Skins for Daily Physiological Signal Monitoring. Nano-Micro Lett. 2022, 14, 161. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Han, S.-T.; Gao, W.; Pan, C. Flexible and Stretchable Strategies for Electronic Skins: Materials, Structure, and Integration. Acs. Appl. Electron. Mater. 2022, 4, 1–26. [Google Scholar] [CrossRef]
- Zou, Z.; Zhu, C.; Li, Y.; Lei, X.; Zhang, W.; Xiao, J. Rehealable, fully recyclable, and malleable electronic skin enabled by dynamic covalent thermoset nanocomposite. Sci. Adv. 2018, 4, eaaq0508. [Google Scholar] [CrossRef]
- Ahmed, Z.; Ahmad, M.; Murshed, M.; Shah, M.I.; Mahmood, H.; Abbas, S. How do green energy technology investments, technological innovation, and trade globalization enhance green energy supply and stimulate environmental sustainability in the G7 countries? Gondwana Res. 2022, 112, 105–115. [Google Scholar] [CrossRef]
- Farhan Bashir, M.; Sadiq, M.; Talbi, B.; Shahzad, L.; Adnan Bashir, M. An outlook on the development of renewable energy, policy measures to reshape the current energy mix, and how to achieve sustainable economic growth in the post COVID-19 era. Environ. Sci. Pollut. Res. 2022, 29, 43636–43647. [Google Scholar] [CrossRef]
- Zakeri, B.; Paulavets, K.; Barreto-Gomez, L.; Echeverri, L.G.; Pachauri, S.; Boza-Kiss, B.; Zimm, C.; Rogelj, J.; Creutzig, F.; Uerge-Vorsatz, D.; et al. Pandemic, War, and Global Energy Transitions. Energies 2022, 15, 6114. [Google Scholar] [CrossRef]
- Zi, Y.; Wang, J.; Wang, S.; Li, S.; Wen, Z.; Guo, H.; Wang, Z.L. Effective energy storage from a triboelectric nanogenerator. Nat. Commun. 2016, 7, 10987. [Google Scholar] [CrossRef]
- Huang, J.; Gu, J.; Liu, J.; Guo, J.; Liu, H.; Hou, K.; Jiang, X.; Yang, X.; Guan, L. Environment stable ionic organohydrogen as a self-powered integrated system for wearable electronics. J. Mater. Chem. A 2021, 9, 16345–16358. [Google Scholar] [CrossRef]
- Zhang, N.; Tao, C.; Fan, X.; Chen, J. Progress in triboelectric nanogenerators as self-powered smart sensors. J. Mater. Res. 2017, 32, 1628–1646. [Google Scholar] [CrossRef]
- Du, K.; Ang, E.H.; Wu, X.; Liu, Y. Progresses in Sustainable Recycling Technology of Spent Lithium-Ion Batteries. Energy Environ. Mater. 2022, 5, 1012–1036. [Google Scholar] [CrossRef]
- He, Y.; Li, S.; Zhou, S.; Hu, H. Mechanical Integrity Degradation and Control of All-Solid-State Lithium Battery with Physical Aging Poly (Vinyl Alcohol)-Based Electrolyte. Polymers 2020, 12, 1886. [Google Scholar] [CrossRef]
- Reddy, M.V.; Mauger, A.; Julien, C.M.; Paolella, A.; Zaghib, K. Brief History of Early Lithium-Battery Development. Materials 2020, 13, 1884. [Google Scholar] [CrossRef]
- Usiskin, R.; Lu, Y.; Popovic, J.; Law, M.; Balaya, P.; Hu, Y.-S.; Maier, J. Fundamentals, status and promise of sodium-based batteries. Nat. Rev. Mater. 2021, 6, 1020–1035. [Google Scholar] [CrossRef]
- Yang, C.; Xin, S.; Mai, L.; You, Y. Materials Design for High-Safety Sodium-Ion Battery. Adv. Energy Mater. 2021, 11, 2000974. [Google Scholar] [CrossRef]
- Yang, M.M.; Kim, D.J.; Alexe, M. Flexo-photovoltaic effect. Science 2018, 360, 904–907. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Tritt, T.M. Advances in thermoelectric materials research: Looking back and moving forward. Science 2017, 357, eaak9997. [Google Scholar] [CrossRef]
- Giunti, C.; Studenikin, A. Neutrino electromagnetic interactions: A window to new physics. Rev. Mod. Phys. 2015, 87, 531–591. [Google Scholar] [CrossRef]
- Covaci, C.; Gontean, A. Piezoelectric Energy Harvesting Solutions: A Review. Sensors 2020, 20, 3512. [Google Scholar] [CrossRef]
- Pan, S.; Zhang, Z. Fundamental theories and basic principles of triboelectric effect: A review. Friction 2019, 7, 2–17. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric Nanogenerators as New Energy Technology for Self-Powered Systems and as Active Mechanical and Chemical Sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Xie, Y.; Wang, S.; Wu, W.; Niu, S.; Wen, X.; Wang, Z.L. Triboelectric Active Sensor Array for Self-Powered Static and Dynamic Pressure Detection and Tactile Imaging. ACS Nano 2013, 7, 8266–8274. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Chen, J.; Zhu, G.; Yang, J.; Bai, P.; Su, Y.; Jing, Q.; Cao, X.; Wang, Z.L. Harvesting Energy from the Natural Vibration of Human Walking. ACS Nano 2013, 7, 11317–11324. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s displacement current for energy and sensors: The origin of nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L.; Jiang, T.; Xu, L. Toward the blue energy dream by triboelectric nanogenerator networks. Nano Energy 2017, 39, 9–23. [Google Scholar] [CrossRef]
- Zhong, J.; Zhang, Y.; Zhong, Q.; Hu, Q.; Hu, B.; Wang, Z.L.; Zhou, J. Fiber-Based Generator for Wearable Electronics and Mobile Medication. ACS Nano 2014, 8, 6273–6280. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wu, C.; Dai, Y.; Zhao, Z.; Wang, A.; Zhang, T.; Wang, Z.L. Achieving ultrahigh triboelectric charge density for efficient energy harvesting. Nat. Commun. 2017, 8, 88. [Google Scholar] [CrossRef] [PubMed]
- Dong, K.; Peng, X.; Wang, Z.L. Fiber/Fabric-Based Piezoelectric and Triboelectric Nanogenerators for Flexible/Stretchable and Wearable Electronics and Artificial Intelligence. Adv. Mater. 2020, 32, 1902549. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Xin, C.; Shen, F.; Gong, Y.; Zi, Y.; Guo, H.; Li, Z.; Peng, Y.; Zhang, Q.; Wang, Z.L. Human body IoT systems based on the triboelectrification effect: Energy harvesting, sensing, interfacing and communication. Energy Environ. Sci. 2022, 15, 3688–3721. [Google Scholar] [CrossRef]
- Zi, Y.; Guo, H.; Wen, Z.; Yeh, M.-H.; Hu, C.; Wang, Z.L. Harvesting Low-Frequency (<5 Hz) Irregular Mechanical Energy: A Possible Killer Application of Triboelectric Nanogenerator. ACS Nano 2016, 10, 4797–4805. [Google Scholar]
- Yang, Y.; Zhang, H.; Lin, Z.-H.; Zhou, Y.S.; Jing, Q.; Su, Y.; Yang, J.; Chen, J.; Hu, C.; Wang, Z.L. Human Skin Based Triboelectric Nanogenerators for Harvesting Biomechanical Energy and as Self-Powered Active Tactile Sensor System. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wang, Z.L. Reviving Vibration Energy Harvesting and Self-Powered Sensing by a Triboelectric Nanogenerator. Joule 2017, 1, 480–521. [Google Scholar] [CrossRef]
- Bai, P.; Zhu, G.; Lin, Z.-H.; Jing, Q.; Chen, J.; Zhang, G.; Ma, J.; Wang, Z.L. Integrated Multi layered Triboelectric Nanogenerator for Harvesting Biomechanical Energy from Human Motions. ACS Nano 2013, 7, 3713–3719. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, Y.; Jia, C.; Wen, Y.; Zhang, Y.; Chu, L.; Zhao, T.; Liu, B.; Mao, Y. Deep-Learning-Assisted Neck Motion Monitoring System Self-Powered through Biodegradable Triboelectric Sensors. Adv. Funct. Mater 2023, 2310742. [Google Scholar] [CrossRef]
- Bai, Z.; Wang, X.; Zheng, M.; Yue, O.; Huang, M.; Zou, X.; Liu, X. Mechanically Robust and Transparent Organohydrogel-Based E-Skin Nanoengineered from Natural Skin. Adv. Funct. Mater. 2023, 33, 2212856. [Google Scholar] [CrossRef]
- Duan, S.; Shi, Q.; Hong, J.; Zhu, D.; Lin, Y.; Li, Y.; Wu, J. Water-Modulated Biomimetic Hyper- Attribute-Gel Electronic Skin for Robotics and Skin-Attachable Wearables. Acs. Nano 2023, 17, 1355–1371. [Google Scholar] [CrossRef] [PubMed]
- Mao, Y.; Wen, Y.; Liu, B.; Sun, F.; Zhu, Y.; Wang, J.; Zhou, A. Flexible wearable intelligent sensing system for wheelchair sports monitoring. iScience 2023, 26, 108126. [Google Scholar] [CrossRef]
- Mudhulu, S.; Channegowda, M.; Balaji, S.; Khosla, A.; Sekhar, P. Trends in Graphene-Based E-Skin and Artificial Intelligence for Biomedical Applications-A Review. IEEE Sens. J. 2023, 23, 18963–18976. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, Y.; Jia, C.; Zhao, T.; Chu, L.; Mao, Y. Advances in self-powered sports monitoring sensors based on triboelectric nanogenerators. J. Energy Chem. 2023, 79, 477–488. [Google Scholar] [CrossRef]
- Zhang, M.; Sun, F.; Wen, Y.; Zheng, Q.; Xie, Z.; Liu, B.; Mao, Y. A self-powered intelligent integrated sensing system for sports skill monitoring. Nanotechnology 2024, 35, 035501. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Q.; Jia, C.; Sun, F.; Zhang, M.; Wen, Y.; Xie, Z.; Zhao, C. Ecoflex Flexible Array of Triboelectric Nanogenerators for Gait Monitoring Alarm Warning Applications. Electronics 2023, 12, 3226. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, T.; Sun, F.; Jia, C.; Ye, H.; Jiang, Y.; Mao, Y. Multi-functional triboelectric nanogenerators on printed circuit board for metaverse sport interactive system. Nano Energy 2023, 113, 108520. [Google Scholar] [CrossRef]
- Li, X.; Zhu, P.; Zhang, S.; Wang, X.; Luo, X.; Leng, Z.; Zhou, H.; Pan, Z.; Mao, Y. A Self-Supporting, Conductor-Exposing, Stretchable, Ultrathin, and Recyclable Kirigami-Structured Liquid Metal Paper for Multifunctional E-Skin. ACS Nano 2022, 16, 5909–5919. [Google Scholar] [CrossRef] [PubMed]
- Ye, L.; Wu, F.; Xu, R.; Zhang, D.; Lu, J.; Wang, C.; Dong, A.; Xu, S.; Xue, L.; Fan, Z.; et al. Face mask integrated with flexible and wearable manganite oxide respiration sensor. Nano Energy 2023, 112, 108460. [Google Scholar] [CrossRef]
- Zheng, S.; Li, W.; Ren, Y.; Liu, Z.; Zou, X.; Hu, Y.; Guo, J.; Sun, Z.; Yan, F. Moisture-Wicking, Breathable, and Intrinsically Antibacterial Electronic Skin Based on Dual-Gradient Poly (ionic liquid) Nanofiber Membranes. Adv. Mater. 2022, 34, 2106570. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, T.; Guan, H.; Zhong, T.; He, H.; Xing, L.; Xue, X. A self-powered temperature-sensitive electronic-skin based on tribotronic effect of PDMS/PANI nanostructures. J. Mater. Sci. Technol. 2019, 35, 2187–2193. [Google Scholar] [CrossRef]
- Liu, Y.; Zhong, J.; Li, E.; Yang, H.; Wang, X.; Lai, D.; Chen, H.; Guo, T. Self-powered artificial synapses actuated by triboelectric nanogenerator. Nano Energy 2019, 60, 377–384. [Google Scholar] [CrossRef]
- Kim, S.R.; Lee, S.; Park, J.W. A skin-inspired, self-powered tactile sensor. Nano Energy 2022, 101, 107608. [Google Scholar] [CrossRef]
- Xiang, S.; Liu, D.; Jiang, C.; Zhou, W.; Ling, D.; Zheng, W.; Sun, X.; Li, X.; Mao, Y.; Shan, C. Liquid-Metal-Based Dynamic Thermoregulating and Self-Powered Electronic Skin. Adv. Funct. Mater. 2021, 31, 2100940. [Google Scholar] [CrossRef]
- Wei, X.; Li, H.; Yue, W.J.; Gao, S.; Chen, Z.X.; Li, Y.; Shen, G.Z. A high-accuracy, real-time, intelligent material perception system with a machine-learning-motivated pressure-sensitive electronic skin. Matter 2022, 5, 1481–1501. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Du, W.; Zhao, Y.; Wang, W.; Pang, L.; Chen, L.; Yu, A.; Zhai, J. Self-powered triboelectric-mechanoluminescent electronic skin for detecting and differentiating multiple mechanical stimuli. Nano Energy 2022, 96, 107115. [Google Scholar] [CrossRef]
- Gao, C.; Tong, W.; Wang, X.; Zhang, Y.; Zhang, Y. Degradable Triboelectric Nanogenerators Based on Chitosan Fibers for Smart Sensing. ACS Appl. Electron. Mater. 2023, 5, 3865–3874. [Google Scholar] [CrossRef]
- Wang, X.; Yin, Y.; Yi, F.; Dai, K.; Niu, S.; Han, Y.; Zhang, Y.; You, Z. Bioinspired stretchable triboelectric nanogenerator as energy-harvesting skin for self-powered electronics. Nano Energy 2017, 39, 429–436. [Google Scholar] [CrossRef]
- Yang, L.; Liu, C.; Yuan, W.; Meng, C.; Dutta, A.; Chen, X.; Guo, L.; Niu, G.; Cheng, H. Fully stretchable, porous MXene-graphene foam nanocomposites for energy harvesting and self-powered sensing. Nano Energy 2022, 103, 107807. [Google Scholar] [CrossRef]
- Lu, Y.; Xiang, H.; Jie, Y.; Cao, X.; Wang, Z.L. Antibacterial Triboelectric Nanogenerator for Mite Removal and Intelligent Human Monitoring. Adv. Mater. Technol. 2023, 8, 2300192. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhu, W.; Lu, X.; Wang, C. Mechanically robust, stretchable, autonomously adhesive, and environmentally tolerant triboelectric electronic skin for self-powered healthcare monitoring and tactile sensing. Nano Energy 2022, 102, 107636. [Google Scholar] [CrossRef]
- Han, X.; Jiang, D.; Qu, X.; Bai, Y.; Cao, Y.; Luo, R.; Li, Z. A Stretchable, Self-Healable Triboelectric Nanogenerator as Electronic Skin for Energy Harvesting and Tactile Sensing. Materials 2021, 14, 1689. [Google Scholar] [CrossRef]
- Peng, X.; Dong, K.; Ye, C.; Jiang, Y.; Zhai, S.; Cheng, R.; Liu, D.; Gao, X.; Wang, J.; Wang, Z.L. A breathable, biodegradable, antibacterial, and self-powered electronic skin based on all-nanofiber triboelectric nanogenerators. Sci. Adv. 2020, 6, eaba9624. [Google Scholar] [CrossRef]
- Li, Y.; Chen, S.; Yan, H.; Jiang, H.; Luo, J.; Zhang, C.; Pang, Y.; Tan, Y. Biodegradable, transparent, and antibacterial alginate-based triboelectric nanogenerator for energy harvesting and tactile sensing. Chem. Eng. J. 2023, 468, 143572. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator! Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Zeng, Y.; Cheng, Y.; Zhu, J.; Ma, P.; Lu, H.; Cao, X.; Wang, Z. Self-powered sensors driven by Maxwell’s displacement current wirelessly provided by TENG. Appl. Mater. Today 2022, 27, 101375. [Google Scholar] [CrossRef]
- Zhang, R.; Olin, H. Material choices for triboelectric nanogenerators: A critical review. EcoMat 2020, 2, e12062. [Google Scholar] [CrossRef]
- Delgado-Alvarado, E.; Martinez-Castillo, J.; Zamora-Peredo, L.; Amir Gonzalez-Calderon, J.; Lopez-Esparza, R.; Ashraf, M.W.; Tayyaba, S.; Herrera-May, A.L. Triboelectric and Piezoelectric Nanogenerators for Self-Powered Healthcare Monitoring Devices: Operating Principles, Challenges, and Perspectives. Nanomaterials 2022, 12, 4403. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Yang, W.; Jing, Q.; Bai, P.; Yang, Y.; Hou, T.C.; Wang, Z.L. Harmonic-Resonator-Based Triboelectric Nanogenerator as a Sustainable Power Source and a Self-Powered Active Vibration Sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef]
- Liu, J.; Cui, N.; Du, T.; Li, G.; Liu, S.; Xu, Q.; Wang, Z.; Gu, L.; Qin, Y. Coaxial double helix structured fiber-based triboelectric nanogenerator for effectively harvesting mechanical energy. Nano Adv. 2020, 2, 4482–4490. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Xie, Y.; Niu, S.; Lin, L.; Wang, Z.L. Freestanding Triboelectric-Layer-Based Nanogenerators for Harvesting Energy from a Moving Object or Human Motion in Contact and Non-contact Modes. Adv. Mater. 2014, 26, 2818–2824. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.; Zhu, Y.; Jia, C.; Ouyang, B.; Zhao, T.; Li, C.; Ba, N.; Li, X.; Chen, S.; Che, T.; et al. A Flexible Lightweight Triboelectric Nanogenerator for Protector and Scoring System in Taekwondo Competition Monitoring. Electronics 2022, 11, 1306. [Google Scholar] [CrossRef]
- Lai, Y.C.; Deng, J.; Niu, S.; Peng, W.; Wu, C.; Liu, R.; Wen, Z.; Wang, Z.L. Electric Eel-Skin-Inspired Mechanically Durable and Super-Stretchable Nanogenerator for Deformable Power Source and Fully Autonomous Conformable Electronic-Skin Applications. Adv. Mater. 2016, 28, 10024–10032. [Google Scholar] [CrossRef]
- Wu, Y.; Luo, Y.; Qu, J.; Daoud, W.A.; Qi, T. Sustainable and shape-adaptable liquid single-electrode triboelectric nanogenerator for biomechanical energy harvesting. Nano Energy 2020, 75, 105027. [Google Scholar] [CrossRef]
- Zhou, K.; Zhao, Y.; Sun, X.; Yuan, Z.; Zheng, G.; Dai, K.; Mi, L.; Pan, C.; Liu, C.; Shen, C. Ultra-stretchable triboelectric nanogenerator as high-sensitive and self-powered electronic skins for energy harvesting and tactile sensing. Nano Energy 2020, 70, 104546. [Google Scholar] [CrossRef]
- Zhu, M.; Liu, J.; Gan, L.; Long, M. Research progress in bio-based self-healing materials. Eur. Polym. J. 2020, 129, 109651. [Google Scholar] [CrossRef]
- Massaro, A. Intelligent Materials and Nanomaterials Improving Physical Properties and Control Oriented on Electronic Implementations. Electronics 2023, 12, 3772. [Google Scholar] [CrossRef]
- Long, Y.; Wang, Z.; Xu, F.; Jiang, B.; Xiao, J.; Yang, J.; Wang, Z.L.; Hu, W. Mechanically Ultra-Robust, Elastic, Conductive, and Multifunctional Hybrid Hydrogel for a Triboelectric Nanogenerator and Flexible/Wearable Sensor. Small 2022, 18, e2203956. [Google Scholar] [CrossRef]
- Cai, Y.W.; Wang, G.G.; Mei, Y.C.; Zhao, D.Q.; Peng, J.J.; Sun, N.; Zhang, H.Y.; Han, J.C.; Yang, Y. Self-healable, super-stretchable and shape-adaptive triboelectric nanogenerator based on double cross-linked PDMS for electronic skins. Nano Energy 2022, 102, 107683. [Google Scholar] [CrossRef]
- Mi, Y.J.; Lu, Y.; Shi, Y.L.; Zhao, Z.Q.; Wang, X.Q.; Meng, J.J.; Cao, X.; Wang, N. Biodegradable Polymers in Triboelectric Nanogenerators. Polymers 2023, 15, 222. [Google Scholar] [CrossRef] [PubMed]
- Gao, C.; Tong, W.; Zhang, Y.; Zhang, J.; Liu, S.; Zhang, Y. The performance of and promotion strategies for degradable polymers in triboelectric nanogenerators. J. Mater. Chem. A 2023, 11, 10065–10094. [Google Scholar] [CrossRef]
- Peng, X.; Dong, K.; Zhang, Y.; Wang, L.; Wei, C.; Lv, T.; Wang, Z.L.; Wu, Z. Sweat-Permeable, Biodegradable, Transparent and Self-powered Chitosan-Based Electronic Skin with Ultrathin Elastic Gold Nanofibers. Adv. Funct. Mater. 2022, 32, 2112241. [Google Scholar] [CrossRef]
- Li, W.; Dong, J.; Zhang, X.; Fan, F.R. Recent Progress in Advanced Units of Triboelectric Electronic Skin. Adv. Mater. Technol. 2023, 8, 2200834. [Google Scholar] [CrossRef]
- Guan, X.; Xu, B.; Wu, M.; Jing, T.; Yang, Y.; Gao, Y. Breathable, washable and wearable woven-structured triboelectric nanogenerators utilizing electrospun nanofibers for biomechanical energy harvesting and self-powered sensing. Nano Energy 2021, 80, 105549. [Google Scholar] [CrossRef]
- Yue, O.; Wang, X.; Liu, X.; Hou, M.; Zheng, M.; Wang, Y.; Cui, B. Spider-Web and Ant-Tentacle Doubly Bio-Inspired Multifunctional Self-Powered Electronic Skin with Hierarchical Nanostructure. Adv. Sci. 2021, 8, 2004377. [Google Scholar] [CrossRef]
- Kar, E.; Ghosh, P.; Pratihar, S.; Tavakoli, M.; Sen, S. Nature-Driven Biocompatible Epidermal Electronic Skin for Real-Time Wireless Monitoring of Human Physiological Signals. ACS Appl. Mater. Interfaces 2023, 15, 20372–20384. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhou, Z.; Sun, L.; Liu, Z.; Xia, X.; Tao, T.H. “Genetically Engineered” Biofunctional Triboelectric Nanogenerators Using Recombinant Spider Silk. Adv. Mater. 2018, 30, e1805722. [Google Scholar] [CrossRef]
- Agnihotri, S.; Mukherji, S.; Mukherji, S. Immobilized silver nanoparticles enhance contact killing and show highest efficacy: Elucidation of the mechanism of bactericidal action of silver. Nanoscale 2013, 5, 7328–7340. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Lou, M.; Yu, J.; Li, Z.; Ding, B. Bioinspired transparent and antibacterial electronic skin for sensitive tactile sensing. Nano Energy 2021, 81, 105669. [Google Scholar] [CrossRef]
- Shi, Y.; Wei, X.; Wang, K.; He, D.; Yuan, Z.; Xu, J.; Wu, Z.; Wang, Z.L. Integrated All-Fiber Electronic Skin toward Self-Powered Sensing Sports Systems. ACS Appl. Mater. Interfaces 2021, 13, 50329–50337. [Google Scholar] [CrossRef]
- Oestlund, B.; Malvezzi, M.; Frennert, S.; Funk, M.; Gonzalez-Vargas, J.; Baur, K.; Alimisis, D.; Thorsteinsson, F.; Alonso-Cepeda, A.; Fau, G.; et al. Interactive robots for health in Europe: Technology readiness and adoption potential. Front. Public Health 2023, 11, 979225. [Google Scholar] [CrossRef]
- Ali, A.; Ashfaq, M.; Qureshi, A.; Muzammil, U.; Shaukat, H.; Ali, S.; Altabey, W.A.; Noori, M.; Kouritem, S.A. Smart Detecting and Versatile Wearable Electrical Sensing Mediums for Healthcare. Sensors 2023, 23, 6586. [Google Scholar] [CrossRef]
- Yu, J.B.; Hou, X.J.; He, J.; Cui, M.; Wang, C.; Geng, W.P.; Mu, J.L.; Han, B.; Chou, X.J. Ultra-flexible and high-sensitive triboelectric nanogenerator as electronic skin for self-powered human physiological signal monitoring. Nano Energy 2020, 69, 104437. [Google Scholar] [CrossRef]
- Peng, X.; Dong, K.; Ning, C.; Cheng, R.; Yi, J.; Zhang, Y.; Sheng, F.; Wu, Z.; Wang, Z.L. All-Nanofiber Self-Powered Skin-Interfaced Real-Time Respiratory Monitoring System for Obstructive Sleep Apnea-Hypopnea Syndrome Diagnosing. Adv. Funct. Mater. 2021, 31, 2103559. [Google Scholar] [CrossRef]
- Gogurla, N.; Kim, S. Self-Powered and Imperceptible Electronic Tattoos Based on Silk Protein Nanofiber and Carbon Nanotubes for Human-Machine Interfaces. Adv. Energy Mater. 2021, 11, 2100801. [Google Scholar] [CrossRef]
- Du, S.; Suo, H.; Xie, G.; Lyu, Q.; Mo, M.; Xie, Z.; Zhou, N.; Zhang, L.; Tao, J.; Zhu, J. Self-powered and photothermal electronic skin patches for accelerating wound healing. Nano Energy 2022, 93, 106906. [Google Scholar] [CrossRef]
- Yin, F.; Guo, Y.; Qiu, Z.; Niu, H.; Wang, W.; Li, Y.; Kim, E.S.; Kim, N.Y. Hybrid electronic skin combining triboelectric nanogenerator and humidity sensor for contact and non-contact sensing. Nano Energy 2022, 101, 107541. [Google Scholar] [CrossRef]
- Iskarous, M.M.; Thakor, N.V. E-Skins: Biomimetic Sensing and Encoding for Upper Limb Prostheses. Proc. IEEE 2019, 107, 2052–2064. [Google Scholar] [CrossRef]
- Mandolesi, L.; Polverino, A.; Montuori, S.; Foti, F.; Ferraioli, G.; Sorrentino, P.; Sorrentino, G. Effects of Physical Exercise on Cognitive Functioning and Wellbeing: Biological and Psychological Benefits. Front. Psychol. 2018, 9, 509. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Zeng, H.; Fu, Y.; Han, W.; Dai, Y.; Xing, L.; Zhang, Y.; Xue, X. A self-powered electronic-skin for real-time perspiration analysis and application in motion state monitoring. J. Mater. Chem. C 2018, 6, 9624–9630. [Google Scholar] [CrossRef]
- Zhao, T.; Zheng, C.; He, H.; Guan, H.; Zhong, T.; Xing, L.; Xue, X. A self-powered biosensing electronic-skin for real-time sweat Ca2+ detection and wireless data transmission. Smart Mater. Struct. 2019, 28, 085015. [Google Scholar] [CrossRef]
- Fu, Y.; He, H.; Liu, Y.; Wang, Q.; Xing, L.; Xue, X. Self-powered, stretchable, fiber-based electronic-skin for actively detecting human motion and environmental atmosphere based on a triboelectrification/gas-sensing coupling effect. J. Mater. Chem. C 2017, 5, 1231–1239. [Google Scholar] [CrossRef]
- Song, L.; Zhang, Z.; Xun, X.; Xu, L.; Gao, F.; Zhao, X.; Kang, Z.; Liao, Q.; Zhang, Y. Fully Organic Self-Powered Electronic Skin with Multifunctional and Highly Robust Sensing Capability. Research 2021, 2021, 9801832. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.P.; Ding, T.Y.; Yuan, Z.H.; Li, R.N.; Wang, B.C.; Wu, Z.Y. Ultrathin Stretchable All-Fiber Electronic Skin for Highly Sensitive Self-Powered Human Motion Monitoring. Nanoenergy Adv. 2022, 2, 52–63. [Google Scholar] [CrossRef]
- Lee, W.W.; Tan, Y.J.; Yao, H.; Li, S.; See, H.H.; Hon, M.; Ng, K.A.; Xiong, B.; Ho, J.S.; Tee, B.C.K. A neuro-inspired artificial peripheral nervous system for scalable electronic skins. Sci. Robot. 2019, 4, eaax2198. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Xiao, L.; Sun, Y.; Zhang, J.; Ma, T.; He, L. A survey of human-in-the-loop for machine learning. Future Gener. Comput. Syst. 2022, 135, 364–381. [Google Scholar] [CrossRef]
- Lee, G.; Son, J.H.; Lee, S.; Kim, S.W.; Kim, D.; Nguyen, N.N.; Lee, S.G.; Cho, K. Fingerpad-Inspired Multimodal Electronic Skin for Material Discrimination and Texture Recognition. Adv. Sci. 2021, 8, 2002606. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Z.; Xu, L.; Gao, F.; Zhao, B.; Ouyang, T.; Kang, Z.; Liao, Q.; Zhang, Y. Fingerprint-inspired electronic skin based on triboelectric nanogenerator for fine texture recognition. Nano Energy 2021, 85, 106001. [Google Scholar] [CrossRef]
- Lin, Y.; Duan, S.; Zhu, D.; Li, Y.; Wang, B.; Wu, J. Self-Powered and Interface-Independent Tactile Sensors Based on Bilayer Single-Electrode Triboelectric Nanogenerators for Robotic Electronic Skin. Adv. Intell. 2023, 5, 2100120. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, T.; Li, Y.; Wei, D.; Tao, B.; Yin, Z.; Zhang, C.; Wu, H. Multidimensional Force Sensors Based on Triboelectric Nanogenerators for Electronic Skin. ACS Appl. Mater. Interfaces 2021, 13, 56320–56328. [Google Scholar] [CrossRef]
- Chen, Y.; Lei, H.; Gao, Z.; Liu, J.; Zhang, F.; Wen, Z.; Sun, X. Energy autonomous electronic skin with direct temperature-pressure perception. Nano Energy 2022, 98, 107273. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, S.; Huang, X.; Guo, W.; Li, Y.; Wu, H. A stretchable dual-mode sensor array for multifunctional robotic electronic skin. Nano Energy 2019, 62, 164–170. [Google Scholar] [CrossRef]
- Li, C.; Zheng, P.; Li, S.; Pang, Y.; Lee, C.K.M. AR-assisted digital twin-enabled robot collaborative manufacturing system with human-in-the-loop. Robot. Comput. Integr. Manuf. 2022, 76, 102321. [Google Scholar] [CrossRef]
- Mao, Y.; Zhu, Y.; Zhao, T.; Jia, C.; Bian, M.; Li, X.; Liu, Y.; Liu, B. A Portable and Flexible Self-Powered Multifunctional Sensor for Real-Time Monitoring in Swimming. Biosensors 2021, 11, 147. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Zhu, Y.; Jia, C.; Zhao, T.; Bian, M.; Jia, C.; Zhang, Y.; Mao, Y. A Self-Powered Portable Flexible Sensor of Monitoring Speed Skating Techniques. Biosensors 2021, 11, 108. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Shen, M.; Mao, L.; Mao, Y.; Ma, H. Self-powered Biosensor Big Data Intelligent Information Processing System for Real-time Motion Monitoring. Z. Anorg. Allg. Chem. 2020, 646, 500–506. [Google Scholar] [CrossRef]
- Dong, K.; Wu, Z.; Deng, J.; Wang, A.C.; Zou, H.; Chen, C.; Hu, D.; Gu, B.; Sun, B.; Wang, Z.L. A Stretchable Yarn Embedded Triboelectric Nanogenerator as Electronic Skin for Biomechanical Energy Harvesting and Multifunctional Pressure Sensing. Adv. Mater. 2018, 30, e1804944. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Zhang, M.; Wang, X.; Jia, C.; Zhang, Y. A Portable and Low-Cost Triboelectric Nanogenerator for Wheelchair Table Tennis Monitoring. Electronics 2022, 11, 4189. [Google Scholar] [CrossRef]
- Lu, Z.; Xie, Z.; Zhu, Y.; Jia, C.; Zhang, Y.; Yang, J.; Zhou, J.; Sun, F.; Mao, Y. A Stable and Durable Triboelectric Nanogenerator for Speed Skating Land Training Monitoring. Electronics 2022, 11, 3717. [Google Scholar] [CrossRef]
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.L.; Cao, C. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots. Nano Energy 2022, 96, 107137. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, Q.; Gan, Y.; Sun, F.; Sun, Z. A Lightweight Sensitive Triboelectric Nanogenerator Sensor for Monitoring Loop Drive Technology in Table Tennis Training. Electronics 2022, 11, 3212. [Google Scholar] [CrossRef]
- Lu, Z.; Wen, Y.; Yang, X.; Li, D.; Liu, B.; Zhang, Y.; Zhu, J.; Zhu, Y.; Zhang, S.; Mao, Y. A Wireless Intelligent Motion Correction System for Skating Monitoring Based on a Triboelectric Nanogenerator. Electronics 2023, 12, 320. [Google Scholar] [CrossRef]
- Delgado-Alvarado, E.; Elvira-Hernandez, E.A.; Hernandez-Hernandez, J.; Huerta-Chua, J.; Vazquez-Leal, H.; Martinez-Castillo, J.; Garcia-Ramirez, P.J.; Herrera-May, A.L. Recent Progress of Nanogenerators for Green Energy Harvesting: Performance, Applications, and Challenges. Nanomaterials 2022, 12, 2549. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Number of Papers about Triboelectric Nanogenerators | Number of Papers about Electronic Skins | Number of Papers about Triboelectric Nanogenerator Based Electronic Skin |
|---|---|---|---|
| 2019 | 652 | 2126 | 65 |
| 2020 | 820 | 2454 | 38 |
| 2021 | 1220 | 2912 | 65 |
| 2022 | 1463 | 3355 | 54 |
| 2023 | 1270 | 2829 | 42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Q.; Wen, Y.; Sun, F.; Xie, Z.; Zhang, M.; Wang, Y.; Liu, D.; Cheng, Z.; Mao, Y.; Zhao, C. Recent Advances in Self-Powered Electronic Skin Based on Triboelectric Nanogenerators. Energies 2024, 17, 638. https://doi.org/10.3390/en17030638
Feng Q, Wen Y, Sun F, Xie Z, Zhang M, Wang Y, Liu D, Cheng Z, Mao Y, Zhao C. Recent Advances in Self-Powered Electronic Skin Based on Triboelectric Nanogenerators. Energies. 2024; 17(3):638. https://doi.org/10.3390/en17030638
Chicago/Turabian StyleFeng, Qingyang, Yuzhang Wen, Fengxin Sun, Zhenning Xie, Mengqi Zhang, Yunlu Wang, Dongsheng Liu, Zihang Cheng, Yupeng Mao, and Chongle Zhao. 2024. "Recent Advances in Self-Powered Electronic Skin Based on Triboelectric Nanogenerators" Energies 17, no. 3: 638. https://doi.org/10.3390/en17030638