Abstract
Considering the need to reduce climate change and energy costs, the possibilities of energy recovery have been sought for many years, even if this should involve significant complexity of the technological process. Attempts to recover energy from a flowing medium containing a large amount of a solid phase are rather rare. This is mainly due to unfavorable erosion and sludge phenomena. The aim of this work is to analyze the possibility of recovering energy from gravity flows in the pipelines of a copper ore enrichment plant. The analysis will be carried out for a system operating in a plant in Poland. An energy recovery device will be designed taking into account the flow of a two-phase medium. For this purpose, flow calculations will be performed. The calculation results obtained for the two-phase flow will be verified based on the experimental results presented in the literature. The simulations will make it possible to determine the power of the designed device.
1. Introduction
Considering the need to reduce climate change and energy costs, the possibilities of energy recovery have been sought for many years, even if this should involve significant complexity in its technological process. The application of a simple system preheating the mine intake air in arctic and subarctic regions is proposed in [1]. The idea is to use waste heat from the exhaust gases of diesel electricity generators. Most often, however, there is a need to cool the mine, which results from the auto-compression of mine air and heat emissions from ore beds and mine machinery. The benefits of reutilizing the water of the bulk air-coolers for mine air pre-conditioning during the wintertime are studied in [2]. The application of dynamic empirical models for mine ventilation purposes brings many benefits [3]. A gravity heat pipe for heat recovery from return air in a mine is analyzed in [4]. The paper presents theoretical guidelines and improvement solutions for practical engineering applications, which are formulated based on the presented numerical calculations. A medium-size excavator is modified and an energy recovery system is introduced in [5]. The proposed system was designed to recover the potential energy of the boom, using a hydraulic accumulator as a storage device. The numerical results show that the designed energy recovery system is able to provide about 9% of mechanical energy. In [6], a new method of magnesium extraction is proposed. Compared to the traditional method, the Mg leaching efficiency increased by 36.42%, the washing time was significantly shortened and the energy consumption was reduced. Energy can also be recovered from waste using processes such as combustion, gasification and pyrolysis [7,8]. Hydrogen is one of the most important green energy sources, although it is difficult to store. The recent developments in the area of photoreactor development are presented in [9]. Cu-based catalysts for H2 production are characterized by various techniques in [10]. Greater energy density in portable proton exchange membrane fuel cell applications can be achieved by using methanol instead of hydrogen as a fuel [11]. In [12], the authors present a turbine which, when installed, does not reduce the mass flow rate in the treated sewage water distribution line. The turbine power is determined using computational fluid dynamics (CFD). The energy potential of water supply systems is determined in [13]. The analyses take account of hydropower recovery and thermal recovery. The proposed method can be applied for hydroelectricity production, as well as for heat and cold recovery. The authors of [14] present the use of a propeller-driven pyroelectric turbine to recover approximately 10% of the energy needed to pump water through the filtration system in an existing building. Energy recovery by means of water turbines at the outlets of wastewater treatment plants is proposed in [15]. A comparison between a system consisting of a hybrid Pump-As-Turbine (PAT) and a pilot solar system with a traditional diesel generator in an off-grid farm in southern Spain is shown in [16]. The PAT was installed on a bypass to ensure continuous operation of the irrigation network. It only represented a maximum of 8% of the total cost of the environmental protection system.
Much less frequent attempts are made to recover energy from a medium containing a solid phase. The presence of solids causes erosion, which makes operation difficult, and the amount of energy that can be captured from the flowing multiphase mixture is smaller compared to the single-phase flow [17,18]. The aim of this work is to analyze the possibility of recovering energy from gravity flows occurring in the pipelines of a copper ore enrichment plant. The analysis will be carried out for a system operating in a plant in Poland. An energy recovery device will be designed taking into account the flow of a two-phase medium. For this purpose, flow calculations will be performed.
The literature offers a great many examples of numerical research focused on determining the power output of water turbines and on the analysis of flows through pipelines, particularly in single-phase simulations, predominantly concerning water flows. However, there are fewer publications addressing two-phase flows with a small amount of the solid phase. With regard to water turbines, the most common investigations revolve around studying the impact of the solid phase on erosion in pipeline components or turbine blades. The authors of [18] present a simulation of the Pelton turbine with the flow of solid particles suspended with the solid phase maximum volume concentration of 2% only. However, it is challenging to find, in the literature, examples of simulations of water turbines within pipelines where the suspension concentration exceeds 50%. The numerical models for such scenarios still need more adequate validation; they are often limited to very basic geometries, such as flows through a pipe with bends.
When it comes to numerical models for multiphase simulations, several approaches can be distinguished. The Lagrangian method analyzes the motion of each solid-phase particle as a point with a certain mass. In this approach, there are no collisions between particles because they are simulated as points. In [19], the researchers show that the results obtained using the Lagrangian approach are worse compared to the Eulerian approach, and the simulation time is longer for the latter. This method can be applied in flows with a volume concentration of up to 10%. An extension of the Lagrangian method is the Discrete Element Method. In this approach, physical particles are simulated, each with its own mass and diameter. It is the most accurate method for modeling the dispersed solid phase in a liquid, but it becomes computationally expensive at a significant number of particles [20,21]. On the other hand, Eulerian approaches to multiphase-flow modeling can be distinguished further. If the phases are immiscible and there is a large multiphase surface area, the Volume of Fluid (VOF) method can be applied [22]. Various turbulence models are also tested in this work. If the phases are dispersed among each other, the Two Fluid Model (TFM) should be used instead of the VOF method [17,20,23,24,25].
The TFM approach makes use of a closure model, utilizing the kinetic theory of granular flows with solid particles. This model incorporates parameters such as the solid phase stress, the interphase momentum transfer, the interactions between particles and between particles and the continuous medium. An accurate prediction of multiphase flows with the use of this model relies heavily on the interphase frictional force. It is this force that shapes the velocity field and relative velocities between phases.
This article will present the validation of the Two Fluid Model based on experimental data for a straight pipe and a pipe with a bend. Subsequently, for the designed turbine structure, single and multiphase simulations will be performed using the TFM.
2. Visual Inspection
The purpose of the site visit was to select a location for the energy recovery device and to obtain the necessary data. Information was obtained regarding the operating hours of this part of the installation from the day of its construction to the on-site inspection. On this basis, the average percentage of the installation’s operational time was determined. Measurements were made of the maximum height difference and the distance of the pipeline from other elements of the system. Diameters, thicknesses and fragments of the external geometry of the pipeline were also measured to verify the received technical documentation. Laser distance meter KRT706500 with an accuracy of 2 mm and thickness gauge PCE-TG 75 with an accuracy of ±0.5% of the measured value were used to determine the pipeline geometry. The uncertainty analysis should include the uncertainty of the experimenter caused by increased humidity and high dustiness of the building area.
The lower section of the outflow pipeline, which is shown in Figure 1, was chosen as the installation site for the energy recovery device. The location of the proposed energy recovery device is shown in Figure 2. The selected location allows for the use of a piping system that bypasses the energy recovery system. The purpose of the so-called bypass is to ensure the continuity of operation of the installation in the event of a failure or service of the energy recovery system. Additionally, the bypass protects the energy recovery system against damage during its start-up.
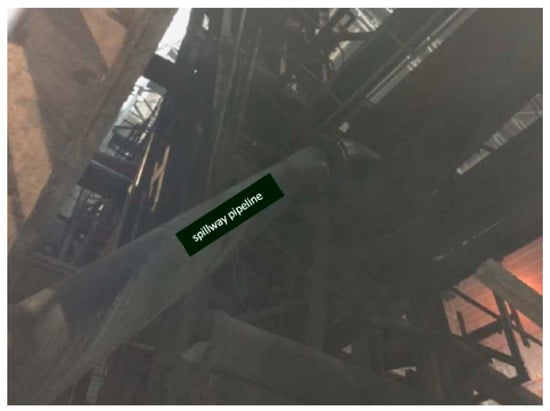
Figure 1.
Outflow pipeline.
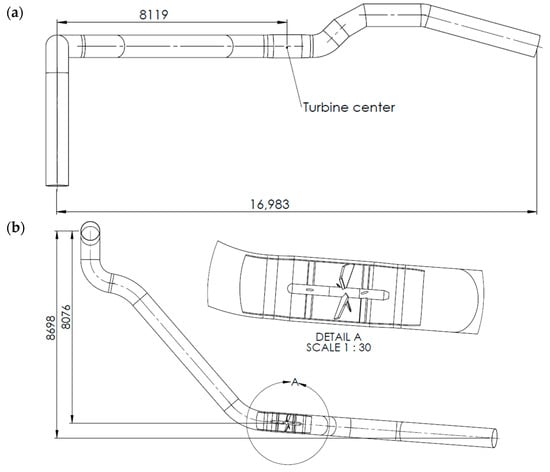
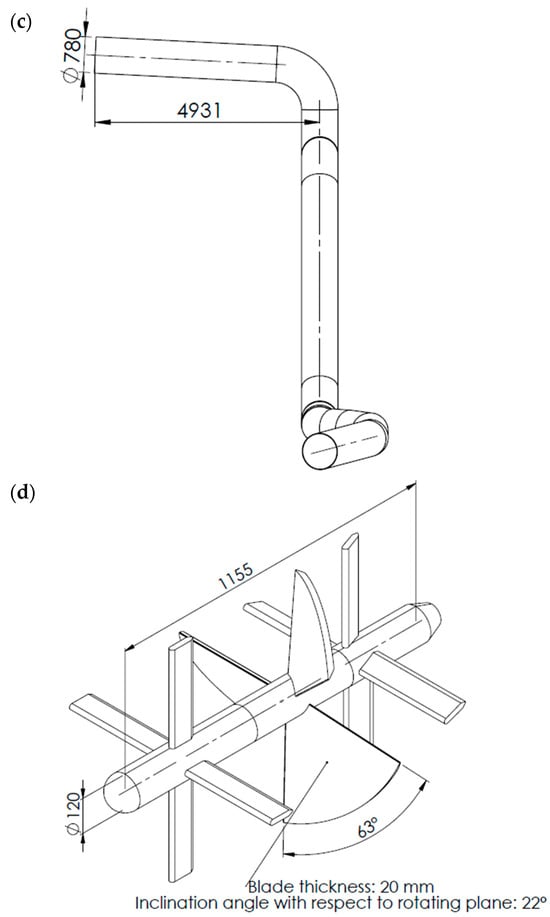
Figure 2.
Pictorial view: (a) top view and (b) side view, with an opening to show the installed turbine; (c) front view and (d) isometric view of the turbine with basic dimensions.
A decision was made then to design an inexpensive, simple prototype of a turbine. The assumption is that the rotor wear and tear will proceed quickly due to strong friction, causing considerable erosion of the blades. Figure 2 presents the pipeline with the proposed turbine consisting of three blades, the shaft casing and eight stationary blades upstream and downstream of the rotor, all of which make up the supporting structure of the proposed solution. The turbine was installed in the lower section of the pipeline. Elements of the designed device that are in contact with the medium flowing in the pipeline, with a significant relative flow velocity in the boundary layer, must be covered with coatings of wear-resistant materials to protect against excessive wear resulting from erosion/abrasion. As part of the work carried out, two groups of wear-resistant materials suitable for use in this application were selected: wear-resistant coatings made of polyurethane (PU) and wear-resistant coatings made of silicon carbide (SiC).
3. Mathematical Model
The continuous and the dispersed phase in a multiphase flow will be described using the Eulerian two-phase model. In this model, space can be occupied only by one phase. Based on that, the concept of volume fraction of phase i is introduced
where is the volume of phase i [m3].
The laws of mass and momentum conservation are written and solved individually for each phase i. The continuity equation for phase i has the following form
where is phase i density [kg/m3], is phase i velocity [m/s] and is time [s].
The general form of the momentum conservation principle in fluid dynamics is described by Equation (3). In the analysis of the single-phase flow, the changes in momentum of a fluid element depend only on gravitational forces, external pressure and internal viscous forces within the fluid. These forces can be divided into body forces per unit volume , exemplified by the gravitational force, and stresses σ, exemplified by the fluid pressure or shear stresses caused by the fluid viscosity:
For a fluid, the stress tensor is often written as the sum of normal stresses and shear stresses, given by Equation (4).
where is pressure [kg/m·s2]; is the viscous shear stress tensor [kg/m·s2].
Equation (3) can be written for each of the phases involved.
where is gravitational acceleration [m/s2]; is the liquid–solid phase interphase momentum exchange coefficient [kg/(m3s)]; is the virtual mass force coefficient [21], set as 0.5 [-]; is the lift force coefficient, set as 0.25 [-]; is the liquid phase stress tensor [kg/m·s2]; is the solid phase stress tensor [kg/m·s2] and the subscript i indicates the phase (i = l liquid or i = s solid).
The first term on the right side of Equations (5) and (6) represents surface forces associated with pressure. The second terms represent shear stresses induced by the fluid viscosity. The third terms represent the body forces resulting from gravitational interaction. The subsequent terms describe the interactions between the phases being described. In the fourth terms, there are the so-called interphase drag forces, which influence the slip and relative velocity of each phase. The next forces (terms 5) are associated with acceleration. The inertia of the surrounding fluid affects the acceleration rate of a particle submerged in the flow. In the inviscid flow theory, this effect can be shown as “virtual mass” or “added mass”. The final, sixth components relate to the lift forces. In situations where the continuous phase flow field exhibits non-uniform or swirling characteristics, particles within the flow experience a phenomenon known as the lift force. This lift force is perpendicular to the direction of the relative velocity between the particles and the surrounding fluid.
The interphase drag coefficient is determined as follows [20]:
where is the liquid dynamic viscosity [kg/(m·s)]; is the solid particle mean diameter [m]; is the transition volume fraction, set as 0.2 [-]; is the particle drag coefficient [-].
Next, the particle drag coefficient was calculated using the following formula [20]:
where is the particle phase Reynolds number defined as
The solid phase stress tensor is expressed as
where is the solid phase bulk viscosity [kg/(m·s)]; is effective granular viscosity [kg/(m·s)]; and is the identity tensor [-].
Two regimes of the solid phase flow are possible: kinetic and frictional. The kinetic regime occurs below the concentration limit , which for spherical particles is 0.624. In the kinetic regime, collisions of particles dominate in the flow and behave like an ideal gas in the kinetic theory of gases. On the other hand, if the movement is primarily influenced by contact between particles (close to the concentration ), empirical formulae borrowed from the field of soil mechanics are employed [26].
Two regimes were included in this paper. Below critical volume concentration with the value of 0.55, the kinetic regime was activated and the solid phase bulk viscosity in Equation (10) was calculated using the following formula [27]
where is the particle radial distribution function [-]; is the granular temperature [m2/s2]; and is the restitution coefficient, with a value of 0.9 [-].
Next, the particle radial distribution was calculated using Equation (12):
In the kinetic regime, effective granular viscosity was computed as a sum of collisional and kinetic contributions
The collisional term was calculated using the following equation [28]:
while the kinetic term is expressed as
Granular temperature can be computed using the granular energy transport equation:
where is the effective granular diffusion coefficient [m/s]; is the dissipation of granular energy [m2/s3]; is the dissipation of granular energy due to the interphase drag [m2/s3]; and is the dissipation rate of the solid phase turbulent kinetic energy [m5/kg·s3].
The effective granular diffusion coefficient is defined as
where is the granular diffusion coefficient [m/s]; is the solid phase turbulent viscosity [kg/(m·s)] and is turbulent granular diffusion, with a value of 1.0 [kg/m2].
The granular diffusion coefficient takes the following form [28]:
The dissipation of granular energy can be expressed as
The dissipation of granular energy due to the interphase drag was calculated using the following formula:
Above the critical value of volume concentration , the frictional regime was activated and the solid phase bulk viscosity was set as 0 in Equation (10) [26]. Then, the solid pressure term in this equation was calculated using the following formula:
where is a constant with a value of 0.05 [kg/m·s2]; is a constant with a value of 2.0 [-] and is a constant with a value of 5.0 [-].
Then, in the frictional regime, effective granular viscosity in Equation (10) is equal to frictional viscosity defined as
where is the internal friction angle with the value of 28.5°; is the strain rate tensor [s−1] and is the maximum solid viscosity, with a value of 1000 [kg/(m·s)].
The turbulence modeling process involved the application of the realizable turbulence model independently for each phase. This approach enabled a comprehensive analysis of the turbulence behavior within the fluid system under consideration. The Simcenter Star CCM+ version 2210 [29] software facilitated various tasks, including the mesh generation, the simulation performance and the post-simulation analysis.
It is noteworthy to emphasize that all computations were executed under steady-state conditions, leveraging the capabilities of the SIMPLE solver, also known as the Segregated solver within the software framework. By choosing this solver, efficient convergence and stability were ensured throughout the simulation process. Furthermore, the equations were discretized using second-order schemes, enhancing the accuracy of numerical solutions while maintaining computational efficiency. Multiphase flows with the liquid and the solid phase are not an easy task in terms of convergence.
To obtain the simulation solution in a multiphase simulation, the following under-relaxation factors (URFs) were selected:
- -
- Explicit URF for velocity: 1.0;
- -
- Implicit URF for velocity: 0.15;
- -
- Pressure: 0.15;
- -
- Explicit URF for volume fraction: 1.0;
- -
- Implicit URF for volume fraction: 0.2;
- -
- Granular temperature: 0.5;
- -
- turbulence: 0.4;
- -
- turbulent viscosity: 0.5.
The calculations were performed using a dedicated Prometheus computing cluster located at the Academic Computer Center Cyfronet AGH. A node consisting of 256 cores was used for the calculations. Regarding the simulations of the pipeline with the proposed turbine, for the single-phase simulation, the average computation time and number of iterations were 20 min and 1800 iterations. For the multiphase simulation, considering the slurry, the average computation time was 4.5 h and 140,000 iterations (the effect of the low value of URF coefficients of most equations).
4. Validation of the Numerical Approach
The flow of the liquid phase with the solid phase in the pipeline under consideration was analyzed numerically. The first part of this section presents experimental verification of the numerical model based on the flow through a straight pipe [30] and through a pipe with a 90° knee [17,24]. The numerical model verification started with the flow through a straight pipe [17,30]. The pipe length was 100·D, as shown in Figure 3. The diameter D = 0.130 m.
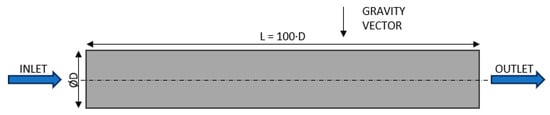
Figure 3.
Verification of the numerical model on a straight section of the pipeline.
Next, discretization was performed on this geometry using a polyhedral mesh. The polyhedral mesh type was selected considering that the combination of the pipeline with the proposed turbine intended for energy recovery had a rather complex structure difficult to represent using a hexahedral mesh. The mesh density was modified using only one parameter, referred to as “Base Size”. In every mesh, the number of inflation layers was set to 6, and the coefficient of their growth rate from layer 1 was set to 1.2. Three meshes were generated to assess the impact of the concentration of the cells on quantitative results (here: the pressure drop between the inlet and the outlet). Figure 4 presents the computational mesh visualization for three different settings of the mesher. The number of the generated elements totaled 0.3 M, 0.7 M and 1.5 M.
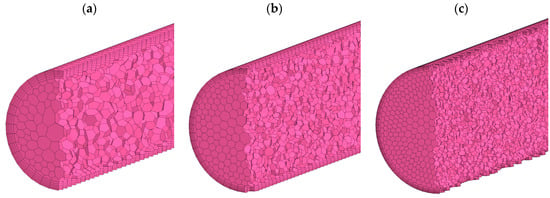
Figure 4.
Visualization of the computational mesh for 3 concentrations: (a) coarse mesh; (b) medium mesh; (c) fine mesh.
Next, the boundary conditions were assumed. At the inlet, velocity was assumed as 1.0, 2.0, 3.0, 4.0, 5.4 and 6.0 m/s for the liquid phase and the suspension, and the suspension volume fraction was assumed as 0.4. In all simulations conducted in this work, no special velocity profile was assumed at the inlet. Each cell had exactly the same velocity value. Moreover, it was assumed in the context of two-phase flows that the mixture at the inlet was homogeneous. A gravitational vector was assumed in the direction perpendicular to the flow, with a value of 9.81 m2/s. The density of the water and sand making up the suspension was adopted as 998.2 and 2650.0 kg/m3, respectively. The diameter of the sand grains was set as 2.7 × 10−4 m [17,30].
After the simulations, the first to be presented was the correlation of the suspension content Cs at a given relative height zn. The relative height was defined as the quotient of the vertical coordinate and the pipe diameter zn = z/D, where 0 means the pipe bottom and 1 is the pipe top. The distribution was measured at length L = 100·D from the inlet. The chart presents the results for three meshes compared to experimental data [30].
The chart in Figure 5 shows good correlation for points located below a relative height zn = 0.77. The error level does not exceed 10%. Analyzing the impact of the computational mesh on the vertical distribution of the suspension, it can be seen that the MEDIUM and FINE meshes give practically the same results, whereas the COARSE mesh type displays only a slight difference in the distribution compared to the MEDIUM and FINE meshes.
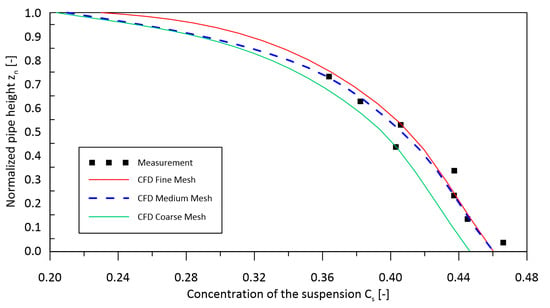
Figure 5.
Distribution of the suspension content Cs at the pipe outlet measured along normalized height zn.
The next chart in Figure 6 presents the pressure gradient defined as Δp/L depending on the inlet velocity v. The pressure drop was calculated as the difference in total pressures between the pipe inlet and outlet.
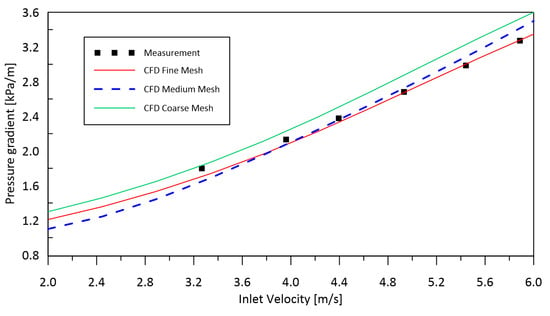
Figure 6.
Pressure gradient depending on inlet velocity.
In Figure 5 and Figure 6, it can be seen that all the meshes show good convergence in terms of the order of magnitudes and goodness of fit to experimental data. The COARSE-type mesh differed slightly from the MEDIUM and FINE meshes, which showed very good convergence in terms of values. Based on the charts presented, it was decided that the sizing generated for the MEDIUM-type mesh was sufficient to perform further simulations (flow through the pipe with a knee and through the system with the turbine).
Then, on a few selected sections, the sand volume fraction was presented graphically (cf. Figure 7). The sections were created, respectively, for 0.0, 0.25, 0.5, 0.75 and 1.0 of the pipe relative length x/L, where x was the length coordinate.
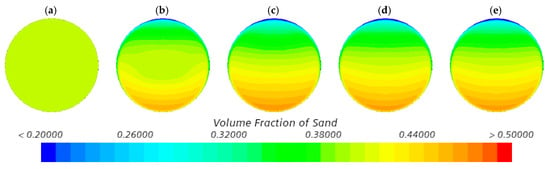
Figure 7.
Fractional distribution for the suspension for sections at (a) 0.0, (b) 0.25, (c) 0.5, (d) 0.75 and (e) 1.0 of the relative length.
The above-presented distributions of the suspension content in individual sections illustrate the course of the sedimentation phenomenon. Starting from relative length x/L = 0.5, considerable separation of layers and sand sedimentation can be observed on the pipe’s lower part due to gravitation. Figure 7e shows the suspension distribution at the pipe outlet. It can be noticed that in the pipe’s upper part, there is no sudden growth in the suspension concentration, as shown by the measurement results presented in Figure 5.
The next stage of the verification was to determine correlations for the flow through a pipe with a 90° bend [24]. In this case, the diameter was D = 0.053 m, the bend radius was R = 0.1488 m, and the total length of the pipe with the bend was 7.234 m.
The mesh generated for this pipe was similar to the MEDIUM-type mesh for the straight pipe, as shown in Figure 4b. The mesh is visualized in Figure 8 below.
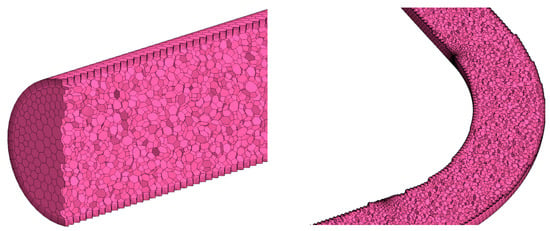
Figure 8.
Computational mesh for the pipe with a knee.
In this verification, one velocity of the suspension at the inlet was simulated −3.56 m/s. The sand volume content was assumed at the level of 0.0882 [24]. Gravitation was taken into account in the simulation. The density of the water and sand making up the suspension was adopted as 998.2 and 2650.0 kg/m3, respectively. The diameter of the sand grains was set as 4.5 × 10−4 m [17,24].
After the simulations, the suspension normalized content was presented: Csn = Cs/Cs,i, where Cs,i is the suspension content at the inlet, totaling 0.0882 [24]. Normalized height zn is defined in the same way as for the straight pipe. The measurements were performed for the three sections (C1, C2 and C3) marked in Figure 9.
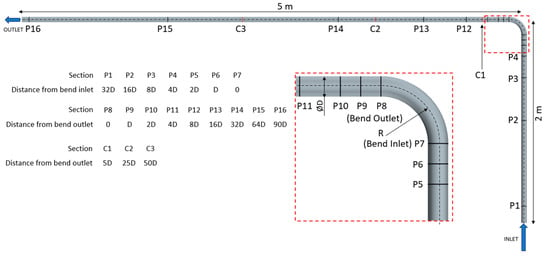
Figure 9.
Geometry of the pipe with a knee used for the verification [24].
The figures presented above show fairly good correlations. The general trend in the suspension distribution has been preserved. Figure 10a–c for zn lower than 0.4 show much worse goodness of fit compared to values higher than 0.4. Globally, however, the simulations predicted the forming velocity field in a two-phase flow quite well.
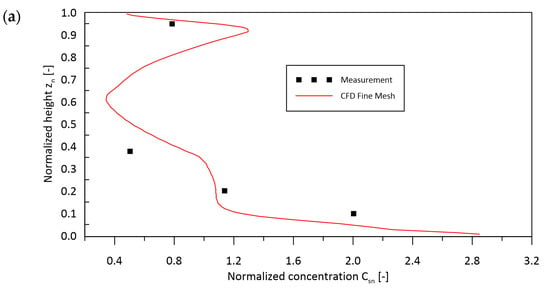
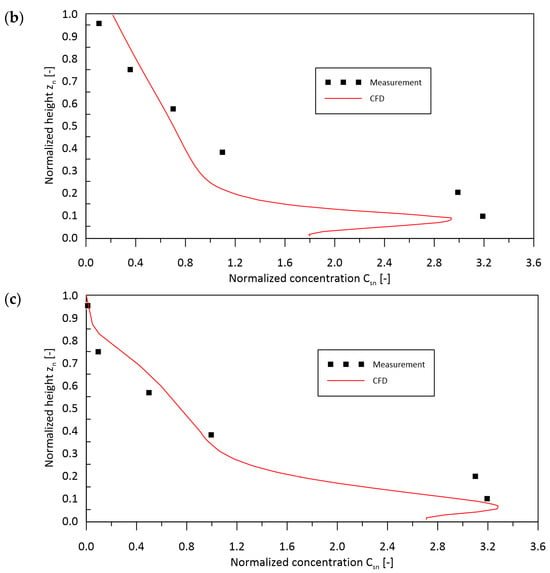
Figure 10.
Distribution of the suspension normalized content Cs at the pipe outlet measured along normalized height zn; (a), (b) and (c) present results for sections C1, C2 and C3, respectively.
The next verification was prepared for the pressure drop. In this case, the pressure drop was determined based on measuring points P1–16 presented in Figure 9. The chart presents the normalized pressure drop Δpn = Δp/(ρv2/2) as a function of the distance from point P1. Pressure at point P1 was adopted as the reference pressure. The correlation is presented in the figure below.
As presented by the chart in Figure 11, the correlation is very good. Relative errors are less than 10% for all the measuring points. Slight deviations appear for pressure drops measured in the bend area, which is due to local losses and eddies within the bend. The next figure illustrates the suspension distribution in a few selected sections of the pipe with a bend. The following sections were selected: the pipe inlet, the bend inlet, the middle of the bend arc length, the bend outlet, and the section for point P15, based on Figure 9.
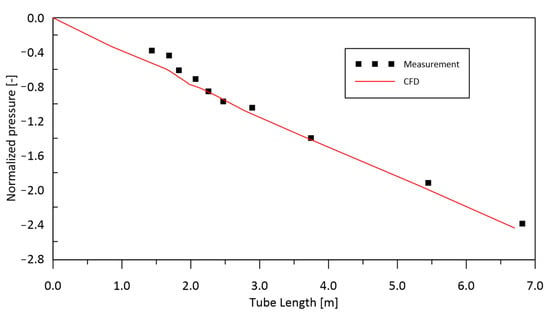
Figure 11.
Normalized pressure drop depending on distance from measuring point P1.
Figure 12 shows that the heavier fraction, sand in this case, is subject to sedimentation upstream of the bend due to gravity (Figure 12b), then under the influence of the resultant force of gravity and the centrifugal force, it is pressed into the lateral outer wall of the pipe (Figure 12c,d), to finally settle at the pipe bottom wall again due to gravitation, with the separation of layers in the flow (Figure 12e).
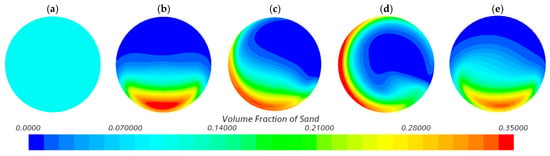
Figure 12.
Suspension volume fraction in individual sections: (a) pipe inlet, (b) bend inlet (P7), (c) middle of the bend arc length (bend center), (d) bend outlet (P8), (e) section for point P15.
Summing up this section of the paper, both cases the suspension flow through a straight pipe and the flow through a pipe with a bend show that the defined mathematical model correlates well with the experimental data and can be applied for the suspension flow through a pipeline, where changes occur in the flow direction.
5. Numerical Simulation of a Pipeline with a Turbine
This section presents simulations of a pipeline with a turbine using the single- and the two-phase approach. The main goal here was to make a quantitative comparison of the pressure drop, efficiency and power for a pipeline with pure water and with a mixture of water with sand. In each approach, the inlet velocity and a boundary condition of the pressure outlet type were assumed. The velocities were selected to establish a point at which the turbine efficiency began to be higher than zero, and then find the maximum point to see how high efficiency would be when this maximum point were crossed. The single-phase simulation was performed without taking account the gravity equation as it has no impact on the solution of the system of equations. The so-called multiple reference frame approach was adopted into the rotational domain, with the rotational speed adopted at 60 rpm (the rotational speed adopted while selecting the angle of incidence of the blades). The accuracy of the proposed method was previously tested using Laser Doppler Anemometry [22]. For the multiphase analysis, the inlet volume contents of water and of the solid phase were assumed with their respective values defined as 0.487 and 0.513. The grain average size in the suspension was adopted as 5 × 10−4 m. The water and the solid phase density were assumed as 998 kg/m3 and 2660 kg/m3, respectively. In addition to sand, the solid phase also included copper ore fractions. Figure 13 presents a visualization of the boundary conditions in the pipeline under analysis.
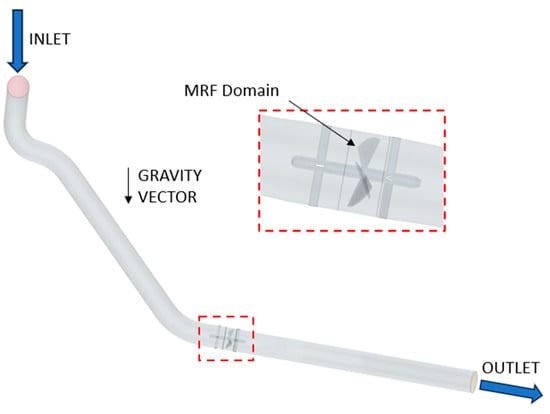
Figure 13.
Computational domain.
The geometry was then discretized using a polyhedral mesh (cf. Figure 14). The same settings were applied as for the MEDIUM-type mesh in the straight pipe. Additionally, the mesh was made denser in the area of the blades, as this is where key flow phenomena, such as layer separation, secondary vortices and large velocity gradients occur. These phenomena have an impact on the momentum transfer from the fluid to the rotor, and simulating them correctly is crucial for the analysis accuracy.
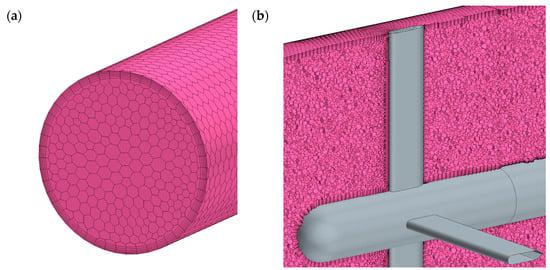
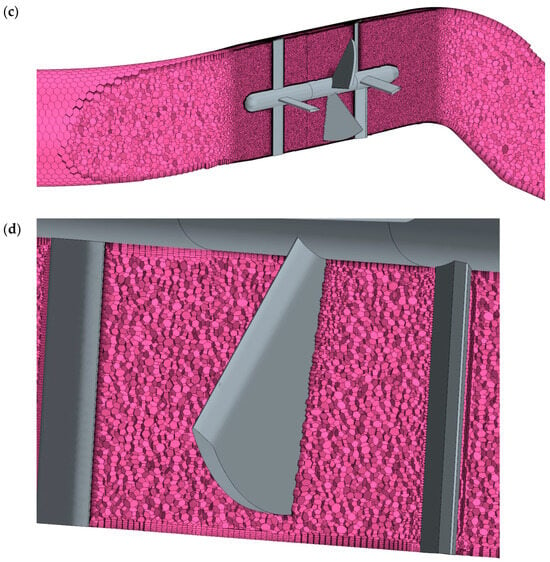
Figure 14.
Pipeline and turbine discretization using a polyhedral mesh: (a) pipeline inlet, (b) denser mesh in the area of the shaft casing inlet part, and (c) denser mesh in the turbine area; (d) view of the rotor blade.
Using Equation (23), a chart was made showing the turbine efficiency based on the quantitative data gathered after the simulations performed for both cases, i.e., the single- and the two-phase approach (cf. Figure 15). The chart indicates that the efficiency for the flow with the suspension was more than 20% lower for the turbine maximum working point compared to the single-phase flow. The optimal output for the designed turbine in the slurry flow was about 0.6 m3/s. Moreover, the point of maximum efficiency was shifted toward a higher volume output, and the characteristic curve of the useful operating range was much narrower.
where M—moment on the turbine [N·m], —angular velocity [rad/s], —volume output [m3/s], —total pressure upstream of the turbine and [Pa] —total pressure downstream of the turbine [Pa].
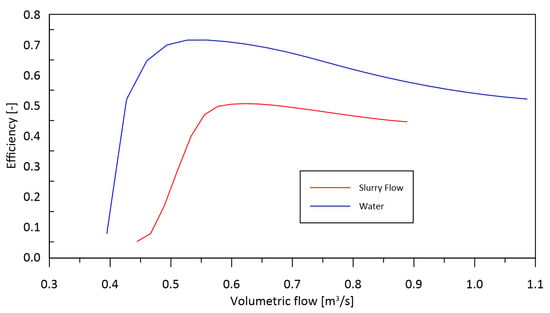
Figure 15.
Chart illustrating the turbine efficiency measured in the pipeline depending on the volume output and presented for the single- and the two-phase simulation.
Moment M acting on the turbine is expressed by Equation (24):
where rf—is position of the cell’s face relative to origin of coordinate system describing the MRF, —pressure force [N/m2], —shear force [N/m2], and —vector describing the revolving axis used in MRF; subscript f indicates the cell’s face.
Next, calculations were made of the pressure drops measured from the inlet to the outlet in the pipeline. The results are presented in the form of the height of the liquid column in Figure 16 according to Equation (25), where the densities of the water and of the suspension were adopted as 998.2 and 1850.6 kg/m3, respectively. These drops are necessary to calculate the power that the turbine is able to generate depending on the volume output, taking account of flow-related pressure losses. As indicated by the chart, the pressure drops for the slurry flow are by more than 1.2 m bigger compared to the flow of pure water. For the optimal point, the pressure drop totalled 1.42 m for the slurry flow.
where is the difference in pressure drops between the pipeline inlet and outlet [Pa], g is gravitational acceleration [m/s2] and is the fluid density [kg/m3].
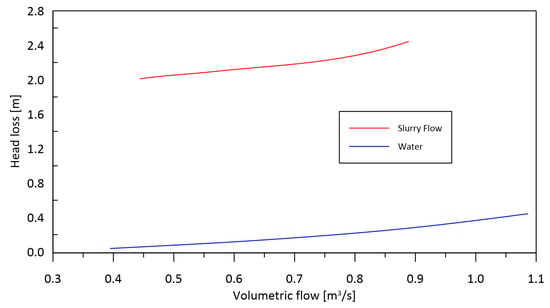
Figure 16.
Pressure losses expressed in the form of the height of the liquid column for the single- and the two-phase flow.
Formula (26) was then used to calculate mechanical power that the turbine is able to generate depending on the output, efficiency and flow-related losses. The power is presented in Figure 17. For the optimal efficiency in the slurry flow, power totaled 36,590 W, whereas for the same output for pure water it is 37,878 W. Despite the lower efficiency for the slurry flow and higher flow losses, power is compensated for owing to the almost twice higher density of the medium.
where is the difference in the height of the liquid column expressed in meters.
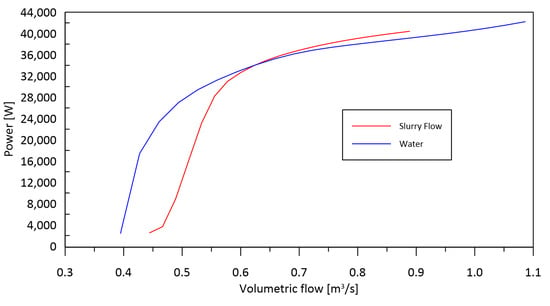
Figure 17.
Changes in the turbine power for the single- and the two-phase flow depending on the volume output.
The next step was to present a 3D visualization of the suspension concentration in the entire pipeline (cf. Figure 18) for the optimal working point, i.e., for the output of 0.6 m3/s. The distribution illustrates how the liquid phase and the solid phase behave depending on the pipeline inclination angle, the bends on the flow path and the rotor (cf. Figure 19). The solid phase separation can be seen on the bends upstream of the turbine. By its rotation, the turbine pushes the suspension into the upper part of the pipe. Due to the gravitational force, sand sedimentation re-occurs in the pipe lower part.
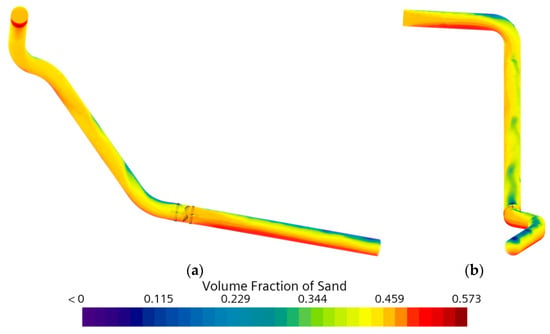
Figure 18.
Visualization of the suspension concentration in the pipeline: (a) side view; (b) front view.
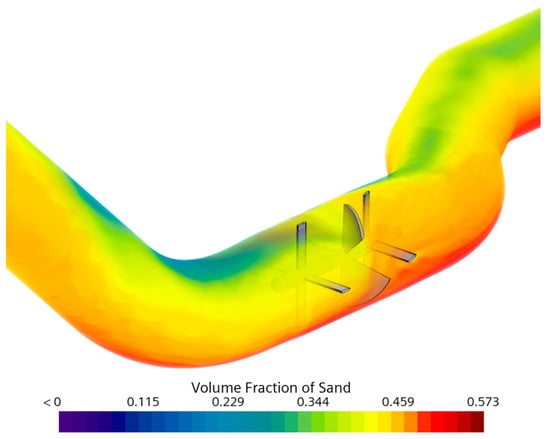
Figure 19.
Three-dimensional visualization of the suspension concentration in the pipeline—close-up of the turbine area.
A close-up of the turbine area is presented below to show the behavior of the solid phase more accurately. It can be seen how the rotating rotor sweeps away the sand and pushes it into the upper part of the pipe.
The suspension distribution is shown in the figure below in sections S1 and S2 to illustrate the behavior of the suspension in the pipe section (Figure 20). Section S1 shows the separation of layers in the mixture due to the centrifugal force acting in the bends and due to gravitation, whereas section S2 shows the sand ejection toward the pipe top wall due to the impact of the rotor.
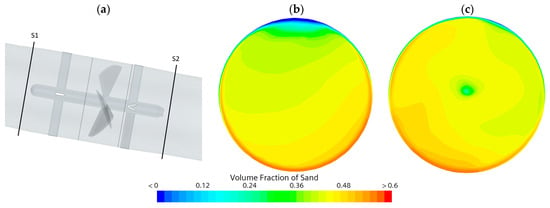
Figure 20.
Distribution of the suspension in sections S1 and S2: (a) visualization of the sections, (b) section S1, and (c) section S2.
Figure 21 below presents a three-dimensional visualization of the velocity field using streamlines. The velocity is defined by Equation (27) and presents the weighted average for the solid and the liquid phase, where the weights are volume fractions of the phases.
where is the water content [-], is the velocity vector for the liquid phase [m/s], is the sand content and is the velocity vector for the solid phase [m/s].
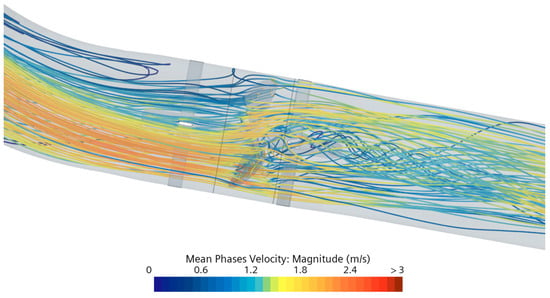
Figure 21.
Velocity field visualization illustrated by streamlines in the turbine.
Figure 22 shows the distribution of the y+ parameter on the surfaces that compose the turbine’s construction. The graph is shown for pure water flow through the pipeline for a flow rate of 0.6 m3/s. Classically, this value should oscillate around y+ = 1. However, achieving such a low value would involve a very large number of elements in the wall layer, which would increase the size of the computational grid considerably. In addition, the All+ Wall Treatment in the turbulence model in all simulations was used [31]. This means that the values presented in Figure 22 were acceptable values for this turbulence model.
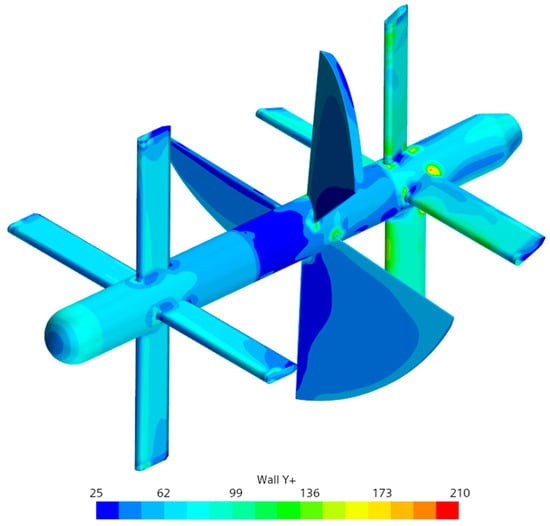
Figure 22.
Distribution of the y+ parameter on the surface of the turbine.
Summing up, a simple-structure turbine used in the pipeline under analysis makes it possible recover more than 35 kW of power for the optimal working point. A problem that remains is the solution lifetime. However, considering the costs of the replacement of the blades, which are not expensive to make, the system may bring financial benefits from the recovery of electric energy.
6. Conclusions
This paper presents an idea of a simple turbine solution to recover mechanical energy from a pipeline with a slurry flow involving a high concentration of sand. The efficiency of the mechanical energy recovery was evaluated using CFD. The numerical model of the turbine was verified against experimental data for both a straight pipe and a pipe with a knee. The analysis of the results, including sand concentration distributions and pressure drops, indicates that the numerical model simulated the turbine behavior well compared to experimental data. This suggests that the model is suitable for predicting the turbine efficiency.
Further research involved simulating both pure water and slurry flows through the turbine. It turned out that despite a 20% lower efficiency of the turbine at the flow with a sand suspension, the powers obtained in the two cases were similar. This was the effect of the slurry density, which was by more than 80% higher and thus effectively compensated for the turbine lower efficiency during the slurry flow. At a constant water output of about 0.6 m3/s, for which the turbine efficiency at the slurry flow reached the maximum value, the mechanical power on the turbine shaft was about 35 kW. These results suggest that a simple turbine can be an effective tool for recovering mechanical energy from slurry pipelines. More experiments and simulations could be performed to further understand and optimize the process.
Author Contributions
Conceptualization, P.D.; Methodology, P.D.; Software, T.P.; Validation, T.P. and K.K.; Formal analysis, P.D.; Investigation, T.P.; Data curation, K.K.; Writing—original draft, T.P. and P.D.; Writing—review & editing, P.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded under the contract KGHM-ZW-U 0131-2022.
Data Availability Statement
The data presented in this study are available on request from the corresponding author due to legal reasons.
Acknowledgments
We gratefully acknowledge Poland’s high-performance Infrastructure PLGrid Cyfronet AGH for providing computer facilities and support within computational grant no PLG/2023/016373 and KGHM Polska Miedź S.A.
Conflicts of Interest
The authors declare no conflict of interest.
References
- de Brito, M.A.R.; Baidya, D.; Ghoreishi-Madiseh, S.A. Techno-economic feasibility assessment of a diesel exhaust heat recovery system to preheat mine intake air in remote cold climate regions. Int. J. Min. Sci. Technol. 2020, 30, 517–523. [Google Scholar] [CrossRef]
- Kuyuk, A.F.; Ghoreishi-Madiseh, S.A.; Hassani, F.P. Closed-loop bulk air conditioning: A renewable energy-based system for deep mines in arctic regions. Int. J. Min. Sci. Technol. 2020, 30, 511–516. [Google Scholar] [CrossRef]
- Sjöström, S.; Klintenäs, E.; Johansson, P.; Nyqvist, J. Optimized model-based control of main mine ventilation air flows with minimized energy consumption. Int. J. Min. Sci. Technol. 2020, 30, 533–539. [Google Scholar] [CrossRef]
- Zhai, Y.; Zhao, X.; Xue, G.; Dong, Z. Study on Heat Transfer Performance and Parameter Improvement of Gravity-Assisted Heat Pipe Heat Transfer Unit for Waste Heat Recovery from Mine Return Air. Energies 2023, 16, 6148. [Google Scholar] [CrossRef]
- Casoli, P.; Riccò, L.; Campanini, F.; Bedotti, A. Hydraulic hybrid excavator—Mathematical model validation and energy analysis. Energies 2016, 9, 1002. [Google Scholar] [CrossRef]
- Liu, W.; Peng, X.; Liu, W.; Zhang, N.; Wang, X. A cost-effective approach to recycle serpentine tailings: Destruction of stable layered structure and solvent displacement crystallization. Int. J. Min. Sci. Technol. 2022, 32, 595–603. [Google Scholar] [CrossRef]
- Lombardi, L.; Carnevale, E.; Corti, A. A review of technologies and performances of thermal treatment systems for energy recovery from waste. Waste Manag. 2015, 37, 26–44. [Google Scholar] [CrossRef]
- Duda, A.; Fenicki, A.; Molski, P.; Szostak, E.; Duda, P. Design and Operation of a Modern Polish Plant for Plastic Waste Recycling through the Degradative Depolymerization Process. A Case Study. Energies 2020, 13, 6620. [Google Scholar] [CrossRef]
- Gupta, A.; Likozar, B.; Jana, R.; Chanu, W.C.; Singh, M.K. A review of hydrogen production processes by photocatalytic water splitting—From atomistic catalysis design to optimal reactor engineering. Int. J. Hydrogen Energy 2022, 47, 33282–33307. [Google Scholar] [CrossRef]
- Rubin, K.; Pohar, A.; Dasireddy, V.D.; Likozar, B. Synthesis, characterization and activity of CuZnGaOx catalysts for the water–gas shift (WGS) reaction for H2 production and CO removal after reforming. Fuel Process. Technol. 2018, 169, 217–225. [Google Scholar] [CrossRef]
- Lotrič, A.; Sekavčnik, M.; Pohar, A.; Likozar, B.; Hočevar, S. Conceptual design of an integrated thermally self-sustained methanol steam reformer—High-temperature PEM fuel cell stack manportable power generator. Int. J. Hydrogen Energy 2017, 42, 16700–16713. [Google Scholar] [CrossRef]
- Titus, J.; Ayalur, B. Design and fabrication of in-line turbine for pico hydro energy recovery in treated sewage water distribution line. Energy Procedia 2019, 156, 133–138. [Google Scholar] [CrossRef]
- Hypolite, G.; Boutin, O.; Del Sole, S.; Cloarec, J.-F.; Ferrasse, J.-H. Evaluation of a water network’s energy potential in dynamic operation. Energy 2023, 271, 127066. [Google Scholar] [CrossRef]
- Thyer, S.; White, T. Energy recovery in a commercial building using pico-hydropower turbines: An Australian case study. Heliyon 2023, 9, e16709. [Google Scholar] [CrossRef] [PubMed]
- Power, C.; McNabola, A.; Coughlan, P. Development of an evaluation method for hydropower energy recovery in wastewater treatment plants: Case studies in Ireland and the UK. Sustain. Energy Technol. Assess. 2014, 7, 166–177. [Google Scholar] [CrossRef]
- García, A.M.; Gallagher, J.; Chacón, M.C.; Mc Nabola, A. The environmental and economic benefits of a hybrid hydropower energy recovery and solar energy system (PAT-PV), under varying energy demands in the agricultural sector. J. Clean. Prod. 2021, 303, 127078. [Google Scholar] [CrossRef]
- Messa, G.V.; Malavasi, S. Numerical prediction of particle distribution of solid-liquid slurries in straight pipes and bends. Eng. Appl. Comput. Fluid Mech. 2014, 8, 356–372. [Google Scholar] [CrossRef]
- Han, L.; Wang, Y.; Zhang, G.; Wei, X. The particle induced energy loss mechanism of Pelton turbine. Renew. Energy 2021, 173, 237–248. [Google Scholar] [CrossRef]
- Xu, Z.; Han, Z.; Qu, H. Comparison between Lagrangian and Eulerian approaches for prediction of particle deposition in turbulent flows. Powder Technol. 2020, 360, 141–150. [Google Scholar] [CrossRef]
- Messa, G.V.; Yang, Q.; Adedeji, O.E.; Chára, Z.; Duarte, C.A.R.; Matoušek, V.; Rasteiro, M.G.; Sanders, R.S.; Silva, R.C.; de Souza, F.J. Computational Fluid Dynamics Modelling of Liquid–Solid Slurry Flows in Pipelines: State-of-the-Art and Future Perspectives. Processes 2021, 9, 1566. [Google Scholar] [CrossRef]
- Razavi, F.; Komrakova, A.; Lange, C.F. CFD–DEM simulation of sand-retention mechanisms in slurry flow. Energies 2021, 14, 3797. [Google Scholar] [CrossRef]
- Płusa, T.; Talaga, J.; Duda, A.; Duda, P. Modeling mixing dynamics in uncovered baffled and unbaffled stirred tanks. AIChE J. 2021, 67, e17322. [Google Scholar] [CrossRef]
- Upadhyay, M.; Kim, A.; Kim, H.; Lim, D.; Lim, H. An assessment of drag models in eulerian–eulerian cfd simulation of gas–solid flow hydrodynamics in circulating fluidized bed riser. Chemengineering 2020, 4, 37. [Google Scholar] [CrossRef]
- Kaushal, D.; Kumar, A.; Tomita, Y.; Kuchii, S.; Tsukamoto, H. Flow of mono-dispersed particles through horizontal bend. Int. J. Multiph. Flow 2013, 52, 71–91. [Google Scholar] [CrossRef]
- Jin, B.; Wang, X.; Zhong, W.; Tao, H.; Ren, B.; Xiao, R. Modeling on high-flux circulating fluidized bed with geldart group b particles by kinetic theory of granular flow. Energy Fuels 2010, 24, 3159–3172. [Google Scholar] [CrossRef]
- Johnson, P.C.; Jackson, R. Frictional–collisional constitutive relations for granular materials, with application to plane shearing. J. Fluid Mech. 1987, 176, 67–93. [Google Scholar] [CrossRef]
- Schaefer, D.G. Instability in the Evolution Equations Describing Incompressible Granular Flow. J. Differ. Equ. 1987, 66, 19–50. [Google Scholar] [CrossRef]
- Gidaspow, D. Multiphase Flow and Fluidization: Continuum and Kinetic Theory Descriptions; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Siemens. Simcenter STAR-CCM+ Version 2210 User Guide; Siemens PLM Software: Munich, Germany, 2022. [Google Scholar]
- Gillies, R.G.; Shook, C.A.; Xu, J. Modelling heterogeneous slurry flows at high velocities. Can. J. Chem. Eng. 2004, 82, 1060–1065. [Google Scholar] [CrossRef]
- Joubert, E.; Harms, T.; Venter, G. Computational simulation of the turbulent flow around a surface mounted rectangular prism. J. Wind. Eng. Ind. Aerodyn. 2015, 142, 173–187. [Google Scholar] [CrossRef]

























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).