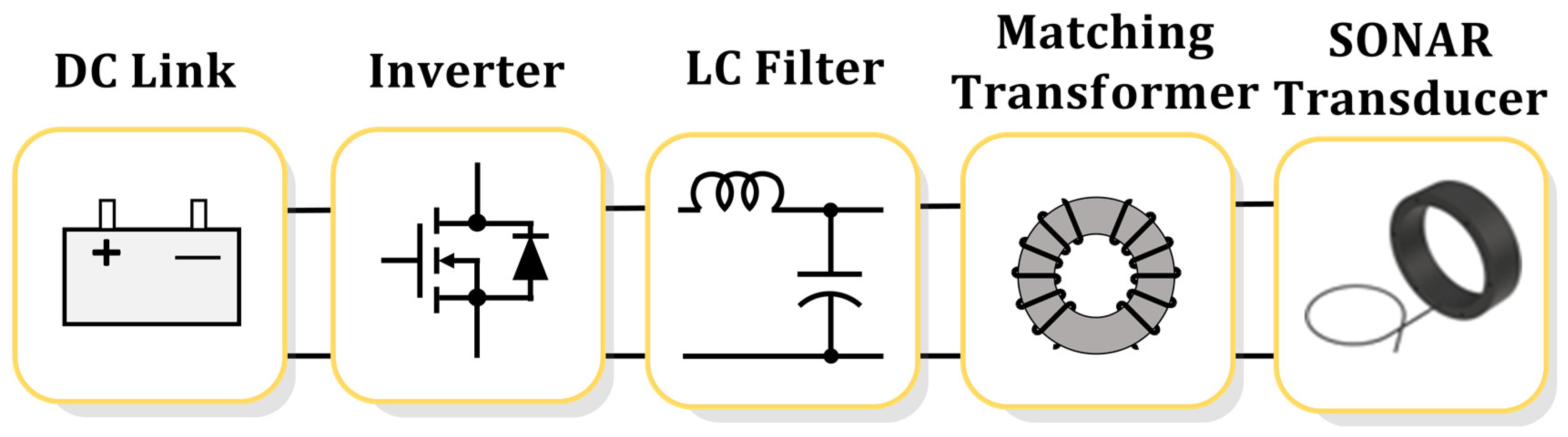
SONAR is used to detect underwater objects by converting electrical energy into sound. The SONAR power system contains the following components, as shown in
Figure 1 [
7,
8,
9]. (1) A direct-current (DC) power supply serves as the electrical energy source required for generating acoustic energy. (2) A power converter that converts the DC voltage into alternating current (AC) to provide the desired electrical energy supply for the desired sound signal intensity. (3) An LC filter (or low-pass filter) that removes unnecessary frequencies for acoustic detection. (4) An impedance-matching transformer that eliminates the reactive power generated by the material characteristics of the SONAR sensor. (5) The SONAR sensor converts the input electrical signal into an acoustic signal.
2.1. SONAR Sensor Characteristics
Recently, the development focus of SONAR technology has shifted toward increasing the detection accuracy within the same signal. Research efforts have been directed toward signal analysis techniques, optimal underwater target detection patterns, and the study of signal spectrum variations and interference [
11]. Another trend has aimed to enhance detection performance through multiple sensors, high output power, and broadband frequency usage, with the aim of improving detection precision, resolution, and range. To achieve these performance improvements, SONAR sensors are designed and manufactured to achieve a high output, operate at high pressures, and support broadband frequencies. Accordingly, various sensors with distinct characteristics have been developed, as outlined in
Table 1 [
12]. To satisfy the requirements for acoustic detection performance, the free-flooded ring (FFR) sensor, which is characterized by structural features that make it suitable for deep-sea operation and minimal frequency-specific variations when operating in the broadband mode, was selected in this study [
12,
13,
14].
2.2. High-Power Amplifier Topology
As depicted in
Figure 1, traditional SONAR amplifier operation involves the generation of voltage in a sinusoidal waveform for SONAR through high-speed switching of the converter, resulting in sine-wave synthesis and high-frequency removal via the LC filter. Furthermore, to address problems related to the quality of the harmonic content in the voltage applied to the SONAR sensor and volume-related concerns of the converter, a matching frequency within the operating frequency range of the SONAR sensor was selected to design a matching transformer, as discussed by previous researchers [
15,
16]. Additionally, an efficient power amplification method using the Class E technique has been proposed to address the efficiency problems arising from power converter switching [
16].
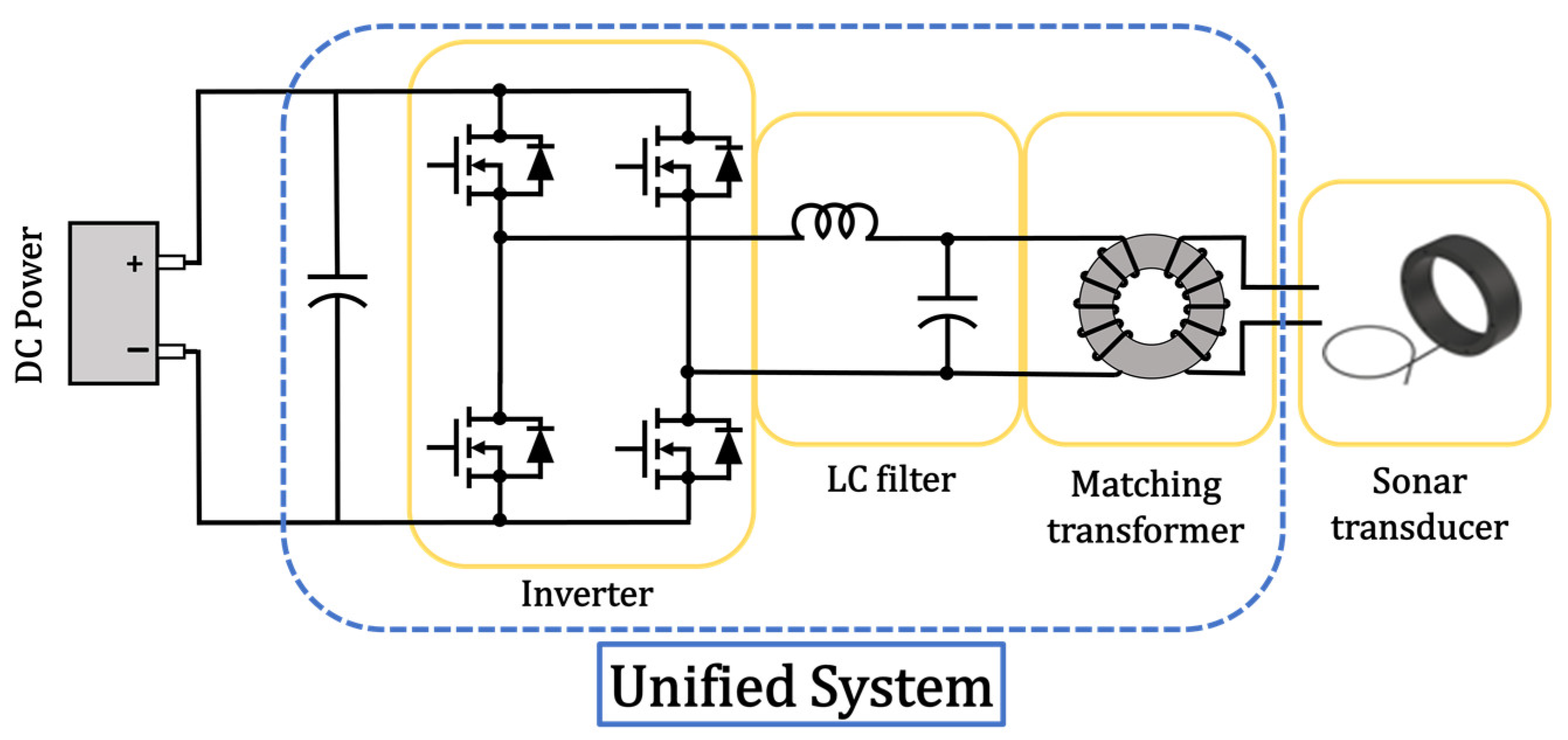
However, as depicted in
Figure 2, when utilizing multiple SONAR sensors with a single amplifier, in the event of abnormal operation of the amplifier, it suffices to avoid using the amplifier corresponding to the malfunctioning sensor. On the other hand, when driving a single sensor with a single amplifier, contingency measures for emergency operation owing to amplifier malfunctions must be considered. Furthermore, for the freedom of repair and mobility by personnel, such as operators and maintenance workers, high-capacity amplifiers adopt a topology configuration using multiple legs or a full-bridge serial arrangement in a multilevel approach [
1,
17,
18,
19]. However, extensive research on high-capacity amplifier designs has not been conducted.
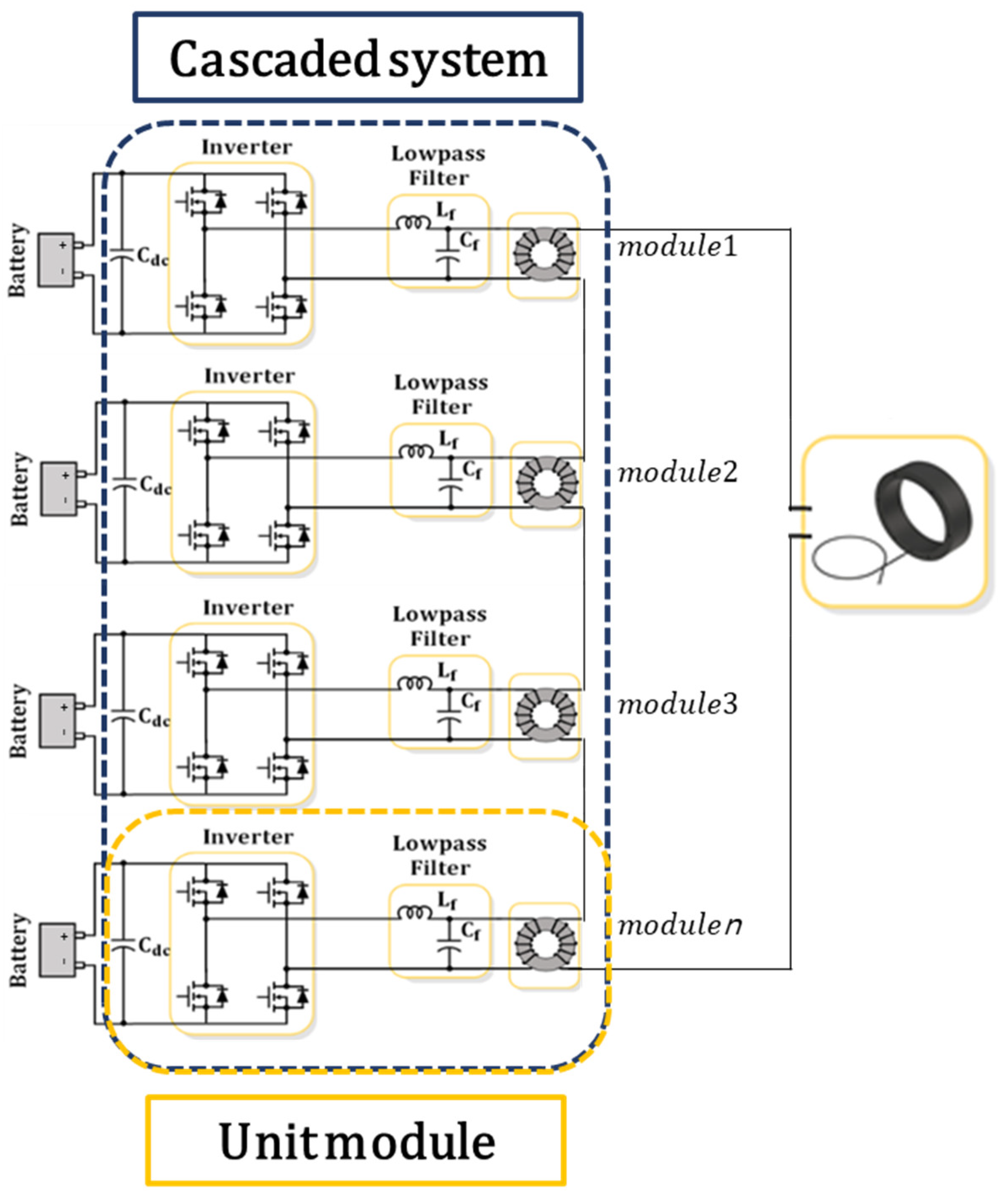
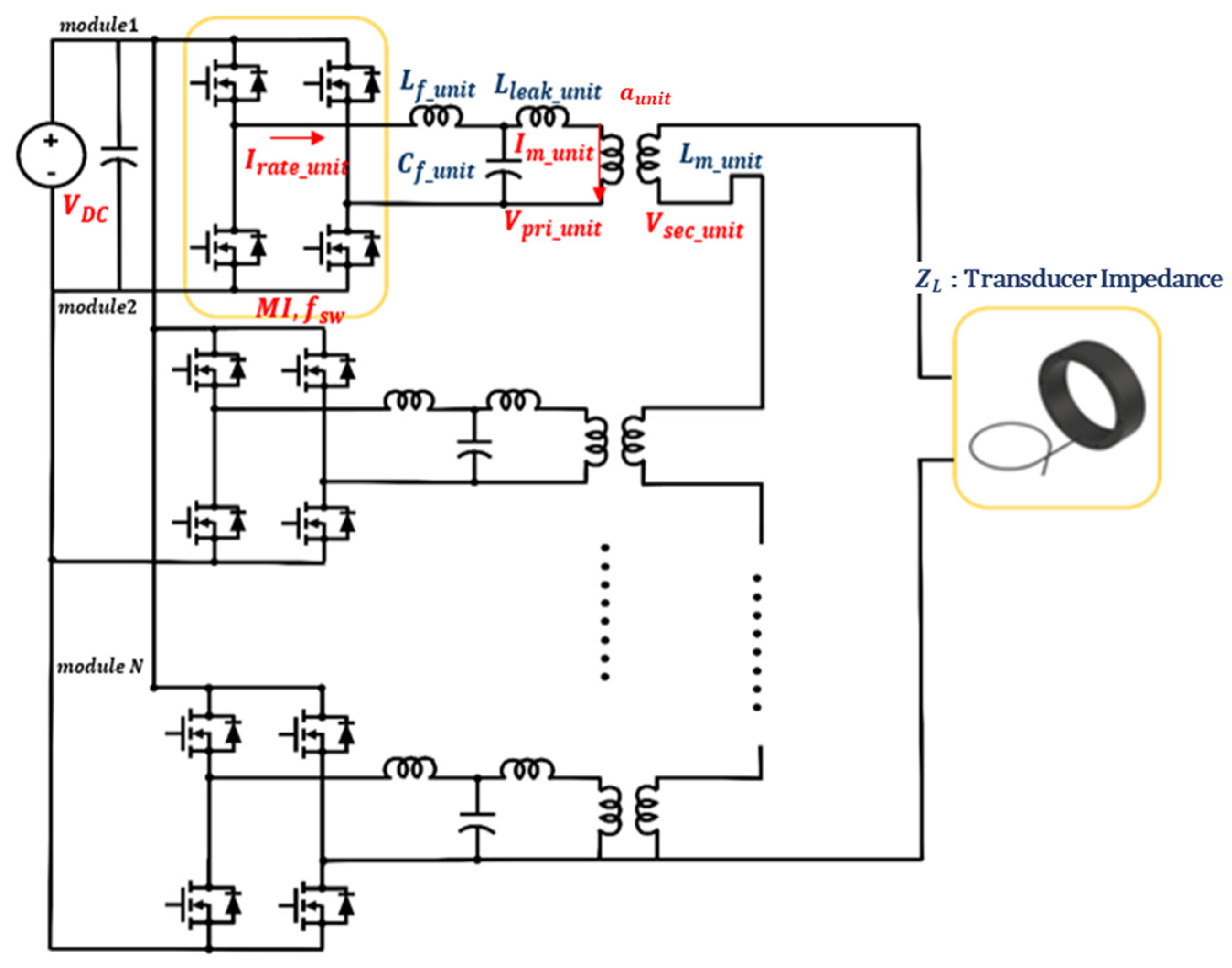
In single-power converters ranging from several kilowatts to tens of kilowatts, high-frequency switching results in high total harmonic distortion (THD), which adversely affects the quality of the generated acoustic waves [
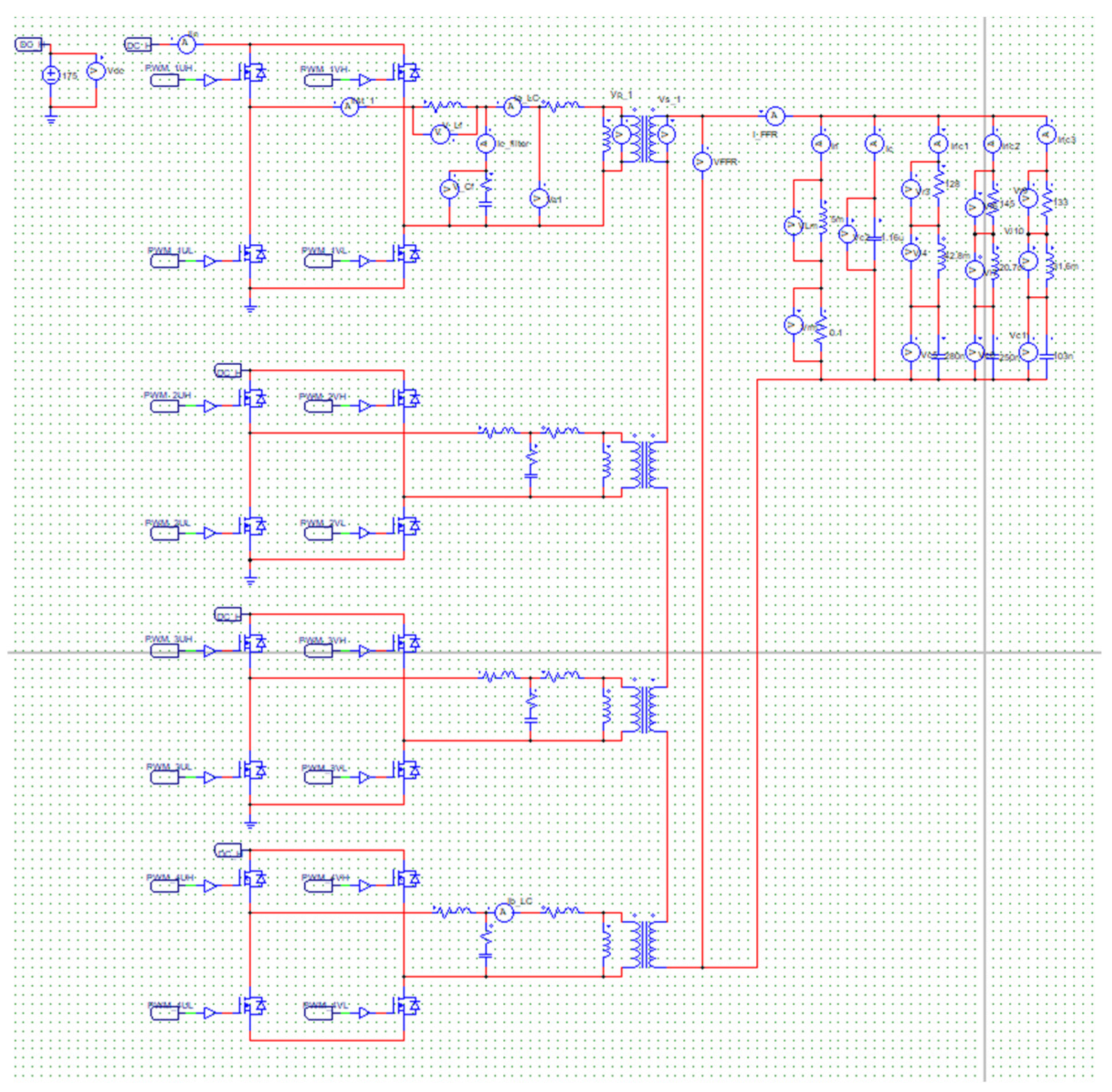
7]. As depicted in
Figure 3, to satisfy the demands of increased inverter switching speed and reduced volume and considering the proper functioning of the amplifier under adverse conditions, ease of transport, and replacement, a high-capacity amplifier is configured with a cascaded arrangement in the context of multi-kW SONAR power amplifiers. However, to achieve effects similar to those of the conventional single-amplifier configuration when constructing a cascaded amplifier, the design must address the following aspects:
Improvement in harmonic quality owing to the LC filter;
Increase in power efficiency owing to the reduction in the amplifier reactive power via the matching transformer;
Prevention of energy sharing between serial modules based on phase delays caused by the LC filter and matching transformer in each serial module;
Minimal changes in the voltage delivery characteristics of the amplifier output within the operating frequency range of the SONAR sensor.
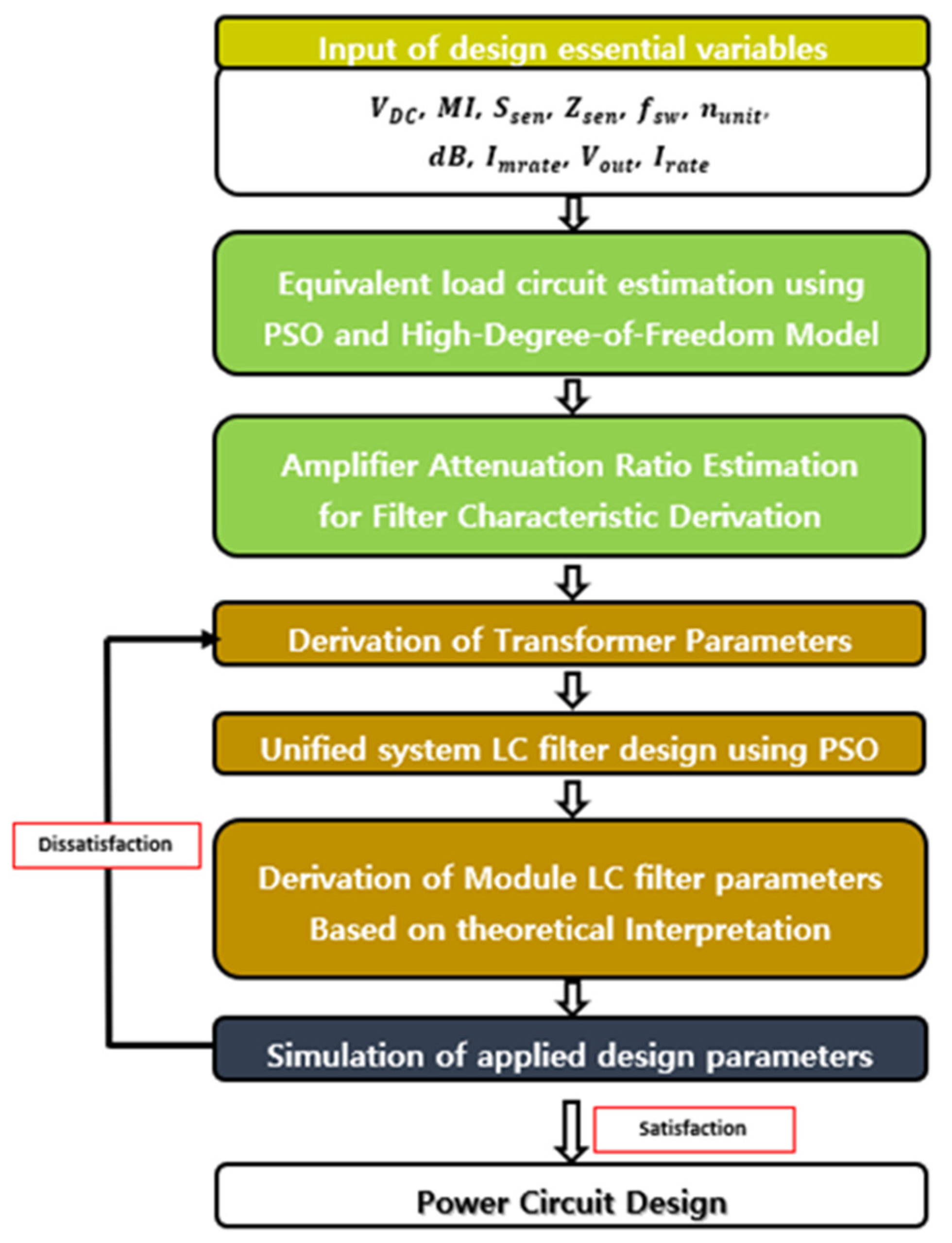
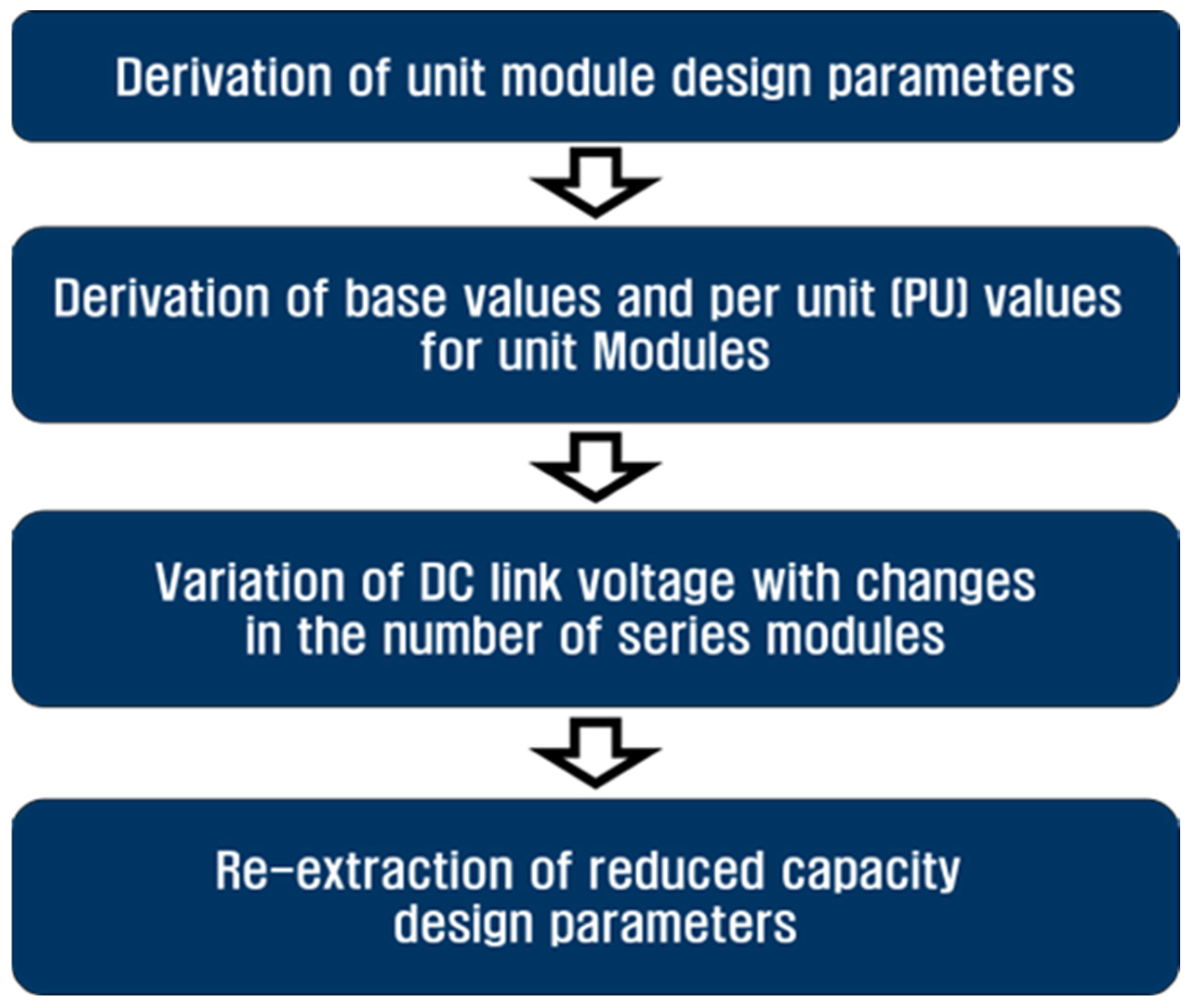
Considering the four key considerations outlined above, this paper proposes a procedure for designing high-power SONAR amplifiers, as depicted in
Figure 4. Initially, the necessary design parameter variables for the high-power amplifier are input. Thereafter, based on the load characteristics when the amplifier is used, an equivalent electrical circuit is derived [
20]. In the third step, the cutoff frequencies and attenuation ratios are set for the simultaneous design of the LC filter and transformer to derive the design parameters of the single system. Subsequently, the relationships between the design parameters within the modules are derived using equations related to the single and serial system modules. The procedure reveals that the theoretically analyzed amplifier characteristics align closely with the simulation results. Therefore, the mathematical relationships between the component parameters within a single system are first derived to address the considerations for the high-power SONAR amplifier design outlined in this paper, as shown in
Figure 2, along with those between the component parameters for constructing a serial system amplifier, as shown in
Figure 3. These relationships are then used to facilitate the parameter derivation. Finally, using the relationships between the design parameters of a single system and serial module parameters, a design method for high-power amplifiers with a serial topology, such as that depicted in
Figure 3, is developed. The developed method is validated through theoretical analysis, simulations, and experimentation using a reduced-capacity topology to assess its suitability.
2.3. Relationship between Unified Amplifier System and Cascaded Amplifier System for Sonar Applications
To derive the mutual relationships between the design parameters within the structures of
Figure 2 and
Figure 3, we first employ Thevenin’s equivalent circuit to formulate expressions for the supply voltage and load of the reference single system. Subsequently, we similarly utilize Thevenin’s equivalent circuit to derive the mutual relationships within the serial system. We then compare these equations with a reference equation to deduce the relationship between the number of serial modules (n) and the design parameters.
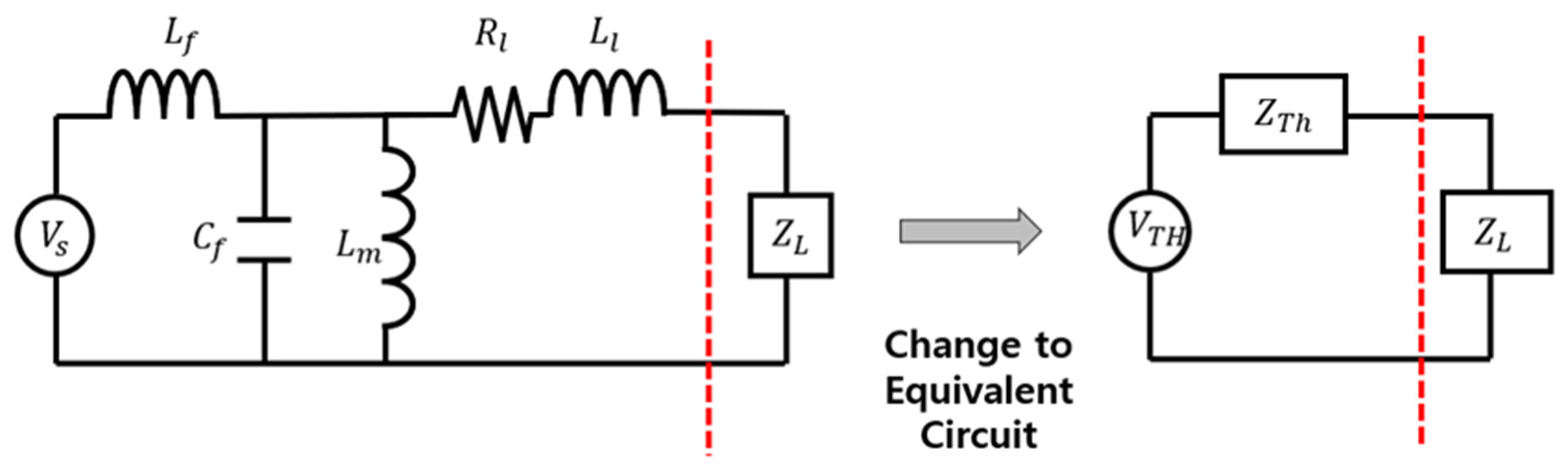
For the mathematical analysis of the SONAR-specific single-system structure in
Figure 2, we assume that the battery (DC link) voltage remains constant over time and the inverter linearly outputs the voltage according to the modulation index (MI). This assumption enables us to represent the voltage applied to the LC filter as an equivalent voltage source, Vs. Furthermore, the component parameters within the SONAR amplifier structure (illustrated in
Figure 1) can be parameterized, as shown in
Table 2. By utilizing the variables from
Table 2 and the structure illustrated in
Figure 1, we can represent the equivalent circuit of a single system, depicted in
Figure 5.
To calculate the Thevenin equivalent circuit voltage and impedance values in
Figure 5, the expressions for the voltage across each magnetizing inductance and the equivalent impedance as observed from the load (
) can be formulated as shown by Equations (1) and (2). In Equation (2), the leakage inductance of the transformer and the parasitic resistance have values that are less than a few percent of the transformer’s magnetizing inductance [
20,
21,
22]; thus, these parameters can be excluded for simplicity.
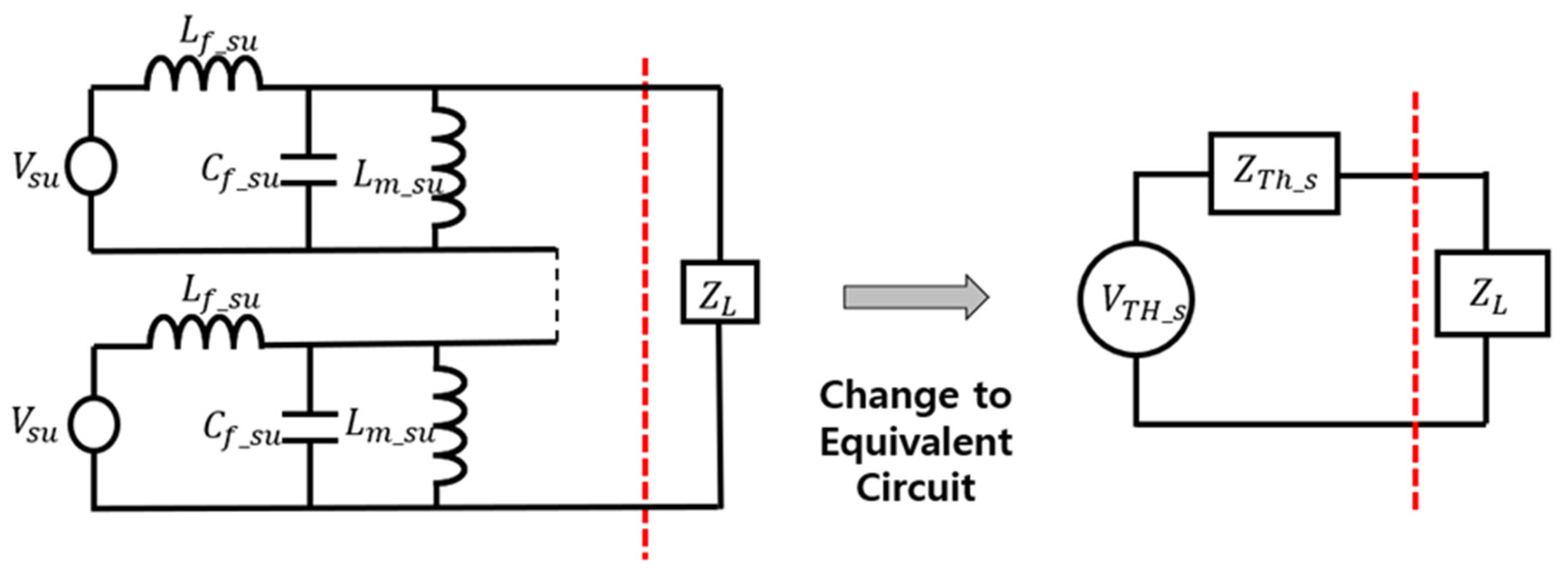
Following a procedure similar to the derivation of the equations for the single-system circuit shown in
Figure 5, the equations for the serial system were also derived using variables, as listed in
Table 3. It was assumed that there were no variations in the design parameters between the serial modules, and the DC link voltage was assumed to be supplied in parallel from a DC power source.
Similar to the process outlined in
Figure 5, the Thevenin equivalent circuit shown in
Figure 6 can be formulated as shown by Equations (3) and (4).
The electrical characteristics of the single system illustrated in
Figure 2 and serial system in
Figure 3 must be identical. Therefore, Equations (2) and (4) should be identical. To establish this equivalence, we derived the relationships between the component parameters of the serial and single systems, yielding Equation (5). In Equation (5), the resistances and inductances are divided by the number of modules in the serial configuration, and the capacitance in the serial system is equal to the capacitance of a single system multiplied by the number of modules.
From the results of Equation (5), it follows that the voltage of the Thevenin equivalent circuit should be equal to the voltage of the single system; consequently, the relationship between the two voltages and the number of serial modules is expressed as
2.4. Extracting Design Parameters for High-Power Amplifiers
Before proceeding with the derivation of the design parameters for the high-power amplifier of the single system using the design procedure shown in
Figure 4, the number of serial modules in the serial system is determined using the voltage transfer function formula. The symbols and definitions of the variables used to derive the voltage transfer function formula are presented in
Table 4 and
Figure 7.
To derive the voltage transfer function formula, certain values among the variables of the high-power amplifier were fixed according to the specified requirements, as shown in
Table 5.
Among the values used to derive the design parameters for both the single system and individual modules, the capacity of the high-power amplifier, operating frequency range of the FFR sensor, DC link voltage, selected MI for controllability, and inverter switching frequency were fixed as control variables. Additionally, the variables in
Table 4 that can be expressed as relationships with the control variables are categorized as dependent variables, reducing the types of variables introduced in both tables. The control variables and dependent variables can be mathematically expressed by (7)–(12).
According to the dependent variables, the voltage transfer function relative to the primary-side voltage of the transformer compared with the voltage applied to the SONAR sensor can be formulated as shown by Equation (13). When converted from a complex form to a magnitude, Equation (14) is obtained. The equation expresses the relationship in terms of the load impedance magnitude, number of serial modules, ratio of rated current to magnetizing current, and ratio of magnetizing inductance to leakage inductance. The impedance values were determined based on the sensor impedance at the frequency corresponding to the highest load. The leakage inductance ratio was selected as 1% considering the worst-case scenario based on transformer manufacturing approaches [
22]. The results for the voltage transfer as a function of
n and
x are shown in
Figure 8.
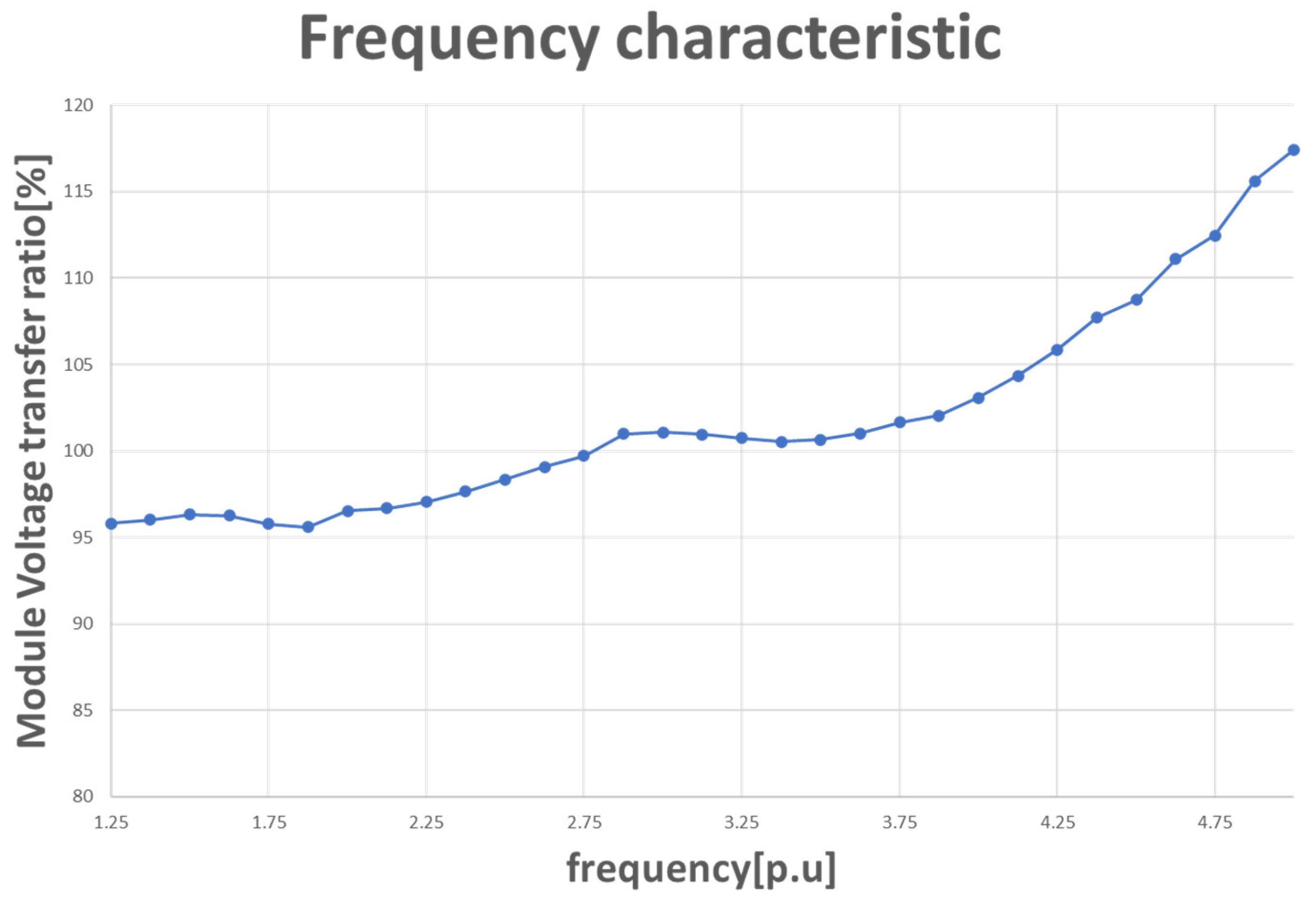
Assuming a ratio of the rated current to the magnetizing current (x) of approximately 5% in Equation (14), the voltage transfer ratio with respect to the number of serial modules is shown in
Figure 9. Among these values, the number of serial modules was selected according to the point at which the change in voltage transfer became less significant with the variation in the number of serial modules; this occurred at 10 serial modules. Therefore, the number of serial modules was selected as a design parameter.
2.5. Derivation of LC Filter Parameters
To generate the AC voltage and perform impedance matching, LC filters and transformers are primarily designed using two approaches. In the first approach, an equivalent electrical circuit with impedance and phase matching at the matching frequency of the SONAR sensor is derived, and the inductance value for reactive power removal is designed using these parameters. Subsequently, the SONAR load, including the matching transformer, is equivalently transformed into a single resistance, and the LC filter parameters are derived to match the cutoff frequency [
15]. However, this approach does not consider the parasitic elements within the LC filter and matching transformer, which leads to discrepancies between the design characteristics and actual performance. Thus, an approach was recently proposed that involves the simultaneous design of LC filters and matching transformers, considering the parasitic elements within both components [
7]. Therefore, in this study, the design of LC filters for a single system was considered a parasitic parameter.
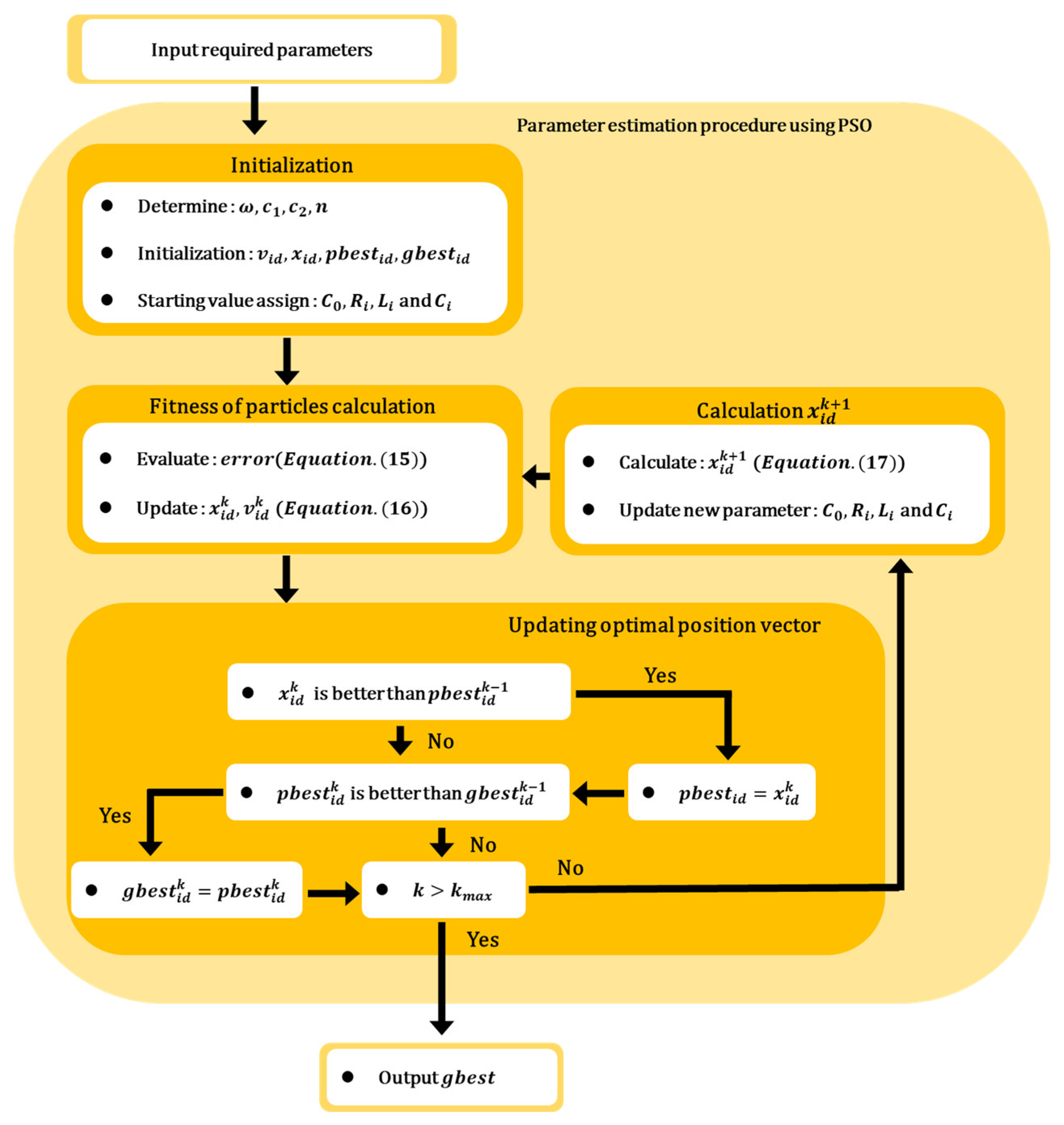
Figure 10 and the following particle swarm optimization (PSO) algorithm procedure and equations were used to derive the parameters in
Table 6:
(1) Initialization phase: The necessary variables for the PSO algorithm were initialized, and the initial values were set.
(2) Fitness calculation of the particles: The impedance characteristics of the sensor were calculated using the estimated parameter values of the equivalent circuit and the variables obtained from the previous step. The calculated and measured impedance characteristics were compared to evaluate the error level. The evaluation was performed using Equation (15), where
represents the error value;
and
represent the weighting factors for the magnitude and phase errors, respectively; and
and
represent the errors in the estimated impedance magnitude and phase, respectively.
(3) and update phase: The evaluation values of each particle, as determined by the fitness function, were compared with the previously recorded best evaluation value . If the current evaluation value is lower than the previous best evaluation value, the parameter values were updated and assigned a new . Subsequently, among all the updated values, the one with the best evaluation result, that is, , was compared with the previous best evaluation result within the swarm. If the new evaluation result is superior, the derived parameters are updated. Once all the updates were completed, the algorithm checked whether the maximum number of iterations had been reached or whether the evaluation result satisfied the termination criterion. If either condition was satisfied, the PSO algorithm was terminated. The process ensured that the particles continuously updated their personal best positions and velocities with consideration of the global best position within the swarm.
(4)
calculation phase: In this phase, when the maximum number of iterations was not exceeded and the evaluation result did not satisfy the termination criterion, new parameter values (
) were assigned for the next optimization operation. The new parameter values were determined using the PSO algorithm, as shown in Equation (16). The velocity change (
), which indicated the direction and magnitude of the particle movement, was added to the current
value, resulting in the derivation of the new
value, as shown in Equation (17). This calculation phase ensured that each particle updated its position based on its previous position and the velocity change determined by the PSO algorithm, enabling continuous exploration and refinement of the parameter space in the search for an optimal solution.
The parameters obtained through the aforementioned procedure for satisfying the maximum harmonic distortion criteria imposed on the SONAR, along with a comparison between the baseline voltage transfer function and parameter optimization results, are presented in
Table 7.
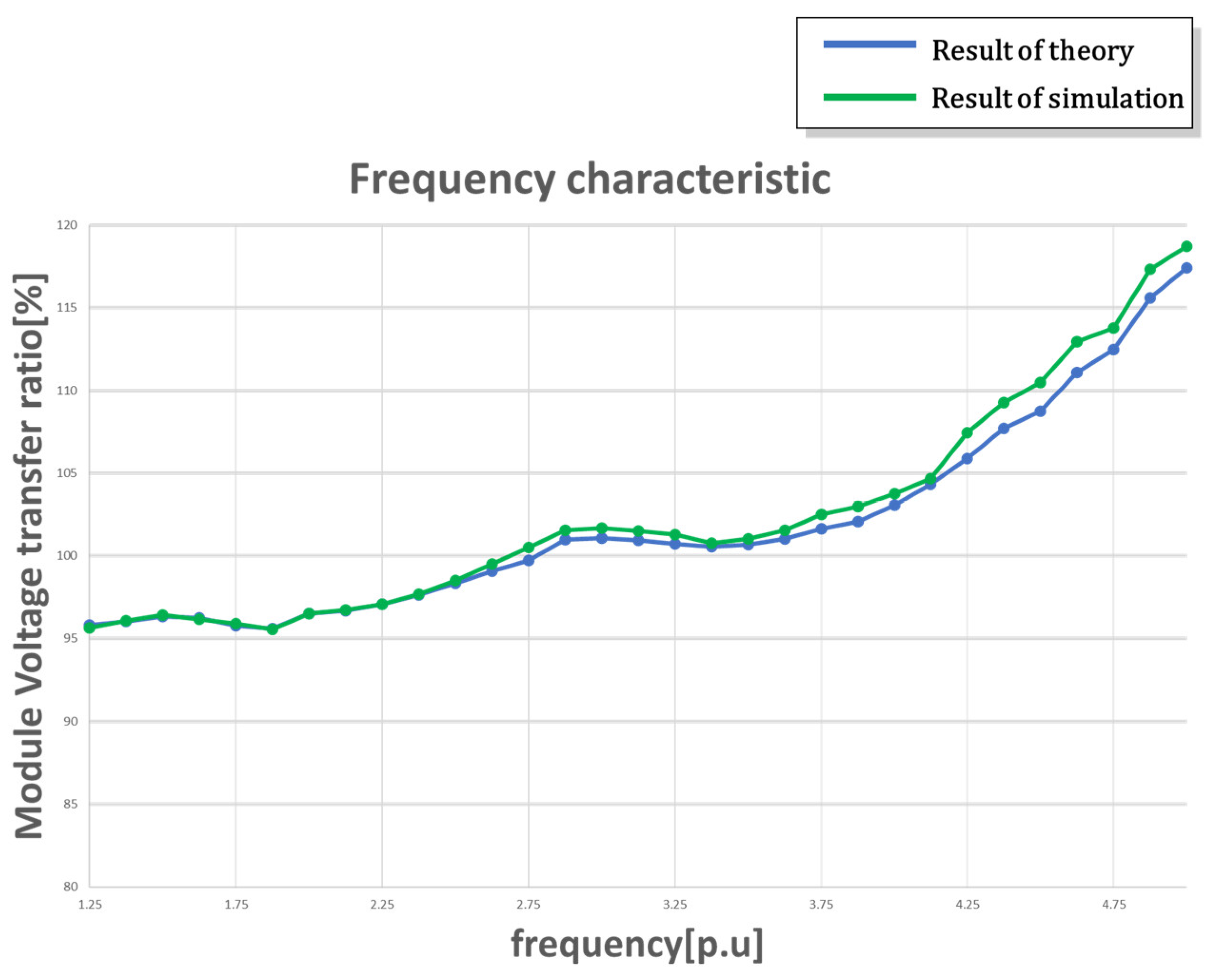
The design parameters of the modules obtained through the proposed high-power amplifier design procedure shown in
Figure 4 are presented in
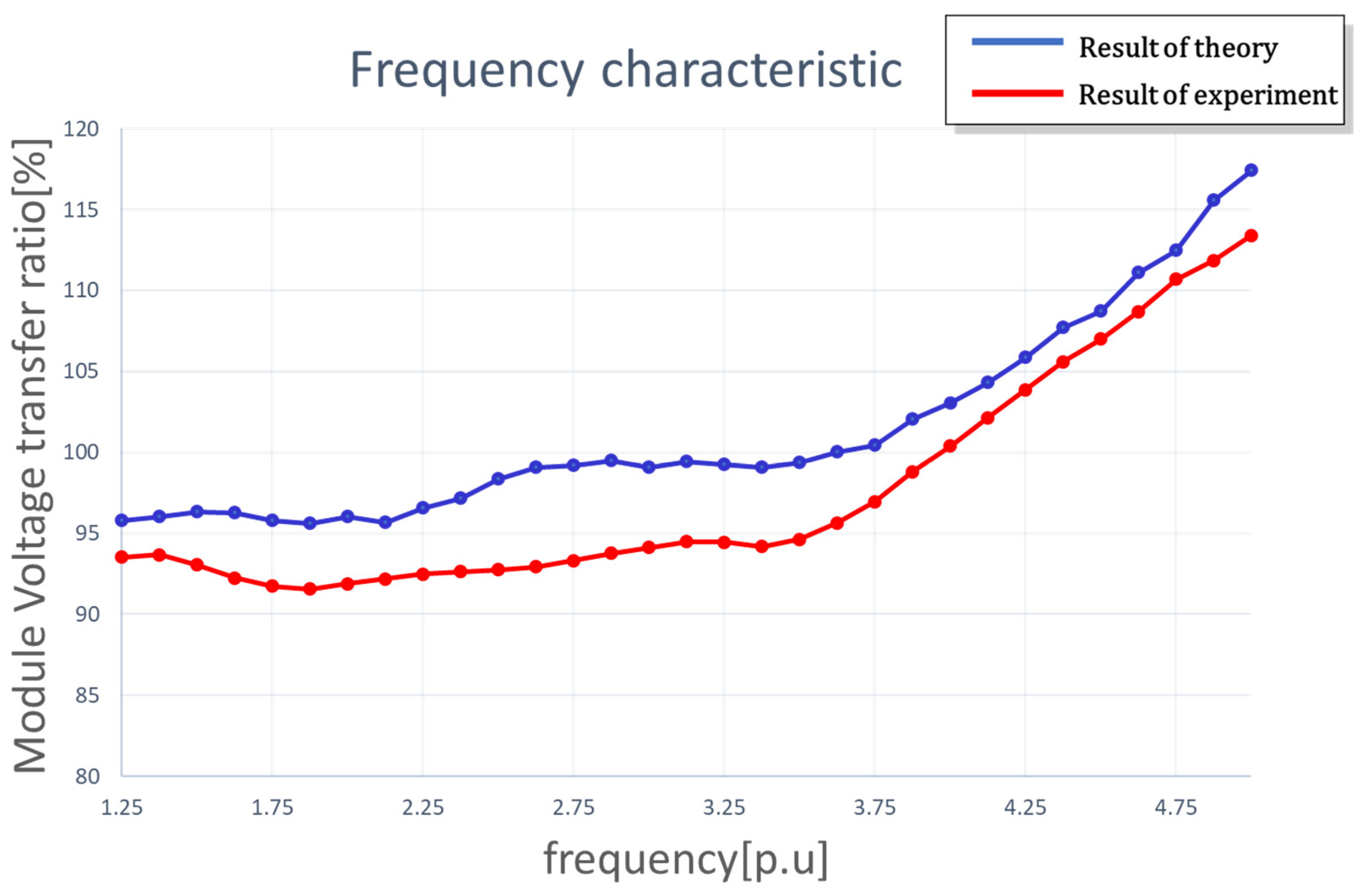
Table 8. The voltage transfer characteristics of the parameters obtained using the proposed procedure within the SONAR load-operating bandwidth are shown in
Figure 11.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}