
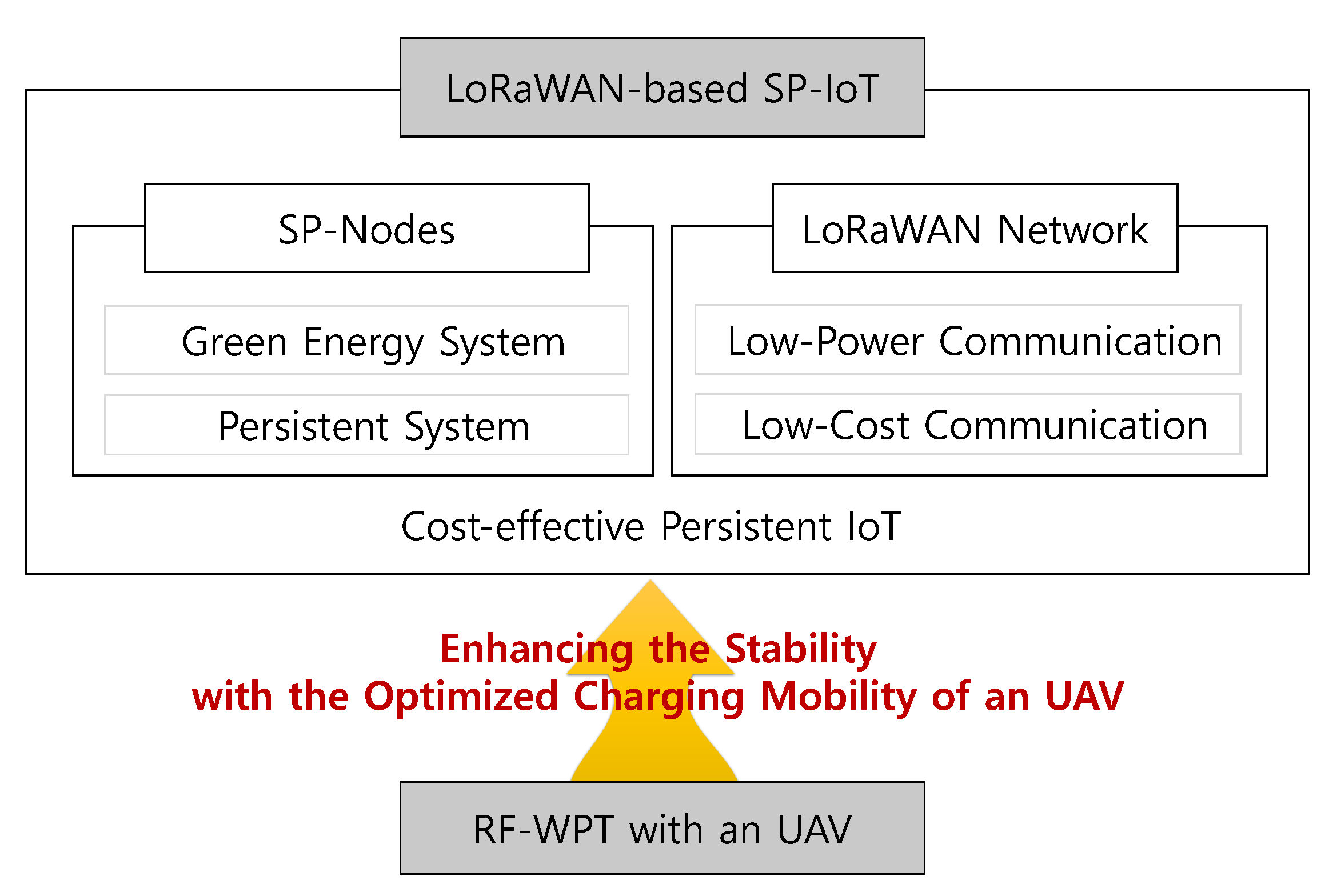
Optimizing the Charging Mobility of WPT-Enabled UAV to Enhance the Stability of Solar-Powered LoRaWAN IoT



Abstract
1. Introduction
- Considering the energy model for SP-nodes: The proposed method establishes a threshold, based on existing research, to differentiate between nodes with insufficient energy and nodes with sufficient energy within the SP-nodes. Then, it transmits energy exclusively to nodes with insufficient energy, where the remaining energy falls below the threshold. Nodes with residual energy exceeding the threshold do not require WPT from the drone, as they operate normally with the currently harvested solar energy.
- Considering the energy model of the drone: The drone’s energy is consumed for both flight and WPT. Therefore, even if the drone transmits energy only to nodes with insufficient energy, it may not be able to visit all of these nodes due to its limited energy.
- Considering the characteristics of RF-WPT: The RF-WPT technique enables the simultaneous charging of multiple nodes located around a single hovering location. Therefore, the method of transmitting energy by visiting every node for charging is inefficient.
2. Related Work
2.1. Solar-Powered IoT
2.2. Wireless Power Transmission for IoT
3. Proposed Method
3.1. Energy Model
3.1.1. Energy Model of SP-Nodes
3.1.2. RF-WPT Energy Model
3.2. Problem Definition
3.3. Max-Min Residual Energy (MmRE) Method
4. Experimental Results
4.1. Experimental Environments
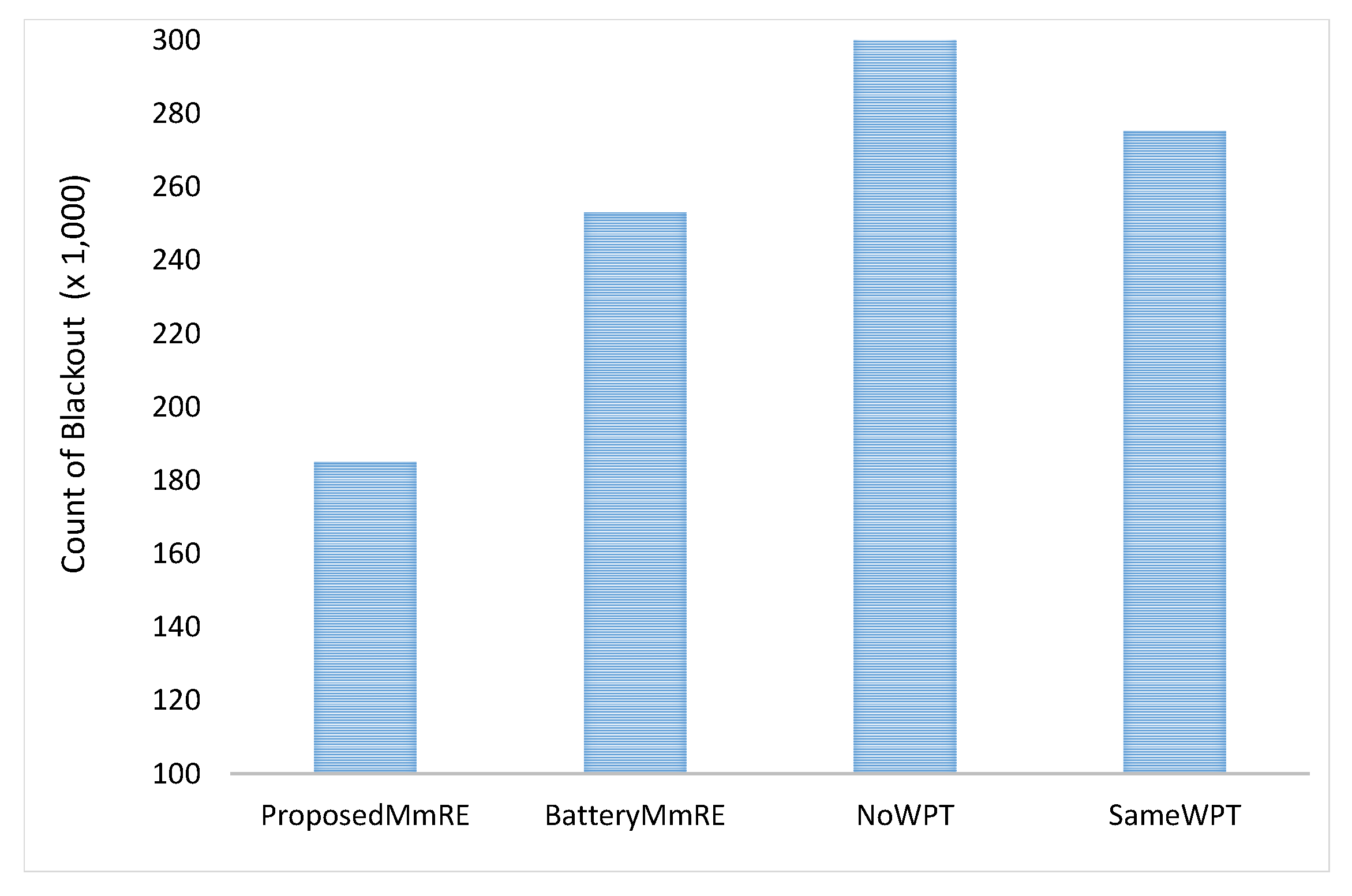
4.2. Number of Nodes Experiencing a Blackout
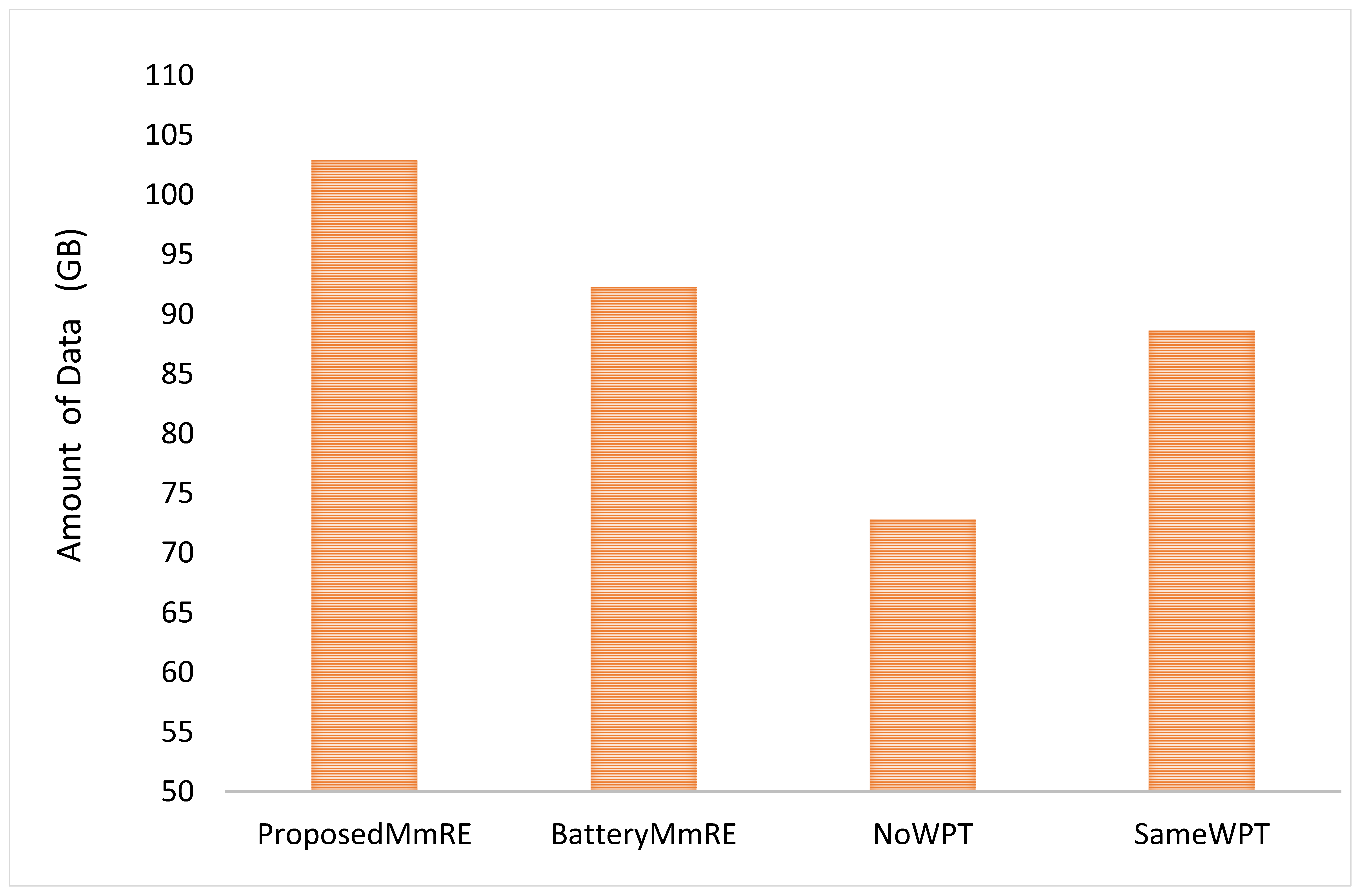
4.3. Amount of Data Collected at the Base Station
4.4. Performance Comparison Based on Field Size
4.5. Performance Comparison Based on the Number of Nodes
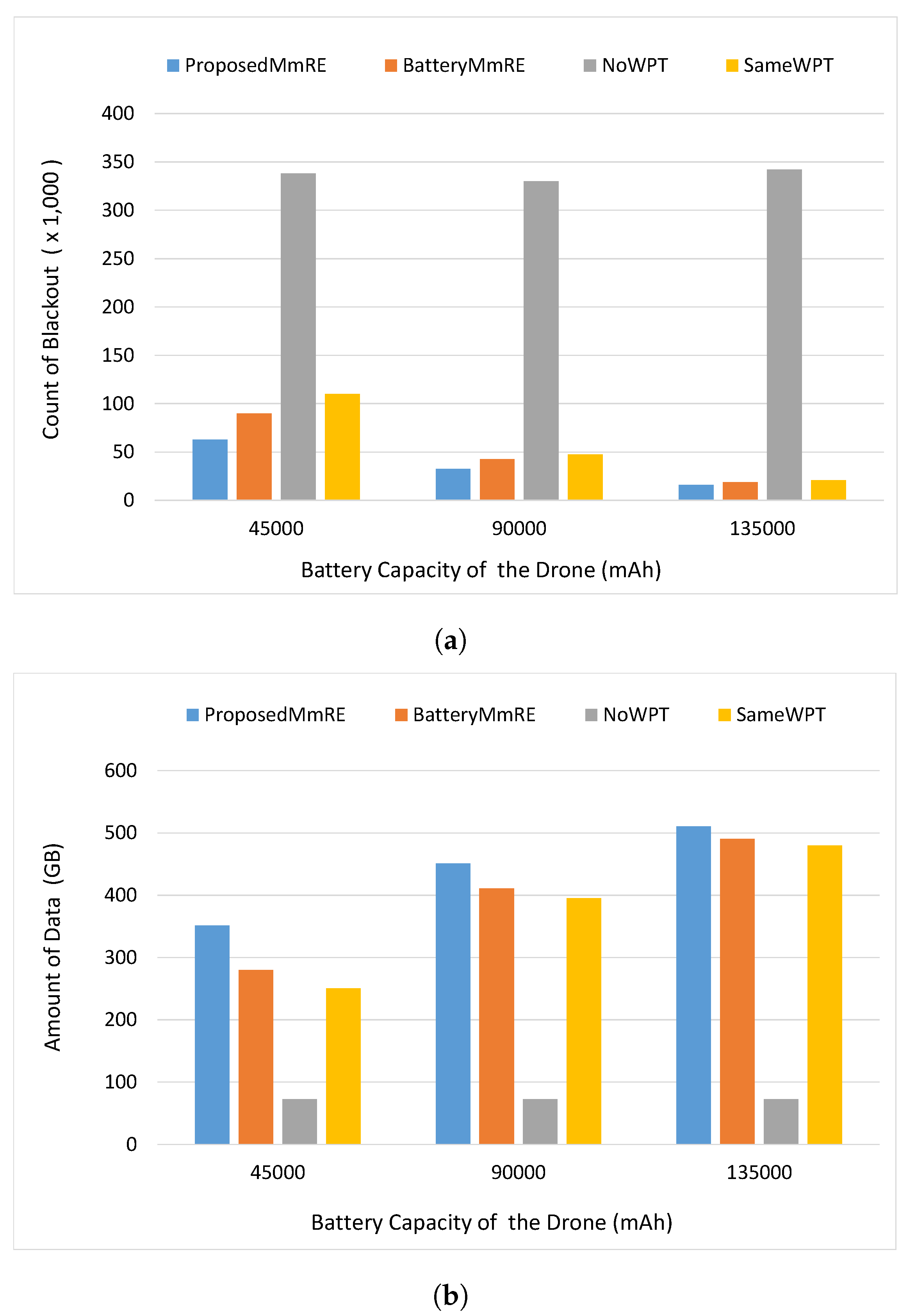
4.6. Comparison Based on Drone’s Battery Capacity
4.7. Example of Drone’s Energy Level Variations
4.8. Analysis of Time Complexity
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A study of LoRa: Long range & low power networks for the internet of things. Sensors 2016, 16, 1466–2016. [Google Scholar] [CrossRef]
- Eigner, H. Interference Analysis of LoRaWAN Systems. Ph.D. Thesis, TU Wien, Vienna, Austria, 2021. [Google Scholar]
- Sudevalayam, S.; Purushottam, K. Energy harvesting sensor nodes: Survey and implications. IEEE Commun. Surv. Tutor. 2010, 13, 443–461. [Google Scholar] [CrossRef]
- Sah, D.K.; Amgoth, T. Renewable energy harvesting schemes in wireless sensor networks: A survey. Inf. Fusion 2020, 63, 223–247. [Google Scholar] [CrossRef]
- Kanoun, O.; Bradai, S.; Khriji, S.; Bouattour, G.; El Houssaini, D.; Ben Ammar, M.; Naifar, S.; Bouhamed, A.; Derbel, F.; Viehweger, C. Energy-Aware System Design for Autonomous Wireless Sensor Nodes: A Comprehensive Review. Sensors 2021, 21, 548. [Google Scholar] [CrossRef] [PubMed]
- Cinco-Solis, A.; Camacho-Escoto, J.J.; Orozco-Barbosa, L.; Gomez, J. PPAASS: Practical Power-Aware Duty Cycle Algorithm for Solar Energy Harvesting Sensors. IEEE Access 2022, 10, 117855–117870. [Google Scholar] [CrossRef]
- Vilathgamuwa, D.M.; Sampath, J.P.K. Wireless power transfer (WPT) for electric vehicles (EVS)—Present and future trends. In Plug in Electric Vehicles in Smart Grids; Springer: Singapore, 2015; pp. 33–60. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, A. Wireless power transfer and applications to sensor networks. IEEE Wirel. Commun. 2013, 20, 140–145. [Google Scholar]
- Chen, J.; Chang, W.Y.; Ouyang, W. Efficient wireless charging pad deployment in wireless rechargeable sensor networks. IEEE Access 2020, 8, 39056–39077. [Google Scholar] [CrossRef]
- Yuksel, M.E.; Fidan, H. Energy-aware system design for batteryless LPWAN devices in IoT applications. Ad Hoc Netw. 2021, 122, 102625. [Google Scholar] [CrossRef]
- Giuliano, F.; Pagano, A.; Croce, D.; Vitale, G.; Tinnirello, I. Adaptive algorithms for batteryless lora-based sensors. Sensors 2023, 23, 6568. [Google Scholar] [CrossRef]
- Cheong, S.H.; Kang, M.; Kim, Y.; Park, M.; Park, J.; Noh, D.K. Solar-CTP: An Enhanced CTP for Solar-Powered Wireless Sensor Networks. IEEE Access 2020, 8, 127142–127155. [Google Scholar] [CrossRef]
- Zalk, J.V.; Behrens, P. The spatial extent of renewable and non-renewable power generation: A review and meta-analysis of power densities and their application in the U.S. Energy Policy 2018, 123, 83–91. [Google Scholar] [CrossRef]
- Kansal, A.; Potter, D.; Srivastava, M.B. Performance aware tasking forenvironmentally powered sensor networks. In Proceedings of the Joint International Conference on Measurement and Modeling of Computer Systems, New York, NY, USA, 10–14 June 2004; pp. 223–234. [Google Scholar]
- Moser, C.; Thiele, L.; Brunelli, D.; Benini, L. Adaptive power management in energy harvesting systems. In Proceedings of the Design, Automation and Test in Europe Conference and Exhibition, Nice, France, 16–20 April 2007; pp. 1–6. [Google Scholar]
- Noh, D.K.; Kang, K. Balanced energy allocation scheme for a solar-powered sensor system and its effects on network-wide performance. J. Comput. Syst. Sci. 2011, 77, 917–932. [Google Scholar] [CrossRef]
- Zhang, Y.; He, S.; Chen, J. Data gathering optimization by dynamic sensing and routing in rechargeable sensor networks. IEEE/ACM Trans. Netw. 2016, 24, 1632–1646. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, L.; Noh, D.K.; Le, H.K.; Abdelzaher, T.F. SolarStore: Enhancing data reliability in solar-powered storage-centric sensor networks. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Kraków, Poland, 22–25 June 2009; pp. 333–346. [Google Scholar]
- Hu, Y.; Yuan, X.; Zhang, G.; Schmeink, A. Sustainable Wireless Sensor Networks with UAV-Enabled Wireless Power Transfer. IEEE Trans. Veh. Technol. 2021, 70, 8050–8064. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Optimal UAV route in wireless charging sensor networks. IEEE Internet Things J. 2019, 7, 1327–1335. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Jiang, M.; Li, Y.; Zhang, Q.; Qin, J. Joint position and time allocation optimization of UAV enabled wireless powered communication networks. IEEE Trans. Commun. 2019, 67, 3806–3816. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, X.; Xu, J.; Schmeink, A. Optimal 1D trajectory design for UAV-Enabled multiuser wireless power transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, T.; Hu, Y.; Xu, J.; Schemink, A. UAV trajectory design for UAV-Enabled multiuser nonlinear wireless power transfer. IEEE Trans. Wirel. Commun. 2021, 20, 1105–1121. [Google Scholar] [CrossRef]
- Guo, S.; Wang, F.; Yang, Y.; Xiao, B. Energy-efficient cooperative for simultaneous wireless information and power transfer in clustered wireless sensor networks. IEEE Trans. Commun. 2015, 63, 4405–4417. [Google Scholar] [CrossRef]
- Sansoy, M.; Buttar, A.S.; Goyal, R. Empowering wireless sensor networks with rf energy harvesting. In Proceedings of the 7th International Conference on Signal Processing and Integrated Networks (SPIN 2020), Noida, India, 27–28 February 2020; pp. 273–277. [Google Scholar]
- Kotary, J.; Fioretto, F.; van Hentenryck, P.; Wilder, B. End-to-end constrained optimization learning: A survey. arXiv 2021, arXiv:2103.16378. [Google Scholar]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004; ISBN 0-521-83378-7. [Google Scholar]
- Stern, R.; Kiesel, S.; Puzis, R.; Felner, A.; Ruml, W. Max is more than min: Solving maximization problems with heuristic search. In Proceedings of the 2014 International Symposium on Combinatorial Search, Prague, Czech Republic, 15–17 August 2014; Volume 5, pp. 148–156. [Google Scholar]
- Yi, J.M.; Kang, M.J.; Noh, D.K. SolarCastalia: Solar energy harvesting wireless sensor network simulator. Int. J. Distrib. Sens. Netw. 2015, 11, 415174. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Power Density |
|---|---|
| Solar | 6.63 W/m2 |
| Geothermal | 2.24 W/m2 |
| Wind | 1.84 W/m2 |
| Hydro | 0.14 W/m2 |
| Biomass | 0.08 W/m2 |
| Parameter | Value |
|---|---|
| Simulation time | 10,080 ticks |
| Period of drone’s charging | 1 h |
| Field size | 1 km × 1 km |
| Number of nodes | 10,000 |
| Sensor node battery capacity | 150 mAh |
| Sensing data transfer rate | 1 kB/min |
| LoRa data transmission range | 2 km |
| Amount of harvested energy | 15–25 J/day |
| Amount of consumed energy | 15–25 J/day |
| Duty cycle | 0.5 |
| Battery capacity of drone for WPT | 15,000 mAh |
| Hovering height of drone (H in Equation (5)) | 5 m |
| Total hovering time (T in Equation (13)) | 1 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Y.; Yoon, I.; Noh, D.K. Optimizing the Charging Mobility of WPT-Enabled UAV to Enhance the Stability of Solar-Powered LoRaWAN IoT. Energies 2024, 17, 1617. https://doi.org/10.3390/en17071617
Gong Y, Yoon I, Noh DK. Optimizing the Charging Mobility of WPT-Enabled UAV to Enhance the Stability of Solar-Powered LoRaWAN IoT. Energies. 2024; 17(7):1617. https://doi.org/10.3390/en17071617
Chicago/Turabian StyleGong, Yujin, Ikjune Yoon, and Dong Kun Noh. 2024. "Optimizing the Charging Mobility of WPT-Enabled UAV to Enhance the Stability of Solar-Powered LoRaWAN IoT" Energies 17, no. 7: 1617. https://doi.org/10.3390/en17071617
APA StyleGong, Y., Yoon, I., & Noh, D. K. (2024). Optimizing the Charging Mobility of WPT-Enabled UAV to Enhance the Stability of Solar-Powered LoRaWAN IoT. Energies, 17(7), 1617. https://doi.org/10.3390/en17071617