
On the Effect of Nonlinear Damping Sources in Output-Only Identification Methods Applied to Floating Wind Turbines



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
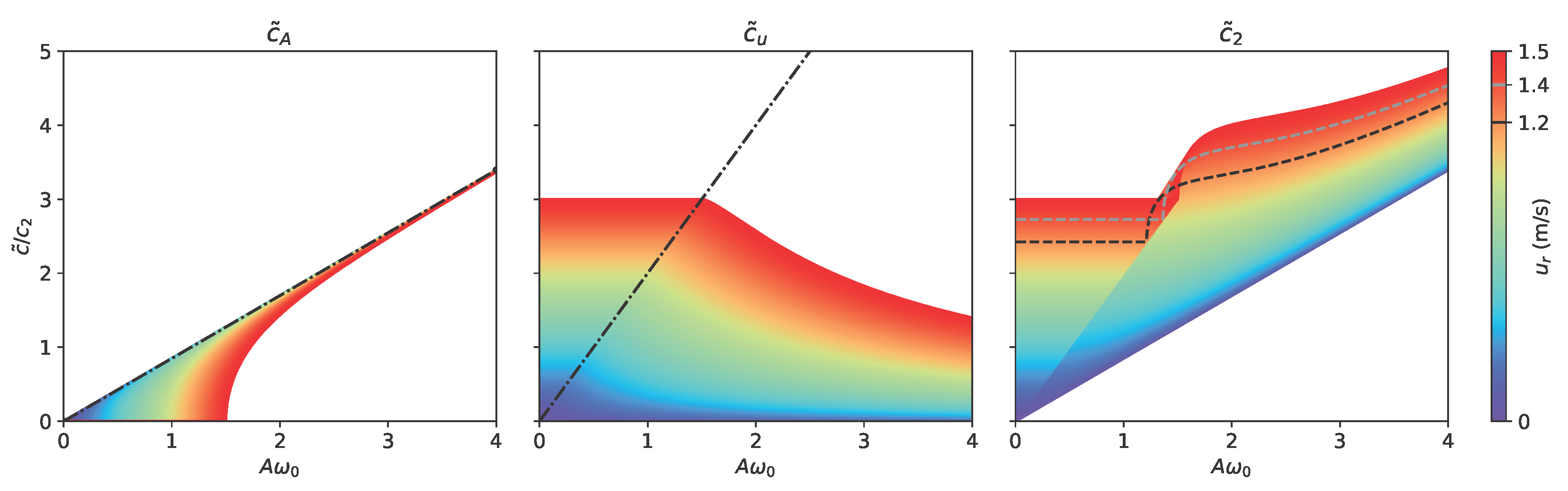
2. Theoretical Background
3. Methods for Modal Identification
3.1. Logarithmic Decay Method
3.2. Stochastic Subspace Identification
4. Simplified Single Degree of Freedom Model
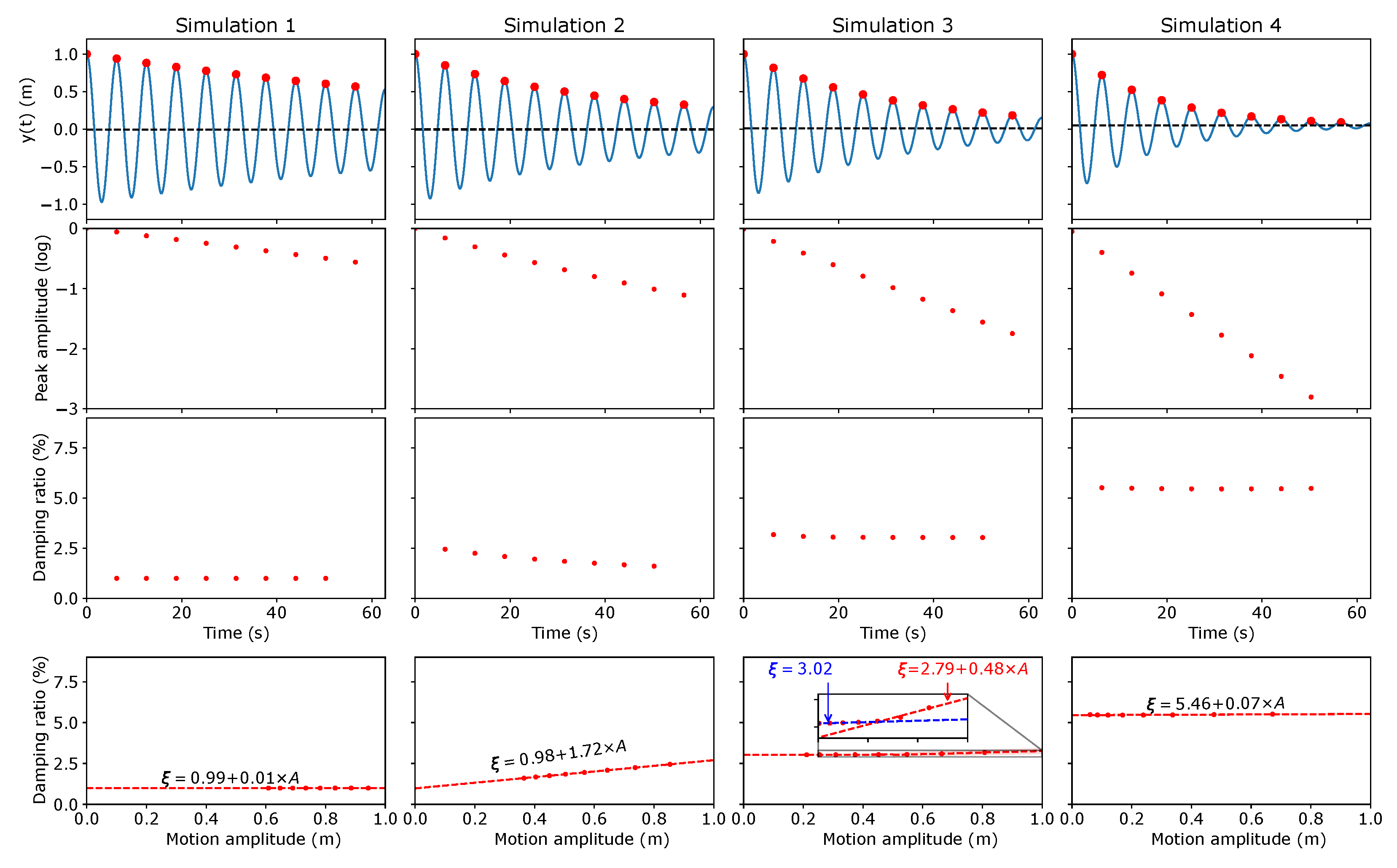
- Simulation 1: , , m/s
- Simulation 2: , , m/s
- Simulation 3: , , m/s
- Simulation 4: , , m/s
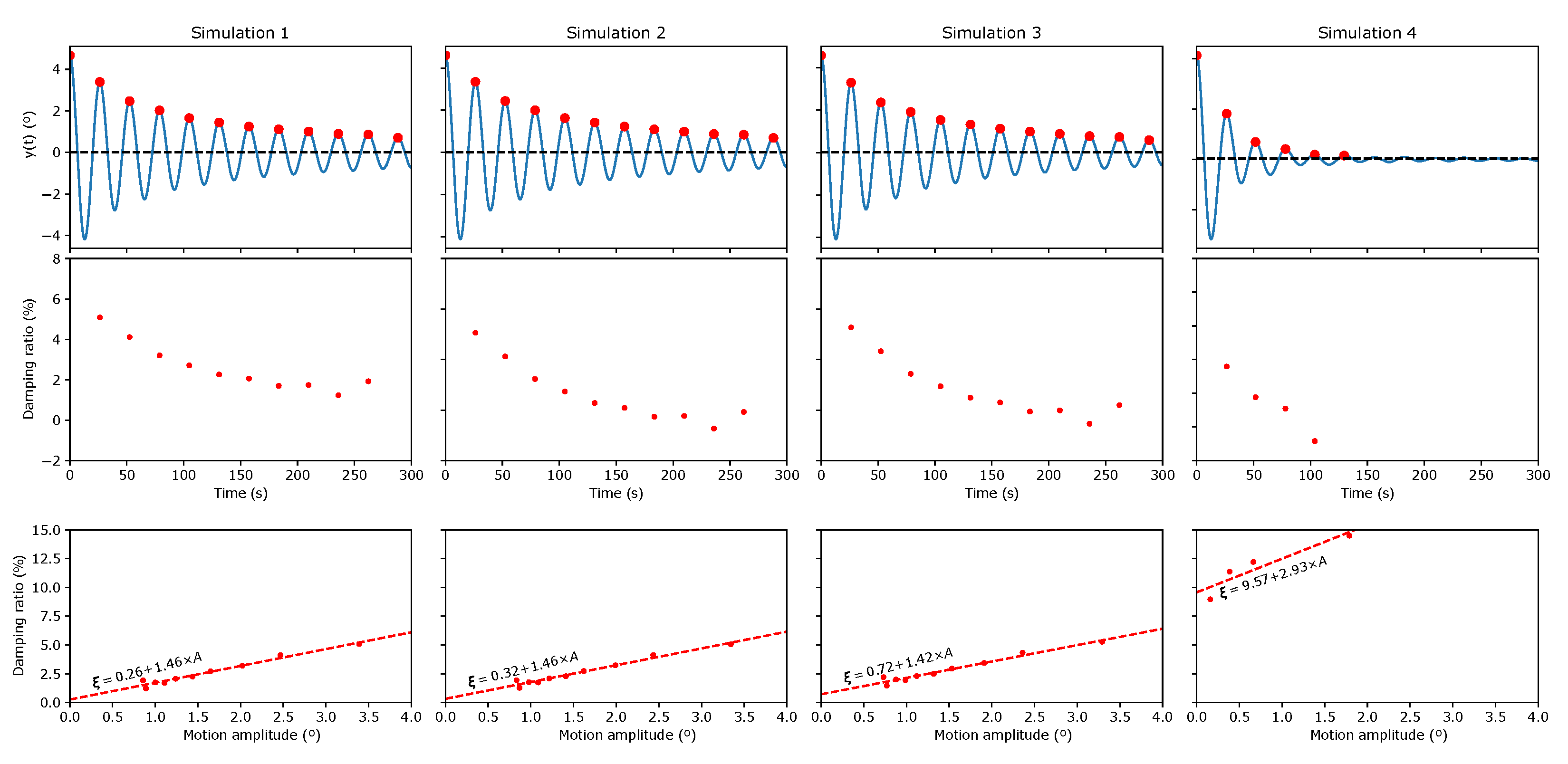
4.1. Free-Decay Analysis
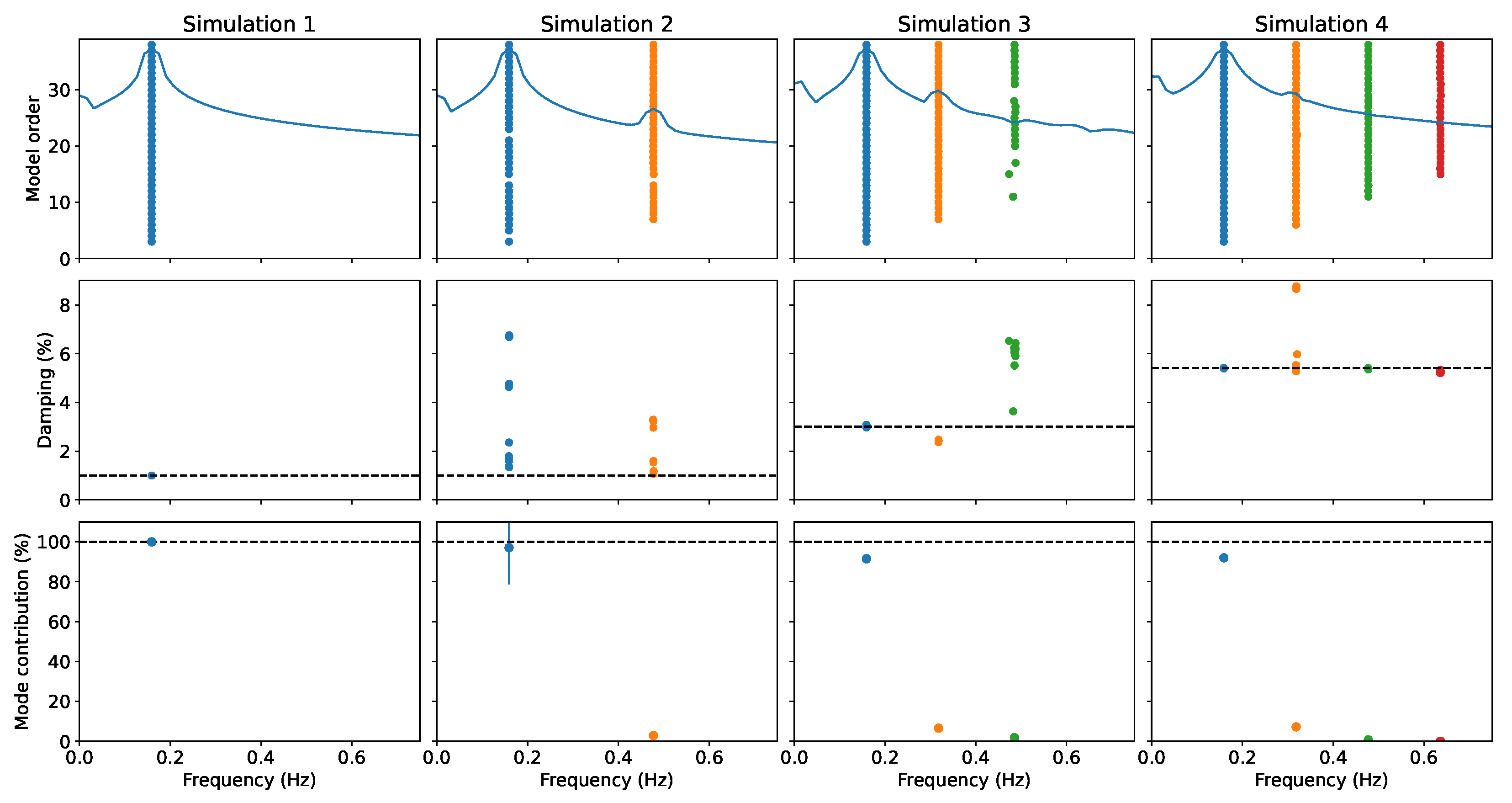
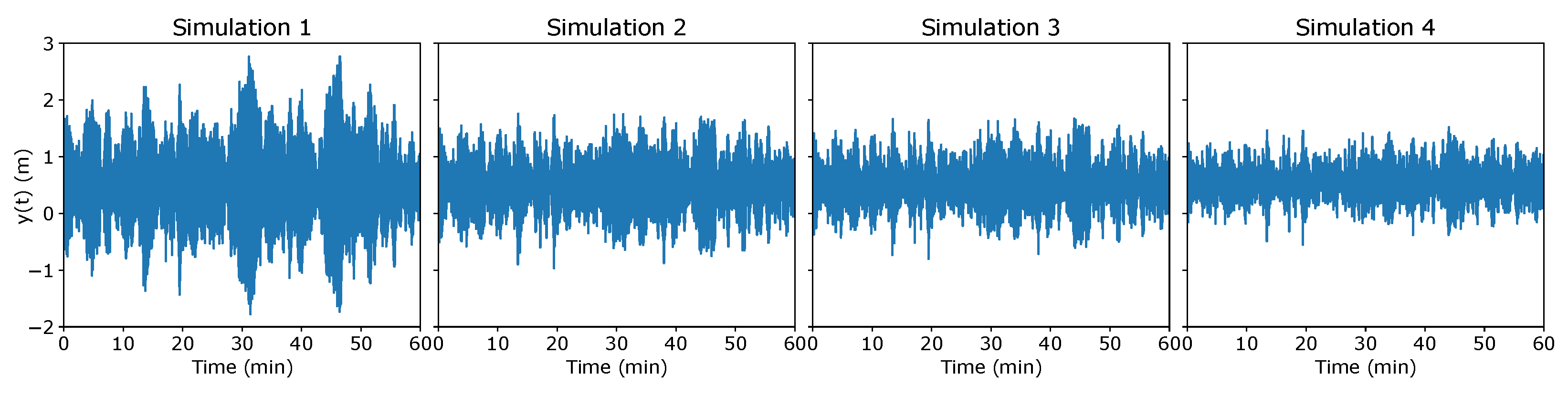
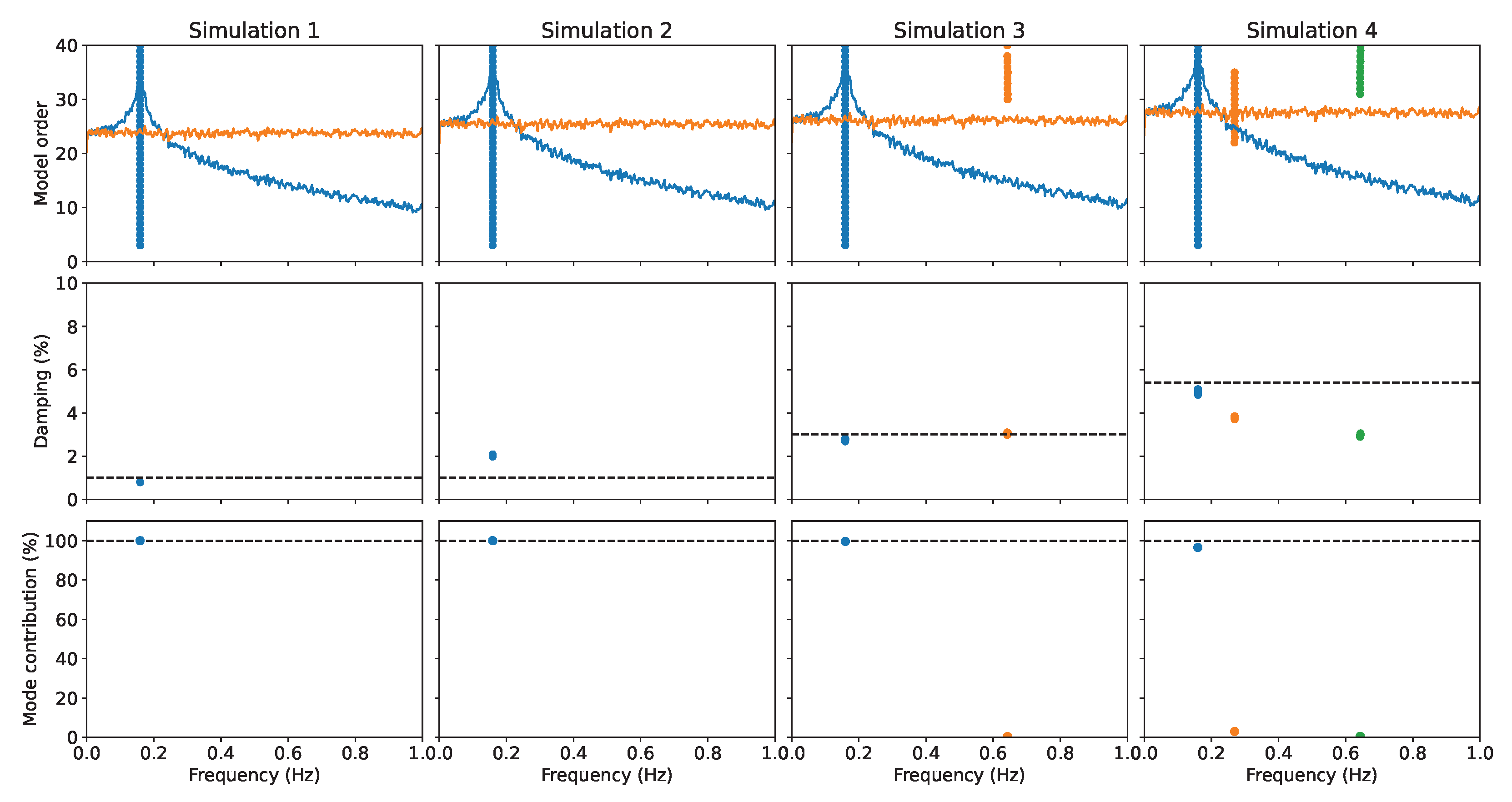
4.2. Stochastic Excitation
5. Numerical Validation with Full Aeroelastic Simulations
5.1. Numerical Model Description
5.2. Free-Decay Analysis
- Simulation 1: reference scenario without currents nor wind;
- Simulation 2: sea current with a velocity of 0.25 m/s, no wind;
- Simulation 3: 3 m/s steady wind field, parked rotor;
- Simulation 4: 22 m/s steady wind field, normal-operation rotor with a constant angular velocity of 12.1 RPM (revolutions per minute).
5.3. Stochastic Excitation
- Wind field 1: 2.5 m/s mean wind speed with a 10% turbulence intensity;
- Wind field 2: 2.5 m/s mean wind speed with a 26% turbulence intensity;
- Wind field 3: 6.5 m/s mean wind speed with a 10% turbulence intensity.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DBSCAN | Density-based spatial clustering of applications with noise |
| NREL | National Renewable Energy Laboratory |
| RPM | Revolutions per minute |
| SSI-COV | Covariance-driven stochastic subspace identification |
References
- Magalhães, F.; Cunha, A. Explaining operational modal analysis with data from an arch bridge. Mech. Syst. Signal Process. 2011, 25, 1431–1450. [Google Scholar] [CrossRef]
- Zhang, L.; Brincker, R. An Overview of Operational Modal Analysis: Major Development and Issues. In Proceedings of the International Modal Analysis Conference, Copenhagen, Denmark, 26–27 April 2005. [Google Scholar]
- Rainieri, C.; Fabbrocino, G. Output-only Modal Identification BT. In Operational Modal Analysis of Civil Engineering Structures: An Introduction and Guide for Applications; Springer: New York, NY, USA, 2014; pp. 103–210. [Google Scholar] [CrossRef]
- Devriendt, C.; Magalhães, F.; Weijtjens, W.; Sitter, G.D.; Cunha, A.; Guillaume, P. Structural health monitoring of offshore wind turbines using automated operational modal analysis. Struct. Health Monit. 2014, 13, 644–659. [Google Scholar] [CrossRef]
- Weijtjens, W.; Verbelen, T.; De Sitter, G.; Devriendt, C. Foundation structural health monitoring of an offshore wind turbine—A full-scale case study. Struct. Health Monit. 2015, 15, 389–402. [Google Scholar] [CrossRef]
- Xu, M.; Au, F.T.K.; Wang, S.; Wang, Z.; Peng, Q.; Tian, H. Dynamic response analysis of a real-world operating offshore wind turbine under earthquake excitations. Ocean Eng. 2022, 266, 112791. [Google Scholar] [CrossRef]
- Hines, E.M.; Baxter, C.D.P.; Ciochetto, D.; Song, M.; Sparrevik, P.; Meland, H.J.; Strout, J.M.; Bradshaw, A.; Hu, S.L.; Basurto, J.R.; et al. Structural instrumentation and monitoring of the Block Island Offshore Wind Farm. Renew. Energy 2023, 202, 1032–1045. [Google Scholar] [CrossRef]
- Ruzzo, C.; Failla, G.; Collu, M.; Nava, V.; Fiamma, V.; Arena, F. Operational Modal Analysis of a Spar-Type Floating Platform Using Frequency Domain Decomposition Method. Energies 2016, 9, 870. [Google Scholar] [CrossRef]
- Ruzzo, C.; Failla, G.; Collu, M.; Nava, V.; Fiamma, V.; Arena, F. Output-only identification of rigid body motions of floating structures: A case study. Procedia Eng. 2017, 199, 930–935. [Google Scholar] [CrossRef]
- Pimenta, F.; Ribeiro, D.; Román, A.; Magalhães, F. Modal properties of floating wind turbines: Analytical study and operational modal analysis of an utility-scale wind turbine. Eng. Struct. 2024, 301, 117367. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems: Theory, Implementation, Applications; Springer: New York, NY, USA, 2012. [Google Scholar]
- Falzarano, J.M.; Clague, R.E.; Kota, R.S. Application of Nonlinear Normal Mode Analysis to the Nonlinear and Coupled Dynamics of a Floating Offshore Platform with Damping. Nonlinear Dyn. 2001, 25, 255–274. [Google Scholar] [CrossRef]
- Liagre, P.F.; Niedzwecki, J.M. Estimating nonlinear coupled frequency-dependent parameters in offshore engineering. Appl. Ocean Res. 2003, 25, 1–19. [Google Scholar] [CrossRef]
- Al-hababi, T.; Cao, M.; Saleh, B.; Alkayem, N.F.; Xu, H. A Critical Review of Nonlinear Damping Identification in Structural Dynamics: Methods, Applications, and Challenges. Sensors 2020, 20, 7303. [Google Scholar] [CrossRef] [PubMed]
- Colin, M.; Thomas, O.; Grondel, S.; Cattan, E. Very large amplitude vibrations of flexible structures: Experimental identification and validation of a quadratic drag damping model. J. Fluids Struct. 2020, 97, 103056. [Google Scholar] [CrossRef]
- Géradin, M.; Rixen, D.J. Mechanical Vibrations: Theory and Application to Structural Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Anderson, J.D. Fundamentals of Aerodynamics, 6th ed.; Aeronautical and Aerospace Engineering Series; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Elliott, S.J.; Tehrani, M.G.; Langley, R.S. Nonlinear damping and quasi-linear modelling. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140402. [Google Scholar] [CrossRef] [PubMed]
- Kerschen, G.; Worden, K.; Vakakis, A.F.; Golinval, J.C. Past, present and future of nonlinear system identification in structural dynamics. Mech. Syst. Signal Process. 2006, 20, 505–592. [Google Scholar] [CrossRef]
- Jeary, A.P. Damping in tall buildings—A mechanism and a predictor. Earthq. Eng. Struct. Dyn. 1986, 14, 733–750. [Google Scholar] [CrossRef]
- Jeary, A.P. The description and measurement of nonlinear damping in structures. J. Wind Eng. Ind. Aerodyn. 1996, 59, 103–114. [Google Scholar] [CrossRef]
- Overschee, P.V.; Moor, B.D. Subspace Identification for Linear Systems; Kluwer Academic Publishers: Leuven, Belgium, 1996. [Google Scholar]
- Quallen, S.; Xing, T. CFD simulation of a floating offshore wind turbine system using a variable-speed generator-torque controller. Renew. Energy 2016, 97, 230–242. [Google Scholar] [CrossRef]
- Magalhães, F. Operational Modal Analysis for Testing and Monitoring of Bridges and Special Structures. Ph.D. Thesis, Faculty of Engineering of the University of Porto, Porto, Portugal, 2010. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; KDD’96. pp. 226–231. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report 38060; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; Technical Report 60601; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar] [CrossRef]
- Jonkman, B.J.; Buhl, M.L., Jr. TurbSim User’s Guide; Technical Report 39797; National Renewable Energy Laboratory: Golden, CO, USA, 2006. [Google Scholar]
- Hall, M. MoorDyn User’s Guide; Technical Report; Department of Mechanical Engineering, University of Maine: Orono, ME, USA, 2015. [Google Scholar]
- Pimenta, F.; Ruzzo, C.; Failla, G.; Arena, F.; Alves, M.; Magalhães, F. Dynamic Response Characterization of Floating Structures Based on Numerical Simulations. Energies 2020, 13, 5670. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pimenta, F.; Pedrelli, V.L.; Vanelli, T.; Magalhães, F. On the Effect of Nonlinear Damping Sources in Output-Only Identification Methods Applied to Floating Wind Turbines. Energies 2024, 17, 1671. https://doi.org/10.3390/en17071671
Pimenta F, Pedrelli VL, Vanelli T, Magalhães F. On the Effect of Nonlinear Damping Sources in Output-Only Identification Methods Applied to Floating Wind Turbines. Energies. 2024; 17(7):1671. https://doi.org/10.3390/en17071671
Chicago/Turabian StylePimenta, Francisco, Vitor Liotto Pedrelli, Thea Vanelli, and Filipe Magalhães. 2024. "On the Effect of Nonlinear Damping Sources in Output-Only Identification Methods Applied to Floating Wind Turbines" Energies 17, no. 7: 1671. https://doi.org/10.3390/en17071671
APA StylePimenta, F., Pedrelli, V. L., Vanelli, T., & Magalhães, F. (2024). On the Effect of Nonlinear Damping Sources in Output-Only Identification Methods Applied to Floating Wind Turbines. Energies, 17(7), 1671. https://doi.org/10.3390/en17071671