
Dynamic Decoupling Method Based on Motor Dynamic Compensation with Application for Precision Mechatronic Systems


Abstract
:1. Introduction
- (1)
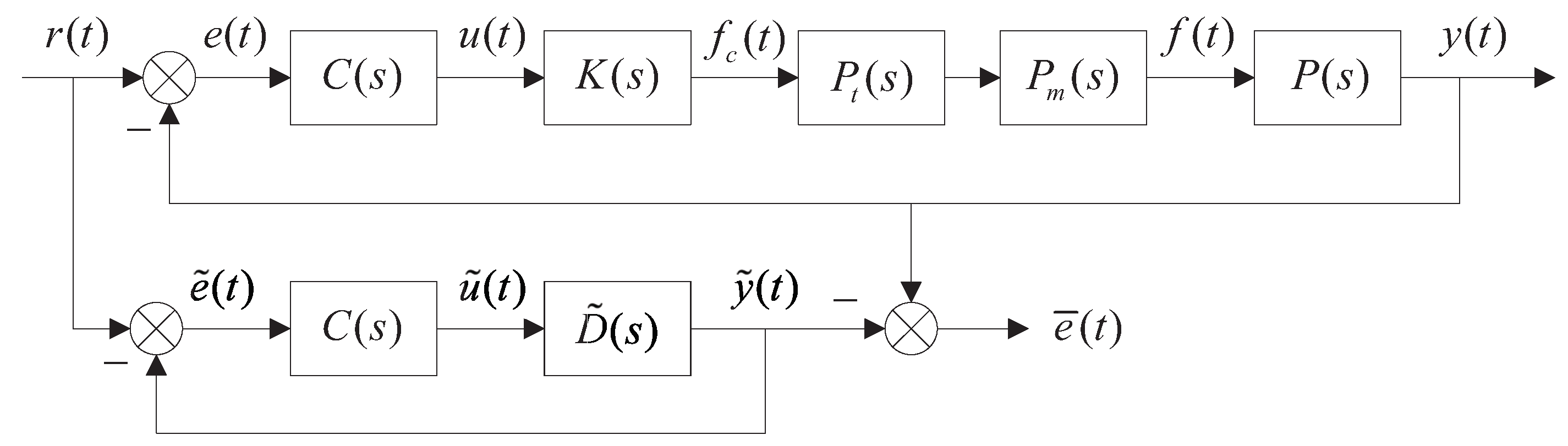
- A dynamic decoupling control method is established in this paper, based on the compensation for the motor dynamics and the transmission delays.
- (2)
- A data-driven optimization method is developed in this paper to estimate the unknown parameters of the dynamic decoupling controller, requiring only minimal model information. Furthermore, the proposed method is non-iterative, necessitating only a single experiment.
2. Problem Formulation
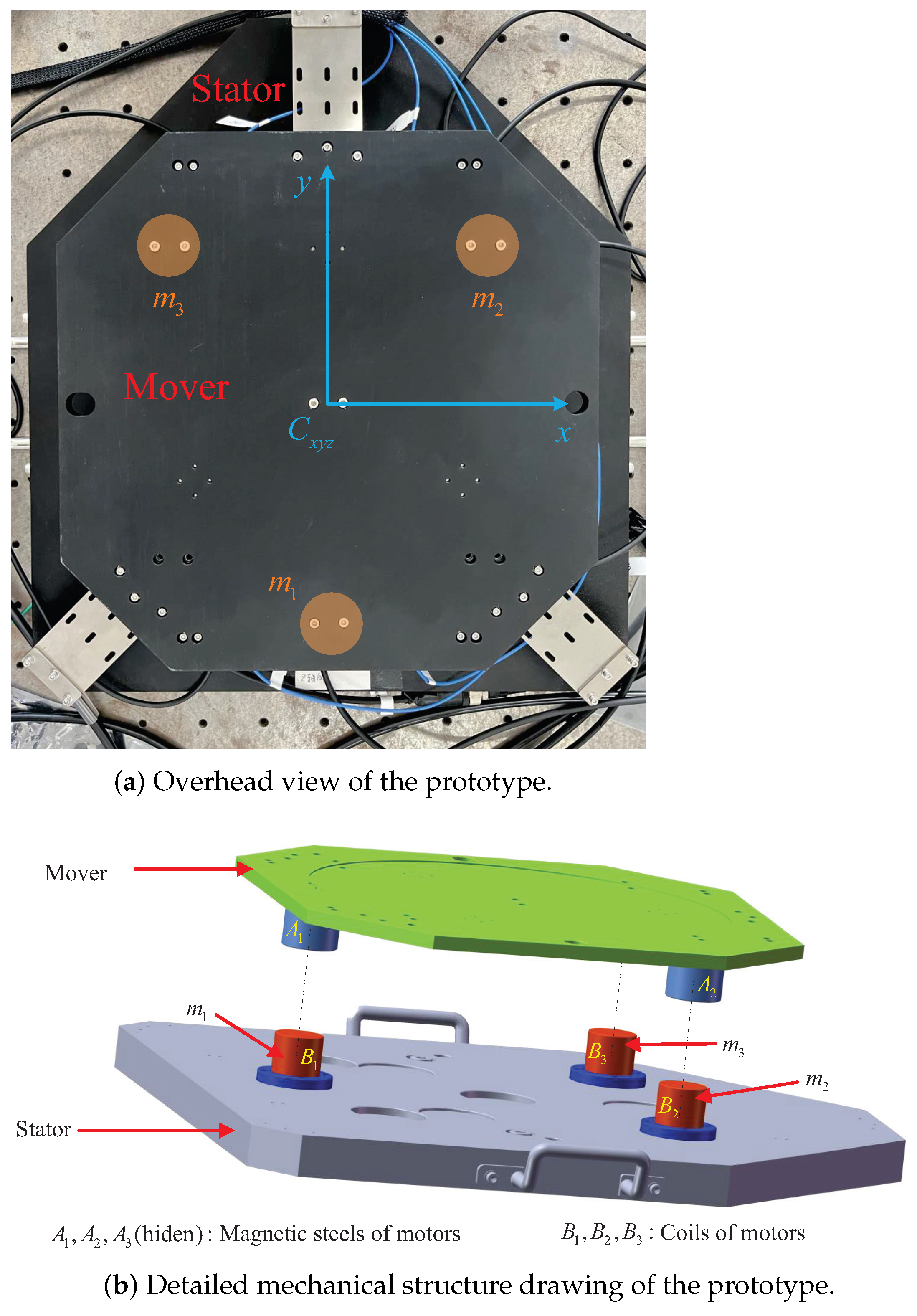
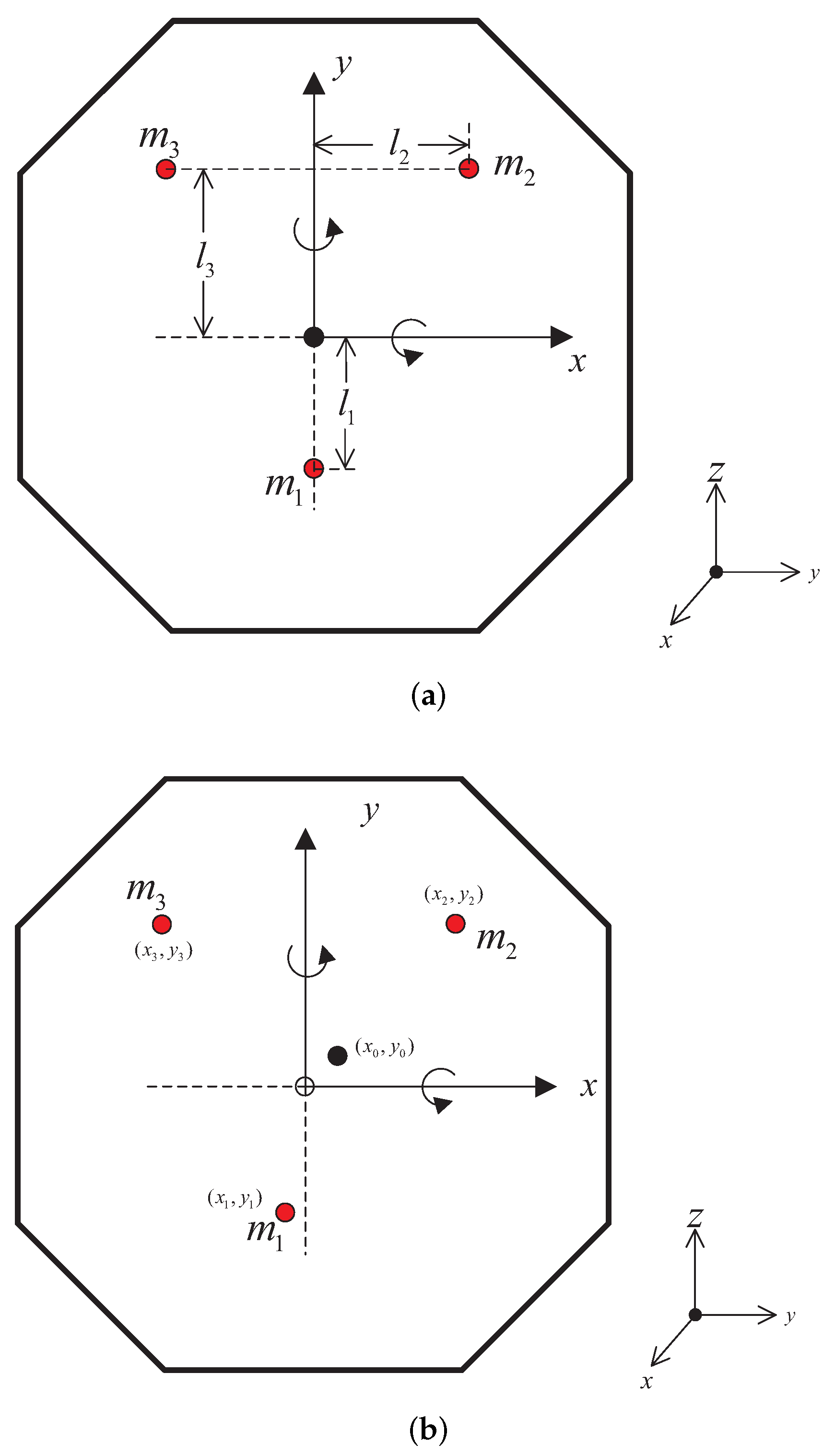
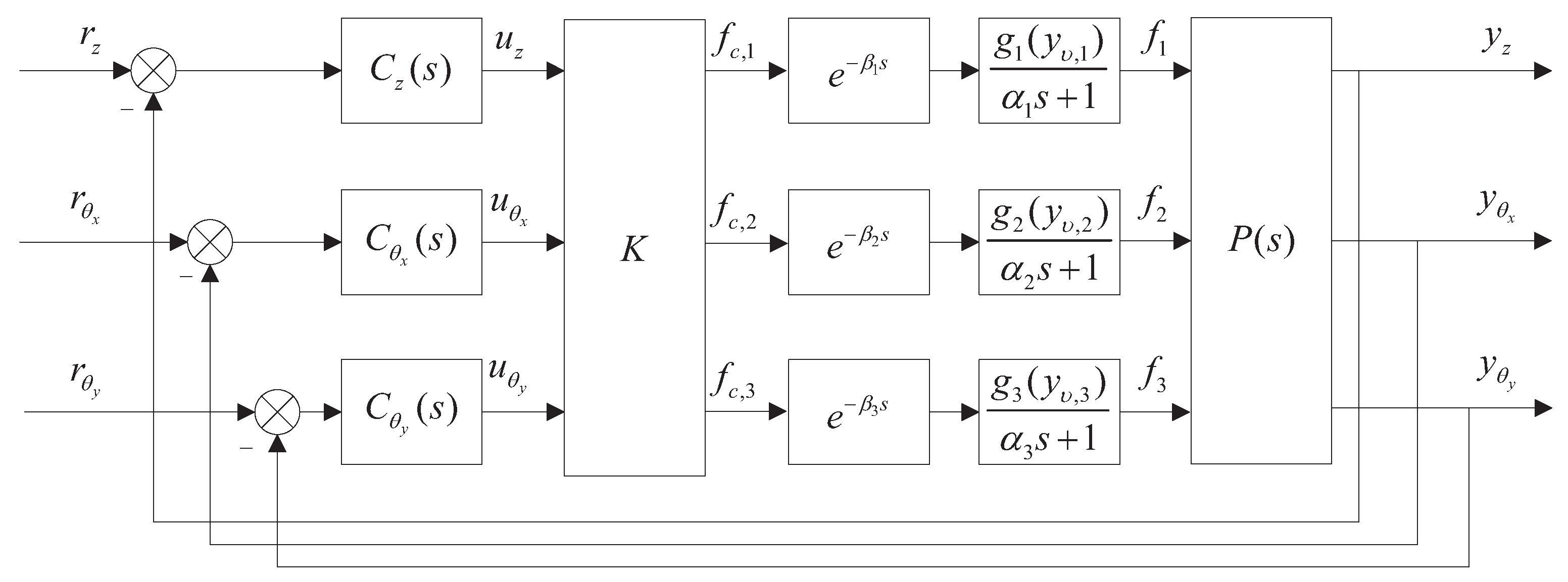
2.1. Control Configuration of the Multiple DoFs Mechatronic System
2.2. Description of Nominal Static Decoupling Method
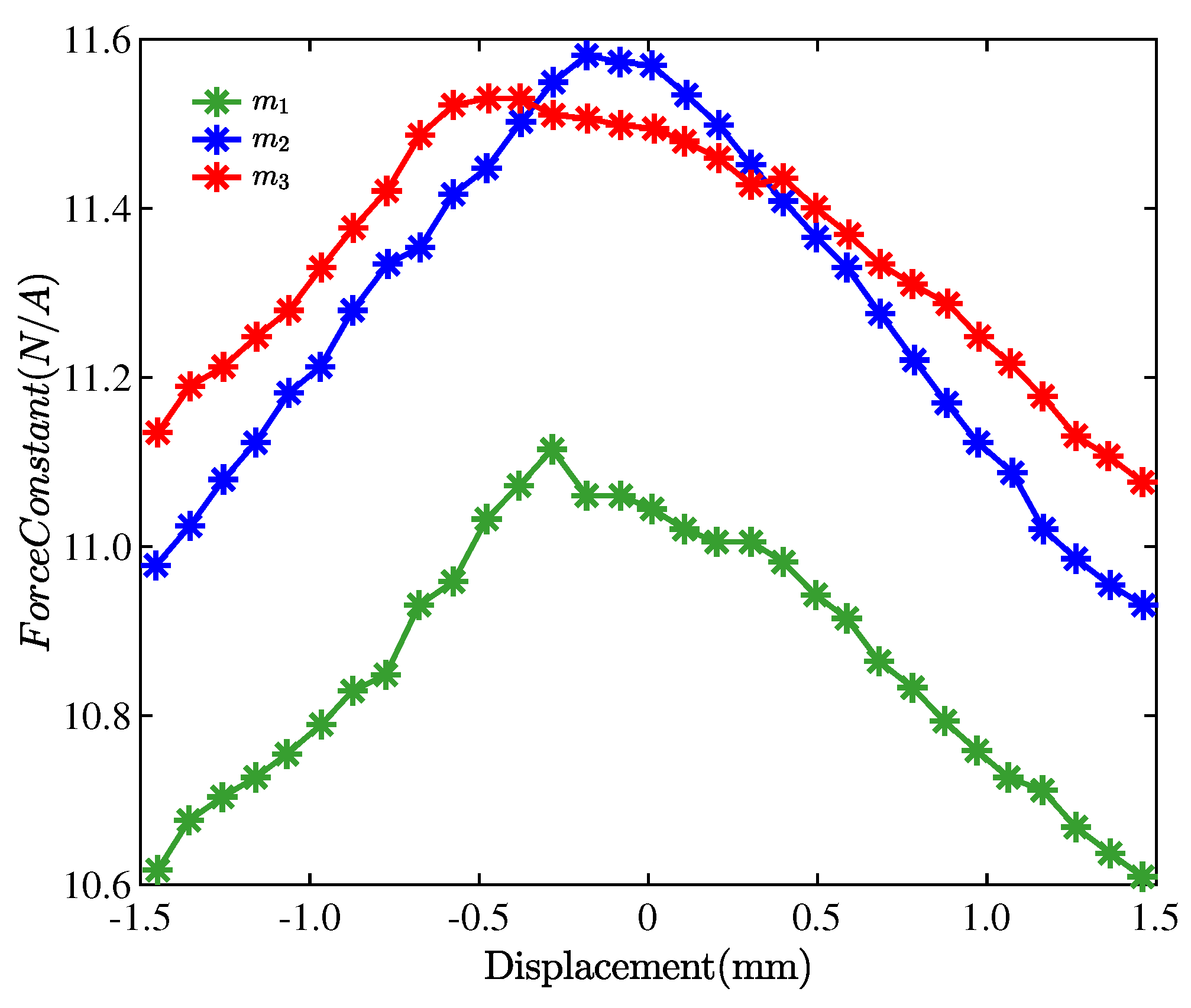
2.3. Formulation of Factors Causing Incomplete Decoupling
3. Data-Driven Optimization Method
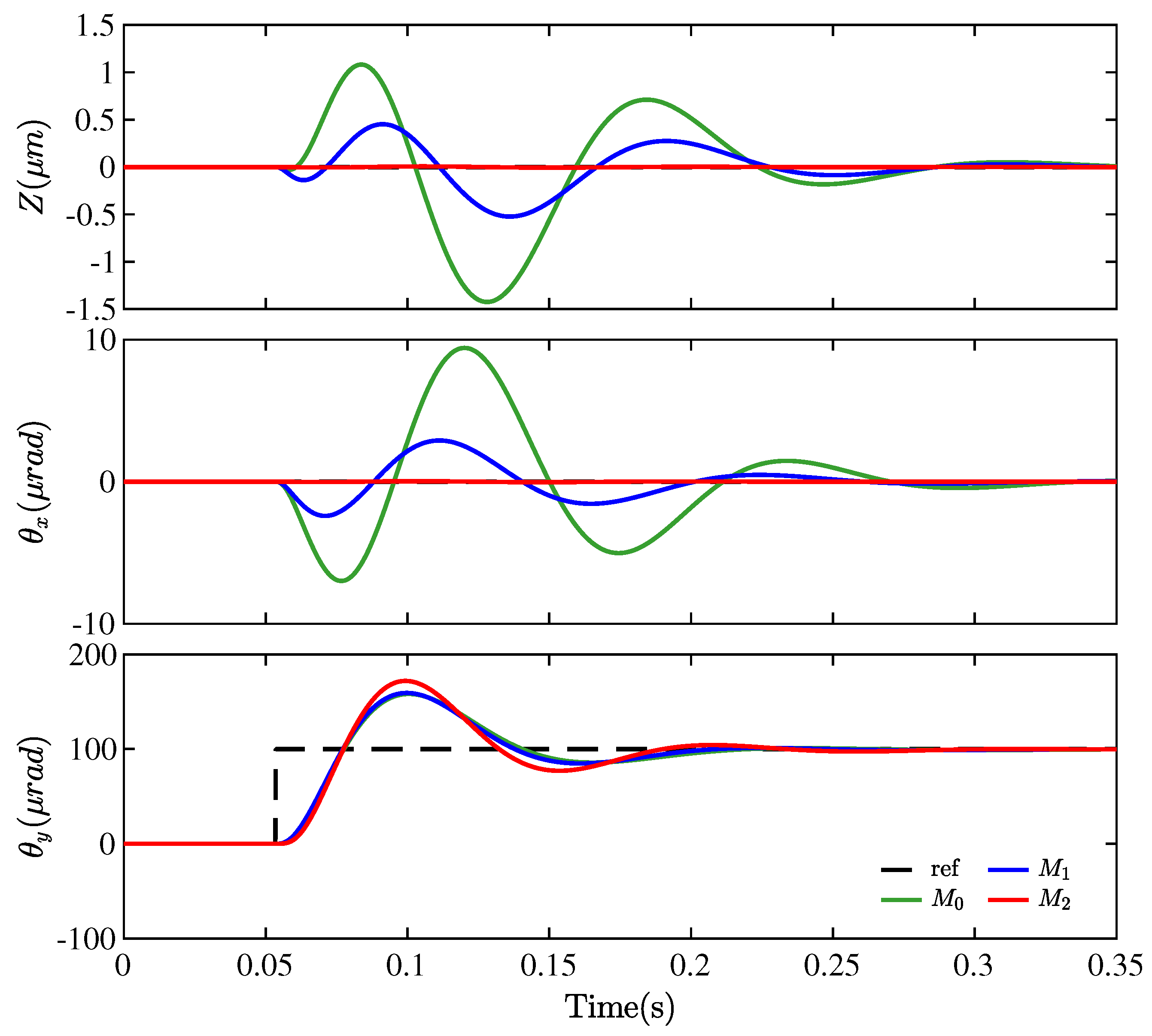
4. Simulations Results
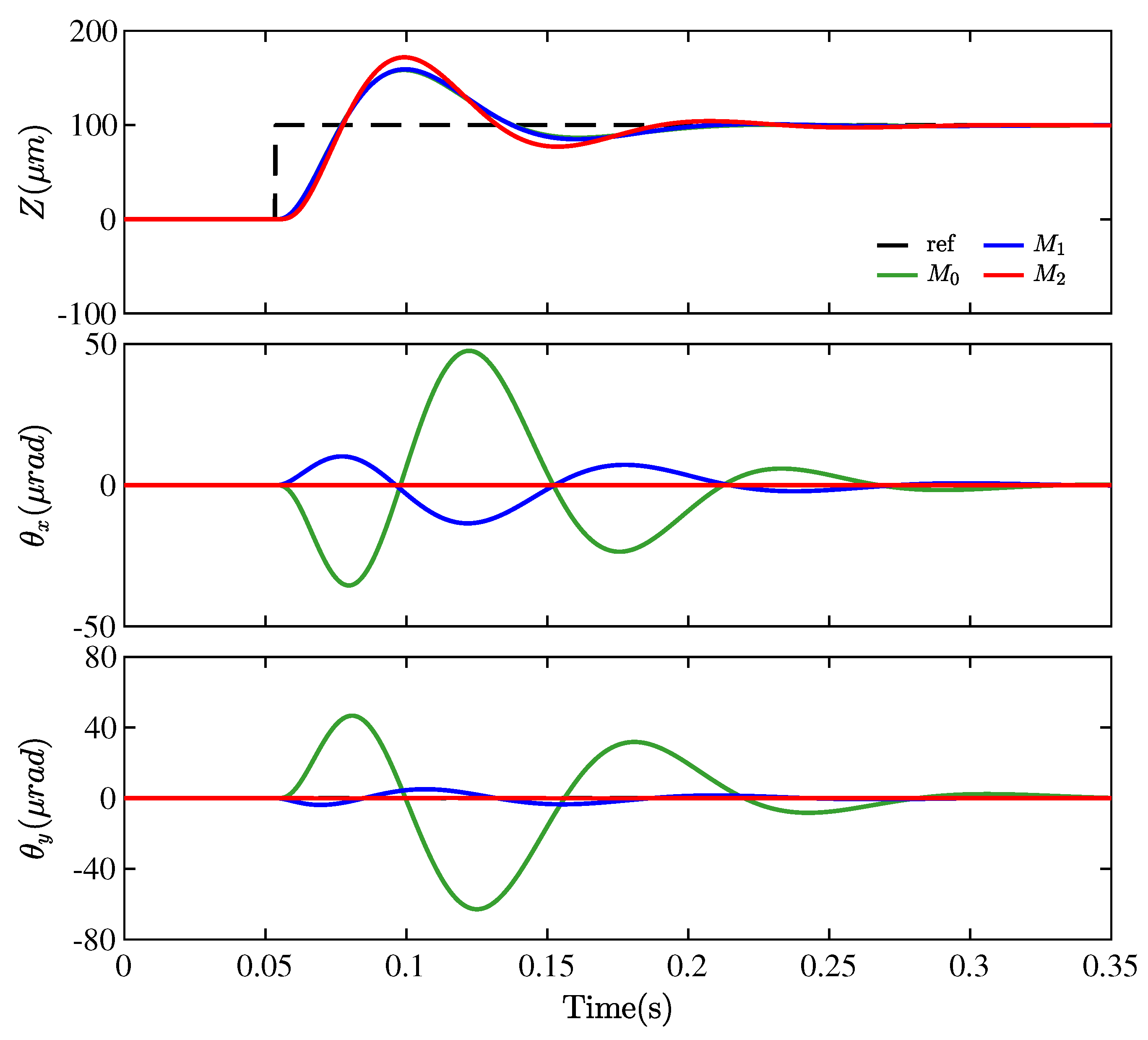
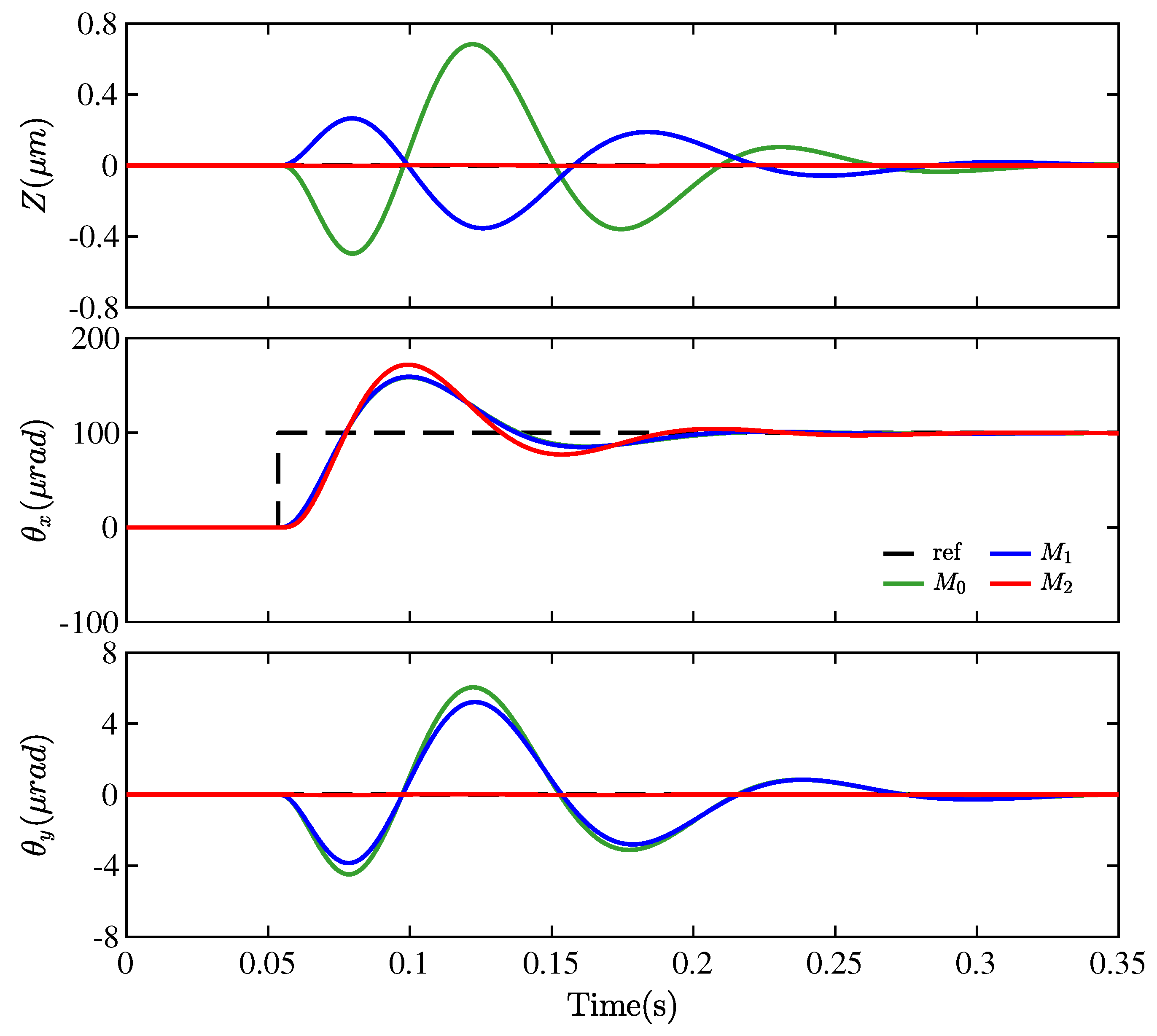
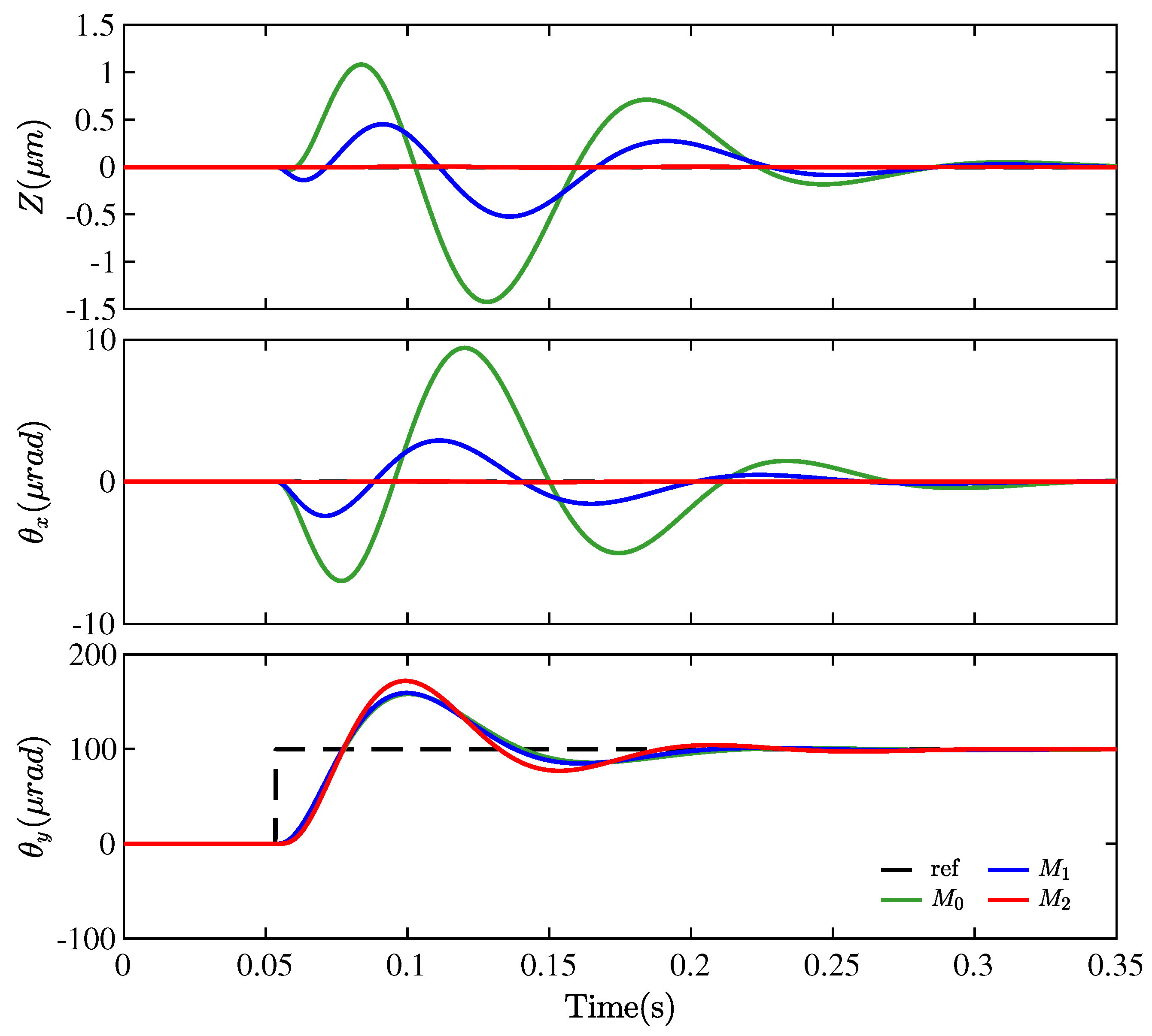
- (1)
- : the nominal static decoupling control method.
- (2)
- : the ideal static decoupling control method.
- (3)
- : the proposed dynamic decoupling control method.
4.1. Simulation Setup
4.2. Performance Assessment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CoM | Center of mass |
| DoF | Degree of freedom |
| DoFs | Degrees of freedom |
| ETF | Equivalent transfer function |
| MIMO | Multiple-input multiple output |
| SAC | Sum of the absolute value of the maximum value of cross-talk |
| SISO | Single-input single-output |
| VRFT | Virtual reference feedback tuning |
References
- Incremona, G.P.; Ferrara, A.; Magni, L. MPC for Robot Manipulators With Integral Sliding Modes Generation. IEEE-ASME Trans. Mechatron. 2017, 3, 1299–1307. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhou, Z.; Huang, H. A multi-frequency MIMO control method for the 6DOF micro-vibration exciting system. Acta Astronaut. 2020, 170, 552–569. [Google Scholar] [CrossRef]
- Hanifzadegan, M.; Nagamune, R. Contouring Control of CNC Machine Tools Based on Linear Parameter-Varying Controllers. IEEE-ASME Trans. Mechatron. 2016, 5, 2522–2530. [Google Scholar] [CrossRef]
- Jeon, T.; Kim, D.; Song, Y.; Paek, I. Design and Validation of Demanded Power Point Tracking Control Algorithm for MIMO Controllers in Wind Turbines. Energies 2021, 18, 5818. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, Z.; Zhu, H.; Li, X.; Tomizuka, M.; Lee, T.H. Convex Parameterization and Optimization for Robust Tracking of a Magnetically Levitated Planar Positioning System. IEEE Trans. Ind. Electron. 2022, 4, 3798–3809. [Google Scholar] [CrossRef]
- Song, F.; Liu, Y.; Jin, W.; Tan, J.; He, W. Data-Driven Feedforward Learning With Force Ripple Compensation for Wafer Stages: A Variable-Gain Robust Approach. IEEE Trans. Neural Netw. Learn. Syst. 2022, 4, 1594–1608. [Google Scholar] [CrossRef] [PubMed]
- Schitter, G. Advanced Mechatronics for Precision Engineering and Mechatronic Imaging Systems. IFAC Pap. 2015, 1, 942. [Google Scholar] [CrossRef]
- Butler, H. Position Control in Lithographic Equipment An Enabler for Current-Day Chip Manufacturing. IEEE Control Syst. Mag. 2011, 5, 28–47. [Google Scholar]
- Heertjes, M.; Hennekens, D.; Steinbuch, M. MIMO feed-forward design in wafer scanners using a gradient approximation-based algorithm. Control Eng. Pract. 2010, 5, 495–506. [Google Scholar] [CrossRef]
- Barros, C.P.B.; Butler, H.; van de Wijdeven, J.; Tóth, R. On feedforward control of piezoelectric dual-stage actuator systems. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 14–17 December 2021; pp. 5588–5594. [Google Scholar]
- Poot, M.; Portegies, J.; Mooren, N.; van Haren, M.; van Meer, M.; Oomen, T. Gaussian Processes for Advanced Motion Control. IEEJ J. Ind. Appl. 2022, 3, 396–407. [Google Scholar]
- Li, B.; Zhou, X.; Ning, Z.; Guan, X.; Yiu, K.-F.C. Dynamic event-triggered security control for networked control systems with cyber-attacks: A model predictive control approach. Inf. Sci. 2022, 612, 384–398. [Google Scholar] [CrossRef]
- Zhao, D.; Xia, L.; Dang, H.; Wu, Z.; Li, H. Design and control of air supply system for PEMFC UAV based on dynamic decoupling strategy. Energy Convers. Manag. 2022, 253, 115159. [Google Scholar] [CrossRef]
- Hagglund, T.; Shinde, S.; Theorin, A.; Thomsen, U. An industrial control loop decoupler for process control applications. Control. Eng. Pract. 2022, 123, 105138. [Google Scholar] [CrossRef]
- Heertjes, M.; van Engelen, A. Minimizing cross-talk in high-precision motion systems using data-based dynamic decoupling. Control Eng. Pract. 2011, 12, 1423–1432. [Google Scholar] [CrossRef]
- Shen, Y.; Cai, W.-J.; Li, S. Normalized decoupling control for high-dimensional MIMO processes for application in room temperature control HVAC systems. Control Eng. Pract. 2010, 6, 652–664. [Google Scholar] [CrossRef]
- Luan, X.; Chen, Q.; Liu, F. Equivalent Transfer Function based Multi-loop PI Control for High Dimensional Multivariable Systems. Int. J. Control Autom. Syst. 2015, 2, 346–352. [Google Scholar] [CrossRef]
- Wu, G.; Sun, H.; Zhang, X.; Egea-Alvarez, A.; Zhao, B.; Xu, S.; Wang, S.; Zhou, X. Parameter Design Oriented Analysis of the Current Control Stability of the Weak-Grid-Tied VSC. IEEE Trans. Power Deliv. 2021, 3, 1458–1470. [Google Scholar] [CrossRef]
- Luan, X.; Chen, Q.; Liu, F. Centralized PI control for high dimensional multivariable systems based on equivalent transfer function. ISA Trans. 2014, 5, 1554–1561. [Google Scholar] [CrossRef] [PubMed]
- Rahideh, A.; Bajodah, A.H.; Shaheed, M.H. Real time adaptive nonlinear model inversion control of a twin rotor MIMO system using neural networks. Eng. Appl. Artif. Intell. 2012, 6, 1289–1297. [Google Scholar] [CrossRef]
- van Dael, M.; Witvoet, G.; Swinkels, B.; Oomen, T. Systematic feedback control design for scattered light noise mitigation in Virgo’s MultiSAS. In Proceedings of the 2022 IEEE 17th International Conference on Advanced Motion Control (AMC), Padova, Italy, 18–20 February 2022; pp. 300–305. [Google Scholar]
- Wang, X.; Yang, B.; Zhu, Y. Optimization of current distribution coefficients to decouple the 6-DOF fine stage of lithographic equipment. Optik 2016, 20, 9896–9904. [Google Scholar] [CrossRef]
- Campestrini, L.; Eckhard, D.; Gevers, M.; Bazanella, A.S. Virtual Reference Feedback Tuning for non-minimum phase plants. Automatica 2011, 8, 1778–1784. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Zhang, H.; Xie, X. Adaptive Fuzzy Output-Constrained Control for Nonlinear Stochastic Systems with Input Delay and Unknown Control Coefficients. IEEE Trans. Cybern. 2021, 11, 5279–5290. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Points | Values (m) |
|---|---|
| Parameters | Values |
|---|---|
| Parameters | |||
|---|---|---|---|
| Parameters | Estimate | Parameters | Estimate | Parameters | Estimate |
|---|---|---|---|---|---|
| −30,359 | |||||
| −41,652 | |||||
| −21,208 |
| Excitated | |||
|---|---|---|---|
| DoF | |||
| z | None 1 | ||
| None | |||
| None | |||
| None | |||
| None | |||
| None | |||
| None | |||
| None | |||
| None |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Liu, Y.; Song, F.; Tan, J. Dynamic Decoupling Method Based on Motor Dynamic Compensation with Application for Precision Mechatronic Systems. Energies 2024, 17, 2038. https://doi.org/10.3390/en17092038
Liu K, Liu Y, Song F, Tan J. Dynamic Decoupling Method Based on Motor Dynamic Compensation with Application for Precision Mechatronic Systems. Energies. 2024; 17(9):2038. https://doi.org/10.3390/en17092038
Chicago/Turabian StyleLiu, Kaixin, Yang Liu, Fazhi Song, and Jiubin Tan. 2024. "Dynamic Decoupling Method Based on Motor Dynamic Compensation with Application for Precision Mechatronic Systems" Energies 17, no. 9: 2038. https://doi.org/10.3390/en17092038
APA StyleLiu, K., Liu, Y., Song, F., & Tan, J. (2024). Dynamic Decoupling Method Based on Motor Dynamic Compensation with Application for Precision Mechatronic Systems. Energies, 17(9), 2038. https://doi.org/10.3390/en17092038