



Grey-Box Modelling of District Heating Networks Using Modified LPV Models

 ,
,  and
and
Abstract
1. Introduction
1.1. Background of the Study
1.2. Literature Review on Grey-Box Models
1.3. Research Contributions and Novelty
1.4. Research Objectives and Scope
2. System Description and Modelling
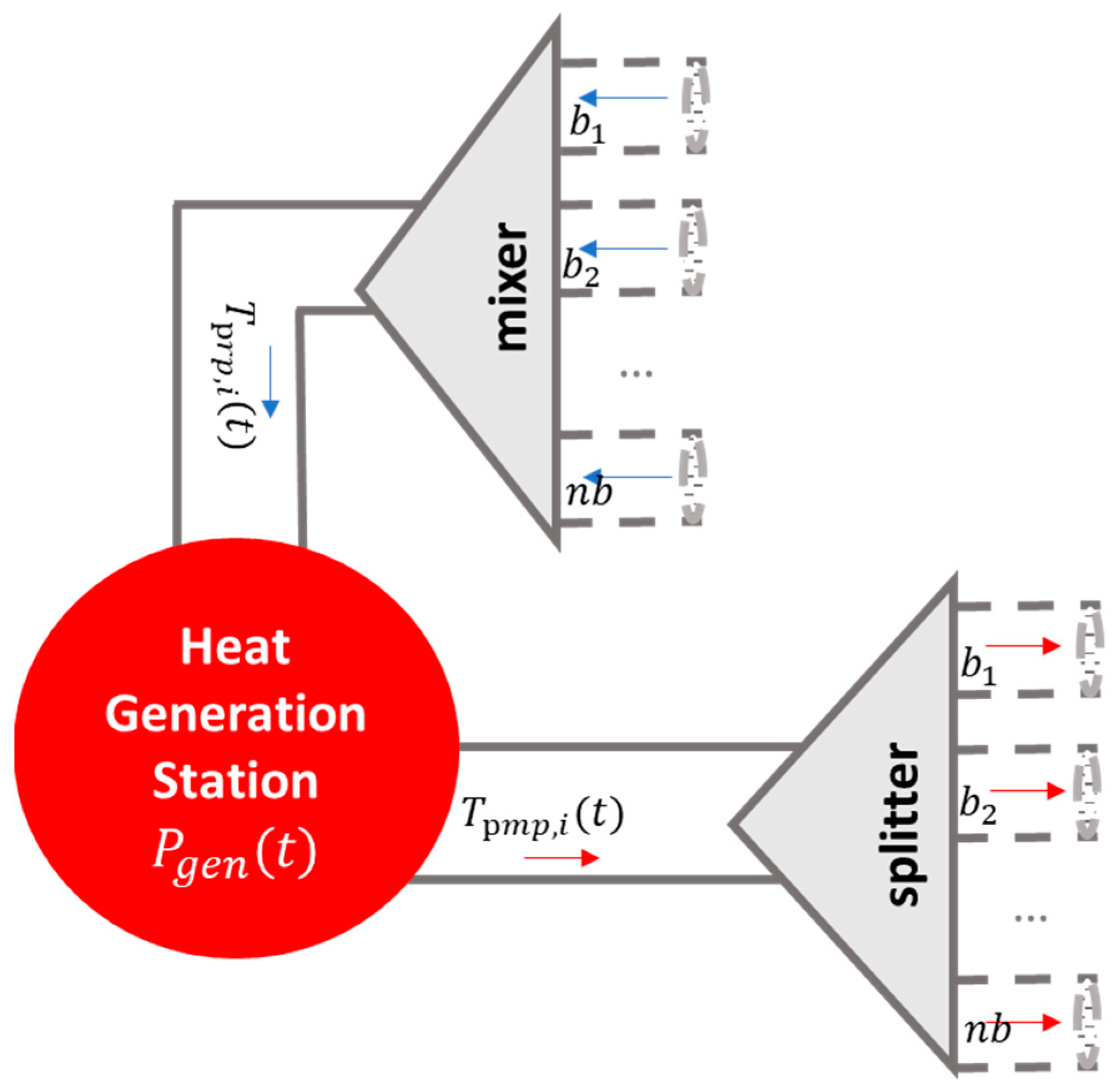
2.1. Physical Modelling of the Generation Section
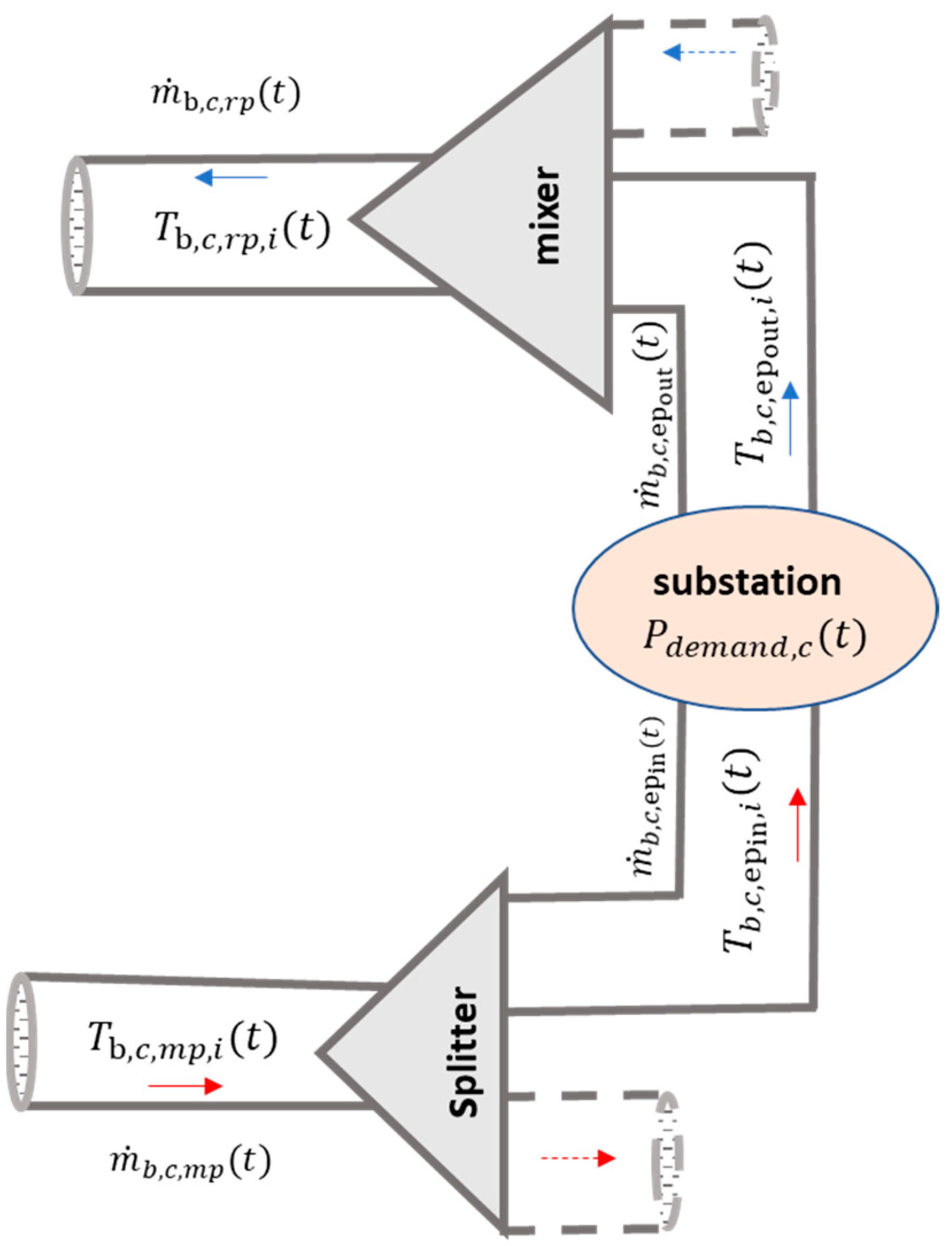
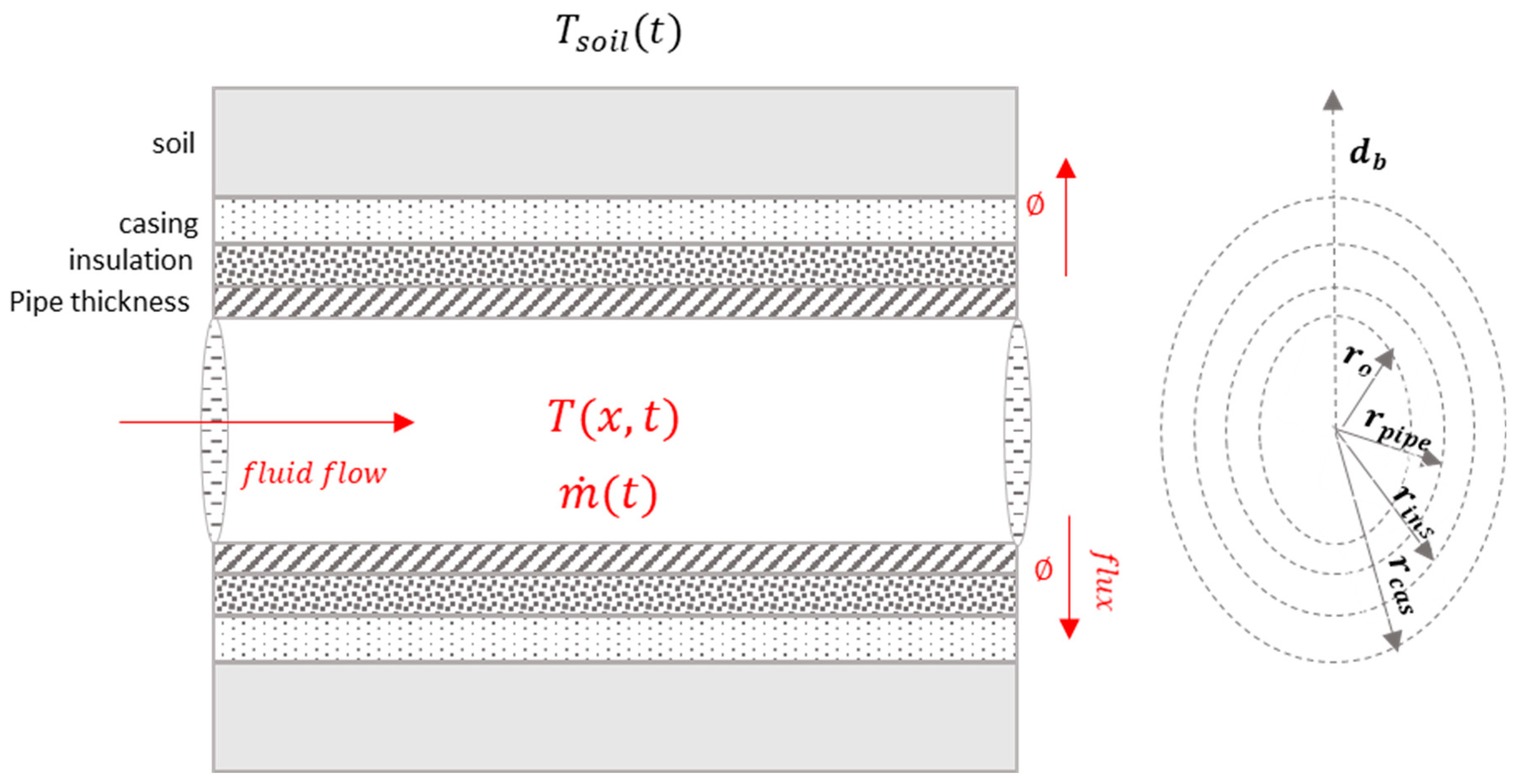
2.2. Physical Modelling of the Distribution Section
- ⮚
- Heat transfer occurs solely in the radial direction.
- ⮚
- Conduction heat transfer is considered through the pipe, insulation, casing, and soil.
- ⮚
- Material properties are constant and independent of temperature.
- ⮚
- Thermal interactions between the supply and return pipes are not accounted for.
- ⮚
- The thermal inertia of the pipes, casing, and insulation is neglected.
- ⮚
- Bent pipes are treated as straight pipes of the same length.
2.3. Grey-Box Modelling of the Generation and Distribution Section
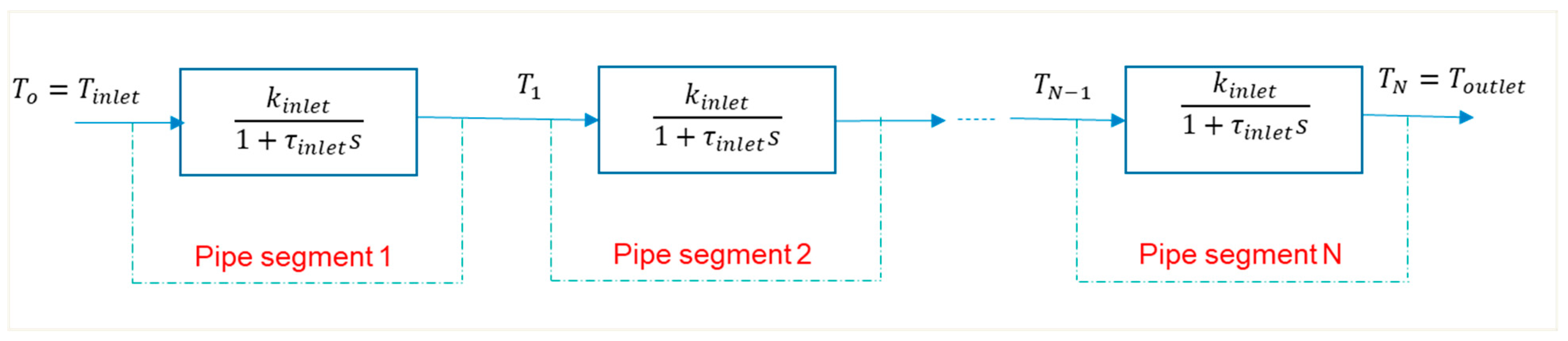
2.3.1. LPV Modelling of a Pipe
2.3.2. Steps for Formulating LPV Models
- Step 1: Scheduling parameter or variable identification
- Step 2: Linear model development
- Step 3: Generating data and identifying the relationship between model parameters and the scheduling variables
- Step 4: Finalise the LPV model
- Step 1: Scheduling variable identification
- Step 2: Linear Model Development
- Step 3: Generating the dataset and identifying the relationship between model parameters and scheduling variables
- Parameters that vary with the scheduling variables (mass flow rate), which include , , , , , , and .
- Parameters that remain constant with the scheduling variable, which are and .
- Step 4: LPV Model Finalisation
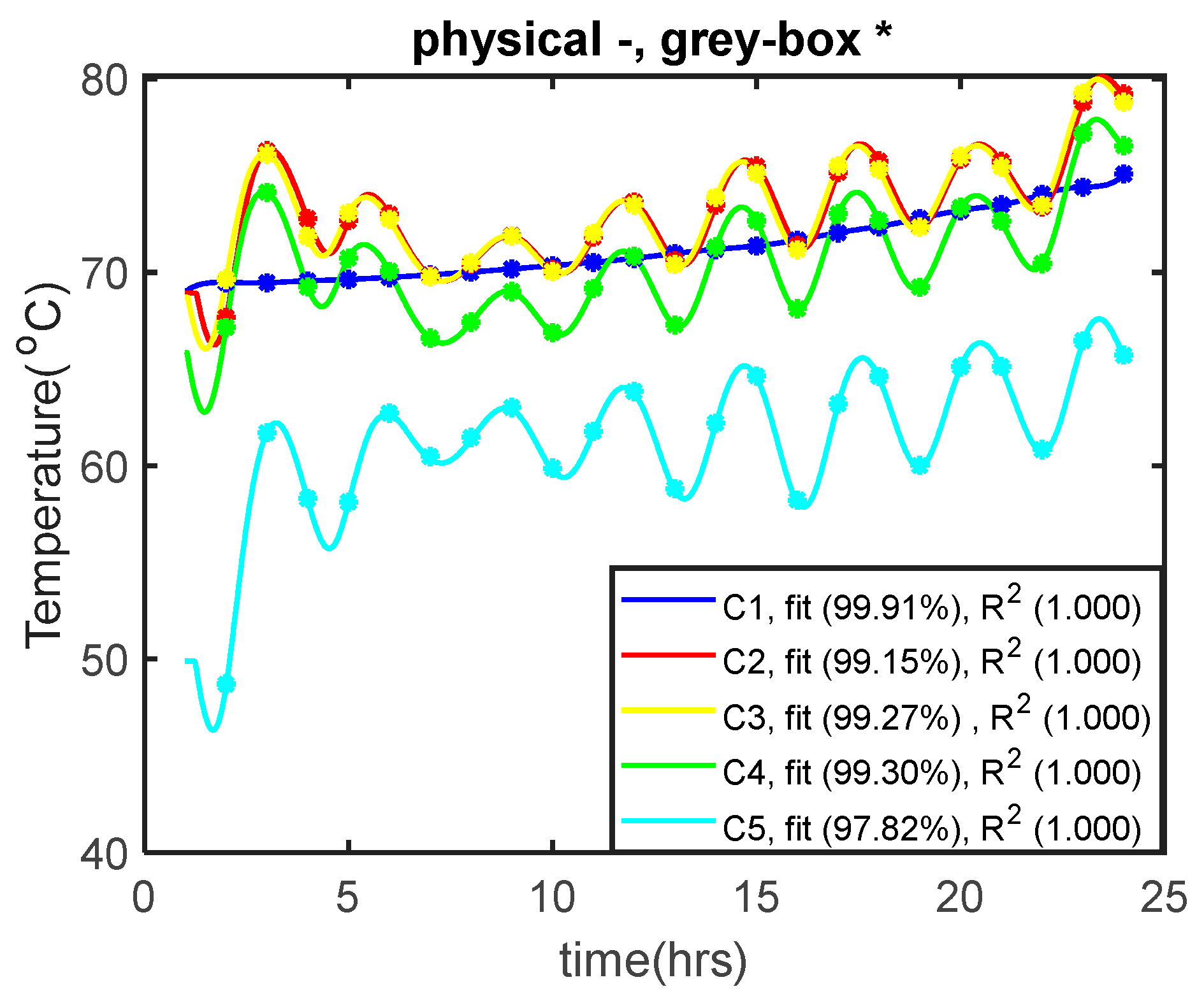
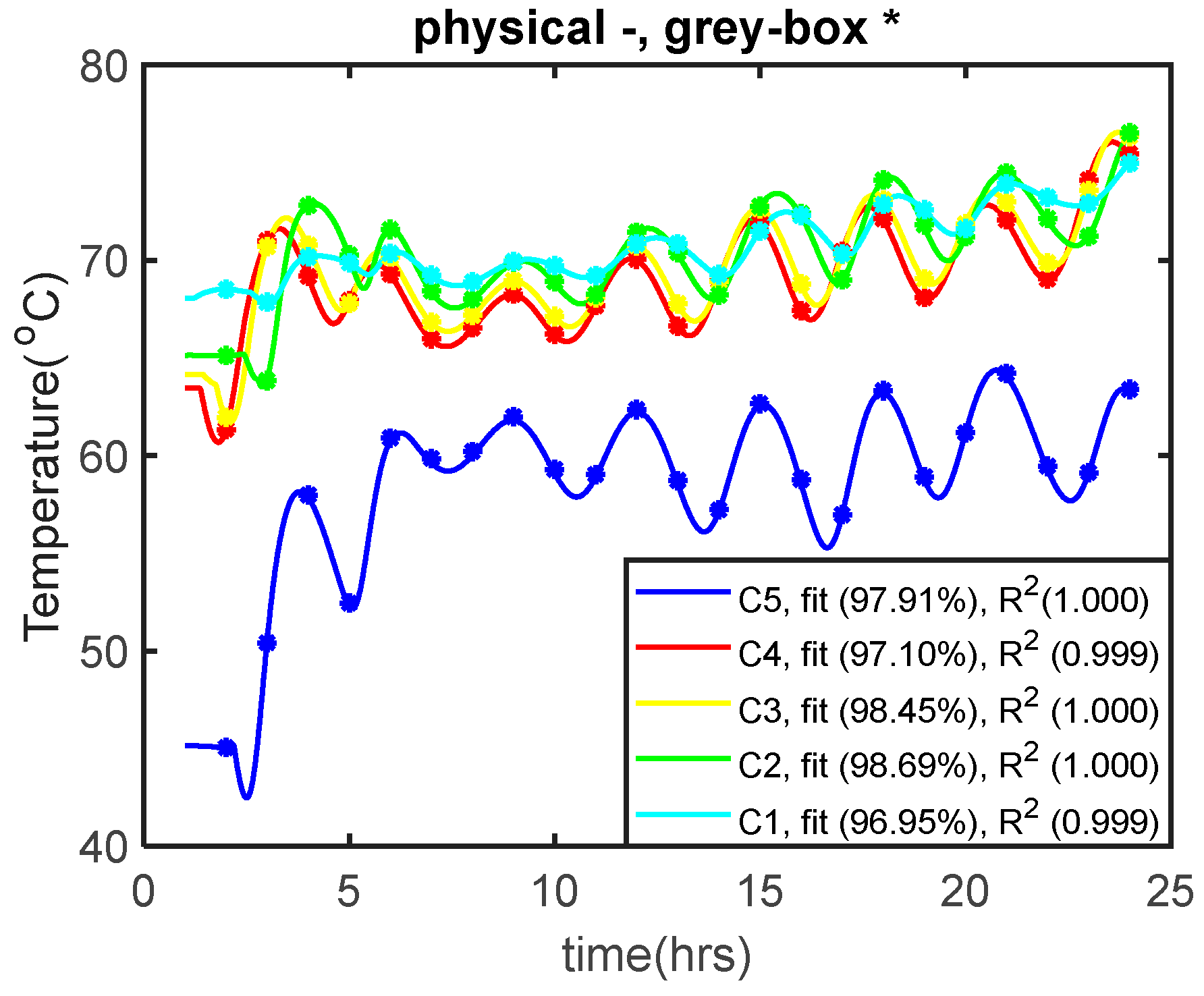
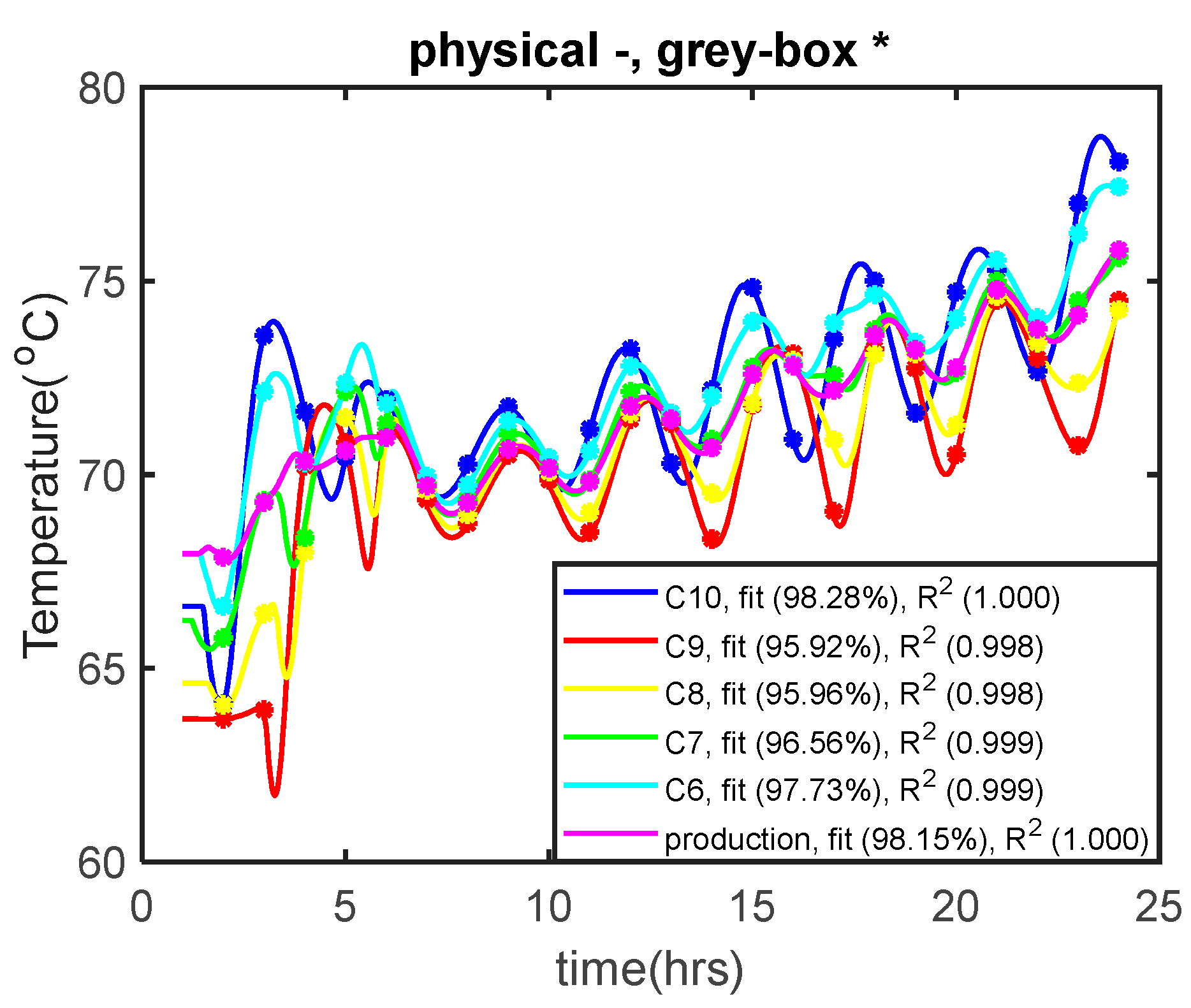
3. Model Validation Using DHN Simulation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| DHN | District heating network |
| DRTO | Dynamic real-time optimisation |
| IEA | International Energy Agency |
| LPV | Linear parameter varying |
| LFPM | Low-fidelity physical model |
| MISO | Multiple Input Single Output |
| MPC | Model predictive control |
| NMPC | Nonlinear model predictive control |
| RPM | Reinitialised partial moment |
| SISO | Single Input Single Output |
| SDE | Stochastic differentiation equation |
| TEG | Thermal energy generation |
| Indices | |
| Production main pipe | |
| Production return pipe | |
| Main pipe | |
| Extended-in pipe | |
| Extended-out pipe | |
| Return pipe | |
| Network branch | |
| Number of branches in the network | |
| Number of consumers in branch | |
| Total number of consumers in the network | |
| Total number of pipes in the DHN | |
| , | |
| A consumer component (distribution pipes, splitter, mixer, and substation) | |
| Number of discretised segments of distribution pipe k in consumer component c in branch b | |
| Number of discretised segments of production pipe | |
| , where for distribution pipes and for production pipes | |
| , -total number of time instances | |
| pipe, casing, and insulation | |
| Symbols | |
| Discretised temperatures of distribution pipe in consumer component in branch b () | |
| Discretised temperatures of production pipe () | |
| Soil temperature () | |
| Temperature of the fluid at the pipe inlet (pipe inlet temperature) () | |
| Temperature of the fluid at the pipe outlet (pipe outlet temperature) () | |
| Power demand of the substation in consumer component c () | |
| Mass flow rates in distribution pipe ) | |
| Mass flow rate in production pipe ) | |
| Power generated in the combined generation station () | |
| Total number of variables in a presumed existing DHN model | |
| Total number of equations formulated from a presumed existing DHN model | |
| ) | |
| ) | |
| ) | |
| Reynolds number | |
| Prandtl number | |
| ) | |
| Depth of buried pipes in the ground () | |
| Thickness of a pipe and its protective materials () | |
| Pipe length () | |
| () | |
| Pipe internal diameter () | |
| External diameter of a pipe and its protective materials () | |
| S | Conduction shape factor () |
| ) | |
| ) | |
| ) | |
| Output of a general SISO system | |
| Input of a general SISO system | |
| Number of zeros of a general SISO system | |
| Number of poles of a general SISO system | |
| Real values of at sampling | |
| Predicted values of at sampling | |
| and | |
| and | |
| () | |
| () | |
| outlet temperature using the high-fidelity physical model () | |
| using grey-box or low-fidelity physical models to the high-fidelity physical model | |
| outlet temperature from the grey-box or low-fidelity physical model against the high-fidelity physical model simulation result | |
| R-squared for comparing the outlet temperature of all the pipes in DHN using grey-box or low-fidelity physical models to the high-fidelity physical model | |
| Percentage fit of all the pipe outlet temperatures in the DHN from the grey-box or low-fidelity physical models against the high-fidelity physical model simulation result. | |
| Model parameters to be identified | |
| Initial value of the inlet temperature () | |
| Step increase on the inlet temperature () | |
| Time at which step change is imposed on the inlet temperature () | |
| Gain of the pipe outlet temperature resulting from inlet temperature variation | |
| Gain of the pipe outlet temperature resulting from soil temperature variation | |
| Time constant based on inlet temperature variation () | |
| Modified time constant based on inlet temperature variation () | |
| Time constant based on soil temperature variation () | |
| Time taken for the fluid to move through the pipe length () | |
| Time delay of a general SISO system or the time taken for the fluid to move through a given pipe segment length () | |
| Modified time taken for the fluid to move through a given pipe segment length () | |
| Number of pipe discretisation segments during physical model development | |
| Number of pipe discretisation segments during physical model development, | |
| Number of pipe discretisation segments during grey-box model development | |
| Number of pipe discretisation segments during grey-box model development, | |
| Influence of inlet temperature on the pipe outlet temperature () | |
| Influence of soil temperature on the pipe outlet temperature () | |
| Identity matrix | |
| Vector of the discretised temperature that shows the influence of the inlet temperature on the pipe outlet temperature () | |
| Initially assigned pipe segment lengths for a DHN simulation () | |
| Length of a discretised pipe segment () | |
| Discretised segment length of a pipe () | |
| Courant number |
Appendix A
Appendix A.1. Thermophysical Properties of the Heat Transfer Fluid (Water)
Appendix A.2. Thermophysical Properties of the Pipe and Its Protectives

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipe | Insulation | Casing | Soil | |
|---|---|---|---|---|
| Material | Stainless steel | Polyurethane | Polyethylene | |
| (W/(m.K)) | 15.1 | 0.025 | 0.47 | 1 |
References
- IEA Report. Heat—Renewables 2023—Analysis—IEA. Available online: https://www.iea.org/reports/renewables-2023/heat (accessed on 12 November 2024).
- Pezzini, P.; Gomis-Bellmunt, O.; Sudrià-Andreu, A. Optimization techniques to improve energy efficiency in power systems. Renew. Sustain. Energy Rev. 2011, 15, 2028–2041. [Google Scholar] [CrossRef]
- Rafati, A.; Shaker, H.R. Predictive maintenance of district heating networks: A comprehensive review of methods and challenges. Therm. Sci. Eng. Prog. 2024, 53, 102722. [Google Scholar] [CrossRef]
- Jiang, M.; Rindt, C.; Smeulders, D.M.J. Optimal Planning of Future District Heating Systems—A Review. Energies 2022, 15, 7160. [Google Scholar] [CrossRef]
- Untrau, A.; Sochard, S.; Marias, F.; Reneaume, J.-M.; Le Roux, G.A.; Serra, S. Analysis and future perspectives for the application of Dynamic Real-Time Optimization to solar thermal plants: A review. Sol. Energy 2022, 241, 275–291. [Google Scholar] [CrossRef]
- Ellis, M.; Durand, H.; Christofides, P.D. A tutorial review of economic model predictive control methods. J. Process. Control. 2014, 24, 1156–1178. [Google Scholar] [CrossRef]
- Hotvedt, M.; Hauger, S.O.; Gjertsen, F.; Imsland, L. Dynamic real-time optimisation of a CO2 capture facility. IFAC-PapersOnLine 2019, 52, 856–861. [Google Scholar] [CrossRef]
- Untrau, A.; Sochard, S.; Marias, F.; Reneaume, J.-M.; Le Roux, G.A.; Serra, S. Dynamic Real-Time Optimization of a solar thermal plant during daytime. Comput. Chem. Eng. 2023, 172, 108184. [Google Scholar] [CrossRef]
- Serasinghe, R.; Long, N.; Clark, J.D. Parameter identification methods for low-order gray box building energy models: A critical review. Energy Build. 2024, 311, 114123. [Google Scholar] [CrossRef]
- Agner, F.; Kergus, P.; Pates, R.; Rantzer, A. Hydraulic Parameter Estimation in District Heating Networks. IFAC-PapersOnLine 2023, 56, 5438–5443. [Google Scholar] [CrossRef]
- Wang, J.; Kong, F.; Pan, B.; Zheng, J.; Xue, P.; Sun, C.; Qi, C. Low-order gray-box modeling of heating buildings and the progressive dimension reduction identification of uncertain model parameters. Energy 2024, 294, 130812. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, M.; Chen, Z.; Chen, Z.; Ji, Y. Physical energy and data-driven models in building energy prediction: A review. Energy Rep. 2022, 8, 2656–2671. [Google Scholar] [CrossRef]
- Bacher, P.; Madsen, H.; Perers, B. Models of the Heat Dynamics of Solar Collectors for Performance Testing. In Proceedings of the ISES Solar World Congress 2011, Kassel, Germany, 28 August–2 September 2011; Available online: www.imm.dtu.dk (accessed on 12 November 2024).
- Nova-Rincon, A.; Sochard, S.; Serra, S.; Reneaume, J.-M. Dynamic simulation and optimal operation of district cooling networks via 2D orthogonal collocation. Energy Convers. Manag. 2020, 207, 112505. [Google Scholar] [CrossRef]
- Li, Y.; O’Neill, Z.; Zhang, L.; Chen, J.; Im, P.; DeGraw, J. Grey-box modeling and application for building energy simulations—A critical review. Renew. Sustain. Energy Rev. 2021, 146, 111174. [Google Scholar] [CrossRef]
- Thilker, C.A.; Bacher, P.; Bergsteinsson, H.G.; Junker, R.G.; Cali, D.; Madsen, H. Non-linear grey-box modelling for heat dynamics of buildings. Energy Build. 2021, 252, 111457. [Google Scholar] [CrossRef]
- Svensen, J.L.; Bergsteinsson, H.G.; Madsen, H. Modeling and nonlinear predictive control of solar thermal systems in district heating. Heliyon 2024, 10, e31027. [Google Scholar] [CrossRef]
- Blomgren, E.; D’ettorre, F.; Samuelsson, O.; Banaei, M.; Ebrahimy, R.; Rasmussen, M.; Nielsen, N.; Larsen, A.; Madsen, H. Grey-box modeling for hot-spot temperature prediction of oil-immersed transformers in power distribution networks. Sustain. Energy Grids Networks 2023, 34, 101048. [Google Scholar] [CrossRef]
- Mercere, G.; Palsson, H.; Poinot, T. Continuous-time linear parameter-varying identification of a cross flow heat exchanger: A local approach. IEEE Trans. Control. Syst. Technol. 2011, 19, 64–76. [Google Scholar] [CrossRef]
- Chouaba, S.E.; Chamroo, A.; Ouvrard, R.; Poinot, T. A counter flow water to oil heat exchanger: MISO quasi linear parameter varying modeling and identification. Simul. Model. Pract. Theory 2012, 23, 87–98. [Google Scholar] [CrossRef]
- Naspolini, A.; Morato, M.M.; Flesch, R.C.C.; Normey-Rico, J.E. Enhanced gas-lift system operation using LPV nonlinear model predictive control. Geoenergy Sci. Eng. 2024, 239, 212969. [Google Scholar] [CrossRef]
- Boutourda, F.; Ouvrard, R.; Poinot, T.; Mehdi, D.; Mesquine, F.; De Tredern, E.; Jauzein, V. A global approach to estimate continuous-time LPV models for wastewater nitrification. IFAC-PapersOnLine 2024, 58, 61–66. [Google Scholar] [CrossRef]
- Shayan, M.E.; Petrollese, M.; Rouhani, S.H.; Mobayen, S.; Zhilenkov, A.; Su, C.L. An innovative two-stage machine learning-based adaptive robust unit commitment strategy for addressing uncertainty in renewable energy systems. Int. J. Electr. Power Energy Syst. 2024, 160, 110087. [Google Scholar] [CrossRef]
- The Engineering ToolBox. Water—Specific Heat vs. Temperature. Available online: https://www.engineeringtoolbox.com/specific-heat-capacity-water-d_660.html (accessed on 13 January 2025).
- Duquette, J.; Rowe, A.; Wild, P. Thermal performance of a steady state physical pipe model for simulating district heating grids with variable flow. Appl. Energy 2016, 178, 383–393. [Google Scholar] [CrossRef]
- Elhafaia, M.H.; Nova-Rincon, A.; Sochard, S.; Serra, S.; Reneaume, J.-M. Optimization of the pipe diameters and the dynamic operation of a district heating network using a robust initialization strategy. Appl. Therm. Eng. 2025, 258, 124533. [Google Scholar] [CrossRef]
- Tijani, O.E.; Serra, S.; Sochard, S.; Viot, H.; Henon, A.; Malti, R.; Lanusse, P.; Reneaume, J.M. Transient Modelling and Simulation for Optimal Future Management of a District Heating Network. 31ème Congrès Français Therm 2023. [Google Scholar] [CrossRef]
- ThermExcel. Physical Characteristics of Water. 2003. Available online: https://www.thermexcel.com/english/tables/eau_atm.htm (accessed on 14 November 2024).
- The Engineering ToolBox. Water—Thermal Conductivity vs. Temperature. Available online: https://www.engineeringtoolbox.com/water-liquid-gas-thermal-conductivity-temperature-pressure-d_2012.html (accessed on 14 November 2024).
- Bergman, T.L.; Lavine, A.S.; Incropera, F.P.; Dewitt, D.P. Fundamentals of Heat and Mass Transfer, 7th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]









| Variables | No. of Variables | Equations | No. of Equations |
|---|---|---|---|
| Discretised pipe equations | |||
| 1 | |||
| Substation | |||
| Distribution splitters | |||
| Splitter continuity | |||
| Distribution mixers | |||
| Mixer continuity | |||
| 2 | Production splitter | ||
| Production mixer | 2 | ||
| 1 | Power production in the generation section | 1 | |
| Consumer | (in) | (m) | (in) | (m) |
|---|---|---|---|---|
| C1 | 8.00 | 279.93 | 5.00 | 95.21 |
| C2 | 6.00 | 720.07 | 4.00 | 150.00 |
| C3 | 5.00 | 176.46 | 2.00 | 40.00 |
| C4 | 5.00 | 124.69 | 3.50 | 30.00 |
| C5 | 1.50 | 397.32 | 1.50 | 100.00 |
| C6 | 10.00 | 190.01 | 5.00 | 25.00 |
| C7 | 8.00 | 97.04 | 3.50 | 10.00 |
| C8 | 6.00 | 268.79 | 3.00 | 90.20 |
| C9 | 5.00 | 1280.60 | 3.00 | 200.00 |
| C10 | 5.00 | 198.28 | 4.00 | 50.00 |
| Production | 12.00 | 200.00 |
| (m) | 1 | 2 | 5 | 8 | 10 | 15 |
| Computation time (s) | 24.03 60 | 3.72 60 | 29.92 | 8.36 | 4.31 | 2.26 |
| Minimum (%) | 99.97 | 99.91 | 99.83 | 99.7 | 99.66 | 99.50 |
| Minimum | 1.0000 | 1.0000 | 1.000 | 1.000 | 1.000 | 1.000 |
| Average (%) | 99.99 | 99.98 | 99.95 | 99.92 | 99.90 | 99.86 |
| Average | 1.0000 | 1.0000 | 1.000 | 1.000 | 1.000 | 1.000 |
| Maximum integration time step (s) | 10 | 10 | 10 | 10 | 10 | 10 |
| Maximum | 15.25 | 7.71 | 3.05 | 2.46 | 2.46 | 2.46 |
| (m) | 20 | 50 | 100 | 150 | 200 | 500 |
| Computation time (s) | 1.82 | 0.99 | 0.83 | 0.81 | 0.79 | 0.78 |
| Minimum (%) | 99.34 | 98.08 | 95.34 | 92.32 | 88.79 | 82.38 |
| Minimum | 1.000 | 1.000 | 0.998 | 0.994 | 0.987 | 0.967 |
| Average (%) | 99.82 | 99.56 | 99.10 | 98.75 | 98.39 | 97.71 |
| Average | 1.000 | 1.000 | 1.000 | 0.999 | 0.999 | 0.998 |
| Maximum integration time step (s) | 10 | 10 | 10 | 10 | 10 | 10 |
| Maximum | 2.46 | 2.46 | 2.46 | 2.46 | 2.46 | 2.46 |
| (m) | 8 | 10 | 15 | 20 | 50 | 100 | 150 | 200 | 500 |
| Computation time (s) | 43.13 | 26.73 | 11.23 | 9.38 | 6.37 | 2.89 | 2.71 | 2.67 | 2.34 |
| Minimum (%) | 95.23 | 94.98 | 95.00 | 95.18 | 92.13 | 85.97 | 85.59 | 79.48 | 40.23 |
| Minimum | 0.998 | 0.998 | 0.998 | 0.998 | 0.994 | 0.980 | 0.979 | 0.958 | 0.643 |
| Average (%) | 98.54 | 98.54 | 98.43 | 98.43 | 97.56 | 95.79 | 95.04 | 92.32 | 75.87 |
| Average | 1.000 | 1.000 | 1.000 | 1.000 | 0.999 | 0.997 | 0.996 | 0.991 | 0.913 |
| Maximum integration time step | 58.18 | 66.93 | 90.76 | 142.78 | 343.38 | 523.66 | 731.72 | 907.81 | 1004.31 |
| Maximum | 6.04 | 8.15 | 6.17 | 7.09 | 12.53 | 32.28 | 59.18 | 51.94 | 77.43 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tijani, O.E.; Serra, S.; Lanusse, P.; Malti, R.; Viot, H.; Reneaume, J.-M. Grey-Box Modelling of District Heating Networks Using Modified LPV Models. Energies 2025, 18, 1626. https://doi.org/10.3390/en18071626
Tijani OE, Serra S, Lanusse P, Malti R, Viot H, Reneaume J-M. Grey-Box Modelling of District Heating Networks Using Modified LPV Models. Energies. 2025; 18(7):1626. https://doi.org/10.3390/en18071626
Chicago/Turabian StyleTijani, Olamilekan E., Sylvain Serra, Patrick Lanusse, Rachid Malti, Hugo Viot, and Jean-Michel Reneaume. 2025. "Grey-Box Modelling of District Heating Networks Using Modified LPV Models" Energies 18, no. 7: 1626. https://doi.org/10.3390/en18071626
APA StyleTijani, O. E., Serra, S., Lanusse, P., Malti, R., Viot, H., & Reneaume, J.-M. (2025). Grey-Box Modelling of District Heating Networks Using Modified LPV Models. Energies, 18(7), 1626. https://doi.org/10.3390/en18071626