
Convex Optimization and PV Inverter Control Strategy-Based Research on Active Distribution Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- 1.
- Given the single control strategy of PV inverters that restricts reactive power regulation and flexibility, a comprehensive control strategy integrating multiple strategies is proposed. This aims to fully exploit the regulation capacity and account for users’ interests.
- 2.
- Considering the complex and non-simplified OLTC models under the SOCP power-flow model, an OLTC model linearization approach using integers binary expansion and the big M method is proposed. Additionally, a linear model for OLTC tap change frequency constraints is put forward.
- 3.
- Since current “key” nodes selection indicators in distribution networks mainly focus on reactive power effect while overlooking the active power effect, a comprehensive index encompassing active–reactive voltage sensitivity and reactive power-balance degree is proposed.
- 4.
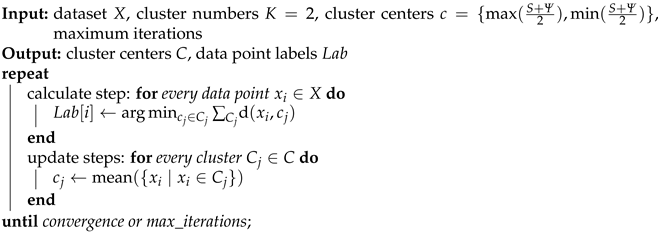
- Due to the random selection of initial clustering centers in the traditional K-means algorithm, an improved K-means clustering algorithm with an enhanced selection method for initial clustering centers is proposed.
2. Key Nodes Selection
2.1. Active–Reactive Voltage Sensitivity
2.2. Reactive Power-Balance Degree
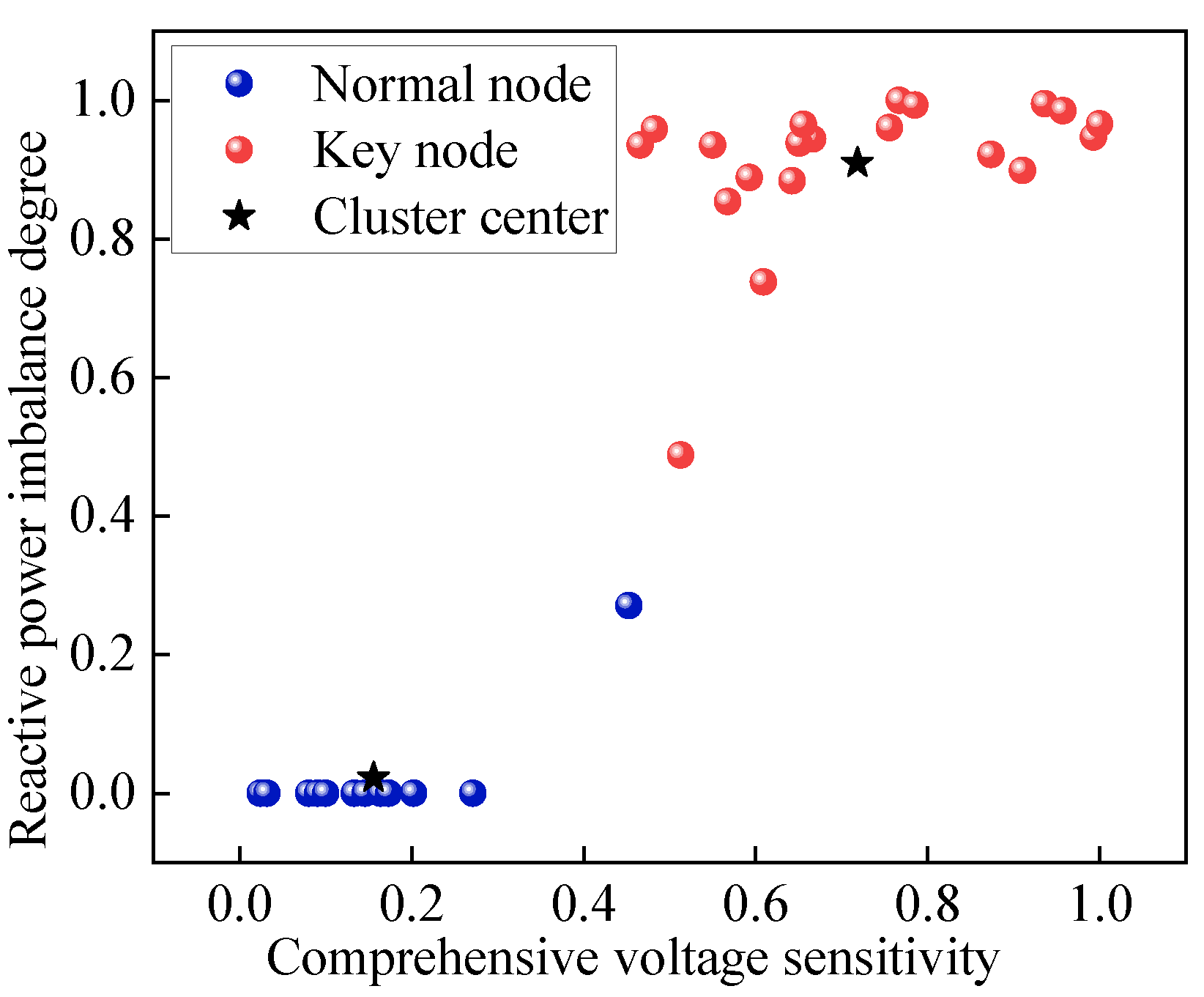
2.3. Node Classification Method Based on Improved K-Means Clustering
| Algorithm 1 Improved K-means clustering algorithm. |
 |
3. The Framework of ADN Optimization Operation Model
3.1. Upper-Layer Optimization Model
3.1.1. Upper-Layer Model Constraints
- 1.
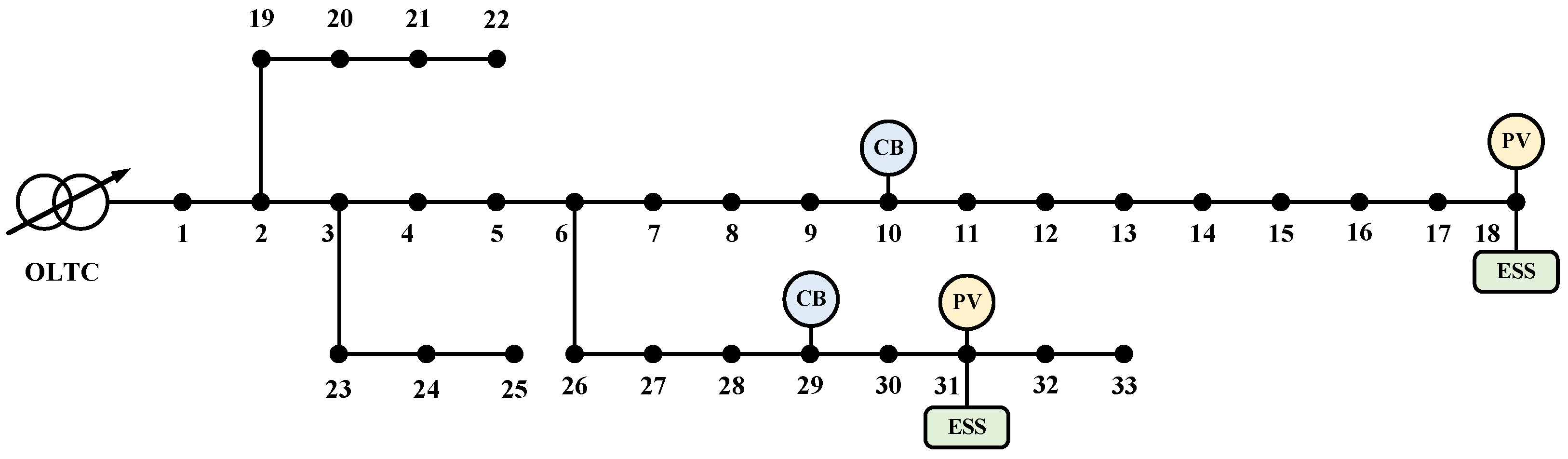
- Power-flow constraintsUsing the branch flow model shown in Figure 1, the branch flow equation shown in Equation (11) is listed according to Ohm’s law, the branch first-end power equation and the node power-balance equation.where ; and are branch ’s transmission power and current; is the injection power of node i, its value is the difference between the power emitted by the generator and the load at node i, i.e., .
- 2.
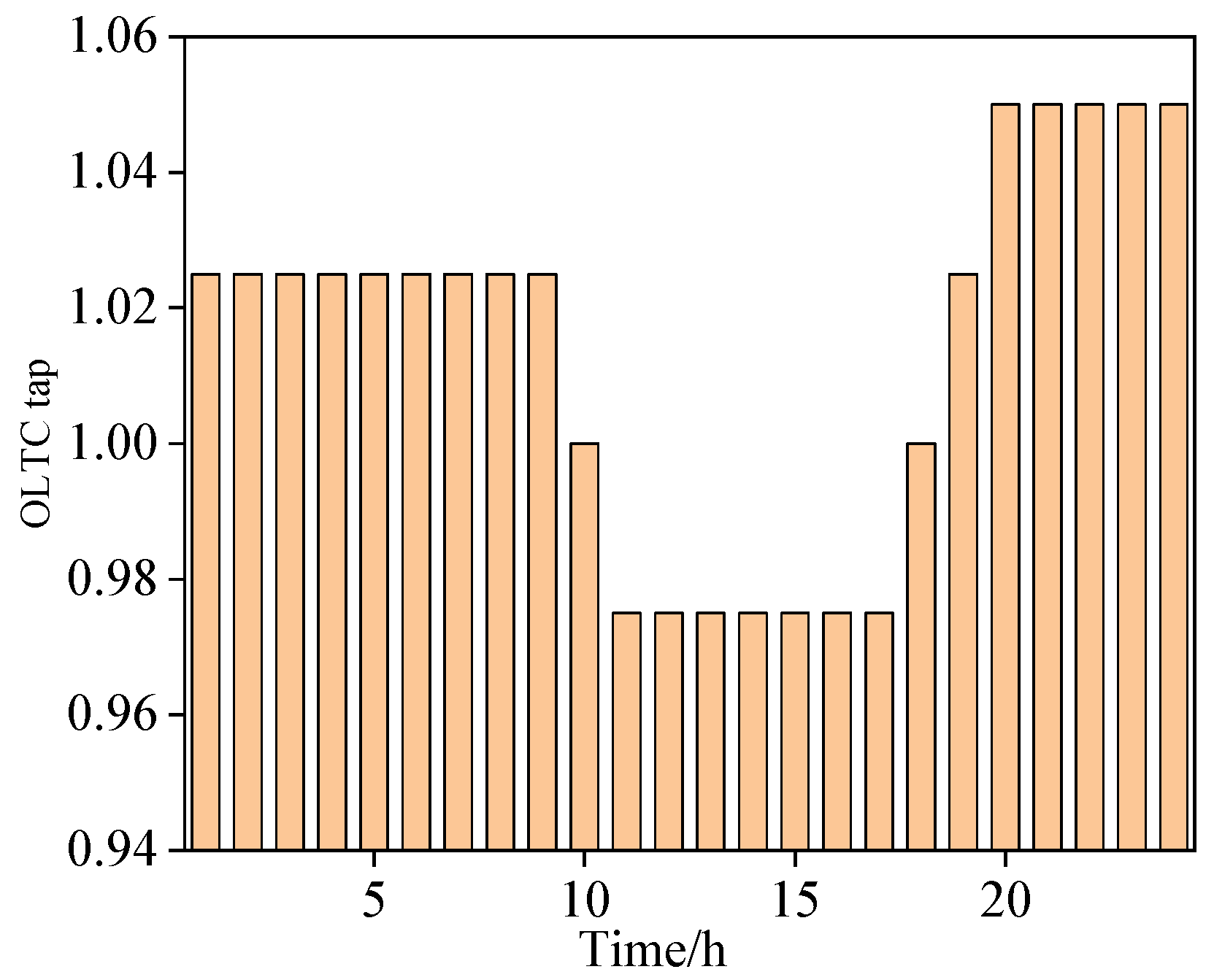
- OLTC modelThe low voltage side of the OLTC is connected to the balancing node. To simplify the solution of the optimization problem, only the low voltage side of the OLTC is considered. Let the OLTC be an ideal one and set the reference voltage . The OLTC model is shown in Equation (12).where is the OLTC tap at moment t, the integer variables; is the step size between adjacent taps, its value is 2.5%; K is the total number of taps, its value is 4.
- 3.
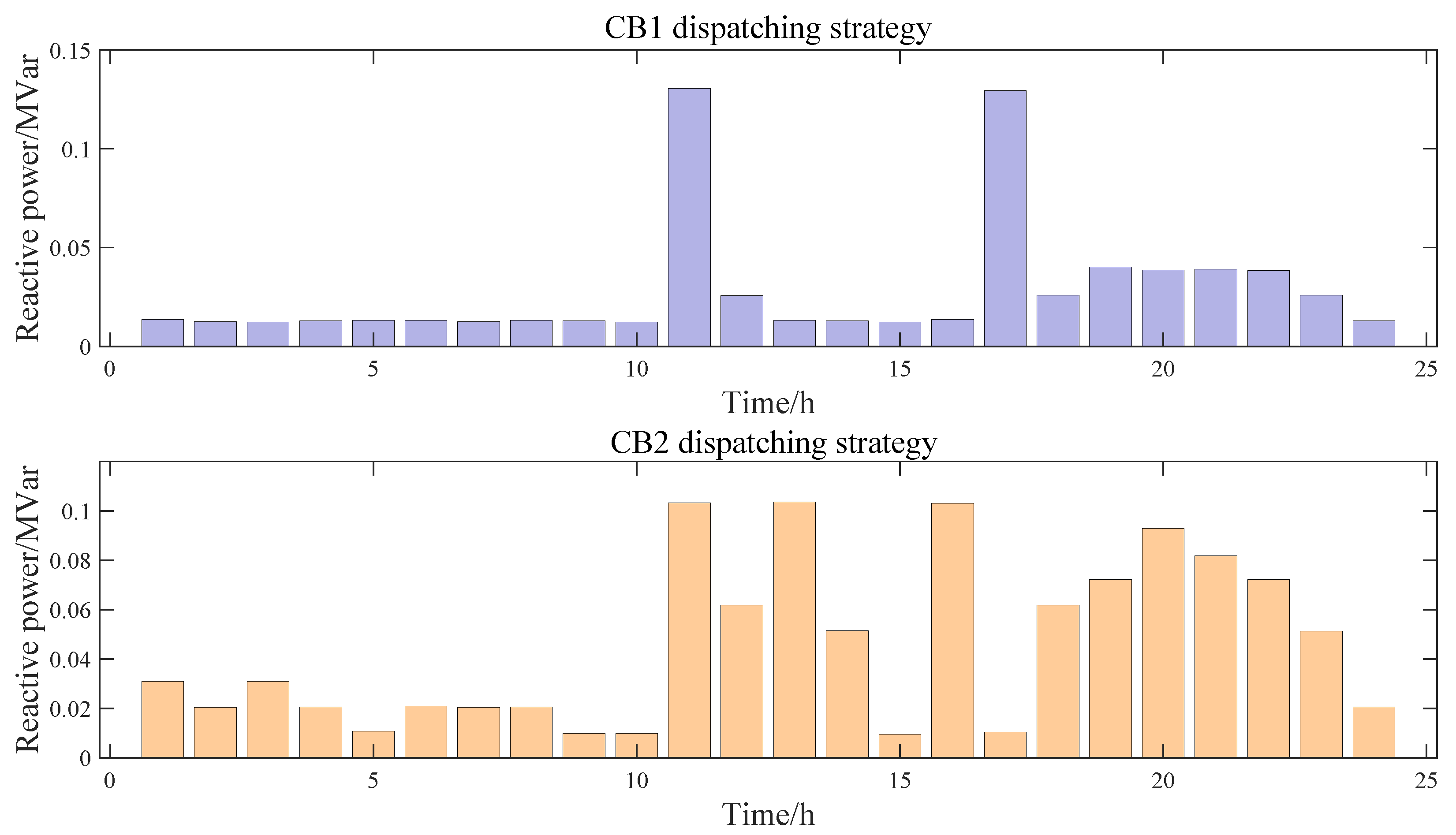
- CB modelThe CB model is shown in Equation (13).where is the reactive power compensated by the CB at node j; is the number of CB banks to be switched, the integer variables; is the capacity of each CB bank; is the total number of CB banks connected at node j; is the reactive power consumed by the load at node j.
- 4.
- Node voltage constraintwhere is the voltage of node i; and are the upper and lower limits of the node i voltage, respectively.
- 5.
- Branch current constraintwhere is the maximum current of branch .
3.1.2. Upper-Layer Model Objective Function
3.2. Lower-Layer Optimization Model
3.2.1. Lower-Layer Model Constraints
- 1.
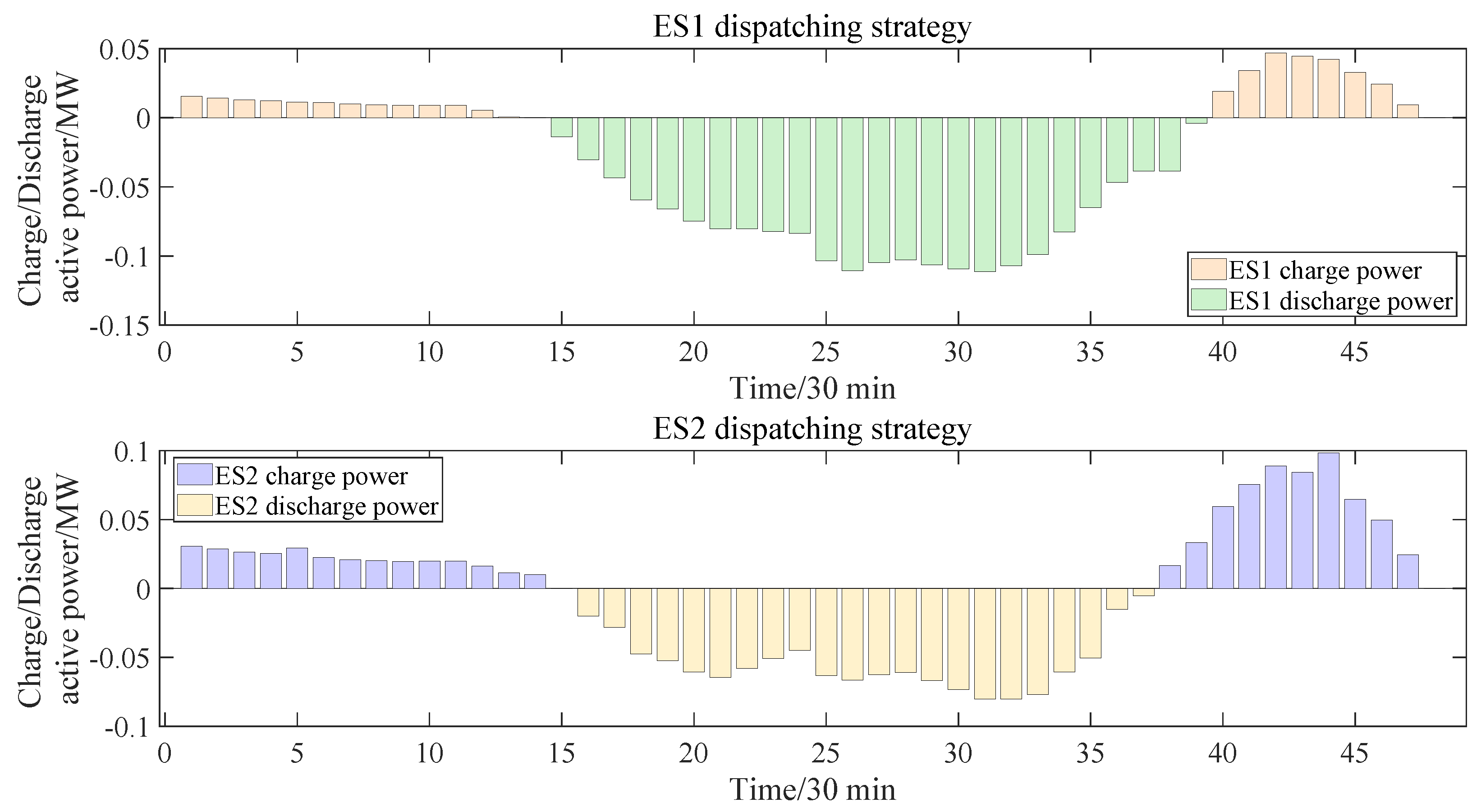
- ES modelThe ES model is shown in Equation (17).where is maximum charging and discharging power of ES; is the capacity of the ES, i.e., the maximum electricity amount that the ES device store; and are the charging and discharging efficiencies, respectively, and ; is the ES charging and discharging state at moment t, 0 denotes charging and 1 denotes discharging; is the ES state of charge (SOC) at the end of moment t,and ; .
- 2.
- PV inverter constraintsThe PV inverter constraints are detailed in the lower-layer objective function.
3.2.2. Lower-Layer Objective Function
- 1.
- Active network loss
- 2.
- Voltage deviation
- 3.
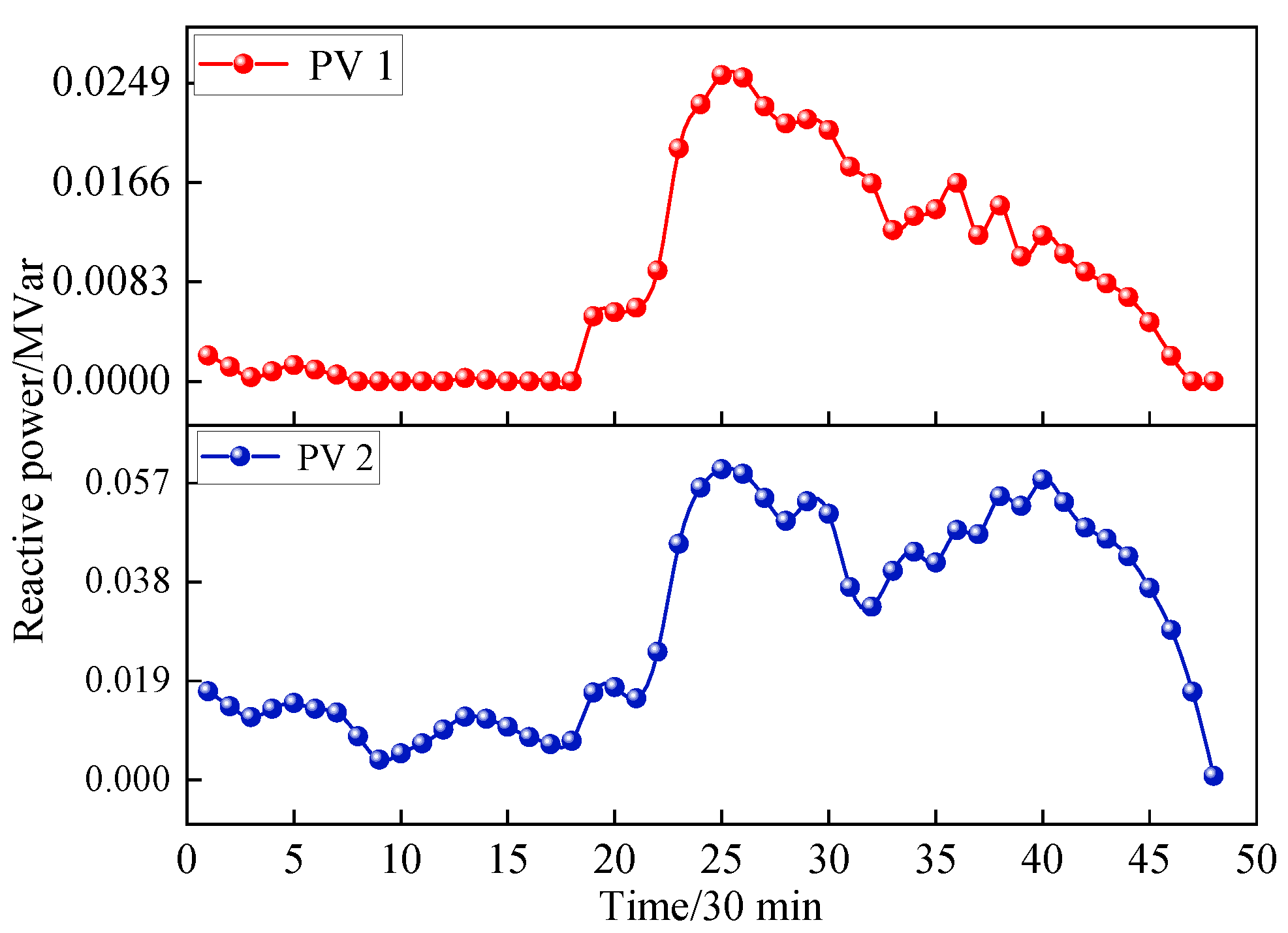
- User benefitsThe users benefits are ensured by adjusting PV inverters’ operating strategies. There are two PV inverter control strategies with reactive power regulation capability: RPC and OID. In practice, the operating strategy of PV inverters is maximum active power output control; therefore, the following three control strategies were considered: maximum active power output control, RPC, and OID. The principles are shown in Figure 2, the blue area is the executable region of the strategy.The higher the PV active power output, the more the user benefits.According to Figure 2, it can be seen that both control strategies (a) and (b) maximize the PV active power output in the current environment, while (c) sacrifices part of the active power output to obtain the reactive power regulation capability. Therefore, making the PV inverter switch along the sequence (a)→(b)→(c) can satisfy the objective of maximizing the PV active power output, i.e., the objective of maximizing the user benefit.In order to obtain the above PV inverters’ control strategy ((a)→(b)→(c)), the three traditional control strategies were combined and an integrated PV inverters’ control strategy that balances active power output maximization and reactive power regulation was derived. The integrated strategy is modeled as shown in Equations (23) and (24).where .
4. The Convexification of ADN Optimization Operation Model
4.1. The Convexification of Power-Flow Model
4.2. The Linearization of OLTC Model
4.3. The Linearization of OLTC Operation Count Constraints
4.4. The Linearization of the ES Model
- 1.
- ES power constraints
- 2.
- ES SOC constraintsThe original ESs SOC constraints are shown in Equation (37). Using the big M method can linearize it. The linearized constraints is shown in Equation (38).The Equation (39) constraints ensure that in the charging state (), only the charge SOC is valid while the discharge SOC is not; and in the discharging state (), only the discharge SOC is valid while the charge SOC is not.
5. Case Study
5.1. “Key” Nodes Selection
5.2. Case Allocation
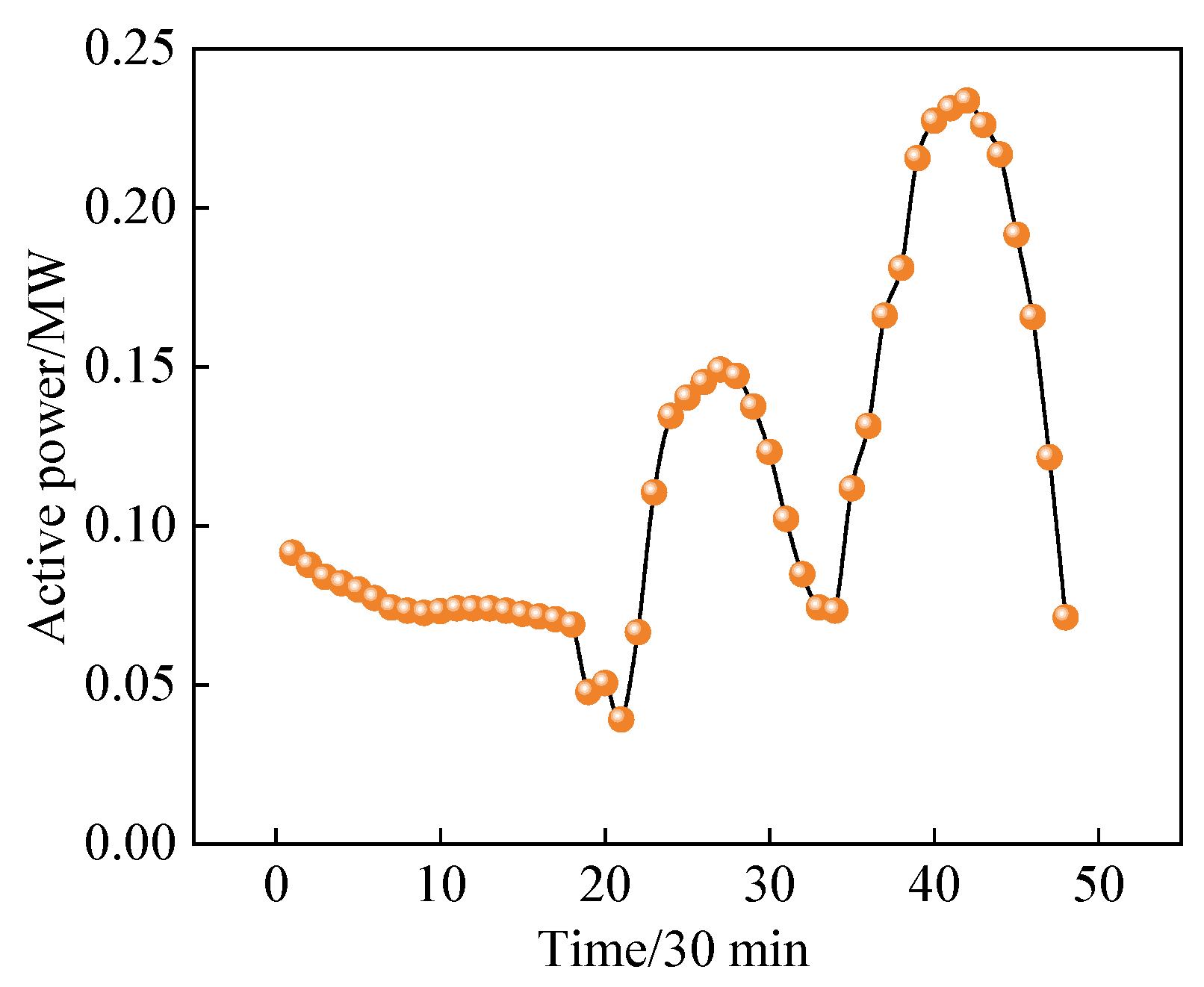
5.3. Curves for Load and PV Active-Power Output
5.4. Upper-Layer Equipment-Dispatching Strategies
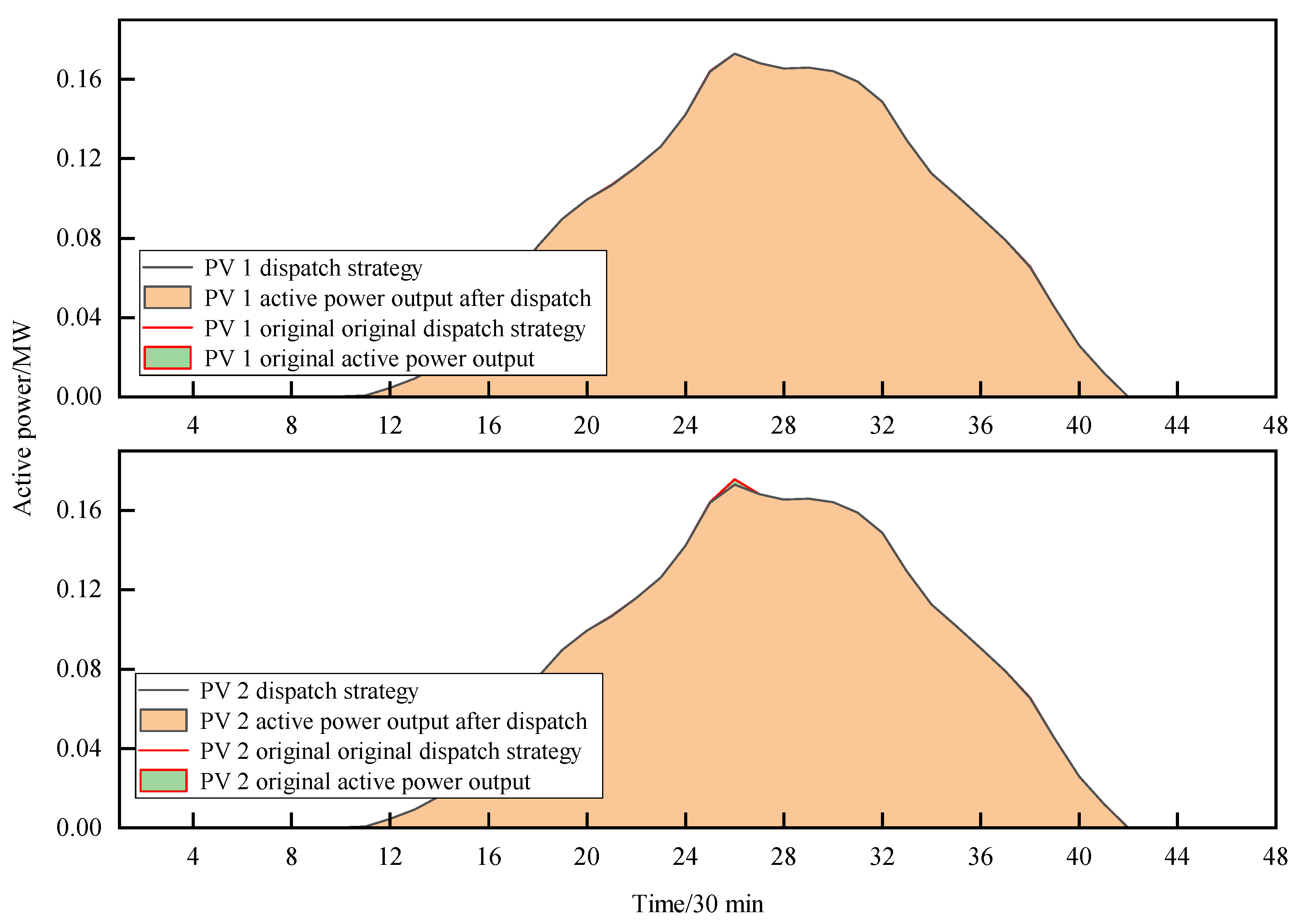
5.5. Lower-Layer Equipment-Dispatching Strategies
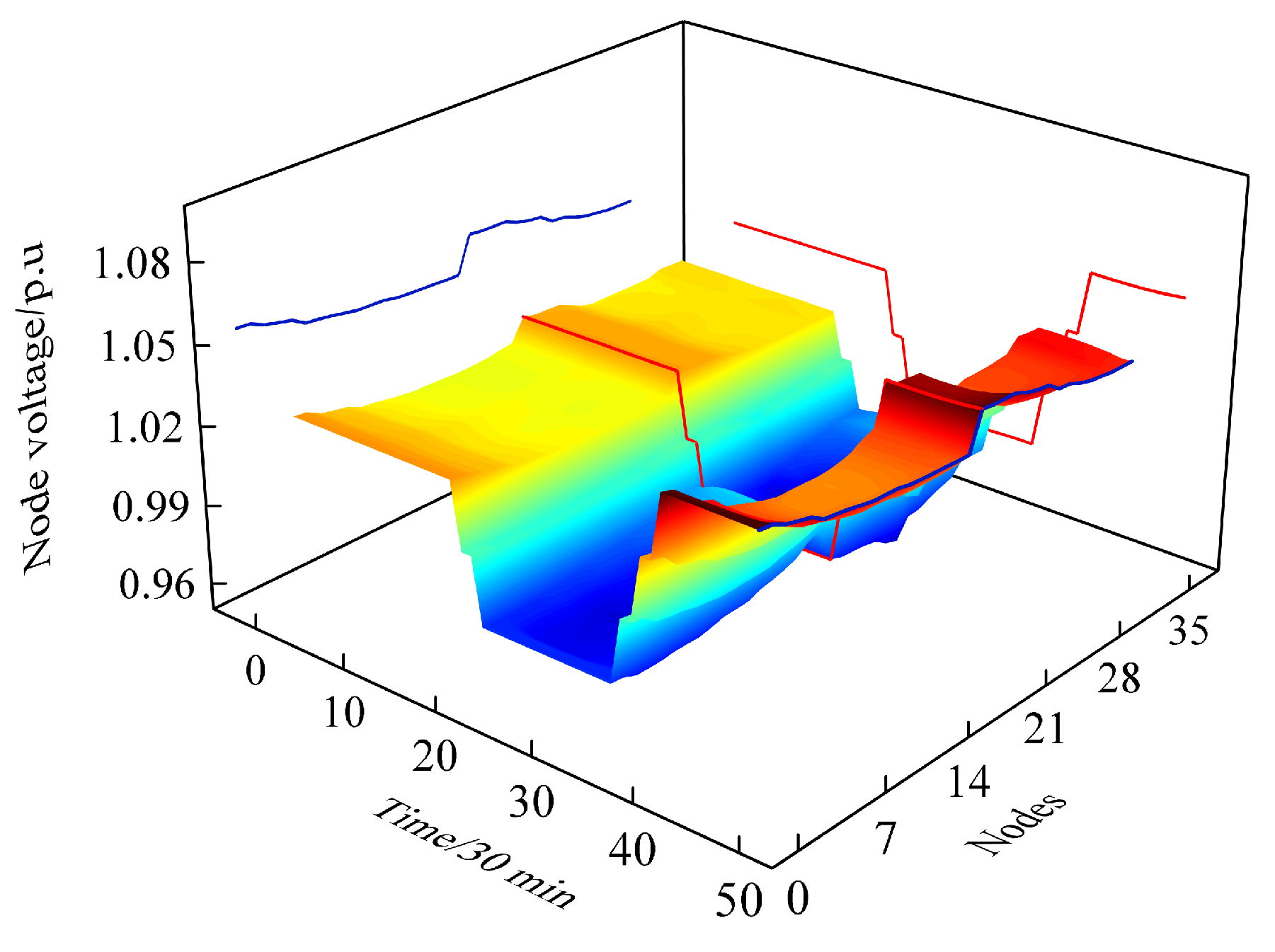
5.6. Optimal Dispatching Results
6. Conclusions
- 1.
- The proposed OLTC linearization method did convert the non-linear OLTC model into linear one under the application of the SOCP power-flow mode, and the proposed OLTC tap-change frequency constraints linearization method made the OLTC model more practical;
- 2.
- The proposed PV inverters control strategy enabled voltage/var control while simultaneously ensuring user benefits;
- 3.
- The proposed comprehensive “key” node selection indexes and the proposed improved K-means algorithm increased the reliability of key node selection;
- 4.
- The proposed two-layer optimization model has led to a 70% reduction in network losses and has successfully maintained all node voltages within qualified limits. This demonstrates that the proposed method is beneficial for both the economic and stable operation of the distribution network.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mehrjerdi, H.; Hemmati, R.; Farrokhi, E. Nonlinear stochastic modeling for optimal dispatch of distributed energy resources in active distribution grids including reactive power. Simul. Model. Pract. Theory 2019, 94, 1–13. [Google Scholar] [CrossRef]
- Kerrouche, S.; Djerioui, A.; Zeghlache, S.; Houari, A.; Saim, A.; Rezk, H.; Benkhoris, M.F. Integral backstepping-ILC controller for suppressing circulating currents in parallel-connected photovoltaic inverters. Simul. Model. Pract. Theory 2023, 123, 102706. [Google Scholar] [CrossRef]
- Song, J.; Jung, S.; Lee, J.; Shin, J.; Jang, G. Dynamic performance testing and implementation for static var compensator controller via hardware-in-the-loop simulation under large-scale power system with real-time simulators. Simul. Model. Pract. Theory 2021, 106, 102191. [Google Scholar] [CrossRef]
- Wang, J.; Yao, L.; Liang, J.; Wang, J.; Cheng, F. Distributed optimization strategy for networked microgrids based on network partitioning. Appl. Energy 2025, 378, 124834. [Google Scholar] [CrossRef]
- Ding, T.; Li, C.; Yang, Y.; Jiang, J.; Bie, Z.; Blaabjerg, F. A two-stage robust optimization for centralized-optimal dispatch of photovoltaic inverters in active distribution networks. IEEE Trans. Sustain. Energy 2016, 8, 744–754. [Google Scholar] [CrossRef]
- Emiliano, D.; Sairaj, V.; Brian, G.; Georgios, B. Optimal dispatch of residential photovoltaic inverters under forecasting uncertainties. IEEE J. Photovoltaics 2014, 5, 350–359. [Google Scholar]
- Emiliano, D.; Sairaj, V.; Brian, G.; Georgios, B. Decentralized optimal dispatch of photovoltaic inverters in residential distribution systems. IEEE Trans. Energy Convers. 2014, 29, 957–967. [Google Scholar]
- González-Moreno, A.; Marcos, J.; Parra, I.; Marroyo, L. Control method to coordinate inverters and batteries for power ramp-rate control in large PV plants: Minimizing energy losses and battery charging stress. J. Energy Storage 2023, 72, 108621. [Google Scholar] [CrossRef]
- Luo, L.; Gu, W.; Zhang, X.-P.; Cao, G.; Wang, W.; Zhu, G.; You, D.; Wu, Z. Optimal siting and sizing of distributed generation in distribution systems with PV solar farm utilized as STATCOM (PV-STATCOM). Appl. Energy 2018, 210, 1092–1100. [Google Scholar] [CrossRef]
- Masoud, F.; Steven, H.L. Branch flow model: Relaxations and convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar]
- Masoud, F.; Steven, H.L. Branch flow model: Relaxations and convexification—Part II. IEEE Trans. Power Syst. 2013, 28, 2565–2572. [Google Scholar]
- Wang, Z.; Kirschen, D.S.; Zhang, B. Accurate semidefinite programming models for optimal power flow in distribution systems. arXiv 2017, arXiv:1711.07853. [Google Scholar]
- Gan, L.; Low, S.H. Convex relaxations and linear approximation for optimal power flow in multiphase radial networks. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–9. [Google Scholar]
- Wu, W.; Tian, Z.; Zhang, B. An exact linearization method for OLTC of transformer in branch flow model. IEEE Trans. Power Syst. 2016, 32, 2475–2476. [Google Scholar] [CrossRef]
- Wolsey, L.A.; Nemhauser, G.L. Integer and Combinatorial Optimization; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Bazaraa, M.S.; Jarvis, J.J.; Sherali, H.D. Linear Programming and Network Flows; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Dasgupta, S.; Baral, A.; Lahiri, A. Optimization of Electric Stress in a Vacuum Interrupter Using Charnes’ Big M Algorithm. IEEE Trans. Dielectr. Electr. Insul. 2022, 30, 877–882. [Google Scholar] [CrossRef]
- Ye, K.; Zhao, J.; Huang, C.; Duan, N.; Zhang, Y.; Field, T.E. A data-driven global sensitivity analysis framework for three-phase distribution system with PVs. IEEE Trans. Power Syst. Trans. Power Syst. 2021, 36, 4809–4819. [Google Scholar]
- Rubén J, S.; Max, F.; Seán, N.; Nick, W.; Graham, N.; Jacek, B.; Janusz, W.B. Hierarchical spectral clustering of power grids. IEEE Trans. Power Syst. 2014, 29, 2229–2237. [Google Scholar]
- Di, S.; Daniel, J.T. A novel bus-aggregation-based structure-preserving power system equivalent. IEEE Trans. Power Syst. 2014, 30, 1977–1986. [Google Scholar]
- Zhao, B.; Xu, Z.; Xu, C.; Wang, C.; Lin, F. Network partition-based zonal voltage control for distribution networks with distributed PV systems. IEEE Trans. Smart Grid 2017, 9, 4087–4098. [Google Scholar]
- Meng, L.; Yang, X.; Zhu, J.; Wang, X.; Meng, X. Network partition and distributed voltage coordination control strategy of active distribution network system considering photovoltaic uncertainty. Appl. Energy 2024, 362, 122846. [Google Scholar]
- Ma, L.; Wang, L.; Liu, Z. Self-organized partition of distribution networks with distributed generations and soft open points. Electr. Power Syst. Res. 2022, 208, 107910. [Google Scholar]
- Li, Y.; Liu, C.; Zhang, L.; Sun, B. A partition optimization design method for a regional integrated energy system based on a clustering algorithm. Energy 2021, 219, 119562. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, J.; Gao, N.; Wen, Q.; Sun, L.; Guo, H. Federated fuzzy k-means for privacy-preserving behavior analysis in smart grids. Appl. Energy 2023, 331, 120396. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, F.; Qi, G.; Li, Y.; Jie, H.; Mazur, N. Power system structure optimization based on reinforcement learning and sparse constraints under DoS attacks in cloud environments. Simul. Model. Pract. Theory 2021, 110, 102272. [Google Scholar] [CrossRef]
- Manzoor, A.; Judge, M.A.; Ahmed, F.; ul Islam, S.; Buyya, R. Towards simulating the constraint-based nature-inspired smart scheduling in energy intelligent buildings. Simul. Model. Pract. Theory 2022, 118, 102550. [Google Scholar] [CrossRef]
- Suryakiran, B.; Nizami, S.; Verma, A.; Saha, T.; Mishra, S. A DSO-based day-ahead market mechanism for optimal operational planning of active distribution network. Energy 2023, 282, 128902. [Google Scholar] [CrossRef]
- Xiang, Y.; Lu, Y.; Liu, J. Deep reinforcement learning based topology-aware voltage regulation of distribution networks with distributed energy storage. Appl. Energy 2023, 332, 120510. [Google Scholar] [CrossRef]
- Miguel, P.; Lukas, O.; Saverio, B.; Florian, D. Adaptive real-time grid operation via online feedback optimization with sensitivity estimation. Electr. Power Syst. Res. 2022, 212, 108405. [Google Scholar]
- Jochen, S.; Thierry, Z.; Giacomo, P.; Damiano, T.; Gabriela, H.; Konstantinos, B. Sensitivity analysis of electric vehicle impact on low-voltage distribution grids. Electr. Power Syst. Res. 2021, 191, 106696. [Google Scholar]
- Pierrou, G.; Wang, X. An online network model-free wide-area voltage control method using PMUs. IEEE Trans. Power Syst. 2021, 36, 4672–4682. [Google Scholar] [CrossRef]
- Elshahed, M.; Tolba, M.A.; El-Rifaie, A.M.; Ginidi, A.; Shaheen, A.; Mohamed, S.A. An artificial rabbits’ optimization to allocate PVSTATCOM for ancillary service provision in distribution systems. Mathematics 2023, 11, 339. [Google Scholar] [CrossRef]
- González-Cabrera, N.; Ortiz-Bejar, J.; Zamora-Mendez, A.; Paternina Mario, R.A. On the Improvement of representative demand curves via a hierarchical agglomerative clustering for power transmission network investment. Energy 2021, 222, 119989. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Hu, S.; Fu, R.; Zhang, Q. Convex Optimization and PV Inverter Control Strategy-Based Research on Active Distribution Networks. Energies 2025, 18, 1793. https://doi.org/10.3390/en18071793
Shi J, Hu S, Fu R, Zhang Q. Convex Optimization and PV Inverter Control Strategy-Based Research on Active Distribution Networks. Energies. 2025; 18(7):1793. https://doi.org/10.3390/en18071793
Chicago/Turabian StyleShi, Jiachuan, Sining Hu, Rao Fu, and Quan Zhang. 2025. "Convex Optimization and PV Inverter Control Strategy-Based Research on Active Distribution Networks" Energies 18, no. 7: 1793. https://doi.org/10.3390/en18071793
APA StyleShi, J., Hu, S., Fu, R., & Zhang, Q. (2025). Convex Optimization and PV Inverter Control Strategy-Based Research on Active Distribution Networks. Energies, 18(7), 1793. https://doi.org/10.3390/en18071793