
Adaptive Line Resistance Estimation and Compensation for Accurate Power Sharing of Droop-Controlled DC Microgrids



Abstract
1. Introduction
- (1)
- A new method is proposed for estimating line resistance by injecting small disturbance signals into the current loop of the Boost converter controller. The method is decentralized in manner and simple to implement.
- (2)
- The variation of DC bus voltage during the line resistance estimation period is considered by employing a Kalman filter (KF) to estimate DC bus voltage fluctuations, which enhances the line resistance estimation accuracy.
- (3)
- The line resistance variation during the DC microgrid operation is addressed in this study. For multi-bus systems, by employing the Y- transform, a multi-bus DC microgrid system can be effectively converted into an equivalent single-bus system. The line resistance is estimated regularly to reduce the power sharing inaccuracy caused by power flow variation and line conductor temperature changes.
- (4)
- The proposed scheme adopts a fully localized control strategy, eliminating the requirement of additional communication links for accurate power sharing. This simplifies the system structure, enhances reliability, and reduces costs.
2. The Proposed Line Resistance Estimation Algorithm
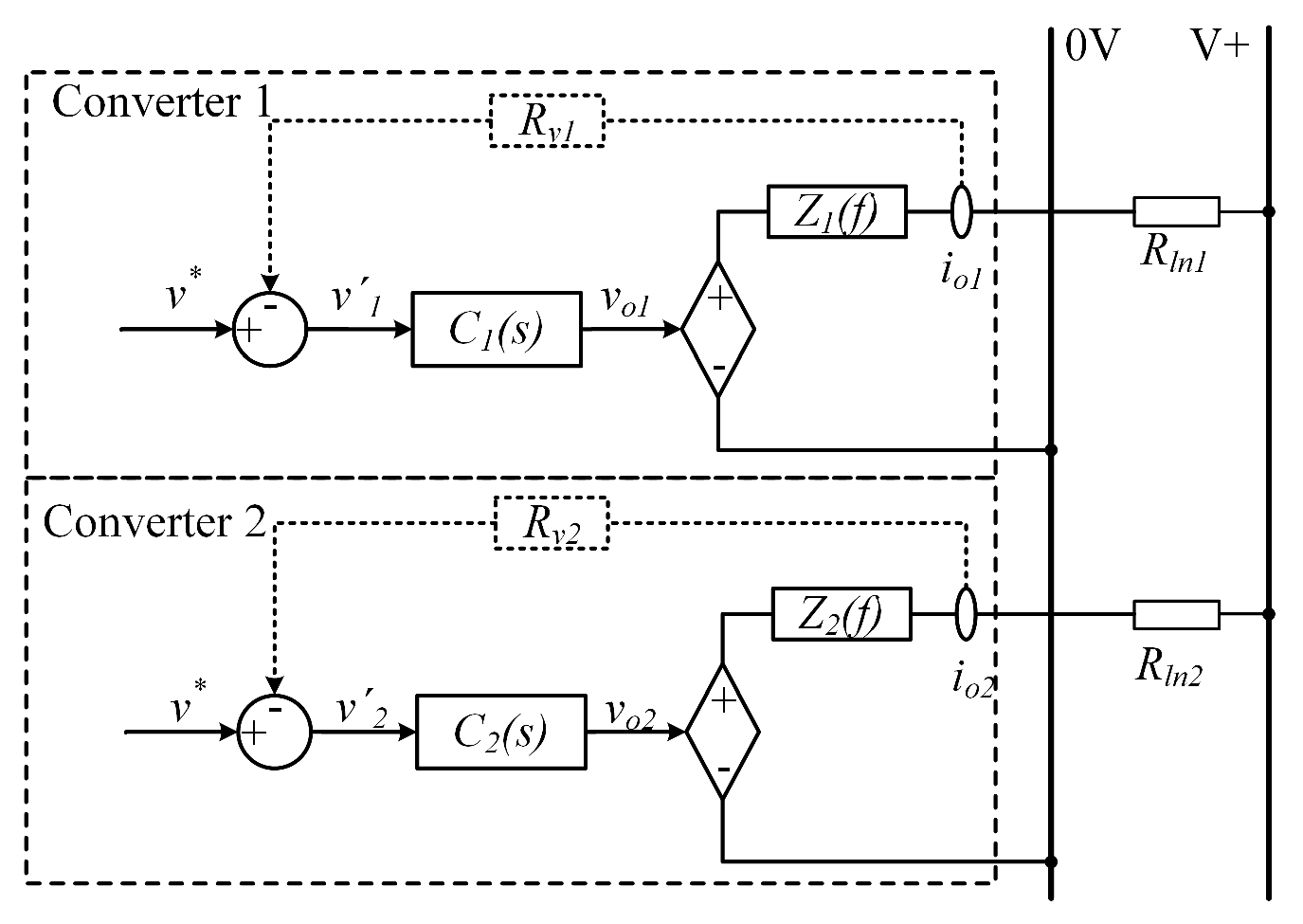
2.1. Problem Formulation
2.2. The Proposed Line Resistance Estimation Method
2.3. Design of the Kalman Filter
2.3.1. Predict
2.3.2. Update
2.4. Line Resistance Compensation
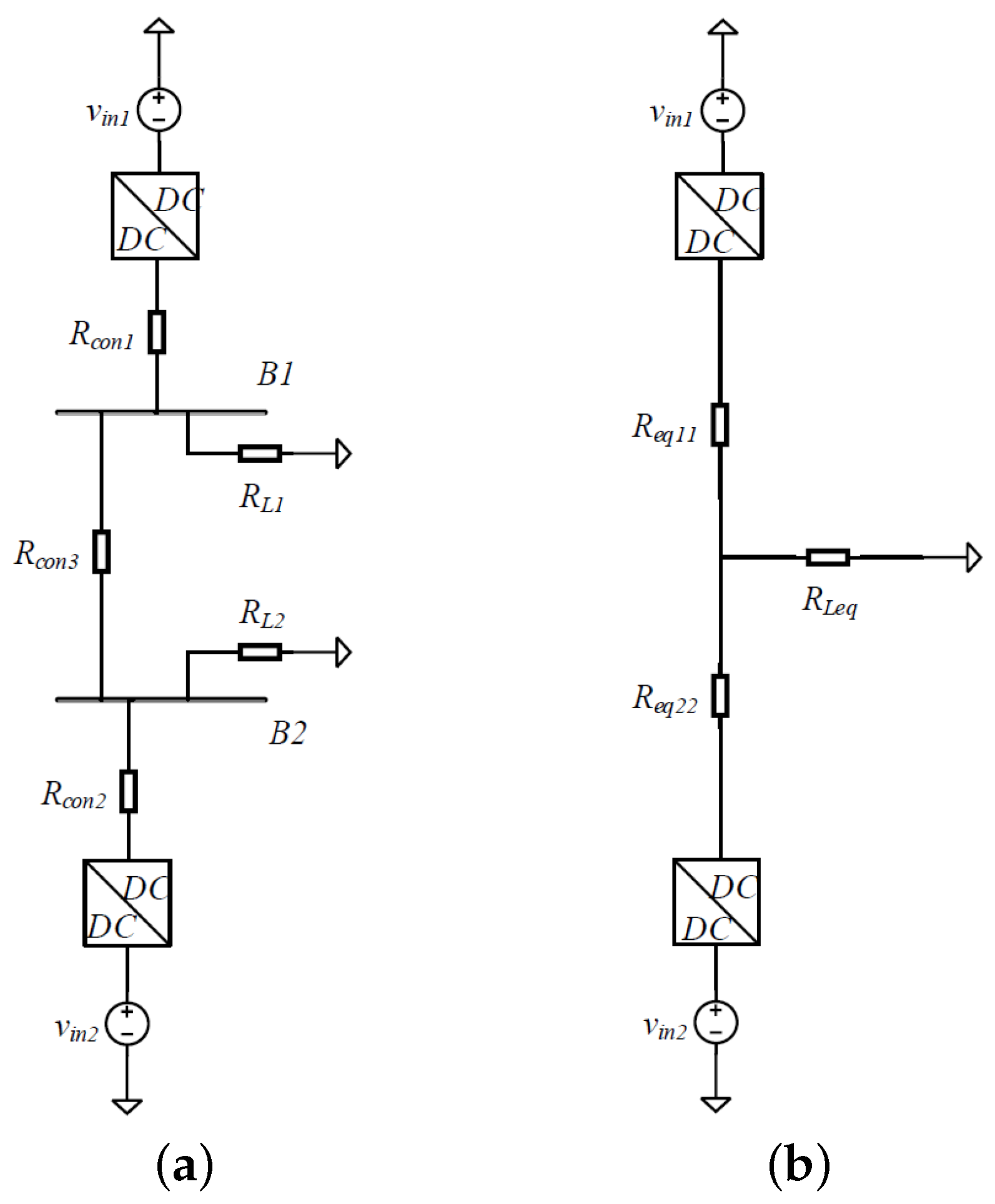
3. Equivalent Line Resistance Estimation for Multi-Bus Systems and Ring-Bus Systems
3.1. Two-Bus DC Microgrid System
3.2. Ring-Bus System
4. Experimental Validation
- A single bus DC microgrid with three power converters.
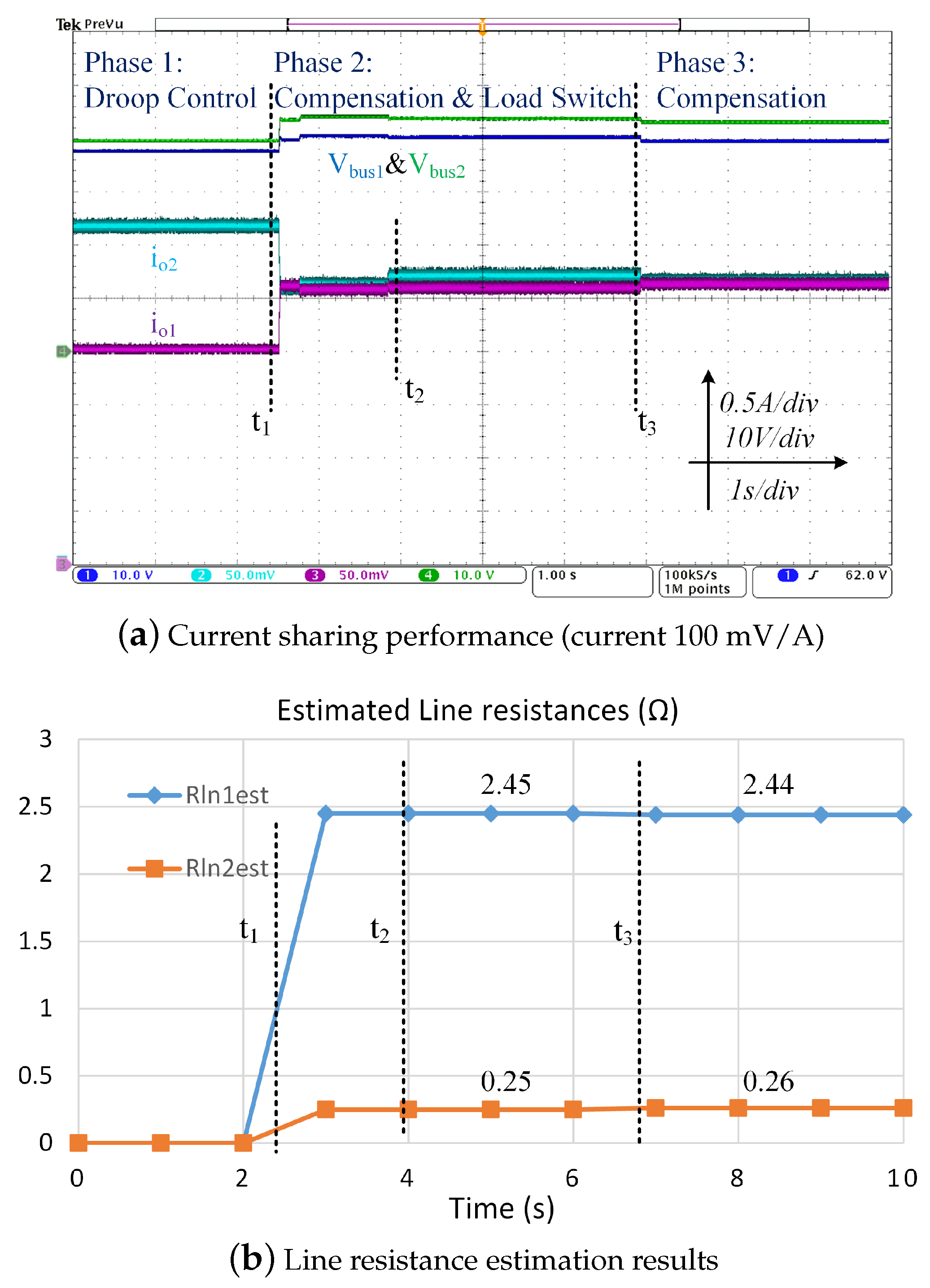
- A two-bus DC microgrid with two power converters.
- A ring-bus DC microgrid with three DC buses and two power converters.
4.1. Experiment 1: Single-Bus DC Microgrid
4.2. Experiment 2: Multi-Bus DC Microgrid
4.3. Experiment 3: Ring-Bus DC Microgrids
4.4. Comparison with Existing Methods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | Power Sharing Performance | Bus Voltage Regulation | Low Cost | Simplicity | |
|---|---|---|---|---|---|
| Single Bus | Multi-Bus | ||||
| Increase Droop Gains [39] | ∘ | ✓ | ✓ | ||
| Adaptive Droop Gains [10,11,12] | ∘ | ✓ | ∘ | ||
| Line Resistance Estimation-Based [8,9,25,26,27,28] | ✓ | ✓ | ✓ | ∘ | |
| LBC-Based Power Sharing [16,17,18,19,20,21,22,23,24] | ✓ | ✓ | ✓ | ✓ | |
| Proposed Algorithm | ✓ | ✓ | ✓ | ✓ | ∘ |
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. System Stability Analysis
References
- Liu, X.; Jiang, L.; Zheng, T.; Zhu, Z. Research on Power Coordination Control Strategy of Microgrid Based on Reconfigurable Energy Storage. Energies 2025, 18, 1040. [Google Scholar] [CrossRef]
- Rana, M.M.; Li, L.; Su, S.W. Cyber attack protection and control in microgrids using channel code and semidefinite programming. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Bhattar, C.L.; Chaudhari, M.A. Centralized Energy Management Scheme for Grid Connected DC Microgrid. IEEE Syst. J. 2023, 17, 3741–3751. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Adegboyega, A.W.; Sepasi, S.; Howlader, H.O.R.; Griswold, B.; Matsuura, M.; Roose, L.R. DC Microgrid Deployments and Challenges: A Comprehensive Review of Academic and Corporate Implementations. Energies 2025, 18, 1064. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. Analysis, Design, and Implementation of Virtual Impedance for Power Electronics Interfaced Distributed Generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- Kumar, R.; Pathak, M.K. Control of DC Microgrid for Improved Current Sharing and Voltage Regulation. In Proceedings of the 2020 3rd International Conference on Energy, Power and Environment: Towards Clean Energy Technologies, Shillong, India, 5–7 March 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Peyghami, S.; Davari, P.; Mokhtari, H.; Loh, P.C.; Blaabjerg, F. Synchronverter-Enabled DC Power Sharing Approach for LVDC Microgrids. IEEE Trans. Power Electron. 2017, 32, 8089–8099. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, J.; Wang, S.; Lu, W.; Qu, K. Active Identification Method for Line Resistance in DC Microgrid Based on Single Pulse Injection. IEEE Trans. Power Electron. 2018, 33, 5561–5564. [Google Scholar] [CrossRef]
- Hailu, T.; Ferreira, J.A. Piece-wise linear droop control for load sharing in low voltage DC distribution grid. In Proceedings of the 2017 IEEE Southern Power Electronics Conference (SPEC), Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An Adaptive Droop Control Scheme for DC Microgrids Integrating Sliding Mode Voltage and Current Controlled Boost Converters. IEEE Trans. Smart Grid 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Lin, Y.; Xiao, W. Novel Piecewise Linear Formation of Droop Strategy for DC Microgrid. IEEE Trans. Smart Grid 2019, 10, 6747–6755. [Google Scholar] [CrossRef]
- Chapaloglou, S.; Abdolmaleki, B.; Tedeschi, E. Optimal Generation Capacity Allocation and Droop Control Design for Current Sharing in DC Microgrids. Energies 2023, 16, 4583. [Google Scholar] [CrossRef]
- Li, W.; Ji, J.; Dong, H.; He, M.; Hu, S. Power Allocation Control Strategy of DC/DC Converters Based on Sliding Mode Control. Energies 2024, 17, 4628. [Google Scholar] [CrossRef]
- Mesbah, M.A.; Sayed, K.; Ahmed, A.; Aref, M.; Elbarbary, Z.M.S.; Almuflih, A.S.; Mossa, M.A. Adaptive Control Approach for Accurate Current Sharing and Voltage Regulation in DC Microgrid Applications. Energies 2024, 17, 284. [Google Scholar] [CrossRef]
- Li, F.; Lin, Z.; Xu, H.; Wang, F. Comprehensive local control design for eliminating line resistance effect on power sharing degradation in DC microgrids. IET Power Electron. 2022, 15, 11–22. [Google Scholar] [CrossRef]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An Improved Droop Control Method for DC Microgrids Based on Low Bandwidth Communication with DC Bus Voltage Restoration and Enhanced Current Sharing Accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar] [CrossRef]
- Wang, P.; Lu, X.; Yang, X.; Wang, W.; Xu, D. An Improved Distributed Secondary Control Method for DC Microgrids With Enhanced Dynamic Current Sharing Performance. IEEE Trans. Power Electron. 2016, 31, 6658–6673. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B.G.; Guerrero, J. Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low-Voltage DC Microgrids. IEEE Trans. Power Electron. 2013, 28, 1900–1913. [Google Scholar] [CrossRef]
- Loh, P.C.; Blaabjerg, F.; Peyghami-Akhuleh, S.; Mokhtari, H. Distributed secondary control in DC microgrids with low-bandwidth communication link. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016; pp. 641–645. [Google Scholar] [CrossRef]
- Nasirian, V.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed Adaptive Droop Control for DC Distribution Systems. IEEE Trans. Energy Convers. 2014, 29, 944–956. [Google Scholar] [CrossRef]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Deshmukh, R.R.; Ballal, M.S. A Supervisory Modified Control Scheme for Power Management in Multi Bus DC Microgrid. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 2282–2287. [Google Scholar] [CrossRef]
- Hoang, K.D.; Lee, H.H. Accurate Power Sharing With Balanced Battery State of Charge in Distributed DC Microgrid. IEEE Trans. Ind. Electron. 2019, 66, 1883–1893. [Google Scholar] [CrossRef]
- Zhuang, X.; Zhang, Q.; Liu, Y.; Zhu, P.; Zeng, Y. Asynchronous Startup of the Paralleled DC-DC Converters in DC Microgrid Based on the Injected Frequency. In Proceedings of the 2021 5th International Conference on Green Energy and Applications (ICGEA), Singapore, 6–8 March 2021; pp. 63–68. [Google Scholar] [CrossRef]
- Bin Shaheed, M.N.; Sozer, Y. Adaptive Line Impedance Estimation Algorithm for DC Microgrid Systems. In Proceedings of the 2021 IEEE Applied Power Electronics Conference and Exposition (APEC), Virtual, 14–17 June 2021; pp. 62–67. [Google Scholar] [CrossRef]
- Fang, M.; Zhang, D.; Qi, X. Real-Time Voltage Drop Compensation Method With Cable Impedance Detection Capability for Remote Power Supply Systems. IEEE Trans. Power Electron. 2023, 38, 9322–9328. [Google Scholar] [CrossRef]
- Jiang, W.; Zhao, J.; Qu, K.; Mao, L.; Zhu, Y.; Liu, H. An Enhanced Drop Control Method for DC Microgrids with Accurate Current Sharing and DC Bus Voltage Restoration. In Proceedings of the 2019 4th International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yichang, China, 6–9 September 2019; pp. 727–731. [Google Scholar] [CrossRef]
- Oh, K.H.; Chun, J.H.; Banerjee, K.; Duvvury, C.; Dutton, R. Modeling of temperature dependent contact resistance for analysis of ESD reliability. In Proceedings of the 2003 IEEE International Reliability Physics Symposium Proceedings, 2003, 41st Annual, Dallas, TX, USA, 30 March–4 April 2003; pp. 249–255. [Google Scholar] [CrossRef]
- Wang, C.; Jiao, S.; Zhang, Y.; Wang, X.; Li, Y. Adaptive Variable Universe Fuzzy Droop Control Based on a Novel Multi-Strategy Harris Hawk Optimization Algorithm for a Direct Current Microgrid with Hybrid Energy Storage. Energies 2024, 17, 5296. [Google Scholar] [CrossRef]
- Tah, A.; Das, D. An Enhanced Droop Control Method for Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC Microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1194–1204. [Google Scholar] [CrossRef]
- Gao, F.; Bozhko, S.; Asher, G.; Wheeler, P.; Patel, C. An Improved Voltage Compensation Approach in a Droop-Controlled DC Power System for the More Electric Aircraft. IEEE Trans. Power Electron. 2016, 31, 7369–7383. [Google Scholar] [CrossRef]
- Dragičević, T.; Guerrero, J.M.; Vasquez, J.C.; Škrlec, D. Supervisory Control of an Adaptive-Droop Regulated DC Microgrid With Battery Management Capability. IEEE Trans. Power Electron. 2014, 29, 695–706. [Google Scholar] [CrossRef]
- Chen, J.; Song, Q. A Decentralized Dynamic Load Power Allocation Strategy for Fuel Cell/Supercapacitor-Based APU of Large More Electric Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 865–875. [Google Scholar] [CrossRef]
- Compensation of droop control using common load condition in DC microgrids to improve voltage regulation and load sharing. Int. J. Electr. Power Energy Syst. 2015, 64, 752–760. [CrossRef]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H.; Iravani, R. Automatic droop control for a low voltage DC microgrid. IET Gener. Transm. Distrib. 2016, 10, 41–47. [Google Scholar] [CrossRef]
- Nikkhajoei, H.; Iravani, R. Steady-State Model and Power Flow Analysis of Electronically-Coupled Distributed Resource Units. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; p. 1. [Google Scholar] [CrossRef]
- Li, Y.W.; Kao, C.N. An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Multibus Microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, L. An Improved Droop Control Method to Improve Bus Voltage and Ensure Accurate Proportional Load Power Sharing in Isolated DC Microgrids. In Proceedings of the 2020 12th IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Nanjing, China, 20–23 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Xiangchen, Z.; Guohui, Z.; Jinbin, Z. Impedance Detection Based on Ripple Analysis and Current Sharing Control in DC Microgrid. IEEE Access 2020, 8, 43554–43562. [Google Scholar] [CrossRef]
- Åström, K.; Murray, R. Feedback Systems: An Introduction for Scientists and Engineers; Princeton University Press: Princeton, NJ, USA, 2008. [Google Scholar]








| Parameters | Value |
|---|---|
| Inductance (, , ) | 520 H/520 H/520 H |
| Capacitance (, , ) | 470 F/470 F/470 F |
| Supplies () | 24 V/24 V/24 V |
| Bus voltage reference () | 48 V |
| Line resistance () | 0.3 /0.2 /0.1 |
| Droop coefficients () | 0.7 /0.7 /0.7 |
| Resistor load () | 100 |
| Switching frequency () | 25 kHz |
| Current probe | TextronixA622 (100 mV/A) |
| Parameters | Value |
|---|---|
| Inductance (, ) | 520 H/520 H |
| Capacitance (, ) | 470 F/470 F |
| Supplies () | 24 V/24 V |
| Bus voltage reference () | 48 V |
| Line resistance () | 2.4 /0.2 |
| DC bus line resistance () | 0.1 |
| Droop coefficients () | 2.8 /2.8 |
| Resistor load () | 100 |
| Switch frequency () | 25 kHz |
| Current probe | TextronixA622 (100 mV/A) |
| Parameters | Value |
|---|---|
| Inductance (, ) | 520 H/520 H |
| Capacitance(, ) | 470 F/470 F |
| Supplies () | 24 V/24 V |
| Bus voltage reference () | 48 V |
| Line resistance between buses () | 0.1 /0.1 /0.1 |
| Line resistance () | 0.2 /0.1 |
| Droop coefficients () | 0.5 /0.5 |
| Resistor load () | 100 |
| Switch frequency () | 25 kHz |
| Current probe | TextronixA622 (100 mV/A) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, X.; Lin, Z.; Jiang, W.; Lee, H. Adaptive Line Resistance Estimation and Compensation for Accurate Power Sharing of Droop-Controlled DC Microgrids. Energies 2025, 18, 2183. https://doi.org/10.3390/en18092183
Qin X, Lin Z, Jiang W, Lee H. Adaptive Line Resistance Estimation and Compensation for Accurate Power Sharing of Droop-Controlled DC Microgrids. Energies. 2025; 18(9):2183. https://doi.org/10.3390/en18092183
Chicago/Turabian StyleQin, Xiangyu, Zhengyu Lin, Wei Jiang, and Hazel Lee. 2025. "Adaptive Line Resistance Estimation and Compensation for Accurate Power Sharing of Droop-Controlled DC Microgrids" Energies 18, no. 9: 2183. https://doi.org/10.3390/en18092183
APA StyleQin, X., Lin, Z., Jiang, W., & Lee, H. (2025). Adaptive Line Resistance Estimation and Compensation for Accurate Power Sharing of Droop-Controlled DC Microgrids. Energies, 18(9), 2183. https://doi.org/10.3390/en18092183