1. Introduction
The power-split hybrid drive system which employs the planetary gear and two electric machines is the most advanced and successful electric drive system among hybrid systems at present. It integrates the advantages of the parallel and series hybrid drive systems. Another power-split hybrid system which is called compound-structure permanent-magnet synchronous machine (CS-PMSM) system in this paper represents a new development direction in the field of hybrid systems [
1,
2,
3,
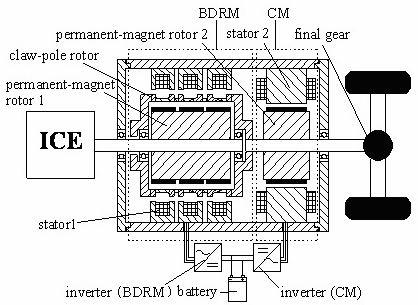
4]. It employs a generator and a motor to adjust the torque and speed difference between the engine and the load, providing the function of the continuously variable transmission (CVT). One topology of the CS-PMSM is shown in
Figure 1.
Figure 1.
CS-PMSM system.
Figure 1.
CS-PMSM system.
Compared with planetary gear unit, the CS-PMSM is a competitive concept for hybrid electric vehicle (HEV) drivetrain due to its compact structure and high efficiency [
5,
6,
7]. But it has a significant disadvantage: the rotating windings need brushes and slip rings. This may cause problems such as friction losses, maintenance, cooling and so on [
8].
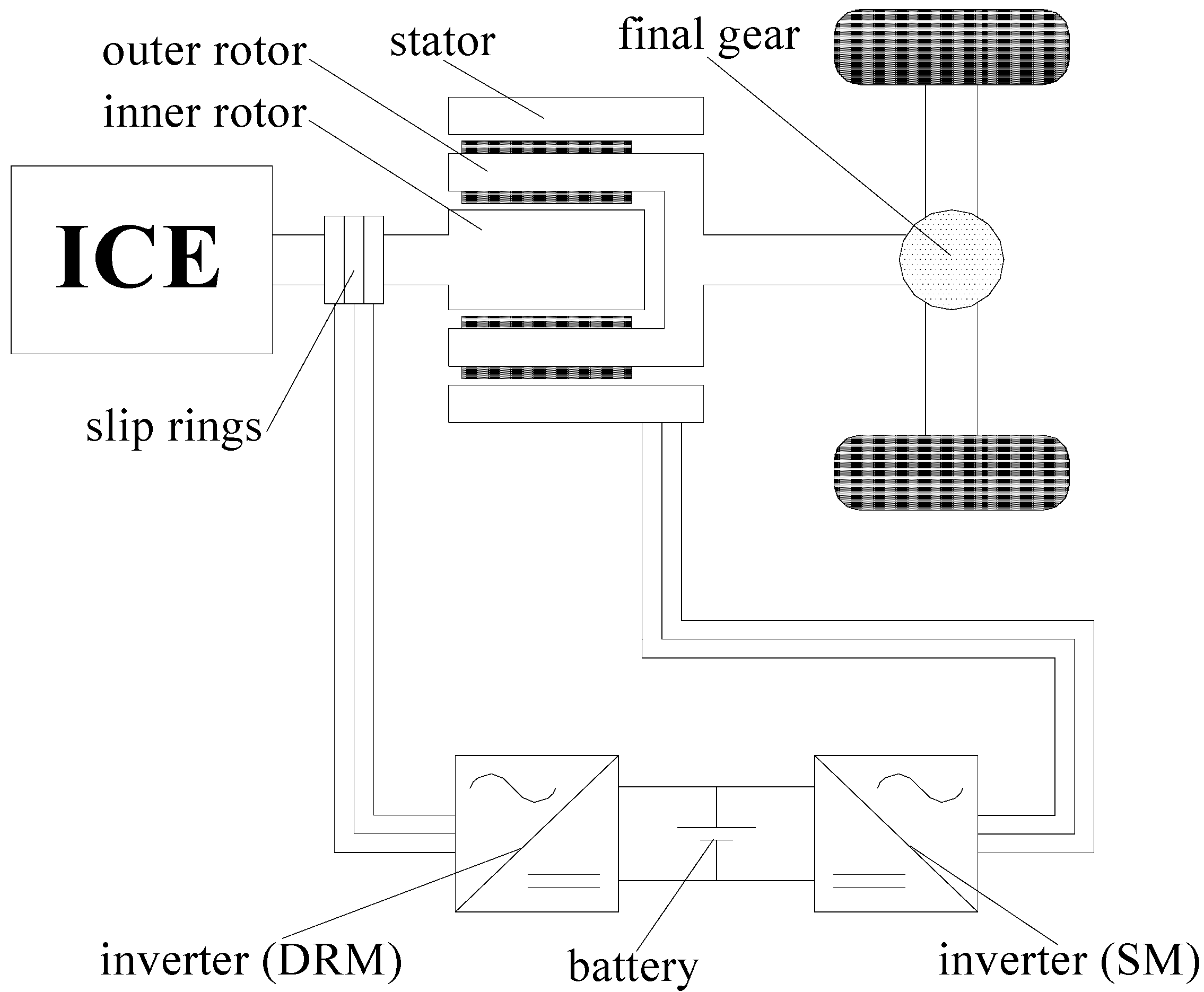
To solve this problem, a novel brushless double rotor machine (BDRM) is proposed in this paper. The BDRM is an important component in the new brushless CS-PMSM system, which is shown in
Figure 2. In the brushless CS-PMSM system, the permanent-magnet rotor 1 is connected to the internal combustion engine (ICE), and the claw-pole rotor is connected to the load. Since the claw-pole rotor and permanent-magnet rotor 1 can operate at different speeds, the ICE can operate at the optimum speed independent of the load. BDRM transfers the ICE torque directly to the load, and conventional machine (CM) adds/subtracts additional torque to/from the load and in this way the output torque demand is always satisfied independent of ICE operation.
Figure 2.
Brushless CS-PMSM system.
Figure 2.
Brushless CS-PMSM system.
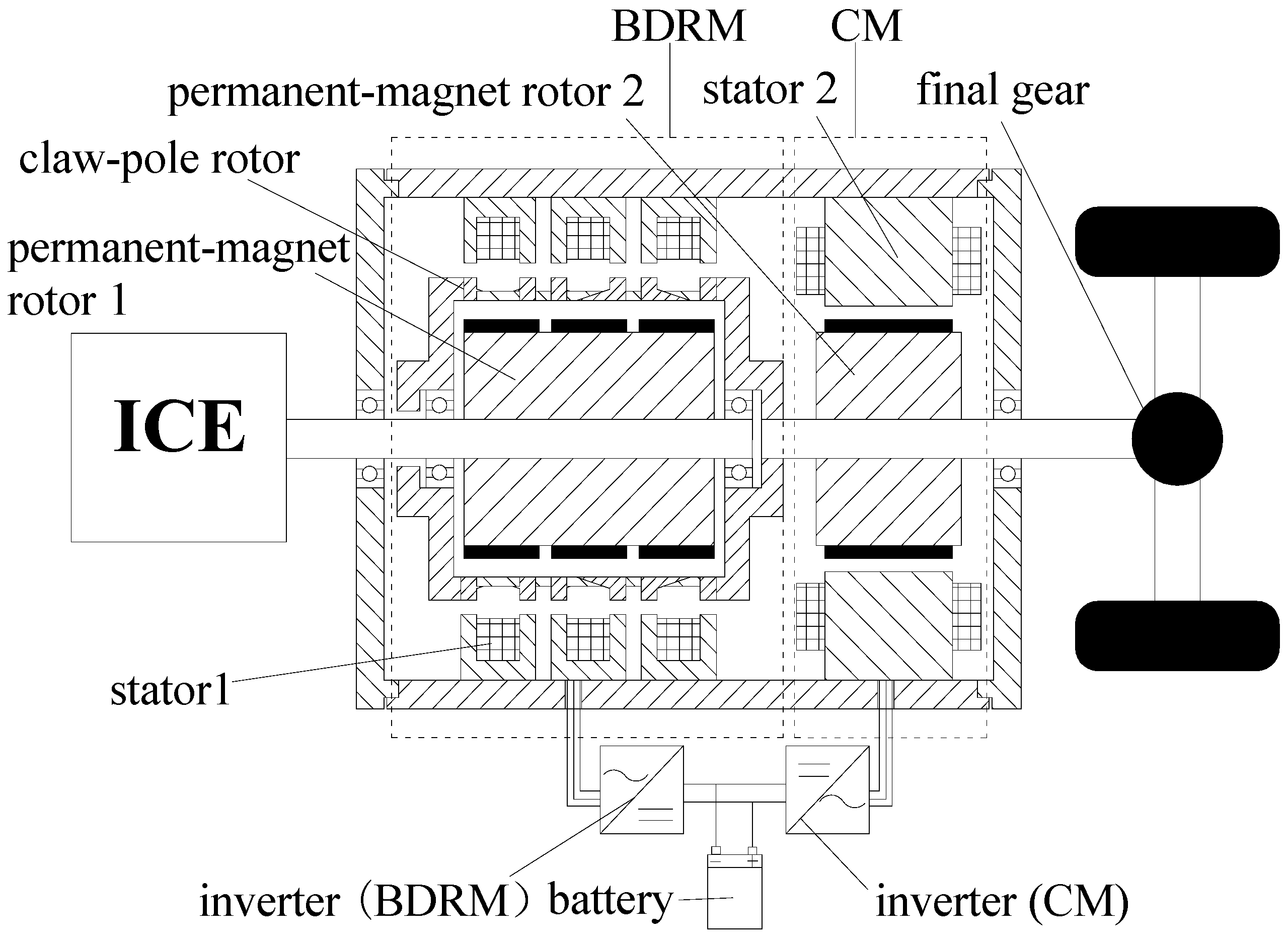
The power flow path in the brushless CS-PMSM system is shown in
Figure 3. Five typical operation states of the power-split hybrid drive system are shown in
Figure 4. In pure electric mode, the vehicle wheels are simply driven by the CM, as shown in
Figure 4(a). In ICE starter mode, only the BDRM works and the power flow is illustrated in
Figure 4(b). In CVT mode, the electricity generated by the BDRM supplies the CM, the torque and speed of the ICE are changed to meet the torque and speed required at the wheels, as illustrated in
Figure 4(c). When the power required at the wheels is higher than the power input from the ICE, the battery will provide the rest power through the brushless CS-PMSM, as shown in
Figure 4(d). The CM can also work as a generator to recover the brake energy and the power flow is shown in
Figure 4(e).
Figure 3.
Power flow path in the brushless CS-PMSM system.
Figure 3.
Power flow path in the brushless CS-PMSM system.
Figure 4.
Typical operation states of the power-split hybrid drive system: (a) Pure electric mode; (b) ICE starter mode; (c) CVT mode; (d) Acceleration and hill climbing mode; (e) Braking mode.
Figure 4.
Typical operation states of the power-split hybrid drive system: (a) Pure electric mode; (b) ICE starter mode; (c) CVT mode; (d) Acceleration and hill climbing mode; (e) Braking mode.
The relationship between the speed of the claw-pole rotor and permanent-magnet rotor 1, angular frequency of the stator 1 windings is shown in (1):
where
Ωc is the mechanical speed of the claw-pole rotor (rad/s);
Ωp is the mechanical speed of the permanent-magnet rotor 1 (rad/s);
ωs the angular frequency of the stator winding current (rad/s);
p is the pole-pair number of the BDRM.
The output torque of the shaft comprises the torque of the BDRM and the torque of the CM:
where
TCM is the torque of the CM, which can be positive and negative, depending on the torque difference between the ICE and output demand, and
ΤBDRM is the torque of the BDRM.
Without considering various losses of the two machines, the output mechanical power is:
where
PICE is the input mechanical power of the ICE,
Ρbattery is the input power of the battery,
PCM is the electromagnetic power of the CM and
PBDRM is the electromagnetic power of the BDRM.
The whole brushless CS-PMSM system employs the BDRM and the CM to adjust the speed and torque difference between the ICE and the load. The removal of mechanical planetary gear and brushes greatly reduces both mechanical cogging noise and maintenance cost of the power-split HEV system. Besides, the proposed BDRM has several other features especially interesting for HEVs: (1) as the stator coil is close to the motor case, the windings can be cooled by conventional methods and the BDRM is expected to have better thermal performance which is a significant advantage for vehicle applications; (2) there are no end windings in the BDRM, the slot shapes and dimensions of the stator have high design freedom and the slot fill factor can be extremely high, so the copper loss is low and the vehicle space can be effectively used; (3) the stator windings and stator cores are simple and easy to manufacture, which helps reduce the cost of HEVs. All the above advantages make the BDRM promising for power-split HEV applications.
2. Basic Topology and Magnetic Circuit Model of the BDRM
The BDRM is a new type of 3-phase claw-pole machine with two air gaps and is composed of three parts: stator 1, claw-pole rotor and permanent-magnet rotor 1. Claw-pole rotor is located between the stator 1 and the permanent-magnet rotor 1. There is an outer air gap between claw-pole rotor and stator 1, and an inner air gap between claw-pole rotor and permanent-magnet rotor 1.
The circular magnetic field formed by stator 1 is modulated by the claw-pole rotor and is distributed in the circumferential direction. In this way, it is possible to drag the permanent-magnet rotor 1 to rotate at its synchronous speed and to change the speed difference between the claw-pole rotor and permanent-magnet rotor 1.
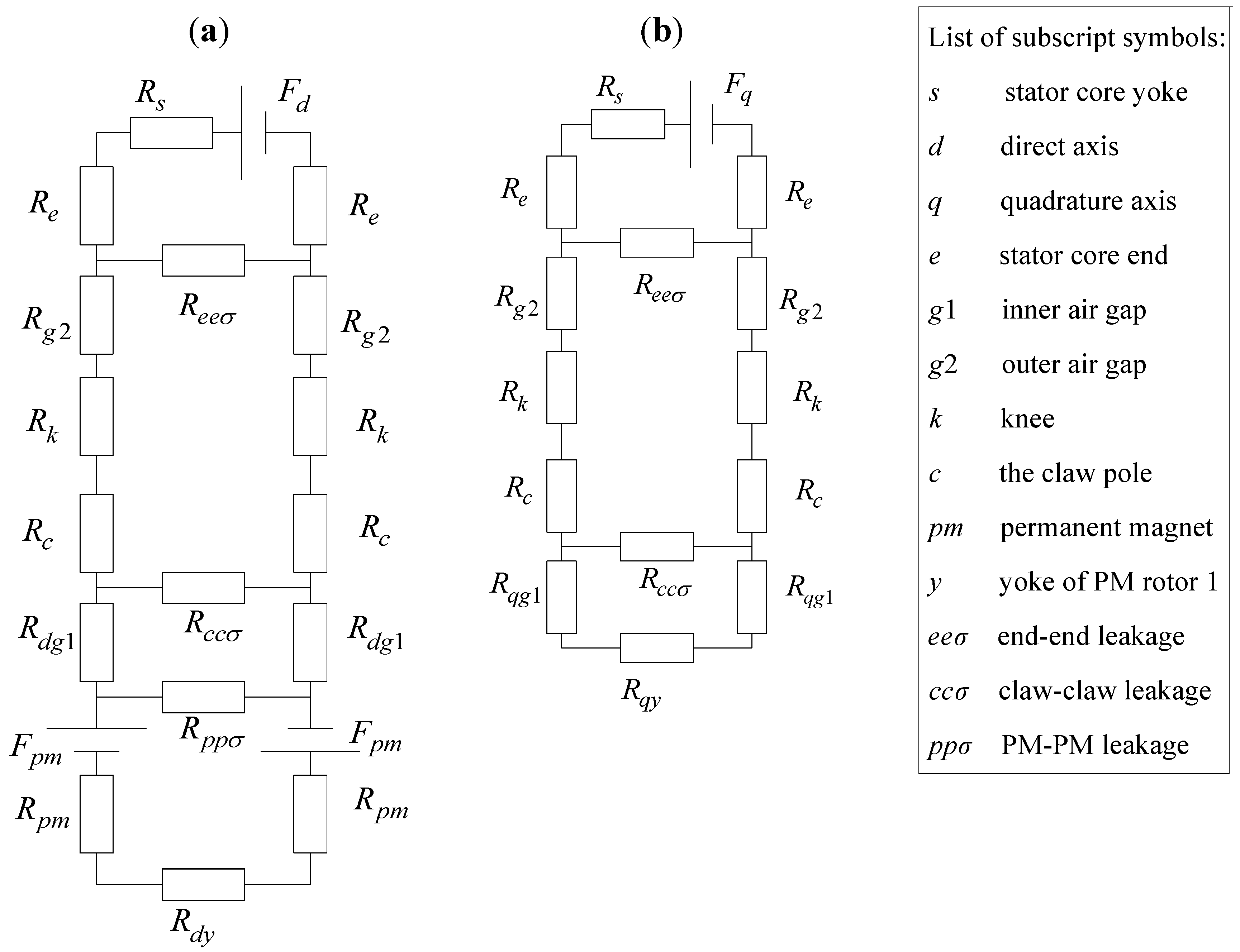
Figure 5 shows the flux path for one pole of the BDRM, where the arrow stands for the flux direction. The d- and q-axis equivalent magnetic circuits with load are shown in
Figure 6. In
Figure 6, symbol
R represents the reluctance, symbol
F represents the magnetomotive force (MMF) and their subscript symbols are explained by the remark of
Figure 6 on the right. It can be seen from
Figure 5 and
Figure 6 that the flux in BDRM is distributed in three dimensions, which makes its analysis and modeling more complicated.
Figure 5.
Flux path in one pole of the BDRM.
Figure 5.
Flux path in one pole of the BDRM.
Figure 6.
Equivalent magnetic circuit diagrams with load: (a) d-axis; (b) q-axis.
Figure 6.
Equivalent magnetic circuit diagrams with load: (a) d-axis; (b) q-axis.
3. Reactance Parameters of the BDRM
Compared with traditional PMSMs, the BDRM has a different winding form, one more air gap and more complex leakage flux paths. It is therefore pertinent to analyze the new parameter characteristics. In order to simplify analysis, considering the non-salient pole situation, the reactance of d-axis is the same with that of q-axis. With the help of the q-axis equivalent magnetic circuit shown in
Figure 6(b), reactance parameters can be deduced. The leakage inductance between the stator core ends is calculated by:
where
,
p is the pole-pair number,
N is the number of stator-coil turns,
I is its current value,
Φeeσ is the leakage flux passing through
Reeσ.
The leakage inductance between the claws can be calculated by:
where
Φccσ is the leakage flux passing through
Rccσ.
Thus, the leakage reactance of the armature winding per phase can be calculated by:
where
f is the frequency of the current.
The armature reaction reactance of the winding per phase is calculated by:
where
Φa is the main flux passing through
Rqg1.
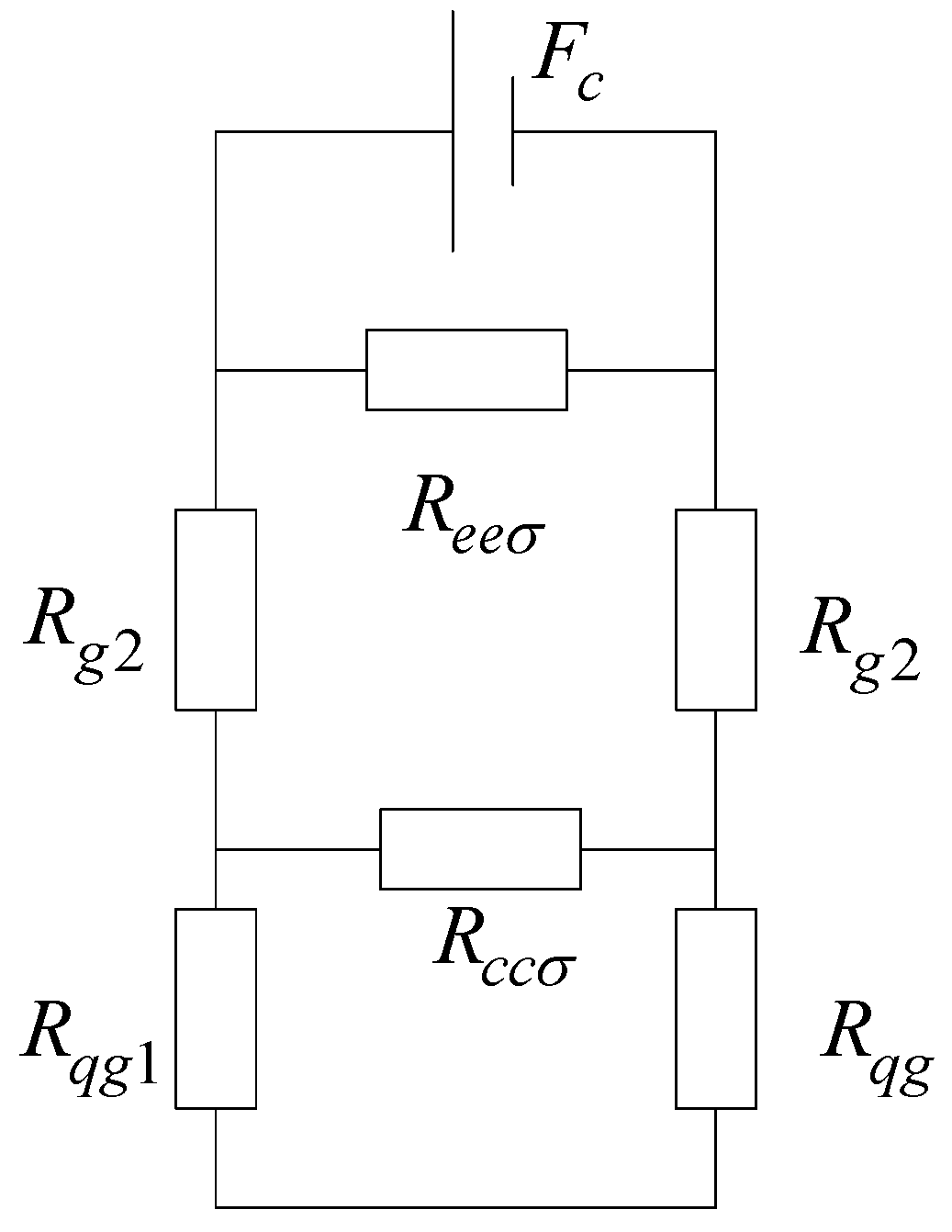
The reluctance of ferromagnetic materials is not a constant but changes with the flux density. For approximate calculation, it can be assumed that the permeability of ferromagnetic materials
. Then the magnetic circuit can be simplified as shown in
Figure 7 and the simplified reactance expressions can be obtained as in Equations (8)–(11).
Figure 7.
Simplified magnetic circuit.
Figure 7.
Simplified magnetic circuit.
4. Sizing and Torque Equations of the BDRM
The stator windings are embedded in the inner surface of stator 1, so the general definition of electric load can not properly reflect the real status in BDRM. A new definition of electric loading is given as the current sum per axial armature length:
where
lef is the effective axial length of single-phase BDRM.
The new sizing and torque equations of the BDRM is derived as:
where
P’ is the output apparent power,
D1 is the inner diameter of the claw-pole rotor,
n is the synchronous speed,
m is the phase number,
Kw is the winding factor,
αp’ is the effective pole arc coefficient,
Bδ1 is the maximum flux density in the inner air gap,
σ1 is the leakage factor of the flux from the inner air gap into the outer air gap,
σ2 is the leakage factor of the flux from the outer air gap into the stator core.
It can be seen from Equations (13) and (14) that the sizing and torque equations of the BDRM are different from those of traditional PMSMs. When the motor constant CA remains unchanged, the output apparent power P’ is proportional to the inner diameter of the claw-pole rotor D1, the pole-pair number p, the synchronous speed n, and the square of the motor axial length lef. Special size characteristics of the BDRM can be drawn from analysis of Equations (13) and (14):
Theoretically, simply increasing the pole-pair number p can increase the output power. The output power is proportional to the square of the motor axial length lef, which means that a larger lef can lead to a higher power density. Appropriate reduction of the inner diameter of the claw-pole rotor D1 can increase the power density. The MMF of the winding per phase is proportional to the number of turns per phase and the changes of the pole-pair number p will not affect the MMF.
5. Power Factor Analysis of the BDRM
Results from analytical and finite element method (FEM) calculation show that the power factor of BDRM, about 0.5~0.75, is low. This results from the special configuration of BDRM, which brings about a serious leakage flux in the magnetic circuit.
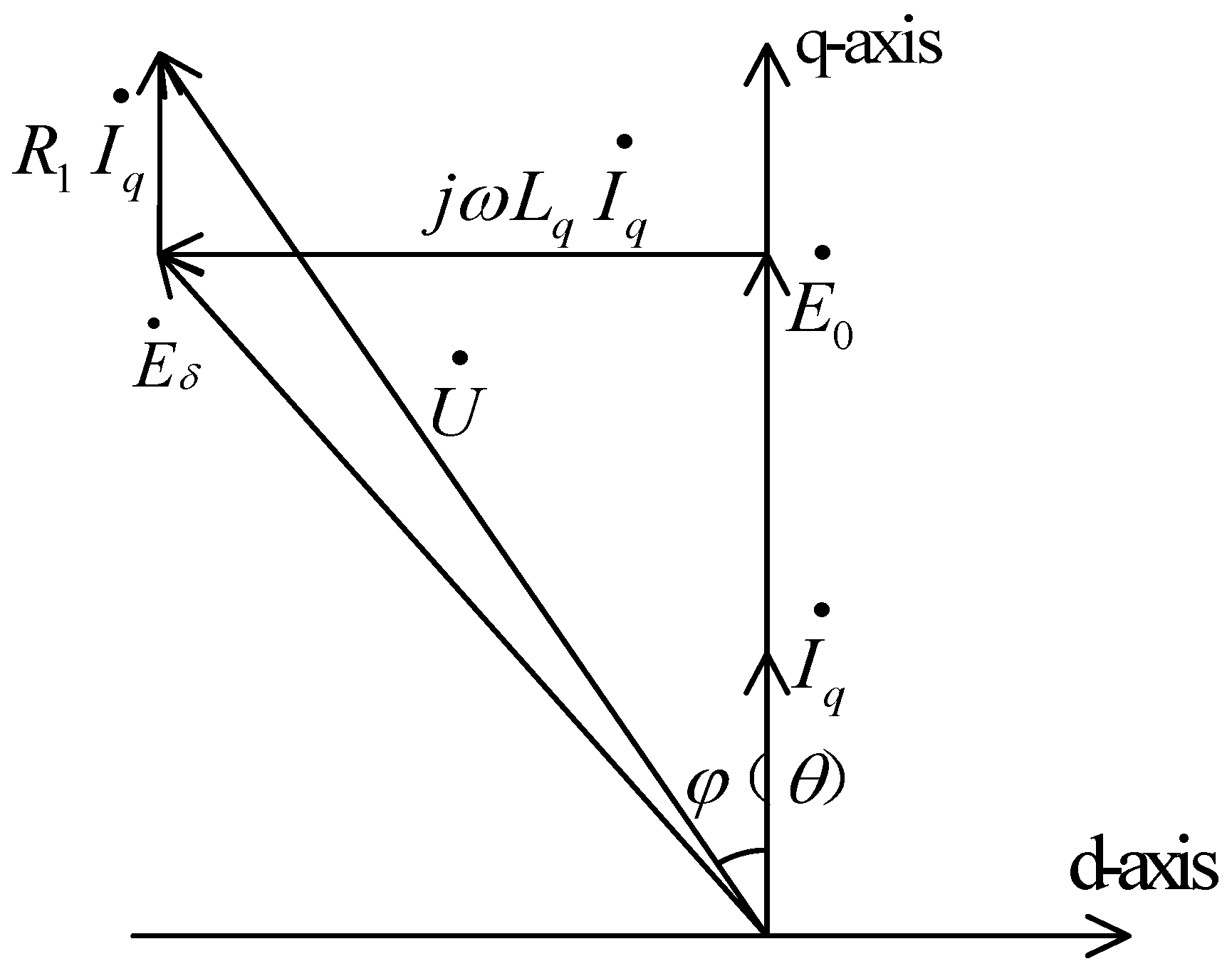
The relation of all electromagnetism parameters of BDRM can be denoted in electric performance by the phasor diagram of the synchronous motor.
Figure 8 shows the phasor diagram of the BDRM when
Id = 0, where
E0 and
Eδ are the fundamental back electromotive forces (BEMFs) at no-load and load operations,
Id,
Iq are the d- and q-axis armature currents,
R1 is the armature resistance,
U is the voltage fed by external circuit,
Lq is the q-axis inductance,
ω is the radian frequency,
θ is the torque angle and
φ is the power factor angle.
Figure 8.
Phasor diagram when Id = 0.
Figure 8.
Phasor diagram when Id = 0.
Neglecting the small voltage drop across phase resistance, the power factor could be expressed as:
and if unsaturated:
where
Φi is the flux induced by armature current only,
Φm is the flux induced by permanent magnets only.
This equation could be further transformed to:
Equations (16) and (17) present the basic factors affecting the power factor. By decreasing the armature current while Φm is fixed, the power factor will be enhanced and the torque density of BDRM will fall at the same time. By reducing the pole number of BDRM when the leakage flux between the claws is reduced, the power factor is slightly enhanced. For both methods, a compromise between the torque density and the power factor must be made. Another effective way to improve the power factor and enhance torque density at the same time is to simply enhance Φm, but more permanent magnets increase the cost of the machine, and this is clearly not attractive in practice, so in order to obtain the best performance, a compromise among all parameters should be made.
It is of course possible to alter the timing of the position sensors which control inverter switching so as to change the phase of the current I relative to E0. This raises the question whether such timing adjustment could be used to improve power factor in BDRM.
It can be assumed that
ψ is the leading angle of
I to
E0,
Id =
I∙sin
ψ,
Iq =
I∙cos
ψ, then the power factor could be expressed as:
where
Xd,
Xq are the d- and q-axis synchronous reactance.
In the instance that the magnitude of
I remains unchanged, after putting FEM results of
E0,
Xd,
Xq into Equation (18), variation of power factor with respect to
is shown in
Figure 9.
Figure 9.
Power factor versus .
Figure 9.
Power factor versus .
As shown in
Figure 9, a higher power factor is achieved with a greater d-axis current. However, to achieve a maximum torque for given current, the current
I must be in phase with
E0, and a greater d-axis current means that sacrifice of torque is inevitable. The compromise between the torque density and the power factor must also be made.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






