Nonintrusive Energy Monitoring for Microgrids Using Hybrid Self-Organizing Feature-Mapping Networks


Abstract
:1. Introduction
- (1)
- NEM must consider the intermittent nature of renewable energies (e.g., wind-turbine) in a micro grid; a NALM-based residential home generally does not have a power resource.
- (2)
- Three-phase and non-characteristic loads (e.g., cyclo-converters of varying non-integer harmonics) are becoming more popular in microgrids but most appliances are single-phase with characteristic loads (e.g., 4-pulse converters).
- (3)
- The purpose of NEM in a microgrid is to monitor power generation from distributed generators and power consumption by individual loads; the purpose of NALM in a residential home is to determine the energy consumption pattern of individual appliances.
2. Problem Description
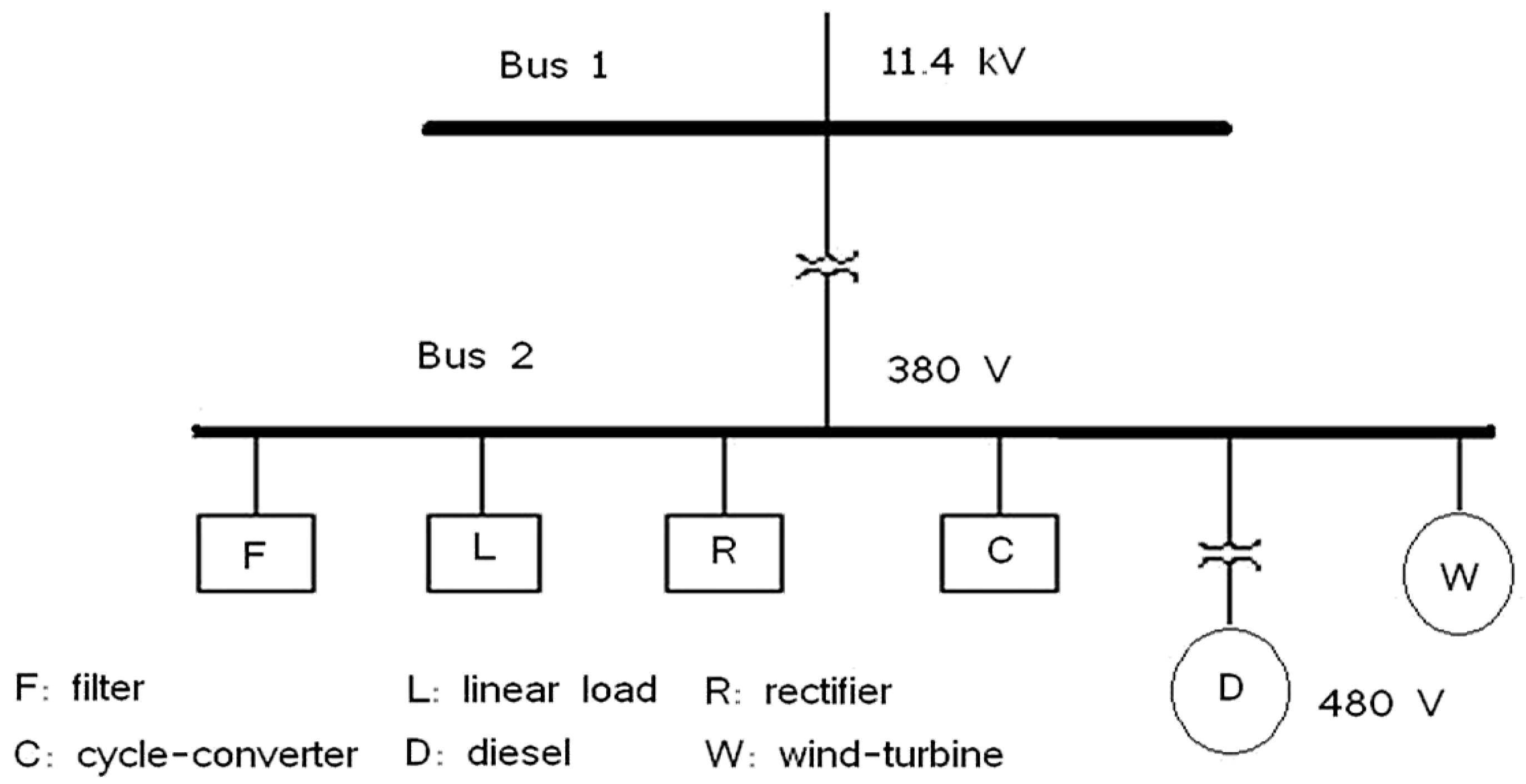
2.1. Microgrid


2.2. Nonintrusive Energy Monitoring
2.3. Assumptions
- (1)
- The signatures of signals used to be studied in the microgrid have been properly filtered: The measured signals are attained through CT/PT. The noise-free signals are used for analysis.
- (2)
- The three-phase system is balanced at the PCC: This paper uses the concept of the CERTS microgrid, so the microgrid must satisfy IEEE Sd. 1547. Any minor imbalance within the IEEE Sd. 1547 limit at the PCC is ignored.
- (3)
- The number and types of individual loads are known: the individual loads in a microgrid are not like the appliances in a house, where privacy is important. Hence, the types of loads (e.g., 6-pluse converter and cyclo-converter) can be known.
- (4)
- The different operational levels of individual loads are known: large loads are operated at discrete levels, from their rated (peak) to their off-peak levels, or even the outage state.
- (5)
- Only energy monitoring is considered: Policy-making, using the results of energy monitoring, is not considered in this paper. The measured/filtered data is continuously sent to a PC in a control center. The proposed hybrid SOFMNN outputs one level of each load and one level of the wind-turbine generator at a time. Because transients caused by load switching only last tens or hundreds of milliseconds, consecutive steady-state levels for each individual load can be determined using the proposed method.
3. The Proposed Method
3.1. Concept of Hybrid Neural Networks
- (1)
- All components in the FFT spectrum are not equally important. Some FFT components are trivial and should be ignored by further investigation.
- (2)
- The significant topological structures of the signatures must be arranged to train the supervised neural network. A sequence of ascending frequencies for V, I, P and Q may be inefficient to train the neural network.
3.2. Traditional Self-Organizing Feature-Mapping Neural Network

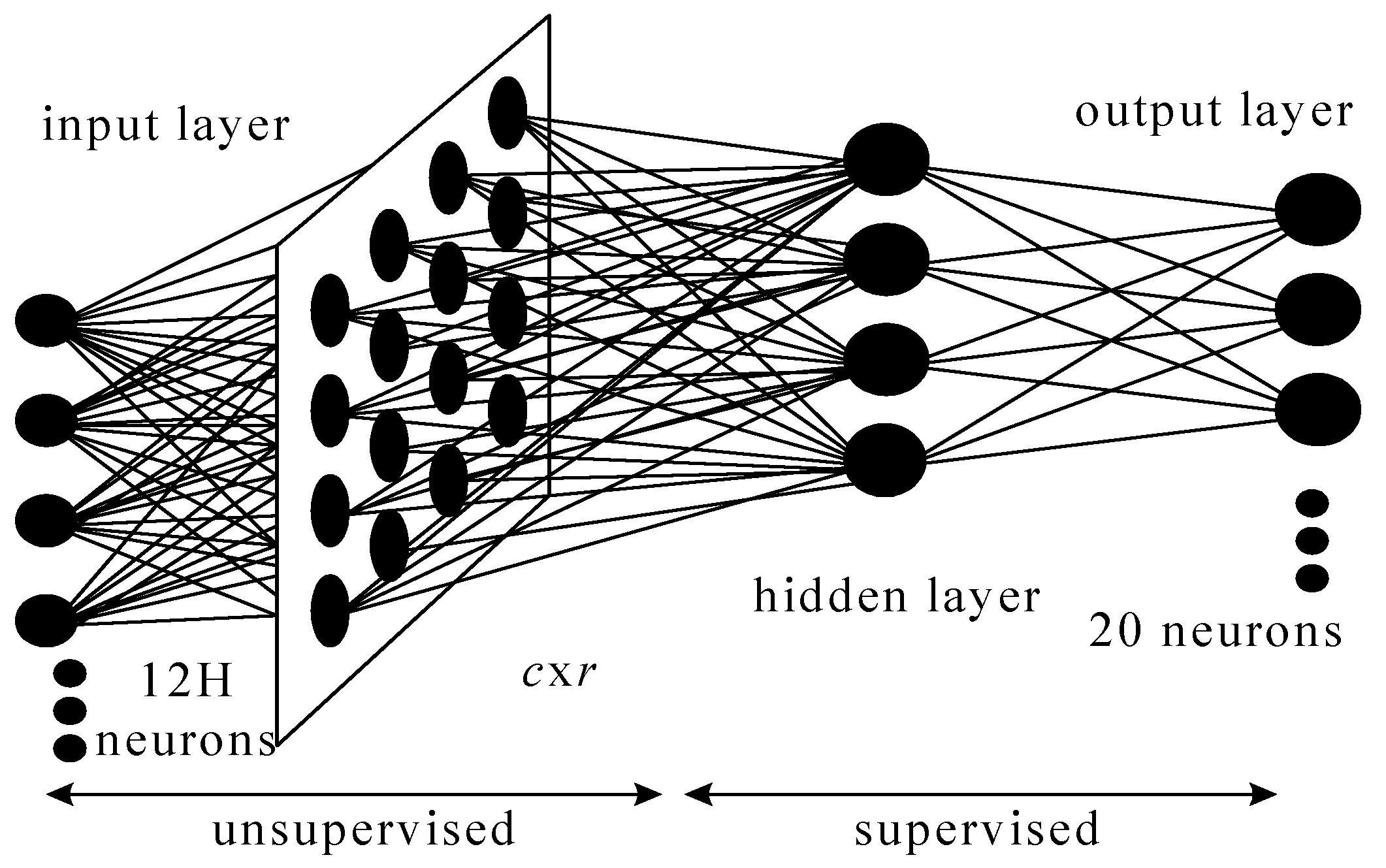
3.3. Hybrid Self-Organizing Feature-Mapping Neural Network
- (1)
- The inputs are the FFT components of the V/I/P/Q, measured at the PCC. Two components are also identified, between any two consecutive integer harmonics. For example, the components of 80 and 100 Hz are identified, between h = 1 (60 Hz) and h = 2 (120 Hz). In this example (H = 2), the number of the input neurons is 4 × 3 × 2 (V/I/P/Q with frequencies of 20, 40, 60, 80, 100 and 120 Hz). The term “3” is not relevant to three phases but subharmonics and interharmonics. Let H = 14. Hence, the proposed hybrid SOFMNN has 4 × 3 × 14 (= 168) input neurons; that is, p = 4 × 3 × 14, where p is defined in Section 3.2.
- (2)
- The second layer is usually a 2-dimensional layer. The size is N (defined in Section 3.2), equal to c × r (c is the number of neurons in the columns; r is the number of neurons in the rows). This is discussed in Section 4.
- (3)
- The third layer is the hidden layer, which is the same as the first layer of the supervised neural network. The number of third layer is approximated by (N + 20)/2, where 20 is the number of output neurons (see (4) below).
- (4)
- The number of output neurons in the supervised neural network depends on the numbers of loads and the renewable energy sources. For example, the studied microgrid has one linear load, one converter (rectifier) load, one cyclo-converter load and one wind-turbine-generator. Assume that the loads are operated at their discrete levels (see Section 2.3). Then, there are 20 output neurons (binary bits), which are defined, as follows:
- (a)
- 1st–5th bits: 0%, 25%, 50%, 75% and 100% of the rated size for the linear loads.
- (b)
- 6th–10th bits: 0%, 25%, 50%, 75% and 100% of the rated size for the converter loads.
- (c)
- 11st–15th bits: 0%, 25%, 50%, 75% and 100% of the rated size for the cyclo-converter loads.
- (d)
- 16th–20th bits: 0%, 0%–25%, 25%–50%, 50%–75% and 75%–100% of the rated power generated by the wind-turbine-generator.
4. Simulation Results
4.1. Description of the Studied System

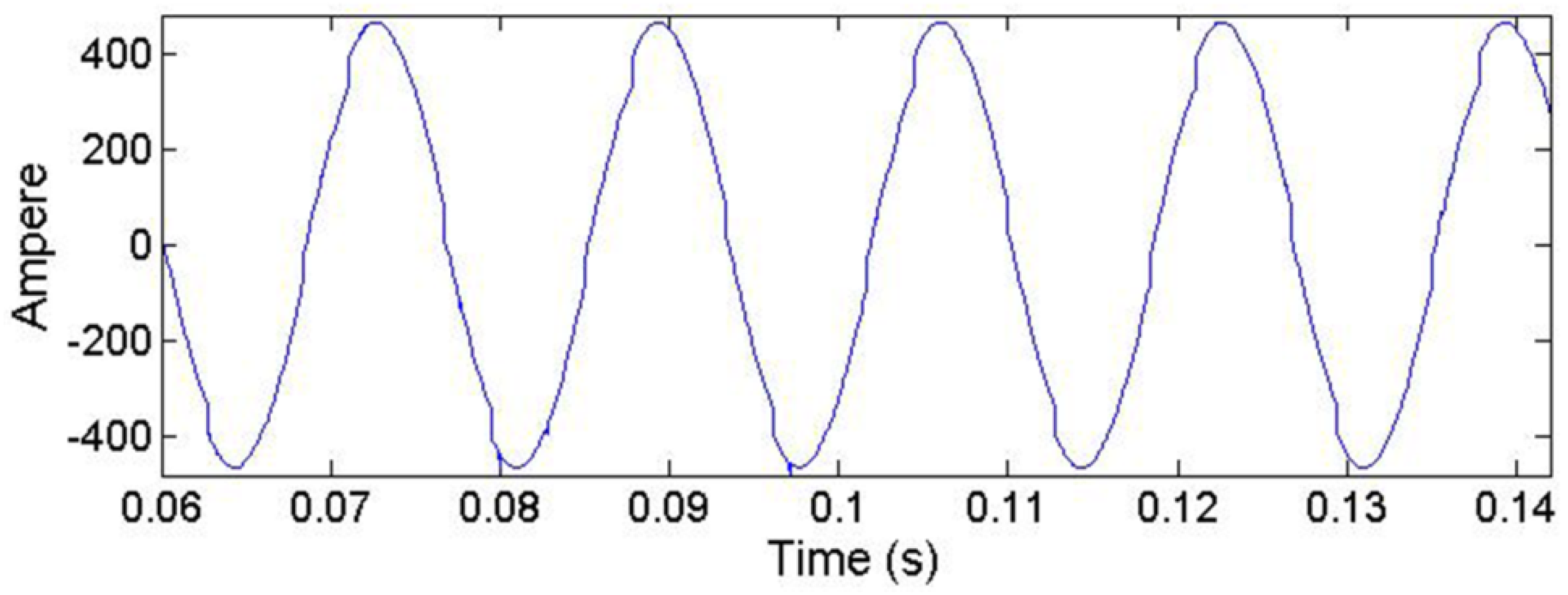
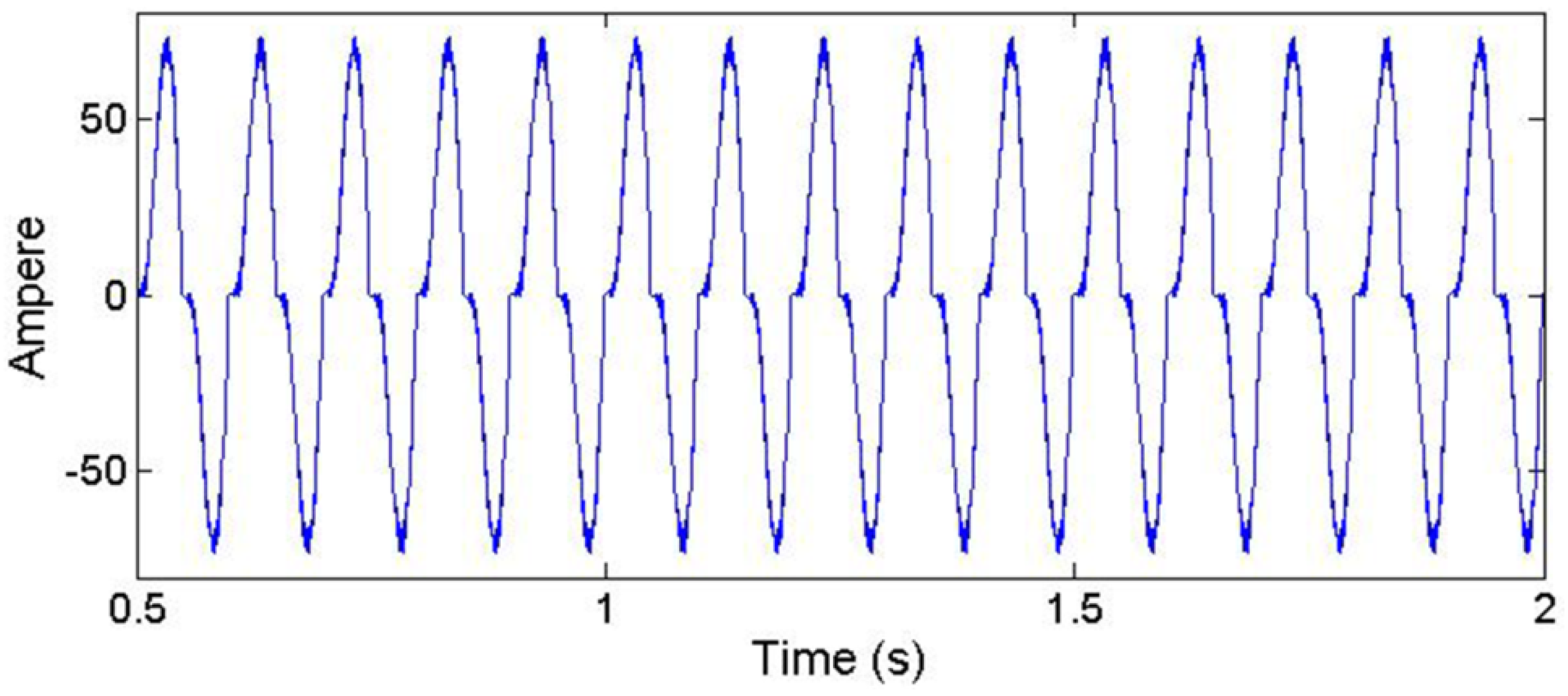
4.2. Signatures of Voltages and Currents
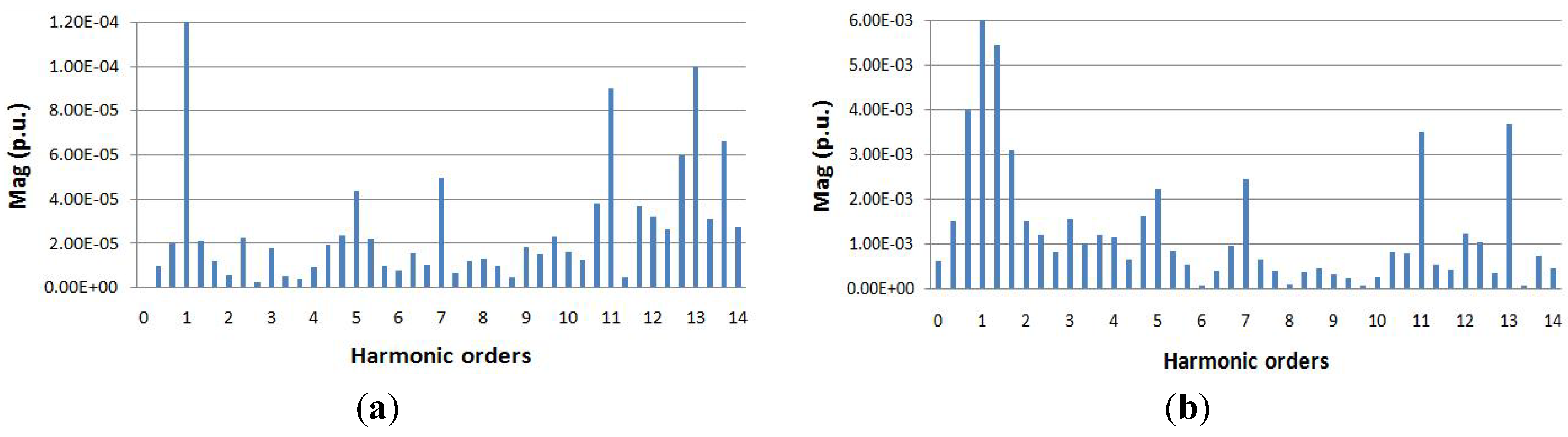
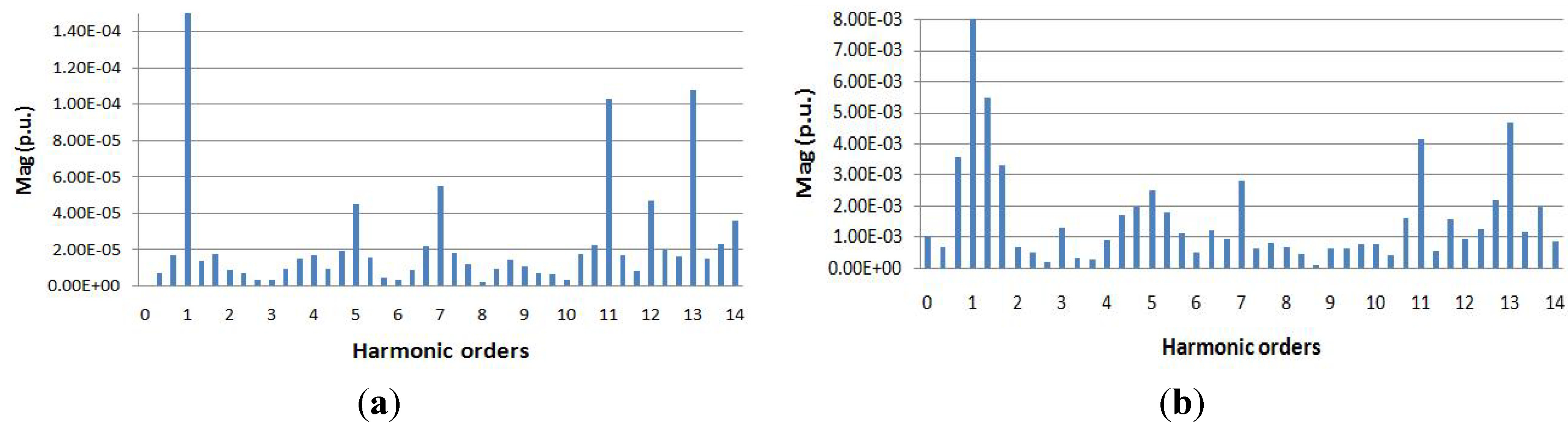
- (1)
- For both voltages and currents, the components of the characteristic harmonic voltages/currents (i.e., 5th, 7th, 11st, 13rd) are larger, compared to non-characteristic (inter-) harmonics.
- (2)
- Many sub-harmonics and DC components of the voltages and currents exist, caused by the cyclo-converter. Some of the sub-harmonics are even larger than those of the characteristic harmonics and inter- harmonics.
- (3)
- Theoretically, for the voltage and current harmonics, the characteristic harmonics of the 11th and 13th orders are smaller than those of 5th and 7th orders. It is found that a minor parallel resonance occurs, near the harmonics of 11th and 13rd orders, in this system.
- (4)
- The patterns of the FFT spectra for both the voltages and currents at different load levels are different. Therefore, the components of the FFT spectra can be used as signatures for load monitoring.


4.3. Comparative Studies for Different c × r Topological Structures

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | c × r | CPU (min:sec) | Accuracy (%) |
|---|---|---|---|
| 1 | 9 × 9 | 2:31 | 87.6 |
| 2 | 12 × 12 | 4:25 | 90.7 |
| 3 | 15 × 15 | 7:34 | 96.9 |
| 4 | 21 × 21 | 15:40 | 98.8 |
| 5 | 22 × 22 | 17:28 | 99.0 |
| 6 | 23 × 23 | 19:03 | 99.2 |
| 7 | 24 × 24 | 20:57 | 99.2 |
4.4. Comparative Studies for Different Signatures
| Cases | Signatures | CPU (min:sec) | Accuracy (%) |
|---|---|---|---|
| 1 | V and I (84 in total) | 13:21 | 95.7 |
| 2 | V (42 in total) | 8:41 | 89.4 |
| 3 | I (42 in total) | 8:21 | 93.8 |
| 4 | P and Q (84 in total) | 10:55 | 98.0 |
| 5 | P (42 in total) | 9:02 | 92.0 |
| 6 | Q (42 in total) | 10:54 | 95.2 |
| 7 | V, I, P and Q (168 in total) | 19:03 | 99.2 |
4.5. Comparative Studies with Traditional Multi-Layer Perceptron
| Methods | CPU time | Accuracy (%) |
|---|---|---|
| The proposed SOFMNN | 20:57 | 99.2 |
| BP-based NN of 20 neurons in hidden layer | 0:39 | 92.9 |
| BP-based NN of 40 neurons in hidden layer | 1:10 | 94.0 |
| BP-based NN of 80 neurons in hidden layer | 2:11 | 95.5 |
| BP-based NN of 110 neurons in hidden layer | 2:50 | 96.5 |
| BP-based NN of 120 neurons in hidden layer | 3:19 | 96.6 |
| GA-based NN [7] | 14:38:00 | 97.8 |
5. Conclusions
Acknowledgments
References
- UNFCCC. Kyoto Protocol to the United Nations Framework Convention on Climate Change; United Nations: Kyoto, Japan, 1997. [Google Scholar]
- IEEE Standards Coordinating Committee. IEEE Application Guide for Interconnecting Distributed Resources with Electric Power Systems, IEEE Standard 1547™; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Hart, G.W. Nonintrusive appliance load monitoring. Proc. IEEE 1992, 80, 1870–1891. [Google Scholar] [CrossRef]
- Leeb, S.B.; Shaw, S.R.; Kirtley, J.L., Jr. Transient event detection in spectral envelope estimates for nonintrusive load monitoring. IEEE Trans. Power Deliv. 1995, 10, 2000–2010. [Google Scholar] [CrossRef]
- Cole, A.; Albicki, A. Nonintrusive identification of electrical loads in a three-phase environment based on harmonic content. In Proceedings of 17th IEEE Instrumentation and Measurement Technology Conference, Baltimore, MD, USA, 1–4 May 2000; pp. 24–29.
- Cox, R.; Leeb, S.B.; Shaw, S.R.; Norford, L.K. Transient event detection for nonintrusive load monitoring and demand side management using voltage distortion. In Proceedings of 21st IEEE PES Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 19–23 March 2006; pp. 1751–1757.
- Chang, H.H.; Yang, H.T. Apply a nonintrusive energy management system to economic dispatch for cogeneration system and power utility. Appl. Energy 2009, 86, 2335–2343. [Google Scholar] [CrossRef]
- Bose, N.K.; Liang, P. Neural Network Fundamentals with Graphs, Algorithms, and Applications; McGraw-Hill Inc.: New York, NY, USA, 1996. [Google Scholar]
- Hong, Y.Y.; Chang, H.L.; Chiu, C.S. Wind power forecasting using simultaneous perturbation stochastic approximation (SPSA) algorithm and neural network with fuzzy inputs. Energy 2010, 35, 3870–3876. [Google Scholar] [CrossRef]
- Zhou, D.Q.; Annakkage, U.D.; Rajapakse, A.D. Online monitoring of voltage stability margin using an artificial neural network. IEEE Trans. Power Syst. 2010, 25, 1566–1574. [Google Scholar] [CrossRef]
- Gutierrez-Martinez, V.J.; Cañizares, C.A.; Fuerte-Esquivel, C.R.; Pizano-Martinez, A.; Gu, X.P. Neural-network security-boundary constrained optimal power flow. IEEE Trans. Power Syst. 2011, 26, 63–72. [Google Scholar] [CrossRef]
- Mehraeen, S.; Jagannathan, S.; Crow, M.L. Power system stabilization using adaptive neural network-based dynamic surface control. IEEE Trans. Power Syst. 2011, 26, 669–680. [Google Scholar] [CrossRef]
- Kim, J.Y.; Kim, H.M.; Kim, S.K.; Jeon, J.H.; Choi, H.K. Designing an energy storage system fuzzy PID controller for microgrid islanded operation. Energies 2011, 4, 1443–1460. [Google Scholar] [CrossRef]
- Xiao, Z.; Li, T.H.; Huang, M.; Shi, J.H.; Yang, J.J.; Yu, J.; Wu, W. Hierarchical MAS based control strategy for microgrid. Energies 2010, 3, 1622–1638. [Google Scholar] [CrossRef]
- Papadimitriou, C.N.; Vovos, N.A. Transient response improvement of microgrids exploiting the inertia of a doubly-fed induction generator (DFIG). Energies 2010, 3, 1049–1066. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Eto, J.H.; Schenkman, B.; Stevens, J.; Vollkommer, H.; Klapp, D.; Linton, E.; Hurtado, H.; Roy, J. CERTS microgrid laboratory test bed. IEEE Trans. Power Deliv. 2011, 26, 325–332. [Google Scholar] [CrossRef]
- Pelly, B.R. Thyristor Phase-Controlled Converters and Cycloconverters: Operation, Control, and Performance; Wiley-Interscience: New York, NY, USA, 1971. [Google Scholar]
Appendix
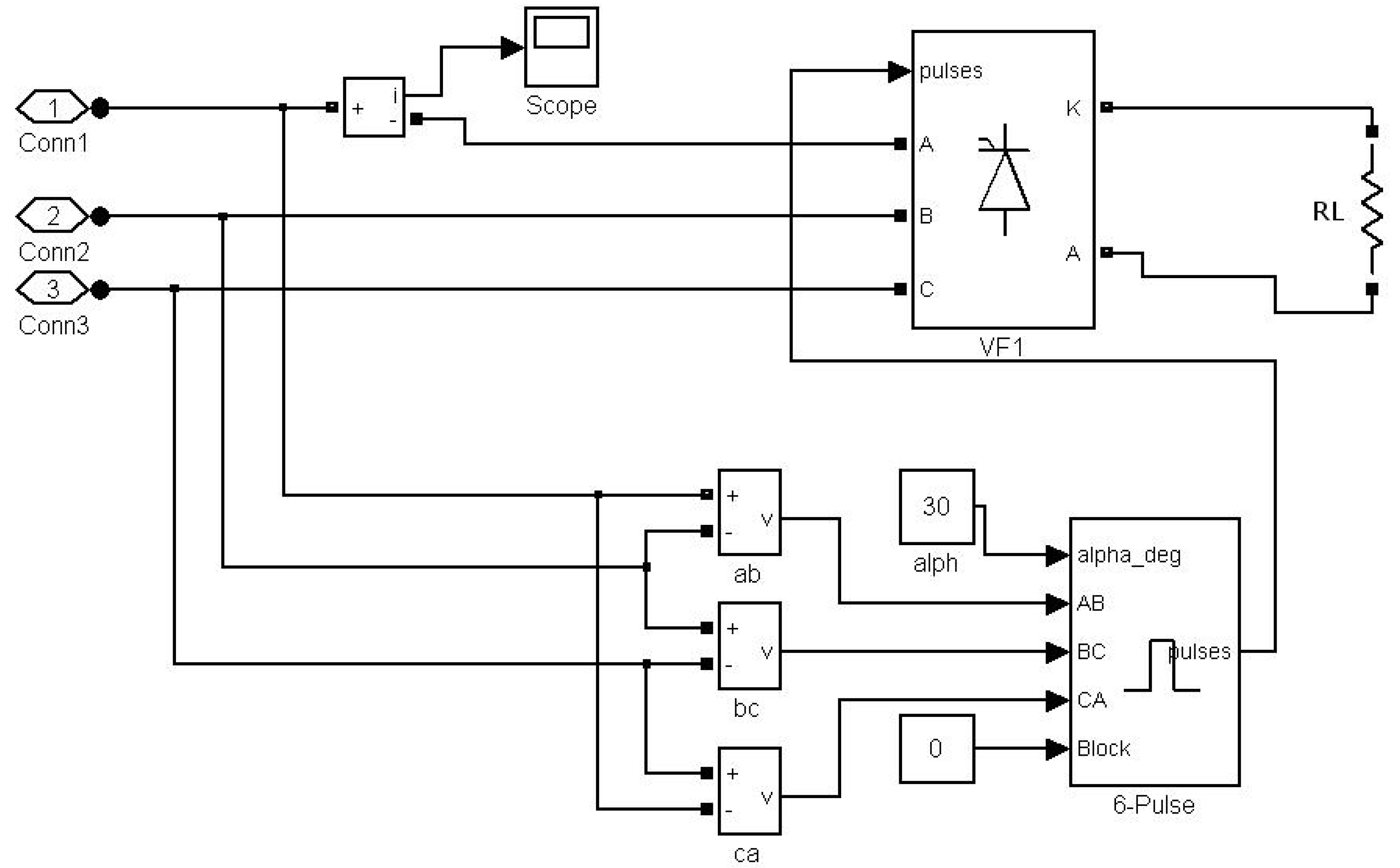
A1. Rectifier

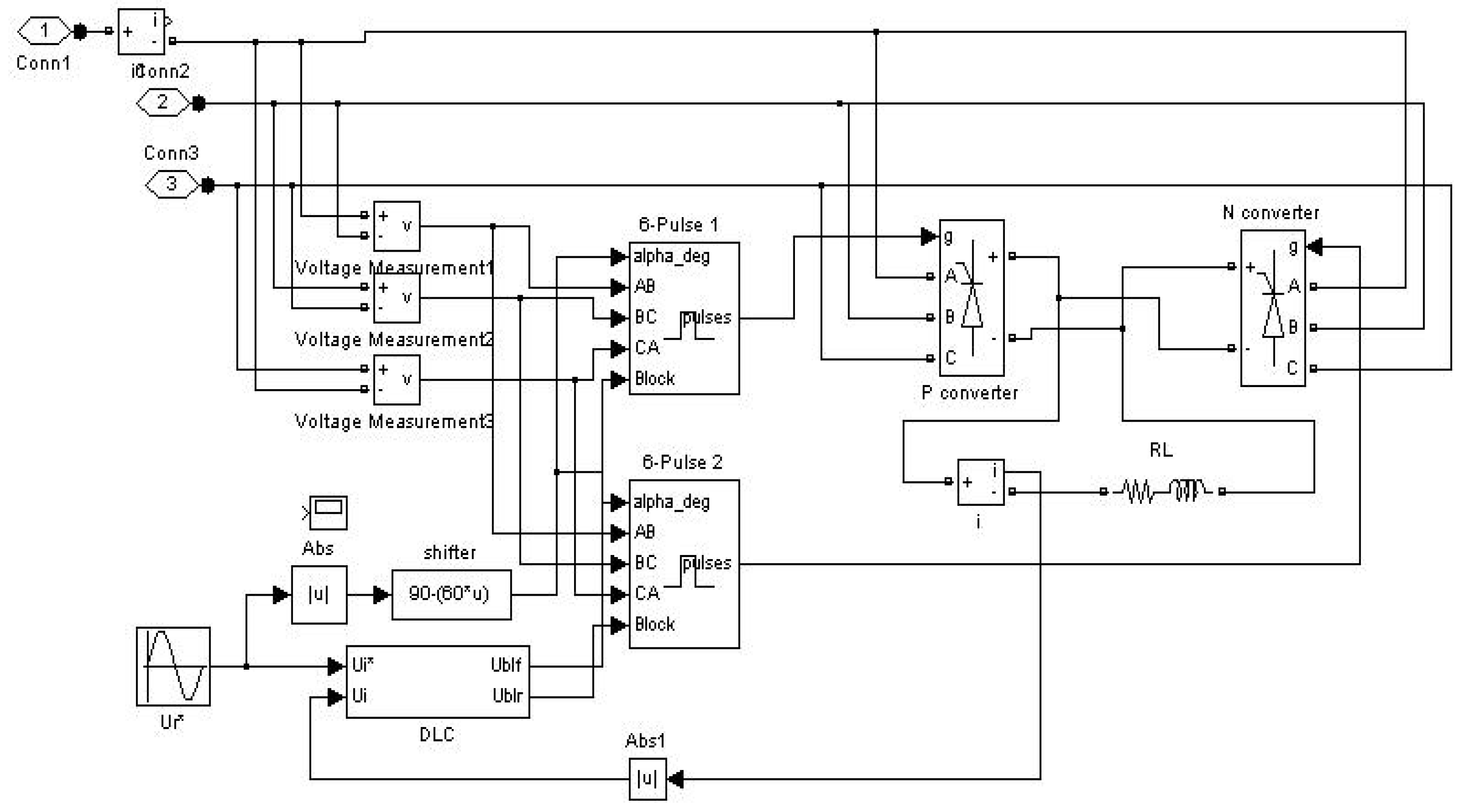
A2. Cyclo-Converter

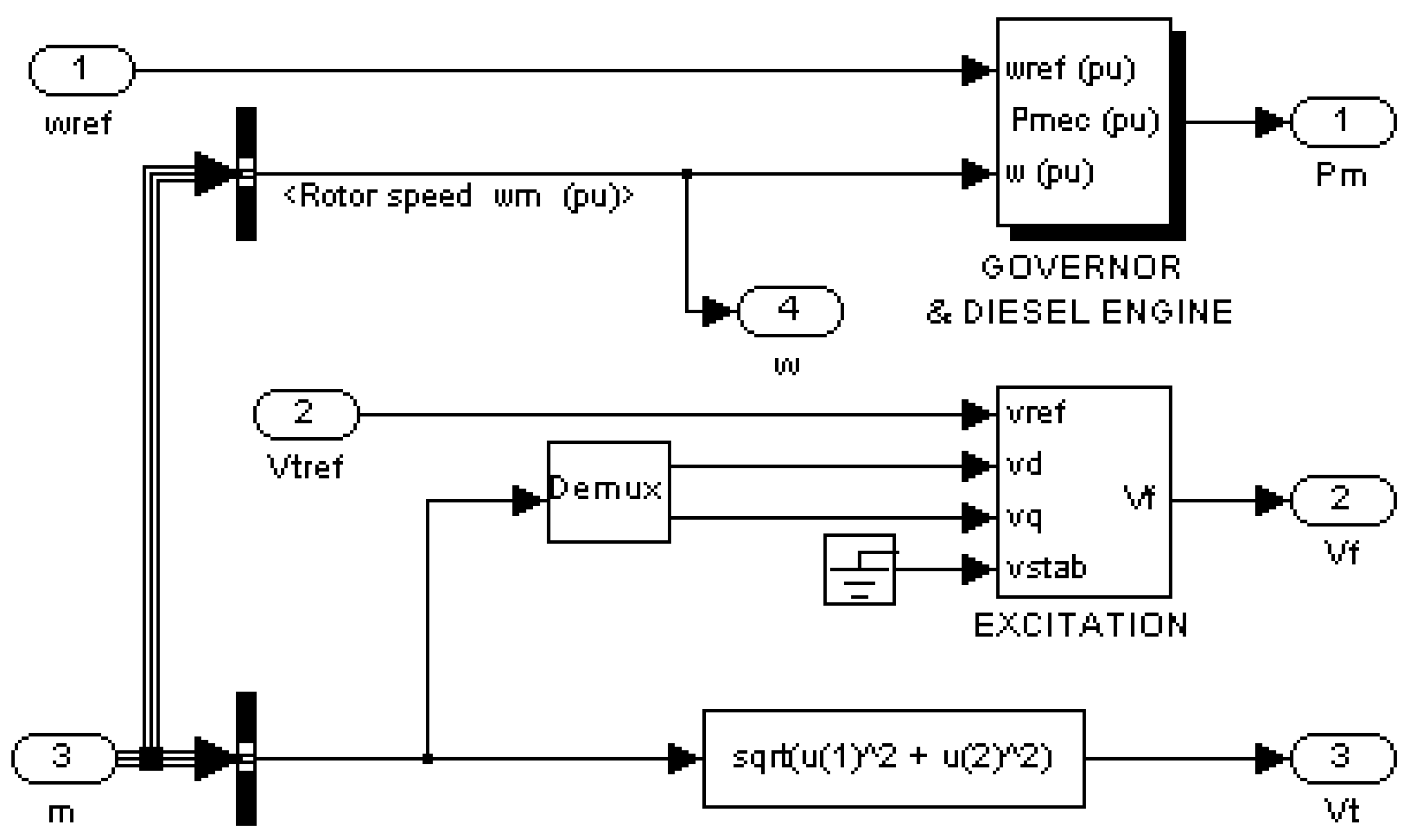
A3. Diesel Generator

A4. Wind-Turbine Generator
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hong, Y.-Y.; Chou, J.-H. Nonintrusive Energy Monitoring for Microgrids Using Hybrid Self-Organizing Feature-Mapping Networks. Energies 2012, 5, 2578-2593. https://doi.org/10.3390/en5072578
Hong Y-Y, Chou J-H. Nonintrusive Energy Monitoring for Microgrids Using Hybrid Self-Organizing Feature-Mapping Networks. Energies. 2012; 5(7):2578-2593. https://doi.org/10.3390/en5072578
Chicago/Turabian StyleHong, Ying-Yi, and Jing-Han Chou. 2012. "Nonintrusive Energy Monitoring for Microgrids Using Hybrid Self-Organizing Feature-Mapping Networks" Energies 5, no. 7: 2578-2593. https://doi.org/10.3390/en5072578
APA StyleHong, Y. -Y., & Chou, J. -H. (2012). Nonintrusive Energy Monitoring for Microgrids Using Hybrid Self-Organizing Feature-Mapping Networks. Energies, 5(7), 2578-2593. https://doi.org/10.3390/en5072578