A Practical Protection Coordination Strategy Applied to Secondary and Facility Microgrids


Abstract
:1. Introduction
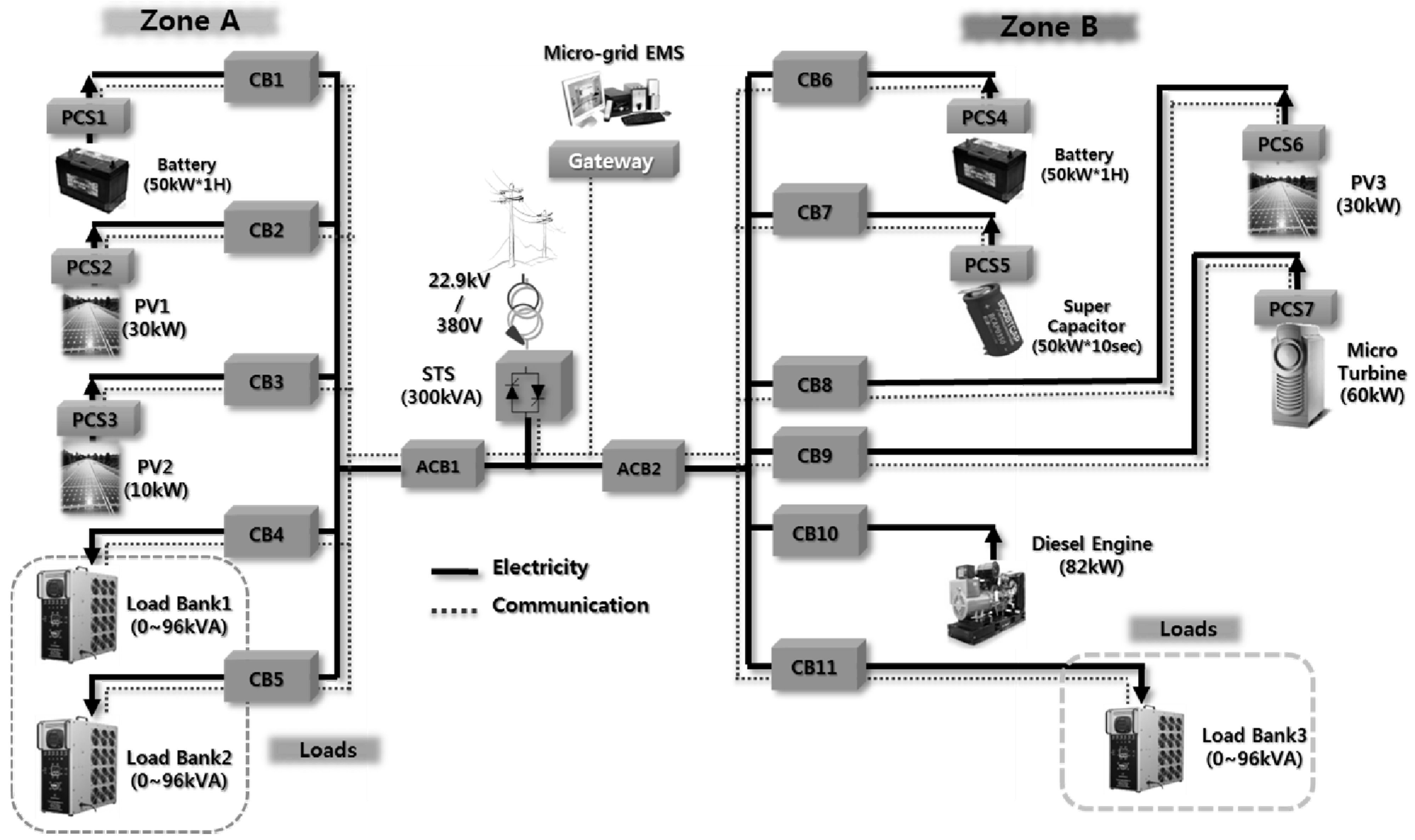
2. System Configuration
2.1. Components of the Demonstration Site at KEPCO RI

2.2. Control Methods of BESS and SC


3. Proposition of Protection Coordination Algorithm in Microgrid
3.1. Basic Concept for Protection Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence Elements | Three line-to-ground fault | Line-to-line fault | Single line-to-ground fault |
|---|---|---|---|
| V1 | Yes | Yes | Yes |
| V2 | Yes | Yes | Yes |
| V0 | No | No | Yes |
| I1 | Yes | Yes | Yes |
| I2 | Yes | Yes | Yes |
| I0 | No | No | Yes |
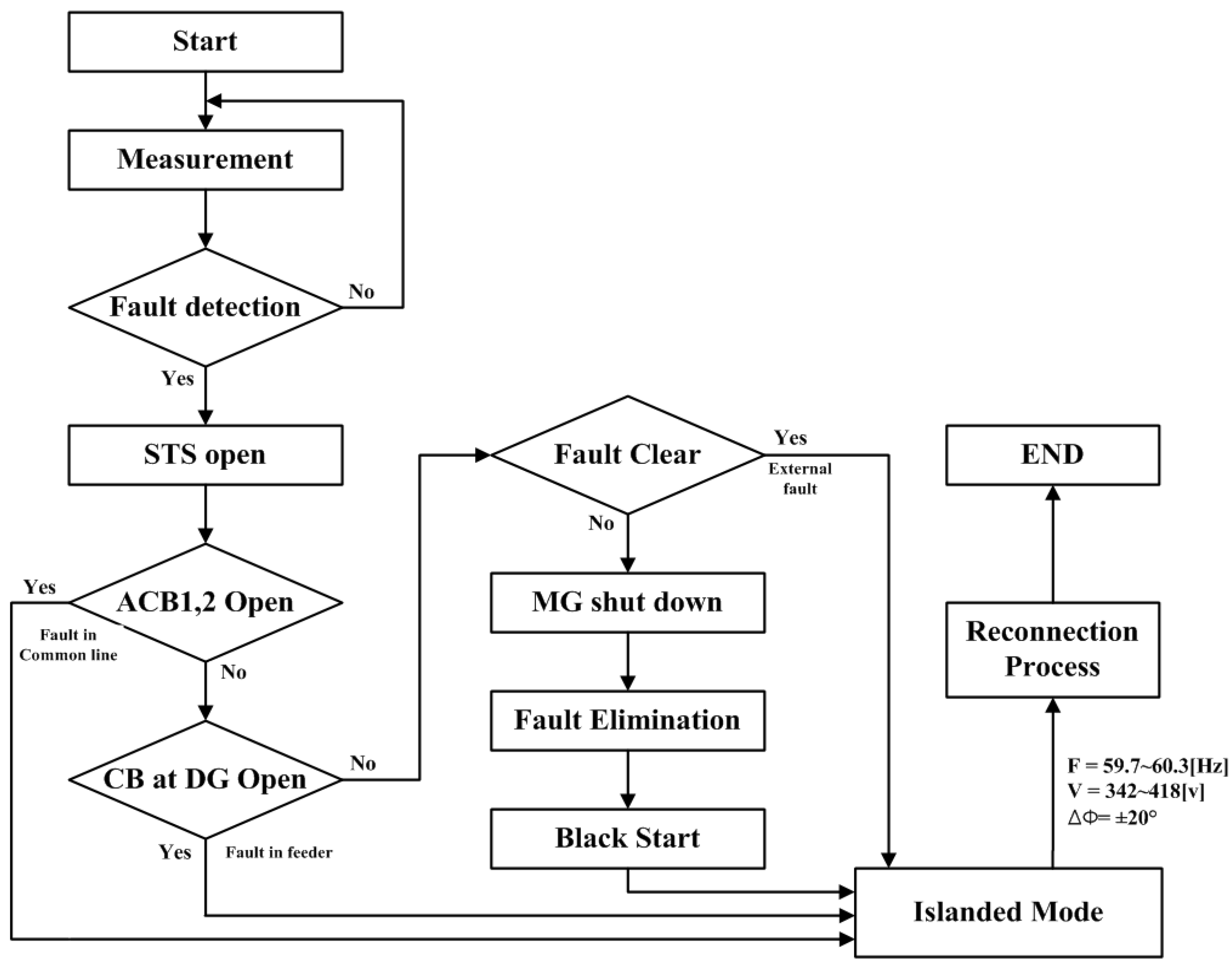
3.2. Protection Algorithm for a Facility Microgrid (Zone B)

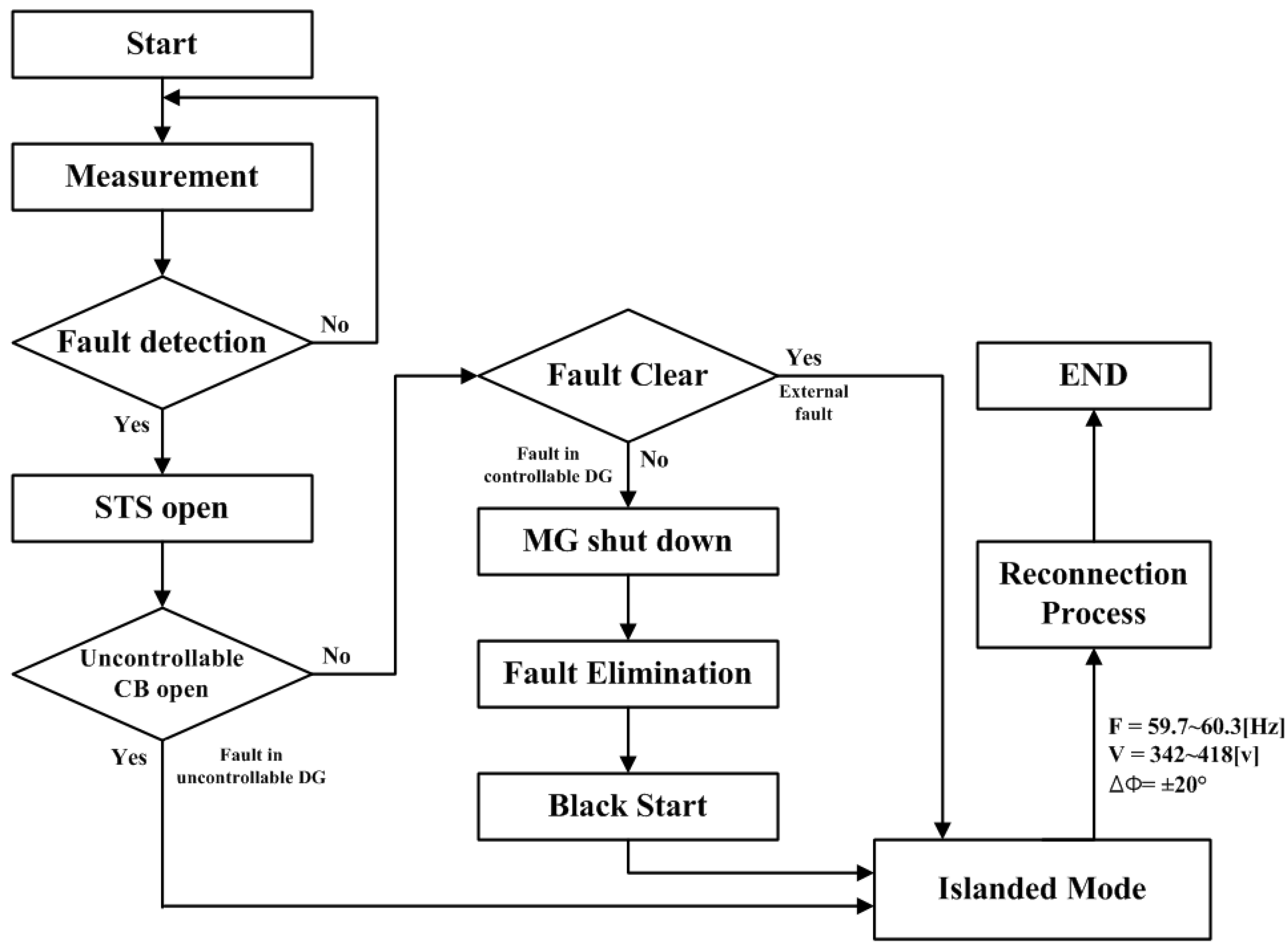
3.3. Protection Algorithm for a Secondary Microgrid (Zones A and B)

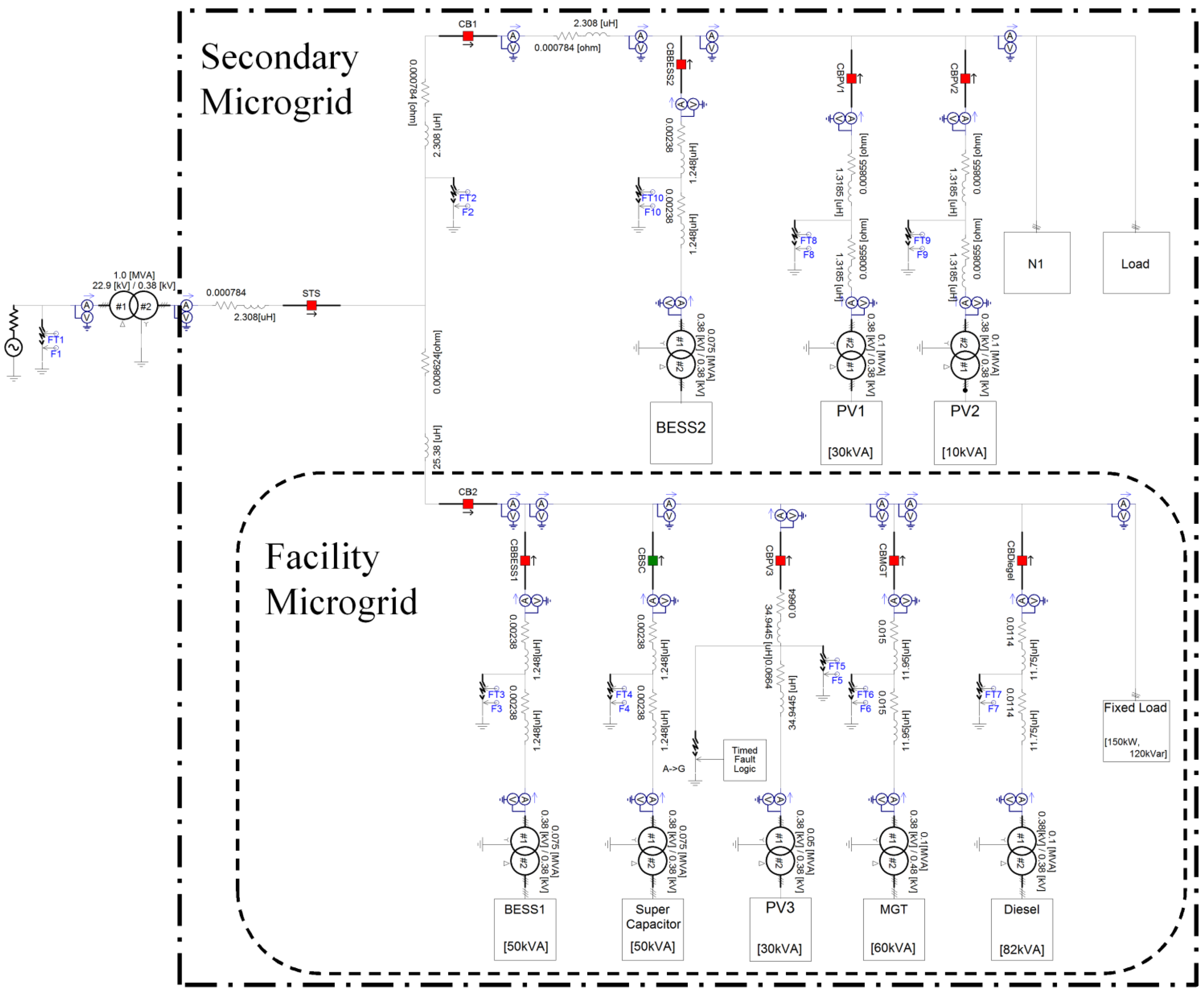
4. Simulation Results and Discussions
4.1. Simulation Scenarios

| Algorithm | Case | Fault Location |
|---|---|---|
| Protection Algorithm for Facility Microgrid (Zone B) | 1 | External Fault |
| 2 | Feeder Fault with BESS in Zone B | |
| 3 | Feeder Fault with PV in Zone B | |
| Protection Algorithm for Secondary Microgrid (Zones A and B) | 4 | External Fault |
| 5 | Feeder Fault with BESS in Zone B | |
| 6 | Feeder Fault with PV in Zone A | |
| Comparison of Relay Setting | 7 | Common Line Fault with Relay Setting: 2.0 ~ 3.0 pu |
| 8 | Common Line Fault with Relay Setting: 1.0 ~ 1.1 pu | |
| 9 | Common Line Fault with Relay Setting: 7.0 ~ 8.0 pu |
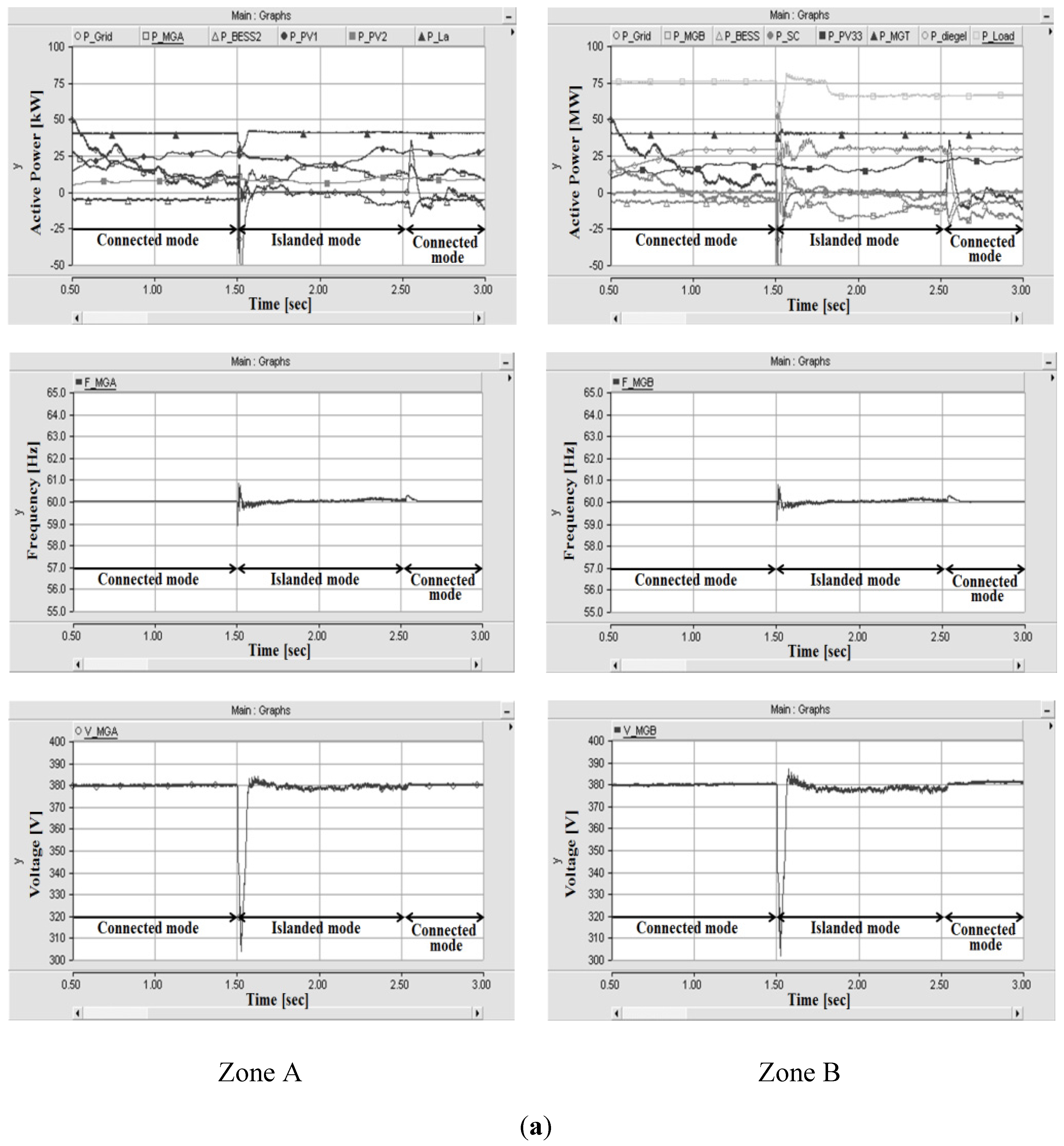
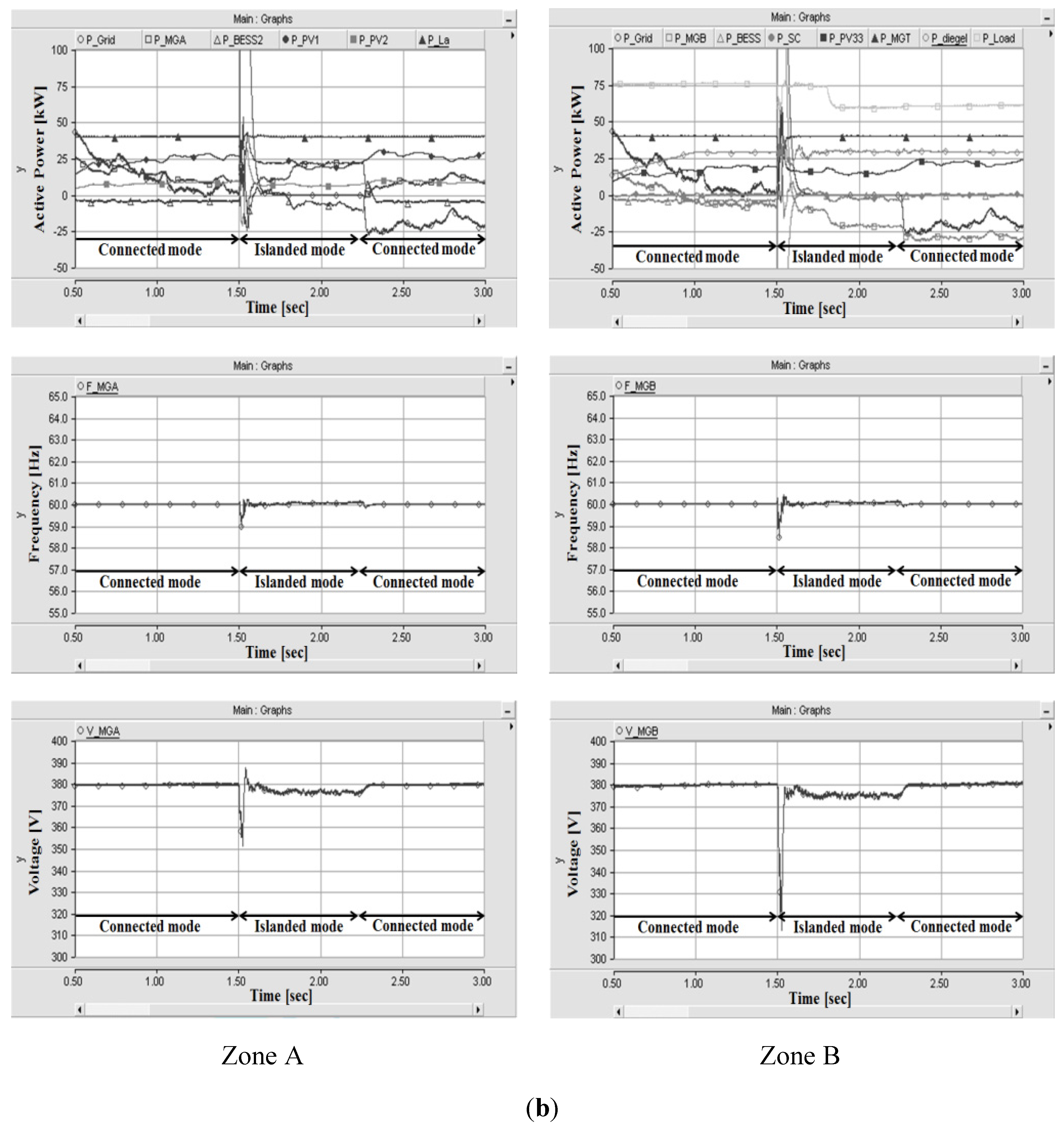
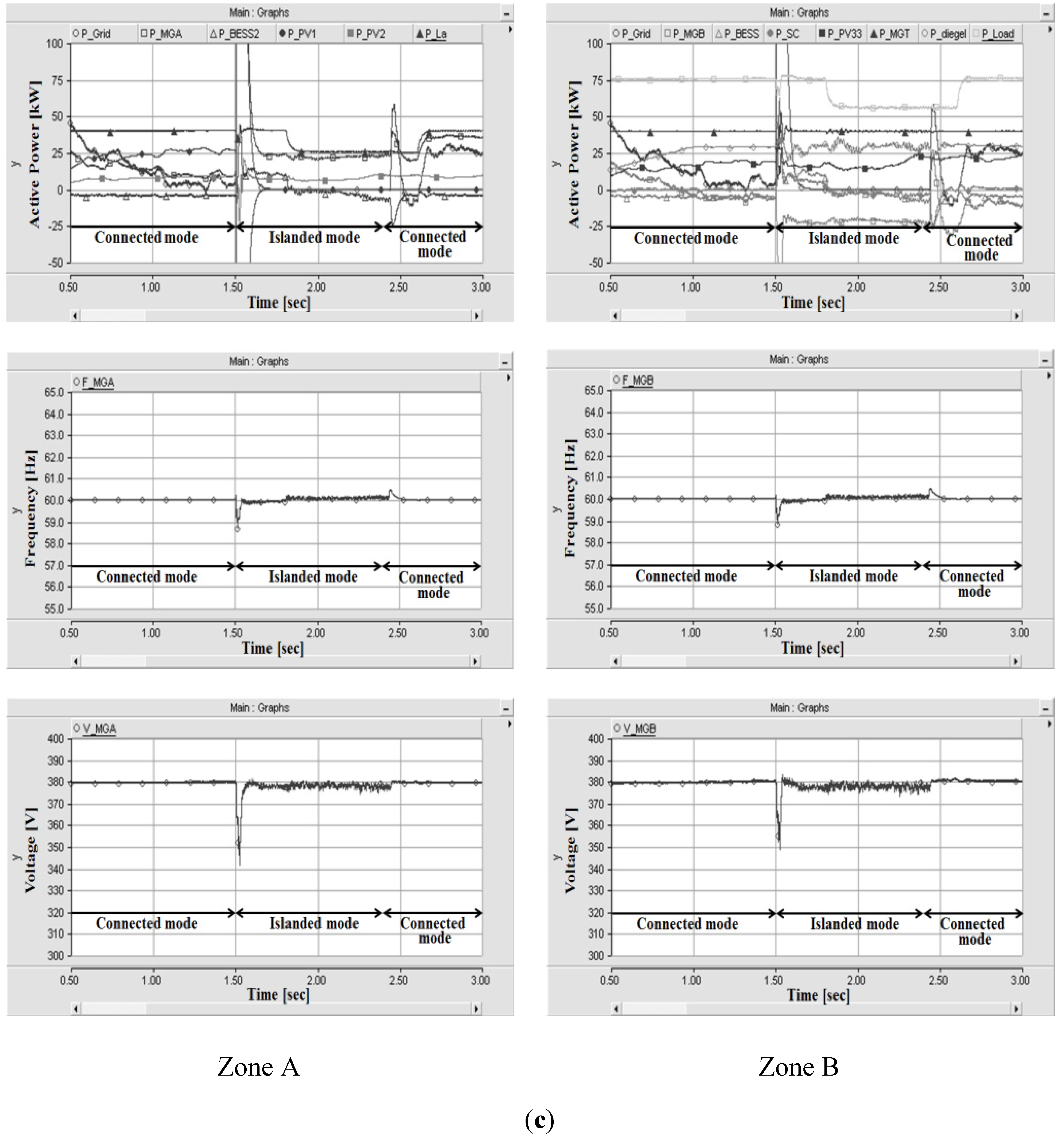
4.2. Simulation Results







5. Conclusions
Acknowledgements
References
- Brucoli, M.; Green, T.C.; McDonald, J.F.D. Modelling and analysis of fault behaviour of inverter microgrids to aid future detection. In Proceedings of 2007 IEEE International Conference on System of Systems Engineering (SoSE ’07), San Antonio, TX, USA, 16–18 April 2007; IEEE: New York, NY, USA, 2007; pp. 1–6. [Google Scholar]
- Lasseter, R.H. MicroGrids. In Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; IEEE: New York, NY, USA, 2002; Volume 1, pp. 305–308. [Google Scholar]
- Jayawarna, N.; Jenkins, N.; Barnes, M.; Lorentzou, M.; Papthanassiou, S.; Hatziaguriou, N. Safety analysis of a microgrid. In Proceedings of 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005; IEEE: New York, NY, USA, 2005; pp. 1–7. [Google Scholar]
- Nikkhajoei, H.; Lasseter, R.H. Microgrid protection. In Proceedings of 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; IEEE: New York, NY, USA, 2007; pp. 1–6. [Google Scholar]
- European Technology SmartGrid Platform. Vision and strategy for European Electricity Networks of the Future; European Commission: Brussels, Belgium, 2006. Available online: http://www.smartgridinformation.info/pdf/4578_doc_1.pdf (accessed on 20 August 2011).
- Hatziargyriou, N.; Asano, A.; Iravani, R.; Marnay, C. Microgirds. IEEE Power Energy Mag. 2007, 4, 78–94. [Google Scholar] [CrossRef]
- Kroposki, B.; Lasseter, R.; Ise, T.; Morozumi, S.; Papathanassiou, S.; Hatziargyriou, N. Making microgrids work. IEEE Power Energy Mag. 2008, 3, 40–53. [Google Scholar] [CrossRef]
- Laaksonen, H.J. Protection principles for future Microgrids. IEEE Trans. Power Electron. 2010, 12, 2910–2918. [Google Scholar] [CrossRef]
- Alexandre, O.; Antonio, F.; Thomas, D.; Boris, V.; Christian, H.; Jose, M.Y.; Rachel, L.; Nick, J.; Bieshoy, A.; Frank, V.O.; Nickos, H.; Maria, L. Novel Protection Systems for Microgrids (Final Report); Project Consortium, EU: Fuengirola, Spain, 2009. [Google Scholar]
- The Institute of Electrical and Electronics Engineers, Inc. IEEE Guide for Design, Operation, and Integration of Distributed Resource Island Systems with Electric Power Systems; IEEE: New York, NY, USA, 2011. Available online: http://standards.ieee.org/findstds/standard/1547.4-2011.html (accessed on 10 January 2012).
- Kirkham, H.; Das, R. Effect of voltage control in utility interactive dispersed storage and generation systems. IEEE Trans. Power Appar. Syst. 1984, 8, 2277–2282. [Google Scholar] [CrossRef]
- Doyle, M.T. Reviewing the impacts of distributed generation on distribution system protection. In Proceedings of 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 25 July 2002; IEEE: New York, NY, USA, 2002; Volume 1, pp. 103–105. [Google Scholar]
- Kauhaniemi, K.; Kumpulainen, L. Impact of distributed generation on the protection of distribution networks. In Proceedings of the Eighth IEE International Conference on Development in Power System Protection, Amsterdam, The Netherlands, 5–8 April 2004; IEEE: New York, NY, USA, 2004; Volume 1, pp. 315–318. [Google Scholar]
- Slootweg, J.G.; Kling, W.L. Impacts of distributed generation on power system transient stability. In Proceedings of 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 25 July 2002; IEEE: New York, NY, USA, 2002; Volume 2, pp. 862–867. [Google Scholar]
- Jung, W.U.; Lee, H.J.; Kwon, S.C.; Chae, W.K. Application of directional over current protection schemes considering the fault characteristics in the distribution system with dispersed generation [in Korean]. Korean Inst. Illum. Electr. Install. Eng. 2010, 9, 97–107. [Google Scholar]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jin, D.-G.; Choi, J.-C.; Won, D.-J.; Lee, H.-J.; Chae, W.-K.; Park, J.-S. A Practical Protection Coordination Strategy Applied to Secondary and Facility Microgrids. Energies 2012, 5, 3248-3265. https://doi.org/10.3390/en5093248
Jin D-G, Choi J-C, Won D-J, Lee H-J, Chae W-K, Park J-S. A Practical Protection Coordination Strategy Applied to Secondary and Facility Microgrids. Energies. 2012; 5(9):3248-3265. https://doi.org/10.3390/en5093248
Chicago/Turabian StyleJin, Dae-Geun, Jong-Chan Choi, Dong-Jun Won, Hak-Ju Lee, Woo-Kyu Chae, and Jung-Sung Park. 2012. "A Practical Protection Coordination Strategy Applied to Secondary and Facility Microgrids" Energies 5, no. 9: 3248-3265. https://doi.org/10.3390/en5093248
APA StyleJin, D.-G., Choi, J.-C., Won, D.-J., Lee, H.-J., Chae, W.-K., & Park, J.-S. (2012). A Practical Protection Coordination Strategy Applied to Secondary and Facility Microgrids. Energies, 5(9), 3248-3265. https://doi.org/10.3390/en5093248