A Combined Cooperative Braking Model with a Predictive Control Strategy in an Electric Vehicle


Abstract
:1. Introduction
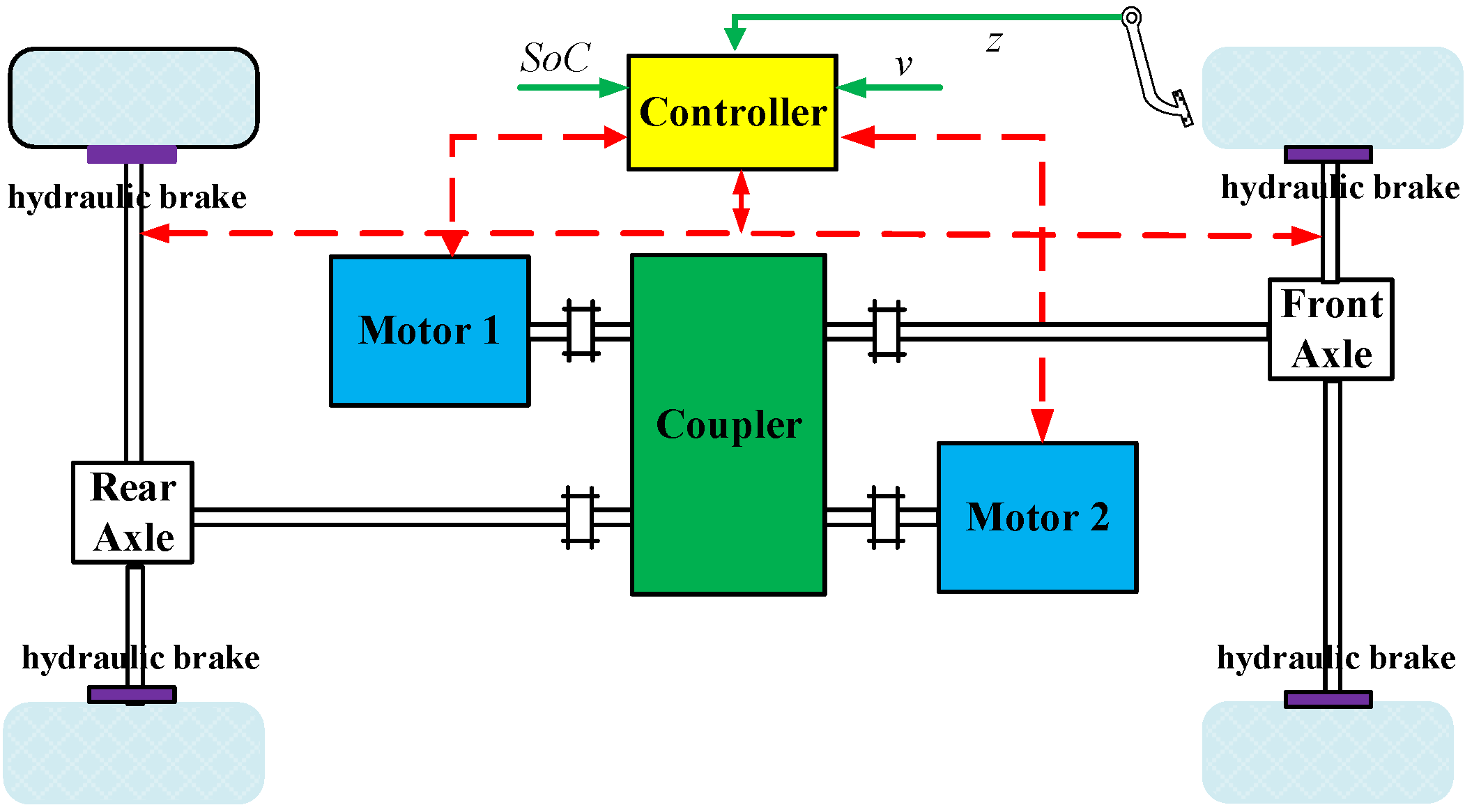
2. Cooperative Braking System in an EV

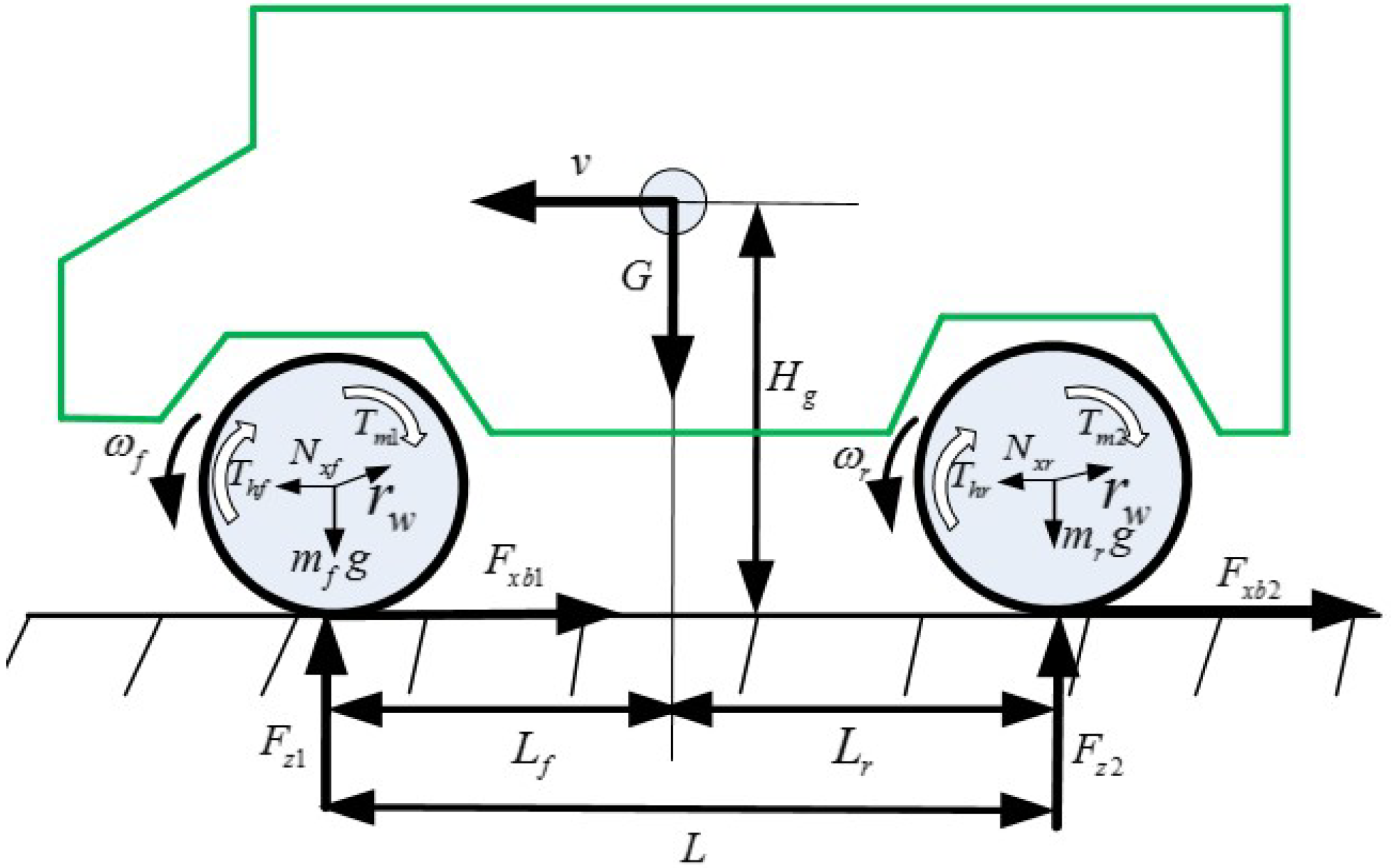
3. Cooperative Braking Mathematic Models
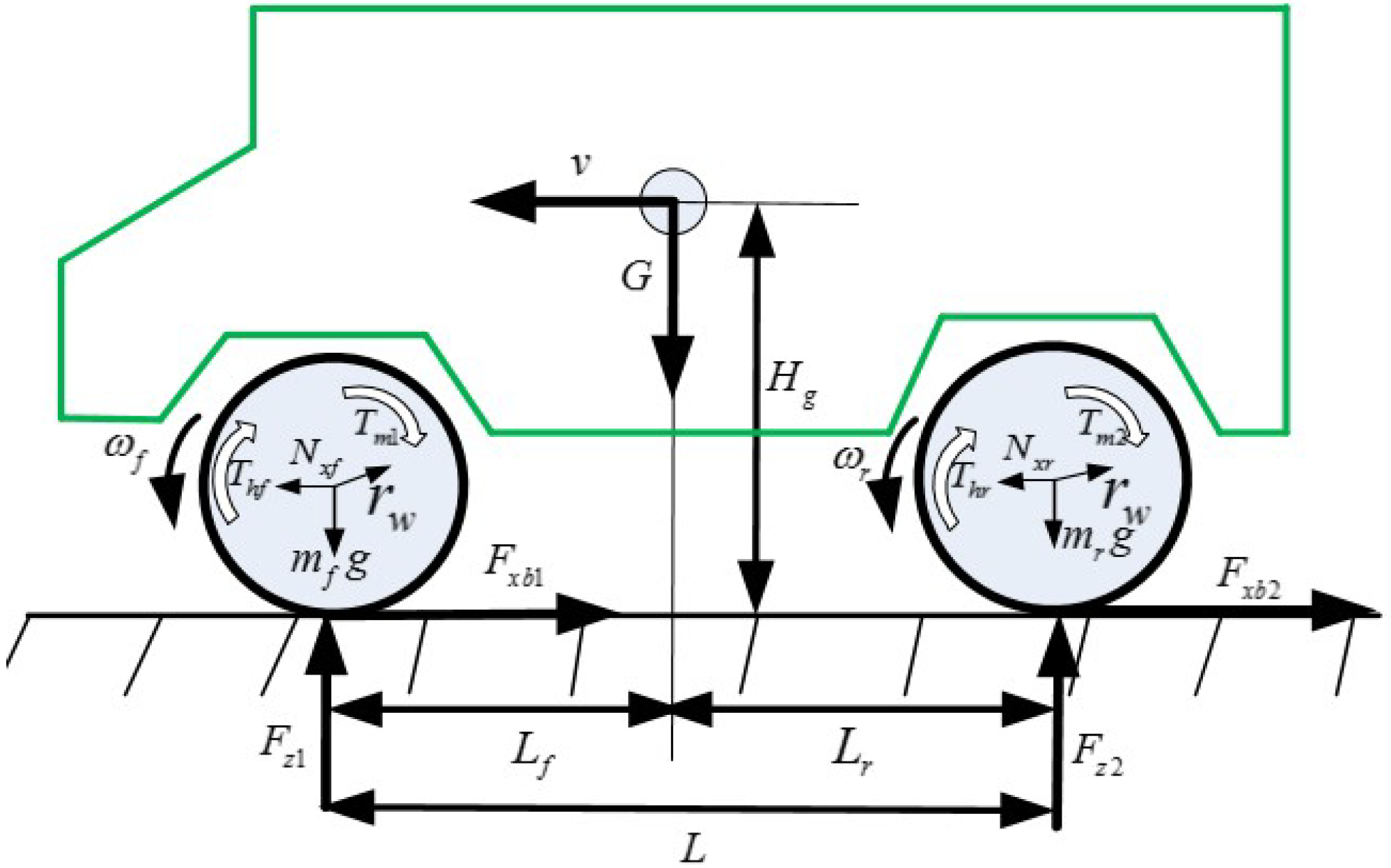
3.1. General Cooperative Braking Mathematic Models
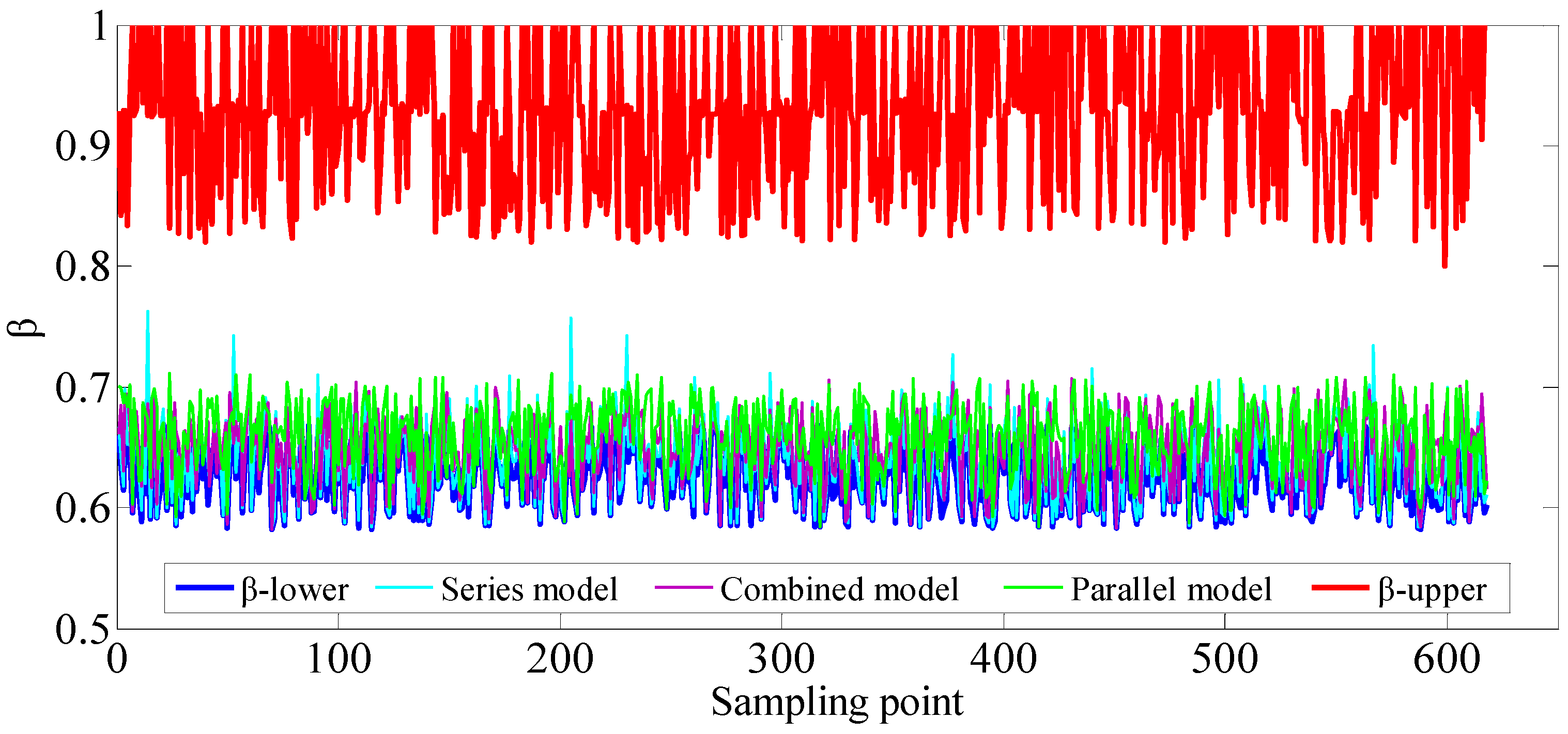
3.1.1. The Series Model
3.1.2. The Parallel Model
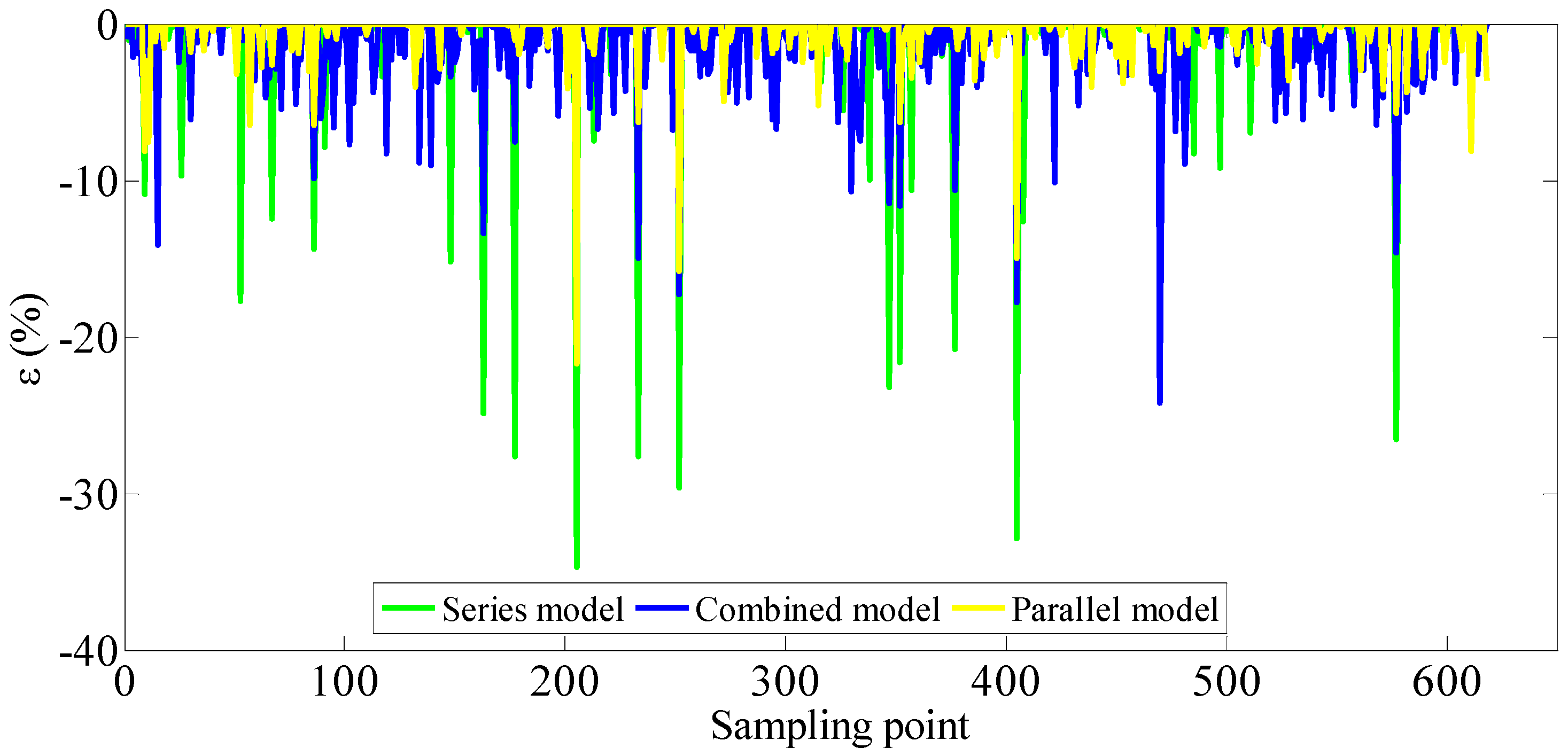
3.1.3. The Combined Model
3.2. Optimization Cooperative Braking Mathematic Models
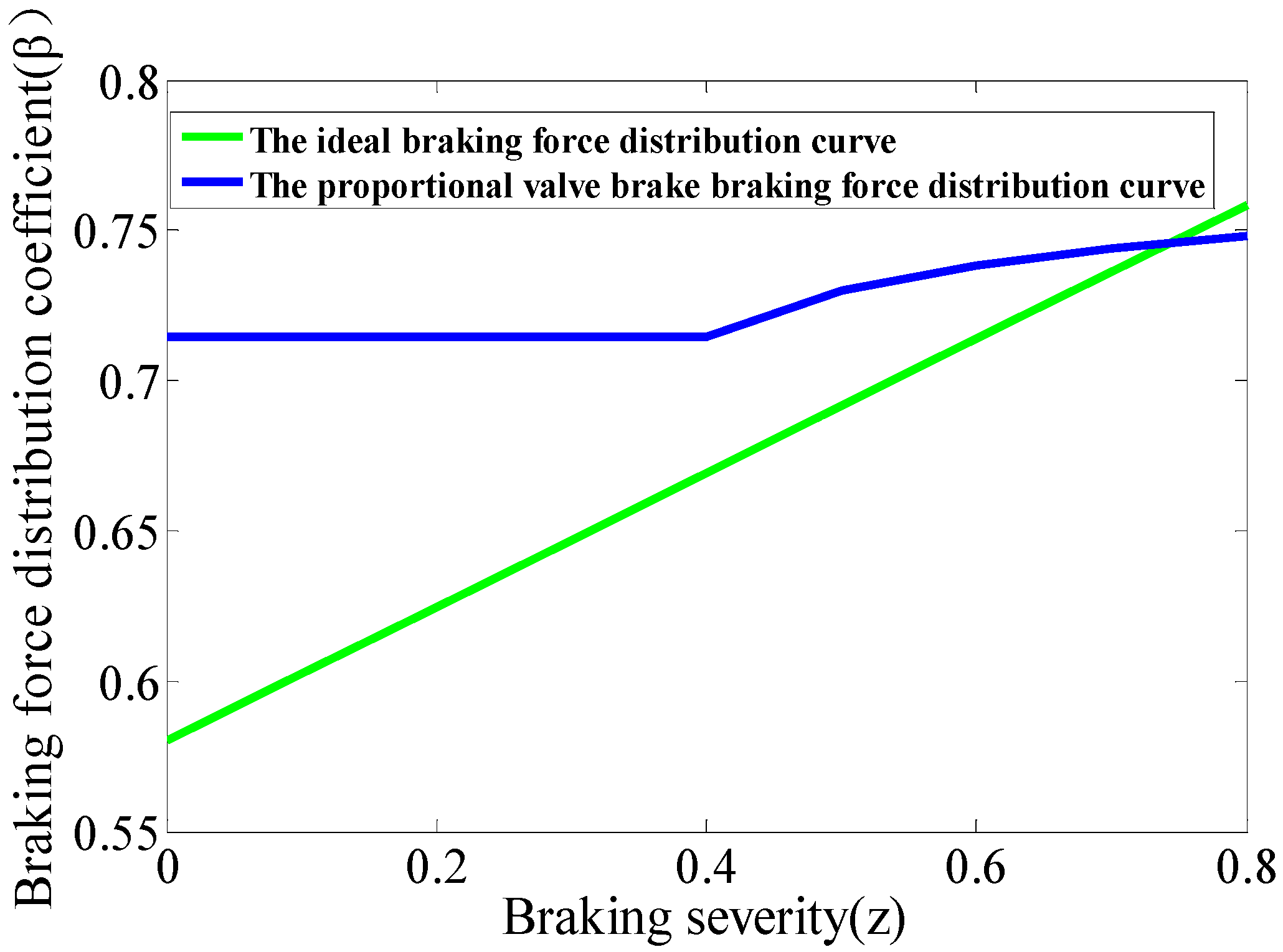
3.2.1. The Ideal Regenerative Energy Recovery Efficiency Objective
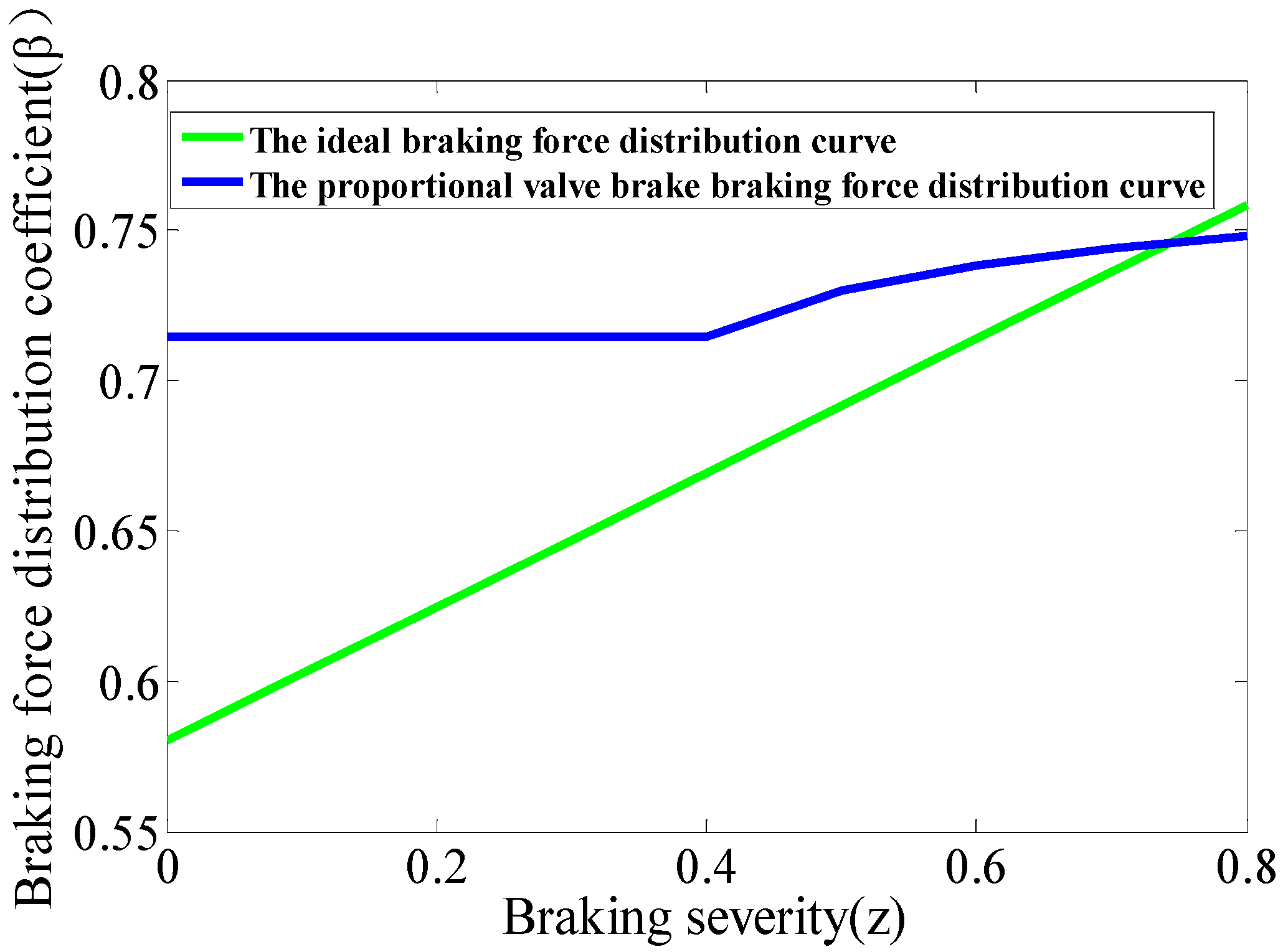
3.2.2. The Ideal Braking Stability Objective
3.3. Boundary Conditions
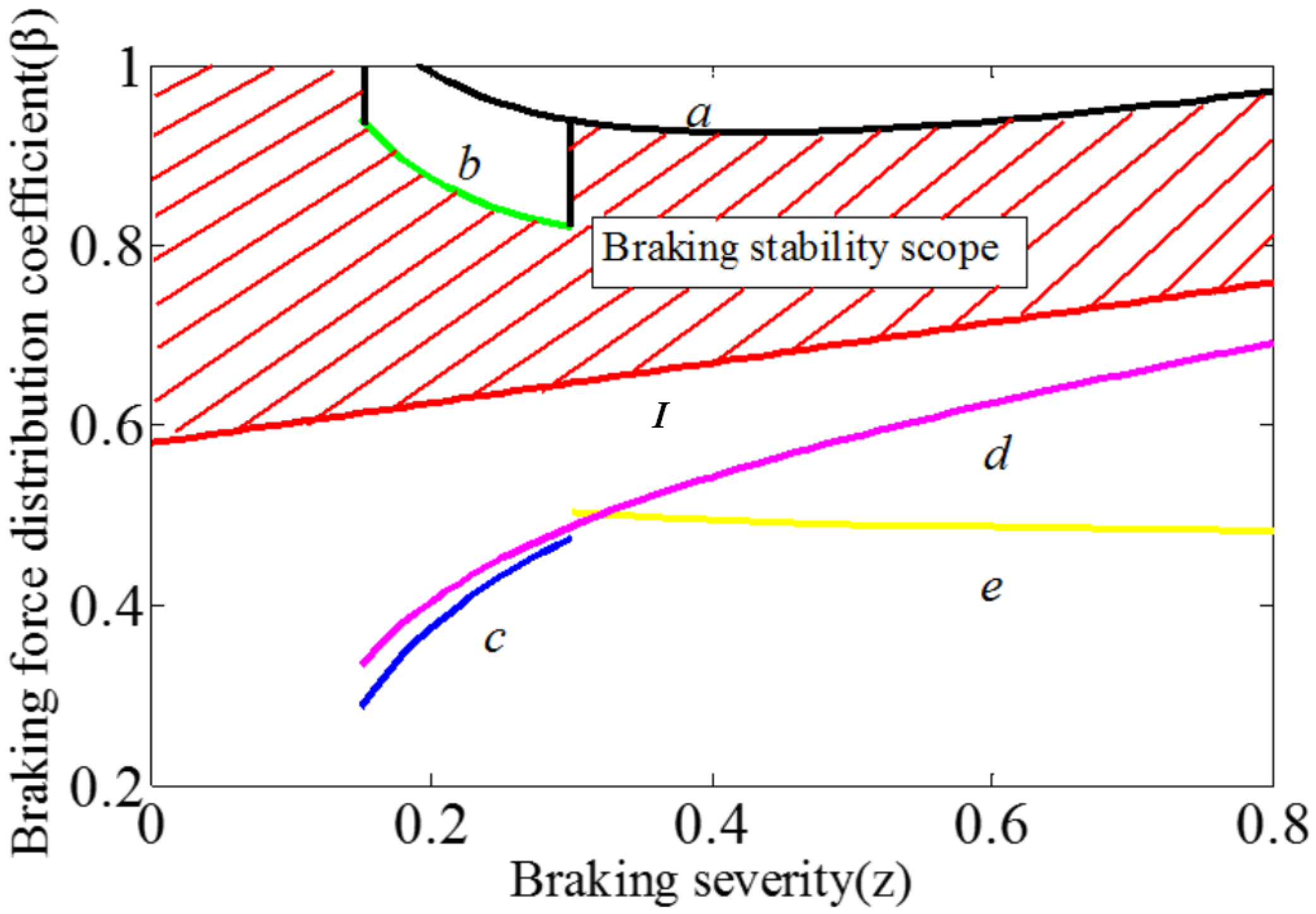
3.3.1. Regenerative Braking Stability Scope Constraints
3.3.2. Constraints According to the Mathematic Models
3.3.3. Other Constraints
- (1)
- The total regenerative braking torque should be lower than the ideal regenerative braking torque which means: Tm ≤ Topt.
- (2)
- For each motor, the regenerative braking torque should be lower than the maximum braking torque of each motor under a given motor speed, which means: Tm1 ≤ Tout1 and Tm2 ≤ Tout2.
- (3)
- The total braking torque of the wheels should be lower than the maximum road braking torque:
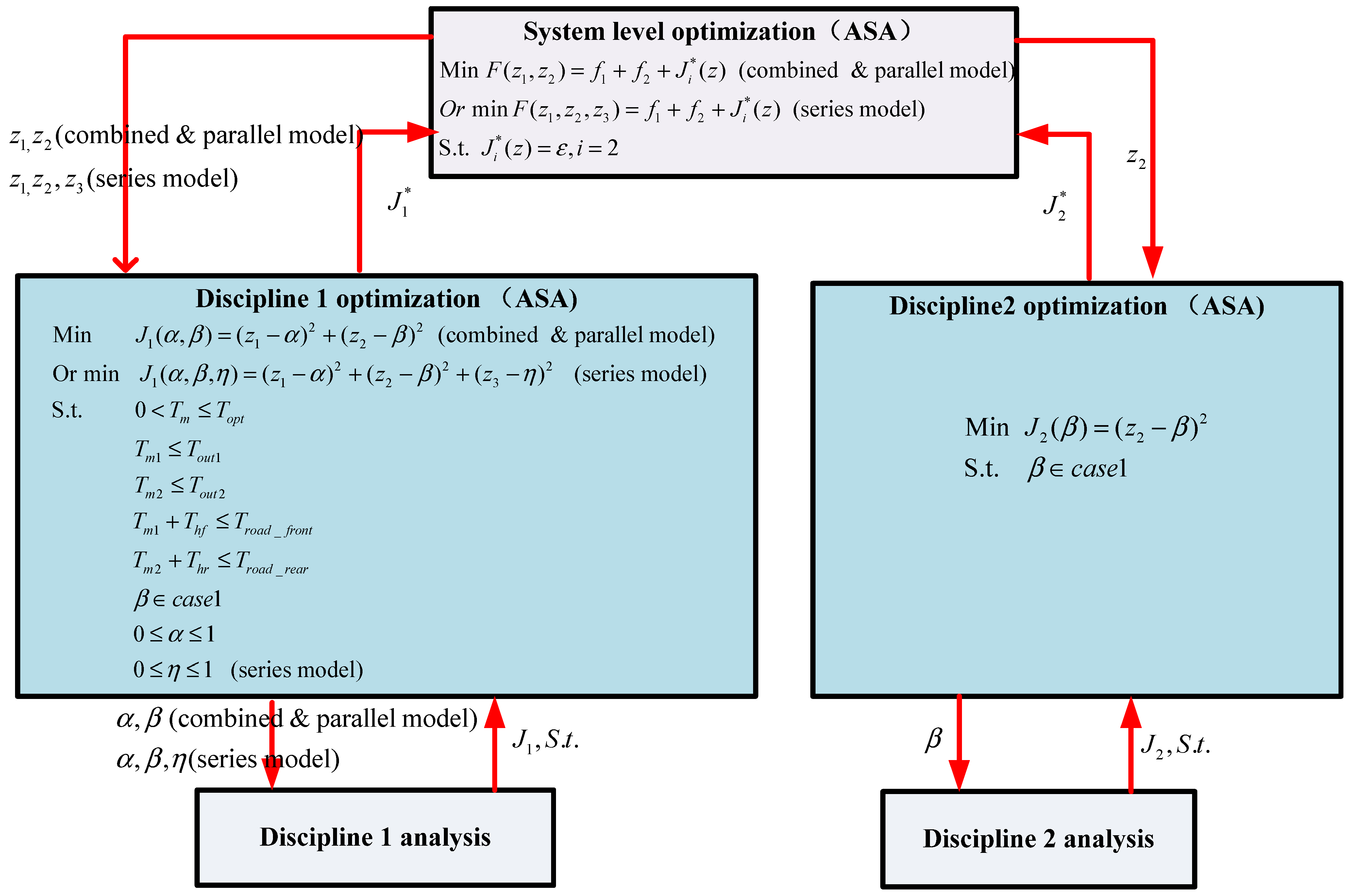
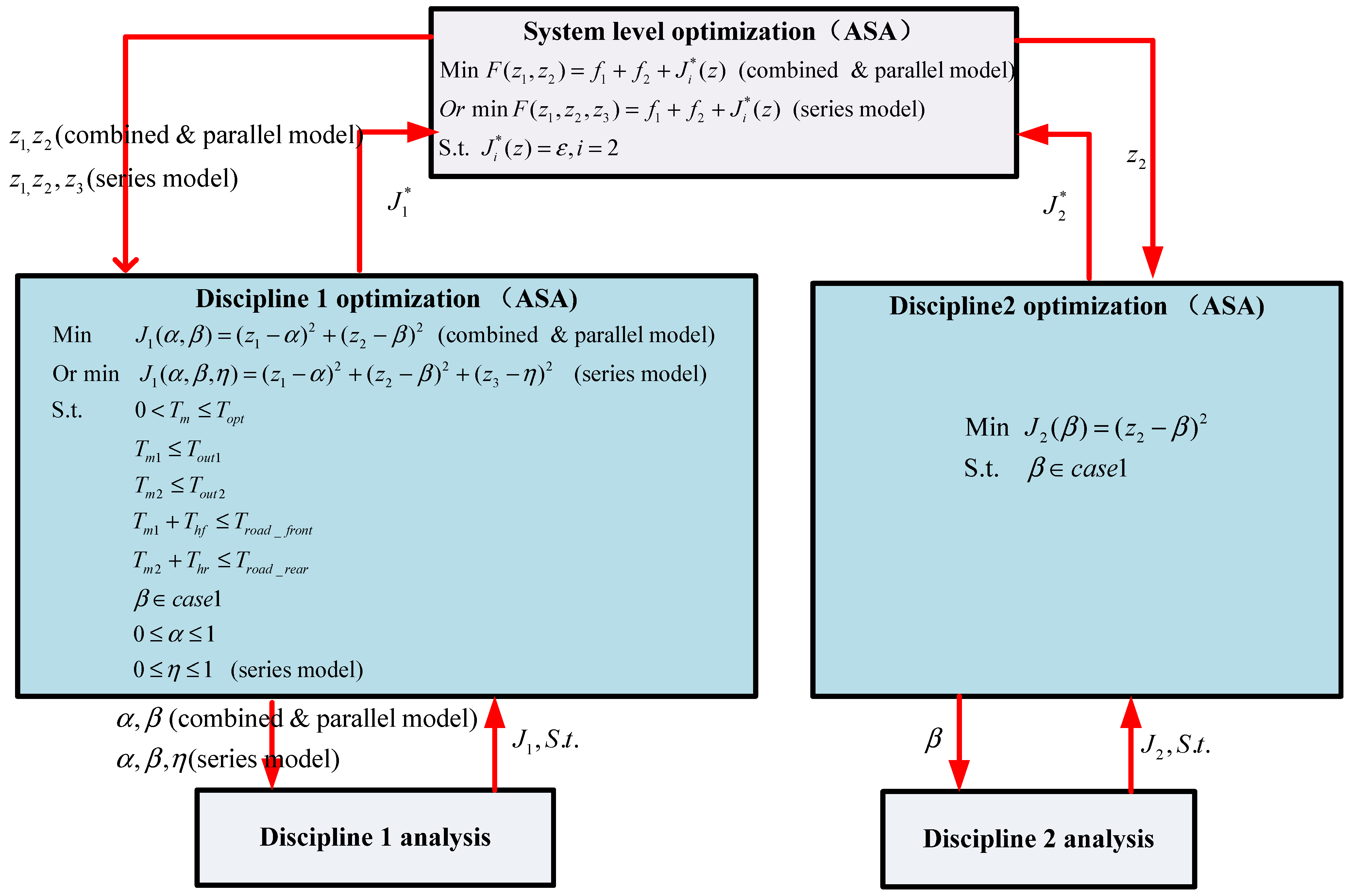
3.3.4. Two Disciplines of the Cooperative Braking System
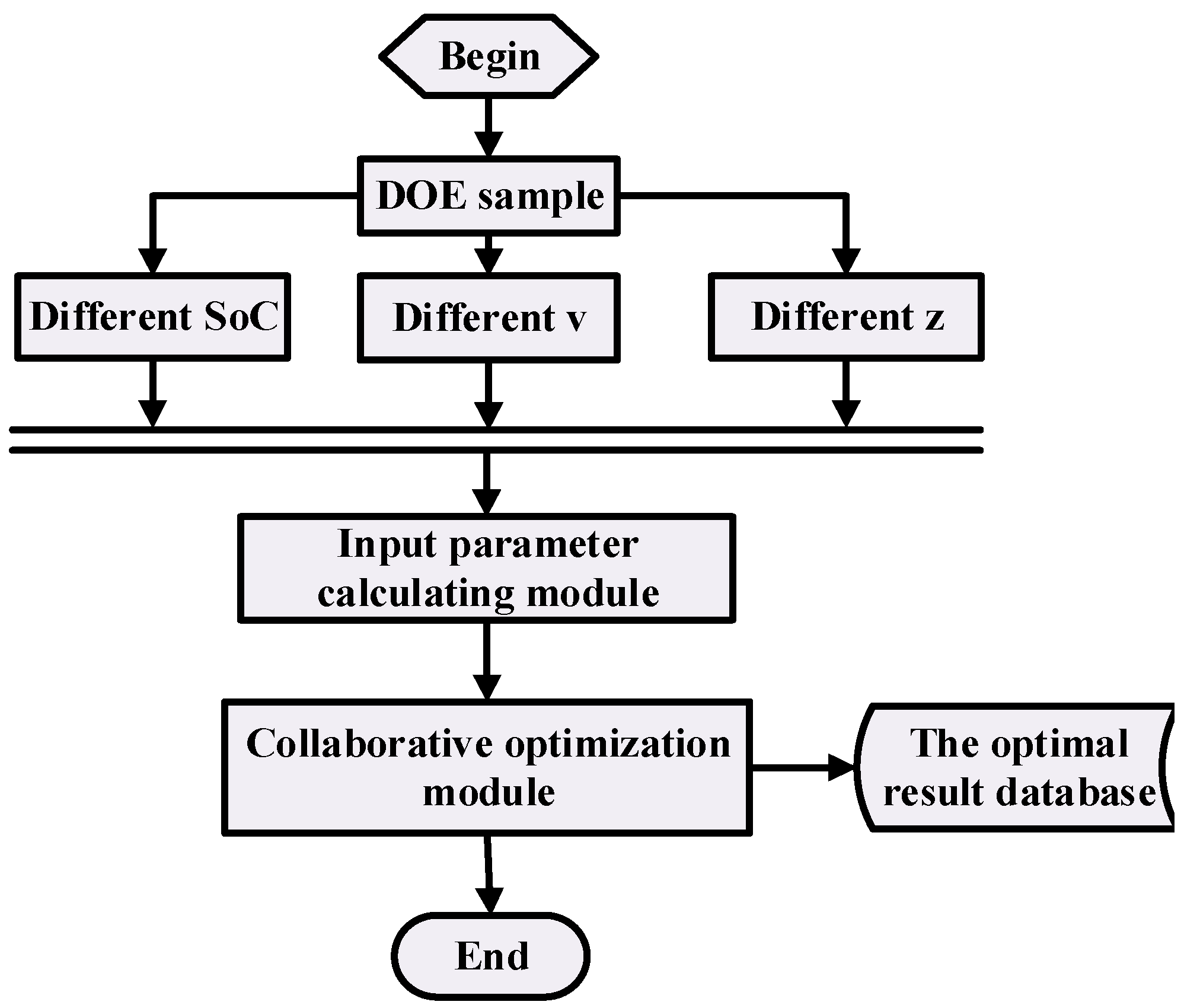
3.3.5. Collaborative Optimization Algorithm
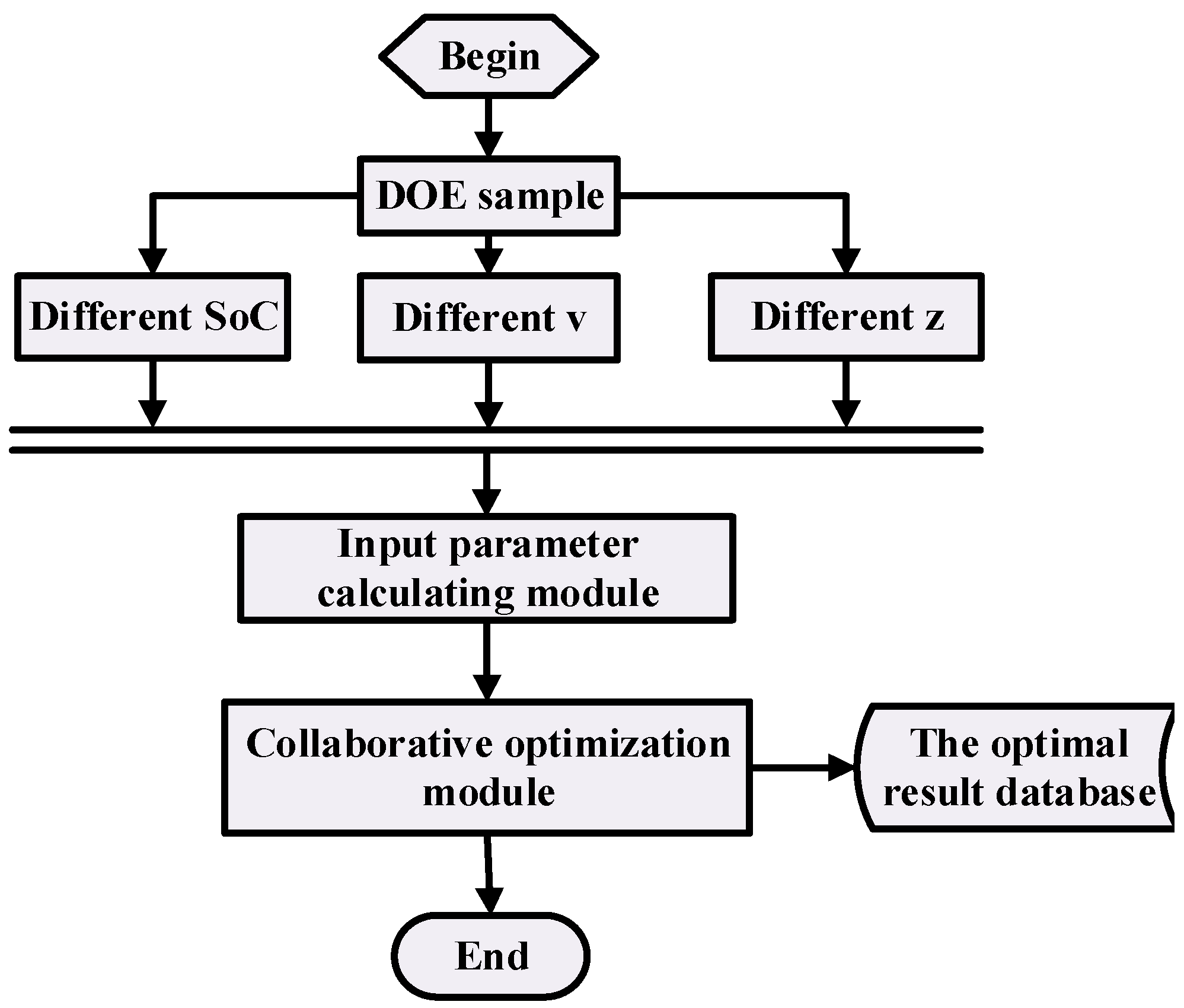
3.4. Off-Line Process Optimization Design
3.4.1. Discrete Design Space

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling points | SoC | v (km/h) | z |
|---|---|---|---|
| 1 | 0.35526 | 89.51 | 0.35862 |
| 2 | 0.23754 | 47.868 | 0.24502 |
| 3 | 0.51622 | 98.318 | 0.15679 |
| 4 | 0.5967 | 62.362 | 0.3512 |
| · | · | · | · |
| · | · | · | · |
| · | · | · | · |
| 617 | 0.58468 | 95.115 | 0.07207 |
| 618 | 0.35706 | 88.468 | 0.10057 |
| 619 | 0.55766 | 47.708 | 0.28874 |
3.4.2. Off-Line Process Optimization Stream
4. Optimization Results and Discussion
5. Predictive Control Model and Dynamic Simulation Results
5.1. Predictive Control Model

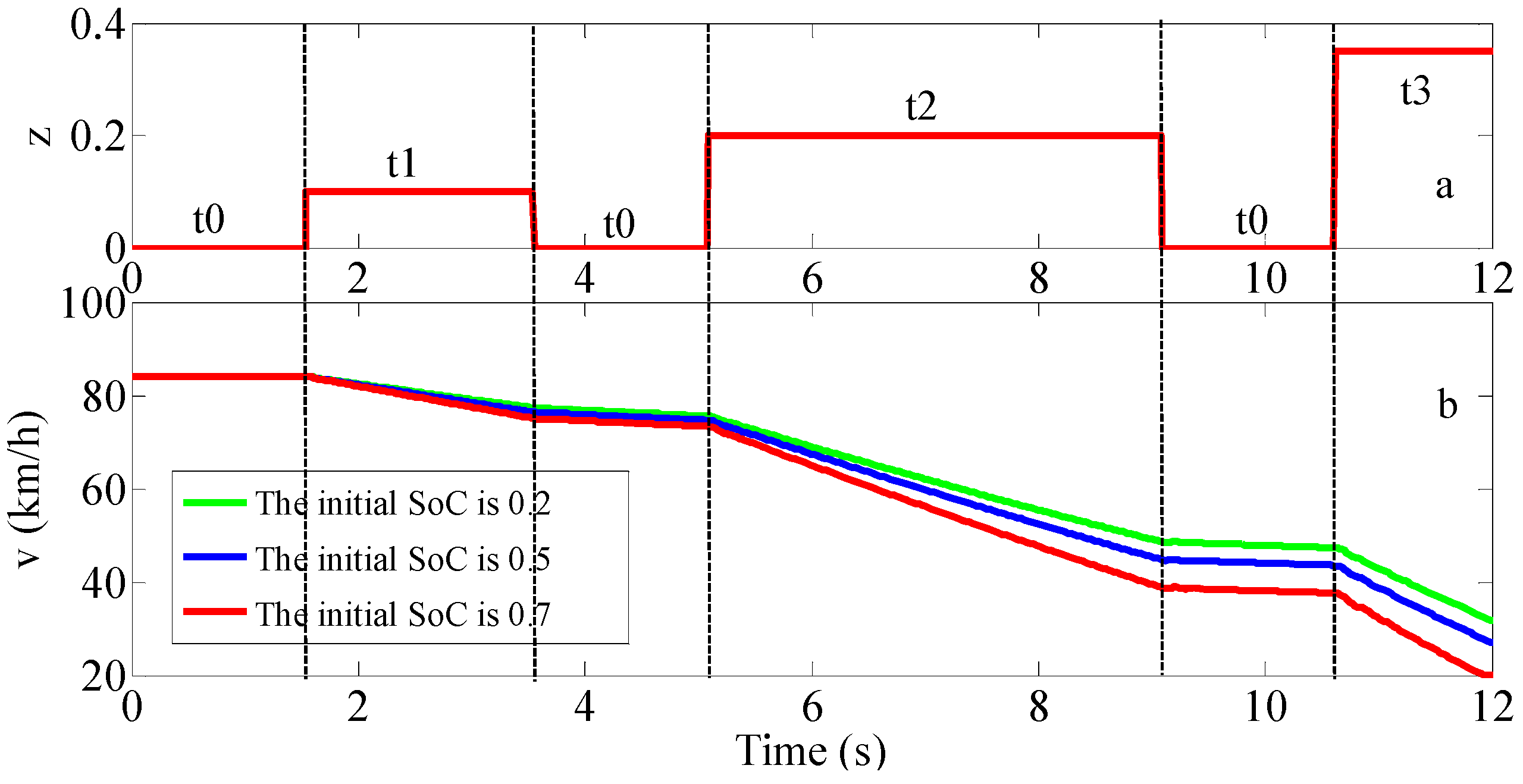
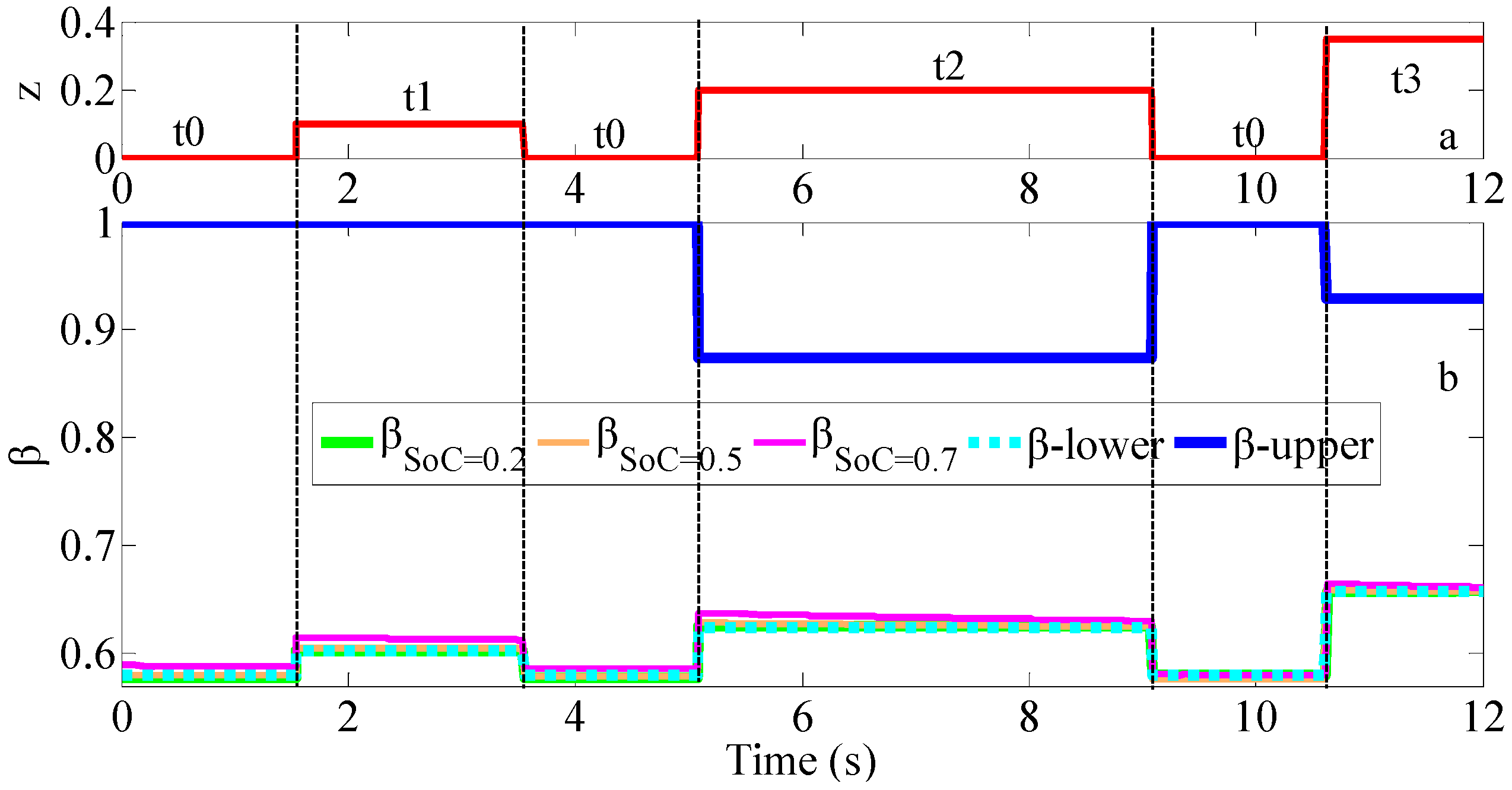
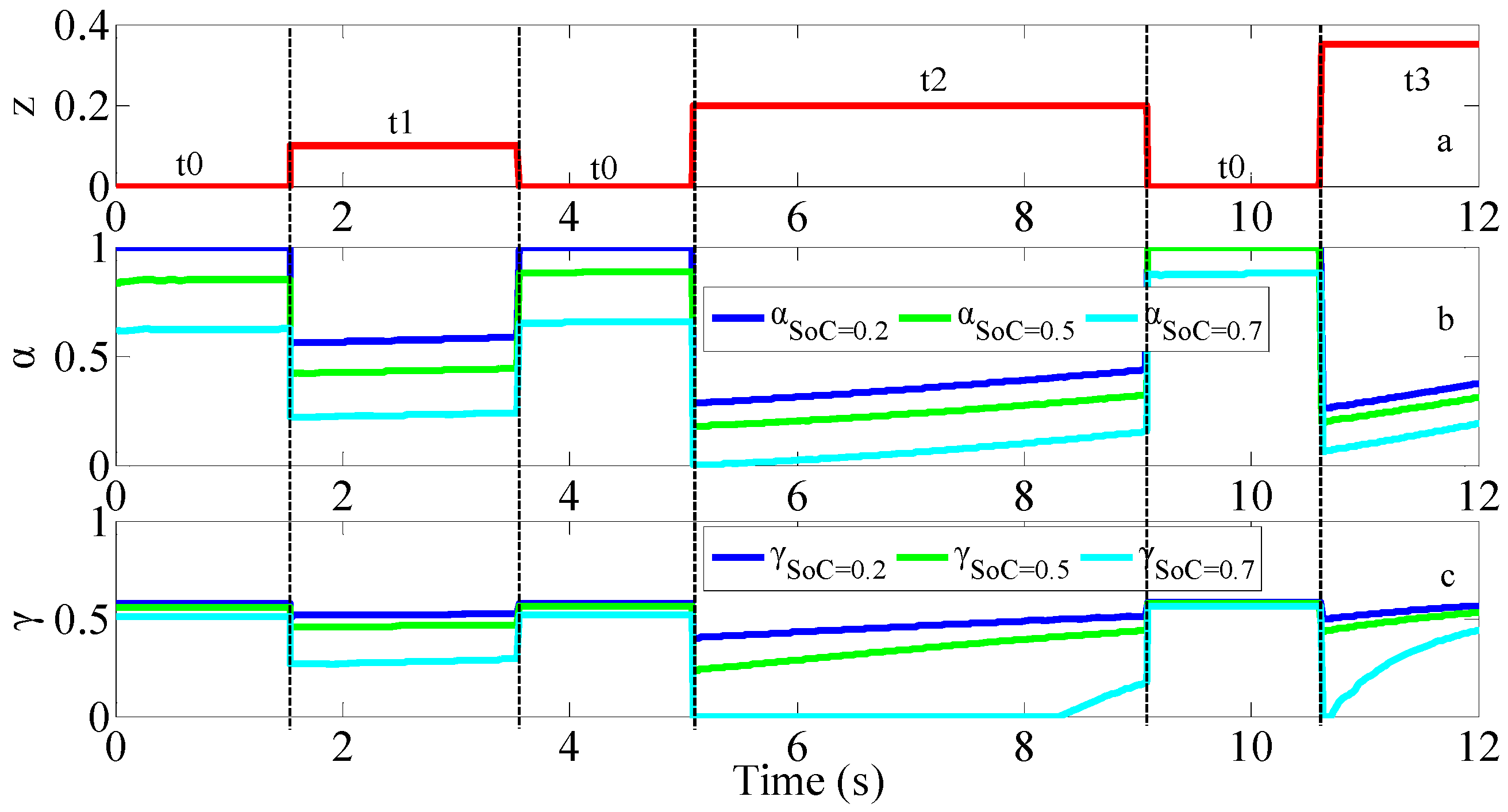
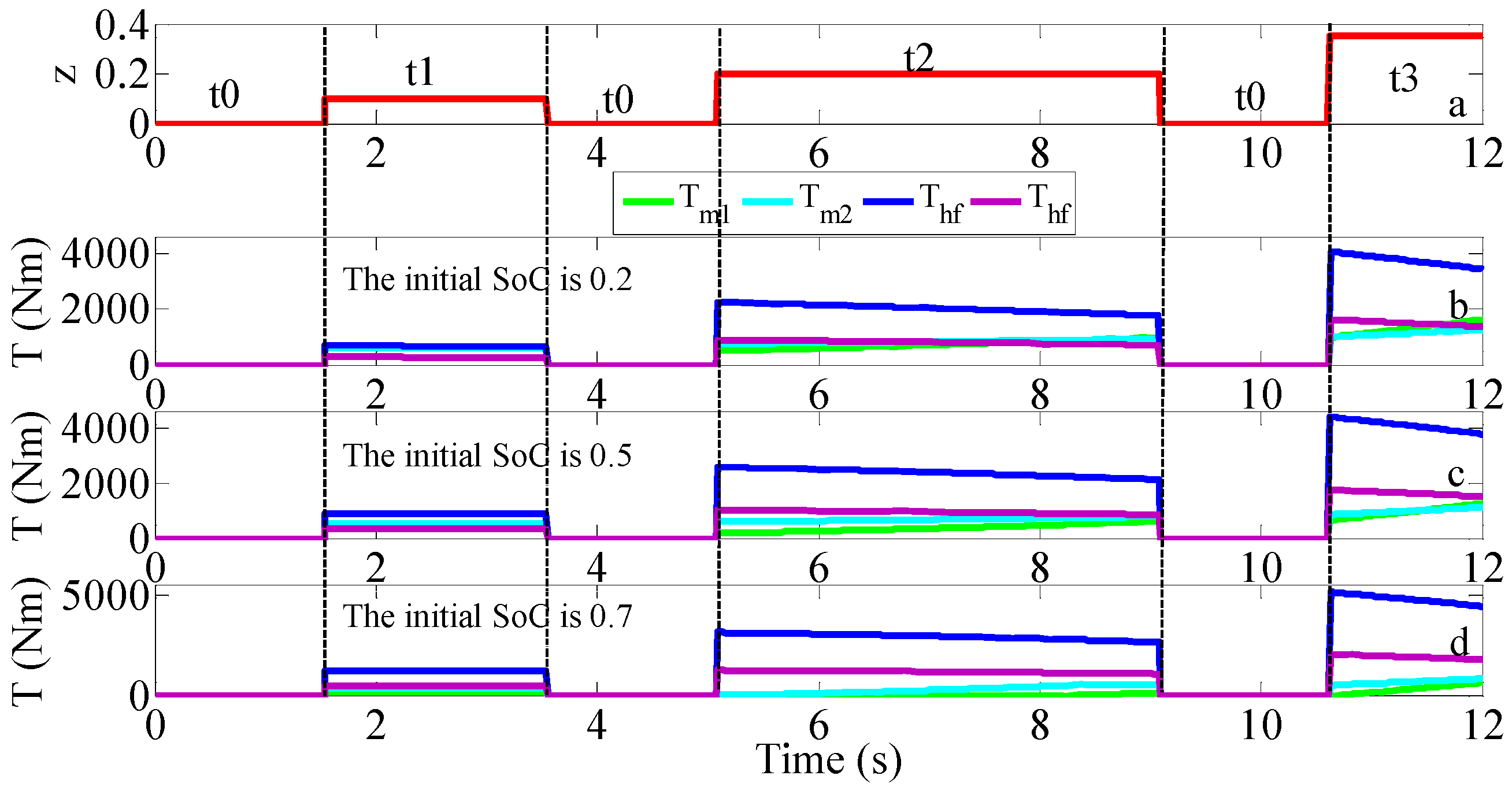
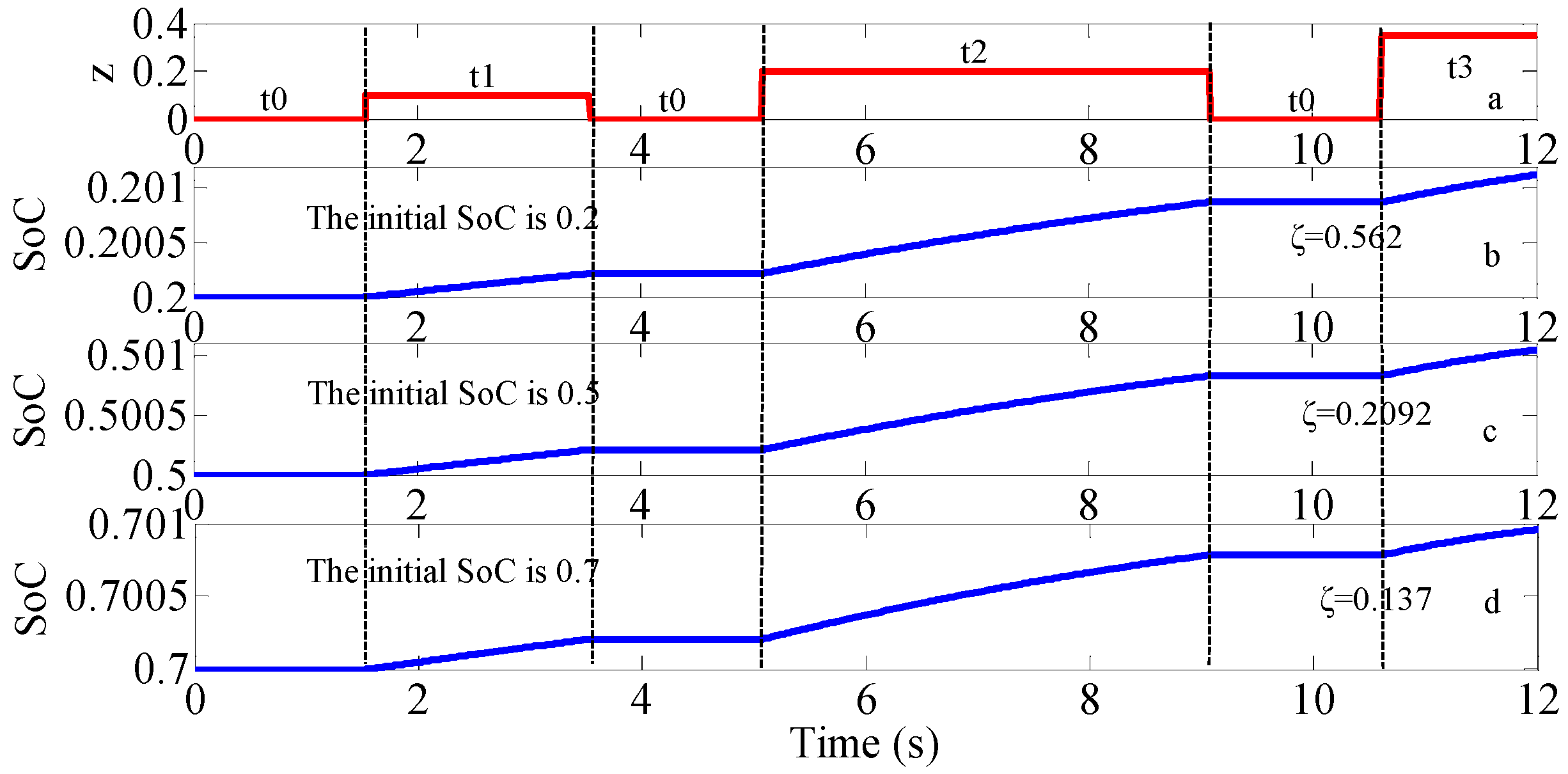
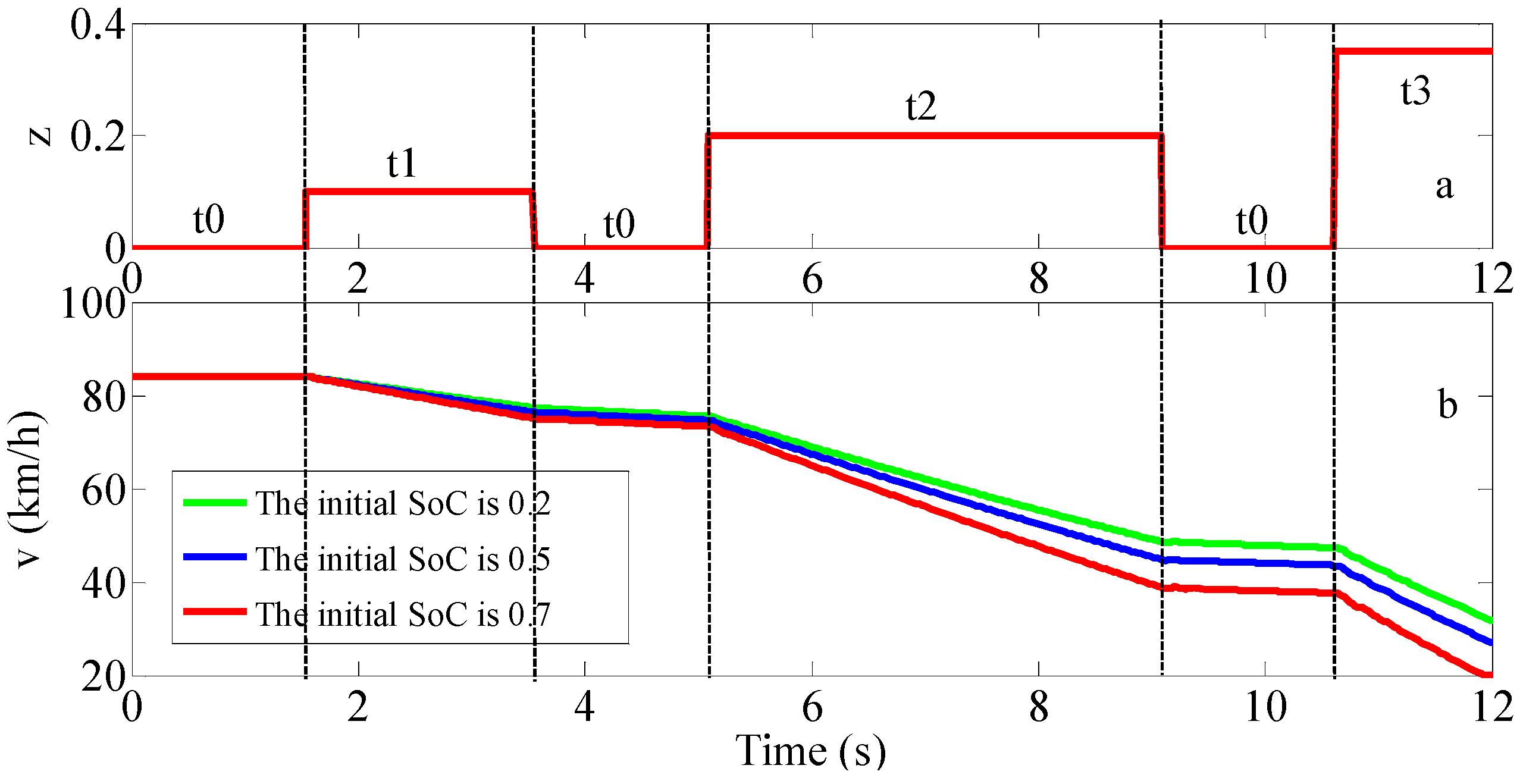
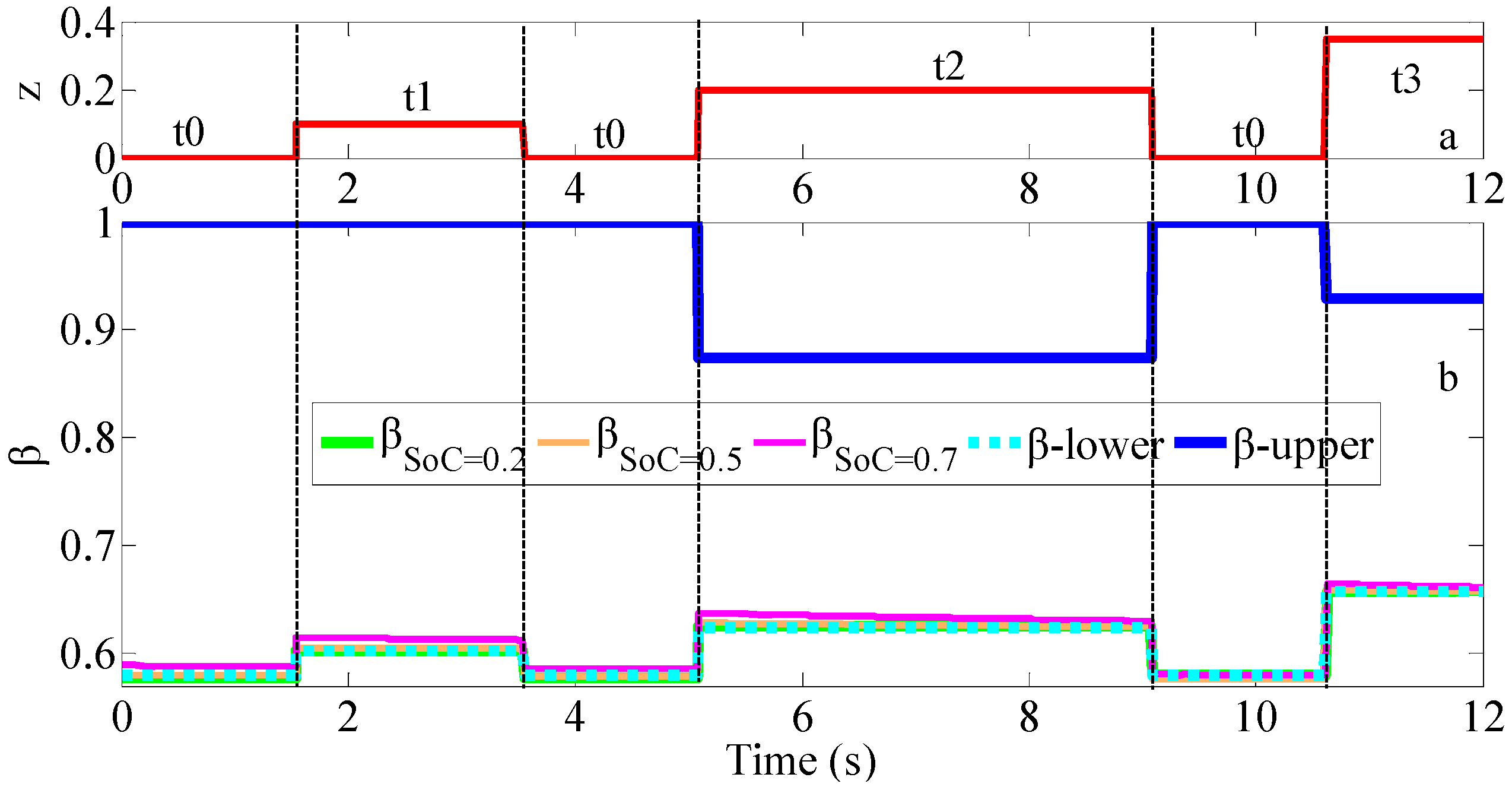
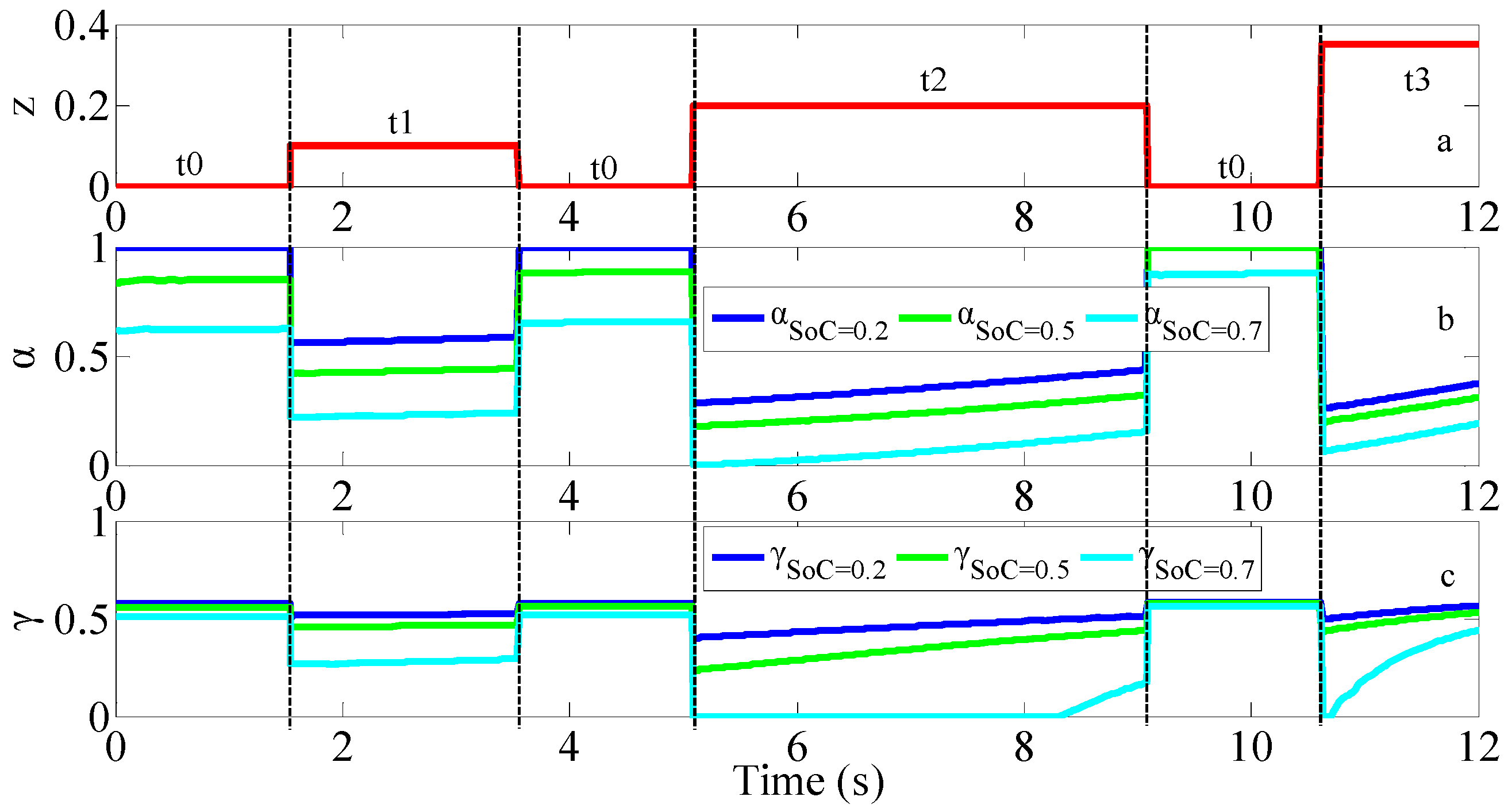
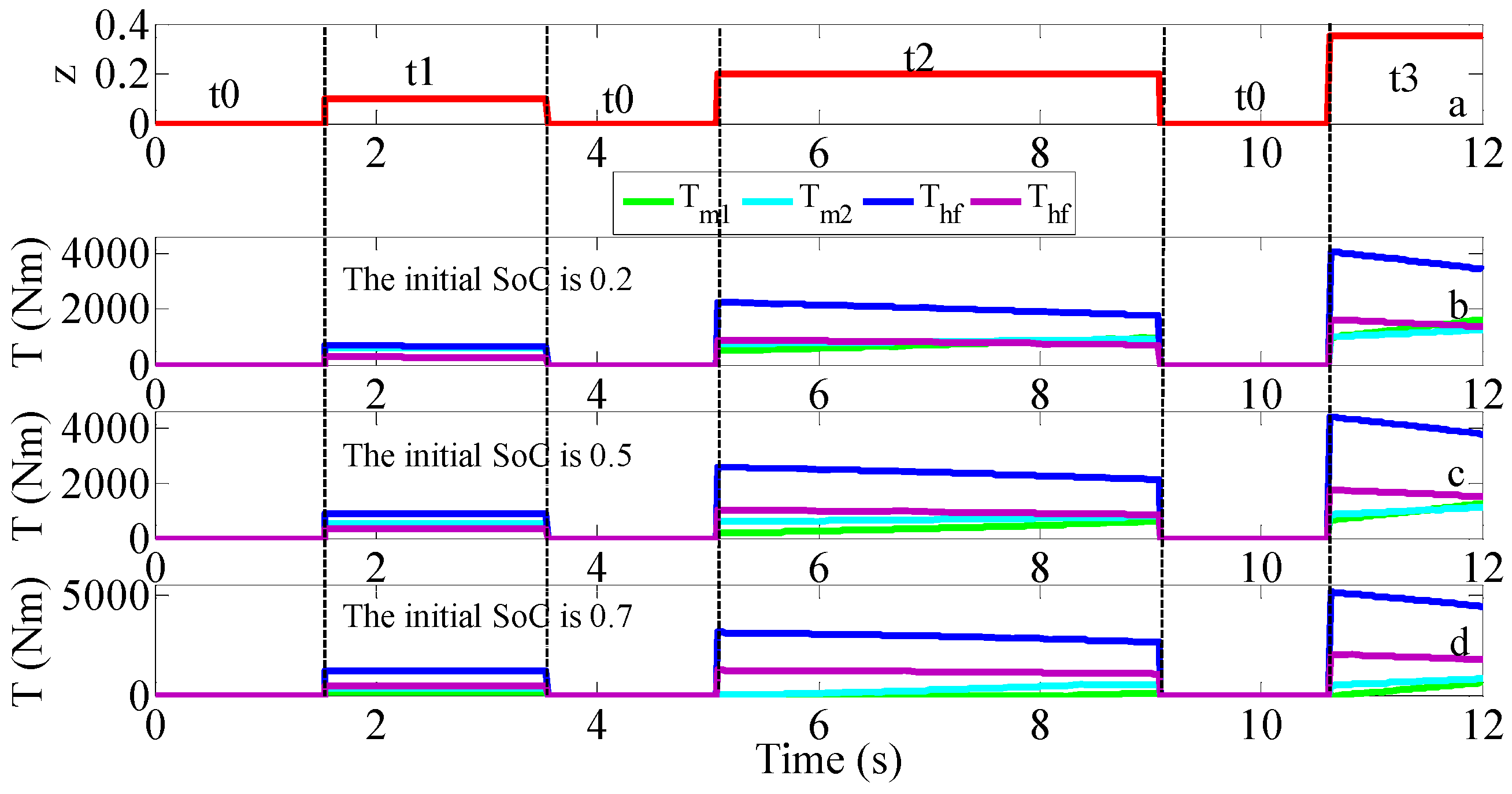
5.2. Dynamic Simulation Results
- (1)
- the initial battery SoC is 0.2;
- (2)
- the initial battery SoC is 0.5;
- (3)
- the initial battery SoC is 0.7.
6. Conclusions
- (1)
- A combined cooperative braking model was built and was evaluated by simulations. Compared to other models, the combined model is more reasonable for the cooperative braking system, which can provide a better braking stability under the condition that no additional braking torque is required for the braking system.
- (2)
- To get a tradeoff between the maximum regenerative energy recovery efficiency and the optimum braking stability, a CO is applied for the cooperative braking system.
- (3)
- To solve the poor real-time problem of the optimization, a high-precision predictive model based on the off-line optimization data of the combined model is built, and a predictive control strategy is proposed and verified through simulation. It can be seen that the predictive model can solve the poor real-time performance of the optimization. In addition, due to the predictive model is deduced by the off-line optimization results through the Kriging approximation method, it performs well with a good predictive precision for the cooperative braking system.
- (4)
- To avoid the possible conditions that the vehicle falls into a dangerous state in some cases due to the predictive precision of the predictive model, two additional conditions are provided to ensure braking safety, as a sacrifice, the cooperative braking performance will be limited.
Conflicts of Interest
Nomenclature
| ABS | Anti-lock braking system |
| ASA | Adaptive simulated annealing |
| CO | Collaborative optimization algorithm |
| EV | Electric vehicle |
| Opt LHD | The optimal Latin hypercube design |
| SoC | The state of charge |
| R2 | Multiple correlation coefficient |
| v | The vehicle speed |
| Tm1 | The front motor regenerative braking torque |
| Tm2 | The rear motor regenerative braking torque |
| Thf | The front hydraulic braking torque |
| Thr | The rear hydraulic braking torque |
| Fxb1 | The front road braking force |
| Fxb2 | The rear road braking force |
| Fz1 | The road normal reaction force in the front wheels |
| Fz2 | The road normal reaction force in the rear wheels |
| rw | The radius of the wheels |
| ωf | The angular velocity of the front wheels |
| ωr | The angular velocity of the rear wheels |
| Nxf | The thrust of the front axle |
| Nxr | The thrust of the rear axle |
| mfg | The gravity of the front axle |
| mrg | The gravity of the rear axle |
| G | The mass of the vehicle |
| Lf | The front wheelbase |
| Lr | The rear wheelbase |
| L | The wheelbase |
| Hg | The centroid height of the vehicle |
| Trm | The required braking torque |
| z | The braking severity |
| m | The mass of the vehicle |
| β | The braking force distribution coefficient |
| Tm | The total regenerative braking torque |
| α | The coordinate distribution coefficient |
| η | The coordinate coefficient of the hydraulic brakes |
| ρ | The performance value of the proportional valve |
| γ | The secondary allocation coefficient |
| Topt | The ideal regenerative braking torque |
| Tmot_generation | The maximum charge torque of motors |
| Tbat_charge | The maximum rechargeable torque of the battery |
| n | The motor speed |
| Ic | The charging current |
| fT(n) | The charging torque of motors |
| fefficient(n,fT(n)) | The charging efficiency of the motors |
| fT(SoC,n) | The rechargeable torque of the battery |
| Pcharing | The charging power |
| Pcharing_max | The maximum charging power |
| fefficient(SoC,Ic) | The rechargeable torque efficiency of the battery |
| Esoc | The voltage of the battery |
| R | The internal resistance of battery |
| μf | The adhesion rate of the front wheels |
| μr | The adhesion rate of the rear wheels |
| βopt | The optimum braking stability value |
| Tout1 | The maximum braking torque of the Motor 1 under a given n |
| Tout2 | The maximum braking torque of the Motor 2 under a given n |
| β-lower | The lower bound of β |
| β-upper | The upper bound of β |
| Troad_front | The maximum road braking torque of the front wheels |
| Troad_rear | The maximum road braking torque of the rear wheels |
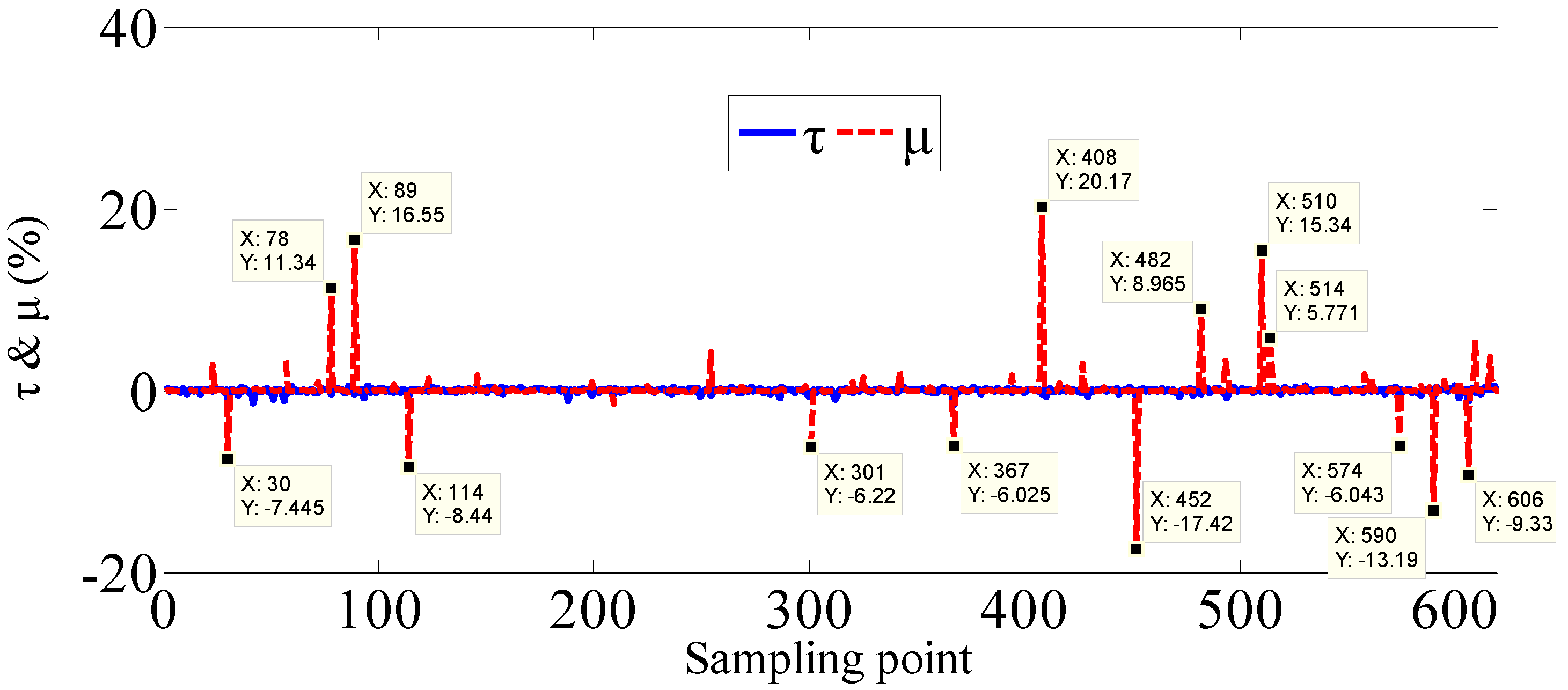
| ε | the evaluation parameter of Tm |
| μ | The relative error of α |
| τ | The relative error of γ |
The predictive value of α | |
The predictive value of γ | |
The predictive value of β | |
the predictive value of Thf | |
The predictive value of Thr | |
The predictive value of Tm1 | |
The predictive value of Tm2 | |
| ζ | The evaluation parameter of SoC |
| SoCend | The end-state of SoC |
| SoCinitial | The initial-state of SoC |
References
- Chau, K.; Li, W.; Lee, C. Challenges and opportunities of electric machines for renewable energy. Prog. Electromagn. Res. B 2012, 42, 45–74. [Google Scholar] [CrossRef]
- Abdelsalam, A.; Cui, S. A fuzzy logic global power management strategy for hybrid electric vehicles based on a permanent magnet electric variable transmission. Energies 2012, 5, 1175–1198. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Online estimation of peak power capability of Li-batteries in electric vehicles by a hardware-in-loop approach. Energies 2012, 5, 1455–1469. [Google Scholar] [CrossRef]
- Falcone, P.; Khoshfetrat Pakazad, S.; Solyom, S. Predictive Approaches to Rear Axle Regenerative Braking control in Hybrid Vehicle. In Proceedings of the IEEE Conference on Decision and Control and 28th Chinese Control Conference, Shanghai, China, 16–18 December 2009; pp. 7627–7632.
- Clikanek, S.; Bailey, K. Electric Vehicle Braking Systems. In Proceedings of the 14th International Electric Vehicle Symposium and Exhibition, Orlando, FL, USA, 15–17 December 1997.
- Liang, B.; Lin, W. Optimal Regenerative Torque Control to Maximize Energy Recapture of Electric Vehicles. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010.
- Bera, T.; Bhattacharya, K.; Samantaray, A. Bond graph model-based evaluation of a sliding mode controller for a combined regenerative and antilock braking system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 918–934. [Google Scholar]
- Peng, D.; Zhang, Y.; Yin, C. Combined control of a regenerative braking and antilock braking system for hybrid electric vehicles. Int. J. Automot. Technol. 2008, 9, 749–757. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, X.; Zhang, P. Integrated control of braking energy regeneration and pneumatic anti-lock braking. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 587–610. [Google Scholar] [CrossRef]
- Zhang, J.; Lv, C.; Gou, J.; Kong, D. Cooperative control of regenerative braking and hydraulic braking of an electrified passenger car. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1289–1302. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the effectiveness of regenerative braking for EV and HEV. SAE Trans. 1999, 108, 3184–3190. [Google Scholar]
- Bailey, K.E.; Cikanek, S.R. Comparison of Energy Recovery Capability of Electric Vehicle Braking Systems. In Proceedings of the 3th International Symposium on Advanced Vehicle Control, Aachen, Germany, 24–28 June 1996; Volume 2, pp. 1227–1252.
- Jo, C.; Ko, J.; Yeo, H.; Yeo, T.; Hwang, S.; Kim, H. Cooperative regenerative braking control algorithm for an automatic-transmission-based hybrid electric vehicle during a downshift. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 457–467. [Google Scholar] [CrossRef]
- Sangtarash, F.; Esfahanian, V.; Nehzati, H.; Haddadi, S.; Bavanpour, M.; Haghpanah, B. Effect of Different Regenerative Braking Strategies on Braking Performance and Fuel Economy in a Hybrid Electric Bus Employing CRUISE Vehicle Simulation. In Proceedings of the SAE International Powertrains, Fuels and Lubricants Congress, Shanghai, China, 23–25 June 2008.
- Hoon, Y.; Hyunsoo, K. Development of Regenerative Braking Hydraulic Module and HIL Simulator for Hybrid Electric Vehicle. In Proceedings of the 23rd Chinese Control Conference, Wuxi, China, 10–13 August 2004; pp. 1551–1556.
- Yeo, H.; Kim, T.; Kim, C.; Kim, H. Performance Analysis of Regenerative Braking System for Parallel Hybrid Electric Vehicle Using HILS. In Proceedings of the 14th International Electric Vehicle Symposium and Exhibition, Orlando, FL, USA, 15–17 December 1997.
- Yeo, H.; Kim, H. Hardware-in-the-loop simulation of regenerative braking for a hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 855–864. [Google Scholar] [CrossRef]
- Yao, J.; Zhong, Z.; Sun, Z. A Fuzzy Logic Based Regenerative Braking Regulation for a Fuel Cell Bus. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety (ICVES), Beijing, China, 13–15 December 2006; pp. 22–25.
- Nabi, A.; Fazeli, A.; Valizadeh, M. Development of a Brake Control System for a Series Hybrid Electric City Bus Using Fuzzy Logic. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Henan, China, 25–28 June 2006; pp. 1345–1350.
- Ahn, J.; Jung, K.; Kim, D. Modeling and Simulation of Electro-Mechanical Brake for Hybrid Electric Vehicles. In Proceedings of the 22th International Electric Vehicle Symposium and Exhibition, Yokohama, Japan, 23–28 October 2006; pp. 687–697.
- Jo, C.; Kim, H. Performance Analysis of Electro-Mechanical Brake System for a Hybrid Electric Vehicle Using HILS. In Proceedings of the 23th International Electric Vehicle Symposium and Exhibition, Anaheim, CA, USA, 2–5 December 2007; pp. 979–988.
- Yeo, H.; Hwang, S.; Kim, H. Regenerative braking algorithm for a hybrid electric vehicle with CVT ratio control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 220, 1589–1600. [Google Scholar] [CrossRef]
- Mitschke, M.; Wallentowitz, H. Vehicle Dynamics(in Chinese), 4th ed.; Tsinghua University Press: Beijing, China, 2009; pp. 156–210. Chen, M.; Yu, Q., Translators. [Google Scholar]
- Kroo, I.; Manning, V. Collaborative Optimization: Status and Directions. In Proceedings of the 8th AIAA/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Long Beach, CA, USA, 6–8 September 2000.
- Ingber, L. Adaptive simulated annealing (ASA): Lessons learned. Control Cybern. 1996, 25, 33–54. [Google Scholar]
- Koch, P.; Wujek, B.; Golovidov, O.; Simpson, T. Facilitating Probabilistic Multidisciplinary Design Optimization Using Kriging Approximation Models. In Proceedings of the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis & Optimization, Atlanta, GA, USA, 4–6 September 2002.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Guo, H.; He, H.; Sun, F. A Combined Cooperative Braking Model with a Predictive Control Strategy in an Electric Vehicle. Energies 2013, 6, 6455-6475. https://doi.org/10.3390/en6126455
Guo H, He H, Sun F. A Combined Cooperative Braking Model with a Predictive Control Strategy in an Electric Vehicle. Energies. 2013; 6(12):6455-6475. https://doi.org/10.3390/en6126455
Chicago/Turabian StyleGuo, Hongqiang, Hongwen He, and Fengchun Sun. 2013. "A Combined Cooperative Braking Model with a Predictive Control Strategy in an Electric Vehicle" Energies 6, no. 12: 6455-6475. https://doi.org/10.3390/en6126455
APA StyleGuo, H., He, H., & Sun, F. (2013). A Combined Cooperative Braking Model with a Predictive Control Strategy in an Electric Vehicle. Energies, 6(12), 6455-6475. https://doi.org/10.3390/en6126455