Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components

Abstract
:
1. Introduction
- DC generators: these generators consist of a spinning armature and a surrounding stationary and constant field, generated by a winding or permanent magnet. The output of the turning armature is continuously mechanically switched, so that the output current flows in the same direction. The addition of commutators and brushes makes DC designs more expensive and less reliable than comparable AC generators. It is for this reason that AC generators are used more often than DC ones.
- AC synchronous generators (alternators): the rotor in these generators has magnetic poles that create the field. There are two types of synchronous generators:
- ○
- Synchronous Generators with a wound rotor. Slip rings on the rotor feed DC into wire-wound magnetic pole pieces, which provide the magnetic field for generator action, and reactive power (kVAs) supplied by the machine to the grid [8]. They are common in the largest machines, and require maintenance of the slip ring contacts [9].
- ○
- Permanent Magnet Synchronous Generators (PMSG). The magnetic field is provided by permanent magnetic poles in place in the rotor. They require no external excitation current to create the magnetic field, nor the use of slip rings. The flux density of high performance permanent magnets is limited, and there is no way to control the strength of the magnetic field. Large high-performance permanent magnets are costly, and PMSG are commonly used for smaller wind turbines. In PMSG, a diode bridge rectifier may be used at the generator terminals as no external excitation current is needed. Much research has been performed using a diode rectifier. Using a thyristor-based grid-side inverter allows continuous control of the inverter firing angle, regulating turbine speed through the DC-link voltage [10,11].
- Induction Generators (AC asynchronous generators): the current in the rotor is induced by the differential speed of the spinning rotor coils with respect to the spinning stator magnetic field. The induction generators have the disadvantage of requiring external reactive power, and depend on an external voltage source to produce a magnetic field [12]. The induction generator has two main constructive forms:
- ○
- Doubly Fed Induction Generators (DFIG) have the rotor wound in copper or aluminium. Their advantage is that the torque can be maintained at its rated value well above the synchronous speed. It is able to produce, not only below, but even above rated power, and to transfer maximum power over a wide speed range [13,14,15]. DFIG are externally accessible through slip rings and brushes and can be controlled in the following two ways [16]: (i) the electrical torque and the slip percentage can be controlled by inserting a variable resistor in the wound rotors; (ii) the injection of currents of appropriate frequency into the rotor windings with a power converter can control both the torque and the slip [17]. Then, the converter power rating is reduced while most of the power flows through the stator, directly connected to the grid [14]. This makes the DFIG excellent for high power applications.
- ○
- Squirrel-Cage Induction Generators (SCIG) are the simplest form of induction generators. They have a rotor formed from welded copper bars, rods or copper castings embedded in a soft iron cylindrical rotor. They are relatively inexpensive, robust, and have maintenance-free operation. The speed of the SCIG may be regulated by means of a rectifier and an inverter interposed between the cage induction generator stator and the grid [12,18]. The power converter has to be rated at total system power. The supply side PWM inverter allows for control of real and reactive power transferred to the grid, which is the configuration studied in this paper.
- Measuring wind velocity and adjusting the turbine rotating speed to the maximum power coefficient.
2. Method
2.1. System Description


2.2. Wind Turbine Model


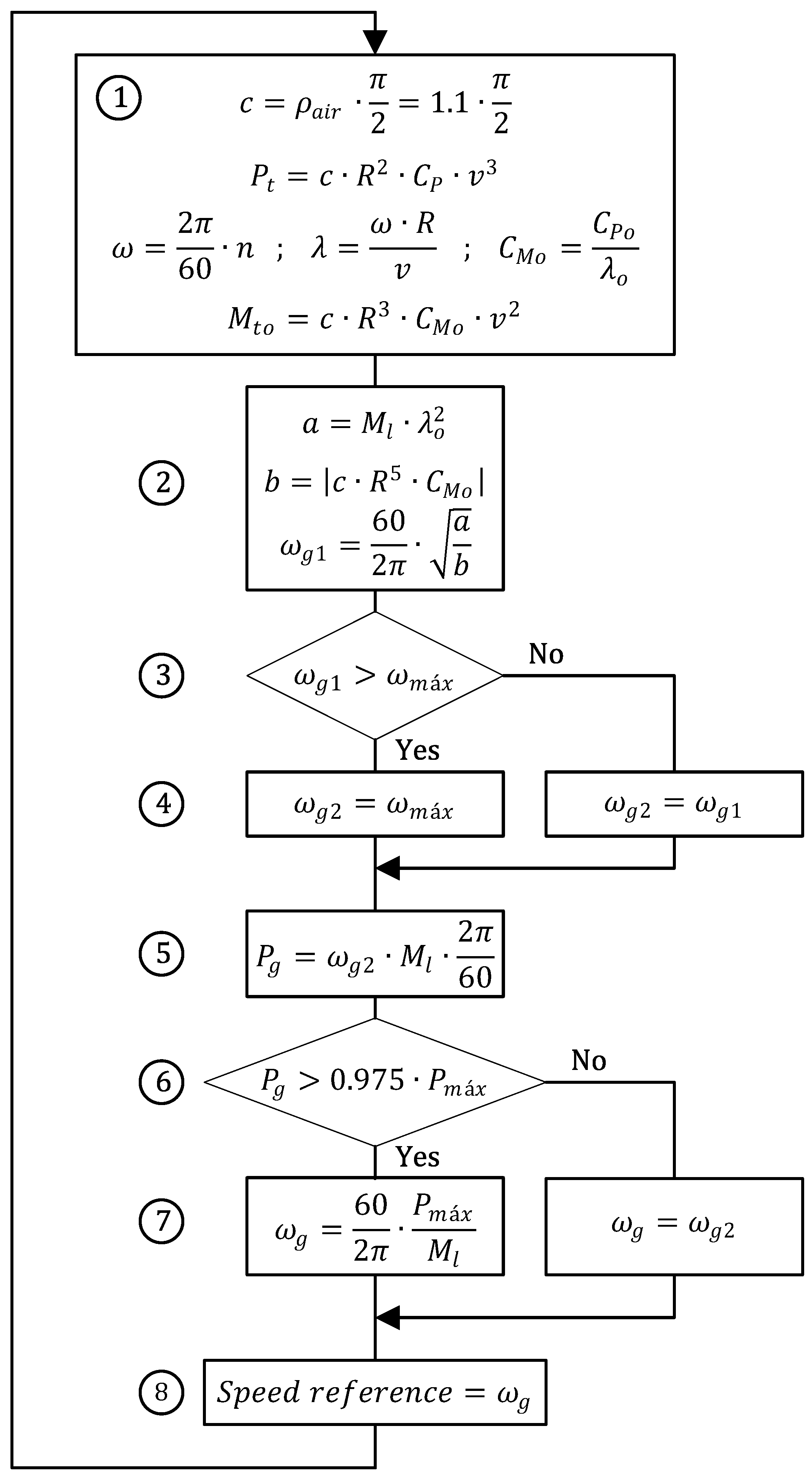
2.3. Wind Turbine Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum power coefficient | 0.482 |
| Optimum λ | 6.75 |
| Radius | 1.0 m |
| Air density | 1.1 Kg/m3 |

3. Results
3.1. First Test—Power Limit Control
- Below this wind speed, the control unit maintains the optimal operational point of the turbine according to torque Equation (11).
- Above this wind speed, the control unit maintains power generation at a constant operation of 600 W.



| Magnitudes | Optimum | Maximum power | Global |
|---|---|---|---|
| Wind speed interval (m/s) | 5.8–9.18 | 9.18–11 | 5.8–11 |
| Time (s) | 77 | 63 | 140 |
| Avg. wind speed (m/s) | 7.56 | 9.91 | 8.60 |
| Avg. torque (Nm) | 5.1 | 9.5 | 7.0 |
| Avg. speed (rpm) | 447 | 563 | 498 |
| Avg. generated power (W) | 253 | 559 | 388 |
| Avg. relative performance (%) | 71.8 | 93.2 | 84.2 |
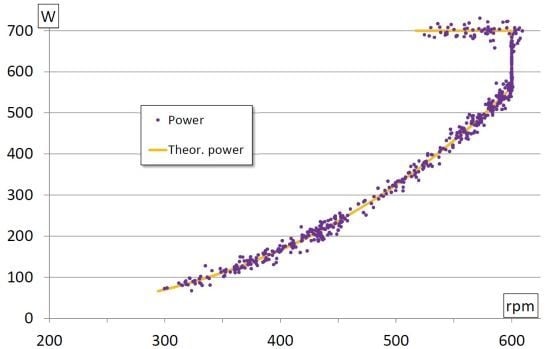
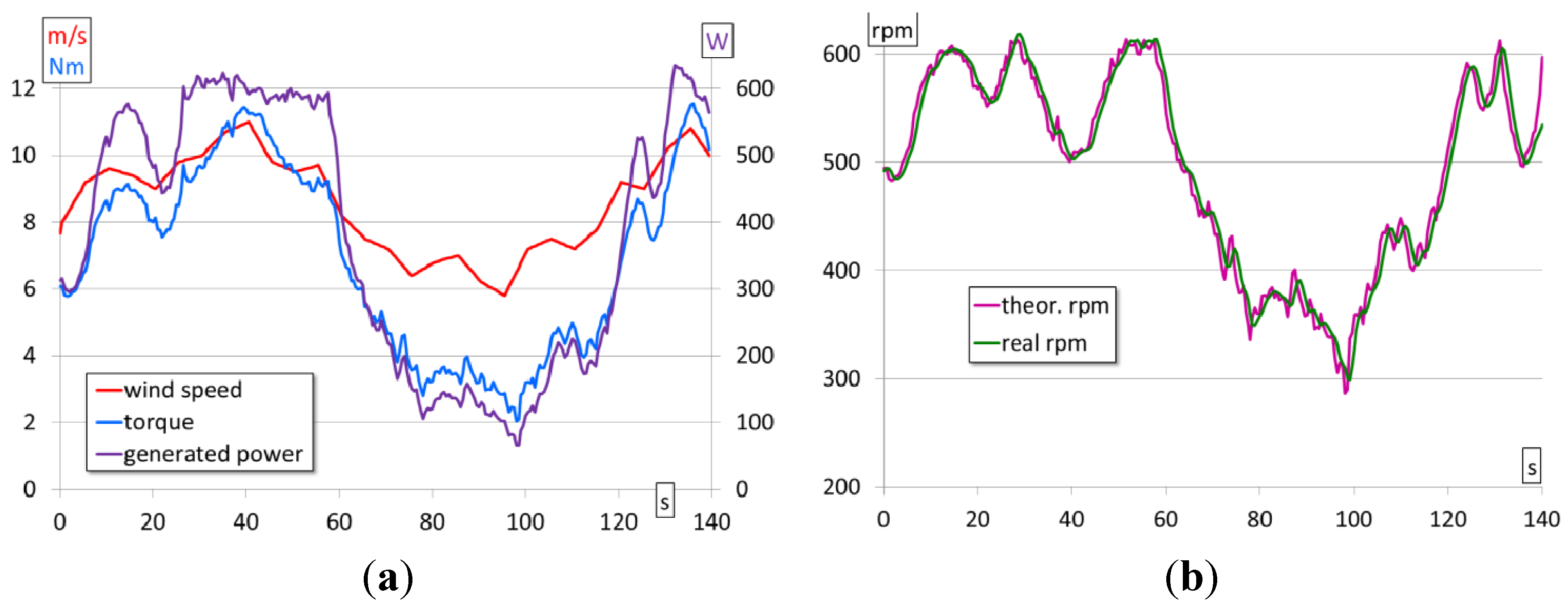
3.2. Second Test—Speed and Power Limit Control
- A speed limit of 600 rpm is set, which corresponds to a wind speed of 8.98 m/s.
- A limit is set for power generation at 700 W. It corresponds, to a wind speed of 9.66 m/s.
- Below a wind speed of 8.98 m/s, the control unit maintains operation at the optimal point of the turbine according to torque Equation (11).
- Between a wind speed of 8.98 and 9.66 m/s, the control unit maintains a constant rotational speed of 600 rpm.
- Above a wind speed of 9.66 m/s, the control unit maintains a constant power generating operation of 700 W.



| Magnitudes | Optimum | Maximum rpm | Maximum power | Global |
|---|---|---|---|---|
| Wind speed interval (m/s) | 5.8–8.98 | 8.98–9.66 | 9.66–11 | 5.8–11 |
| Time (s) | 292 | 161 | 147 | 600 |
| Avg. wind speed (m/s) | 7.33 | 9.35 | 10.27 | 8.60 |
| Avg. torque (Nm) | 4.8 | 8.5 | 10.7 | 7.2 |
| Avg. speed (rpm) | 434 | 582 | 587 | 511 |
| Avg. generated power (W) | 226 | 517 | 658 | 410 |
| Avg. relative performance (%) | 71.3 | 81.4 | 94.0 | 82.7 |
4. Discussion
4.1. Variable-Speed Operation
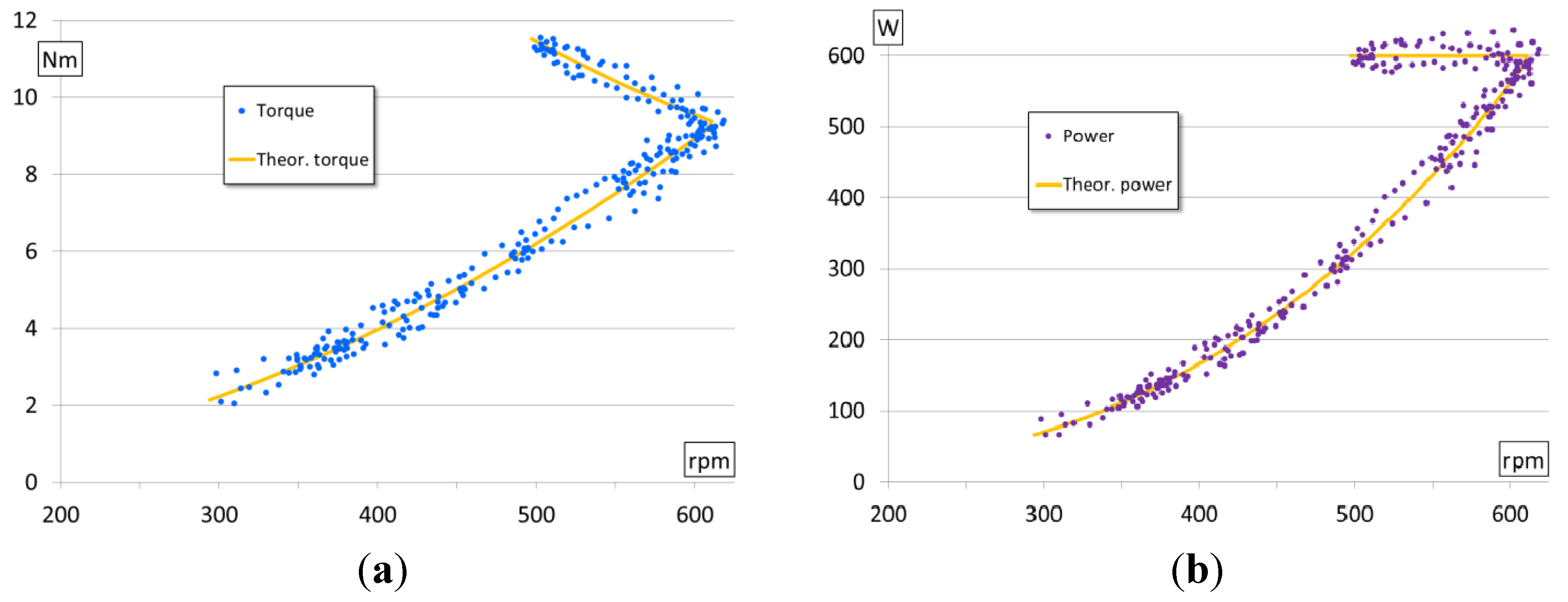
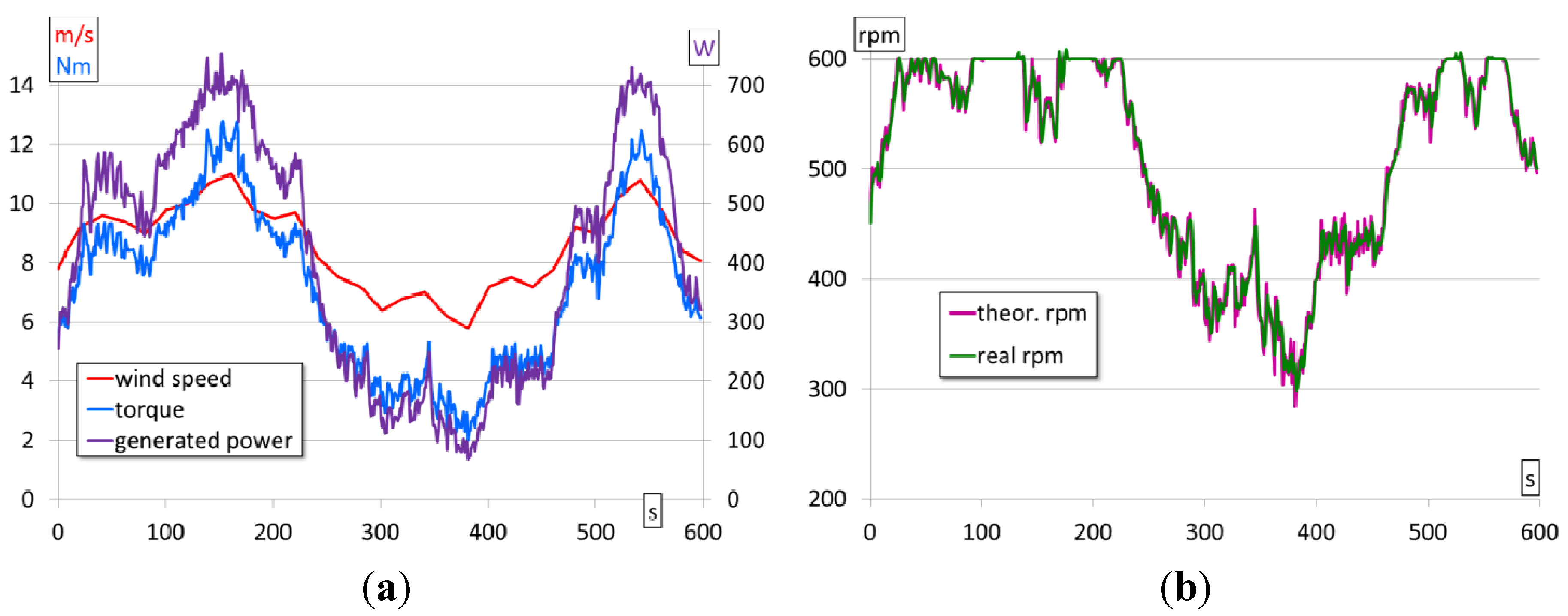
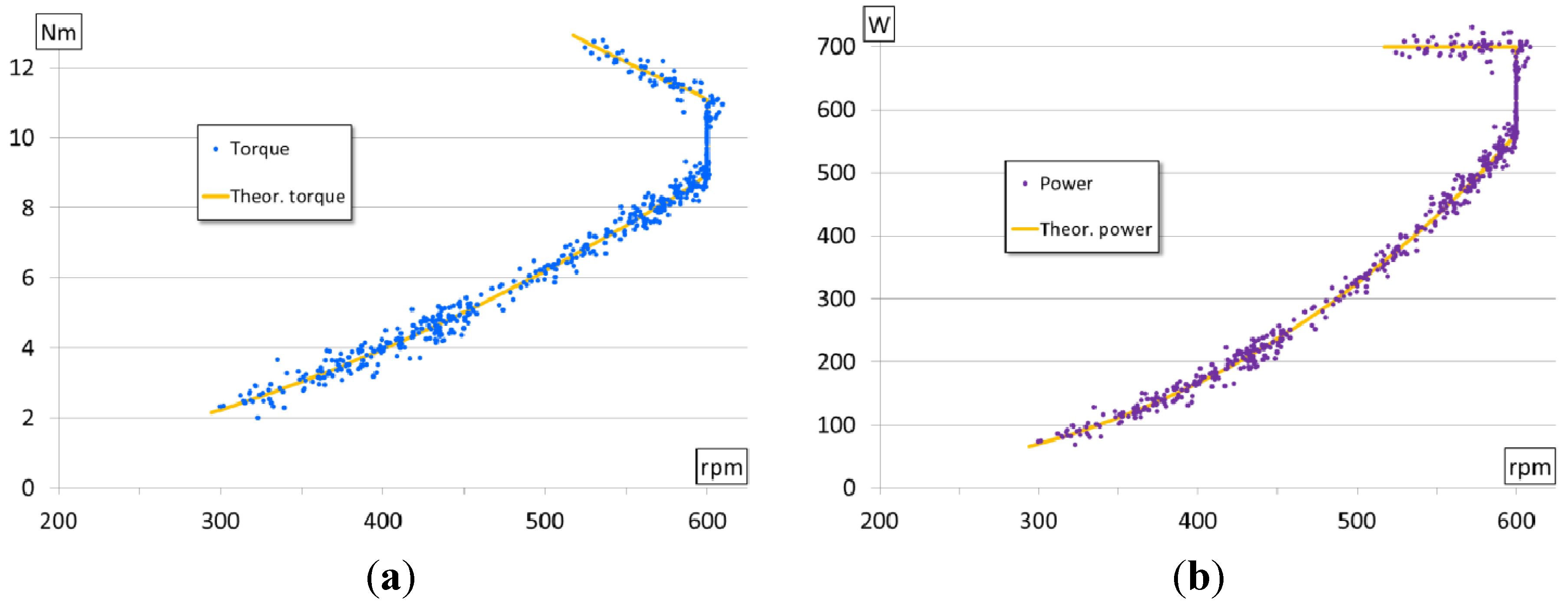
- The control operates the turbine at its optimum point speed, when the maximum rotational speed and the maximum power limit are not reached. The turbine speed, given by Equation (11), is set to generate maximum power, which may be seen from Figure 7b and Figure 10b. The most distant points of the theoretical lines are due to data readings of transient periods.
- When the maximum rotational speed is reached, the control maintains turbine operation at its maximum, as seen in Figure 10b. The use of a frequency converter means that the speed limit control is very accurate.
- The control unit maintains the maximum admissible power generated by the turbine at high winds, by reducing its rotational speed, as seen in Figure 7b and Figure 10b. This causes a transient period where the power generated is above the maximum limit, because the torque increases, and because of wind turbine and generator inertia. For the sake of simplicity, wind turbine inertia is not considered in this study, because of its small influence on SWTs. The system surpasses the maximum power limit by less than 10% and only for a short time during the transient periods. This can be seen in Figure 7b and Figure 10b. These transient periods are not dangerous for the generator, as there is no significant overheating.
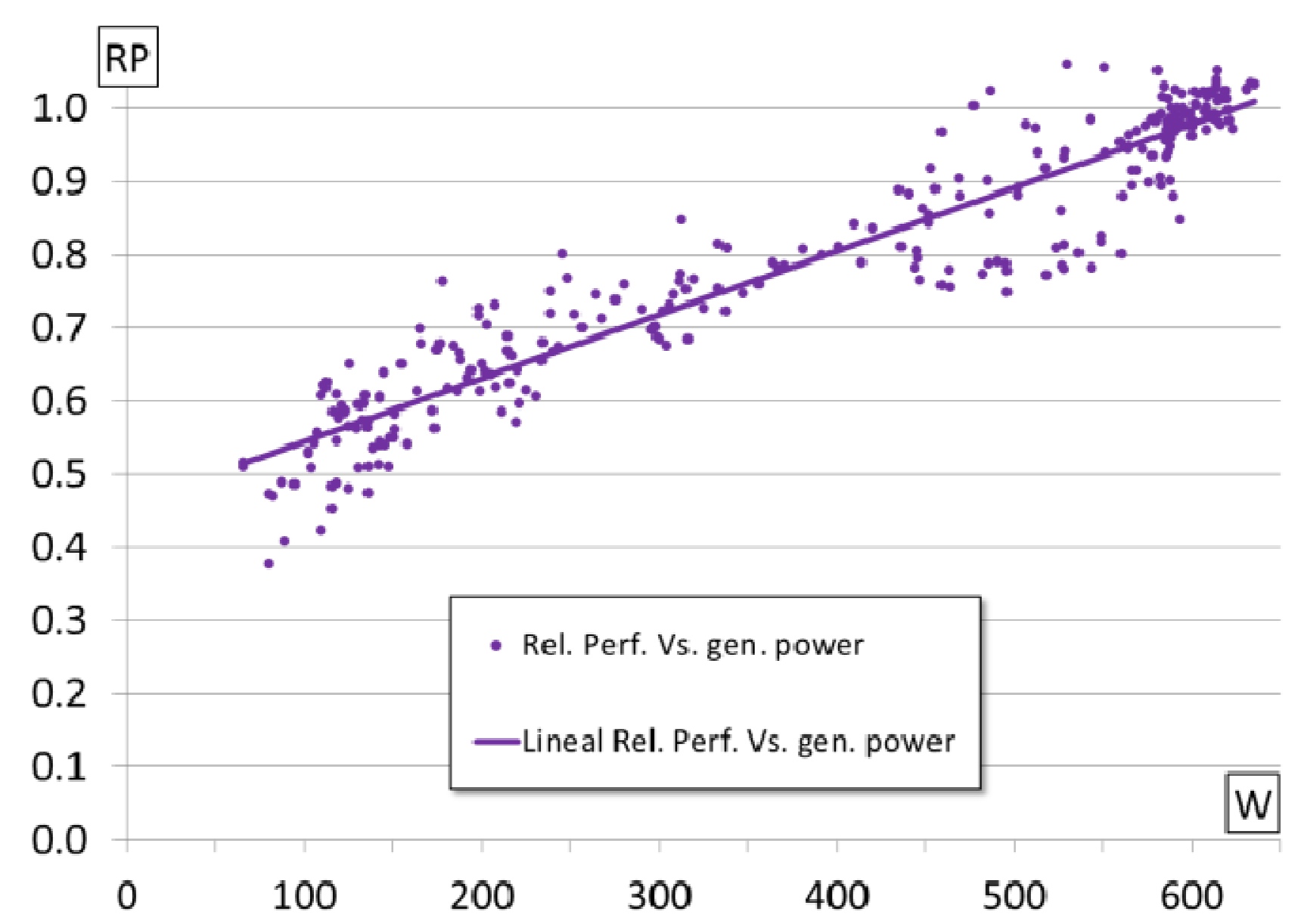
4.2. Relative Performance
4.3. Advantages and Disadvantages of the Proposed Wind Turbine
4.4. Limitations and Strengths of This Study
5. Conclusions
Nomenclature:
| DFIG | doubly fed induction generators |
| DSP | digital signal processor |
| FOC | field-oriented control |
| MPPT | maximum power point tracking |
| MWT | micro wind turbine |
| PMSG | permanent magnet synchronous generator |
| SCIG | squirrel-cage induction generator |
| SWT | small wind turbine |
| VSWT | very small wind turbine |
Conflicts of Interest
References
- Lenzen, M. Current state of development of electricity-generating technologies: A literature review. Energies 2010, 3, 462–591. [Google Scholar] [CrossRef]
- European Wind Energy Association. Wind Energy—The Facts: A Guide to the Technology, Economics and Future of Wind Power; Earthscan: London, UK, 2009. [Google Scholar]
- Eggleston, D.M.; Stoddard, F.S. Wind Turbine Engineering Design; Van Nostrand Reinhold: New York, NY, USA, 1987; p. 352. [Google Scholar]
- Pierce, K.G.; Migliore, P.G. Maximizing Energy Capture of Fixed-Pitch Variable-Speed Wind Turbines; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2000; p. 13. [Google Scholar]
- Quincy, W.; Liuchen, C. An intelligent maximum power extraction algorithm for inverter-based variable speed wind turbine systems. IEEE Trans. Power Electron. 2004, 19, 1242–1249. [Google Scholar] [CrossRef]
- Carlin, P.W.; Laxson, A.S.; Muljadi, E.B. The history and state of the art of variable-speed wind turbine technology. Wind Energy 2003, 6, 129–159. [Google Scholar] [CrossRef]
- Baroudi, J.A.; Dinavahi, V.; Knight, A.M. A review of power converter topologies for wind generators. Renew. Energy 2007, 32, 2369–2385. [Google Scholar] [CrossRef]
- Abdin, E.S.; Xu, W. Control design and dynamic performance analysis of a wind turbine-induction generator unit. IEEE Trans. Energy Convers. 2000, 15, 91–96. [Google Scholar] [CrossRef]
- Ramtharan, G.; Jenkins, N.; Anaya-Lara, O. Modelling and control of synchronous generators for wide-range variable-speed wind turbines. Wind Energy 2007, 10, 231–246. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Siota, T.; Isaka, T.; Sano, T.; Seki, K. Matching between straight-wing nonarticulated vertical axis wind turbine and a new wind turbine generator. Electr. Eng. Jpn. 2011, 174, 26–35. [Google Scholar] [CrossRef]
- Karrari, M.; Rosehart, W.; Malik, O.P. Comprehensive control strategy for a variable speed cage machine wind generation unit. IEEE Trans. Energy Convers. 2005, 20, 415–423. [Google Scholar] [CrossRef]
- Petersson, A.; Harnefors, L.; Thiringer, T. Evaluation of current control methods for wind turbines using doubly-fed induction machines. IEEE Trans. Power Electron. 2005, 20, 227–235. [Google Scholar] [CrossRef]
- Datta, R.; Ranganathan, V.T. Variable-speed wind power generation using doubly fed wound rotor induction machine—A comparison with alternative schemes. IEEE Trans. Energy Convers. 2002, 17, 414–421. [Google Scholar] [CrossRef]
- Ioannides, M.G. Doubly fed induction machine state variables model and dynamic response. IEEE Trans. Energy Convers. 1991, 6, 55–61. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Anaya-Lara, O.; Hughes, F.M.; Jenkins, N.; Strbac, G. Rotor flux magnitude and angle control strategy for doubly fed induction generators. Wind Energy 2006, 9, 479–495. [Google Scholar] [CrossRef]
- Leidhold, R.; Garcia, G.; Valla, M.I. Field-oriented controlled induction generator with loss minimization. IEEE Trans. Ind. Electron. 2002, 49, 147–156. [Google Scholar] [CrossRef]
- Pucci, M. Sensors-less neural maximum power point tracking control of induction machines wind generators by growing neural gas and minor component analysis EXIN plus reduced order observer. IET Control Theory Appl. 2010, 4, 1627–1638. [Google Scholar] [CrossRef]
- Datta, R.; Ranganathan, V.T. A method of tracking the peak power points for a variable speed wind energy conversion system. IEEE Trans. Energy Convers. 2003, 18, 163–168. [Google Scholar] [CrossRef]
- Bhowmik, S.; Spee, R.; Enslin, J.H.R. Performance optimization for doubly fed wind power generation systems. IEEE Trans. Ind. Appl. 1999, 35, 949–958. [Google Scholar] [CrossRef]
- Bharanikumar, R.; Kumar, A.N.; Maheswari, K.T. Novel MPPT controller for wind turbine driven permanent magnet generator with power converters. Int. Rev. Electr. Eng. 2010, 5, 1555–1562. [Google Scholar]
- Morimoto, S.; Nakamura, T.; Takeda, Y. Power maximization control of variable-speed wind generation system using permanent magnet synchronous generator. Electr. Eng. Jpn. 2005, 150, 11–19. [Google Scholar] [CrossRef]
- Bianchi, F.D.; Mantz, R.J.; Christiansen, C.F. Control of variable-speed wind turbines by LPV gain scheduling. Wind Energy 2004, 7, 1–8. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Clare, J.; Asher, G.; Proboste, J. MRAS observers for sensorless control of doubly-fed induction generators. IEEE Trans. Power Electron. 2008, 23, 1075–1084. [Google Scholar] [CrossRef]
- Bossanyi, E.A. Wind turbine control for load reduction. Wind Energy 2003, 6, 229–244. [Google Scholar] [CrossRef]
- Margaris, I.D.; Hansen, A.D.; Sørensen, P.; Hatziargyriou, N.D. Illustration of modern wind turbine ancillary services. Energies 2010, 3, 1290–1302. [Google Scholar] [CrossRef]
- Hazra, S.; Sensarma, P.S. Self-excitation and control of an induction generator in a stand-alone wind energy conversion system. IET Renew. Power Gener. 2010, 4, 383–393. [Google Scholar] [CrossRef]
- Miller, A.; Muljadi, E.; Zinger, D.S. A variable speed wind turbine power control. IEEE Trans. Energy Convers. 1997, 12, 181–186. [Google Scholar] [CrossRef]
- Simoes, M.G.; Bose, B.K.; Spiegel, R.J. Fuzzy logic based intelligent control of a variable speed cage machine wind generation system. IEEE Trans. Power Electron. 1997, 12, 87–95. [Google Scholar] [CrossRef]
- Ramirez, D.; Veganzones, C.; Blazquez, F. Adaptation of floating point DSP-based technology for small variable-speed-wind turbine. IEEE Trans. Energy Convers. 2007, 22, 376–382. [Google Scholar] [CrossRef]
- Freris, L.L. Wind Energy Conversion Systems; Prentice Hall: New York, NY, USA, 1990; p. 388. [Google Scholar]
- Burton, T. Wind Energy: Handbook; John Wiley & Sons: Chichester, UK, 2001; p. 617. [Google Scholar]
- Rajambal, K.; Chellamuthu, C. Modeling and Simulation of Grid Connected Wind Electric Generating System. In Proceedings of IEEE Region 10 Conference on Computers, Communications, Control and Power Engineering, Beijing, China, 28–31 October 2002; Volume 3, pp. 1847–1852.
- Leidhold, R.; García, G.; Valla, M.I. Control Para Máximo Rendiminto de Generadores Eólicos de Velocidad Variable, con Limitación de Velocidad y Potencia [in Spanish]. In Proceedings of the XIV Congresso Brasileiro de Automática, Natal, Brasil, 2–5 September 2002; pp. 3121–3126.
- Amin, M.M.N.; Mohammed, O.A. Vector Oriented Control of Voltage Source PWM Inverter as a Dynamic VAR Compensator for Wind Energy Conversion System Connected to Utility Grid. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition, Palm Springs, CA, USA, 21–25 February 2010; pp. 1640–1650.
- Molina, M.G.; Mercado, P.E. A New Control Strategy of Variable Speed Wind Turbine Generator for Three-Phase Grid-Connected Applications. In Proceedings of the Transmission and Distribution Conference and Exposition: Latin America, 2008 IEEE/PES, Bogota, Colombia, 13–15 August 2008; pp. 1–8.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cuesta, A.B.; Gomez-Gil, F.J.; Fraile, J.V.M.; Rodríguez, J.A.; Calvo, J.R.; Vara, J.P. Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components. Energies 2013, 6, 3373-3391. https://doi.org/10.3390/en6073373
Cuesta AB, Gomez-Gil FJ, Fraile JVM, Rodríguez JA, Calvo JR, Vara JP. Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components. Energies. 2013; 6(7):3373-3391. https://doi.org/10.3390/en6073373
Chicago/Turabian StyleCuesta, Andrés Bravo, Francisco Javier Gomez-Gil, Juan Vicente Martín Fraile, Jesús Ausín Rodríguez, Justo Ruiz Calvo, and Jesús Peláez Vara. 2013. "Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components" Energies 6, no. 7: 3373-3391. https://doi.org/10.3390/en6073373
APA StyleCuesta, A. B., Gomez-Gil, F. J., Fraile, J. V. M., Rodríguez, J. A., Calvo, J. R., & Vara, J. P. (2013). Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components. Energies, 6(7), 3373-3391. https://doi.org/10.3390/en6073373