1. Introduction
In consideration of cost and size, the three-phase transformers and three-phase inductors of three-phase inverters used in uninterruptible power supplies (UPS) normally have magnet cores with a three-limb structure, also known as a core-type structure [
1,
2,
3]. Hence, coupling exists between the three phases of the inverter because the main flux of each limb must pass through the other two limbs. In addition, a pulse width modulation (PWM) inverter in a UPS must introduce various instantaneous feedback control strategies, such as PID, multiple feedback controls,
etc. to adapt for diverse, unpredictable nonlinear loads [
4,
5]. However, in the design of instantaneous control strategies, the appropriate dynamic models become complex when magnetic coupling is considered. Typically this coupling has been ignored, in other words, a three-limb transformer is treated as the combination of three single-phase transformers and a three-limb inductor is treated as the combination of three single-phase inductors [
2,
3]. For many practical problems, this approximation is acceptable; however, its applicability is not fully understood.
While magnetic coupling is not considered for three-phase inverters, dynamic models in the
d-q rotation frame or in the α-β stationary frame are simpler than in the
a-b-c frame. Two sets of regulators, for positive and negative sequence components, can be introduced for unbalanced load conditions [
6,
7,
8,
9,
10,
11]. Unfortunately, even ignoring magnetic coupling, transient analysis is complex due to strong coupling between axes [
12,
13,
14].
In three-phase inverters, an unbalanced condition would occur when unbalanced loads or unbalanced bridge voltages are present. Such conditions can also appear during transient responses such as a sudden change of load, though even in steady state analyses based on symmetrical components (SC), it has been concluded that ignoring magnetic coupling in three-limb transformers and three-limb inductors is not correct under unbalanced conditions [
15]. During transient responses, magnetic coupling cannot be ignored either.
SCs have been used for analyzing three-limb transformers and three-limb inductors under unbalanced conditions for many years, especially for fault situations of power systems [
15,
16,
17]. Normally, periodic three-phase variables in each circle are assumed. They are analyzed by their fundamental and harmonic SCs separately [
18]. For three-limb transformers, a duality derived model [
19] and an equivalent circuit model in the
a-b-c stationary frame have been proposed [
20]. However, such models based on SCs in the frequency domain are more suitable for analyzing slow transient responses in a power system. In inverters where transient responses are fast, the three-phase variables can no longer be treated as periodic waves. Hence they cannot be expressed by SCs.
For inverters with a three-limb transformer and three-limb inductor, to obtain optimal instantaneous closed-loop control, magnetic coupling should be considered in the dynamic models so that transient performance can be properly considered. To the authors’ knowledge, transient models in the design of instantaneous closed-loop controllers while considering the magnetic coupling has been seldom reported in literature.
A transformation known as the instantaneous symmetrical components transformation (ISCT) has been proposed that can be used in the analysis of transient responses in AC motors [
21,
22]. Its transformation matrix is similar to the symmetrical components transformation (SCT), but is performed on three-phase instantaneous variables. The transformation results in instantaneous symmetrical components (ISC), which have also been used for extracting instantaneous values or disturbances in three-phase power systems [
9,
23,
24,
25]. Because ISC-based dynamic models for three-limb transformers and three-limb inductors are simpler in formulation [
26,
27], it may also be a useful tool when magnetic coupling is taken into account in transient responses of inverters. However, it has been seldom reported in the literature.
In this paper, magnetic coupling is studied using ISCs, and we proceed as follows: First, in
Section 2, the instantaneous symmetrical component transformation is reviewed. Next, in
Section 3, a transient model for a three-phase PWM inverter is derived based on ISCs which considers magnetic coupling due to a three-limb inductor and three-limb transformer. Based on this model, in
Section 4, the transient performance of three-phase inverters is evaluated, especially considering the influence of magnetic coupling. Furthermore, for inverters with PID closed-loop control strategies, the influence between instantaneous closed-loop control and magnetic coupling is analyzed. Then, a performance analysis and controller design for a three-phase inverter with magnetic coupling is derived. Finally, in
Section 5, the results of the simulations are presented and validated with experiments and
Section 6 concludes the paper.
2. The Instantaneous Symmetrical Components Transformation
Main text paragraph. In this section, the instantaneous symmetrical components transformation will be reviewed. The instantaneous symmetrical components transformation (ISCT), introduced by Lyon, W.V. [
21,
28], is expressed as:
where α = e
j2π/3, the
xa,
xb,
xc are three-phase instantaneous variables, and
x+,
x−,
x0 are the resulting ISCs, including the instantaneous positive-sequence component (IPSC), the instantaneous negative-sequence component (INSC) and the instantaneous zero-sequence component (IZSC), respectively. The inverse transformation is expressed as:
According to Equation (1), the IZSC is a real variable and the IPSC and INSC are complex variables and are complex conjugates.
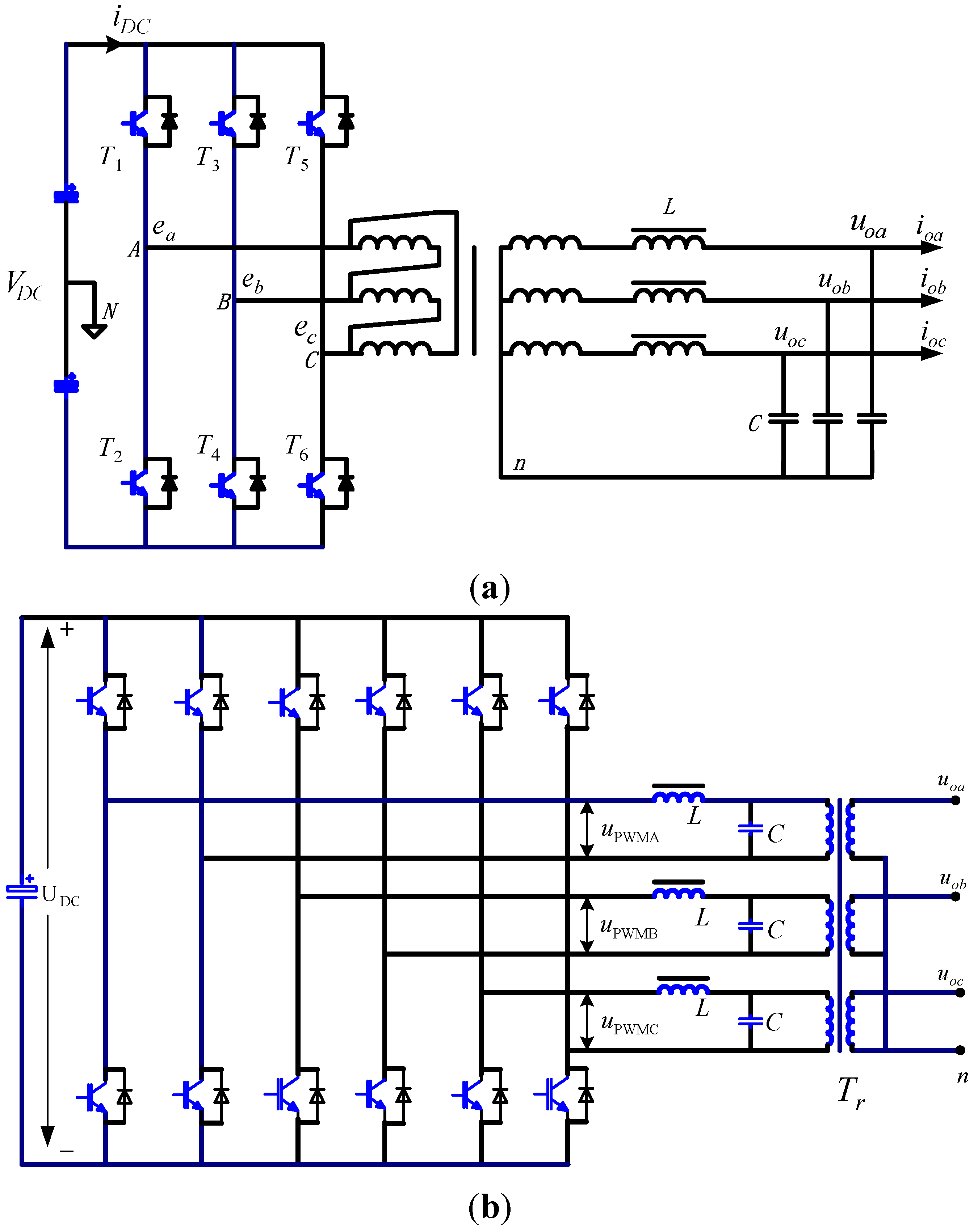
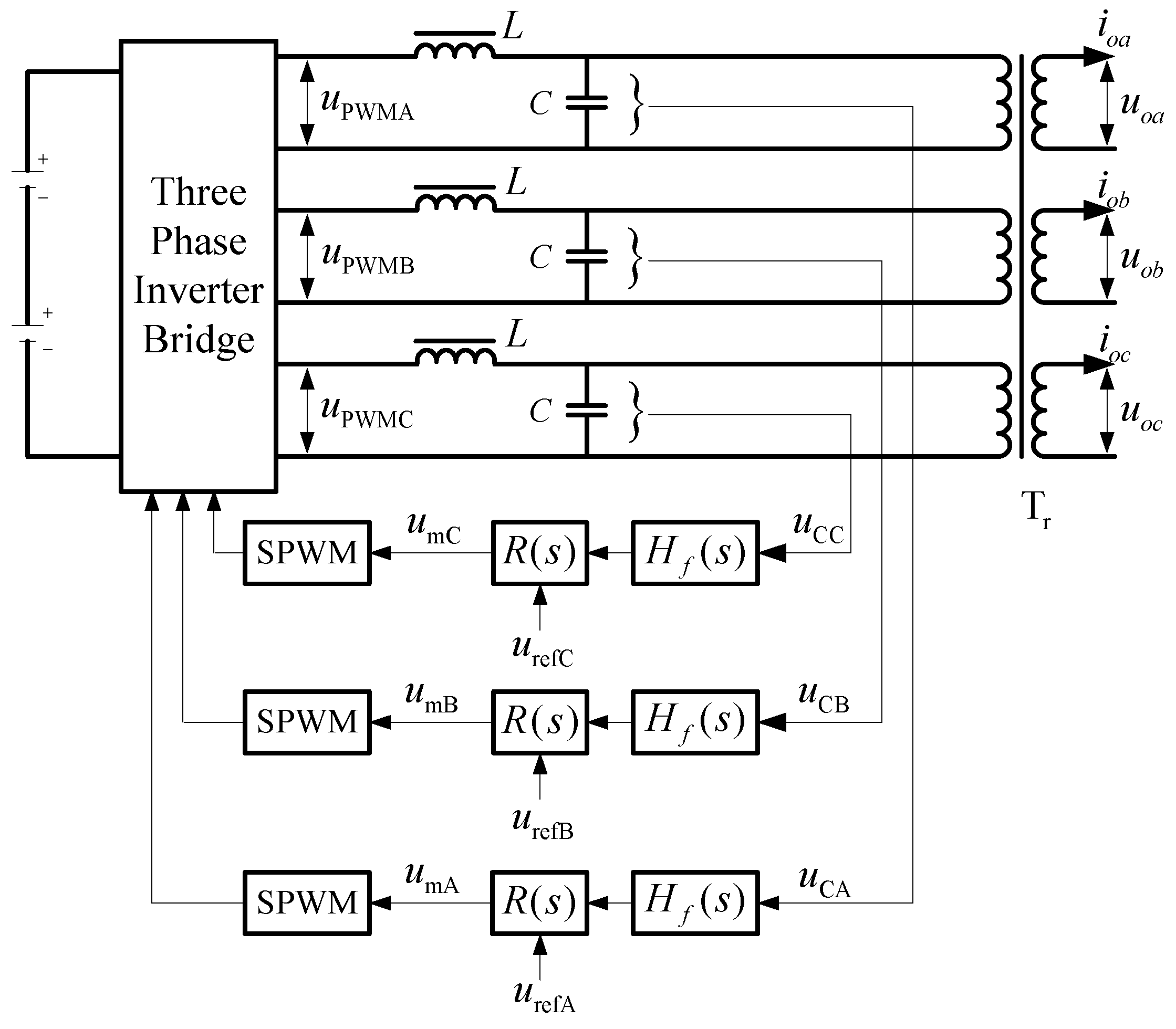
Typically, for normal three-phase, three-bridge inverters shown in
Figure 1a, no current flows in the IZSC. In contrast, we consider the three-phase full-bridge inverter shown in
Figure 1b, because the IZSC current output from the inverter bridges can flow in the three-limb inductor and three-limb transformer. Hence, the IZSC will influence the inverter and should be included in the dynamic model.
Figure 1.
(a) Three-phase three bridge inverter; (b) Three-phase full bridge inverter.
Figure 1.
(a) Three-phase three bridge inverter; (b) Three-phase full bridge inverter.
4. Transient Characteristics of Three-Phase Inverters Considering Magnetic Coupling
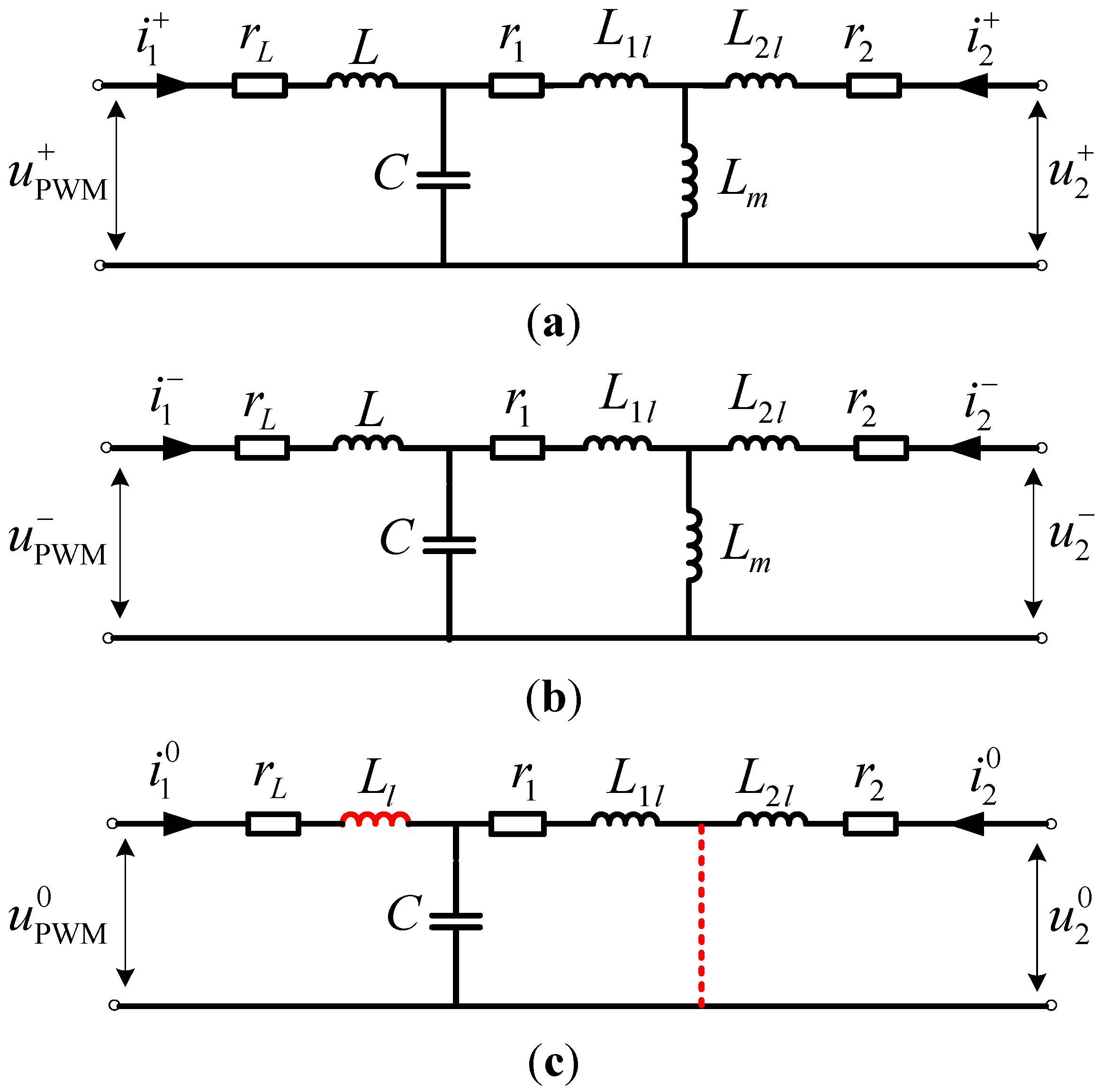
In this section, the transient behavior of three-phase inverters will be considered including magnetic coupling. To begin, in
Figure 5c, the impedance of capacitor
is given as
. If we define
and
, the parallel combination of
and
results in:
Note that at low frequencies,
, thus
. The current
is given as:
In three-wire three-bridge inverters,
does not exist; however, for inverters such as those in
Figure 1b, current
is an inherent, serious problem that should be evaluated. At low frequencies, the
,
,
,
are small, and therefore a small voltage
can result in a large current
, which may lead to over-current in power switches and shutdown of inverters.
For inverters in UPSs, it is necessary to introduce various instantaneous control strategies, such as PID and multiple feedback controls, to adapt for diverse nonlinear loads [
4,
5]. Among various instantaneous control strategies, the PID control strategy has a simple form and high robustness and is thus analyzed in this paper.
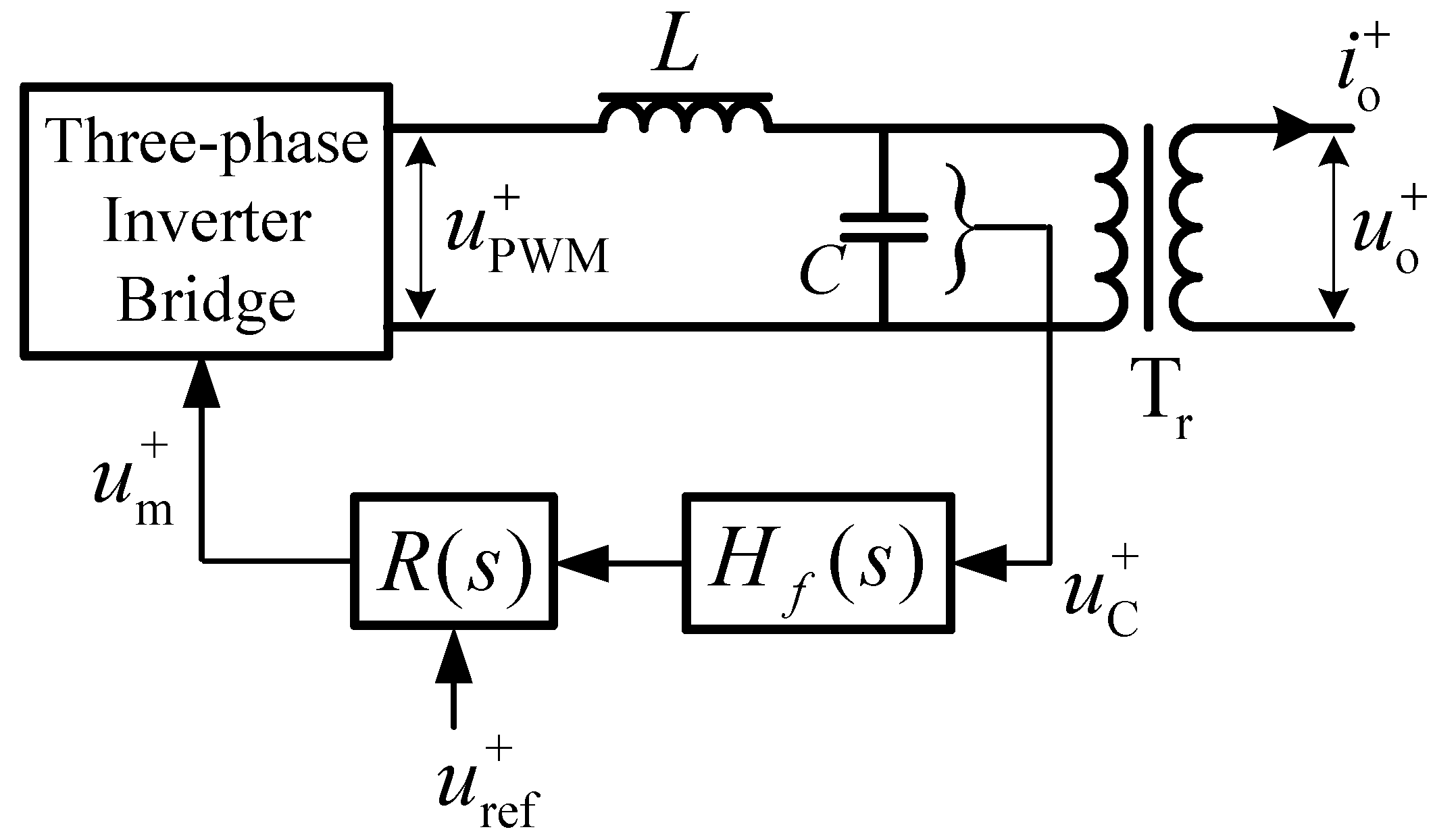
Figure 6 gives a diagram of a three-phase inverter with three PID controllers in which the voltages of the three-phase capacitor,
,
,
, are sampled. In
Figure 6,
Tr is the three-limb transformer and
L is the three-limb inductor. A PID controller
is used for each phase, which has the form:
Based on the ISC equivalent circuits in
Figure 5, the IPSC equivalent circuit of
Figure 6 is shown in
Figure 7, where
is the IPSC of the modulation signals
,
,
;
is the IPSC of the capacitor voltages
,
,
;
is the IPSC of the reference voltages
,
,
;
is the IPSC of the load voltages
,
,
; and
is the IPSC of the load currents
,
,
. For inverters in UPSs, currents
,
,
and their ISCs are treated as disturbances in the model because the diverse sets of loads for UPS are unpredictable.
Figure 6.
A three-phase inverter with PID closed-loop controllers.
Figure 6.
A three-phase inverter with PID closed-loop controllers.
Figure 7.
IPSC equivalent circuit for three-phase inverters with a PID controller.
Figure 7.
IPSC equivalent circuit for three-phase inverters with a PID controller.
Treating the transistors (see
Figure 1), typically IGBTs, as ideal switches, when the DC bus voltage is constant and the switching frequency is high enough, the inverter bridges will amply low frequency modulation signals linearly and can be modeled as an amplifier with gain
[
4,
5], given by
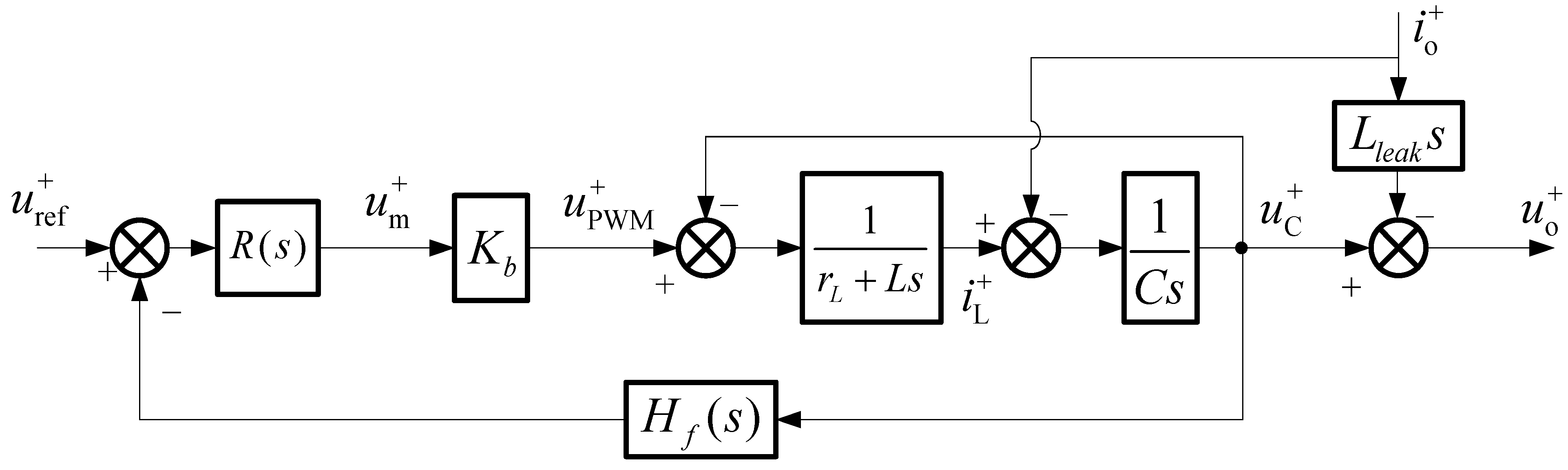
Neglecting
,
and
, the transfer function block diagram of the IPSC derived from
Figure 7 is shown in
Figure 8. The inductance
is defined as:
Figure 8.
IPSC transfer function diagram for three-phase inverters with instantaneous feedback control.
Figure 8.
IPSC transfer function diagram for three-phase inverters with instantaneous feedback control.
Hence, from
Figure 8, the IPSC transfer function is derived as:
where
and
.
Since the INSC is always the complex conjugate of the IPSC, its equivalent circuit and the transfer function all have the same forms as those of IPSC. The IZSC equivalent circuit is shown in
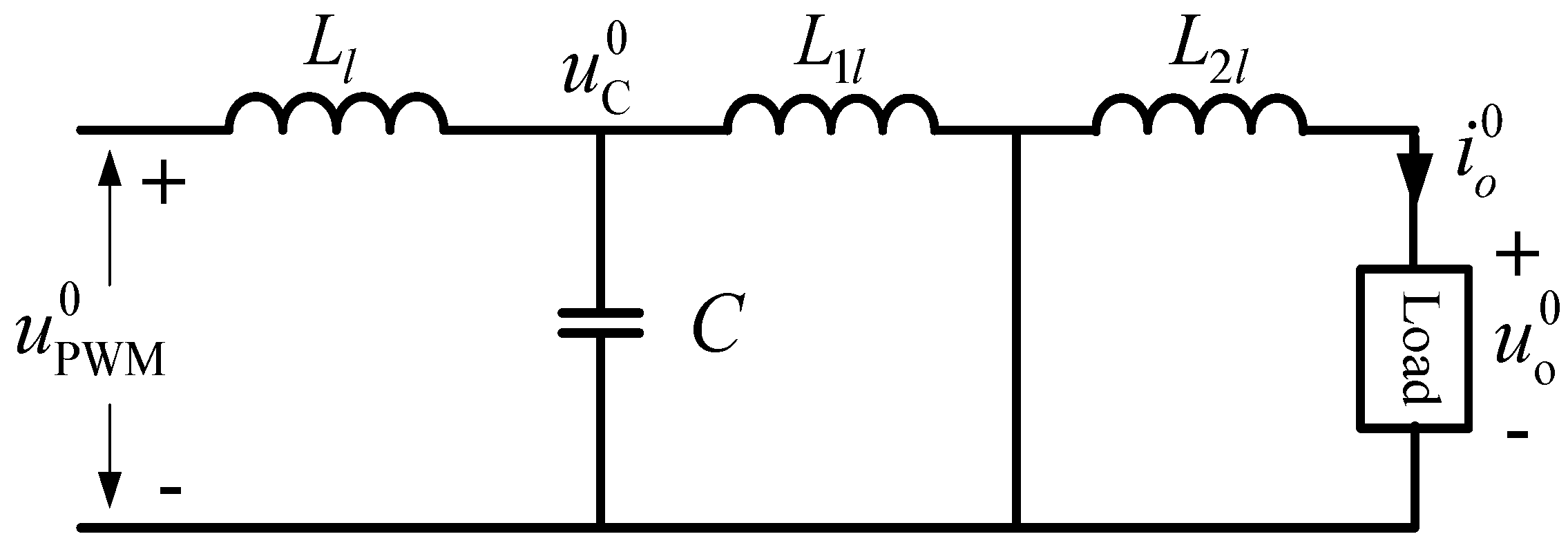
Figure 9.
Figure 9.
IZSC equivalent circuit for three-phase inverters with instantaneous feedback control.
Figure 9.
IZSC equivalent circuit for three-phase inverters with instantaneous feedback control.
From
Figure 9, the IZSC of the load voltages can be expressed as:
where the impedance
is:
Next, Equation (2) can be used to solve for the three-phase voltages of the load, as:
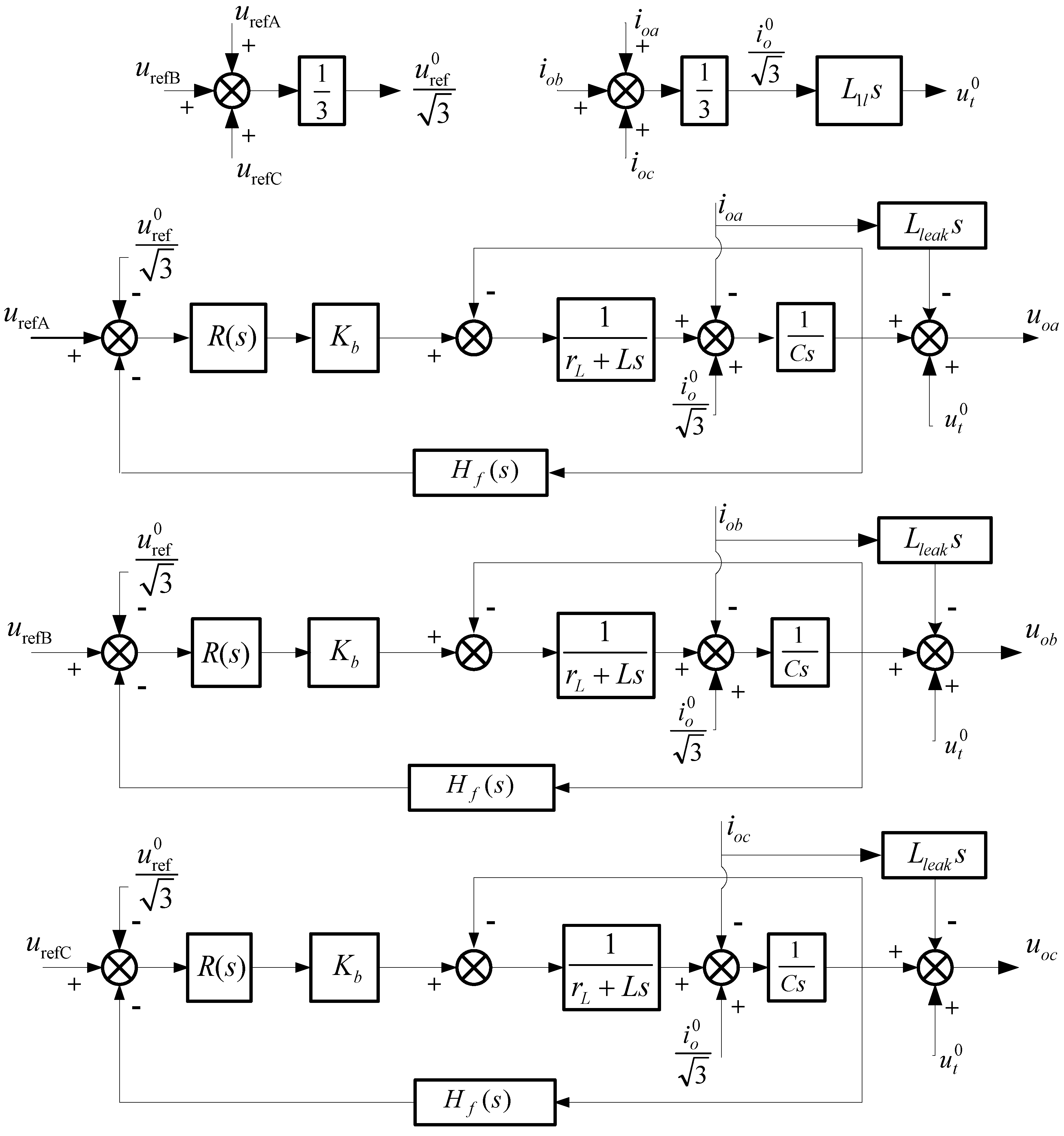
The corresponding block diagram for Equations (38)–(40) is shown in
Figure 10. It can be observed that the IZSC voltage
and current
are added as two disturbances, which influence the three-phase inverter in unbalanced conditions.
In the design of the PID controller, stability and high performance should be guaranteed while magnetic coupling exists. In a three-phase inverter, since the three-phase variables can be described by ISCs and its dynamic model can be expressed by ISC equivalent circuits, the analysis of the three-phase variables can be decomposed into the analysis of the IPSC, INSC and IZSC. In
Figure 5, the IPSC and INSC equivalent circuits are the same, and they are also the same as a single-phase inverter when magnetic coupling is neglected so that the three-phase inverter is seen as three single-phase inverters. So, at the beginning of this analysis, the three-limb transformer and three-limb inductor can be treated as three, separated single-phase transformers and single-phase inductors, and the equivalent circuits of the IPSC and INSC can be obtained naturally. Hence the analysis results for a single-phase inverter are also valid for the IPSC and INSC equivalent circuit. In contrast, the IZSC equivalent circuit is different from that of the IPSC and INSC, so it should be evaluated separately; essentially, the effect of
and
must be evaluated. Based on this conclusion, the design procedure for the instantaneous controller should include two steps:
The magnetic coupling is first neglected, and the three-phase inverter is modeled as three single-phase inverters so that the controller design can ensure the dynamic performance of the IPSC.
The voltage
and current
are then evaluated to guarantee the performance of IZSC.
For the case shown in
Figure 6,
can be designed according to the block diagram shown in
Figure 8. Next, according to
Figure 9,
should be kept zero, otherwise compensation is needed. In practice, however, keeping
is sufficient. The reference
will appear in parallel inverter systems, and the independent regulation of three phase voltages for restraining circulating current in each phase will result in considerable voltage
, giving rise to serious problems. In addition, the 3rd order IZSC harmonics due to dead zones in the drive circuits of the power switches contribute to
[
30].
Unbalanced load currents contain
, which contribute
through
according to
Figure 9. This is indeed an advantage of a three-limb transformer when compared with three single-phase transformers, because
is not significant due to small
. However, on the other hand,
can’t be regulated by instantaneous feedback controls because voltage
is bypassed by the three-limb transformer.
Figure 10.
Block diagram for a three-phase inverter with PID control considering magnetic coupling.
Figure 10.
Block diagram for a three-phase inverter with PID control considering magnetic coupling.
5. Simulation and Experiment Results
A prototype of 50 kVA three-phase inverter was built for the following experiments, which had the structure given in
Figure 1b. The three-limb transformer
Tr is used as the output transformer and the three-limb inductor
L is used as a filter. A PID controller is used for
R(
s). The parameters of the inverter and its controller are shown in
Table 1.
Table 1.
Parameters of Inverter and Controller.
Table 1.
Parameters of Inverter and Controller.
| L | C | r | L1l (per unit) | L2l (per unit) | Kb | Hf (s) | R(s) |
|---|
| 0.6 mH | 140 uF | 0.12 Ω | 2.5% | 2.5% | 53.8 | 0.019 | |
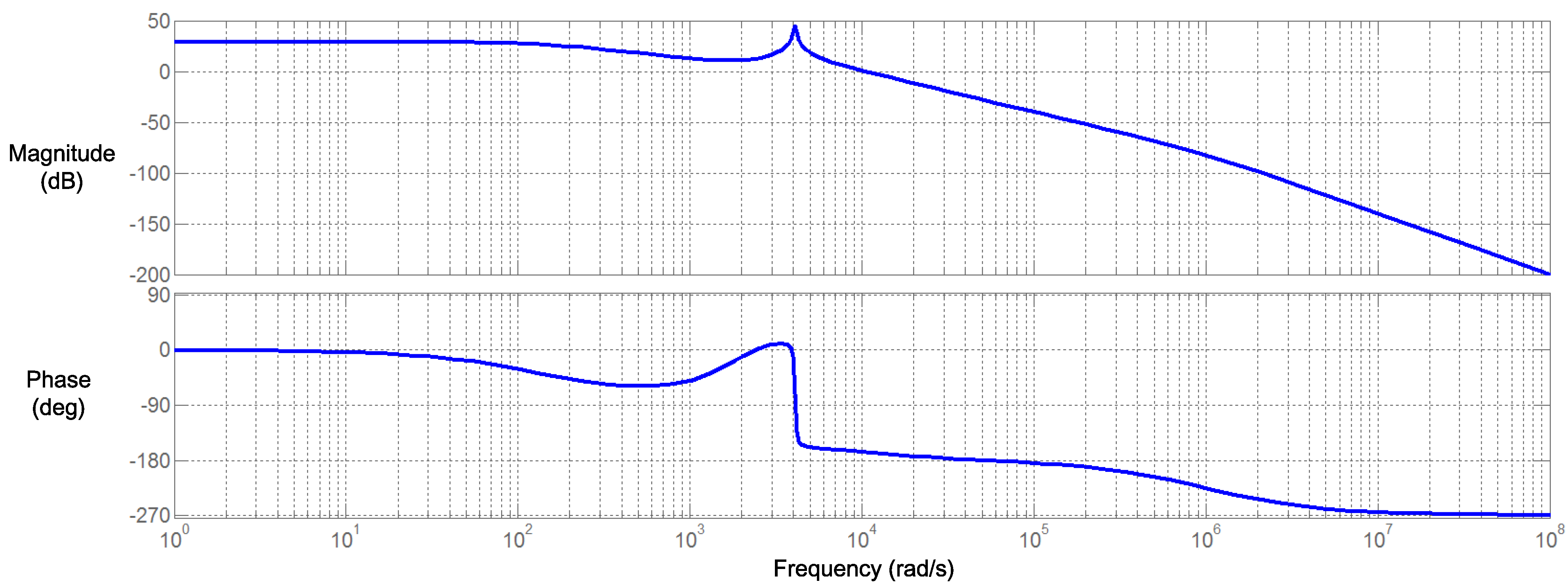
The bode diagram of IPSC is shown in
Figure 11. It can be seen that the PID controller designed for IPSC behaves good performance. Then the INSC has the same performance. However, according to Equation (36), the IZSC cannot be regulated by PID controller due to magnetic couples.
Figure 11.
Bode diagram of IPSC.
Figure 11.
Bode diagram of IPSC.
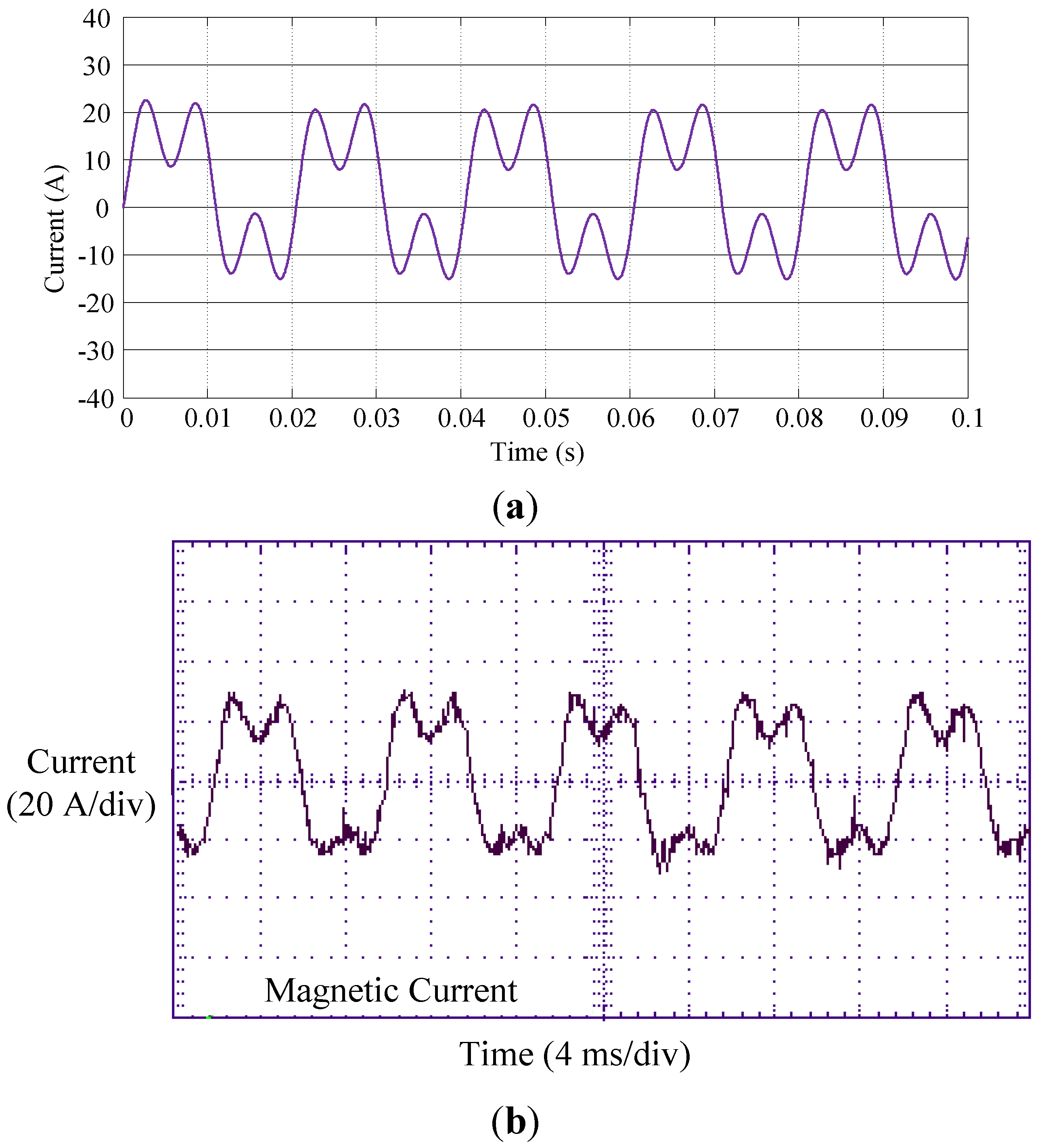
A simulation to analyze the effect of the IZSC is shown in
Figure 12a. When
, the primary side current
iA in the transformer is negligible and is not shown. The phase-shift between
and
is changed from 120° to 122.3°. The simulation shows that the current
iA is 20A, even without load. The distortion of
iA is due to dead-times of the power switches. In the experiment,
iA is measured by an oscilloscope and is shown in
Figure 12b. The experimental result is the similar to that of the simulation shown in
Figure 12a.
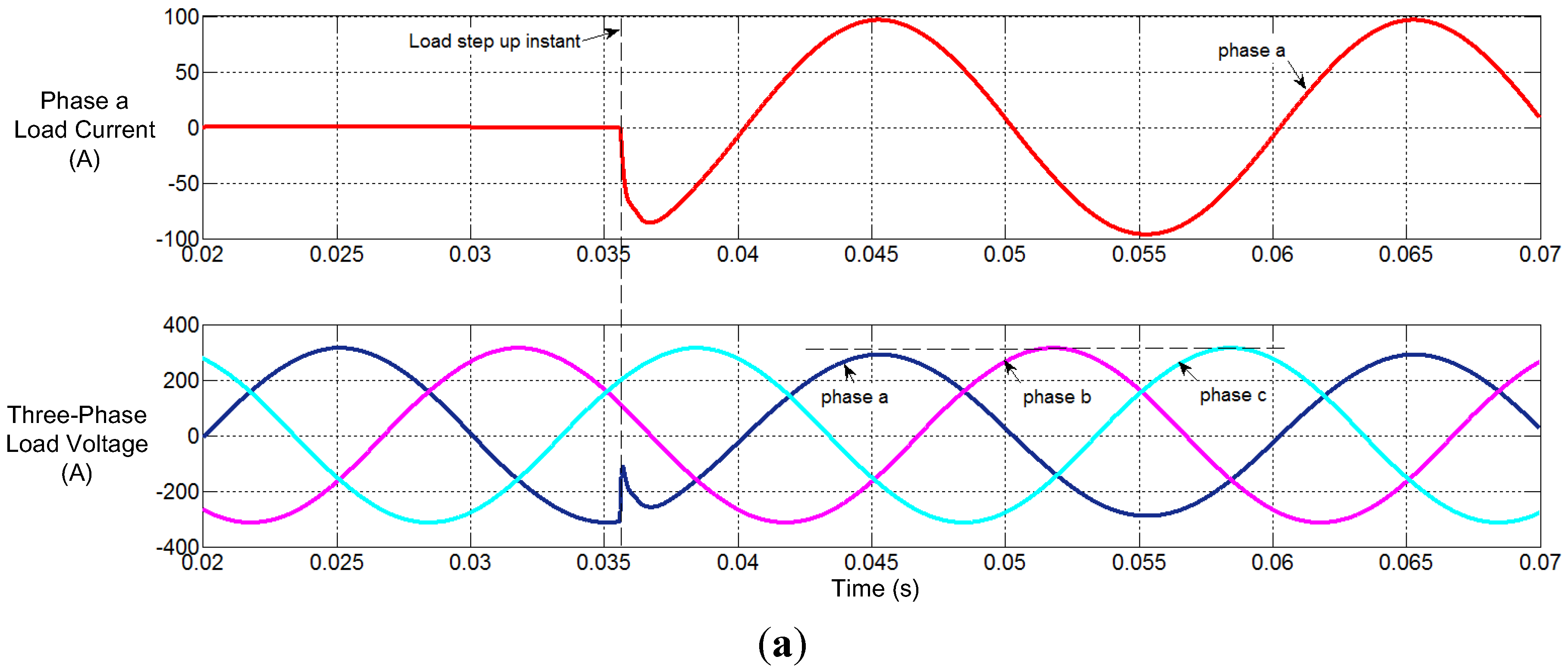
The proposed model in
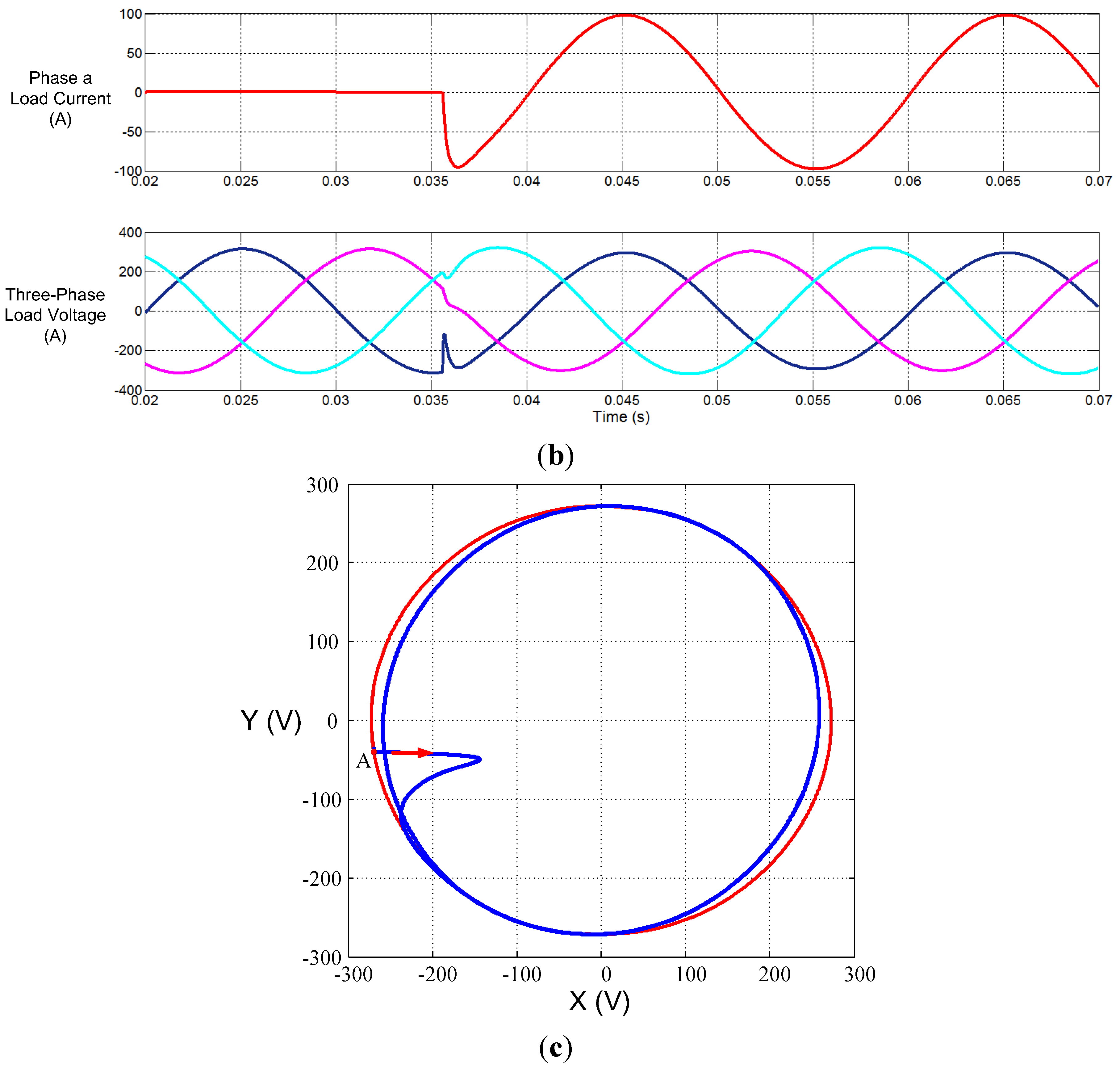
Figure 10 is also validated with a simulation incorporating an unbalanced load step-up which is realized by a step up of the resistive load during phase “a”. When the magnetic couples are neglected, the waveform of the load voltages is shown in
Figure 13a. It can be seen that, only phase “a” is influenced during step-up process. Next, the magnetic couples are considered and the waveform of the load voltages is shown in
Figure 13b. During single-phase load step-up, due to magnetic coupling, all three phases are influenced by the IZSCs. Also, due to the superposition of
, which has the same waveform as
, the voltage magnitudes of phases “b” and “c” are changed by
. They have different values as indicated by the dashed line labeled as “Line1” in
Figure 13b. The largest voltage magnitude appears in phase “c” and the lowest magnitude voltage appears in the phase “a”.
Figure 12.
Primary current of three-limb transformer in unbalanced condition: (a) Simulation; (b) Experiment.
Figure 12.
Primary current of three-limb transformer in unbalanced condition: (a) Simulation; (b) Experiment.
Figure 13.
Simulation waveforms of the three phase load voltage (single-phase load step up): (a) No magnetic couples; (b) With magnetic couples; (c) IPSC locus of load voltage with magnetic couples.
Figure 13.
Simulation waveforms of the three phase load voltage (single-phase load step up): (a) No magnetic couples; (b) With magnetic couples; (c) IPSC locus of load voltage with magnetic couples.
The corresponding IPSC locus is shown in
Figure 13c. The dot labeled as “A” denotes the moment of load step-up. Before load step-up, the locus is a circle as indicated by the thin, red line. However, after step-up, the locus changes to an ellipse due to the unbalance three-phase load voltages as indicated by the thick line.
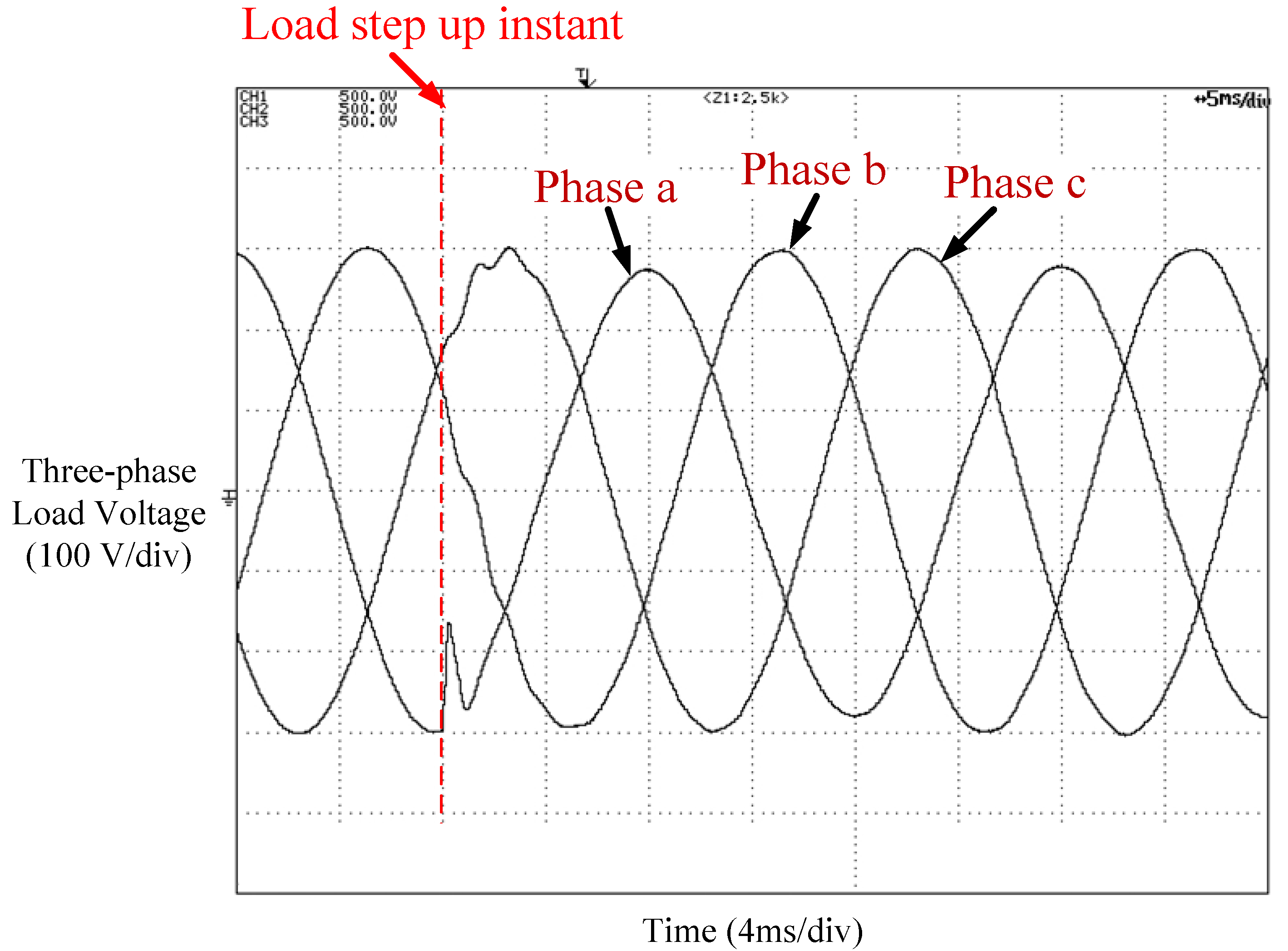
A corresponding experiment was performed also by a step-up of resistive load in phase “a”, and the corresponding waveforms are shown in
Figure 14. The waveform is similar to that of simulation, except for small oscillations in phases “b” and “c”, which are caused by the parasitic inductances and capacitance in the inverter. Unfortunately, these effects are difficult to include in the simulation.
In this example, simulation and experiment show that the influence of magnetic couples on the inverter system is acceptable even though the IZSCs are not compensated, because the incurred IZSC is small due to small
and
. However, for many applications, such as parallel inverter system,
or
are large, then the compensations of IZSCs should be considered.
Figure 14.
Experimental waveforms of three-phase load voltages (step up of single-phase resistive load)
Figure 14.
Experimental waveforms of three-phase load voltages (step up of single-phase resistive load)













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




