Development and Field Test of Voltage VAR Optimization in the Korean Smart Distribution Management System


Abstract
: This paper is a summary of the development and demonstration of an optimization program, voltage VAR optimization (VVO), in the Korean Smart Distribution Management System (KSDMS). KSDMS was developed to address the lack of receptivity of distributed generators (DGs), standardization and compatibility, and manual failure recovery in the existing Korean automated distribution system. Focusing on the lack of receptivity of DGs, we developed a real-time system analysis and control program. The KSDMS VVO enhances manual system operation of the existing distribution system and provides a solution with all control equipment operated at a system level. The developed VVO is an optimal power flow (OPF) method that resolves violations, minimizes switching costs, and minimizes loss, and its function can vary depending on the operator's command. The sequential mixed integer linear programming (SMILP) method was adopted to find the solution of the OPF. We tested the precision of the proposed VVO on selected simulated systems and its applicability to actual systems at two substations on the Jeju Island. Running the KSDMS VVO on a regular basis improved system stability, and it also raised no issues regarding its applicability to actual systems.1. Introduction
The recent global consensus on CO2 reduction and strict semi-coercive regulations have increased the demand for new renewable energy resources that cause less air pollution, making it difficult to operate the distribution system in the traditional way, in which the operator uses his own discretion during operation. Variable and uncertain outputs of new renewable energy sources cause inconstant voltages, which were negligible in the radial distribution system.
This issue has gradually increased the need for the development and operation of supervisory control and data acquisition (SCADA), automated distribution and unique distribution management systems (DMSs) [1–4]. While the existing system and a new DMS would differ in terms of the technologies that they use, the most important difference would be the way they operate: the existing system relies on the discretion of the operator, whereas the new system combines operator discretion with continuous real-time analysis and control programs. Of the many analysis and control programs, voltage-VAR optimization (VVO) is a core solution that maintains system stability and enhances operation efficiency when the system receives an input of new renewable energy.
With the increased use of distributed generators (DGs) that can control the reactive power in the distribution system, various VVO methods have been introduced. VVO methods for a distribution system, including DGs, are classified into decentralized and centralized methods. Decentralized equipment controls the voltage at the connection point or the reactive power output, using only local measurement. The loading and generating values, in general, determine the reference values of equipment in the planning phase [5,6]. In a centralized VVO method, the DMS calculates the voltage and reference values for reactive power control equipment based on real-time data from the distribution system, and the voltage and reference values are transmitted to the control equipment. The centralized VVO method is further classified into a rule-based method and a network-model-based method [7]. The rule-based method uses an operational rule based on past operational data and real-time measured data, and calculates the reference values of the control equipment. The network-model-based method uses line connections, impedance, and real-time measured data, to estimate the status information of the distribution system (e.g., the voltage, line flow, and status of control equipment), and, using the optimization method, calculates the reference values of the control equipment to optimize operation. Hence, the network-model-based VVO method requires additional applications, e.g., a status estimation program, and a power flow program. This method is more stable than decentralized and rule-based methods, and it enables economical voltage and reactive power controls.
The proposed VVO is a network-model-based method. Network-model-based methods use optimal power flow (OPF) to satisfy the conditions of system operation, and calculate the reference values of the voltage and reactive power control equipment to optimize operation [8–13]. The object function of an OPF is to minimize distribution system loss, reactive power cost, voltage variation, reactive power influx from the transmission system, or a combination of these. Various constraints can be used, such as: (1) the power flow equation; (2) voltage; (3) lines; (4) power influx from the transmission system; and (5) operation constraint of equipment.
The OPF used for the VVO problem is classified as a non-convex mixed integer nonlinear problem (MILP), because the power balance equation, a necessary constraint of the VVO problem, is non-convex and non-linear and the decision variables for the on-load tap changer (OLTC) and shunt capacitor (SC) are integers. To calculate the optimal solution of the non-convex MILP, heuristic optimization methods, such as the generic algorithm and the ant colony system mechanism, were used in [8–11]. However, because the size of the distribution system and the number of decision variables substantially affect the time to calculate an optimal solution, such methods are inappropriate for the real-time VVO of a large system that includes many voltage and reactive power control components [12]. In [12,13], despite the risk of being unable to find a global optimal solution, the deterministic optimization method that guarantees a deterministic runtime was used to find an optimal solution for OPF.
In this paper, we summarize the development and demonstration result of the Korean Smart Distribution Management System (KSDMS) VVO. The KSDMS VVO improves the manual operations of existing distribution management methods, and provides a solution that can manage all control equipment on the distribution system at a comprehensive system level. Section 2 discusses the background of the introduction of the KSDMS VVO. Section 3 includes a theoretical summary of the development of the KSDMS VVO, and the results of its function test. Section 4 discusses a field demonstration of the developed VVO.
2. Voltage Control of the Existing Automated Distribution System
The Korean distribution system, covering from the secondary line of the main transformer (MTR) of the substation (154/22.9 kV) to the pole and pad transformers that supply power to end users (high and low voltages), is managed and operated by the Korea Electric Power Corporation (KEPCO). Under the situation of a high proportion of compactly loaded mid- to short-range lines (in large and mid-to-small cities), the absolute aim of the Korean distribution system is the efficient management of the system and reduction of power outage time. At early stage, the operators of the Korean distribution system introduced a distribution automation system that allows remote failure recovery and load transfer. Currently, the total distribution automation system (TDAS) developed in 1998 is used to manage the Korean distribution system. The TDAS is now installed and operated at 190 distribution centers, and 40 metropolitan distribution centers. Of the total 127,000 line switches, about 35% are automated, and remotely controllable and measurable [13]. The main functions of the TDAS, using the automated switches, include distribution line monitoring, failure removal, and power outage recovery. In 2012, the TDAS recorded an annual power outage of 0.115%, and an average outage time of 3.2 min per customer.
Although each automated switch and other equipment measured the voltage or flow, and transmitted it to the central equipment, errors frequently occurred, because the transmitted data was poorly synchronized, or the measurement itself was incorrect. However, incorrect voltage measurement did not affect the TDAS as much, because its purpose remained as failure recovery, and its radial structure operated on actual measurements at several distribution centers. KEPCO has performed actual voltage measurements at several distribution centers biannually in summer and winter, rather than monitoring it from the center, and they have installed taps or series voltage restorers (SVRs) on the ground transformers, in the areas where voltage drop occurs frequently.
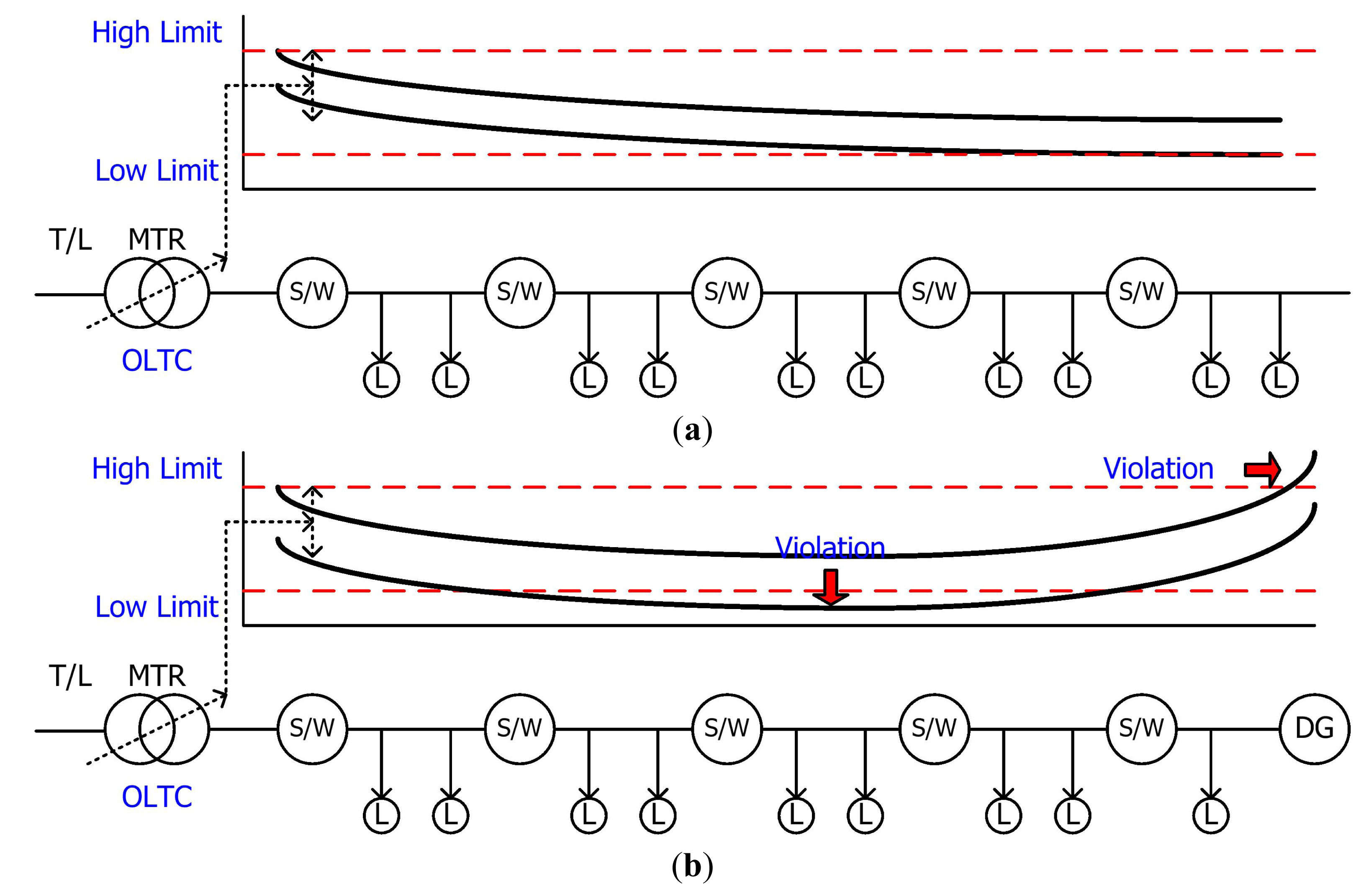
However, the recent increase in power influx from the DG has threatened the stability of TDAS, causing a voltage problem: the existing method for controlling the voltage, i.e., actually measuring it at distribution centers, is inadequate to handle this power influx, which causes output fluctuations and power oversupply at the distribution centers. In addition, the OLTC on a MTR fails to consider the effect of DGs. As shown in Figure 1, if an OLTC tap is lowered to avoid overvoltage, undervoltage occurs; and conversely, raising the tap to resolve the undervoltage of the line causes overvoltage at the DG connection point.
As a centralized solution to the voltage problem, the TDAS has been improved with integrated volt/VAR control (IVVC) [14,15]. The function of IVVC is as follows:
The problems of IVVC are listed as follows:
- (1)
IVVC uses a combined optimization method, and calculates flows repeatedly for a solution. For example, provided that a line is installed with an OLTC and SVR, each of which includes 20 taps, it performs a total of 400 power flow calculations for an optimal solution, based on Equation (1), consuming a lot of time. In general, the number of buses on a system reaches several thousand (e.g., on the Jeju Island, the original system has approximately 8000 buses, and the reduced system has 5000 buses), and the number of the distribution lines (D/Ls) reaches over 100. IVVC is inappropriate for the continuous real-time control of a large distribution system.
- (2)
IVVC controls step-control equipment (the transformer's tap, SVR and SC), but is unable to consider continuous control variables, including the static VAR compensator (SVC), static synchronous compensator (STATCOM), DG P/Q, and power factor.
- (3)
IVVC calculates power drops only, and its calculation could be inaccurate, because it uses only a voltage generator for the DG.
A comparison of the conventional IVVC of Korea DAS with the proposed VVO is summarized in Table 1. As can be seen in the table, IVVC used a combinatorial optimization method, whereas VVO used an SMILP method. The existing IVVC is a structure that ends when a voltage violation is solved by performing repetitive load flow calculations on the state with the change of control variables. Therefore, numerous states can exist according to the number of control variables and the initial value, and the computing time is also very long. On the other hand, the proposed VVO method is an optimized method that solves problems by using LP formulas, and thereby the number of cases in that state is relatively small and the computing time is short. Furthermore, IVVC uses a load flow calculation method that computes only the voltage magnitude. It analyzes only the voltage violation issue, and cannot analyze the issues caused by DG connection. On the contrary, VVO can analyze a DG influx issue because it calculates both voltage and phase. In the case of control variables, IVVC considers only discrete variables, whereas VVO considers both discrete and continuous variables.
To overcome the major technical problems of the TDAS, the KSDMS was implemented from June 2009 to May 2013, as described in Table 2 [13]. The main technical objective of the development system was to solve the aforementioned problems of the existing DAS. In order to achieve this objective, the system was developed as summarized in Table 2.
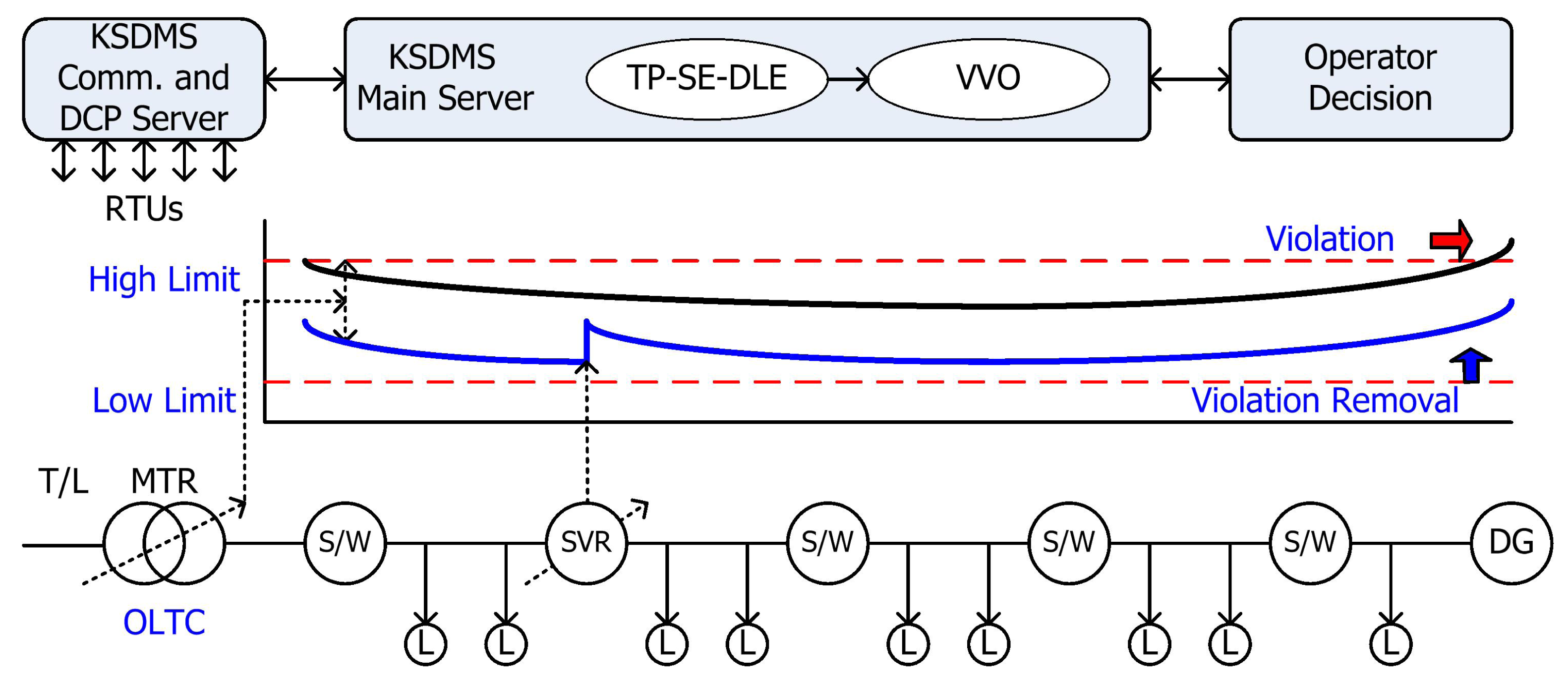
In order to increase the receptivity of the DG, the objective was to change the existing passive distribution network into an active distribution network. To this end, there has been accurate understanding of the system status and, on this basis, application programs have been developed for real-time system operation. Figure 2 shows the concept of the active distribution network. As shown in Figure 2, the status of a distribution node is transferred to the operation server as it is gathered by the communication devices and Data Communication Server (DCP). The operation server determines the current status using the real-time mode application program, as well as the voltage violation, thereby determining the solution for the violation using all the available control resources (MTR Tap and SVR). According to the preset condition of the operators (automatic control or operator setup), the solution is delivered to the site device.
Table 3 shows the structure and characteristics of the application program of KSDMS. An application program, platform, and database (DB) structure have been developed for prompt implementation in a large distribution system.
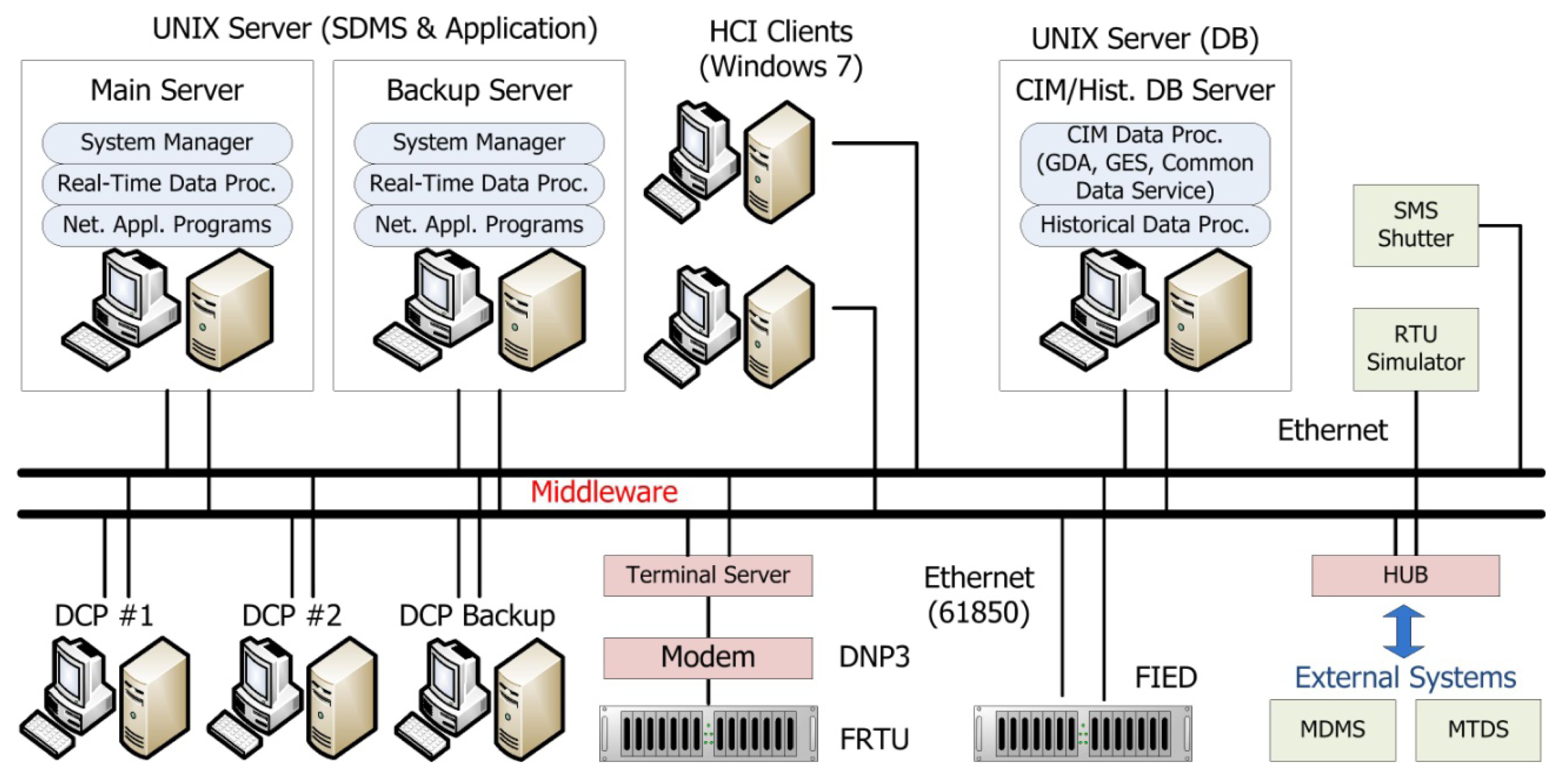
Figure 3 shows the platform structure for real-time system analysis and control. As shown in this figure, the structure of the KSDMS platform is similar to that of a small-size energy management system (EMS). The configuration of the KSDMS platform consists of an operation server, which is responsible for system operation; a DB server, which manages the DB; and a DCP server, which is responsible for data communication with the terminal devices and the operator's PC. The operation server and the DCP server were redundantly configured as 1:1 and 1:n, respectively, and all the operation data were backed up in the external hard disk in real time, therefore, fast operation can be restored during server failover.
3. Development of the KSDMS VVO
The purpose of the KSDMS VVO, a real-time mode application of the SDMS, is to calculate the reference values of voltage and reactive power control equipment, which minimize the active power loss and satisfy the operational constraint of the distribution system, based on the status information (e.g., system topology, voltage, line flows, etc.) calculated by other applications (the topology processor, state estimator, and real time power flow). The operational constraints of a distribution system are the bus voltage, line flows, and power factor of the MTR flow.
The control equipment of the KSDMS VVO includes the OLTC, SVR, SVC, SC, shunt reactor (ShR), and DG, where the output of reactive power is controlled only for the DG. The KSDMS VVO, in general, uses only the SVC and DG to minimize the loss of effective power. If a violation occurs in the distribution system, the KSDMS VVO minimizes the cost of switching operations of all control equipment, and calculates the loss-minimizing reference values of the DG and SVC, based on the reference values of the control equipment that can resolve the violation.
The KSDMS VVO provides system operators with the following additional information:
- (1)
Estimated status of the distribution system: The KSDMS VVO estimates status information of the distribution system (voltage, line flow, and power factor of the MTR flow), based on the reference values of the voltage and reactive power control equipment, as if they were actually applied to the system. The system operators, based on the estimated information of the distribution system, can determine whether the reference values calculated by the KSDMS VVO are applied to the system. The estimated information of the distribution system can be used to detect errors in the network model. That is, if the difference between the estimated information and the actual information exists after the calculated reference values are applied, that indicates an error in the network model.
- (2)
Emergency level: If a violation occurs in the system, the KSDMS VVO calculates an emergency level that indicates the magnitude of the violation. An emergency level, based on the operational constraints of the system, is classified as a voltage emergency level, line flow emergency level, or power factor emergency level. If the violation can be resolved through the voltage and reactive power control equipment, the emergency level is zero. If not, the emergency level starts from a positive integer, where a higher integer indicates a higher emergency level. From the emergency level, the operators can determine whether to ignore the violation, or take an additional measure, e.g., an active power curtailment of the DG, or network reconfiguration.
3.1. Reference Values of Control Equipment in the Optimization Process
Voltage and reactive power control equipment require various reference values depending on their operation modes. The use of all of the reference values as the decision variables in the optimization process could increase the complexity of the program. The KSDMS VVO resolves this problem by defining a single decision variable per piece of control equipment, independent of the operation mode. The reference value of the actual operation mode is calculated in the last phase of the KSDMS VVO by using the decision variable from the optimization process. Table 4 summarizes the operation modes of equipment, reference values by operation modes, and decision variables used in the optimization process.
3.2. Optimization Process of the KSDMS VVO
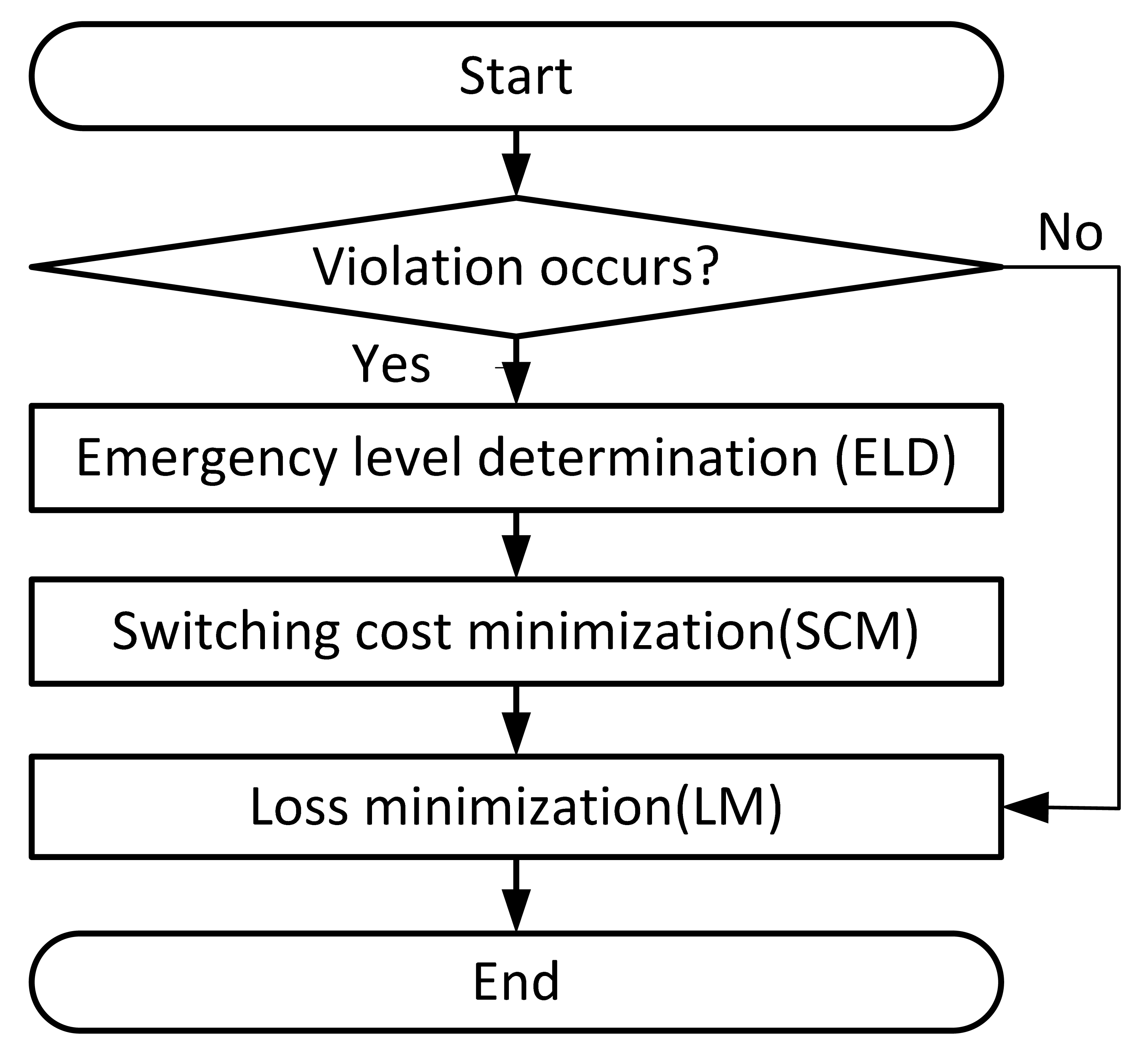
Since switching of the mechanical switch-based devices, OLTC, SVR, SC and ShR, decreases their life time, not only the active power loss but also their switching cost should be considered to improve the efficiency of the distribution system. However, it is impossible to compare the switching cost directly to the power loss cost in the real-time application. In the proposed VVO, the mechanical switch based devices are only used to resolve a violation and the other devices are used both to resolve a violation and to reduce the active power loss. The KSDMS VVO uses three main modules to optimize voltage and reactive power, and the function of each module is as follows:
- (1)
Emergency level determination (ELD): ELD is initiated only when a violation occurs, and calculates an emergency level, and the range of the following operational condition of the distribution system.
- (2)
Switching cost minimization (SCM): SCM minimizes the cost of operating switch-based equipment, using all of the voltage and reactive power control equipment.
- (3)
Loss minimization (LM): LM minimizes losses, using the DG and SVC.
Figure 4 shows the execution of each module based on the occurrence of a violation. In the case of a violation, ELD, SCM, and LM are executed sequentially. LM is only executed when no violation occurs.
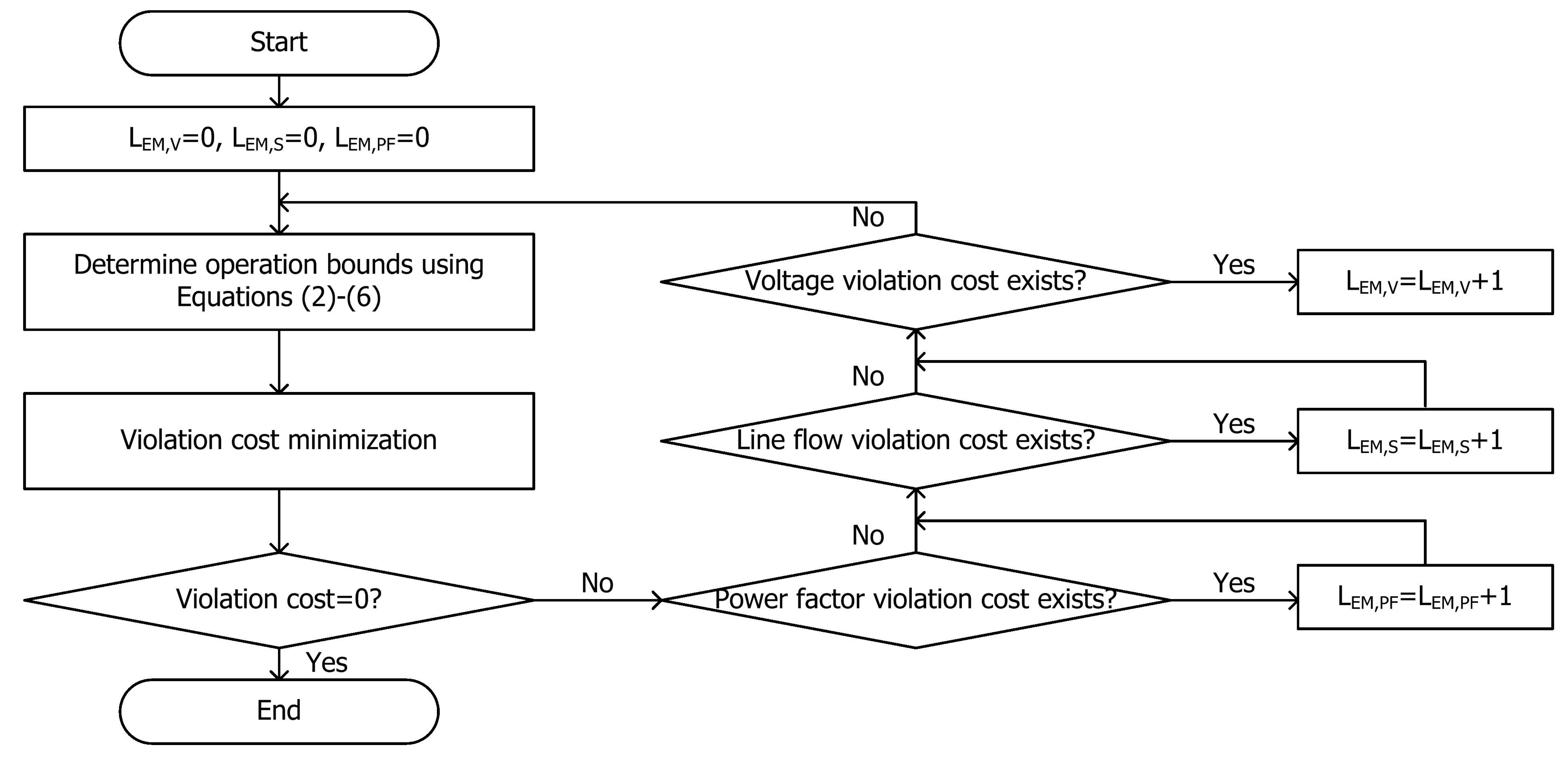
3.2.1. ELD
The voltage emergency level (LEM,V), line flow emergency level (LEM,S), and power factor emergency level (LEM,PF) are indexes indicating the magnitudes of voltage, line flow, and power factor violations, respectively. Maximum and minimum operational conditions, depending on the emergency level, are as follows:
If the emergency level is 0, the operational condition of the distribution system is normal, and the range of the condition increases, with the increase of the emergency level.
Using the violation cost minimization (VCM), ELD evaluates whether the reference values of the control equipment that can satisfy the operational constraints given by Equations (2)–(6) according to the emergency levels that exist. The VCM is an OPF to minimize a violation cost as follows:
If reference values of the control equipment that can satisfy the operational conditions exist, the minimized violation cost is zero; otherwise a positive integer is assigned. Each violation flag is calculated as follows:
Figure 5 shows how an emergency level is calculated using VCM. The initial emergency level is set to zero, and the following calculations are repeated. Equations (2)–(6) calculate the ranges of the operational conditions of each emergency level, followed by an execution of VCM. A violation cost of zero means that the reference values satisfy the operational conditions, defined by the corresponding emergency level, exist; and then, ELD ends. If the violation cost is not zero, the emergency level of the violation is increased by one level, and another calculation is initiated to determine operational conditions.
3.2.2. SCM
The SCM calculates the reference values that minimize the costs of switch-based control equipment (OLTC, SVR, SC and ShR), by solving problems the following OPF:
3.2.3. LM
The LM uses OPF to calculate the reference values of DG and SVC that minimize loss of effective power (PLoss). The functions of OPF are as follows:
For constraints, Equations (17) and (19)–(21) are used. The normal operational conditions are used if no ELD was initiated.
3.2.4. Solution Optimization Methods
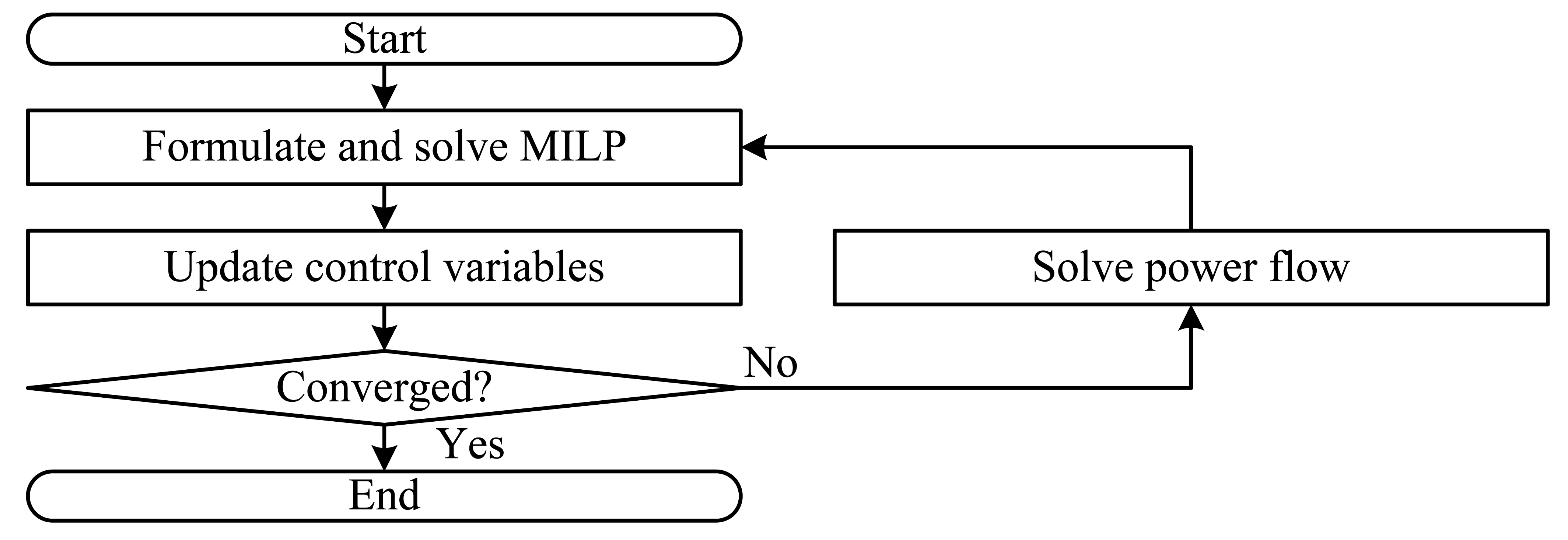
The OPF problems used in ELD, SCM, and LM are non-convex MINLP problems. An optimal solution for a non-convex MINLP problem can be found by either the heuristic method or the deterministic method. The heuristic method can find a global optimum value, but a large number of decision variables substantially increase the time required to calculate an optimal solution. This method is inappropriate for the KSDMS VVO, a real-time application that needs to calculate the reference values of the control equipment within a limited time [16,17]. Therefore, we adapted the sequential mixed integer linear programming (SMILP) method as shown in Figure 6, a deterministic method, to find the optimal solution of the OPFs. With the SMILP method, the global optimal solution may not be found, but a solution that reduces the value of the object function can be found within a limited time.
In the SMILP, the state variables and control variables are independently determined by solving the power flow and the MILP, respectively. The first step of the SMILP is to formulate the MILP by linearizing the object function and constraints at the operating state given by the power flow. It is noted that the power balance constraint, Equations (8) and (17), and state variables are not included in the formulated MILP, because the state variables satisfying the power balance constraints are determined by the power flow. And after, the MILP is solved by using the simplex method and the branch and bound method [18]. The control variables, references for the voltage and reactive power control devices are updated from the solution of the MILP. These procedures are repeated until the convergence criterion is satisfied.
There are three core functions in the SMILP: power flow, MILP formulation, and update of the control variables. In the proposed VVO, the Newton-Raphson based three-phase power flow method is adopted. The methodologies for formulating the MILP and updating process of the control variables are summarized as follows.
If we define the decision variable of the MILP, Δy, as the incremental terms of the decision variables of the original OPF (i.e., Δy = [Δu, Δv]t for VCM and Δy = Δv for the LM), the MILPs for the VCM and the LM can be formulated as the following standard form by using the equations presented in [19]. Then, the chain rule becomes:
For the SCM, the decision variable ui is divided into three terms to linearize the object function with an absolute operator, Equation (16), as:
Since one of ui+ and ui− must be zero, the absolute operator in the object function can be removed. Thus the OPF for the SCM can be formulated as a MILP with the decision variable given by:
Since the control variables of the LM, reactive power references of DGs and SVCs, are not integer, for updating method of control variables in the LM, a simple method using a step size is adopted. Initially, all step sizes are set to one. The proposed method consists of the following two steps:
- (1)
At the nth iteration, the step size corresponds to the control variable yi, si, is determined from the corresponding solution of the MILP at the previous iteration and the current iteration, Δyi,n−1 and Δyi,n. If the sign of Δyi,n−1 and Δyi,n are different, it means that the minimum value exists between the solution calculated at the previous and the solution that will be calculated at the current step of the SMILP. Therefore, the step size is reduced, i.e., if Δyi,n−1 × Δyi,n < 0, then si = si/2. Otherwise, the step size does not adjust.
- (2)
Using the adjusted step size, si, and the solution of the MILP, Δyi,n, the control variable, yi, is updated as:
This control variable updating method cannot be used for the VCM and the SCM, because some of the control variables are integer variables. In order to determine the updating method for the VCM and the SCM, the cause of a numerical oscillation should be analyzed. Since the power balance constraint is not included in the MILP, the MILP for the VCM consists only the linearized object function of the original object function Equation (7) and the minimum and maximum constraints of the control variables Equations (9) and (10). Unfortunately, a numerical oscillation can be caused by the linearization of the object function. To prevent a numerical oscillation, the control variables are updated as following processes:
- (1)
The optimal value of the object function of the MILP is saved at fcon.
- (2)
The control variables are updated using the solution of the MILP:
- (3)
The power flow is executed using the update control variables. And the exact violation cost is calculated by using Equation (7).
- (4)
If the calculated violation cost is less than the violation cost calculated in the previous step of the SMILP, then the control variable updating procedure is ended. Otherwise, go to Step 5.
- (5)
If the violation cost is increased, it means that the minimum violation cost exists between the solutions of the previous step of the SMILP. Then, the solution updated by Equation (29). The control variables are restored to those calculated in the previous step of the SMILP:
- (6)
In order to prevent large changes of the control variables cause the increased violation cost, the minimum value of the object function is limited as follows. The minimum value of the object function is reduced as:
After, the following constraint is added to the MILP formulations:- (7)
The modified MILP is solved and the decision variables obtained is saved at Δyi,n, and after, go to Step 2.
For the redefined decision variable as Equation (26), the object function of the SCM becomes a linear function. Thus, there is no numerical oscillation due to the linearization of the object function. However, a numerical oscillation can be caused by the linearization of the constraints, because the constraint of the SCM includes functions of the integer values unlike the VCM. To prevent the oscillation, the control variables are updated as following processes:
- (1)
The control variables are updated using the solution of the MILP:
- (2)
The power flow is executed using the updated control variables. Using the results, the constraints of the original OPF given by Equations (20)–(22) are examined.
- (3)
If all constraints are satisfied, the control variable updating procedure is ended. Otherwise, go to Step 4.
- (4)
The control variables are restored to those calculated in the previous step of the SMILP:
- (5)
In order to prevent large changes of the control variables cause the violation of the constraints, the upper bounds of the linearized constraints that are not satisfied are modified as follows:
- (6)
The modified MILP is solved and obtained decision variables is saved at Δyi,n, and after, go to Step 1.
3.3. Calculation of Reference Values
As shown in Table 3, because the actual reference values of the OLTC, SVR, SVC and DG could differ from the reference values obtained in the optimization process, the reference values from the optimization process are used to calculate the appropriate reference values for the actual operation mode. When the latter is the case, the KSDMS VVO uses flow calculations to calculate status information of the distribution system (bus voltage, line flow, etc.). The result of this calculation, combined with the reference values from the optimization process, is applied to the calculation of the reference values for the actual operation mode.
3.3.1. Voltage Reference for the OLTC and SVR
The VAR mode-operating OLTC and SVR consist of a line drop compensator (LDC), and a voltage relay. The LDC estimates the voltage of the central loading point, using the measured voltage (Vm), current (Im), and equivalent impedance between the equipment and the central loading point (Rc + jXc):
If the estimated voltage remains above the voltage range for a certain time, the voltage relay changes the tap position:
The voltage relay increases the tap position if |Vesti| falls below the minimum (Vref − VDB), and decreases if it is over the maximum (Vref + VDB).
For applying the reference values from the optimization process, the estimated voltage of the central loading point from the LDC is calculated as follows:
Depending on the reference value of the tap position (tref) in the optimization process and the tap position (t0) prior to initiating the KSDMS VVO, Vref needs to satisfy the following conditions to have the tap position change to tref:
- (1)
tref = t0: to maintain the same tap position when the voltage changes due to operations of other control equipment, the estimated voltage on the central loading point should remain between the maximum and minimum values of the voltage control band:
- (2)
tref > t0: to increase the tap position to tref, the minimum value of the voltage control band should remain smaller than the estimated voltage of the central loading point when the tap position is tref; and larger, when the tap position is tref − 1. When the tap position is tref − 1, the estimated voltage is the step size (ts) of the tap changer and closes to |Vesti(u,v)| − ts. Hence, Vref needs to satisfy the following condition:
- (3)
tref < t0: to reduce the tap position to tref, the maximum value of the voltage control band should remain larger than the estimated voltage of the central loading point, when the tap position is tref; and smaller, when the tap position is tref − 1:
Because there are numerous values of Vref that satisfy the above conditions, the KSDMS VVO defines the average value of the maximum and minimum values of Vesti as Vref:
- (1)
tref = t0:
- (2)
tref > t0:
- (3)
tref < t0:
3.3.2. Voltage Reference for SVC
The operation mode of SVC is classified as either the constant voltage control mode or the reactive reverse voltage (Q − V) droop control mode. For the constant voltage control mode, the magnitude of the positive sequence voltage (Vcon_posi) of the voltage control point determines the voltage reference value of the SVC:
For operation on the Q − V droop control mode, the relationship between reactive power output (Qout) of the SVC and the voltage is as follows:
The voltage reference value of the SVC on the Q − V droop control mode is calculated, based on the reference value (Qref) of the reactive power of the SVC earned from the optimization process as follows:
3.3.3. Voltage and Power Reference for DG
If the DG is in the constant voltage control mode, the voltage reference value for the DG is given a positive sequence voltage of the voltage control point:
If operated in the constant power factor mode, the power factor reference value of the DG is calculated using the reactive power reference value (Qref), and the effective power output (Pout) that was determined from the optimization process, as follows:
If PFref is a negative, this means a leading power factor; and if it is a positive, this means a lagging power factor.
4. Performance Verification of the KSDMS VVO
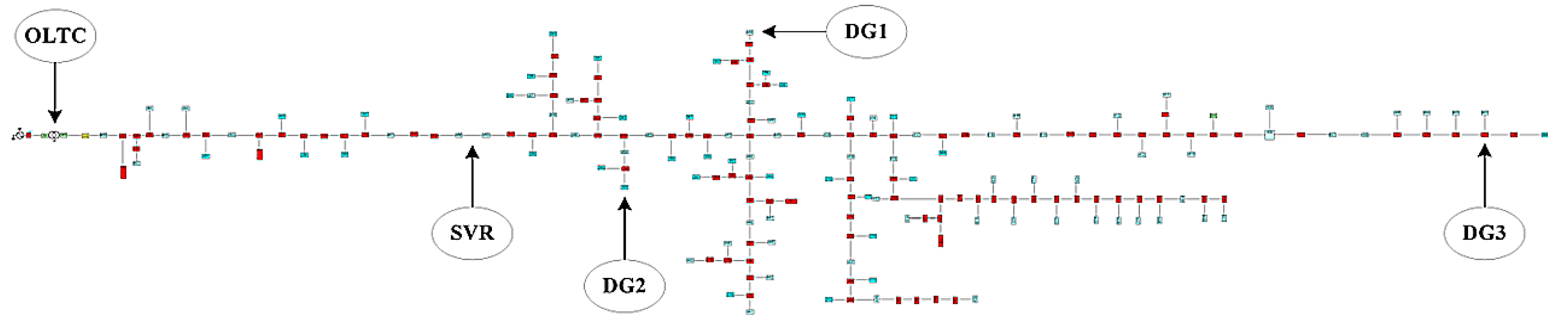
To verify the function of the developed VVO, we carried out case studies, using a K-SDMS simulator. The test system was the Songdang D/L connected to the Seongsan Substation on the Jeju Island in Korea. To analyze the control effect of the DG, we added three DGs, as shown in Figure 7. The active power output of each DG was 2.7 MW, the reactive power control mode was the power factor control mode, and its control ranged between leading 0.9, and lagging 0.9.
Table 5 shows details of the OLTC and SVR used in the simulation.
We performed three case studies to analyze the control effect of the DG, in terms of the loading, and whether the DG is controlled by the VVO or not:
- -
Case 1: the total loading was 7.92 + j3.19 MVA, and VVO controlled all of the DGs.
- -
Case 2: the total loading was 1.32 + j0.53 MVA, and VVO controlled none of the DGs.
- -
Case 3: the total loading was 1.32 + j0.53 MVA, and VVO controlled all of the DGs.
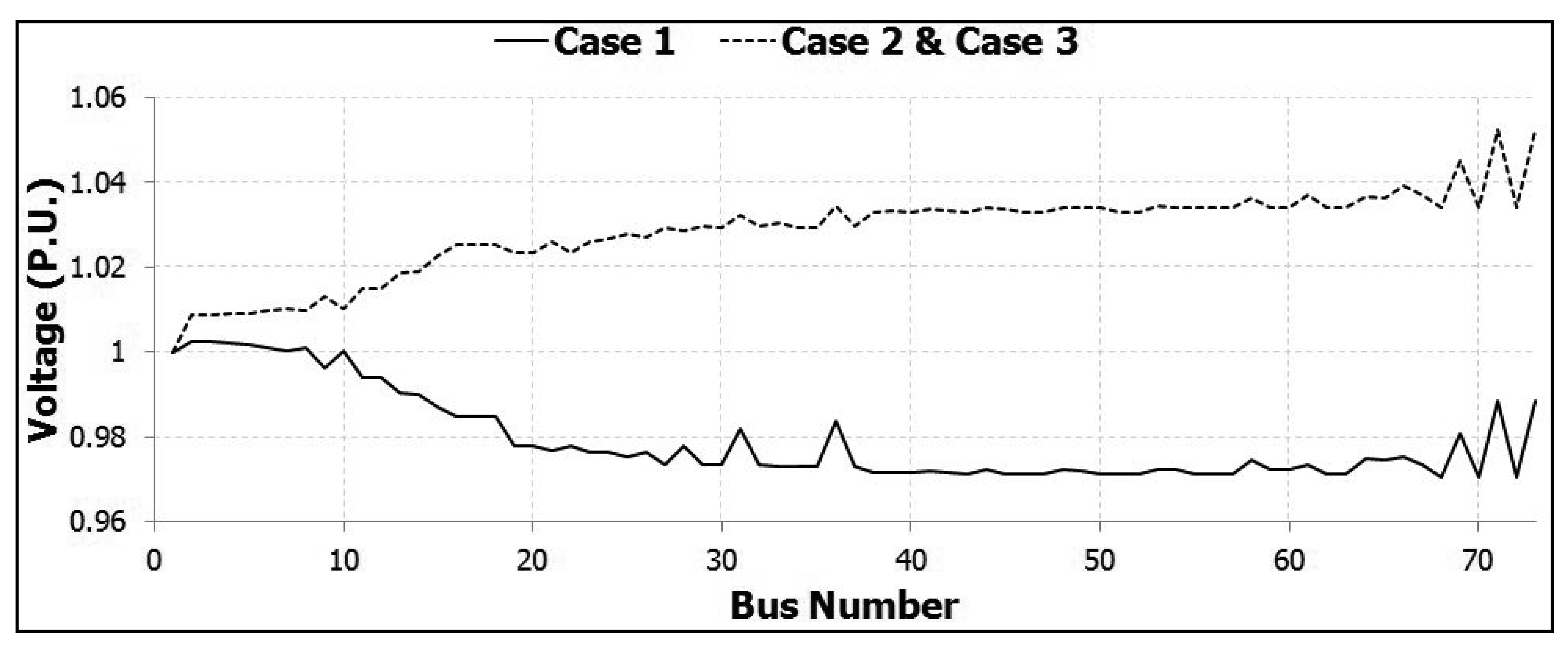
The voltage was the only operational constraint of the distribution system, and it ranged between 0.96 p.u. and 1.04 p.u., under the normal operation. Figure 8 shows the voltage profile of Phase A, prior to running the KSDMS VVO of each case. While Case 1 did not have a voltage violation, Cases 2 and 3 had overvoltages at the system terminals (Buses 69, 71 and 73), as shown in Figure 7. In all cases, the KSDMS VVO calculated the reference values of the voltage and reactive power control equipment within 1 s.
4.1. Results of Case 1
Because there was no violation in Case 1, the KSDMS VVO only ran LM. The reactive power control of the DG reduced the loss from 124.7 kW to 86.6 kW, a 32% reduction. Table 6 summarizes the power factor reference values of the DG before, and after running the KSDMS VVO, and status information of the distribution system.
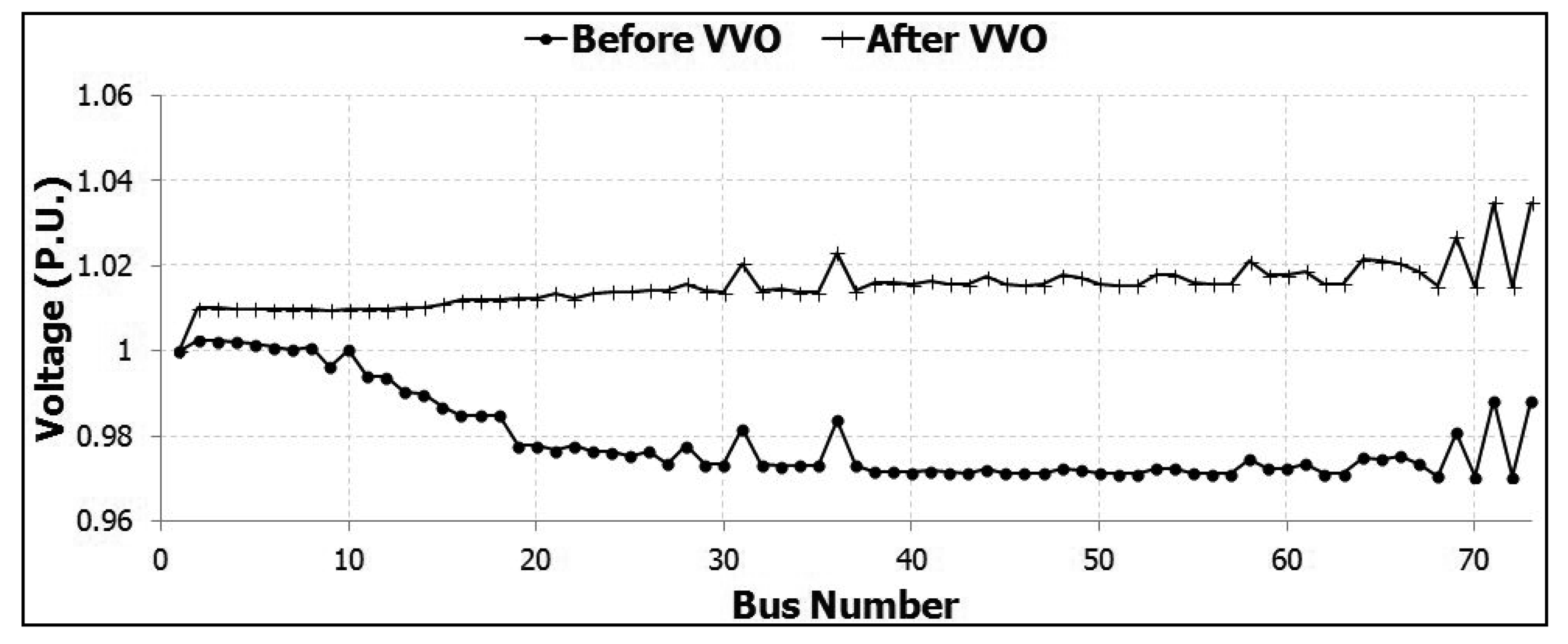
As a result of Case 1, because the power factor reference values of the DG changed to lagging values, the DG supplied reactive power to the distribution system, and the voltages of the system increased overall, as shown in Figure 9.
4.2. Results of Case 2
The overvoltage in Case 2 was 1.3%, which can be resolved in three ways using the OLTC and SVR: lowering the tap position of the OLTC by two taps, lowering the tap position of the SVR by three taps, or lowering the tap positions of the OLTC and SVR by one tap each. From Table 5, it can be figure out that the last option minimized operation cost.
Running the KSDMS VVO generated the same solution. Because it had an overvoltage, and did not have the SVC or DGs to control it, ELD and SCM were sequentially executed. As a result, the emergency level was zero, and the overvoltage was resolved by lowering the tap positions of the OLTC and SVR by one tap each. Figure 10 shows the voltage profile of the distribution system before and after running the KSDMS VVO; and Table 7 shows the reference values of the control equipment calculated through ELD and SCM, and the maximum and minimum voltages and losses of the distribution system, after running each module.
4.3. Results of Case 3
Since the DGs were controllable, the over voltage violation was resolved without a switching operation of the OLTC and SVR by adjusting the power factor reference of DG 3 to leading 0.98. That is, using the DG as a voltage and reactive power control resource saved the operation costs of the OLTC and SVR.
Because there was an overvoltage at the DGs, the KSDMS VVO sequentially executed ELD, SCM, and LM. Figure 11 shows the voltage profile of the distribution system before and after running the KSDMS VVO. Table 8 shows the reference values of the control equipment calculated through ELD and SCM, and the maximum and minimum voltages and losses of the distribution system after running each module. The KSDMS VVO went through the following processes to resolve the overvoltage and calculated the reference values of the voltage and reactive power control equipment that can minimize the switching costs and power loss: ELD controlled the OLTC and DGs to resolve the overvoltage in the system; SCM used the DGs to minimize the operation costs of the OLTC and SVR; executing SCM initialized the tap position of the OLTC back to 12, but increased the loss to 465.7 kW; and then LM used the DGs to reduce the loss to 315.0 kW.
4.4. Effect of Dimension on the Performance of the VVO
In order to analysis the effect of dimension of the decision variable on the performance of the proposed VVO method, the execution number of power flow and computation time required to calculate an optimal solution were obtained by changing the OLTC and SVR models in Case 3: three-phase regulated type and single-phase regulated type. Since the three-phase regulated type OLTC and SVR equally control each phase tap position, a single decision variable was assigned for each OLTC and SVR. On the other hand, three decision variables were assigned for each OLTC and SVR, if the OLTC and SVR were modeled as a single-phase regulated type. As shown in Table 9, even though the number of the integer decision variable was increased by three times, the computation time was only increased by 15% with the proposed VVO. For all cases, the VVO could calculate the references for the voltage and reactive power control devices within 24 the power flow calculations.
5. Field Demonstration of the KSDMS VVO
We verified through field demonstration whether the program, developed and installed on the platform of the KSDMS (Figure 3), stabilizes the system through continuous control. The subject systems were seven distribution lines of the Seongsan and Jocheon substations on the Jeju Island, and the Manjang D/L from the Seongsan Substation was the only line that was actually used to verify the applicability of the developed program. Figure 11 shows the system structure of the Manjang D/L. As shown in the figure, the system forms a micro-grid environment, equipped with the DG and STATCOM at the terminal of the system, where the micro-grid management system (MGMS) monitors and controls inside the system. In addition, the TDAS operates the current distribution system, which, as shown in Figure 12, is built with a communication system and data interface; it receives field data from the TDAS and MGMS, and sends commands from the KSDMS platform to terminals and control equipment.
To verify the continuous controllability of the KSDMS VVO, we had it perform some operations, such as generating recommended voltages, transmitting them to the connected equipment, and waiting for the equipment to respond, every 5 min. Once the equipment received the recommended voltage, we verified how it operated, based on the voltages. Figure 13 and Table 10 show the results of voltage control at 5-min intervals. VVO in the KSDMS calculated recommended voltages, which were transmitted to the MGMS, and then to the STATCOM.
Figure 13a represents the voltage control results using KSDMS VVO for HW13 switch point of Figure 12. As shown in this figure, after the voltage control of VVO, the voltage fluctuation of connection point (HW13) of MG voltage is reduced. Figure 13b represents the wind power output during the same time of voltage control. This figure shows that the fluctuation of wind power output is significant.
Figure 14 shows the voltage profiles before and after the VVO control. The X-axis represents the location of distribution line from substation to end point. The STATCOM is located at the dotted line point. As shown in this figure, VVO was recommended to increase the reactive power output of the STACOM from 104 kVAr to 403 kVAr, which confirmed that the voltage profile increased slightly. The control frequency varied from 1 min to 15 min, and the minimum of 5-min frequency for periodical analysis and control was determined to be appropriate for the application programs of the KSDMS based on the response and action tests of the field devices, data transmission, and confirmation over the human machine interface (HMI).
6. Conclusions
We have summarized the development and testing of the KSDMS VVO that will operate the Korean distribution system in the future. The purpose of the proposed VVO was to resolve the voltage management problems that exist in the current DMS, and the KSDMS VVO resolved the problems of executing repeated flow calculations, and adding control equipment that the existing IVVC technology used for voltage optimization.
The proposed VVO, an OPF program, determines voltage, overload, and power factor violations and resolves the violations, or provides recommended voltages, allowing the distribution system to operate at its optimal level, by utilizing available resources throughout the system. VVO uses the MILP and SMILP methods, to determine an optimal solution through repeated calculation.
We simulated a test of the precision of the VVO on some selected systems, and performed an actual test of the applicability of the proposed VVO. Its precision in the proposed program was confirmed, and the actual applicability test confirmed its performance for enhancing the stability of the system, by running the KSDMS VVO continuously.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Saric, A.T.; Ciric, R.M. Multi-objective integration of real-time functions in distribution management system. Int. J. Electr. Power Energy Syst. 2003, 25, 247–256. [Google Scholar]
- Vargas, A.; Samper, M.E. Real-time monitoring and economic dispatch of smart distribution grids: High performance algorithms for DMS applications. IEEE Trans. Smart Gird 2012, 3, 866–877. [Google Scholar]
- Song, I.-K.; Jung, W.-W.; Kim, J.-Y.; Yun, S.-Y.; Choi, J.-H.; Ahn, S.-J. Operation schemes of smart distribution networks with distributed energy resources for loss reduction and service restoration. IEEE Trans. Smart Gird 2013, 4, 367–374. [Google Scholar]
- Li, Z.; Yang, F.; Mohagheghi, S.; Wang, Z.; Tournier, J.C.; Wang, Y. Toward smart distribution management by integrating advanced metering infrastructure. Electr. Power System Res. 2013, 105, 51–55. [Google Scholar]
- Park, J.-Y.; Nam, S.-R.; Park, J.-K. Control of a ULTC considering the dispatch schedule of capacitors in a distribution system. IEEE Trans. Power Syst. 2007, 22, 755–761. [Google Scholar]
- Niknam, T.; Zare, M.; Aghaei, J. Scenario-based multiobjective volt/VAR control in distribution networks including renewable energy sources. IEEE Trans. Power Deliv. 2012, 27, 2004–2019. [Google Scholar]
- Roytelman, I.; Ganesan, V. Coordinated local and centralized control in distribution management systems. IEEE Trans. Power Deliv. 2000, 15, 718–724. [Google Scholar]
- Madureira, A.G.; Peas Lopes, J.A. Coordinated voltage support in distribution networks with distributed generation and microgrids. IET Renew. Power Gener. 2009, 3, 438–454. [Google Scholar]
- Hong, Y.Y.; Luo, Y.F. Reactive Power Control in Distribution System Using Genetic Algorithms. Proceedings of the International Conference on Intelligent Systems Applications to Power Systems (ISAP), Niigata, Japan, 5–8 November 2007; pp. 1–6.
- Oshiro, M.; Tanaka, K.; Senjyu, M.; Toma, S.; Yona, A.; Saber, A.Y.; Funabashi, T.; Kim, C.H. Optimal voltage control in distribution systems using PV generators. Int. J. Electr. Power Energy Syst. 2011, 33, 485–492. [Google Scholar]
- Senjyu, T.; Miyazato, Y.; Yona, A.; Urasaki, N.; Funabashi, T. Optimal distribution voltage control and coordination with distributed generation. IEEE Trans. Power Deliv. 2008, 23, 1236–1242. [Google Scholar]
- Yuan, L.; Wen, F.; Cramer, A.; Dolloff, P.; Zongming, F.; Meikang, Q.; Bhattacharyya, S.; Holloway, L.; Gregory, B. Voltage and VAR Control to Enable High Penetration of Distributed Photovoltaic Systems. Proceeding of the North American Power Symposium (NAPS), Champaign, IL, USA, 9–11 September 2012; pp. 1–6.
- Song, I.-K. Smart Distribution Management System (TR.1324.S2012.0346); Korea Electric Power Corporation: Daejeon, Korea, 2012. [Google Scholar]
- Kim, Y.-I.; Lim, I.-H.; Choi, M.-S.; Lee, S.-J.; Lee, S.-W.; Kwon, S.-C. Integrated volt/VAR control algotithm based on the distributed load modeling of distribution network. Trans. Korean Inst. Electr. Eng. 2009, 58, 1463–1471. [Google Scholar]
- Kim, Y.-I.; Lim, I.-H.; Choi, M.-S.; Lee, S.-J.; Lee, S.-W.; Ha, B.-N. The optimal volt/VAR algorithms with distributed generation of distribution system. Trans. Korean Inst. Electr. Eng. 2010, 59, 298–305. [Google Scholar]
- Deshmukh, S.; Natarajan, B.; Pahwa, A. Voltage/VAR control in distribution networks via reactive power injection through distributed generators. IEEE Trans. Smart Grid 2012, 3, 1226–1234. [Google Scholar]
- Lin, M.H.; Tsai, J.F.; Yu, C.S. A review of deterministic optimization methods in engineering and management. Math. Probl. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization-Theory and Practice; John Willey & Sons: New York, NY, USA, 1996. [Google Scholar]
- Weber, J.D. Implementation of a Newton-Based Optimal Power Flow into a Power System Simulation Environment. Master's Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 1997. [Google Scholar]
Nomenclature
| LEM,V, LEM,S, LEM,PF | emergency level for voltage, line flow and power factor |
| Vlower,i, Vupper,i | minimum and maximum voltages of bus i when a voltage emergency level is LEM,V |
| Vlower0,i, Vupper0,i | minimum and maximum voltages of bus i in the normal operation |
| ΔVEL | increasing ratio of the operational range of the voltage with the increase of LEM,V |
| Supper,j | maximum flow of line j when a line flow emergency level is LEM,S |
| Supper 0,j | maximum flow of line j in the normal operation |
| ΔSEL | increasing ratio of the operational range of the line flow with the increase of LEM,S |
| PFlag,lower,k, PFlead,lower,k | minimum and maximum lagging power factors of main transformer (MTR) k when a power factor emergency level is LEM,PF |
| PFlag,lower0,k, PFlead,lower0,k | minimum and maximum lagging power factors of MTR k in normal operation |
| ΔPFEL | increasing ratio of the operational range of the power factor with the increase of LEM,PF |
| g(•) | power balance equation |
| x | state variable vector composed of voltage magnitude and angle |
| u | recommendation value vector of voltage and reactive power control devices based on switching |
| ulower, uupper | lower and upper limits of u |
| v | recommendation vector of static VAR compensator (SVC) and DG |
| vlower, vupper | lower and upper limits of v |
| FUV,i, FOV,i | under voltage and over voltage violation flags of bus i |
| Sj | power flow of line j |
| FOL, j | overload violation flag of line j |
| PFk | power factor of MTR k |
| FUPF, lead,k, FUPF, lag, k | leading and lagging power factor violation flag of MTR k |
| ci | operation cost of control device i |
| ui | recommendation value of control device i [Tap position for on-load tap changer (OLTC) and series voltage restorer connection status (disconnected = 0, connected = 1) for shunt (SVR), capacitor (SC) and shunt reactor (ShR)] |
| u0,i | status of control device i before VVO |
| Pk, Qk | active and reactive power flow of MTR k |
| Vesti | estimation voltage |
| Vref, VDB | voltage reference values of the voltage relay and dead band |
| R | droop constant |
| PFref | power factor reference values |
| f | coefficient vector of the linearized object function |
| C | coefficient matrix of the linearized constraint functions |
| b | upper bound vector of the linearized constraints |
| ui+ | change of ui in the positive direction at u0, i |
| ui− | change of ui in the positive direction at u0, i |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Items | Conventional IVVC | Proposed VVO |
|---|---|---|---|
| 1 | Optimization method | Combined optimization method | SMILP |
| 2 | Optimal solution | Voltage violation removal | Voltage violation removal, SCM and LM |
| 3 | Calculation time | Very long (according to the number of control variables) | Less than 2 s for 5000 buses system |
| 4 | Control variables | Only considering for discrete control devices [Transformer Tap (OLTC), SC, SVR] | Considering for discrete and continuous control devices [Transformer Tap (OLTC), SVR, SC, SVC, STATCOM, DG P/Q] |
| 5 | Power flow method | Forward-Backward Method (Calculation of voltage drop) | Newton-Raphson Method (Calculation of voltage/angle, P/Q) |
| No. | Object | Development |
|---|---|---|
| 1 | Increased receptivity of distributed energy resource (DER) | Converting to an active distribution network:
|
| 2 | Increase of standardization and compatibility |
|
| 3 | Automation of fault restoration |
|
| Mode | Application | Description |
|---|---|---|
| Real-time | Topology processor | Creation of buses and islands using connectivity information and switch status, and checking the live/dead status of devices |
| Section load estimator | Section (between automatic switches) load estimation, using automatic switch measurements | |
| State estimator | State estimation using the switch measurements (voltage, current, angle), and the results of section load estimator. Use the weighted least square algorithm and network reduction method | |
| Power flow | Real-time power flow based on the result of state estimator (Newton-Raphson method, Full coupled Jacobian) | |
| Voltage VAR optimization | Recommendation of voltage control devices (OLTC, SVR, Shunt Cap, SVC, DG P/Q) for voltage violation removal and LM. Use the mixed integer linear programming (MILP) algorithm and result of power flow results for the base case | |
| Section load pattern | Creation of section load pattern [per 15 min, per day type (workday, weekend, holiday), per season type (spring/fall, summer, winter)], using the results of the state estimator or power flow | |
| Event driven | Fault location | Detection of fault section, using fault indicator (FI) and DER interconnection information |
| Service restoration | Provision of switch operation sequence for interruption area, excluding the fault sections | |
| Study | Network reconfiguration | Recommendation of switching sequence for LM and load balancing |
| Protection coordination | Recalculation of setting values of protective devices (communication and over current) for network topology change | |
| Short circuit analysis | Calculation of fault current (including the contribution of renewable energy), using IEC60909 |
| Device | Operation mode | Actual control variables | Recommendation |
|---|---|---|---|
| OLTC, SVR | Automatic voltage control, direct tap control | Voltage, tap position | Tap position |
| SC, ShR | State control | Switch state | Switch state |
| SVC | Automatic voltage regulation | Voltage | Reactive power |
| DG | Constant voltage/power factor/reactive power control | Voltage, power factor, reactive power | Reactive power |
| Device | Tap step size | Operation cost ($/tap changing) |
|---|---|---|
| OLTC | 1.25% | 15 |
| SVR | 0.625% | 10 |
| VVO execution | Reference | Minimum V (p.u.) | Maximum V (p.u.) | Power loss (kW) | ||
|---|---|---|---|---|---|---|
| DG1 | DG2 | DG3 | ||||
| Before | 1 | 1 | 1 | 0.970 | 1.002 | 124.7 |
| After | Lag 0.90 | Lag 0.97 | Lag 0.99 | 1.000 | 1.035 | 84.6 |
| Executed module | Reference | Minimum V (p.u.) | Maximum V (p.u.) | Power loss (kW) | |
|---|---|---|---|---|---|
| OLTC | SVR | ||||
| Initial | 12 | 15 | 1.000 | 1.053 | 304.3 |
| ELD | 9 | 12 | 0.997 | 1.038 | 332.2 |
| SCM | 11 | 14 | 0.965 | 1.000 | 313.2 |
| Executed module | Reference | Minimum V (p.u.) | Maximum V (p.u.) | Power Loss (kW) | ||||
|---|---|---|---|---|---|---|---|---|
| OLTC | SVR | DG1 | DG2 | DG3 | ||||
| Initial | 12 | 15 | 1 | 1 | 1 | 1.000 | 1.053 | 304.3 |
| ELD | 11 | 15 | lag 0.90 | lag 0.90 | lead 0.90 | 0.997 | 1.038 | 318.9 |
| SCM | 12 | 15 | lead 0.90 | lead 0.90 | lead 0.90 | 0.965 | 1.000 | 465.7 |
| LM | 12 | 15 | 1 | 1 | lead 0.90 | 1.000 | 1.039 | 315.0 |
| OLTC model | SVR model | # of decision variable | # of power flow | Computation time | |
|---|---|---|---|---|---|
| Integer | Double | ||||
| TPR | TPR | 2 | 3 | 22 | 0.59 s |
| TPR | SPR | 4 | 3 | 24 | 0.64 s |
| SPR | TPR | 4 | 3 | 22 | 0.62 s |
| SPR | SPR | 6 | 3 | 23 | 0.67 s |
| Voltage (before VVO) | Recommendation of VVO | Voltage (after VVO) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | Voltage (V) | Voltage (V) | p.u. | Rise/Drop | Voltage (V) | Rise/Drop | |||||
| A | B | C | Line | Phase | A | B | C | ||||
| 12:53 | 13,635 | 13,637 | 14,110 | 23,316 | 13,461 | 1.018 | Drop | 13,609 | 13,611 | 14,077 | Drop |
| 12:58 | 13,448 | 13,463 | 13,904 | 23,316 | 13,538 | 1.024 | Rise | 13,466 | 13,485 | 13,922 | Rise |
| 13:03 | 13,543 | 13,561 | 13,990 | 23,511 | 13,574 | 1.027 | Drop | 13,545 | 13,554 | 13,983 | Drop |
| 13:08 | 13,578 | 13,581 | 14,048 | 23,402 | 13,511 | 1.022 | Drop | 13,570 | 13,586 | 14,040 | Drop |
| 13:13 | 13,499 | 13,517 | 13,955 | 23,562 | 13,603 | 1.029 | Rise | 13,507 | 13,528 | 13,956 | Rise |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yun, S.-Y.; Hwang, P.-I.; Moon, S.-I.; Kwon, S.-C.; Song, I.-K.; Choi, J.-H. Development and Field Test of Voltage VAR Optimization in the Korean Smart Distribution Management System. Energies 2014, 7, 643-669. https://doi.org/10.3390/en7020643
Yun S-Y, Hwang P-I, Moon S-I, Kwon S-C, Song I-K, Choi J-H. Development and Field Test of Voltage VAR Optimization in the Korean Smart Distribution Management System. Energies. 2014; 7(2):643-669. https://doi.org/10.3390/en7020643
Chicago/Turabian StyleYun, Sang-Yun, Pyeong-Ik Hwang, Seung-Il Moon, Seong-Chul Kwon, Il-Keun Song, and Joon-Ho Choi. 2014. "Development and Field Test of Voltage VAR Optimization in the Korean Smart Distribution Management System" Energies 7, no. 2: 643-669. https://doi.org/10.3390/en7020643
APA StyleYun, S.-Y., Hwang, P.-I., Moon, S.-I., Kwon, S.-C., Song, I.-K., & Choi, J.-H. (2014). Development and Field Test of Voltage VAR Optimization in the Korean Smart Distribution Management System. Energies, 7(2), 643-669. https://doi.org/10.3390/en7020643