
A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System


Abstract
:1. Introduction
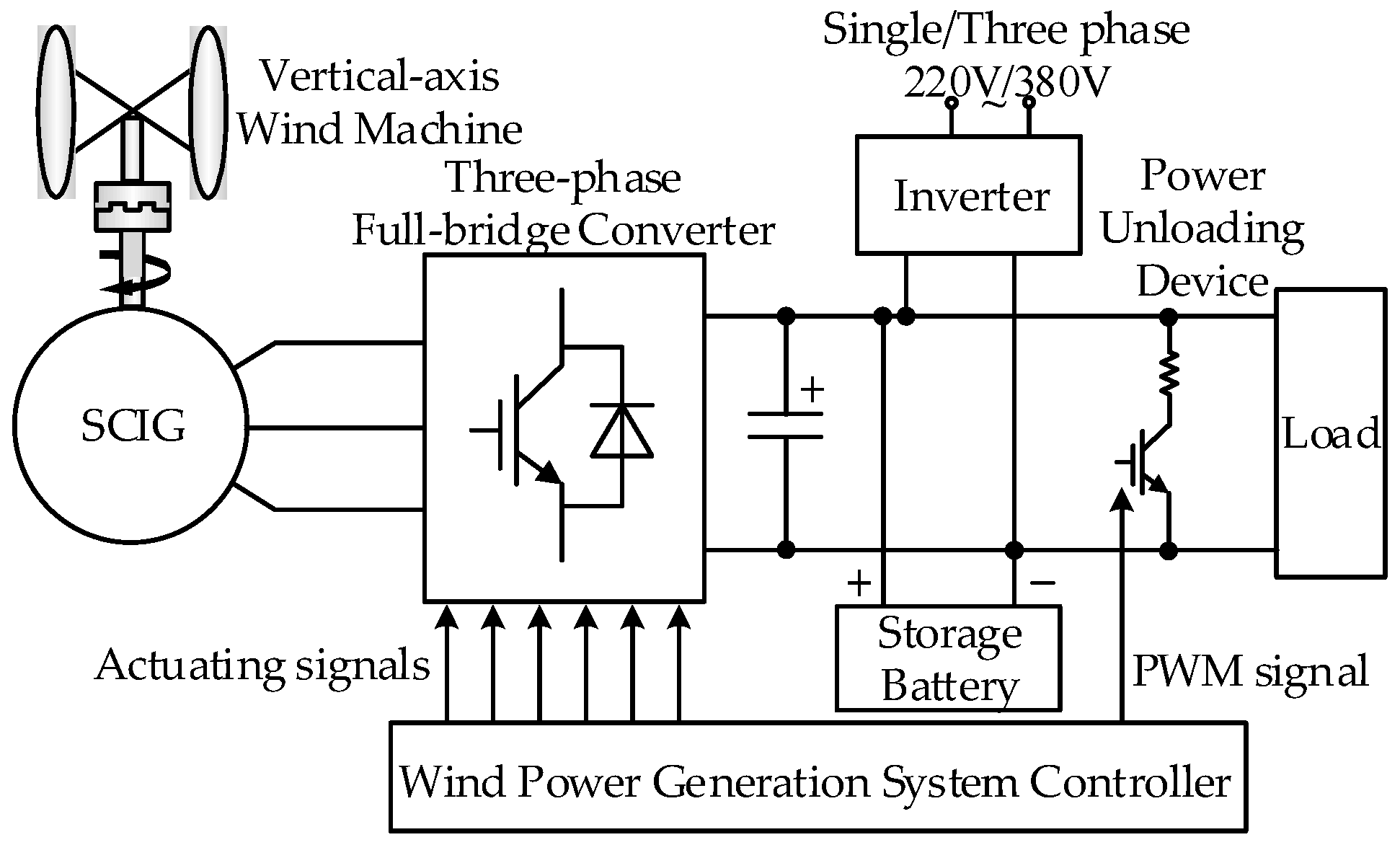
2. System Structure and Working Principle
3. System Control Strategy
3.1. Wind Power Generator Control
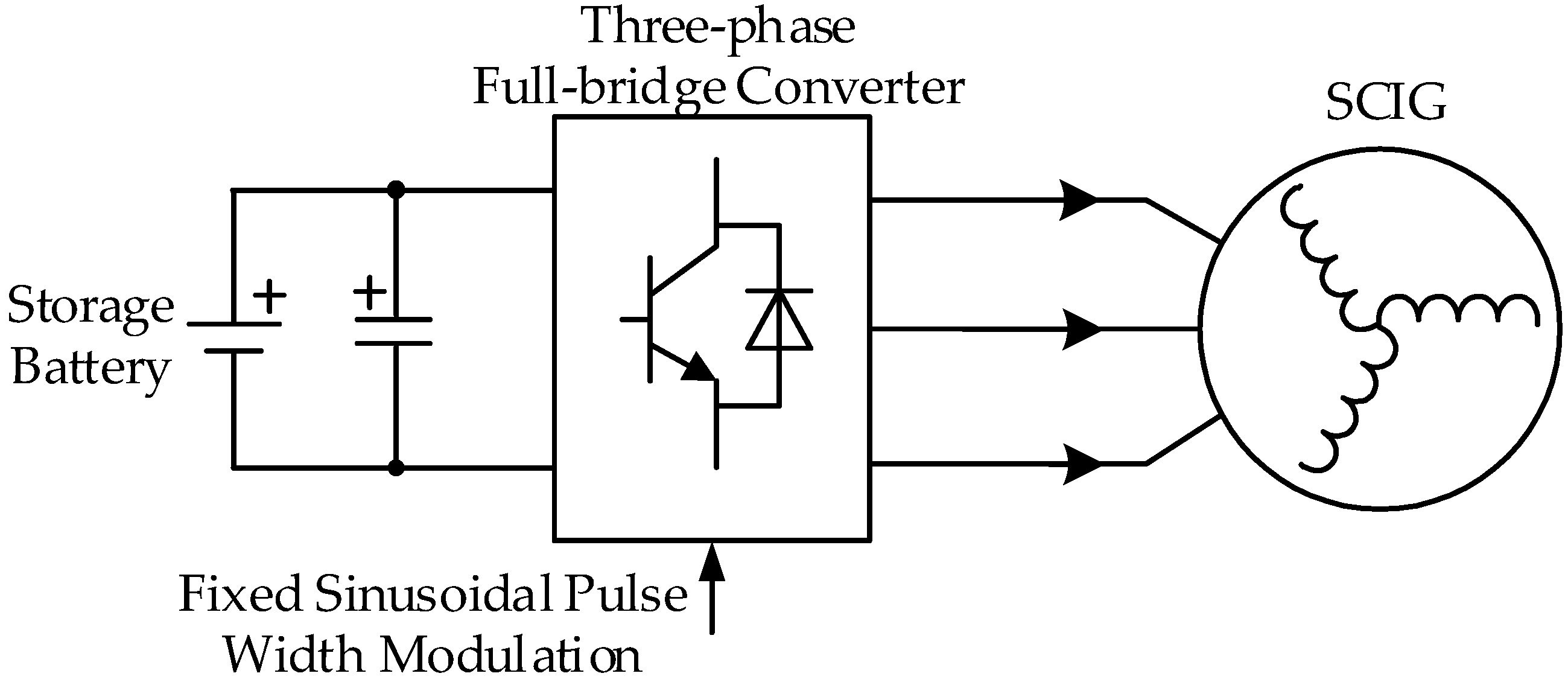
3.1.1. Assisted Self-Starting Control Strategy
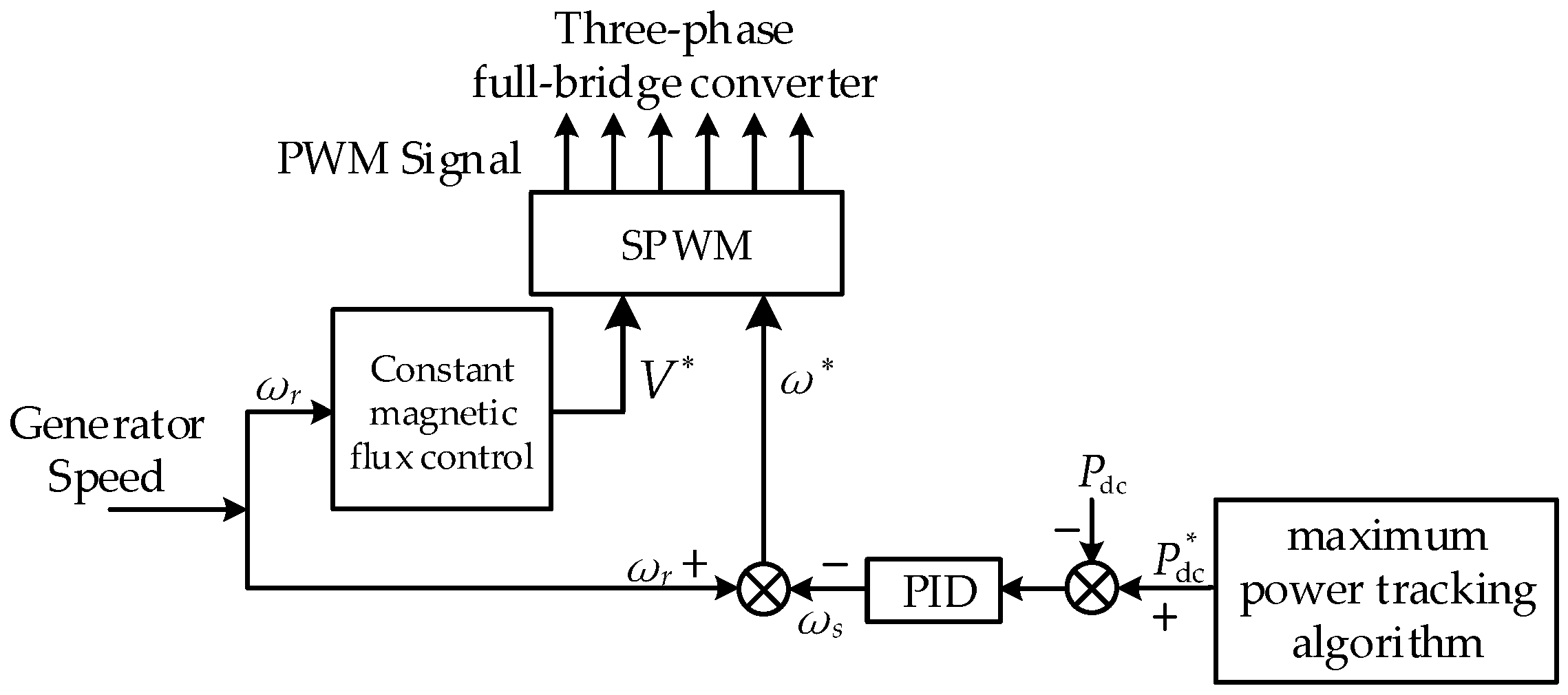
3.1.2. Power Generation Operation Control Strategy
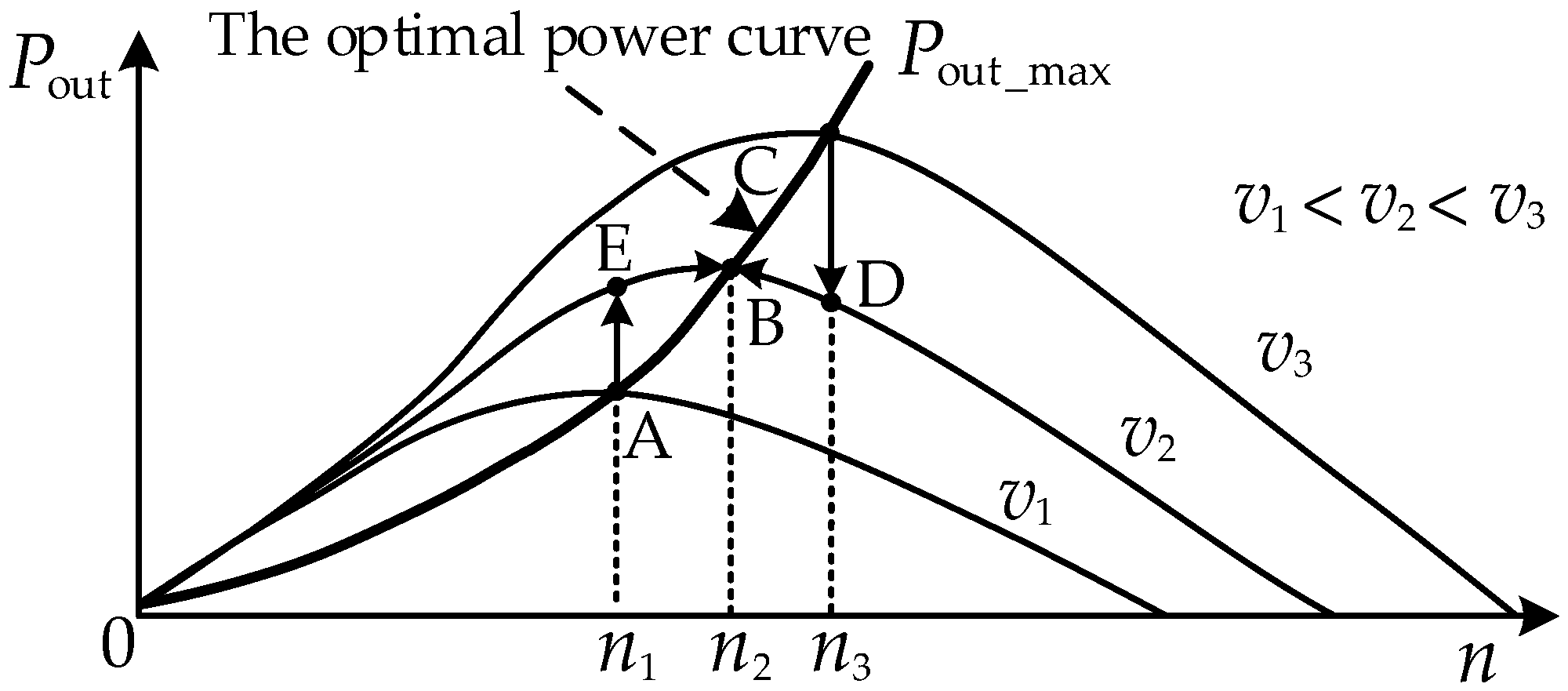
3.2. Maximum Power Tracking Control
3.3. Storage Battery Control Strategy
3.3.1. System Energy Management Strategy
3.3.2. Charging and Discharging Control Strategy
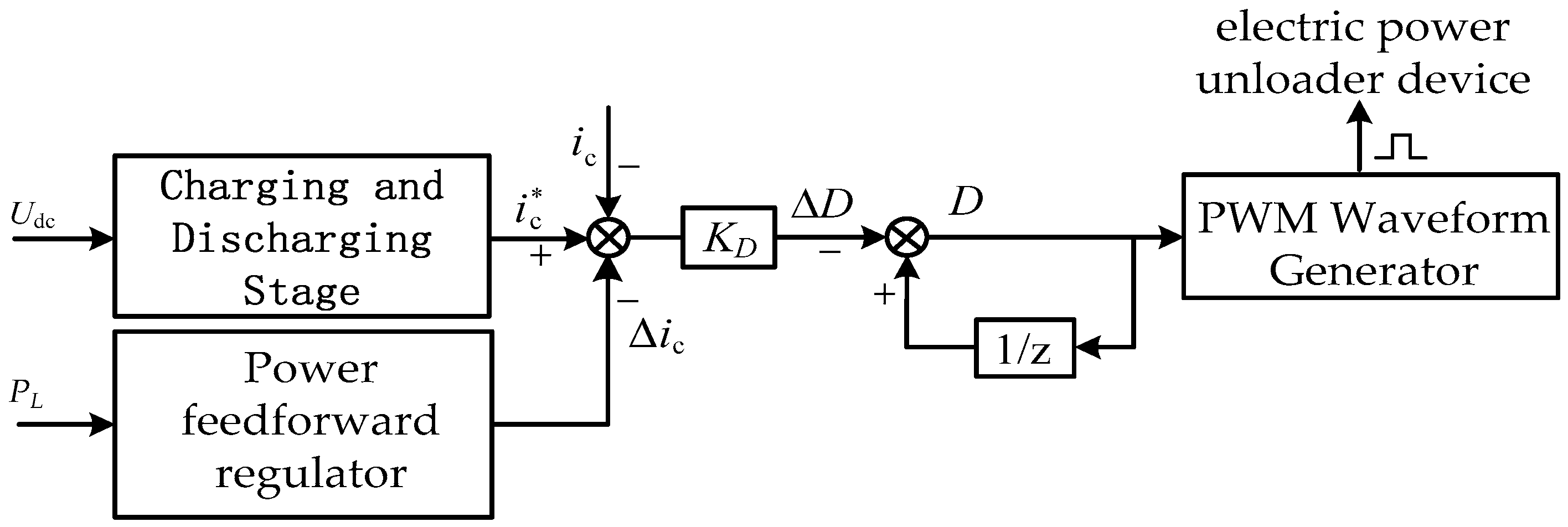
3.3.3. Actual Current Control
4. Experimental Verification and Comparative Experiments
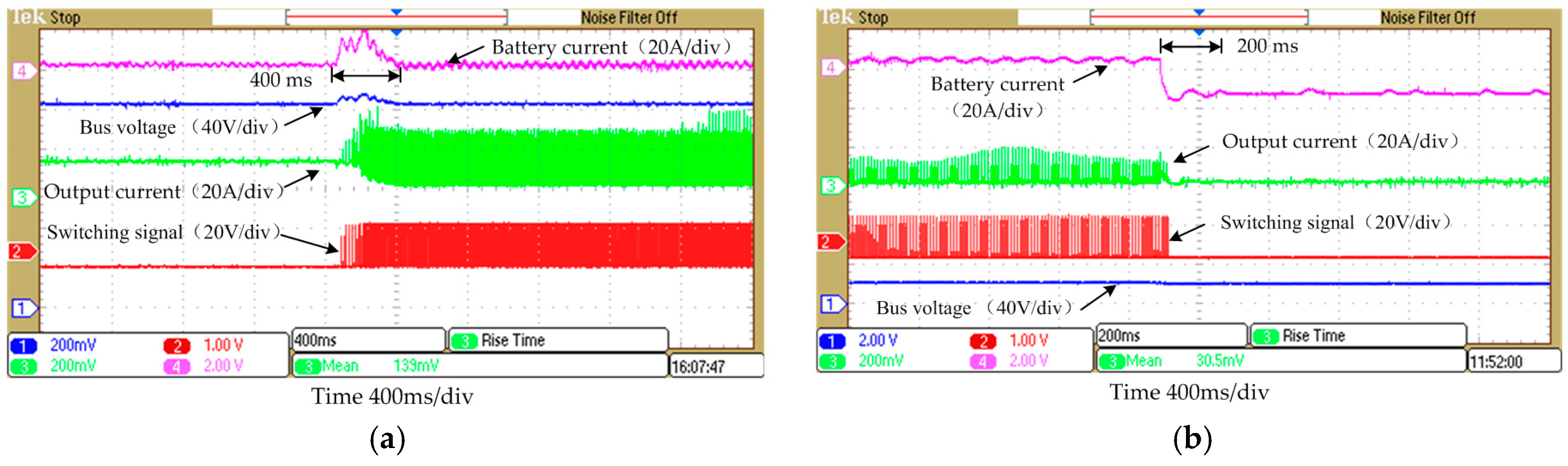
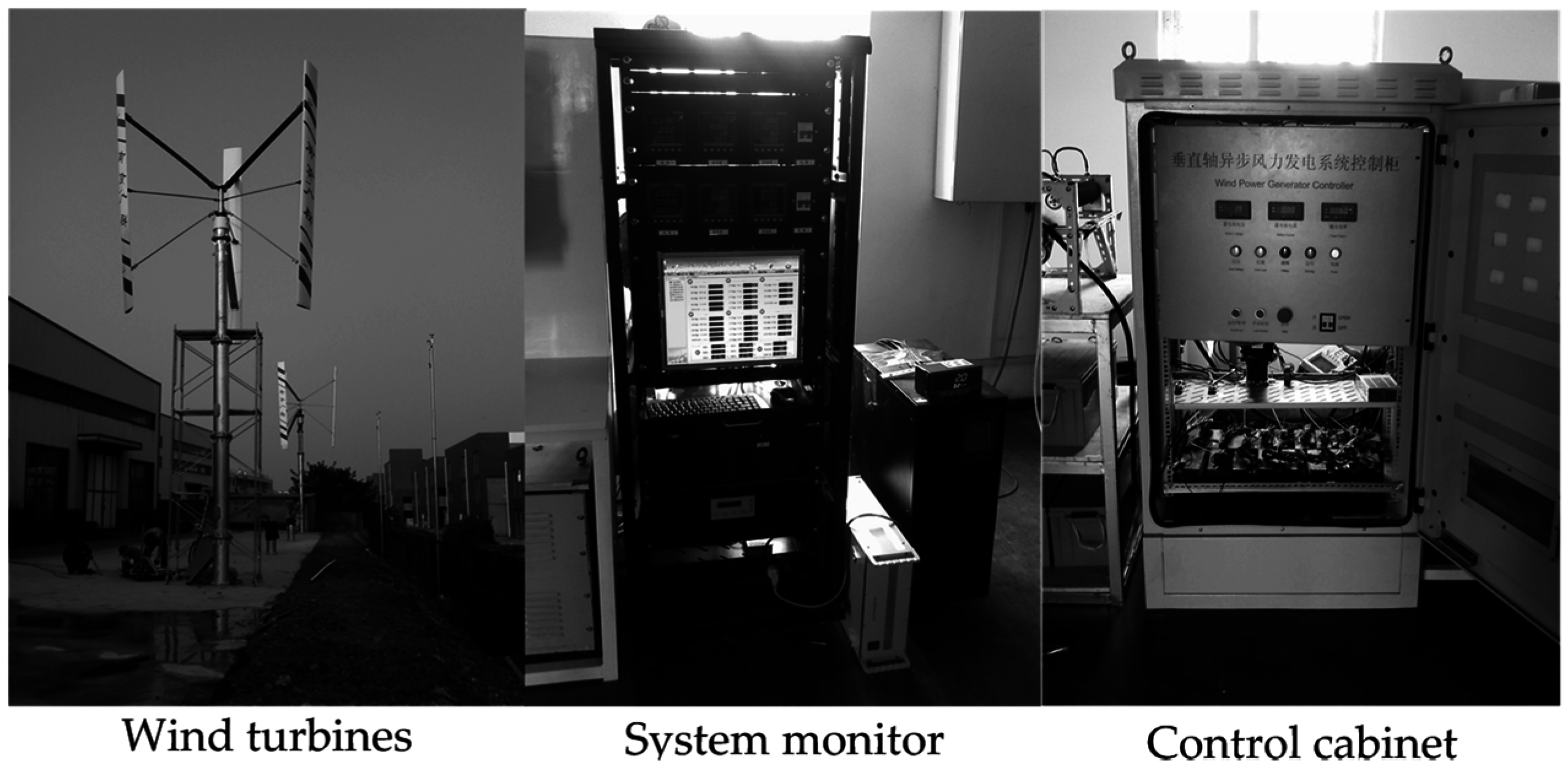
4.1. Experimental Verification
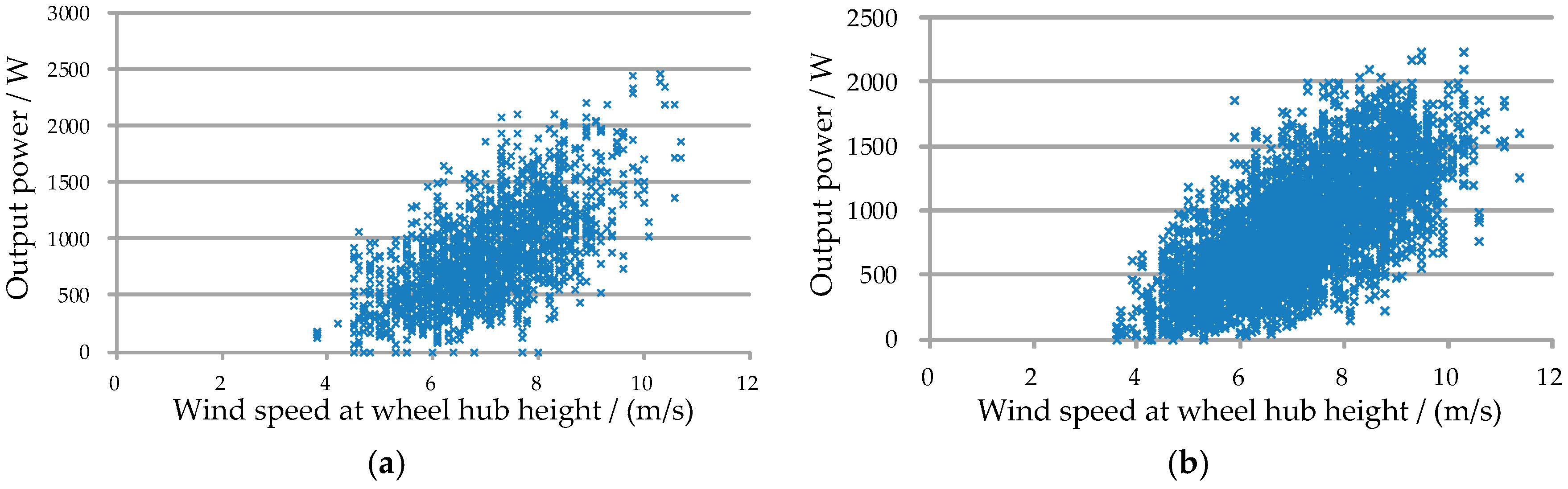
4.2. Comparative Experiments
- (1)
- The test data is recorded every second, and the maximum, minimum, mean and standard deviation of every ten minutes of data are calculated;
- (2)
- Two wind turbines should be guaranteed to operate normally for more than 180 h;
- (3)
- All data is divided into many pieces per 0.5 m/s wind speed, and the average for each piece of data is calculated;
- (4)
- One-to-one correspondence of the average power and the average wind speed are finally achieved, from which the power curve is obtained.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mollerstrom, E.; Ottermo, F.; Hylander, J.; Bernhoff, H. Noise emission of a 200 kW VAWT. Energies 2016, 9, 19. [Google Scholar] [CrossRef]
- Ushiyama, I.; Nagai, H.; Shinoda, J. Experimentally determining the optimum design configuration for Savonius rotors. Bull. JSME 1986, 29, 4130–4138. [Google Scholar] [CrossRef]
- Kirke, B.K. Evaluation of Self-Starting Vertical Axis Wind Turbines for Stand-Alone Applications. Ph.D. Thesis, Griffith University, Brisbane, Australia, 1998. [Google Scholar]
- Islam, M.; Ting, D.S.-K.; Fartaj, A. Aerodynamic models for Darrieus-type straight-bladed vertical axis wind turbines. Renew. Sustain. Energy Rev. 2008, 12, 1087–1109. [Google Scholar] [CrossRef]
- Menet, J.L. A double-step Savonius rotor for local production of electricity: A design study. Renew. Energy 2004, 29, 1843–1862. [Google Scholar] [CrossRef]
- Saha, U.K.; Thotla, S.; Maity, D. Optimum design configuration of Savonius rotor through wind tunnel experiments. J. Wind Eng. Ind. Aerodyn. 2008, 96, 1359–1375. [Google Scholar] [CrossRef]
- Harrouz, A.; Benatiallah, A.; Harrouz, O. Direct Power Control of A PMSG Dedicated to Standalone Wind Energy Systems. In Proceedings of the 2013 IEEE 8th International Conference an Exhibition on Ecological Vehicles and Renewable Energies, Monte Carlo, Monaco, 27–30 March 2013.
- Pawsey, N.C.K. Development and Evaluation of Passive Variable-Pitch VAWTs. Ph.D. Thesis, The University of New South Wales, Sydney, Australia, 2012. [Google Scholar]
- Chan, T.F. Capacitance requirements of self-excited induction generators. IEEE Trans. Energy Convers. 1993, 8, 304–311. [Google Scholar] [CrossRef]
- Bansal, R.C. Three-phase self-excited induction generators: An overview. IEEE Trans. Energy Convers. 2005, 20, 292–299. [Google Scholar] [CrossRef]
- Liu, L.; Hu, Y.; Huang, W. Summary of technology of induction generator with power electronic converters. Trans. China Electrotech. Soc. 2005, 20, 1–7. [Google Scholar]
- Ojo, O.; Davidson, I.E. PWM-VSI inverter-assisted stand-alone dual stator winding induction generator. IEEE Trans. Ind. Appl. 2000, 36, 1604–1611. [Google Scholar]
- Simoes, M.G.; Bose, B.K.; Spiegel, R.J. Fuzzy logic based intelligent control of a variable speed cage machine wind generation system. IEEE Trans. Power Electron. 1997, 12, 87–95. [Google Scholar] [CrossRef]
- Mclver, A.; Holmes, D.G.; Freere, P. Optimal Control of a Variable Speed Wind Turbine under Dynamic Wind Conditions. In Proceedings of the 1996 IEEE 31th International Conference on Industry Applications, San Diego, CA, USA, 6–10 October 2013; pp. 1692–1698.
- Hu, W.; Wang, Y.; Song, X.; Wang, Z. Development of Vertical-Axis Wind Turbine with Asynchronous Generator Interconnected to the Electric Network. In Proceedings of the 2008 IEEE International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 2289–2293.
- Gu, W. Development and application of large-scale non-grid-connected wind power system. Autom. Electr. Power Syst. 2008, 32, 1–4. [Google Scholar]
- Qi, Z.; Wang, S. Energy management under the coordination control framework for off-grid wind power generation system. ACTA Energ. Sol. Sin. 2009, 30, 503–508. [Google Scholar]
- Alan, I.; Lipo, T.A. Control of a poly phase induction generator/induction motor power conversion system completely isolated from the utility. IEEE Trans. Ind. Appl. 1994, 30, 636–647. [Google Scholar] [CrossRef]
- Seyoum, D.; Rahman, M.F.; Grantham, C. Terminal Voltage Control of a Wind Turbine Driven Isolated Induction Generator Using Stator Oriented Field Control. In Proceedings of the 2003 IEEE Applied Power Electronics Conference and Exposition, Miami Beach, FL, USA, 9–13 February 2003; pp. 846–852.
- El-kafrawi, H.M.; Buamud, M.S. Torque Control of Squirrel-Cage Induction Generator Using Stator Oriented Field Control. In Proceedings of the 2015 IEEE 6th International Conference on Renewable Energy Congress (IREC), Sousse, Tunisia, 24–26 March 2015.
- Huang, W.; Hu, Y. Research of the DTC control strategy for cage-type induction generator. Trans. China Electrotech. Soc. 2002, 17, 30–34. [Google Scholar]
- Bu, F.; Huang, W.; Hu, Y.; Shi, K. An intergrated AC and hybrid generation system using dual stator-winding induction generator with static excitation controller. IEEE Trans. Energy Convers. 2012, 27, 810–812. [Google Scholar] [CrossRef]
- Bu, F.; Huang, W.; Hu, Y.; Shi, J.; Shi, K. A stand-alone dual stator-winding induction generator variable frequency AC power system. IEEE Trans. Power Electron. 2012, 27, 10–13. [Google Scholar] [CrossRef]
- Esmaili, R.; Xu, L.; Nichole, D.K. A New Control Method of Permanent Magnet Generator for Maximum Power Tracking in Wind Turbine Application. In Proceedings of the 2005 IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 16 June 2005; pp. 2090–2095.
- Zhou, R.; Lu, J.; Wang, G.; Long, X.; Zhang, X.; Li, C. The Charging and Discharging Balance Control Strategy of Power Batteries for Hybrid Energy Storage. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Capri, Italy, 22–24 June 2016; pp. 265–269.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator Parameters | Other Parameters | ||
|---|---|---|---|
| Rated power | 5.5 kW | Storage Batteries | 16 × 12 V/20 Ah |
| Rated speed | 1450 rpm | Power resistance | 6.4 Ω/7.5 kW |
| Rated line voltage | 154 V | Wind turbine | 200 rpm/5 kW |
| Pole pairs | 2 | Drive ratio | 1:7.25 |
| Comparative Objects | SCIG Wind Power System | PMSG Wind Power System |
|---|---|---|
| Wind machine | Same | Same |
| Rated power | Same | Same |
| Connection type | Speed increasing gear (1:7.25) | Magnetic suspension & direct drive |
| Structure topology | Full-bridge converter | Uncontrolled rectifier + DC/DC |
| System controller | One controller | Two controllers (starter + generation) |
| Storage battery | 16 × 12 V/20 Ah | 9 × 12 V/100 Ah |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Shi, K.; Bu, F.; Zhao, D.; Fang, Z.; Liu, R.; Zhu, Y. A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System. Energies 2016, 9, 822. https://doi.org/10.3390/en9100822
Xu P, Shi K, Bu F, Zhao D, Fang Z, Liu R, Zhu Y. A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System. Energies. 2016; 9(10):822. https://doi.org/10.3390/en9100822
Chicago/Turabian StyleXu, Peifeng, Kai Shi, Feifei Bu, Dean Zhao, Zhiming Fang, Rongke Liu, and Yi Zhu. 2016. "A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System" Energies 9, no. 10: 822. https://doi.org/10.3390/en9100822
APA StyleXu, P., Shi, K., Bu, F., Zhao, D., Fang, Z., Liu, R., & Zhu, Y. (2016). A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System. Energies, 9(10), 822. https://doi.org/10.3390/en9100822