1. Introduction
Recently, global electricity generation has swiftly grown in order to fulfill consumer demand. For instance, over the last four decades, the annual aggregate production of electricity increased from 6144 TWh to 23,391 TWh (terawatt hour), an average annual growth rate of 3.4% [
1]. In 2013, the fossil fuel-powered plants (such as: oil, natural gas and coal/peat) contributed approximately 67.2% of the global electricity generation [
1,
2]. However, reliance on fossil fuels leads to increasing pollution of the environment and the deterioration of human health. Additionally, the depletion of fossil fuels is a concern and should be taken into account. Accordingly, the future electricity generation should reduce its reliance on fossil fuels by the growing use of clean and renewable energy generation sources.
The key problem with the renewable energy generation sources is that the output power fluctuates due to the nature of sources, including solar and/or wind. This fluctuation affects the grid stability and reliability. As a consequence, electrical energy storage (EES) has been recognized as one of the most promising approaches for increasing the grid efficiency, voltage stability and reliability, especially for optimizing power flows and supporting the renewable energy generation sources [
2,
3,
4].
Furthermore, in the case of traction applications, vehicles can be powered by using battery storage systems instead of burning gasoline and diesel fuel in order to reduce associated emissions and the demand for oil. A serious weakness associated with rechargeable battery storage systems is the high cost of batteries, which represents a prominent barrier for their use in the automotive applications or as grid connected energy storage. As a rule, the cost of batteries can be decreased by lowering the material costs, enhancing the process efficiencies and increasing the production volume [
5,
6]. Another more effective solution is to re-use the retired battery systems, which have been utilized for powering the (hybrid) electric vehicles (i.e., plug-in hybrid electric vehicle (PHEV), hybrid electric vehicle (HEV) and battery electric vehicle (BEV)) for supporting the grid applications. Basically, there are two ways to use a vehicle’s battery system for grid applications [
5,
6]:
- (1)
Vehicle-to-grid (V2G) application utilizes the battery for grid services, whereas the battery is still in the vehicle [
7]; and
- (2)
Second-life application utilizes the used-battery systems after retiring from vehicular services for stationary applications.
According to the latter option, second-life batteries are still expected to be capable of storing and delivering substantial energy. It is possible that they satisfy the requirements of stationary applications. Indeed, the total lifetime value of the battery will increase when the remaining capacity of batteries can be invested to meet the requirements of other energy-storage applications, which are less demanded as for EVs. Consequently, the price of the battery systems will be decreased allowing the widespread commercialization of both electric vehicles (EVs) and grid battery systems. Accordingly, there are two scenarios to use the second-life batteries in stationary applications as follows:
- ▪
Classification the batteries into groups based on their characteristics (i.e., the remaining capacity, shape, and size) and select the most suitable application for each group; and
- ▪
Reconfiguration of all types of batteries in the same application by using the proper power electronics converter.
Since non-standardized battery modules are used in different patterns of the EVs, it is challenging to find battery modules possessing the same capacity level. Therefore, this research work focused on the second scenario in order to integrate different levels of second-life battery modules into one economic battery storage system.
A limited number of studies of using the second-life battery systems for the stationary applications have been reported in the literature, and they can be divided into two main categories based on the interface converter [
8,
9,
10,
11,
12,
13]. Firstly, all the used-battery cells could be assembled in one package, and it is integrated with load or into the grid through a traditional two level converter [
8,
10,
11,
12]. According to [
12], the authors presented a feasibility study of integrating a second-life battery pack with an off-grid photovoltaic (PV) vehicle charging system. This system has a PV array to charge a battery pack via a maximum power point tracking (MPPT) controller, and then the battery system charges a vehicle via a two level inverter. The second-life battery pack has 135 LiFePO
4 based battery cells, which have been connected in series and parallel to provide a 13.9 kWh. Experimental results revealed that the used-battery system successfully achieved the desired function with a simple system structure and control methods. Another example, in [
11], the authors developed a 20 kW PV panels (on the roof top of the test bed), five EVs, (Mitsubishi i-Miev G) and five second-life battery systems. This system aims to achieve a peak-load shifting by utilizing EVs, used battery systems and PV panels. This study revealed that the application of EVs and second-life EV batteries in supporting certain small-scale EMS is feasible. However, the overall reliability and service continuity of the whole system could be affected by the number of series connected battery cells. Accordingly, if only one cell fails, the entire module also fails because of the series connection of the batteries.
Secondly, the second-life battery cells could be assembled in isolated small modules, and they are integrated with load or into the grid through multi-level or multi-port converter [
13,
14]. According to [
13], the authors proposed a modular boost-multilevel buck based converter topology and a module-based distributed control architecture. This study revealed that the performance of battery module can be evaluated based on weighting factors, which are dependent on initial SoC, voltage, impedance, and capacity, focusing on single phase applications. Therefore, this article focuses on three-phase grid integration. In addition, two levels of management strategies has been achieved as follows:
- (1)
Cell level: using battery management system (BMS) for protecting battery cells against over-charge and over-discharge and balancing the cells that are connected in a series.
- (2)
Module level: developing EMS with the aim to manage the energy flow and for distributing the load demand among the second-life battery modules.
In this article, a multi-port converter was supported by the energy management strategy (EMS) to control the power/energy flow among the used-battery modules. As a rule, the energy management concepts can be categorized into two main types: (1) rule-based; and (2) optimization-based energy management concepts [
15,
16,
17,
18]. These concepts are well suited for real-time applications. In case of optimization-based approaches, using these approaches lead to achieve the minimization of a cost function. However, a complex algorithm is needed to implement the optimization-based approach, while the rule-based control strategy provides a simple algorithm for controlling the energy flow among multiple DC sources.
The main objective of this paper is to develop an energy-management control strategy in order to control and distribute the power demand among three second-life modules under different load conditions and disturbances. The proposed generic energy management strategy (GEMS) has been developed for flexibly integrating different levels (i.e., size, capacity, and chemistry type) of the second-life battery modules into the grid through a multi-port converter. In this manuscript, a GEMS has been designed, implemented and analyzed based on the rule-based control strategy. In the following sections, the second-life battery module prototypes are explained in detail. Then, the experimental results are provided to realize the concept of the proposed GEMS.
2. Prototype Description of Second-Life Battery Modules
In the past five years, more than 700,000 total plug-in vehicles (plug-in hybrids and pure battery electrics) have been sold worldwide by the end of 2014 compared to about 400,000 at the end of 2013 [
19]. Among the available battery technologies, it is clear that the current two main battery technologies used in EVs are nickel metal-hydride (NiMH) and lithium-ion (Li-ion). Due to the potential of obtaining higher specific energy and energy density, the adoption of Li-ion batteries is expected to grow fast in EVs, particularly in PHEVs and BEVs. Therefore, this research study focused on Li-ion batteries.
One of the safest lithium ion battery chemistries is the lithium iron phosphate battery (LiFePO
4), also called LFP battery, which is attractive solution compared to other chemistries due to its low cost, low toxicity, flat charge/discharge voltage and relatively good cycle life [
20]. Thus, in this manuscript, the LiFePO
4 batteries have been selected in order to investigate the potential of using this technology for second-life batteries for stationary applications.
According to US Council for Automotive Research (USCAR), the second-life batteries are the batteries that are retired from the vehicle when they can no longer provide 80% of the rated capacity (needed for vehicle range) [
21,
22,
23]. Accordingly, one of the main tasks in this research project was how to provide the used-batteries (remaining capacity ≤80% of rated capacity), which can be used to evaluate the performance of the used-batteries and to build three second-life modules. Therefore, 27 new cells (7 Ah high power cells, Energy Innovation Group Ltd. (EIG), Korean-Based ISO/TS16949 Certified Manufacturer, Cheonan-si, Korea) have been aged using different charge/discharge profiles in the laboratory. The EIG battery is a pouch cell with LiFePO
4-based cathode and carbon-based anode, where the electrical parameters of the EIG cells are provided in
Table 1. This technology was designed for using in HEVs according to the manufacturer datasheet.
All tests (i.e., lifecycle, and characterization) have been carried out in two laboratories (Battery Innovation Center laboratory at Vrije Universiteit Brussel and energy laboratory at Vito in Mol, Belgium) by using PEC battery tester, which is developed by PEC Company (Leuven, Belgium), as shown in
Figure 1.
Based on factual application, the used-battery pack, which was used in PHEV and retired after more than five years of usage, has been included in this evaluation. As shown in
Figure 2, this pack has been dismantled into blocks and randomly 35 blocks have been taken for evaluation, and then they refurbished for the second use in stationary applications.
Table 1 shows the electrical parameter of the used-battery cells (LiFePO
4-18650 cylindrical).
Finally, the battery cells and blocks have been tested and sorted with the aim to refurbish these batteries, and then integrate them into the grid.
To evaluate the performance of the second-life battery modules in stationary applications, an experimental setup of three second-life modules, which have been integrated into the grid by using a multi-port converter and a three-phase inverter. A setup is also developed and used to verify the viability of sharing the load demand among the second-life modules by using the proposed GEMS, as will be presented in the following section.
Figure 3 shows the block diagram of the overall experimental system that used in the Vito’s laboratory.
In the framework of this research, a distributed power system (DPS) has been used to implement three-phase grid-connection up to 11 kW with a constant voltage of the DC link at 700 V and three independent bidirectional DC/DC converters. The nominal current of each DC/DC converter in DSP is 32 A. As can be seen in
Figure 3, Real-Time Target (RTT) is used to run both slow and fast varying control loops. Moreover, the RTT can be programmed and operated through Matlab/Simulink (
Figure 3). It communicates with power modules (i.e., DC/DC converter, and three-phase inverter) and measurement sensors (i.e., current, and voltage sensors) via the Ethernet communication protocol. Thus, all control algorithms can be realized as block diagrams in Matlab/Simulink, following which, the Real-Time Workshop automatic code generator translates these block diagrams to C-code, compiled and executed on the Real-Time Target.
Furthermore, three second-life battery modules have been built and integrated into the grid through the DPS, as shown in
Figure 3. The second-life battery cells and blocks have been refurbished in order to build three second-life battery modules. The battery cells and blocks have been assembled in series to build one battery module (Module 1) by using 15 EIG (7 Ah) battery cells, and an additional two battery modules (Modules 2 and 3) based on 30 battery blocks (15 blocks per module).
Table 2 shows the discharge capacity retention (
DCR) of the used-battery cells/blocks, which have been used to build three second-life battery modules. The selection of the used-battery cells/blocks, which have been assembled in the same battery module, relied on the feasible equality in the
DCR that was measured at 1
It. According to the International Standard IEC61434 [
26],
It (A) is the reference test current, which is expressed as
where
Cn can be define as the rated capacity, which is measured during a specific time
n (h), of the battery cell.
Practically, the used-battery cells/blocks have been selected at the lowest possible difference in the DCR (9% in module 1 and 5% in modules 2 and 3) as listed in
Table 2.
The verification of the proposed EMS that was designed for the second-life battery system will be discussed in the following section. Two types of used-battery modules have been designed and implemented. In the first type, the battery cells have been assembled in one module (Module 1), which can be used to provide approximately 6 Ah and 0.7 kW (rated power). The second type consists of two modules (Modules 2 and 3) that are utilized to produce 3 kW (rated power) and relatively high capacity (~26 Ah) compared to Module 1. The electrical parameters of the second-life modules used in this study are reported in
Table 3. In general, the efficiency and the Ah discharge of the used-battery cells/blocks increases with decreasing the charge/discharge current rate (≤2
It). Consequently, the rated power of these battery modules is computed by multiplying the voltage (almost flat ~50 V) and the rated current (2
It).
To connect the second-life battery modules to the DSP, these battery modules consist of 15 battery cells/blocks, which have been connected in series, to produce a sufficient output voltage (~50 V). As a rule, connecting battery cells in series opens up the possibility of cell imbalance between identical battery cells in the same string. In case of the second-life battery cells, additional imbalance occurs due to the difference in the
DCR (
Table 2). Hence, the importance of using a BMS strongly appears with the aim to overcome the imbalance in the voltage and capacity of the used-battery cells. Among the commercial BMS types (i.e., passive or active), the passive BMS is adequate to build a low-cost and simple battery balancing system.
Commercially, most BMSs (passive) available in the market provide almost the same functions, such as:
- ▪
measuring parameters (i.e., voltage, current, temperature, and internal resistance);
- ▪
safety protection to protect the battery cell against over-temperature, over-charging, over-discharging and charge/discharge current limit; and
- ▪
Communication unit by using isolated RS-485 and/or CAN-bus.
However, the balancing current and the price of the BMS were the main criteria that were identified in order to select one of them.
Regarding the balancing current, the required balancing time mainly depends on the amplitude of the balancing current, and it can be computed by: imbalance in capacity (Ah)/the balancing current (A). As can be seen in
Figure 4, the required balancing time has been computed to eliminate the imbalance in capacity (9% for battery cells and 5% for battery blocks) of battery cells/blocks at different balancing current levels (100 mA, 150 mA, 450 mA, 1000 mA, and 1300 mA). The results of this calculation revealed that the balancing time can be clearly decreased by increasing the balancing current. Therefore, passive BMS was selected due to its lower price (€295) and relative higher balancing current (1300 mA) compared to other BMS modules.
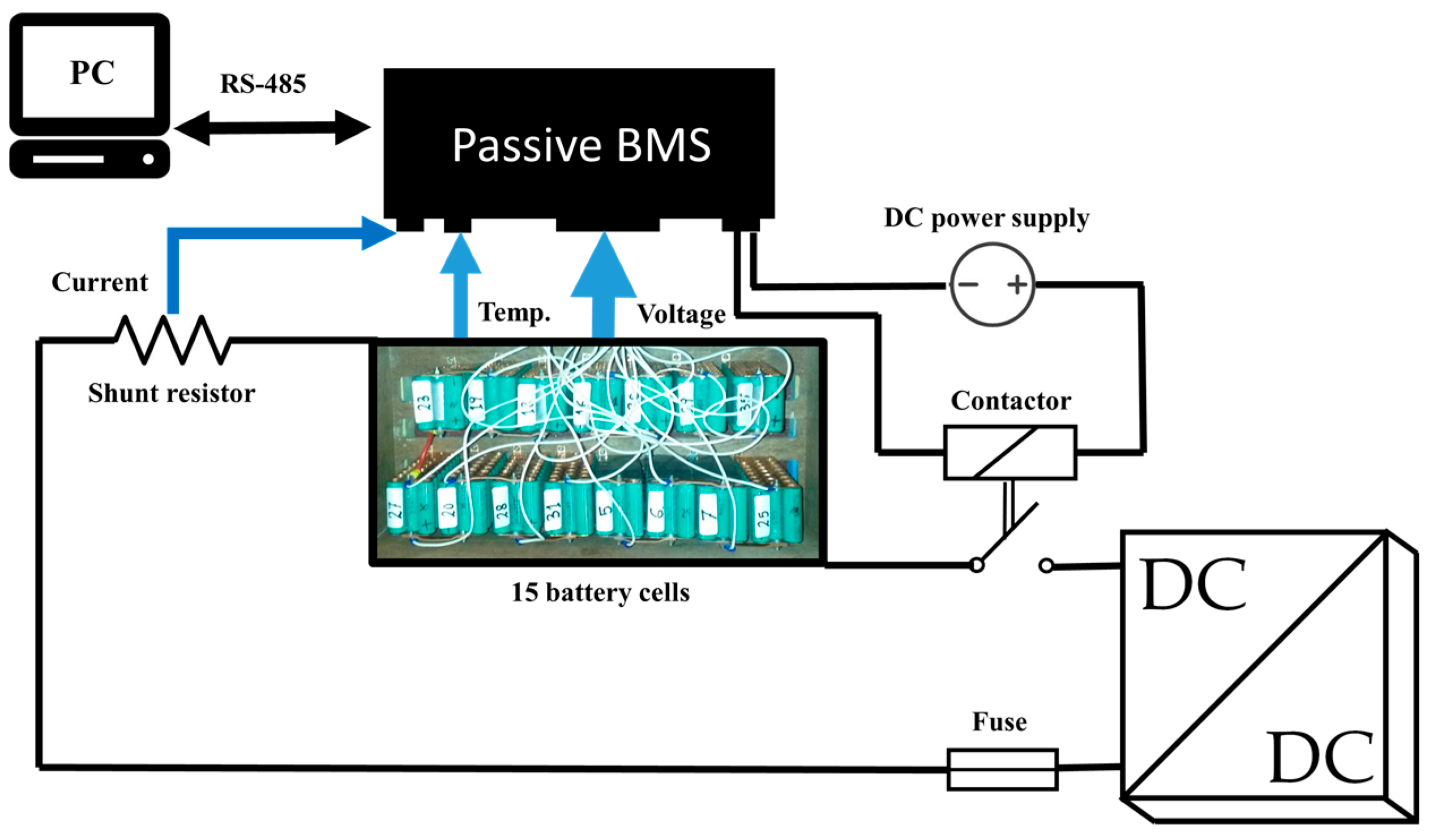
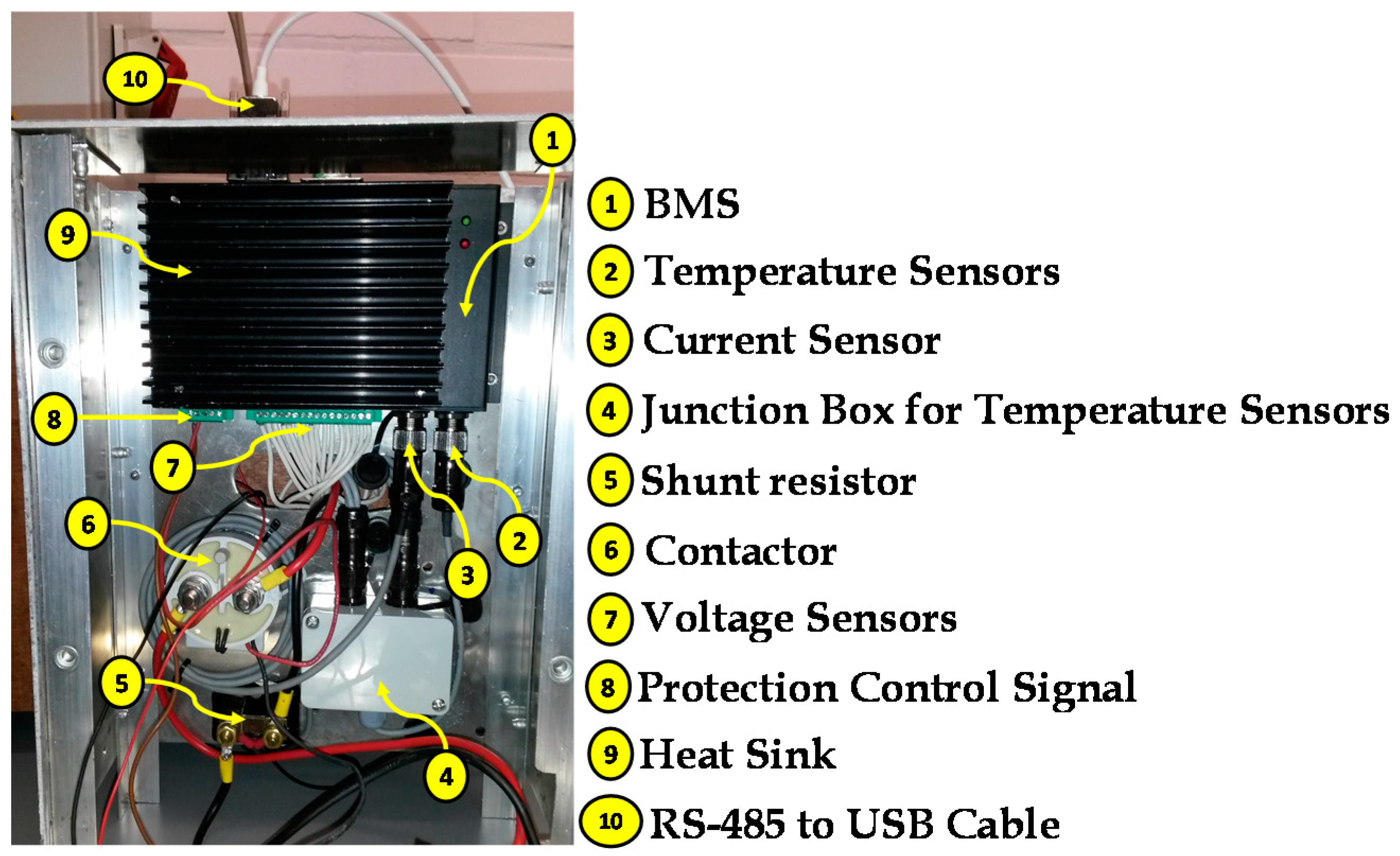
As shown in
Figure 5 and
Figure 6, the BMS utilizes a passive BMS to equalize the voltage of the battery cell by using 15 ohmic resistors (switched shunt resistors BMS). The BMS has the ability to protect and balance the battery cells by monitoring battery cell voltage, current, and temperature. The BMS measures the battery module current via a low-side precision shunt ohmic resistor (±0.25% accuracy). The shunt ohmic resistor consists of a four-wire Kelvin connection, which is used to measure the voltage drop across the resistor. In addition, a short shielded cable (50 cm) is used to connect the shunt ohmic resistor and BMS (
Figure 6). To filter out the current spikes or noise, the BMS has a high precision analog-to-digital converter (ADC). The temperature of the battery module is monitored by eight temperature sensors.
The passive BMS dissipates the balanced energy and causes an undesirable BMS temperature rise. Thus, extra power consumption is needed for cooling. As shown in
Figure 6, a heat sink and cooling fans have been used to maintain the BMS’s temperature within the desirable level (≤40 °C).
To clearly show the importance of using a cooling system with the passive BMS,
Figure 7 illustrates the experimental results of balancing 15 battery cells with and without cooling system. In Zones A, B, and C (without cooling), it is clear that the BMS could not complete the balancing (
Figure 7) in order to protect the circuit from over-heating (>40 °C). The BMS with cooling system (Zone D), the BMS’s temperature becomes more stable and heats up slowly, and thus can achieve the balancing among the battery cells, as shown in
Figure 7.
Finally,
Figure 8 depicts the prototypes of three second-life modules that were used in this research work.
3. Design of Generic Energy Management Strategy
As mentioned previously in
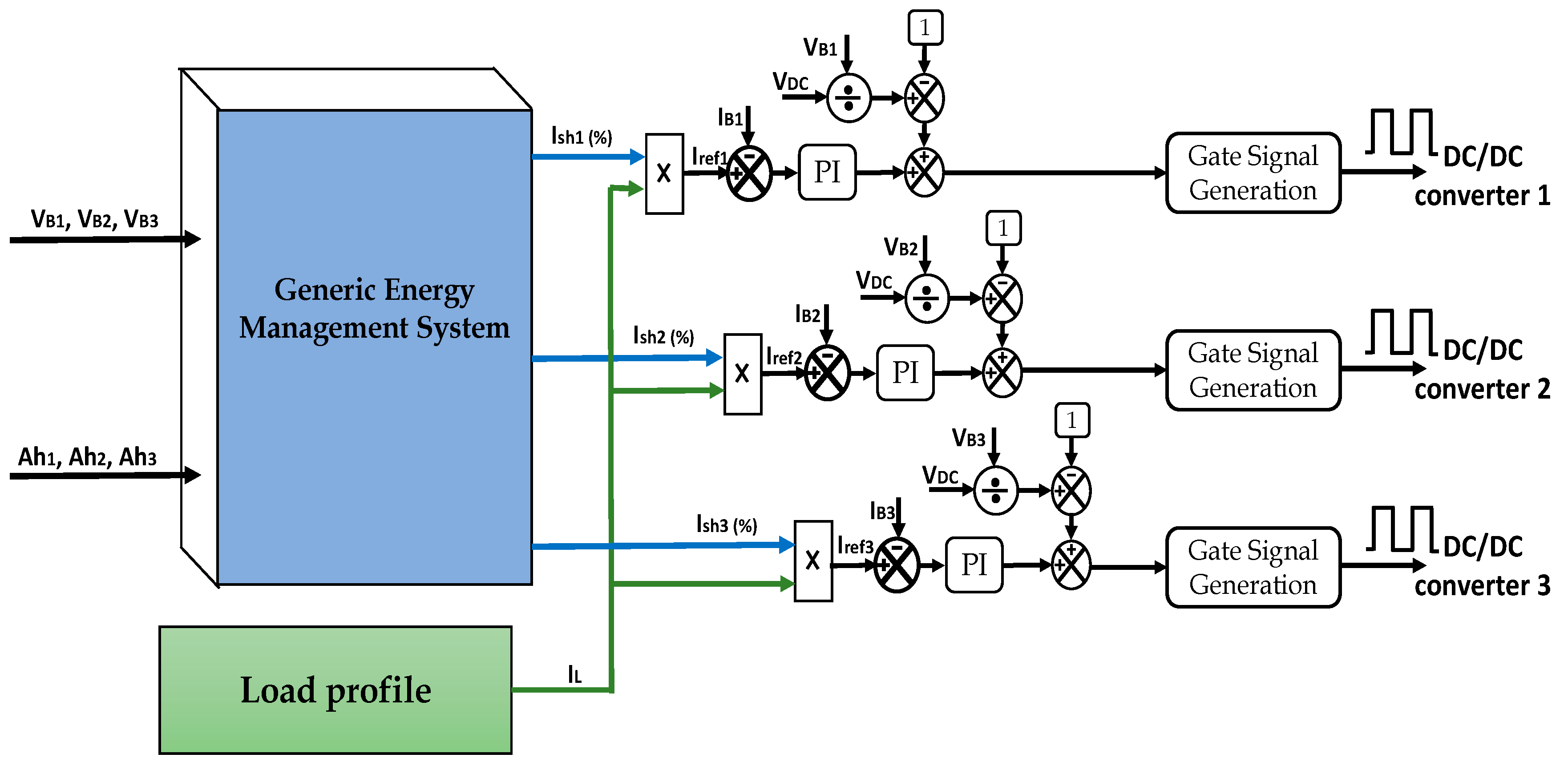
Section 2, the EMS and all control algorithms have been implemented as block diagrams on Matlab/Simulink. The control algorithms for generating the gate pulses (10 kHz switching frequency) of the DC/DC converters and the DC/AC converter have been already designed on Matlab/Simulink. Based on this available design (
Figure 9), each DC/DC converter is controlled by using closed-loop proportional-integer (PI) controllers (current control). To maintain the DC link at constant voltage (i.e., 700 V), the ratio of battery module voltage (
VB) and the voltage of the DC link (
VDC) is added to the output of the PI-controller to produce the desired duty cycle. This duty cycle is converted to gate signals by using drive control toolbox on Matlab/Simulink, as shown in
Figure 9.
Therefore, this article focuses on developing an efficient GEMS of multiple energy sources, particularly for the second-life battery modules. As can be seen in
Figure 9, the inputs for the GEMS are the voltage and Ah of each battery module. Based on the performance of the used-battery modules, the GEMS provides the sharing percentage of the load demand among the battery modules. Accordingly, the charge/discharge current value of each module is adjusted based on the GEMS output, which is used as a reference signal to realize the closed-loop current control strategy. The self-consumption of PV profile (see
Appendix A) was also implemented as a block on Matlab/Simulink with the aim to verify the proposed GEMS, as shown in
Figure 9.
The main function of the proposed GEMS is to distribute the load current among the used-modules based on their performance. The voltage (
VB) and capacity (Ah) of the battery modules have been selected to evaluate the performance of each module. In general, the Ah of each battery module is basically computed by using a Coulomb counting technique [
27,
28], which can be expressed as:
where
SOCint is the initial value of
SoC,
iB is the battery current (positive during charge and negative during discharge), and
Cm is the measured capacity at 1
It, where
i is the number of battery modules. The initial value has been determined by using a predefined
SoC versus open circuit voltage (
OCV) lookup table. As a consequence, the initial capacity (
Ahint) of each battery module can be computed based on Equations (2) and (3):
In general, the instantaneous capacity of any battery module can be calculated by Equation (4):
By substituting Equation (1) into Equation (4), we can instantaneously calculate the capacity of battery module:
Based on the voltage and the current of each battery module, the output power of battery module can be computed as follows:
To simply evaluate the performance of each battery module, these factors (voltage and capacity) are combined into one control factor, which is called the voltage-capacity-ratio (
VCR), and it can be computed by Equation (9):
However, it has raised an important question about the relevance of using a
VCR (V/Ah). In case of renewable energy applications (i.e., self-consumption of PV profile), the battery modules are used to manage the fluctuation of the renewable source (see
Figure A1 in
Appendix A). The required current from battery modules may suddenly change from low to high value in few seconds for specific period based on the nature of renewable sources. The fast dynamic load profile will reflect an oscillation in the voltage of battery modules. This oscillation in battery module’s voltage can be amplified by multiplying the voltage by capacity (V·Ah), which will negatively affect the performance of the EMS. In contrast, the
VCR factor has the ability to reduce the oscillation in voltage due to the voltage is divided by the Ah.
Figure 10 shows the simulation results of the battery module (6 Ah, 50 V) with the aim to compute the oscillation in the
VCR and V·Ah factor due to using fast dynamic current profile (from 5 A to 30 A in 5 s). It is clear that the oscillation in
VCR is lower (~0.2) than in V·Ah factor (~20). This is the reason why the
VCR factor was selected in this research work.
In the proposed GEMS, the
VCR of each battery module is calculated in order to identify their performance during the operating process. In
Figure 11, the inputs of the GEMS are the voltage and Ah of the three used-battery modules. Based on the voltage and Ah, the
VCR is determined, and then the lowest
VCR is computed by using Equation (10):
It is important to point out that the GEMS is designed to share the load demand among the high performance battery modules, which have higher
VCR. The battery module with the lowest
VCR will not participate in feeding the load, and the lowest
VCR is used as a reference level to compare among the other modules’ performance. Therefore, Δ
VCR indicates the performance difference of the used-battery modules (see Equation (11)). Afterwards, the Δ
VCR is converted to per-unit value and limited between 0 and 1 with the aim to compute the sharing factor (
SF) (see Equation (12)). Consequently, the sharing current (
Ish) for each battery module can be determined based on Equations (13) and (14):
where
n is the total number of battery modules, and
I = 1, 2, …,
n.
As a result, the desired battery module current can be computed based on multiplying the sharing percentage (
Ish) by load current (
IL) as follows:
According to Equations (5), (8) and (15), one can observe that the power flow from battery side to AC side mainly depends on the VCR of each battery module, which in turn reflects the performance of each battery module.
For instance,
Figure 12 shows how the load demand is shared between battery modules 1 and 2 based on the level of the
VCR of each module. It is clear that the load current is equally shared (50%) between battery modules 1 and 2. In addition, battery module 3 is not participating in feeding because it has the lowest
VCR level. The experimental results and the validation of the GEMS concept will be presented in the next section.
In the case of using different sizes of the second-life battery modules (i.e., 6 Ah, 26 Ah, and 26 Ah) in the same application, the Ah level of the used-battery modules should be fixed at the same level, and thus the system can simply assess their performance. This is the reason why the capacity of the first battery module (Ah1) was multiplied by a calibration factor (26/6 = 4.33).

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}