1. Introduction
Wind power generation, as an important clear energy resource of modern power grids, has been developing rapidly over the past several years [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14]. It is reported that the global wind power capacity increased from 370 GW in 2014 to 432 GW in 2015, representing a 17% annual growth rate [
15]. It is also anticipated that the global wind power market will continue to grow steadily in the coming years [
16,
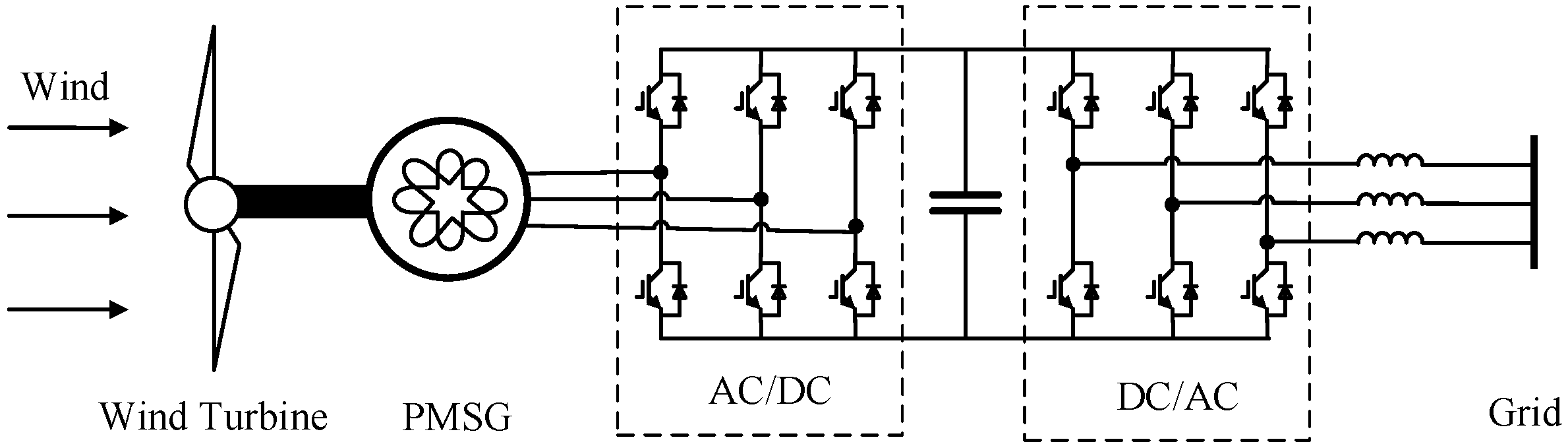
17]. In practice, wind energy conversion systems (WECSs) are commonly used to convert wind power to electric power and further deliver the electricity to power grids. It is crucial to increase WECS efficiency to make wind power generation reliable and profitable.
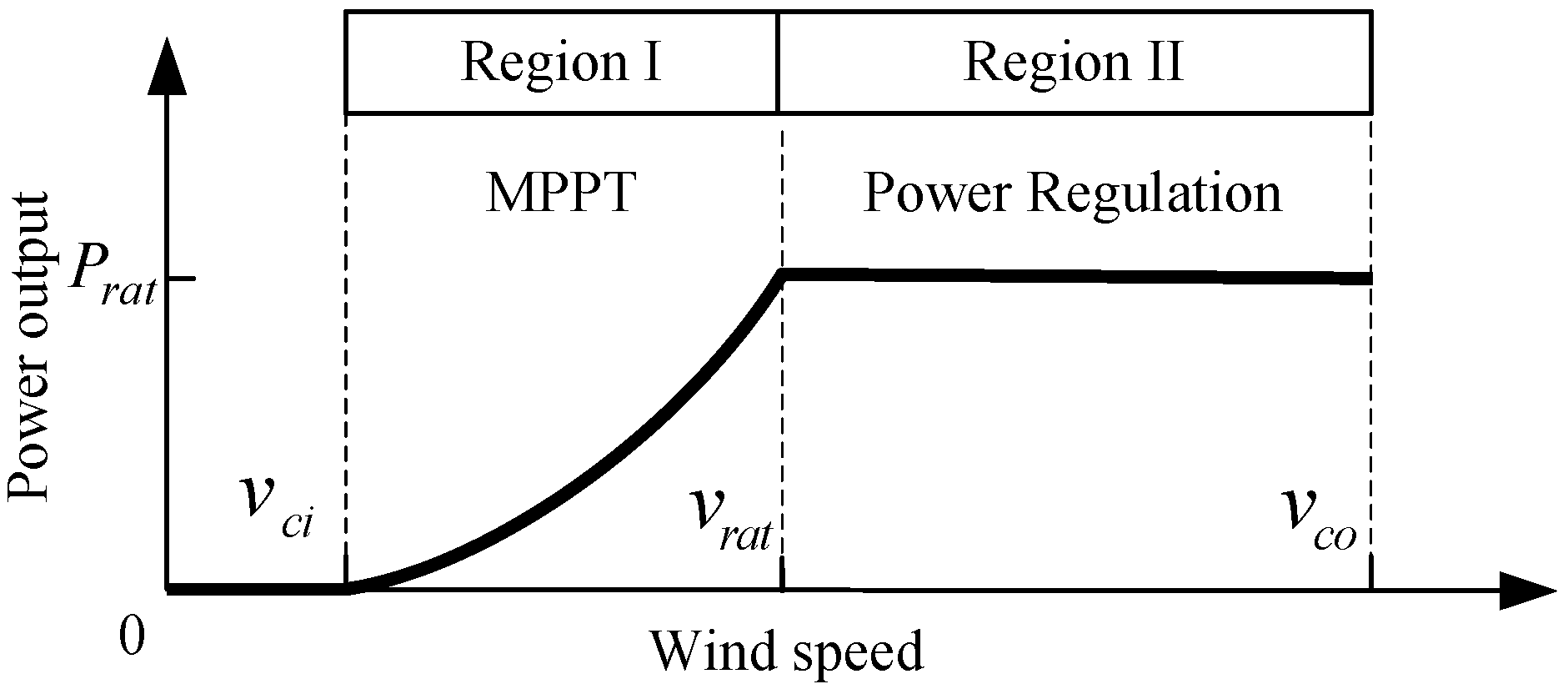
Maximum power point tracking (MPPT) plays a decisive role in WECS efficiency. It was reported in 2004 that more than 50% of annual power capacity of a typical wind turbine came from MPPT [
18,
19]. Now, the percentage should grow, since an increasing number of wind turbines are being installed at low and medium wind speed sites [
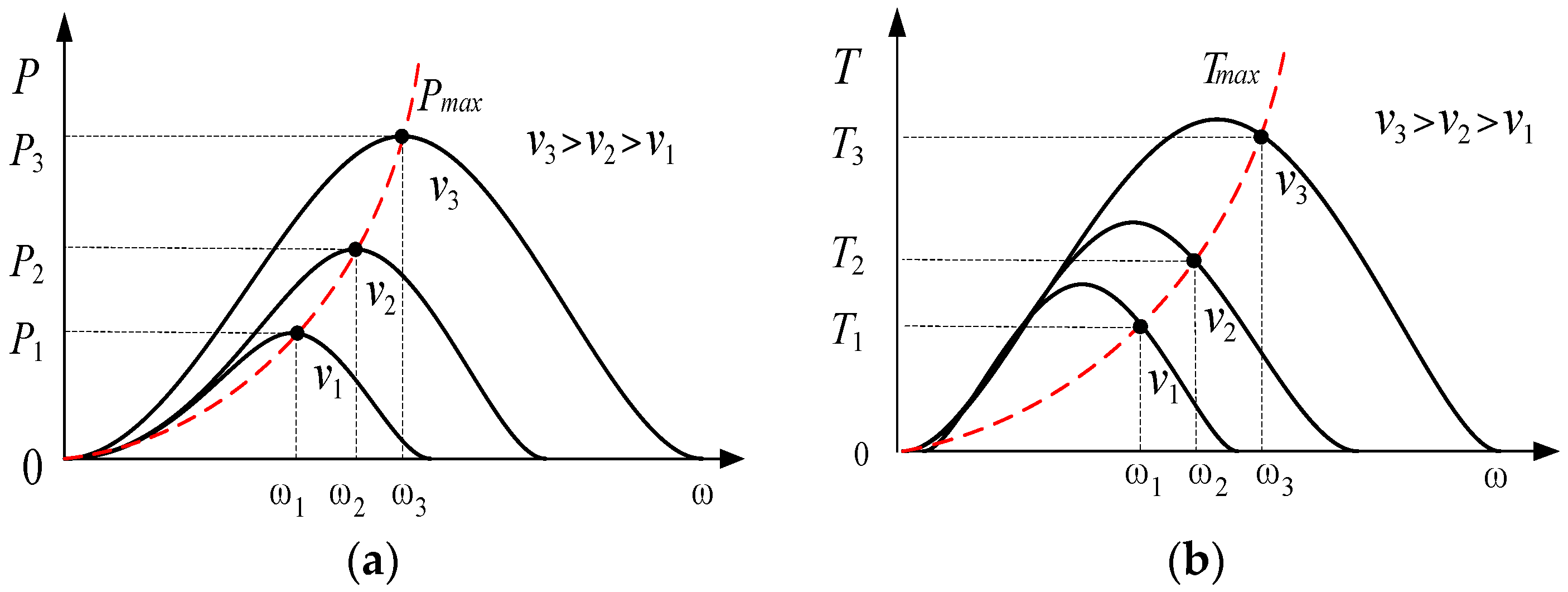
20]. Conventional MPPT control methods can be roughly divided into three categories: tip-speed ratio (TSR) control, hill-climb searching (HCS) control, and power signal feedback (PSF) control. Those control methods are well reviewed in [
1,
3,
21], and the PSF control is viewed as the most favorable one for large-scale WECSs (e.g., multi-MW wind turbines). The PSF control typically tracks the maximum power points via a turbine characteristic curve or a lookup table, and captures the maximum wind power through adjusting electrical power or torque.
However, the actual maximum power points are hard to achieve. A study of National Renewable Energy Laboratory (NREL) shows that a 5% error between real wind power coefficient curves and ideal ones commonly exists in the PSF control. This error lowers MPPT performances and leads to 1%–3% energy loss, which is considered significant in wind energy industries [
18,
19]. Some studies further point out that the error derives from the effect of wind turbine inertia and wind speed fluctuations [
22,
23,
24,
25]. To be specific, the PSF control views MPPT as a static process and assumes that a series of maximum power points can be tracked quickly. However, the real maximum power points are difficult to capture, especially for multi-MW wind turbines and/or under turbulences (e.g., the wind speed has low mean and high turbulent values). Hence, the effect of wind turbine inertia and wind farm turbulences should be considered in MPPT design. This becomes increasingly important, especially under the ongoing trend of building wind farms with large-scale wind turbines and at low and medium wind speed sites [
20,
21,
22,
23,
24,
25].
Furthermore, MPPT in essence is a type of tracking problem, i.e.,
Vref =
V0 +
at, and MPPT performances are related to three factors: the reference speed
Vref, the initial speed
V0, and the acceleration or deceleration
a. The majority of previous studies improve MPPT performances through tuning the acceleration or deceleration. For instance, a decreased torque gain (DTG) control to tune electrical torque gains is proposed in [
26] and an adaptive torque gain (ATG) control to search the optimal gain is presented in [
18,
19]. These two methods are both based on PSF methods and further modified in [
23,
27,
28], which adaptively adjust electrical torques to improve WECS efficiency. In addition, a few recent studies have enhanced MPPT performances through regulating the initial speed, and they make use of historical wind speed data and implement the intelligent initial speed with encouraging results [
22,
29,
30]. Nevertheless, the previous control methods have limitations. They ignore the effect of wind turbine inertia and/or wind speed fluctuations, thus lowering MPPT performances [
31,
32].
In this paper, the potential issues of PSF control, DTG control, and ATG control are investigated, and an improved ATG (IATG) control is proposed. The IATG control especially considers the effect of wind farm turbulences, which is likely more realistic for practicing engineers.
The rest of this paper is organized as follows:
Section 2 introduces classic WECS models and conventional MPPT methods, including the PSF control, DTG control, and ATG control; and
Section 3 investigates the potential challenges of the conventional MPPT methods and proposes an improved MPPT method. Furthermore, the simulation results and comparative analysis are presented in
Section 4, and conclusions are drawn in
Section 5.
3. Improved MPPT Method
3.1. Challenges of DTG Control and ATG Control
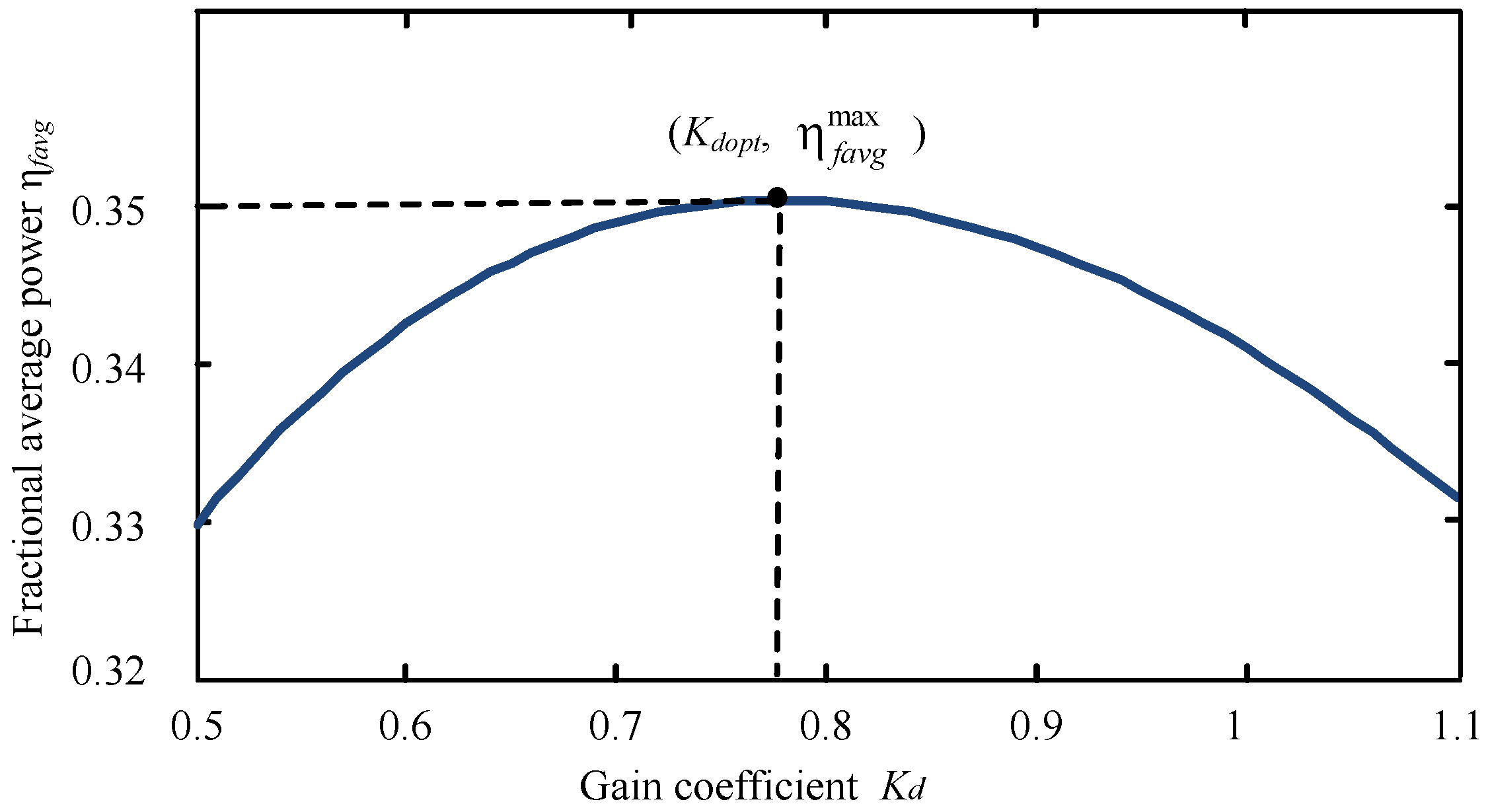
As aforementioned, the DTG control views the optimal gain Kdopt as pre-known and uses the fixed Kdopt based on empirical studies. However, the optimal gain is hard to obtain in reality, and the constant value will become invalid with aging.
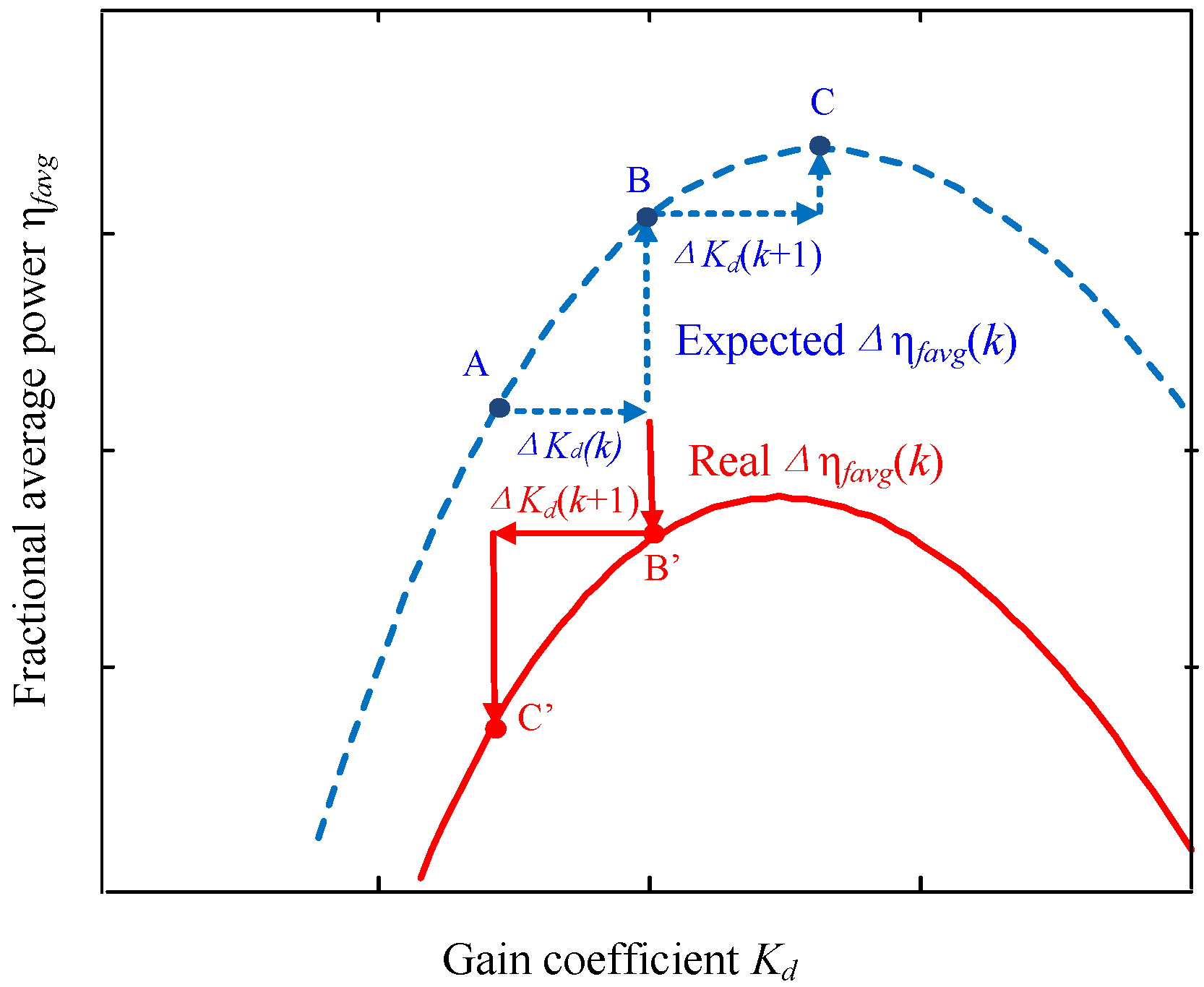
To address this issue, the ATG control customizes the P & O scheme (perturbation as ΔKd and observation as Δηfavg) to adaptively update the optimal gain. Theoretically, the searching direction is determined by the variation of fractional average power Δηfavg, and the observation Δηfavg is decided by the perturbation ΔKd. In reality, since the real-time wind speed is the input of the whole system, the observation Δηfavg is impacted not only by the perturbation ΔKd, but also by the variable wind speed.
Hence, the ATG control ignores the effect of wind speed fluctuations, meaning that it may go to search in the wrong direction and fail to find out the exact optimal gain, especially under rapidly-changing turbulences. For example, as shown in
Figure 5, in the normal ATG control, the WECS is expected to climb uphill and arrive at the
Kdopt point (e.g., the expected Δη
favg(
k) is positive, the WECS climbs uphill, and the searching process is A-B-C); in reality, the WECS may experience a wind speed change and mistakenly travel downhill (e.g., the real Δη
favg(
k) is negative, the WECS travels downhill, and the searching process is A-B′-C′). The ATG control is blind to atmospheric changes, and its P & O rules may lead to MPPT failures.
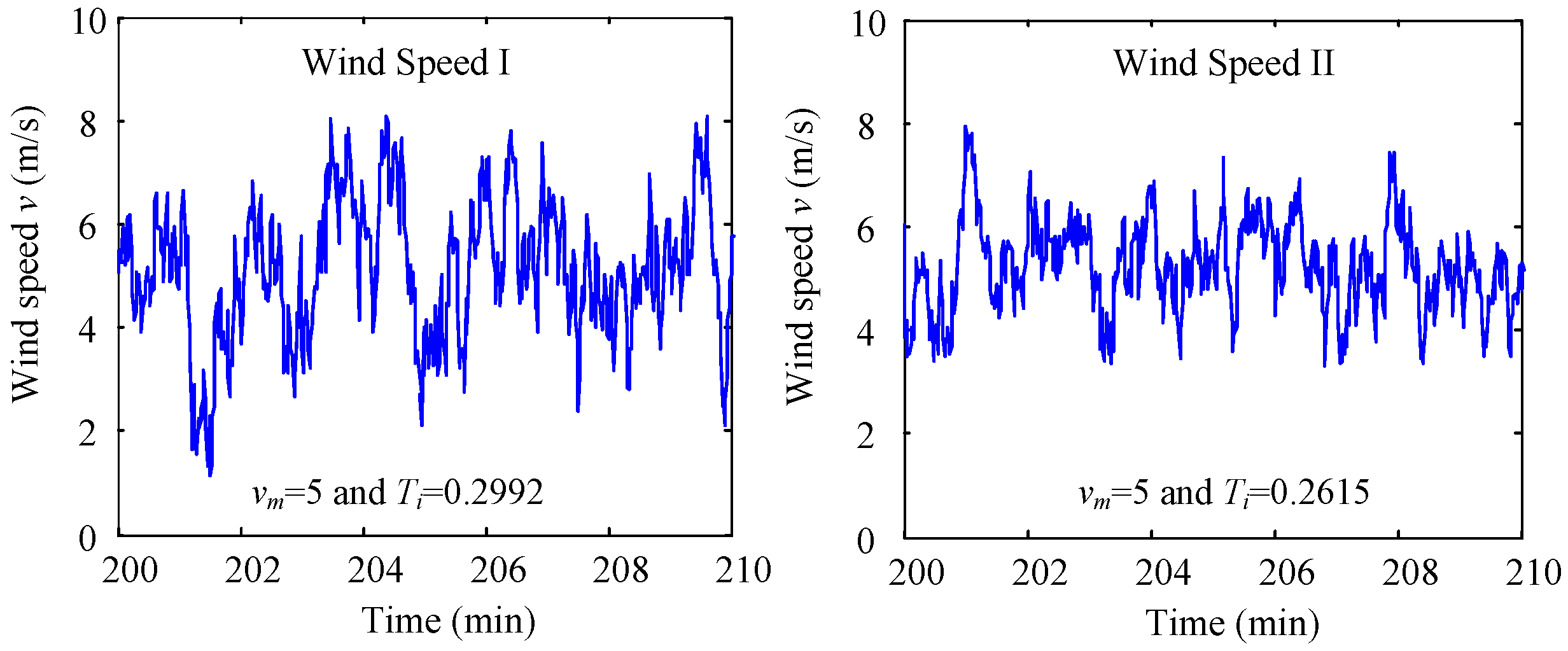
To further investigate the above issue, the ATG control under two different wind speed profiles is tested. Here, the wind speed is featured with two components, including the mean wind speed
vm and the turbulence intensity
Ti. The two wind speed profiles as shown in
Figure 6 are with the same mean wind speed but different turbulences (i.e., Class-A and Class-C turbulences, which represent higher and lower turbulence intensities defined by IEC-614000-1, respectively). Additionally, wind speeds I and II both last 600 min, in which the ATG control runs 20 min per iteration and totally performs over 30 times. In this case, the tractability of the ATG control is tested.
TEST: The gain coefficients obtained by the
kth and (
k + 1)th iterations are denoted as
Kd(
k) and
Kd(
k + 1), respectively, while the real optimal gain coefficients under the
kth and (
k + 1)th wind speeds are denoted as
Kd_real(
k) and
Kd_real(
k + 1), respectively.
Kd_real(
k) and
Kd_real(
k + 1) are calculated by
traversal. In addition, the state “flag” below is used to suggest the correctness of search direction.
As a result, the probability of an incorrect search of the ATG control
Pwrong is counted, and the values of fractional average power under wind speeds I and II are calculated. The corresponding results are presented in
Table 2.
It is found that the ATG control often goes searching in the wrong direction, which lowers MPPT efficiency; this issue gets worse with increasing turbulence intensity.
3.2. Improved ATG control
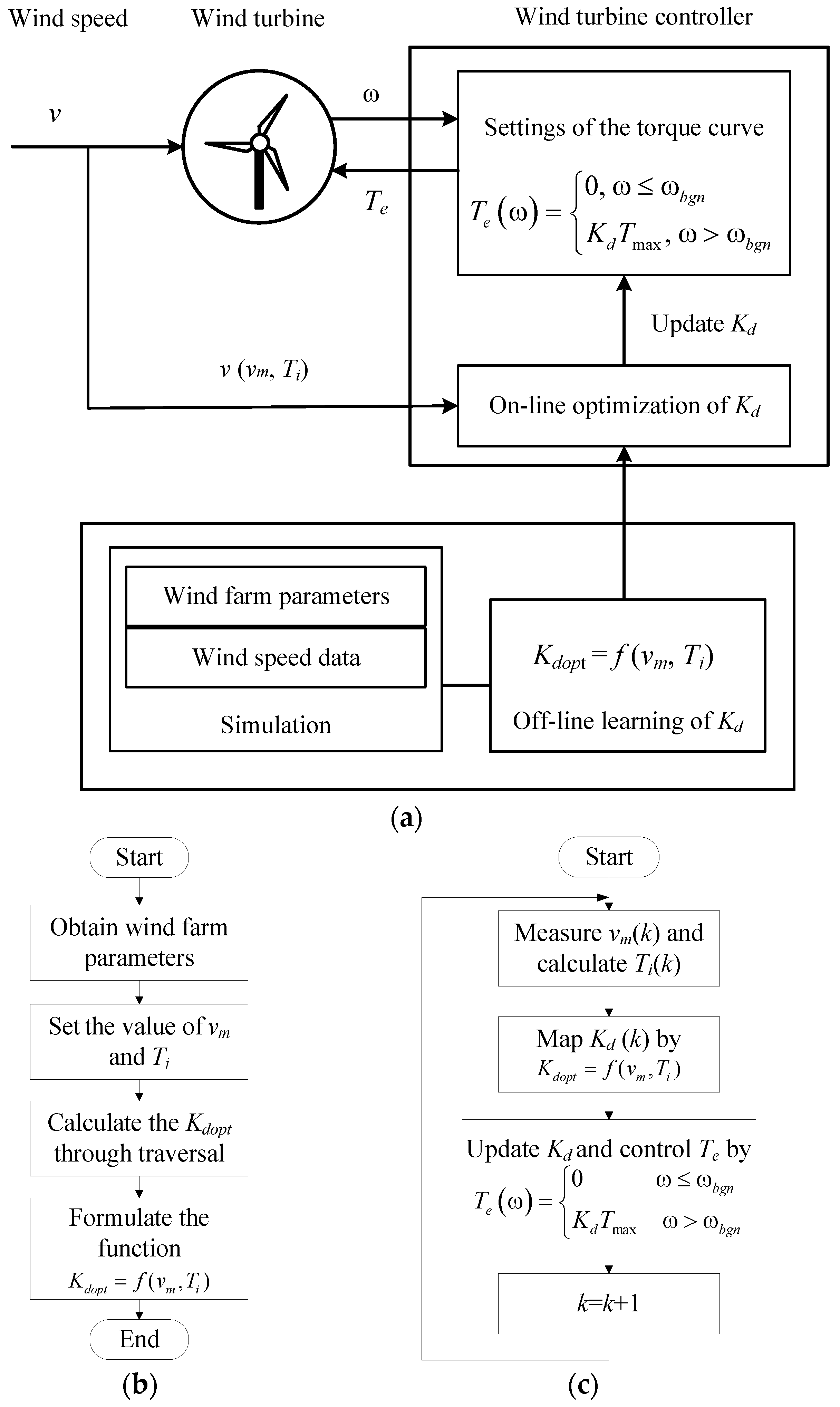
In this paper, an IATG control is proposed, with the consideration of wind speed fluctuations. It primarily consists of two parts as shown in
Figure 7.
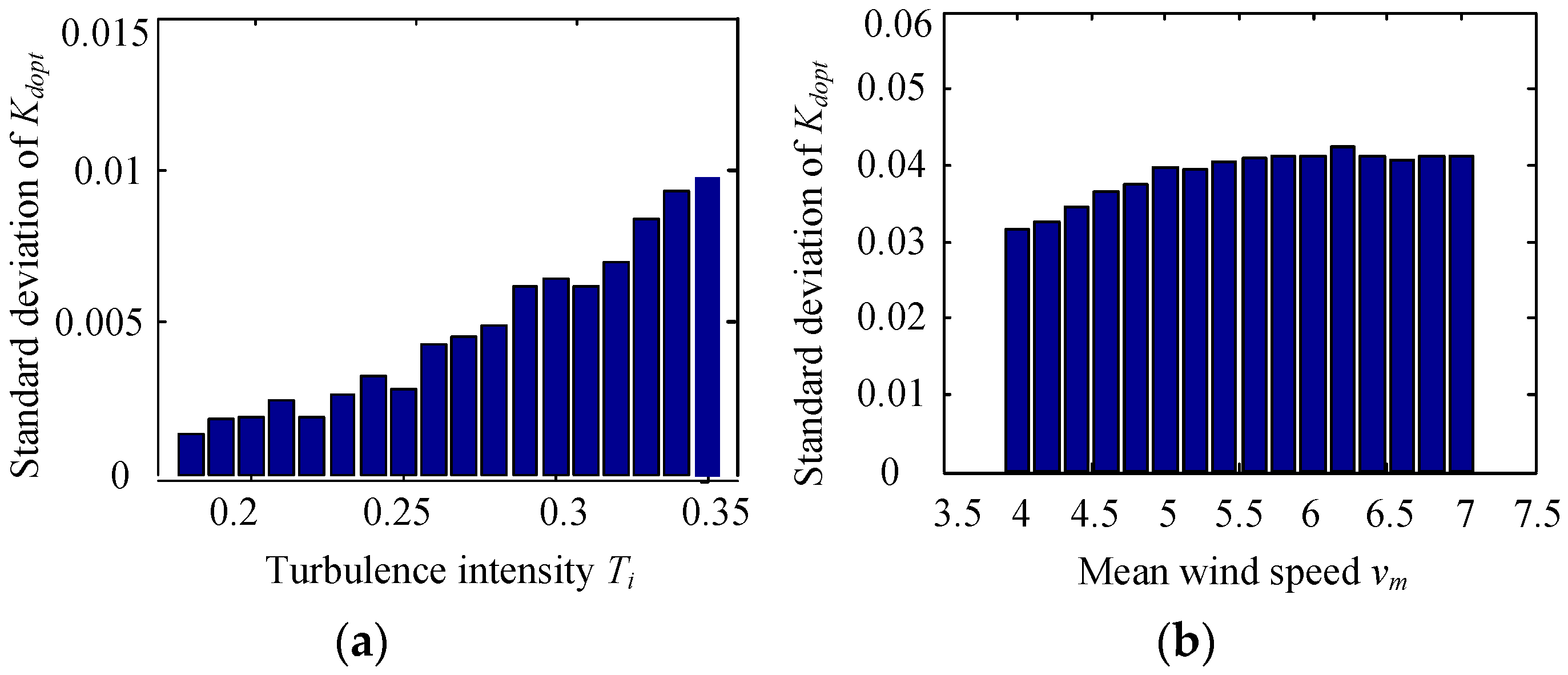
The first part works on the off-line learning of the relationship between optimal gain coefficients and wind speed characteristics (i.e., mean wind speed and turbulence intensity). For a given wind farm, we utilize a great amount of historical wind speed data and the corresponding optimal gain coefficients, and obtain the relationship between optimal gain coefficients and wind speed characteristics via advanced statistical and fitting techniques. Details is given as follows:
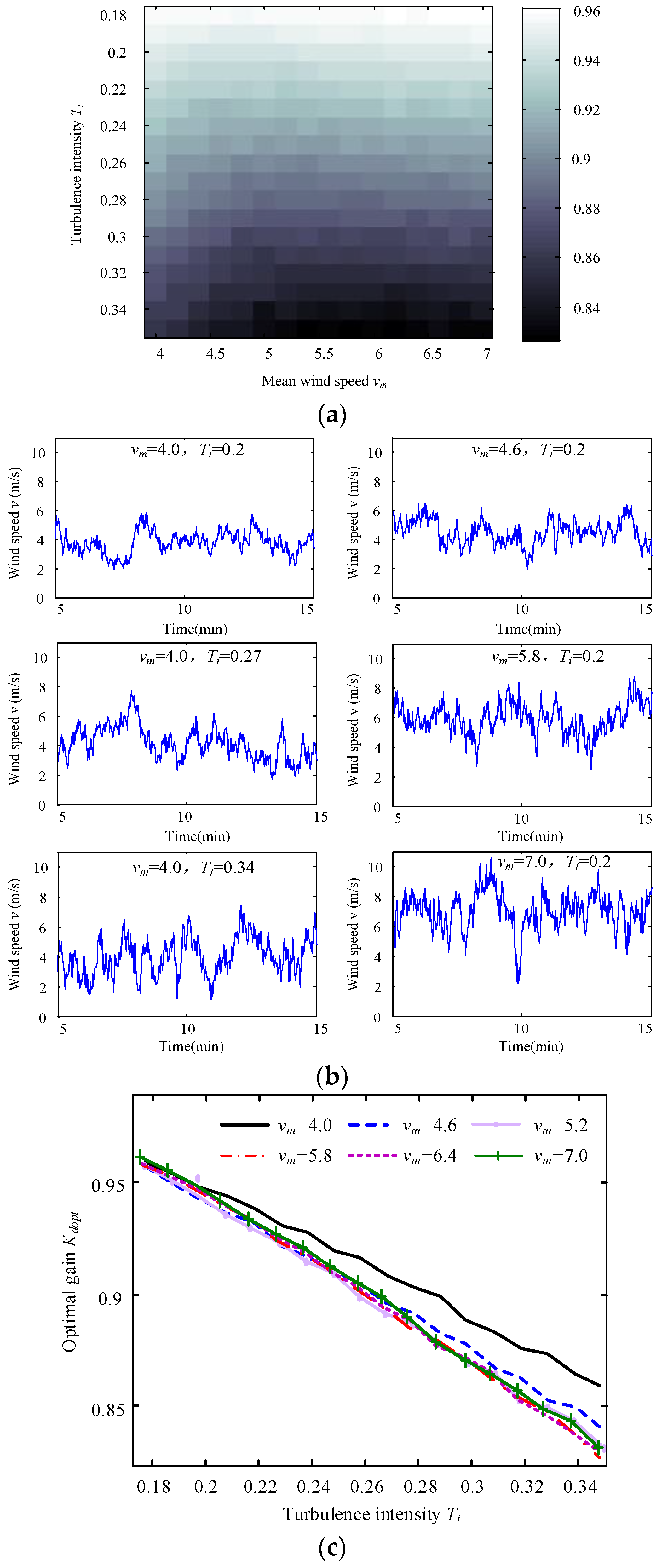
Step 1.1 Data Profiles: Collect wind farm parameters and create a complete set of wind speed data with wind speed emulation techniques [
41]. Here, the low and medium mean wind speeds
vm range from 4 m/s to 7 m/s with the sampling step of 0.2 m/s, the sampling period of 20 min, and the integral length scale as 100. According to IEC-61400-1 standard, the turbulence intensities
Ti of three categories A, B, and C, range from 0.18 to 0.35 with the changing step of 0.01. As a result, there are 288 wind speed profiles in total.
Step 1.2 Simulation: Perform the WECS simulation under different wind speed profiles and obtain the corresponding optimal gain coefficient Kdopt through traversal.
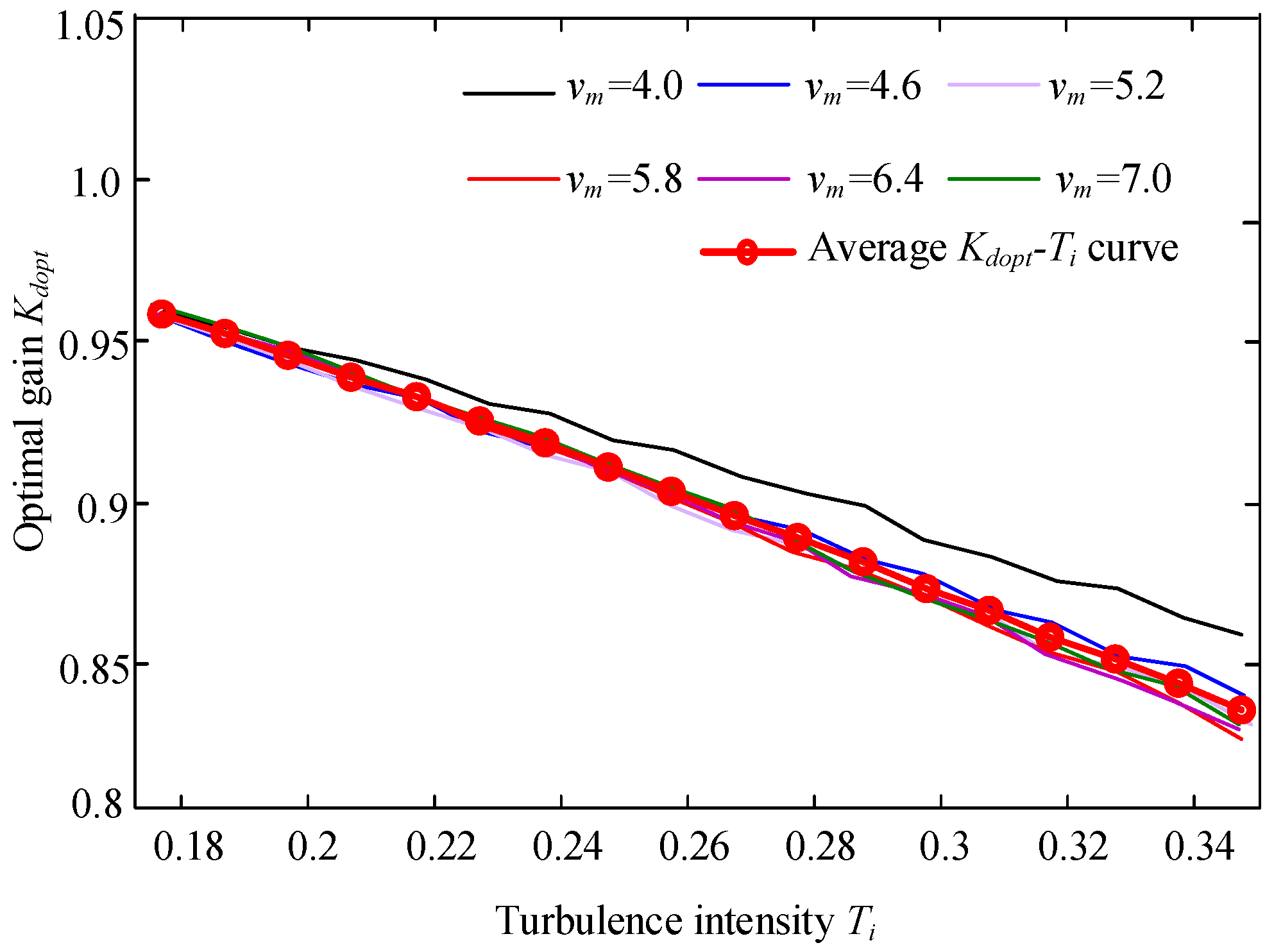
Step 1.3 Formulation: Perform the statistics of the average wind speed vm, the turbulence intensity Ti, and the corresponding optimal gain Kdopt, and formulate the function Kdopt = f (vm, Ti) using least square algorithms.
The second part deals with the on-line optimization of the optimal gain.
Step 2.1 Measurement: Measure the wind speeds within the time period Tw and calculate the corresponding mean wind speed vm and turbulence intensity , where σ(k) and vm(k) are the standard deviation and mean values of the wind speeds within control period Tw, respectively.
Step 2.2 Mapping: Map the optimal gain coefficient Kdopt via and execute the optimal control variable, e.g., the electrical toque Te.
Step 2.3 Updating: After the control period Tk, return to Step 2.1 and let k = k + 1.
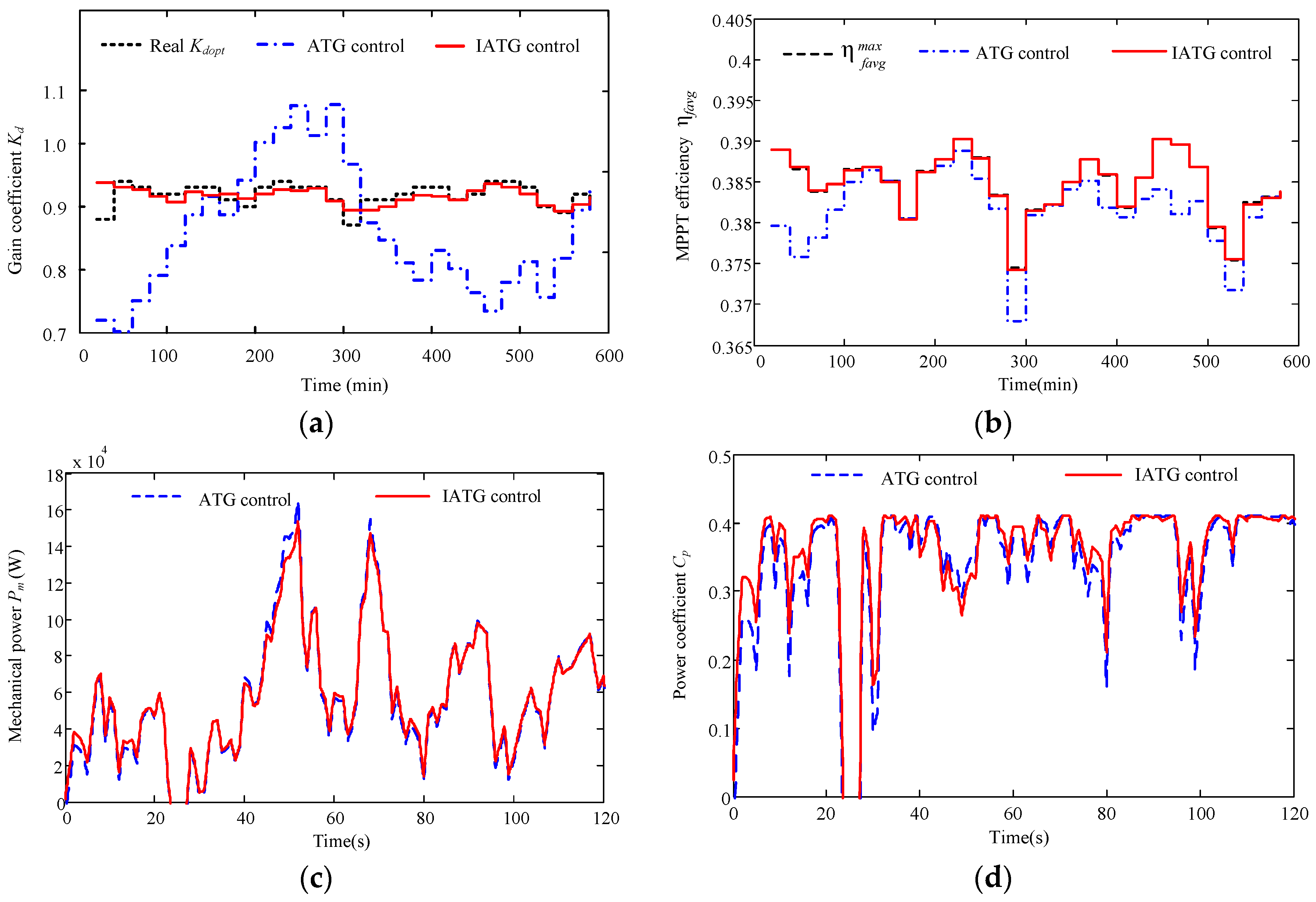
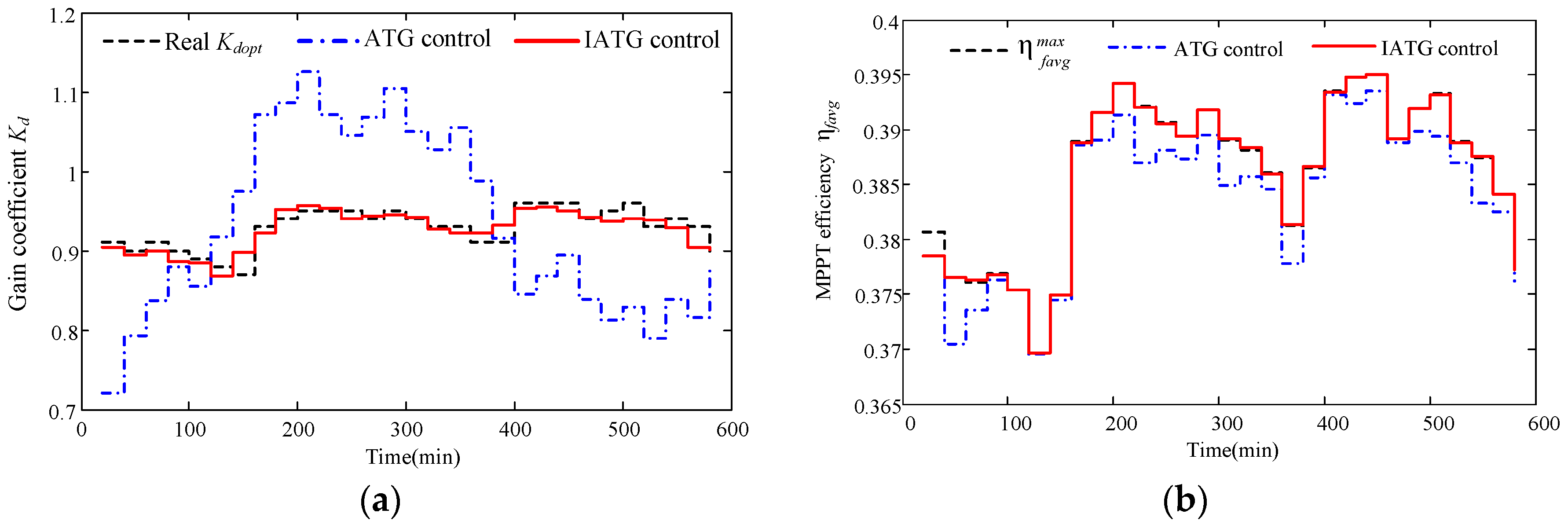
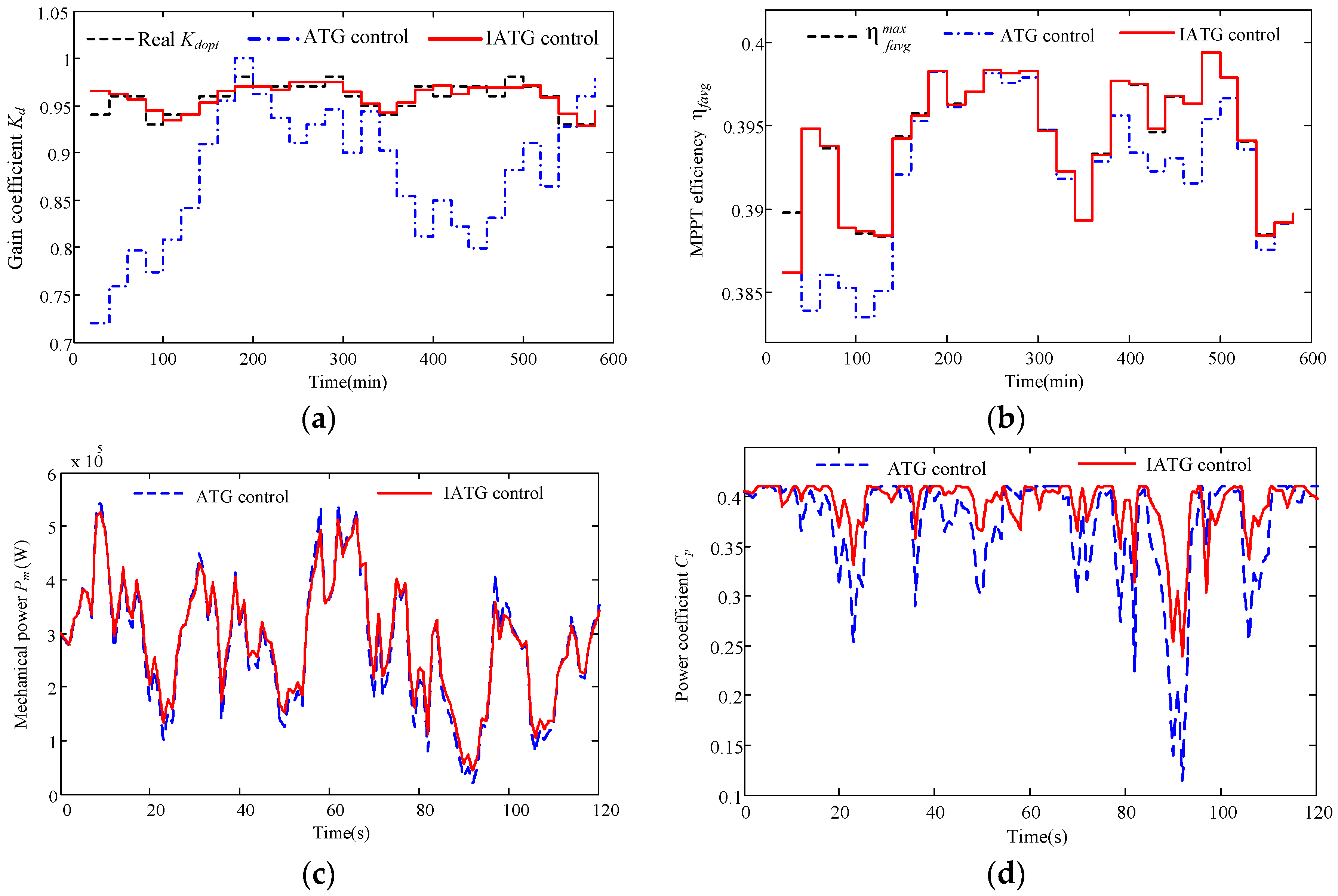
The proposed IATG control considers changing wind speeds and addresses the issue of losing tractability of the ATG control. Specifically, the IATG makes use of off-line learning and on-line optimization, and improves operational efficiency.
5. Conclusions
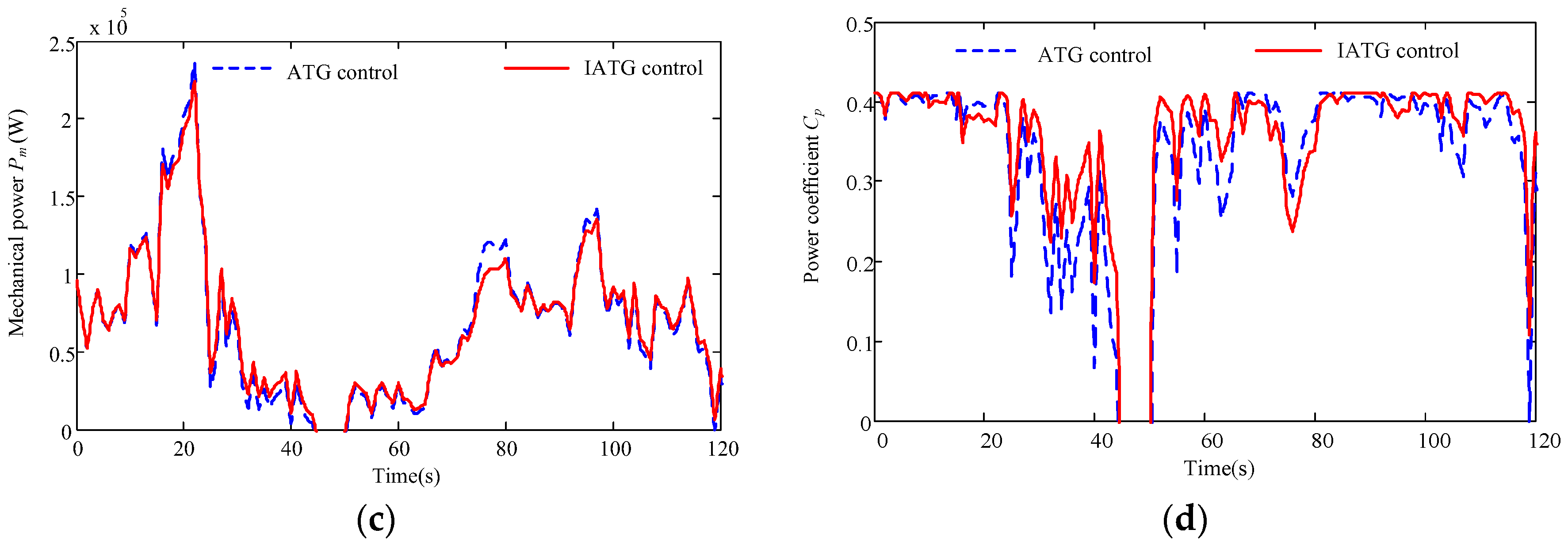
MPPT plays a critical role in enhancing WECS efficiency. However, the majority of conventional MPPT methods view MPPT as a static process and ignore the wind speed changing during the control period, which leads to significant wind energy loss. To address this issue, the improved MPPT control is proposed in this paper. The contribution of this paper can be summarized as follows:
First, the conventional MPPT methods are briefly reviewed, and the potential issues in the PSF control, DTG control, and ATG control are investigated. It is found that the ATG control is blind to the atmospheric changes, which may lead to incorrect tracking direction and MPPT failures. It is also revealed that the mistaken tracking is impacted by wind speed fluctuations.
Second, the IATG control is proposed to improve the ATG control, and its performance is demonstrated via simulation. The IATG control considers the wind speed fluctuations and updates the optimal control gains adaptively. Specifically, it makes use of the off-line learning and on-line optimization and obtains the functional relationship between Kdopt and Ti. The Kdopt-Ti curves can be recorded in a WECS easily, and thus the IATG control can be implemented quickly and simply.
Furthermore, MPPT in essence is a tracking problem and its success largely depends on a reasonable selection of tracking references. This paper works out the relationship between wind speed characteristics and optimal gain coefficients (i.e., tracking references), which has not been reported in previous literature. The proposed IATG control with the favorable tracking references can improve MPPT performances and WECS efficiency.
Further works may include implementing the proposed IATG control in a real WECS and investigating the impact of the IATG on wind farms and renewable energy integration.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}