1. Introduction
Wind energy has been receiving increasing attention as one of the most exploitable renewable energy sources. The efficiency of wind energy conversion is mainly dependent on the aerodynamic shape of the wind turbine rotor [
1], an essential component of a wind turbine for harvesting wind energy. Therefore, the aerodynamic optimization of wind turbine rotors plays a crucial role in the design of wind turbines. Generally, the current aerodynamic design for wind turbines is divided into two major categories: the direct method [
2,
3,
4,
5,
6,
7,
8,
9,
10] and the inverse method [
11,
12,
13,
14,
15,
16,
17]. As compared with the former, the latter is distinguished by its clear principle, analytical process and fast convergence. In the inverse method, some basic design parameters (e.g., design tip speed ratio, blade number, blade radius, hub radius and airfoil distribution) and the desired aerodynamic characteristic (e.g., peak power, rated wind speed and lift coefficient distribution) are firstly specified. Then, the aerodynamic shape parameters (e.g., the blade chord and twist distributions) are directly obtained via analytical calculation.
Variable-speed wind turbines (VSWTs) have become the mainstream of large-scale wind power generation systems in recent years [
18,
19]. They mostly operate in the variable-speed region [
20], which corresponds to the wind speed range from the cut-in to the rated speed. In this region, the maximum power point tracking (MPPT) control is employed to regulate rotor speed according to wind speed variation so that the VSWT can be maintained at the design tip speed ratio (TSR) λ
dgn (also called the optimal TSR λ
opt) [
21]. Therefore, in the conventional inverse methods for the aerodynamic optimization of VSWTs, such as the Glauert method [
11], the Wilson method [
12] and others [
13,
14,
15,
16,
17] based on the blade element momentum (BEM) theory, the primary objective is to maximize the power coefficient at a specified
λdgn.
As one of the basic parameters in the inverse methods for the aerodynamic optimization of VSWTs, λ
dgn exerts a considerable influence upon the aerodynamic shape of rotors [
22,
23], including the radial chord and twist distributions. To obtain an appropriate λ
dgn, the functional relation between λ
dgn and the maximum power coefficient
Cp,max, which is regarded as a type of the turbines’ static aerodynamic performance, has been discussed in References [
24,
25,
26,
27]. According to this relation, the λ
dgn corresponding to the maximum value of
Cp,max is selected and then the chord and twist distributions are optimized based on this λ
dgn by an inverse method in Reference [
13].
Obviously, in the aforementioned inverse methods, λ
dgn is determined only based on the static aerodynamic performance, and the impact of λ
dgn on the dynamic process of MPPT is usually neglected. This may result in a considerable reduction in VSWTs’ efficiency, as interpreted below:
- (1)
The wind energy capture efficiency, as a closed-loop performance of VSWTs, is actually dependent on not only the static aerodynamic performance but also the MPPT dynamics. It has been pointed out in References [
10,
28,
29,
30,
31] that turbines with large inertia usually track λ
dgn rather than maintaining at λ
dgn. Moreover, the longer the dynamic process lasts, the lower the wind energy capture efficiency is. Especially for the VSWTs designed for low wind speed regions, larger inertia of the wind turbine rotor and weaker aerodynamic torque result in a slower dynamic behavior and a longer dynamic process of MPPT. Therefore, the dynamic process of MPPT and its effect on the wind energy production should be carefully modeled, especially for the low wind speed VSWTs.
- (2)
Besides
Cp,max, λ
dgn also has an effect on the dynamic process of MPPT. With the decrease (increase) of λ
dgn, the MPPT process is shortened (lengthened) and correspondingly the wind energy capture efficiency is increased (decreased) [
32].
- (3)
To sum up, λdgn exerts a comprehensive influence upon the wind energy capture efficiency through the static aerodynamic performance and the MPPT dynamics. If a larger λdgn is conventionally applied just for improving the static aerodynamic performance (i.e., Cp,max), the turbine has to spend more time operating at the off-design TSRs due to the prolonged dynamic process of MPPT and eventually the overall efficiency of the closed-loop VSWT system is reduced.
Therefore, in the inverse aerodynamic design of VSWT rotors, the static aerodynamic performance and the dynamic process of MPPT should be compromised for determining an appropriate λ
dgn. In this paper, based on the inverse design program PROPID [
33,
34] for the aerodynamic optimization of VSWTs, an inverse method fully considering the impact of λ
dgn on the static and dynamic behavior of turbines is proposed. Compared to the existing separated design procedure, λ
dgn, chord length and twist angle are jointly optimized to maximize the closed-loop performance of VSWTs (i.e., wind energy capture efficiency) in this method. Finally, the proposed method is verified by the simulation results based on the commercial software Bladed [
35,
36].
2. Problem Description
Actually, the wind energy capture efficiency, as a closed-loop performance of VSWTs, is collectively determined by the static aerodynamic performance as well as the MPPT dynamics. Although a larger design TSR can contribute to better static aerodynamic performance (i.e., higher Cp,max), it also greatly increases the duration of the dynamic process of MPPT so that the overall efficiency of the closed-loop VSWT system can be reduced. However, this comprehensive impact of λdgn on wind energy capture efficiency through static aerodynamic performance and MPPT dynamics is usually ignored by the conventional aerodynamic design of VSWTs in the literature.
2.1. Relationship between λdgn and Cp,max
For single-airfoil wind turbine rotors, the relationship between λ
dgn and
Cp,max characterized by a parabolic function has been derived in References [
24,
25,
26]. Furthermore, for multi-airfoil wind turbine rotors, which are generally implemented in practical VSWTs, the 1.5 MW wind partnership for advanced component technologies (WindPACT) turbine [
37] developed by the national renewable energy laboratory (NREL), is chosen for analyzing the relation of
Cp,max with λ
dgn. Specifically, keeping the original blade radius, hub radius and airfoils unchanged, the PROPID code [
33,
34] is applied to design the aerodynamic shape of the WindPACT turbine according to the different λ
dgn, which ranges from 5.0 to 10.0 with a step size of 0.5. Then,
Cp,max of the redesigned wind turbine rotors corresponding to an array of λ
dgn are respectively calculated by the software Bladed.
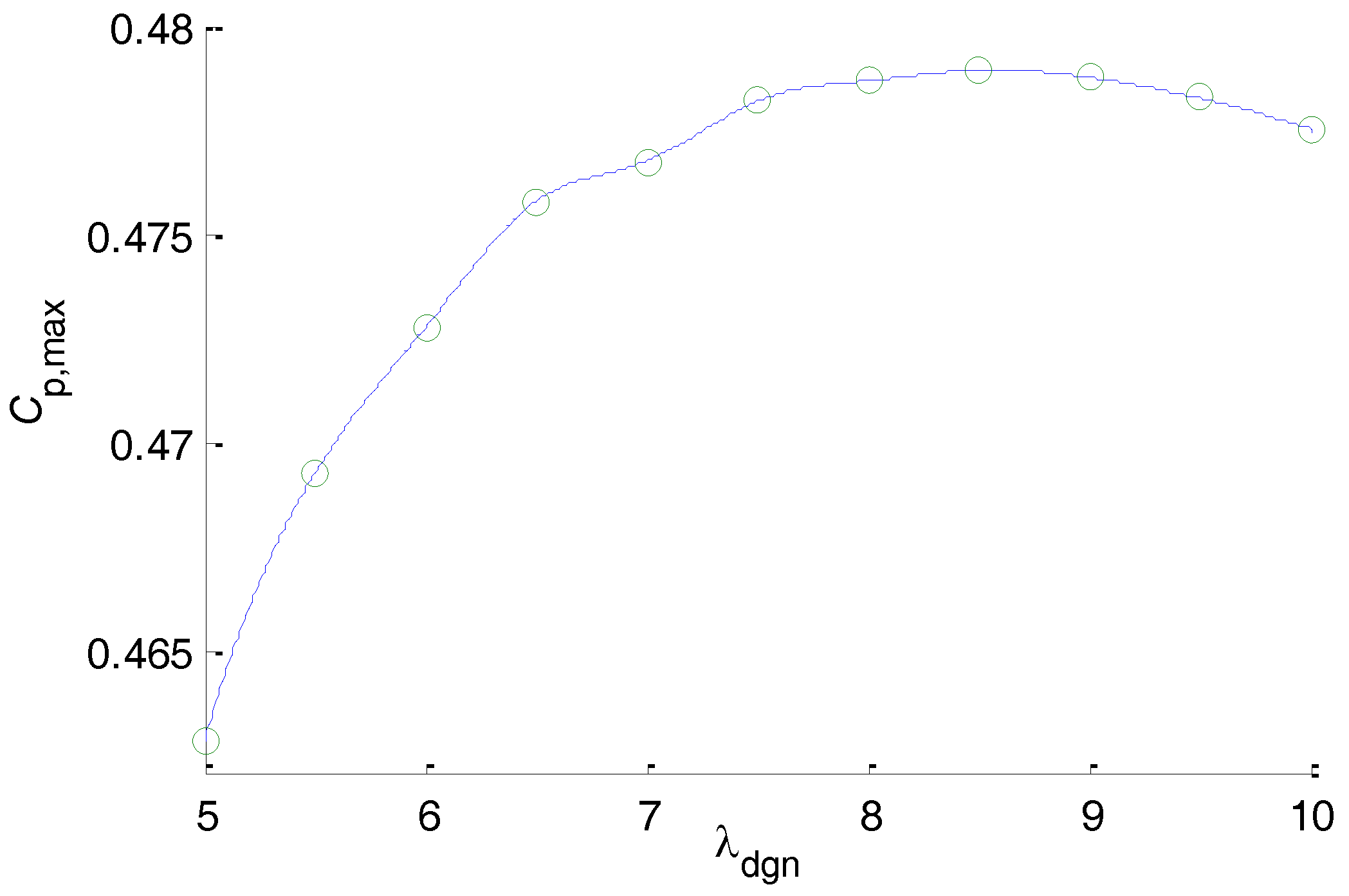
As shown in
Figure 1, the variation of
Cp,max versus λ
dgn also exhibits a parabolic shape and the maximum value of
Cp,max occurs at λ
dgn = 8.5. Therefore, λ
dgn corresponding to the maximum value of
Cp,max is selected in the existing inverse methods [
11,
12,
13,
14,
15].
2.2. The Impact of λdgn on the Maximum Power Point Tracking (MPPT) Process
Besides the aforementioned
Cp,max, it has been shown from the viewpoint of a closed-loop model of VSWTs that λ
dgn has a significant impact on the dynamic process of MPPT [
32].
2.2.1. A Closed-Loop Model of Variable-Speed Wind Turbines (VSWTs)
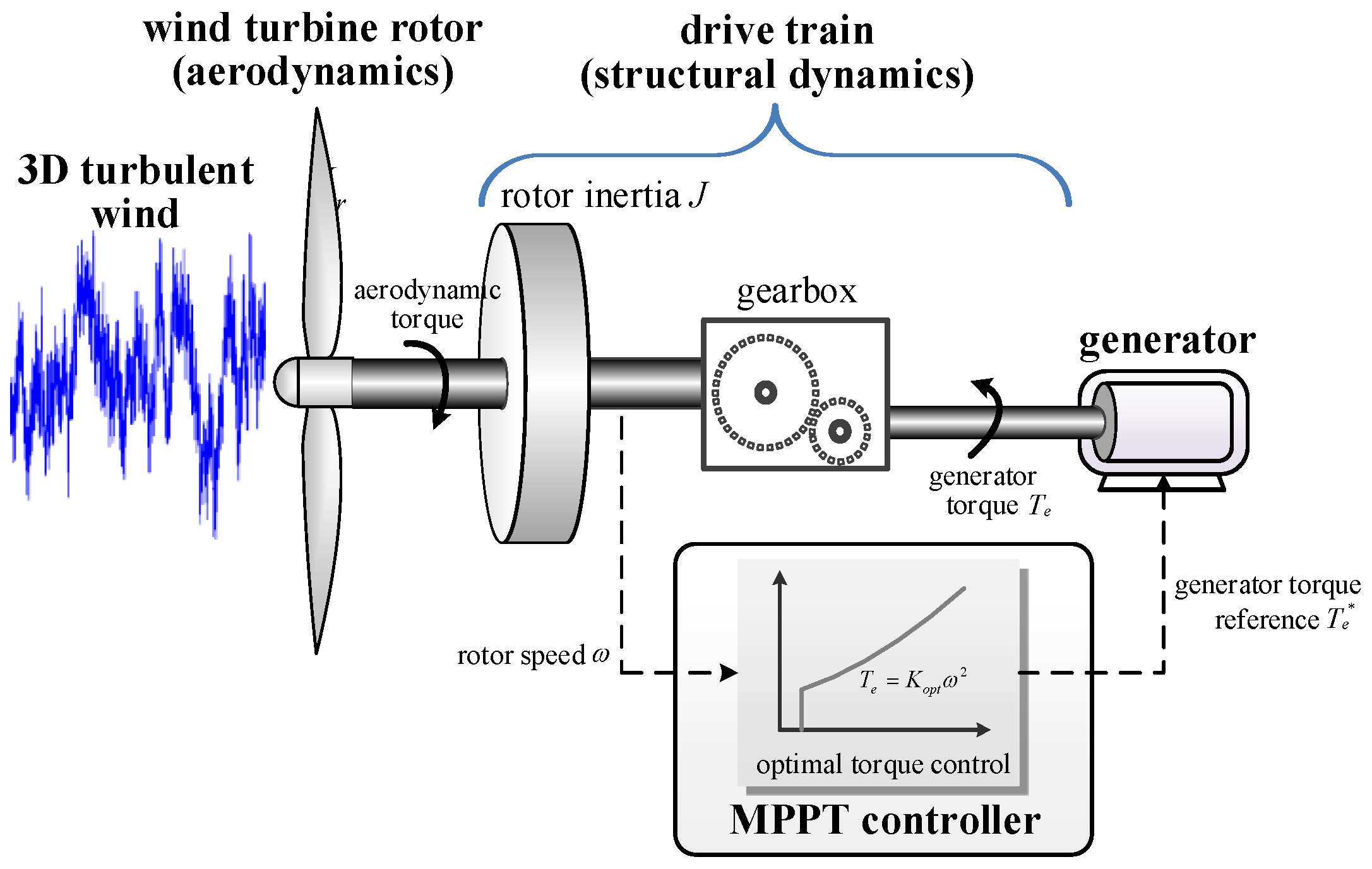
As shown in
Figure 2, a closed-loop model of VSWTs consists of turbulent wind, a wind turbine rotor, a drive train, a generator and a MPPT controller. Note that because the electromagnetic response is much faster than the mechanical one, the converter can be neglected and the generator is assumed to instantly follow the torque reference requested by the MPPT controller [
30].
In this paper, the commercial software Bladed [
35,
36] is employed to conduct the time-domain dynamic simulation of the closed-loop model. This software has passed the Germanischer Lloyd’s certification and has been widely applied for wind turbine design, analysis and validation.
The aerodynamic model used within Bladed is based on the BEM theory. To sufficiently reproduce the dynamics of rotor wake and induced velocity flow field (i.e., the vorticity trailed into the rotor wake is influenced by the change in blade loading and the time for the change of the induced flow field is finite), the dynamic inflow model [
35] is selected.
The commonly-used control strategy for MPPT, known as the optimal torque (OT) control [
38], is employed. To track maximum power point, the OT control regulates the generator torque according to the measured rotor speed and a predefined torque versus rotor speed curve that is expressed as:
where
is the rotor speed,
is the air density,
R is the blade length and λ
opt is equal to λ
dgn.
2.2.2. The Impact of λdgn on the MPPT Process
The optimal rotor speed
for MPPT is defined as:
where
is the wind speed. The tracking range of rotor speed, defined as the difference of
corresponding to wind speed variation, is proportionally related to λ
dgn. Obviously, λ
dgn exerts a direct influence upon the dynamic process of MPPT.
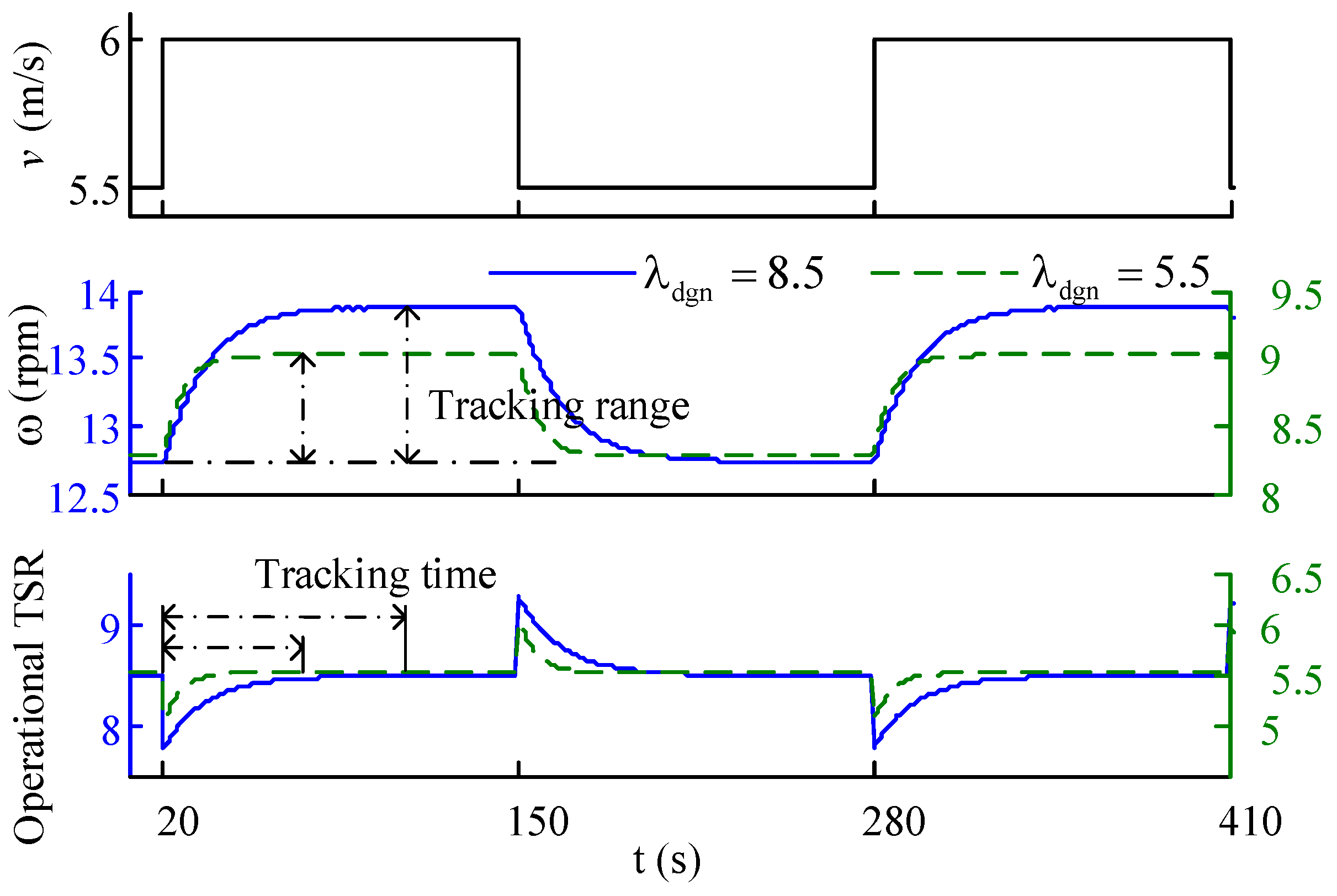
To illustrate the impact of λ
dgn on the MPPT process, simulations on the redesigned WindPACT turbines with two different λ
dgn (i.e., 5.5 and 8.5) excited by a step variation of wind speed are conducted by the Bladed software. The simulation results are compared in
Figure 3 and
Table 1, respectively. It can be seen that as λ
dgn increases, the tracking range of rotor speed is widened, which results in a longer dynamic process of MPPT. Correspondingly, the rotor spends more time operating at the off-design TSRs.
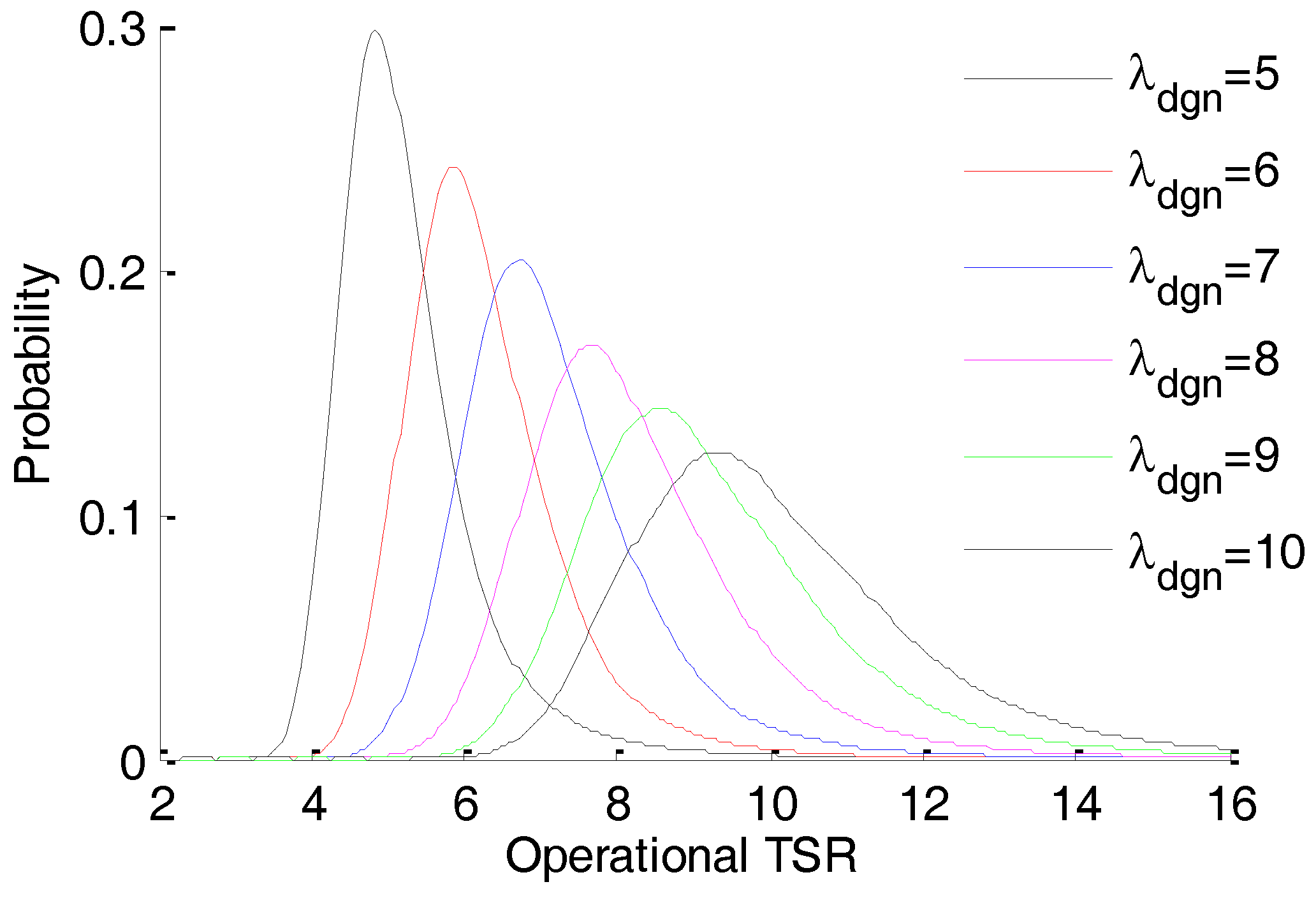
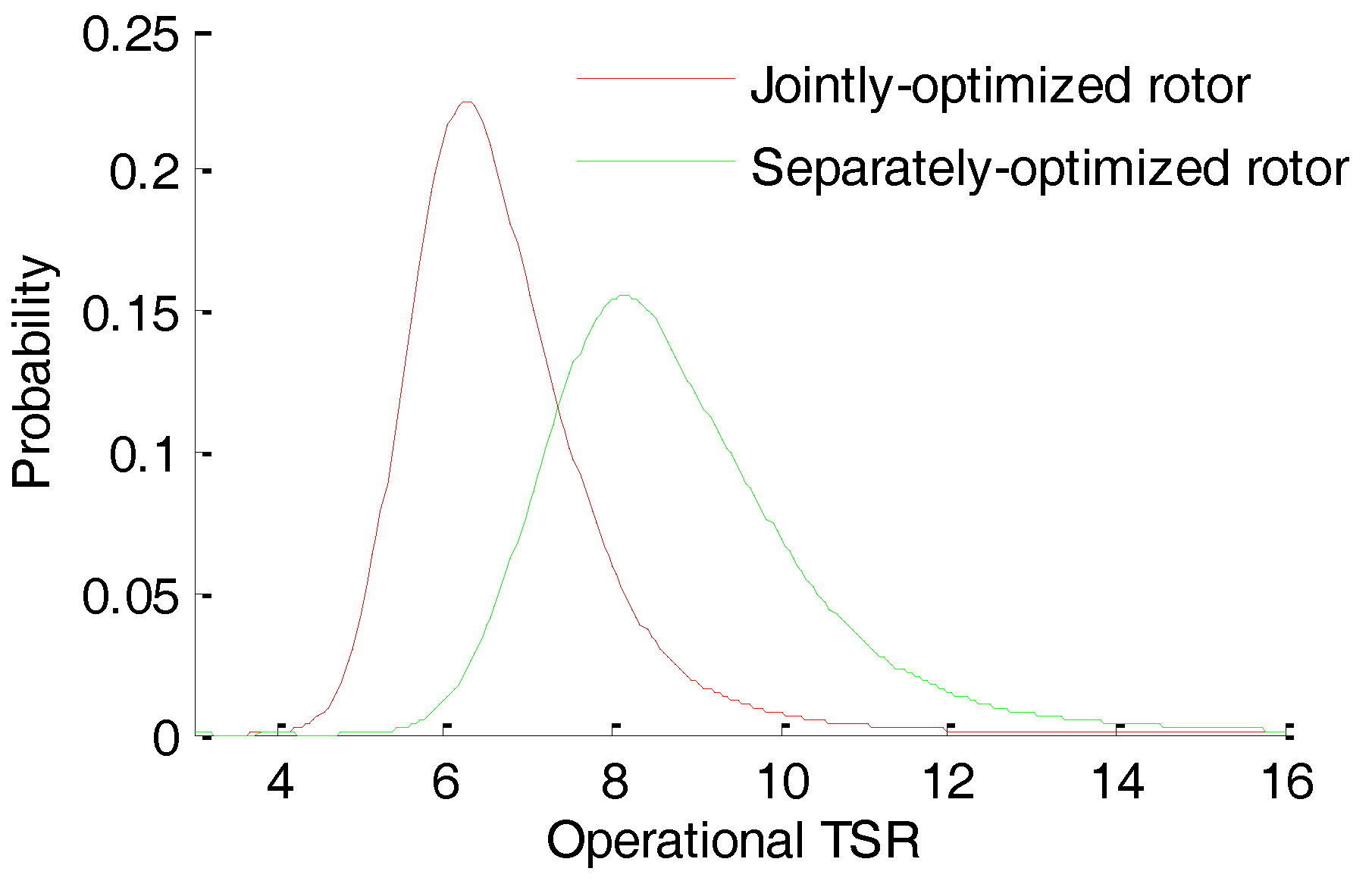
Furthermore, for a given turbulent wind (mean wind speed is 6.5 m/s and the turbulence class is
A [
39]), the probability distributions of operational TSR corresponding to an array of λ
dgn (from 5.0 to 10.0) are obtained by the dynamic simulations and plotted in
Figure 4. It also can be observed that the larger the λ
dgn, the smaller the probability of operational TSR around λ
dgn, namely, the more time the turbine will take to operate at the off-design TSRs.
2.3. The Comprehensive Impact of λdgn on Wind Energy Capture Efficiency via Cp,max and the MPPT Process
Because off-design TSRs correspond to the power coefficients less than
Cp,max, running at such TSRs results in tracking losses [
28,
29,
30,
31]. It is inferred that if a turbine operates at off-design TSRs for a long duration due to the increasing of λ
dgn, its MPPT efficiency is inevitably reduced. Therefore, by combining the discussion mentioned in
Section 2.1 and
Section 2.2, λ
dgn actually exerts a comprehensive impact on the wind energy production of VSWTs through static aerodynamic performance and MPPT dynamics. That is to say, although a relatively large λ
dgn yielding the maximum value of
Cp,max can contribute to improving the wind energy capture efficiency, the overall efficiency is probably reduced due to the long-duration dynamic process of MPPT.
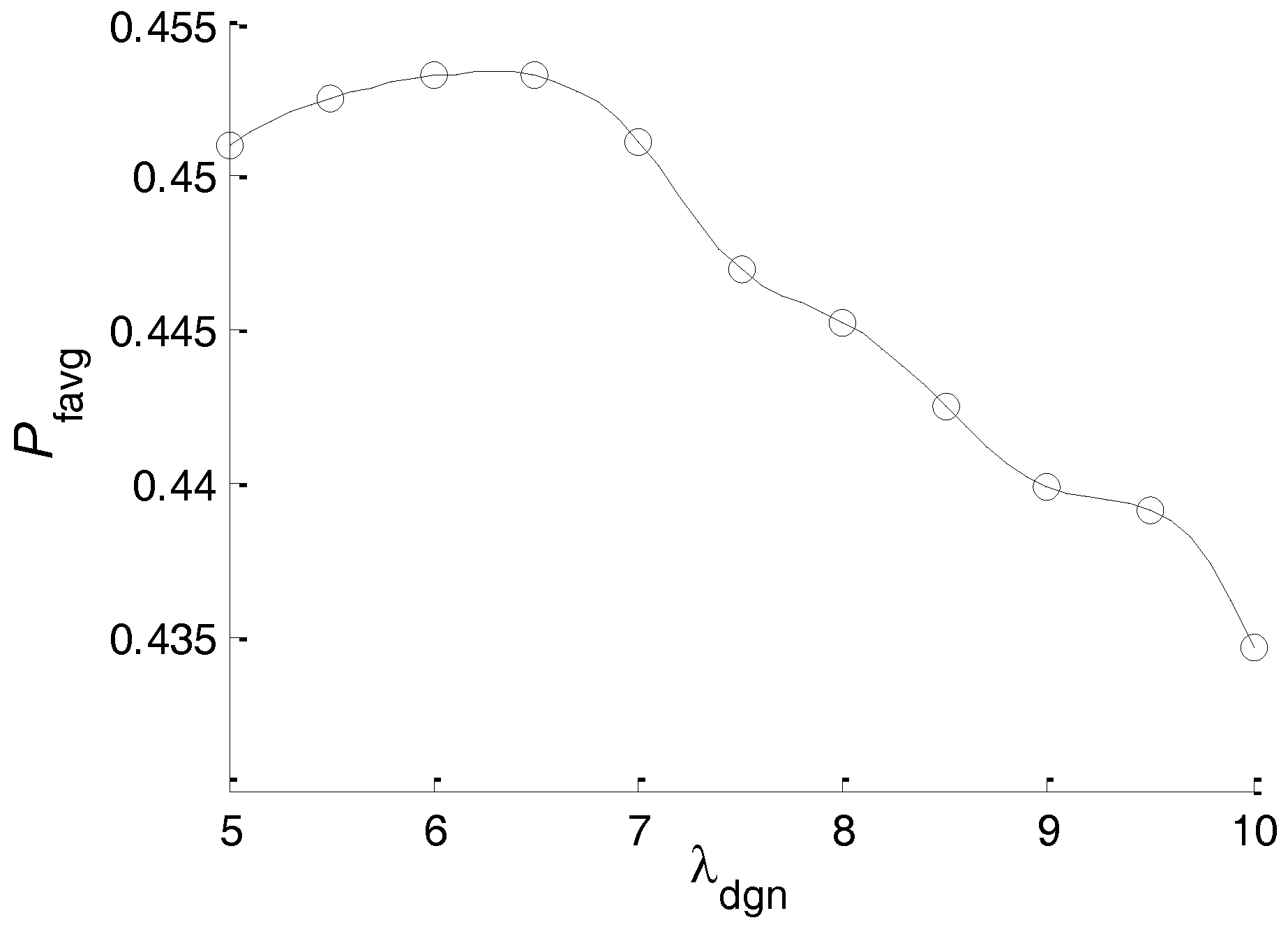
To demonstrate such a comprehensive impact of λ
dgn on wind energy capture efficiency, the relationship between the efficiency and λ
dgn is obtained via the Bladed-based simulation on the WindPACT turbine. Note that the wind energy capture efficiency
Pfavg [
20] is in fact a closed-loop performance indicator of VSWTs operating under turbulent wind. Its expression and calculation are provided in
Section 3.1. As depicted in
Figure 5,
Pfavg first increases and then decreases with λ
dgn. This indicates that with the increase of λ
dgn, the prolonged MPPT process rather than the raised
Cp,max gradually plays a dominant role in the MPPT performance.
Hence, there is a tradeoff, which can be optimized by λdgn, between the static aerodynamic performance (i.e., increasing Cp,max) and the dynamic process of MPPT (i.e., reducing the tracking range of rotor speed). They should be simultaneously considered in determining λdgn so that the wind energy capture efficiency can be eventually improved.
3. Aerodynamic Optimization Considering the Comprehensive Impact of λdgn
Based on the inverse design method, this paper proposes a new method for the aerodynamic optimization of VSWTs. Different from the separated procedure applied in the conventional methods, the design TSR and the distributions of chord and twist are jointly optimized for maximizing the wind energy capture efficiency in the proposed method so that the effect of λdgn on both Cp,max and the MPPT process can be integrally considered. Essentially, the new method aims to improve the closed-loop performance of VSWTs through the coordination between the static aerodynamic performance and the MPPT dynamics.
3.1. Wind Energy Capture Efficiency
The wind energy capture efficiency is approximated as the ratio of the captured power to the available wind power
Pfavg [
20], i.e.,
where
N is the total of the simulation steps,
J is the rotor inertia,
,
,
,
,
and
are the wind speed, captured wind power, inflow wind power, rotor speed, generator torque and generator speed at the
i-th step, respectively.
Before calculating
Pfavg according to the Equation (3), the dynamic simulation on the closed-loop model of VSWTs is conducted for a given turbulent wind. The detailed procedure for calculating
Pfavg is described as follows:
Step 1 Model the concerning wind turbine in the Bladed software, including wind turbine rotor, drive train, tower, and etc.
Step 2 Call the aerodynamic analysis module provided by the Bladed software to calculate the rotor’s optimal TSR λopt and the corresponding maximum power coefficient Cp,max.
Step 3 Configure the parameters of the MPPT controller by the Equation (1).
Step 4 Perform the dynamic simulation module in the Bladed software with the given turbulent wind and obtain the simulated trajectories of the wind turbine.
Step 5 Calculate Pfavg according to the Equation (3) based on the simulated trajectories.
3.2. Joint Aerodynamic Optimization Based on the Inverse Design
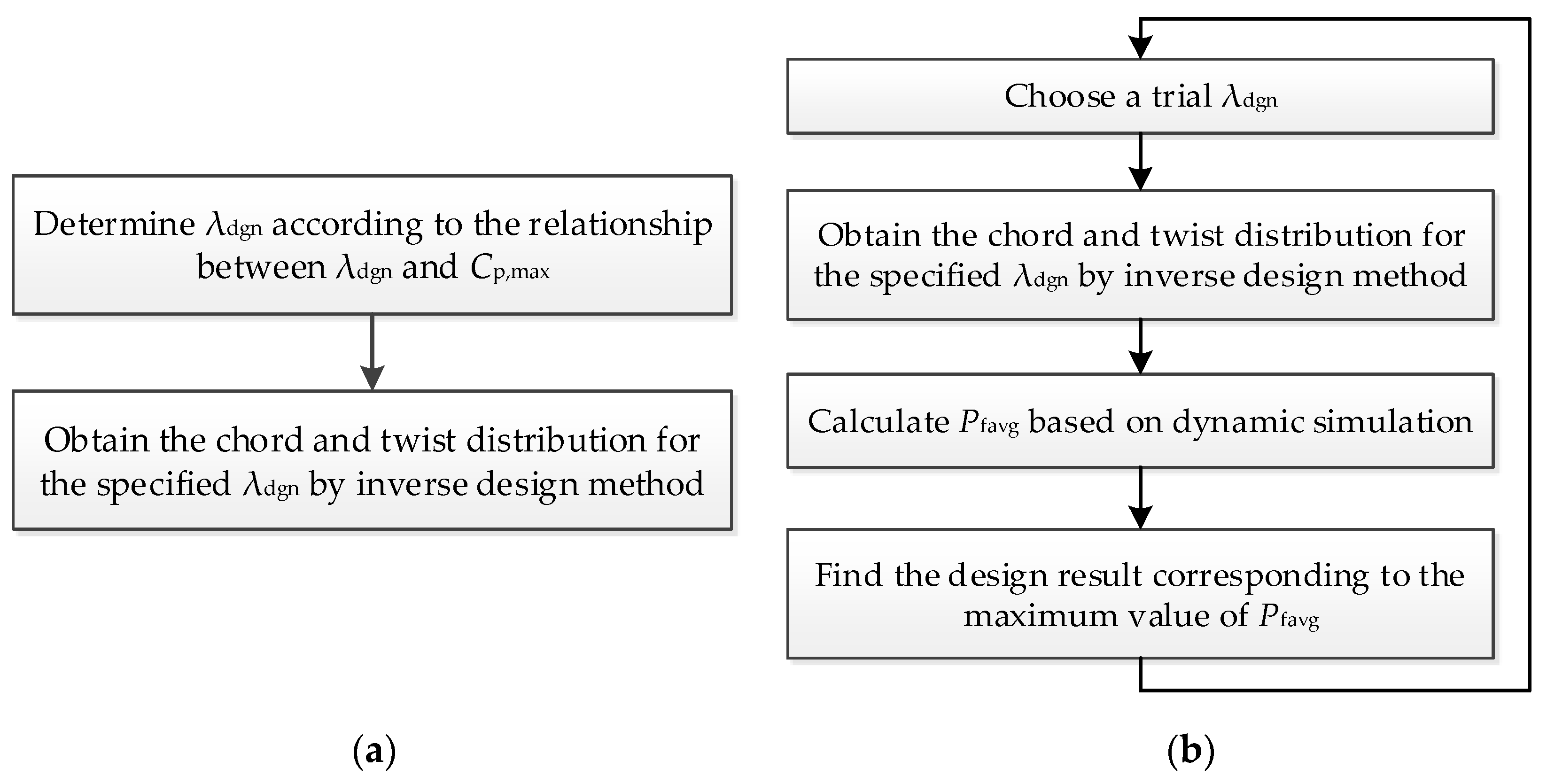
The schematic diagrams of the conventional inverse design and the joint aerodynamic optimization proposed in this paper are illustrated in
Figure 6. In the former method, as shown in
Figure 6a, λ
dgn is first determined according to the relationship between λ
dgn and
Cp,max, then the aerodynamic shape is derived through analytical calculation for the specified λ
dgn and other basic parameters (e.g., hub radius, rotor radius and airfoil distribution). Obviously, λ
dgn and the aerodynamic shape are separately obtained and the comprehensive effect of λ
dgn on the wind energy capture efficiency cannot be considered. To overcome this disadvantage, this paper proposes a new aerodynamic optimization method based on the inverse design. In this method, as represented in
Figure 6b, by introducing
Pfavg as a performance indicator, λ
dgn and the aerodynamic shape are jointly optimized so that the static aerodynamic performance and the MPPT dynamics, which are dependent on λ
dgn, are coordinated.
Specifically, in the proposed method, the PROPID code [
32,
33] is employed for inverse aerodynamic design;
Pfavg is calculated based on the Bladed-based dynamic simulation; the interval quartering algorithm [
40] is adopted to search the aerodynamic design with maximum
Pfavg from a number of trial λ
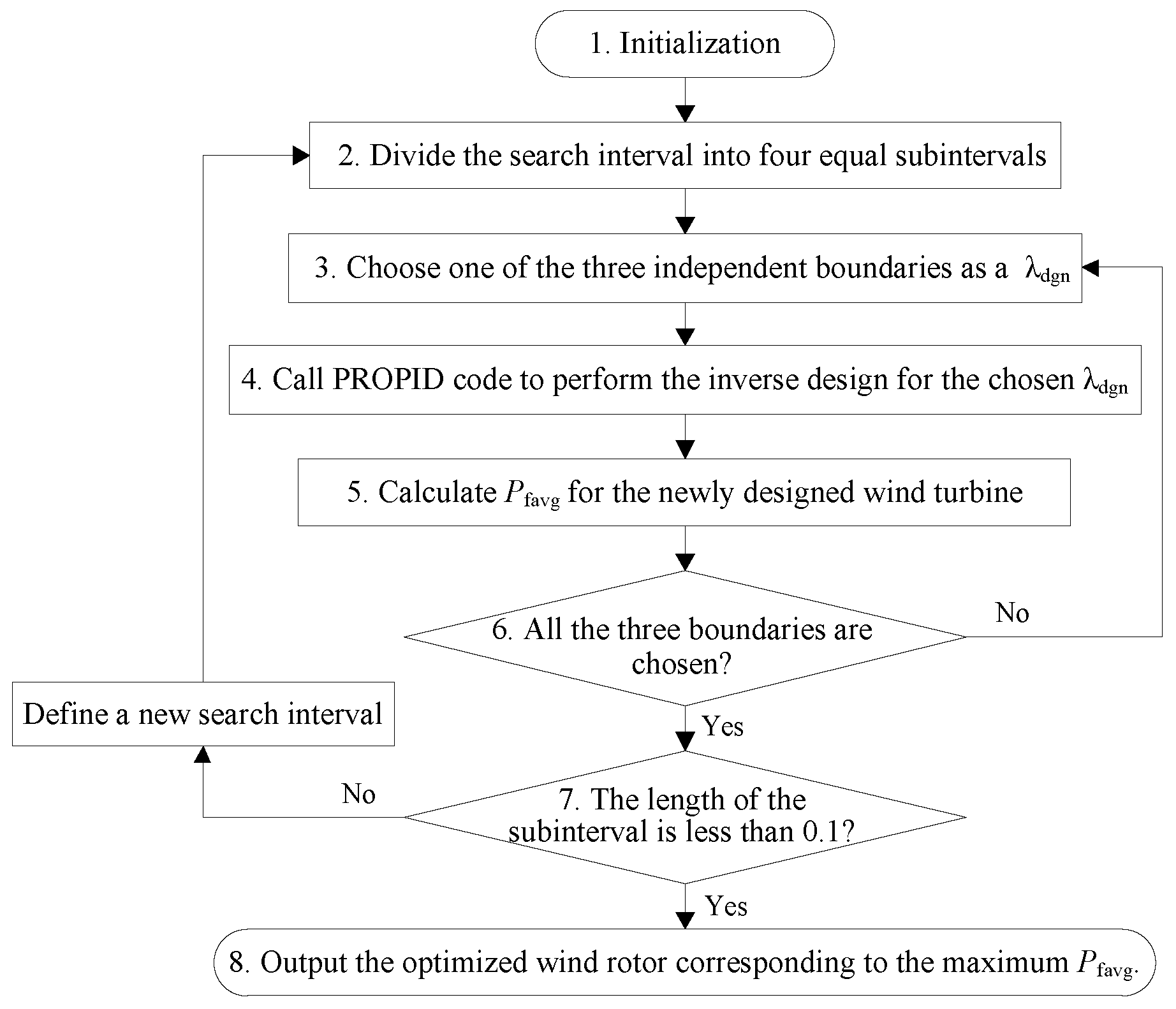
dgn. The flowchart of the joint aerodynamic optimization for VSWTs is shown in
Figure 7 and the detailed procedure is described as follows:
Step 1 Initialization.
Step 1.1 Initialize the aerodynamic parameters according to the baseline wind turbine, including blade number B, blade length R, rotor hub radius Rhub, airfoils and original distributions of chord and twist. B, R, Rhub and airfoils (including the relative thickness) remain unchanged during the optimization procedure.
Step 1.2 Initialize the PROPID code with B, R, Rhub, airfoils and original distributions of chord and twist determined in Step 1.1.
Step 1.3 Considering the constraints of material cost and noise, λ
dgn usually ranges from 5.0 to 9.0 [
22,
23]. Thus, set the search interval of λ
dgn as [5.0, 9.0] in this paper.
Step 2 Divide the search interval equally into four connected subintervals and generate three independent boundaries of all the subintervals.
Step 3 Choose one of the boundaries as a trial λdgn.
Step 4 Call the PROPID code to perform the inverse design for the chosen λ
dgn and obtain the aerodynamic shape parameters.
Step 5 Calculate
Pfavg for the newly designed turbine according to the procedure presented in
Section 3.1.
Step 6 Check whether all the three boundaries are chosen. If yes, go to Step 7; otherwise, return to Step 3.
Step 7 Check whether the length of the subinterval is less than a termination threshold (which is determined as 0.1 in this paper by comprehensively considering the optimization result and the manufacturing precision of wind turbine blades). If yes, go to Step 8; otherwise, define the two adjacent subintervals sharing the boundary corresponding to the maximum Pfavg as the new search interval, and then go to Step 2.
Step 8 Output the jointly optimized wind turbine rotor corresponding to the maximum Pfavg.
Note that performing the inverse design by PROPID code, as a step of the whole optimization procedure, just aims to obtain the blade shape corresponding to a candidate λdgn. Then, Pfavg for each candidate rotor obtained by the Bladed-based dynamic simulation can reflect the flow dynamics predicted by the aeroelastic code. Moreover, the maximum Pfavg corresponds to an appropriate coordination between the static aerodynamic performance and MPPT dynamics.
5. Conclusions
This paper firstly reveals that λdgn exerts a comprehensive influence upon the overall efficiency of the closed-loop VSWT system through static aerodynamic performance and the dynamic process of MPPT. With the increase of λdgn, though Cp,max is improved, the tracking range of rotor speed as well as the dynamic process of MPPT become longer, which might eventually reduce the wind energy capture efficiency. Therefore, in the inverse aerodynamic design for VSWTs, the impact of λdgn on the static performance and the MPPT dynamic process should be compromised for determining an appropriate λdgn.
Based on the inverse design program PROPID for the aerodynamic optimization of VSWTs, this paper then proposes a new method, fully considering the impact of λdgn on the static and dynamic behavior of wind turbines. Different from the conventional separated design procedure, the design TSR, chord length and twist angle are jointly optimized to maximize the closed-loop performance of VSWTs, namely wind energy capture efficiency, in this method. Through the coordination between the static aerodynamic performance and the MPPT dynamics performed by the proposed method, higher wind energy capture efficiency of VSWTs under turbulence can be achieved, which is validated by the simulation results based on the Bladed software.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









