
Structural Dynamic Analysis of Semi-Submersible Floating Vertical Axis Wind Turbines



Abstract
:1. Introduction
2. Methodology
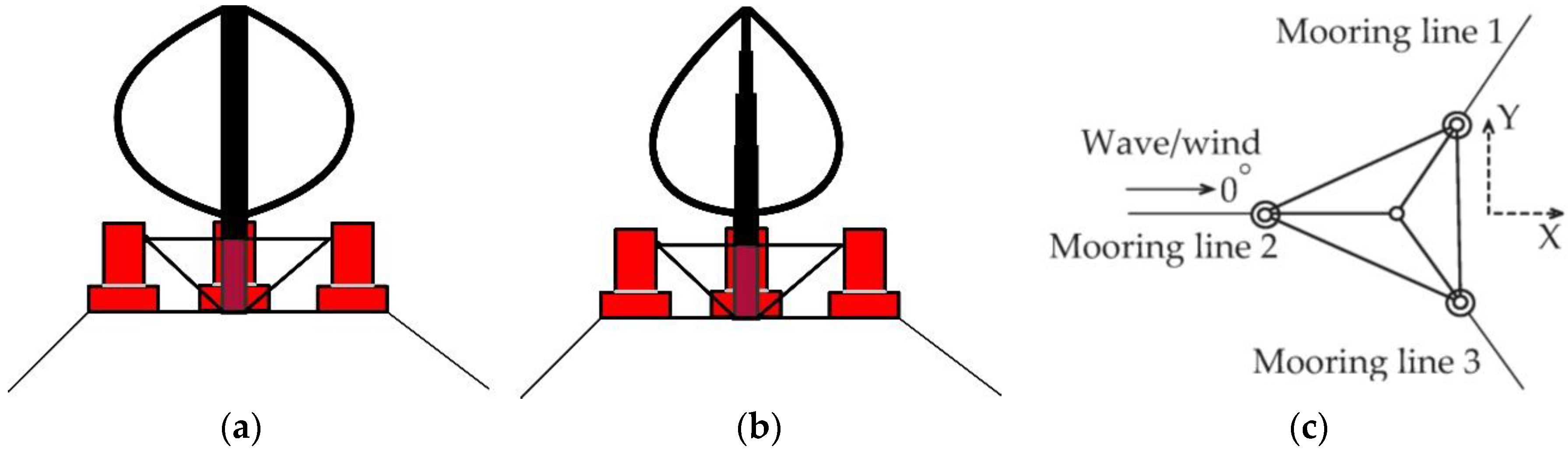
2.1. The Floating Vertical Axis Wind Turbine Models
2.2. A Method for the Platform Adaptation
- The ballast water is sea water with density ρ = 1.025 t/m3.
- From the platform detailed specifications [19], 25% and 75% of ballast mass were placed in the Upper Column (UC) and Base Column (BC) of offset columns respectively. No ballast in Centre Column CM.
- At the platform undisplaced position, the ballast mass geometry can be assumed as solid cylinder with mass.
- The FVAWT is assumed to be symmetrically loaded and thus, the method of buoyancy compensating force [39] is applied in SIMO.
- The distance from the centre of mass of ballast water to the CM equals the distance from the centre of mass of UC or BC to CM.
- Calculate the original FVAWT submerged mass. To maintain the same draft, the submerged mass of both the original FVAWT and the modified FVAWT must be equal.
- Subtract the respective total mass of flexible elements and the total platform metal mass from the submerged masses to obtain the masses of ballast water for the respective FVAWTs.
- Calculate the mass moment of inertia due to the mass of ballast water about the three axis of rotation taking the third assumption into consideration for both the original and modified platform.
- Subtract the inertias for the original platform obtained in step 3 from the original total platform inertias and then add the inertias due to mass of ballast of the modified platform obtained in step 3.
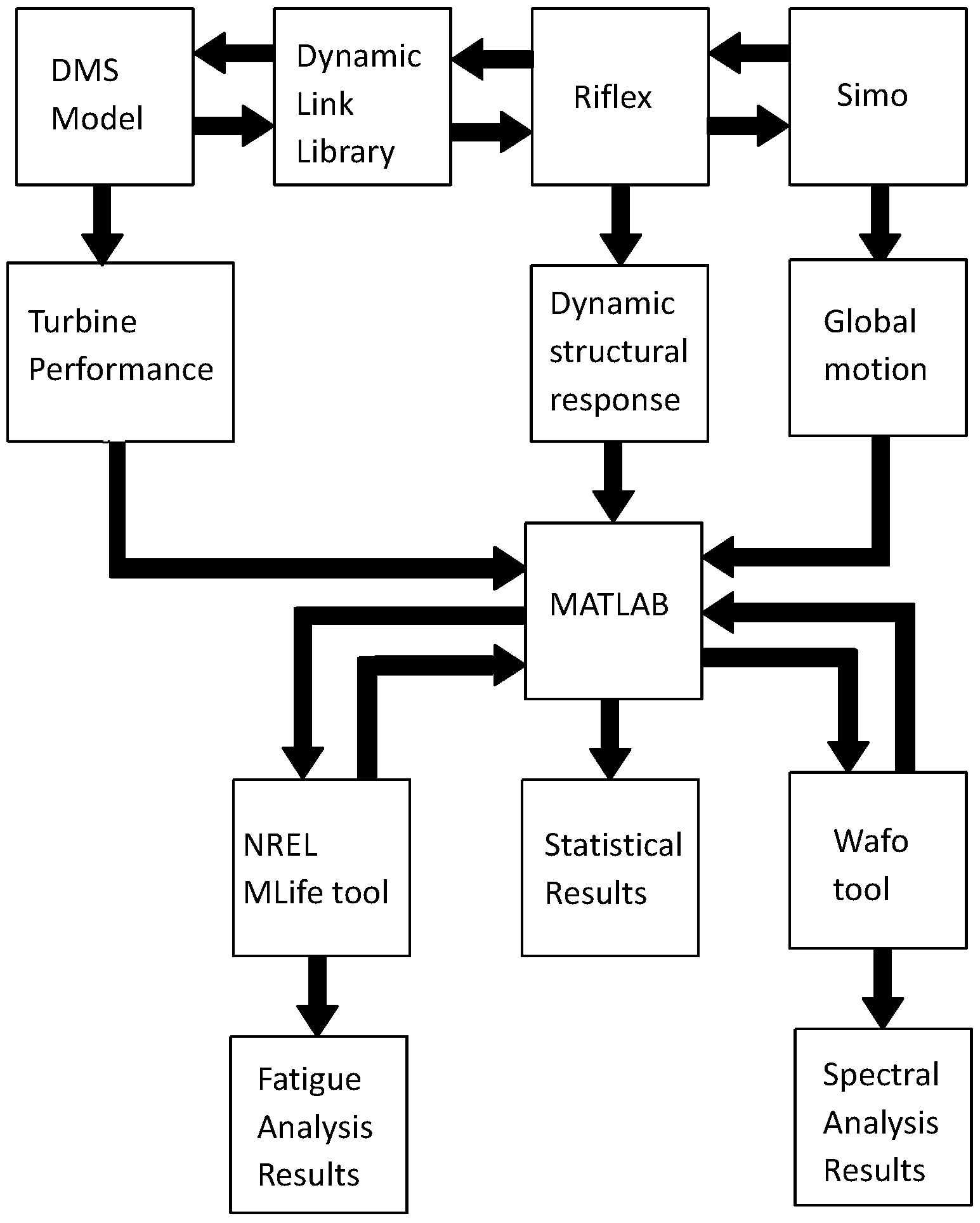
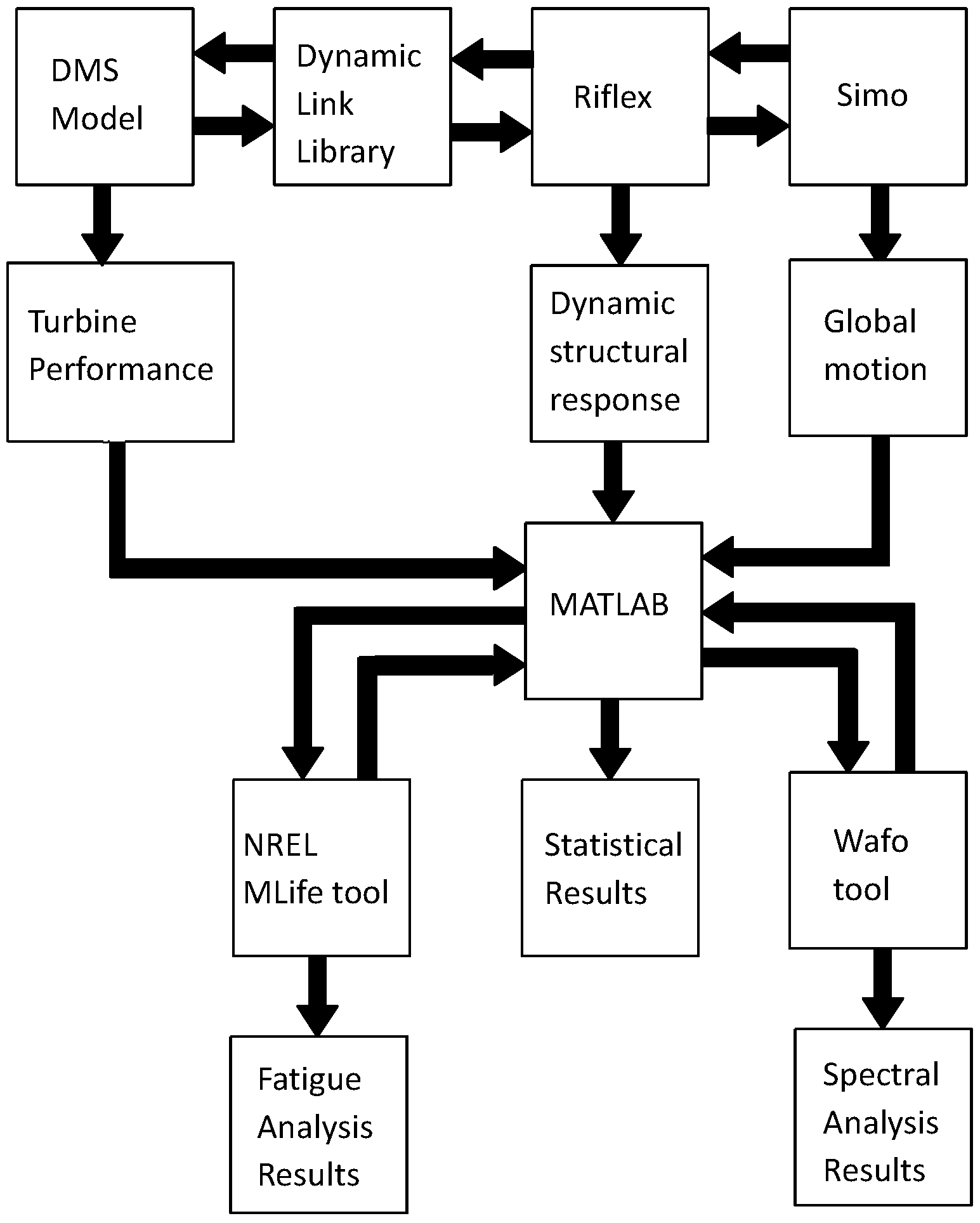
2.3. Coupled Modelling Tool for the FVAWTs
2.4. Design Load Cases
3. Results
3.1. Dynamic Response Analysis of the 5 MW Baseline FVAWT
3.1.1. Validation of Response Results
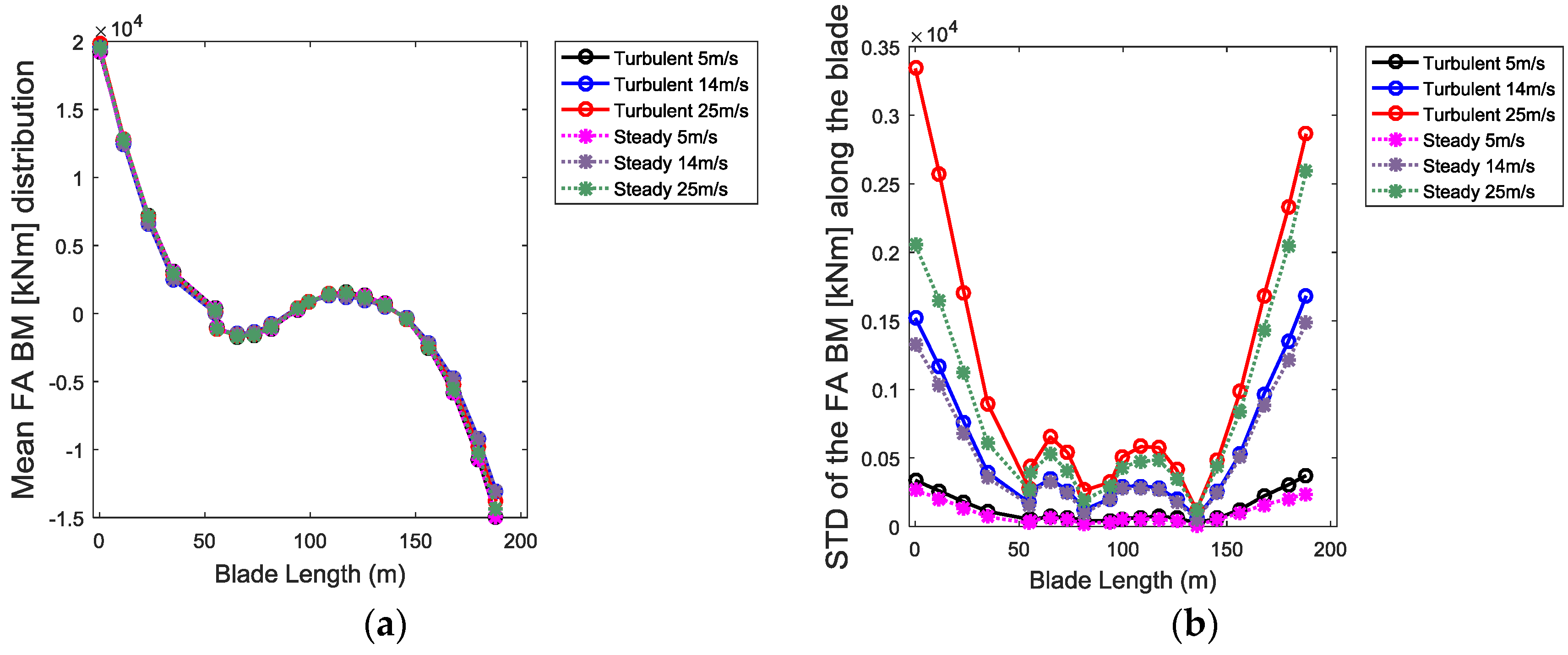
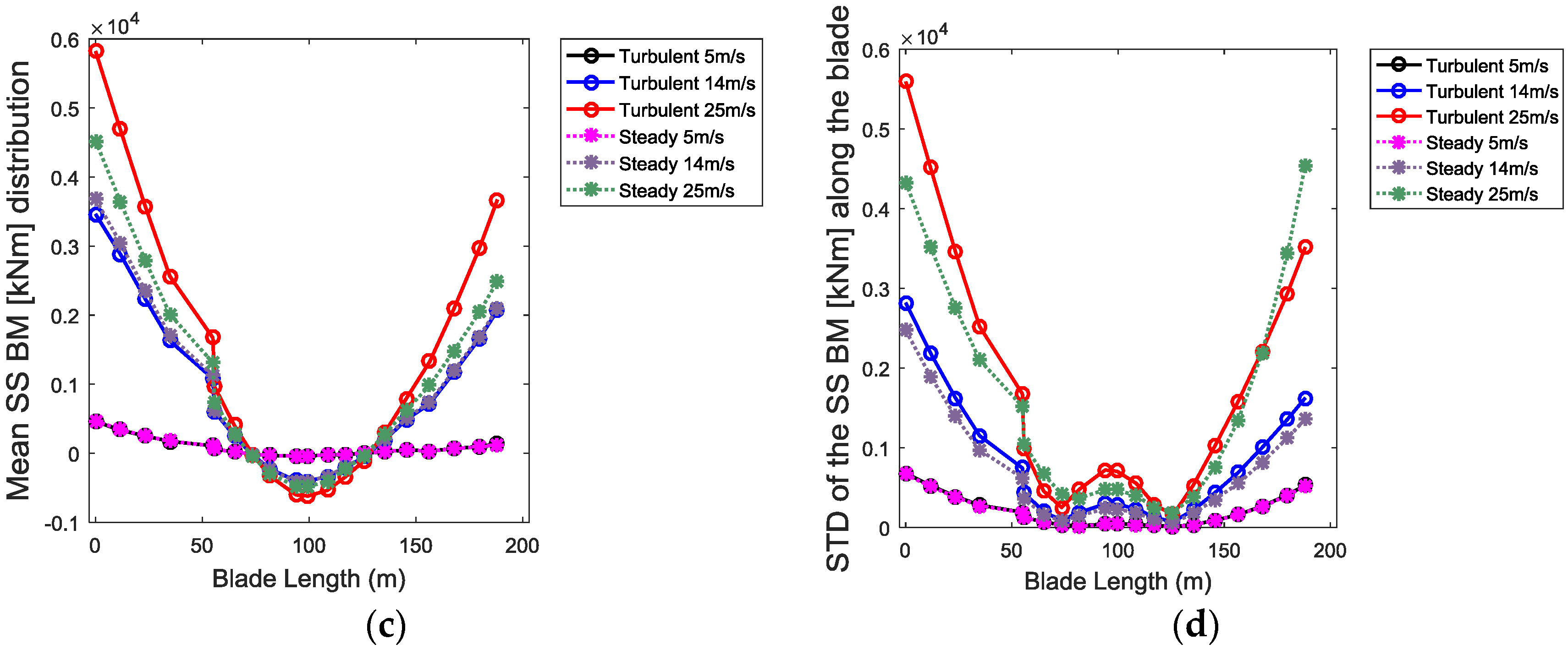
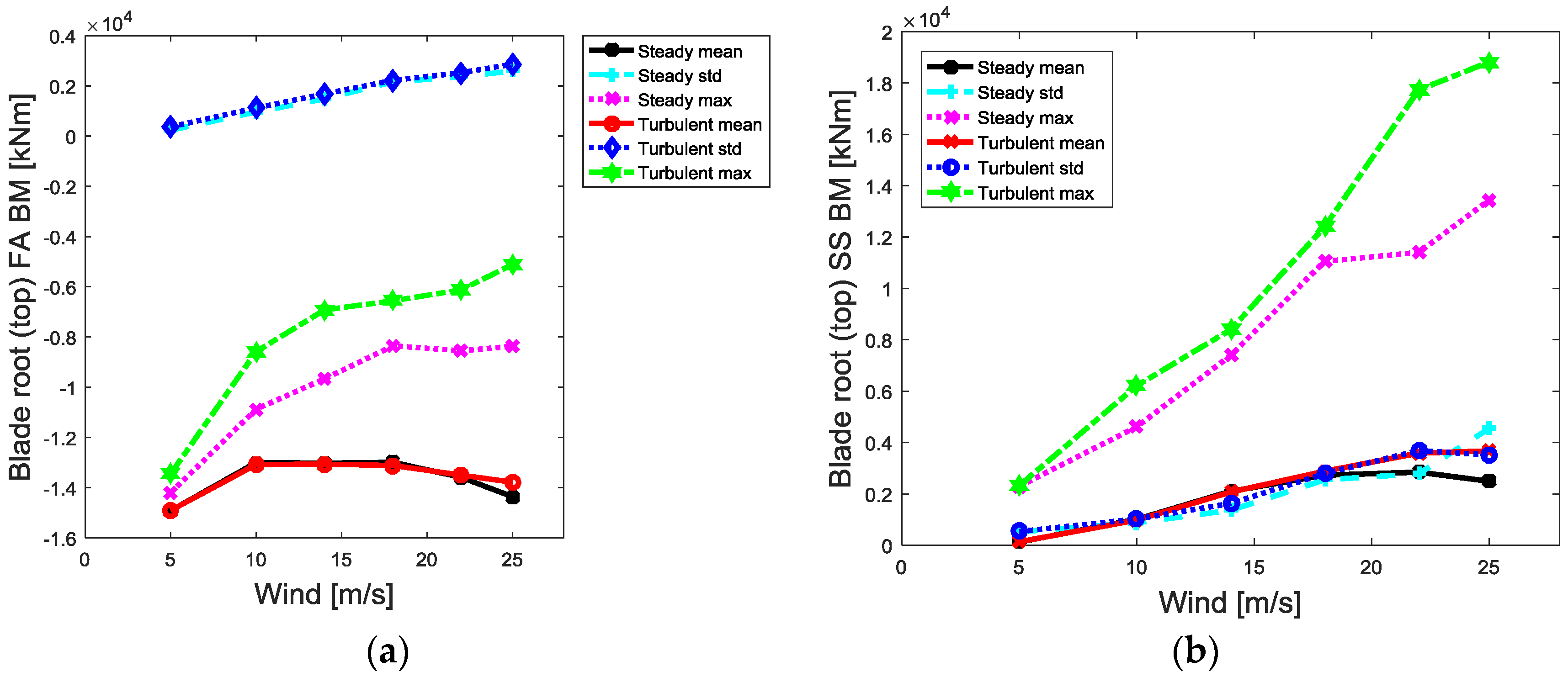
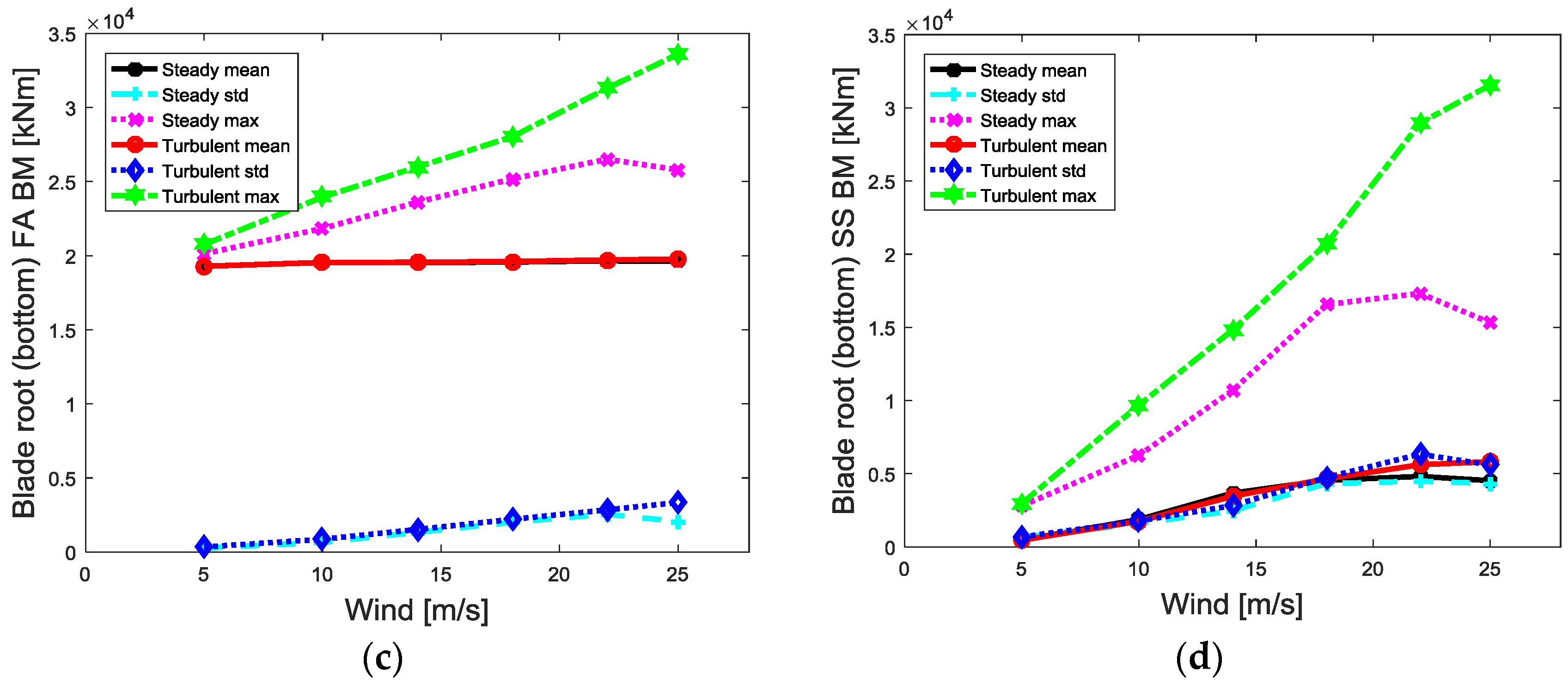
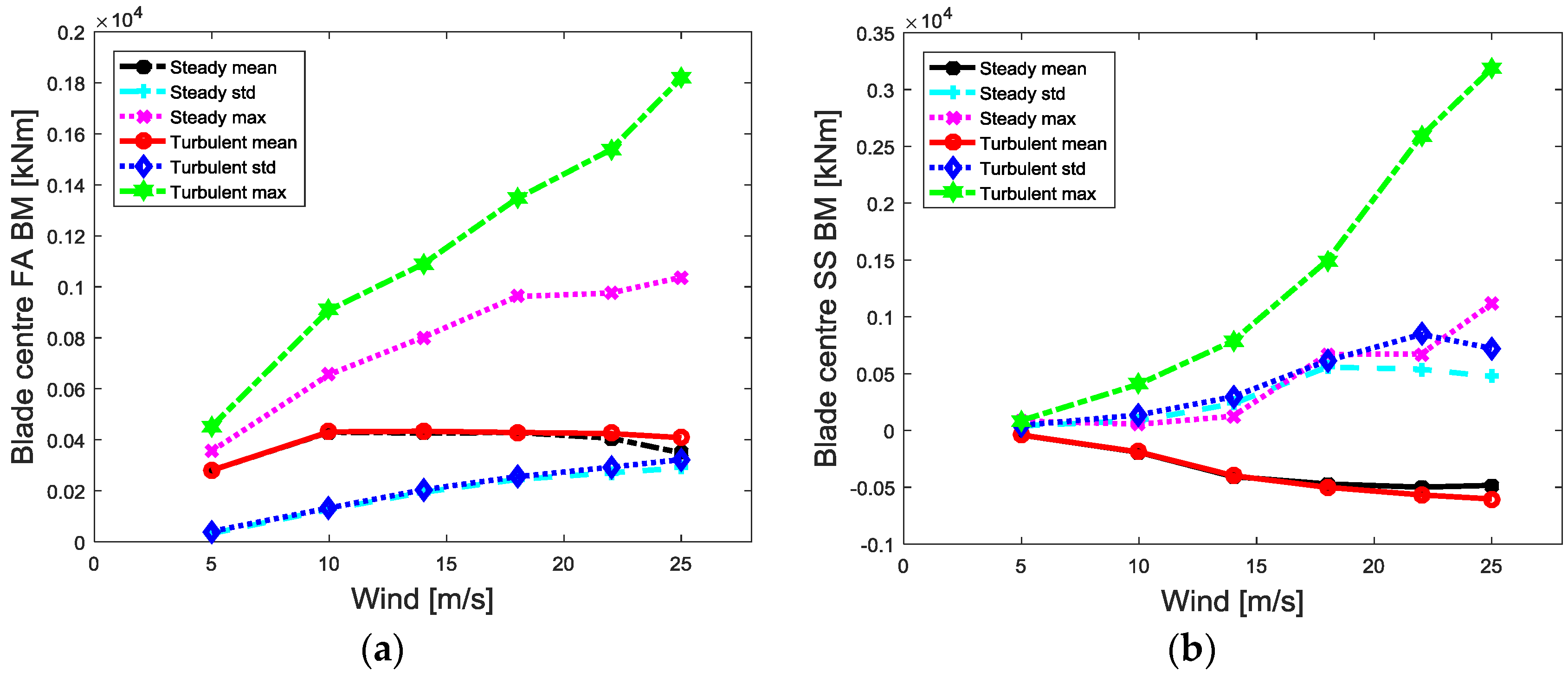
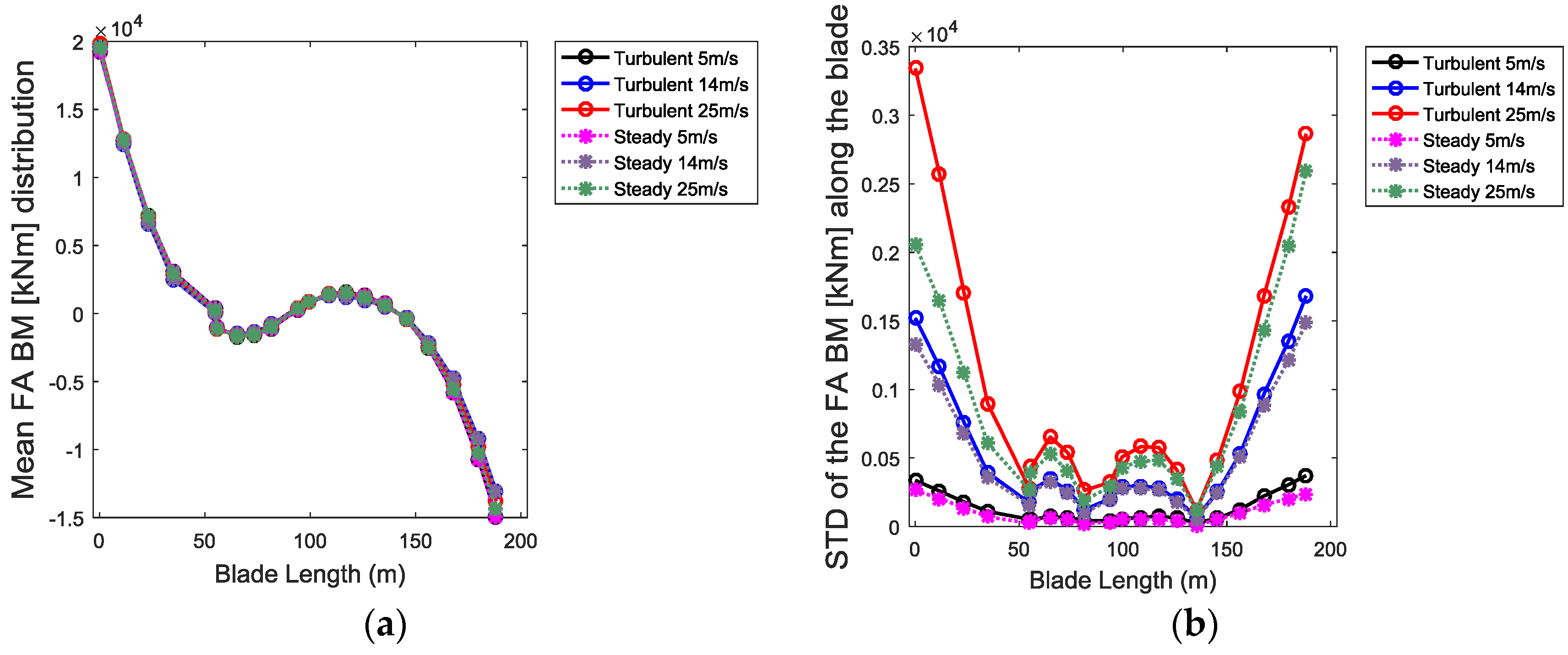
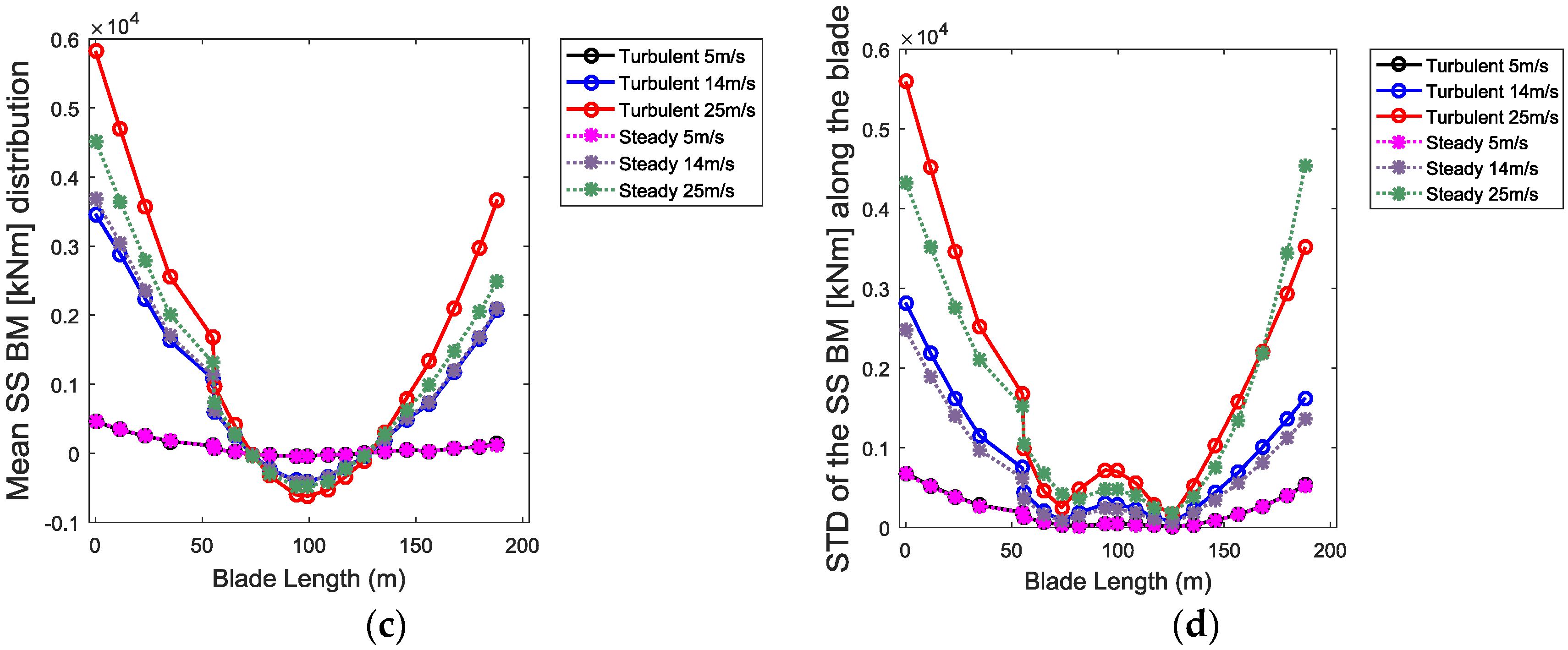
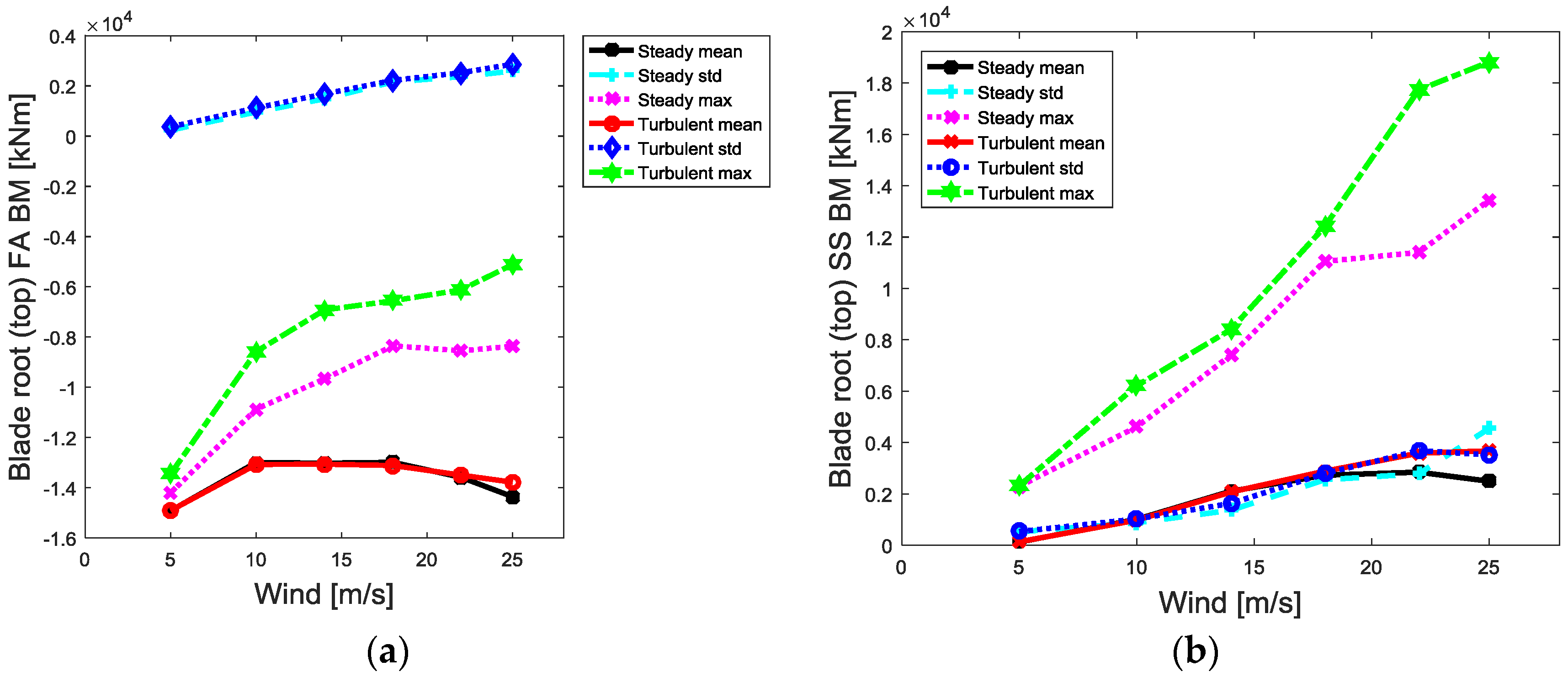
3.1.2. Effect of Turbulence on the Blade Bending Moments
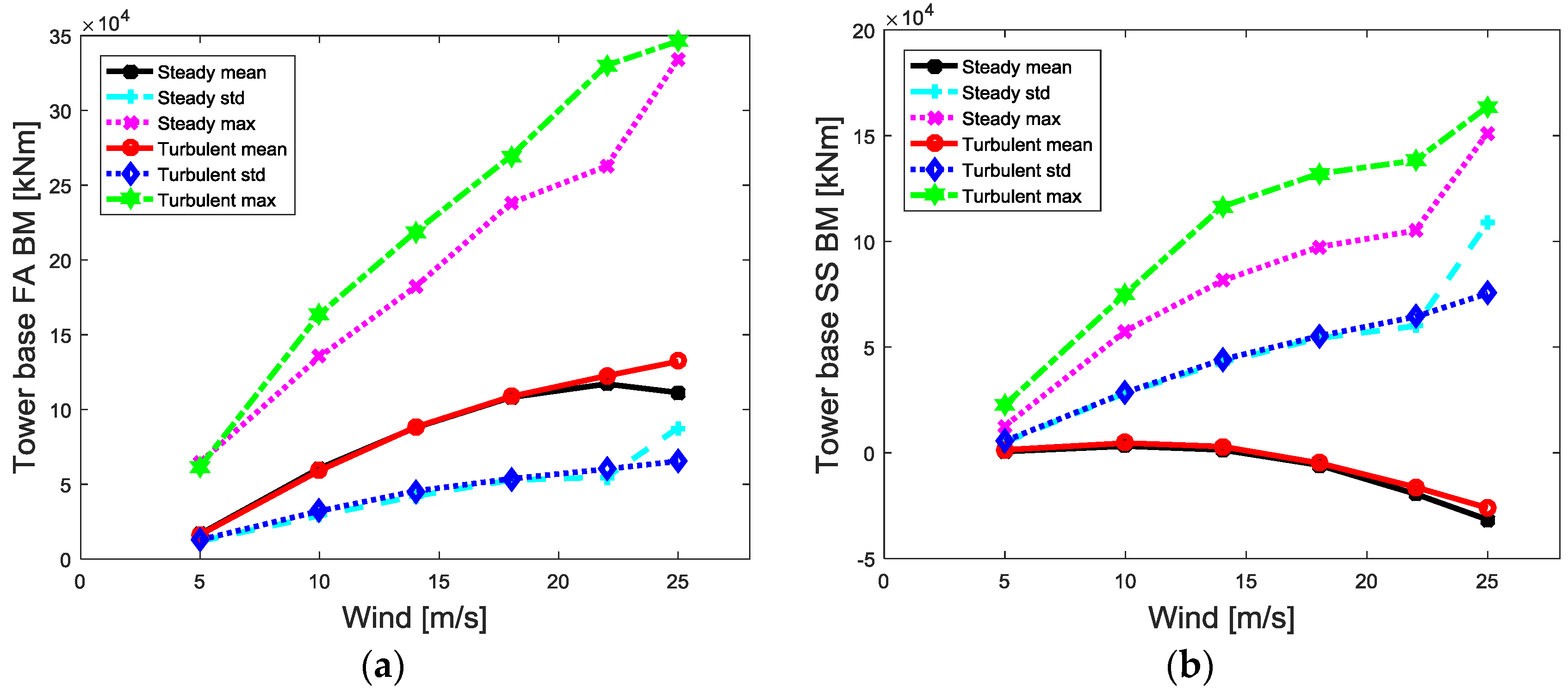
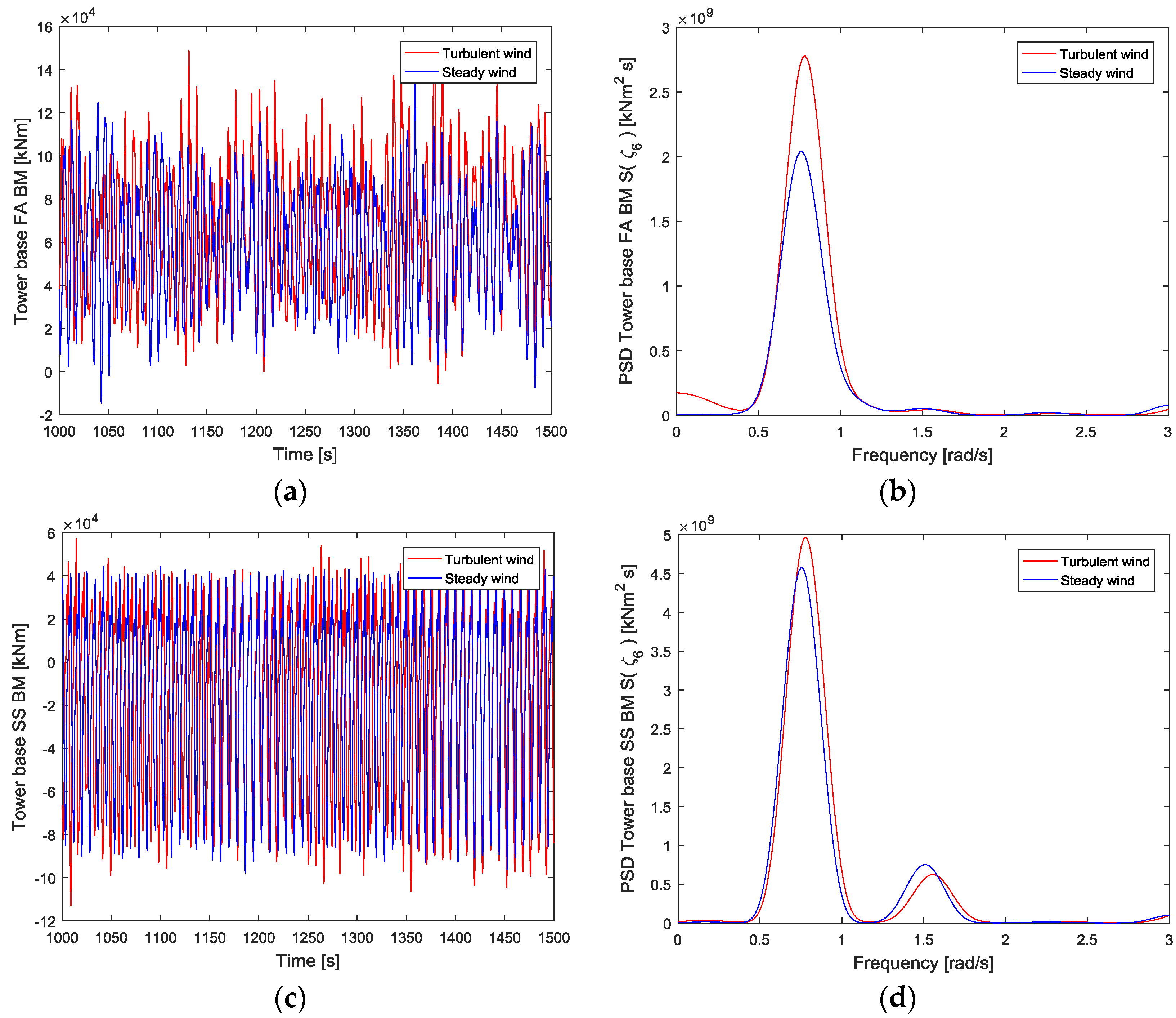
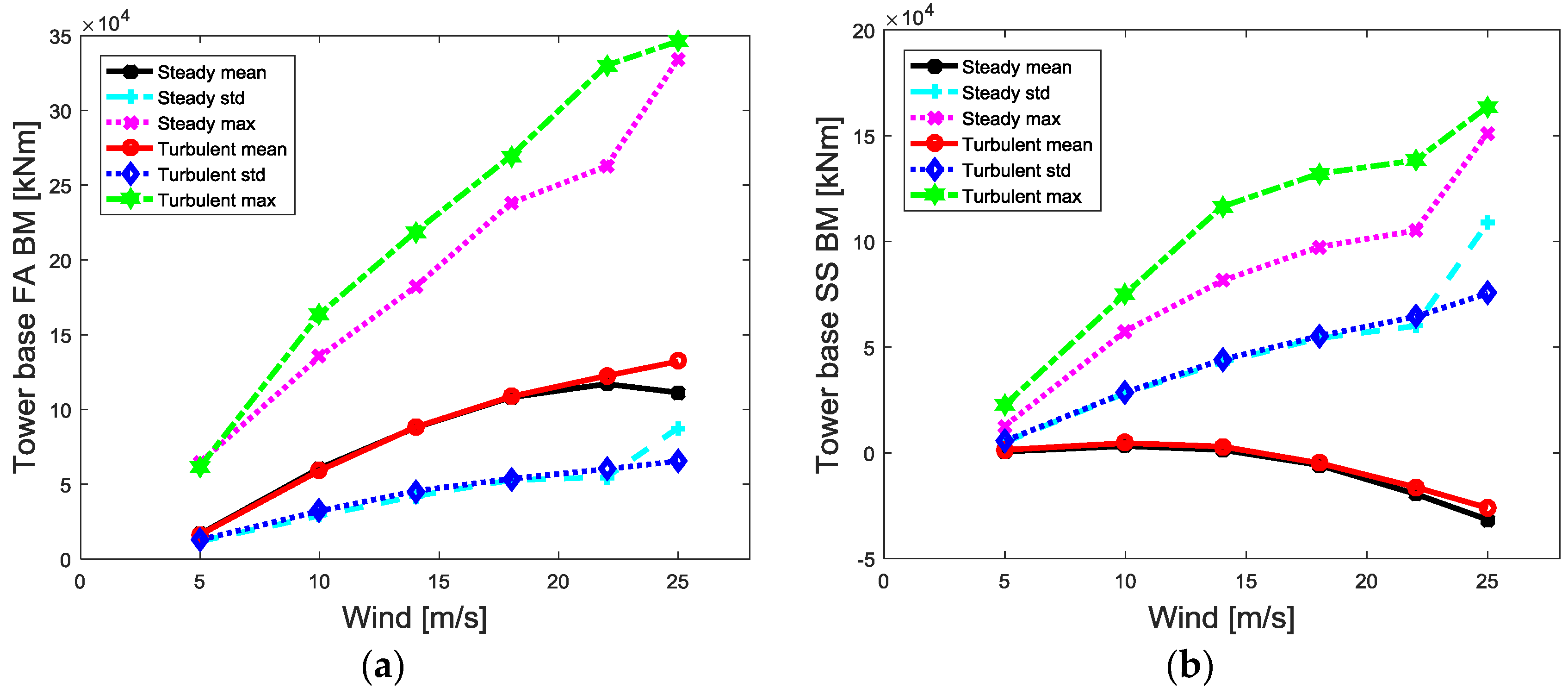
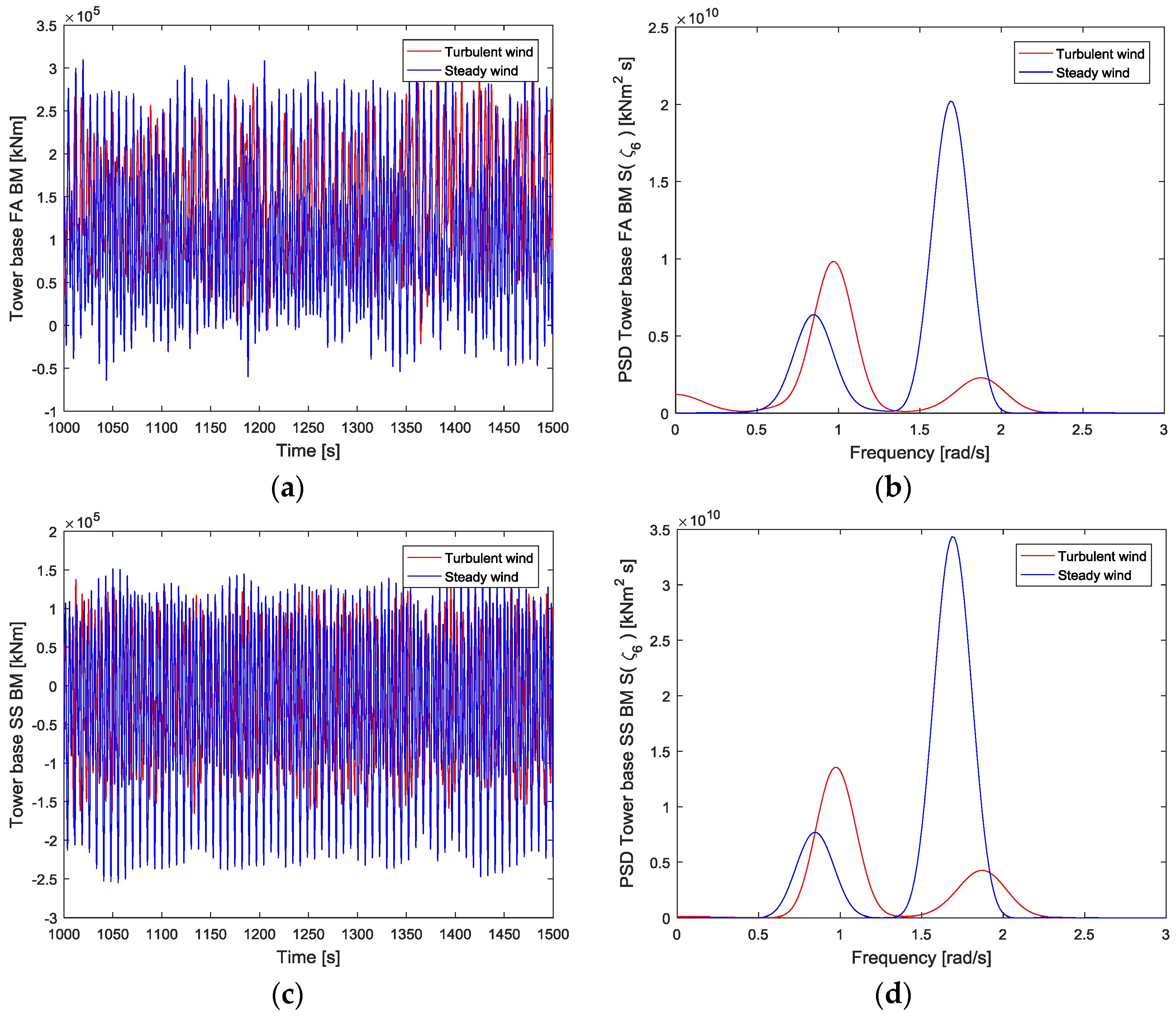
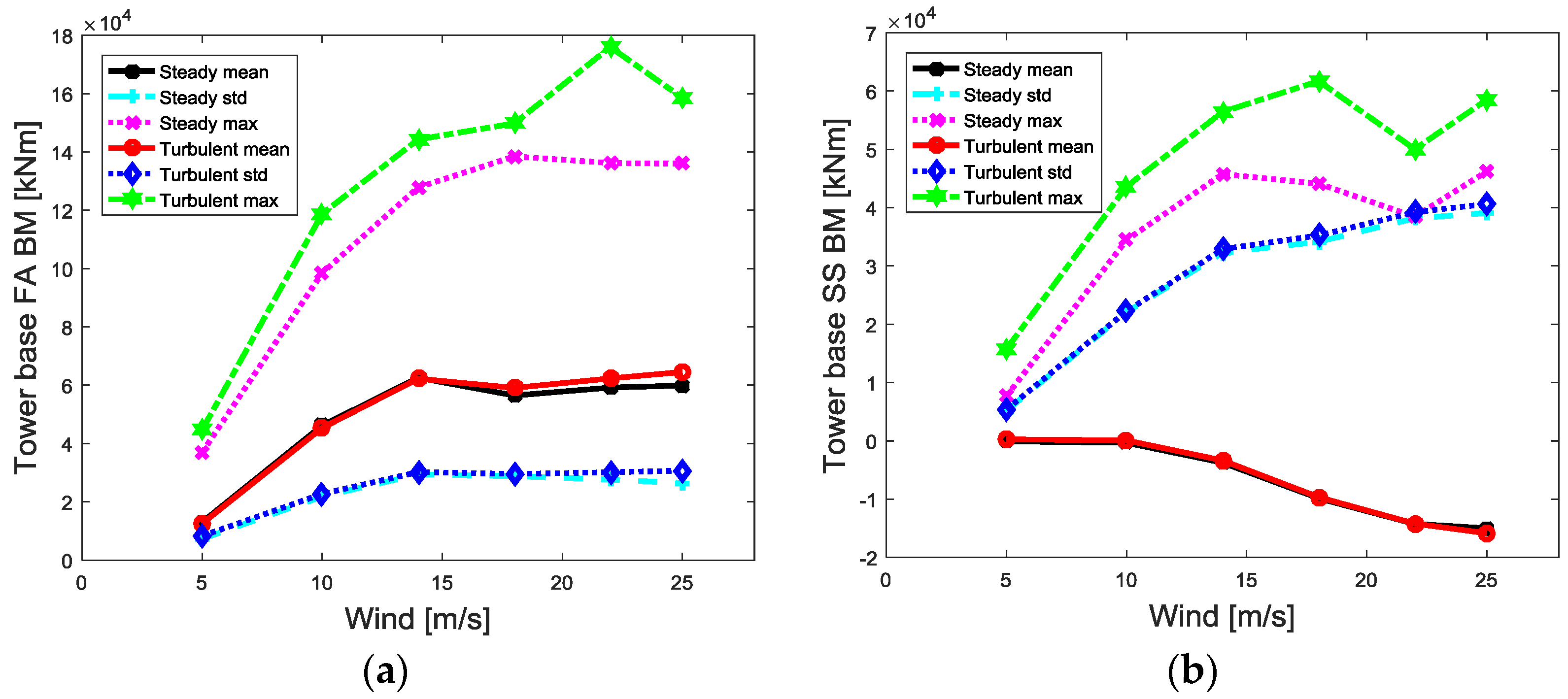
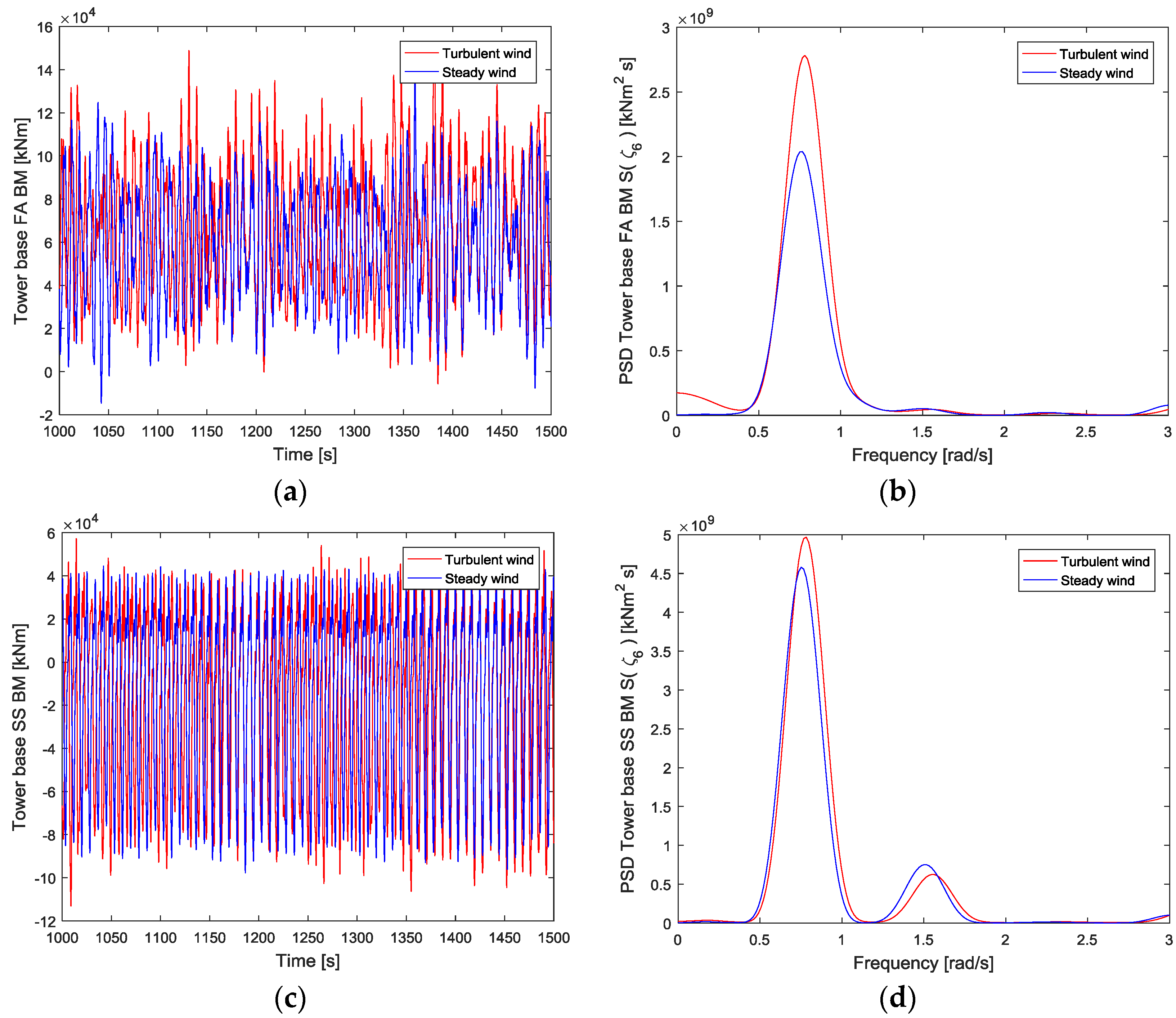
3.1.3. Effect of Turbulence on the Tower Base Bending Moments
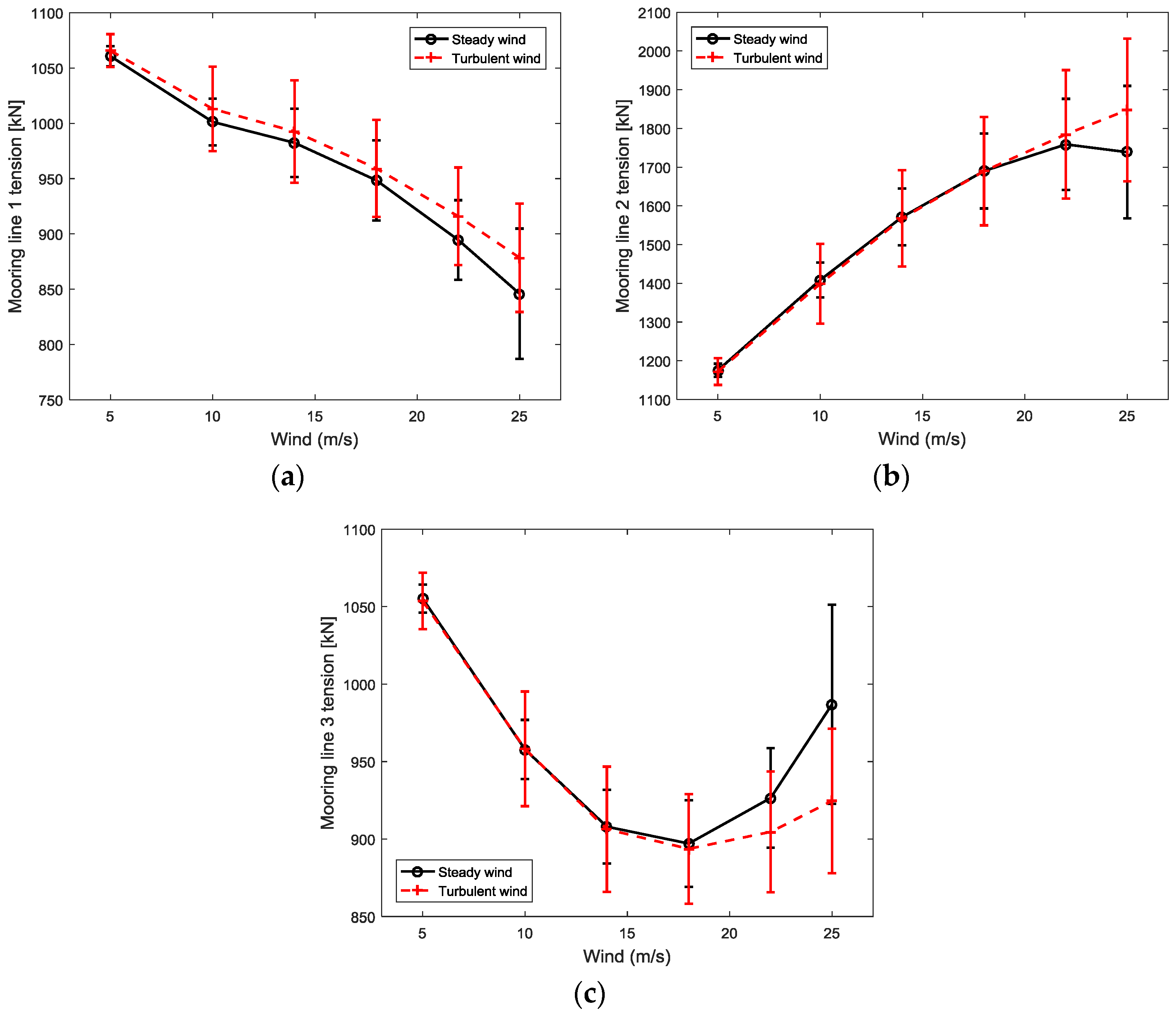
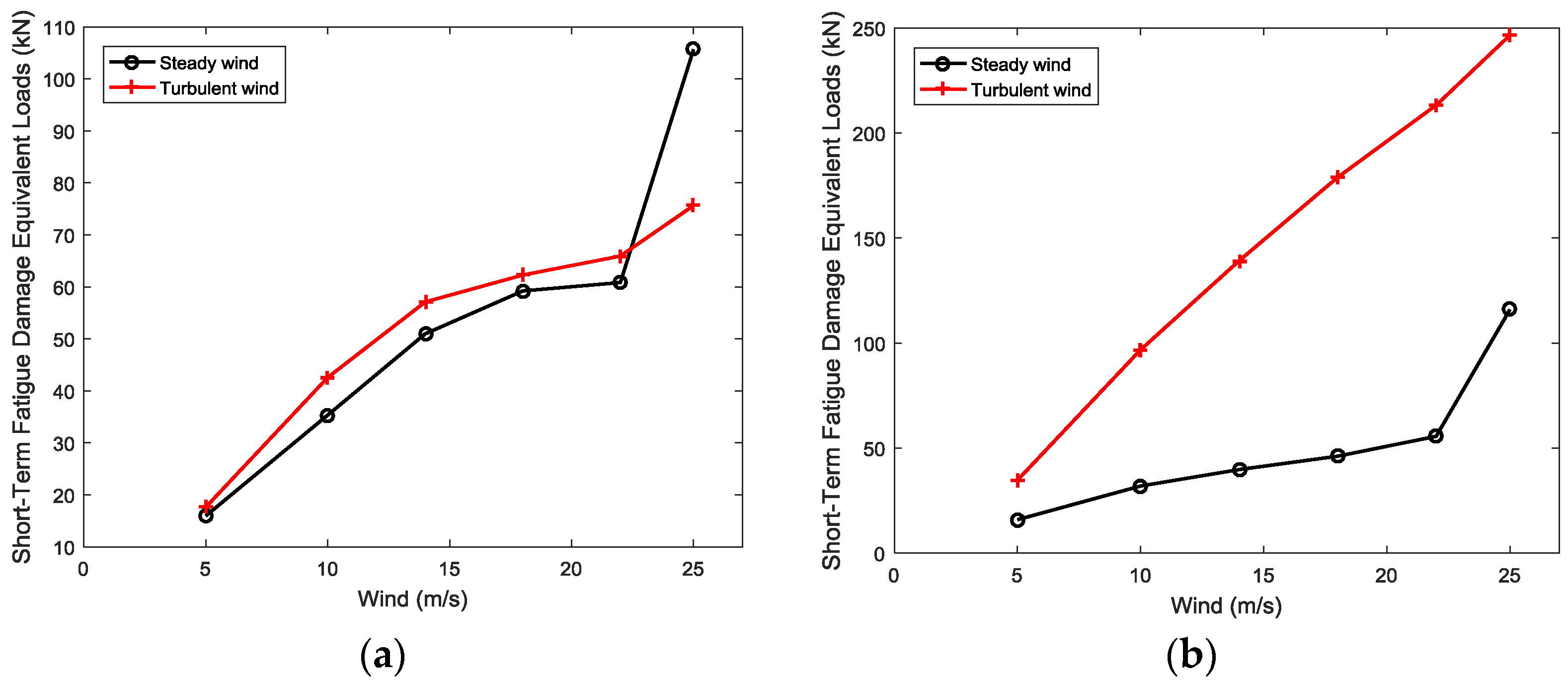
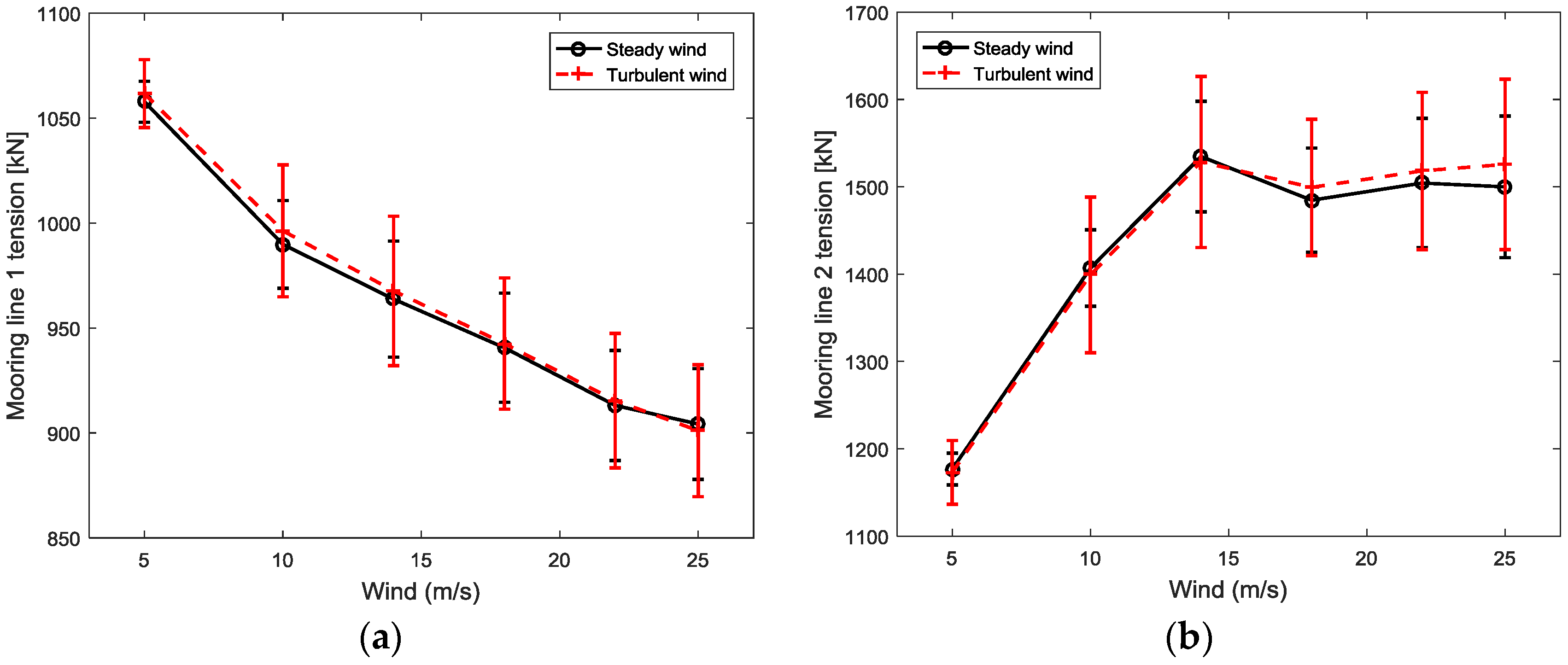
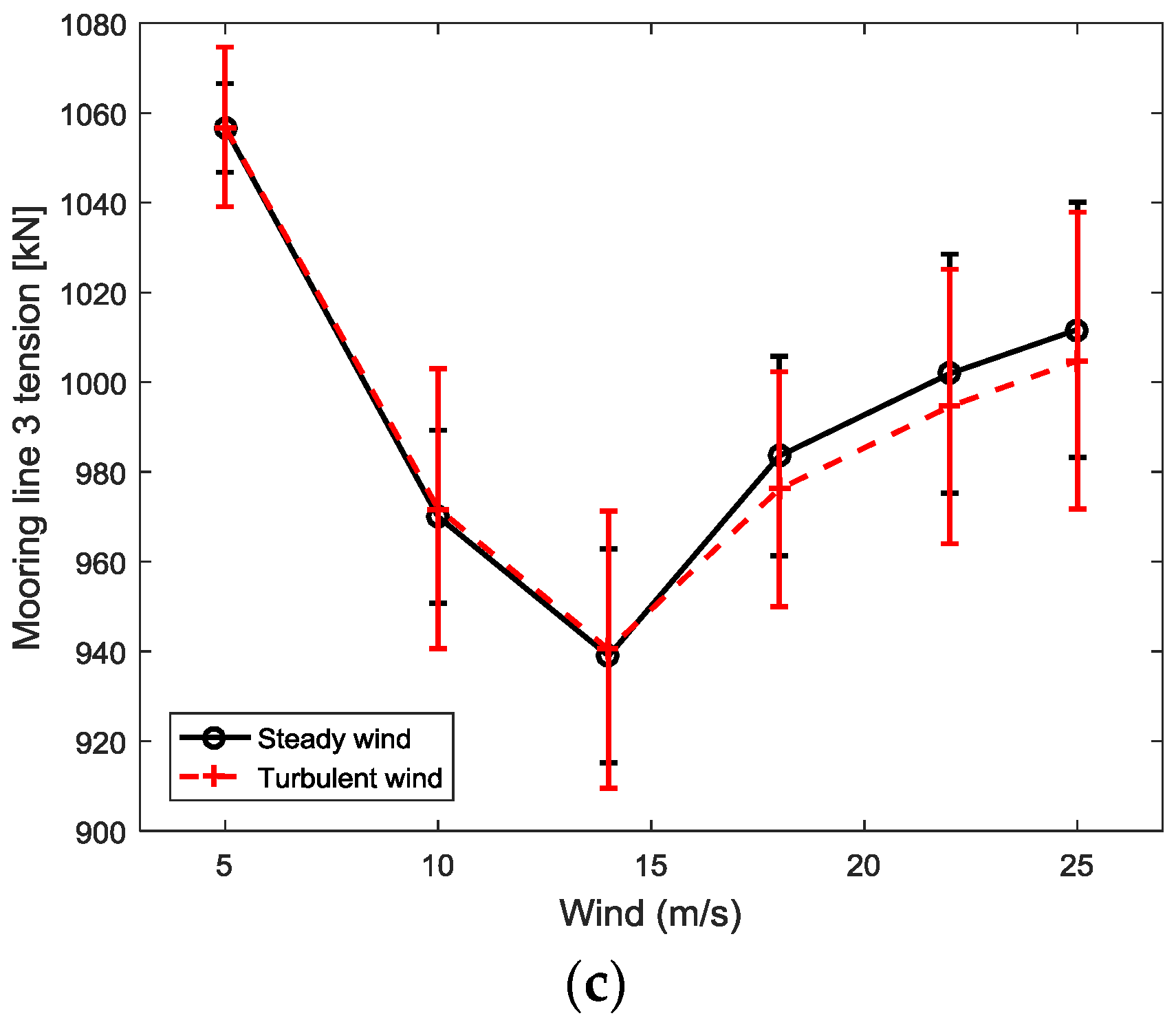
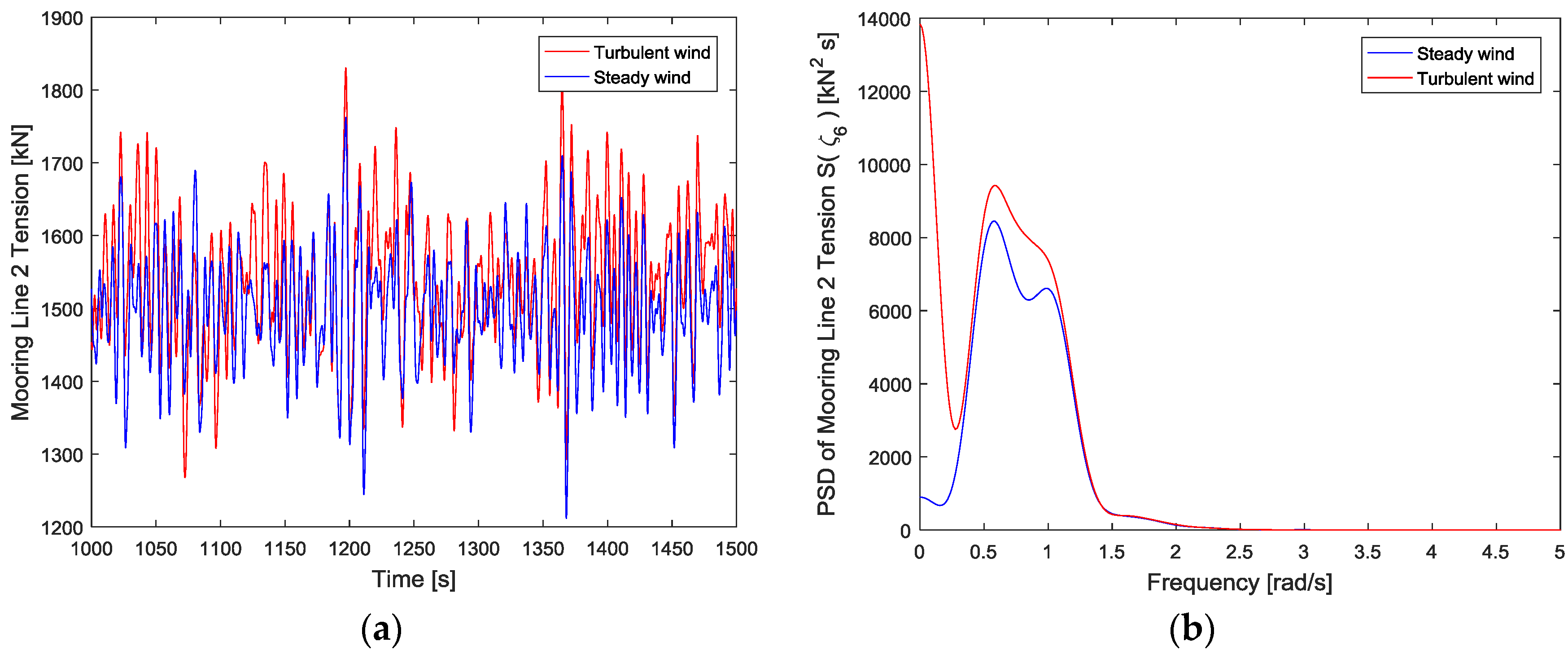
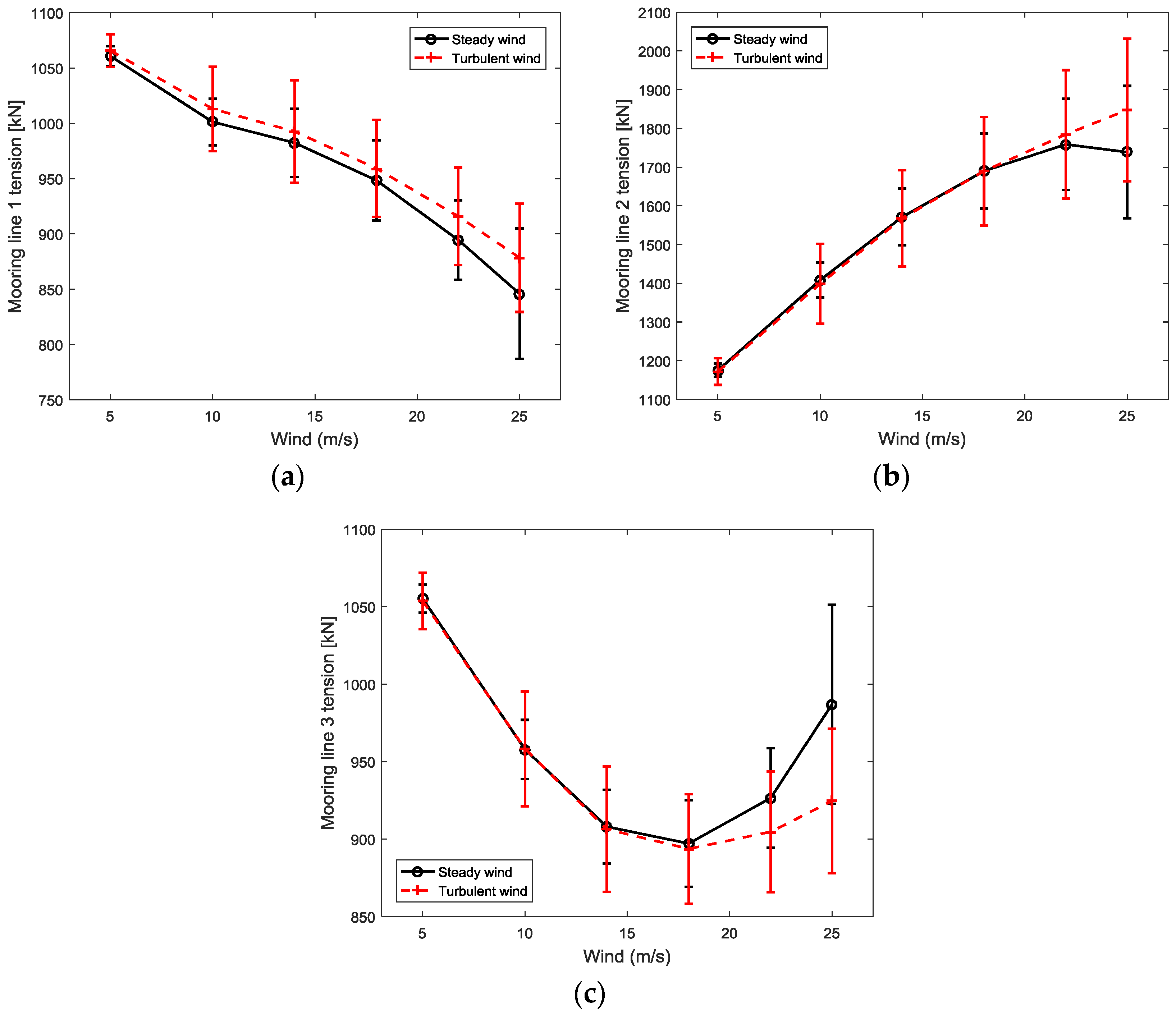
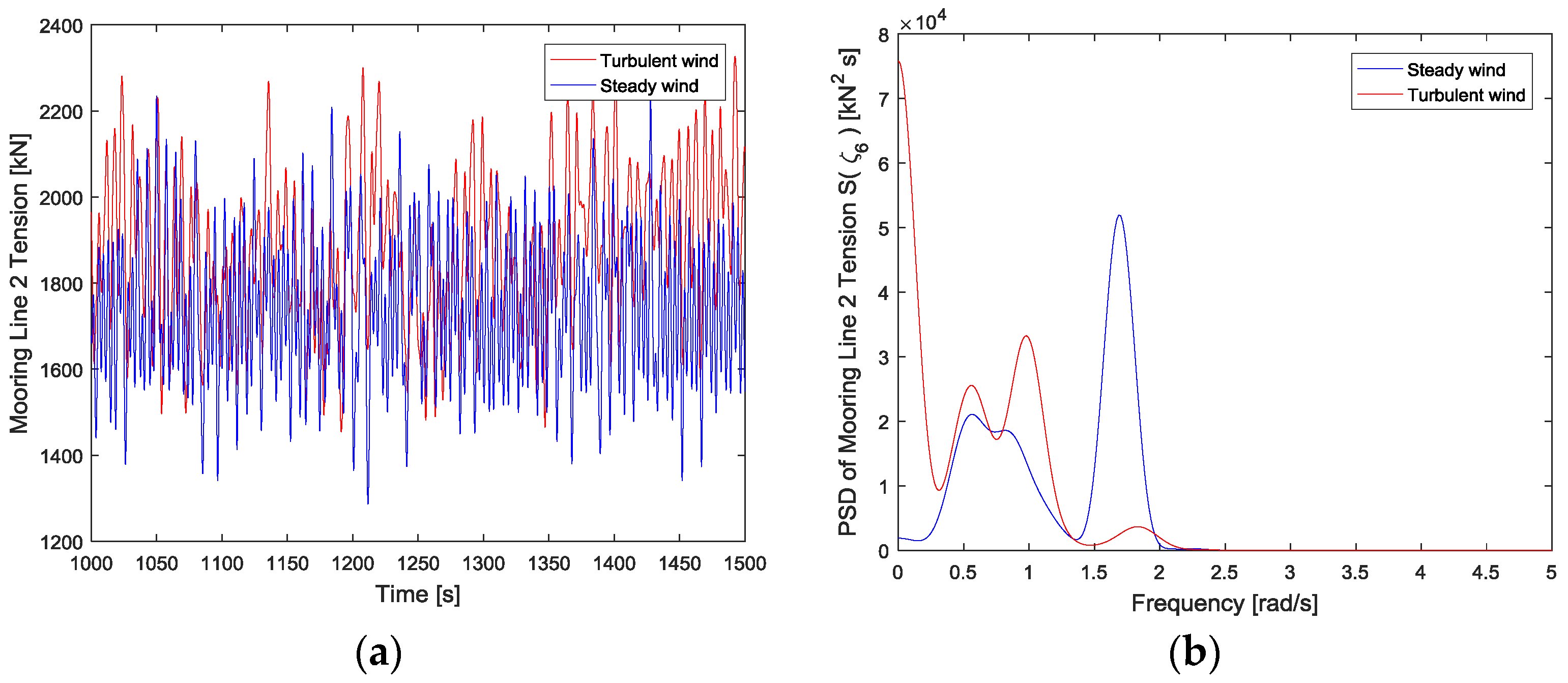
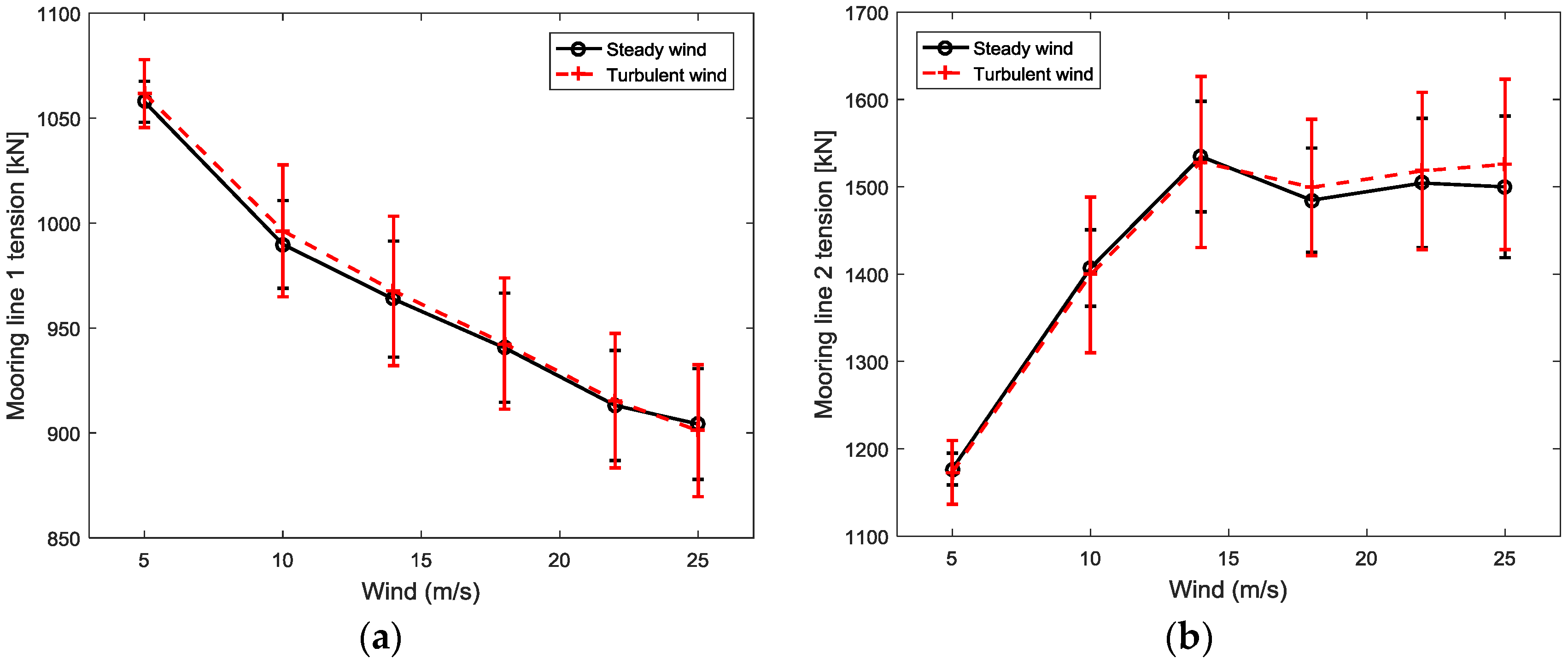
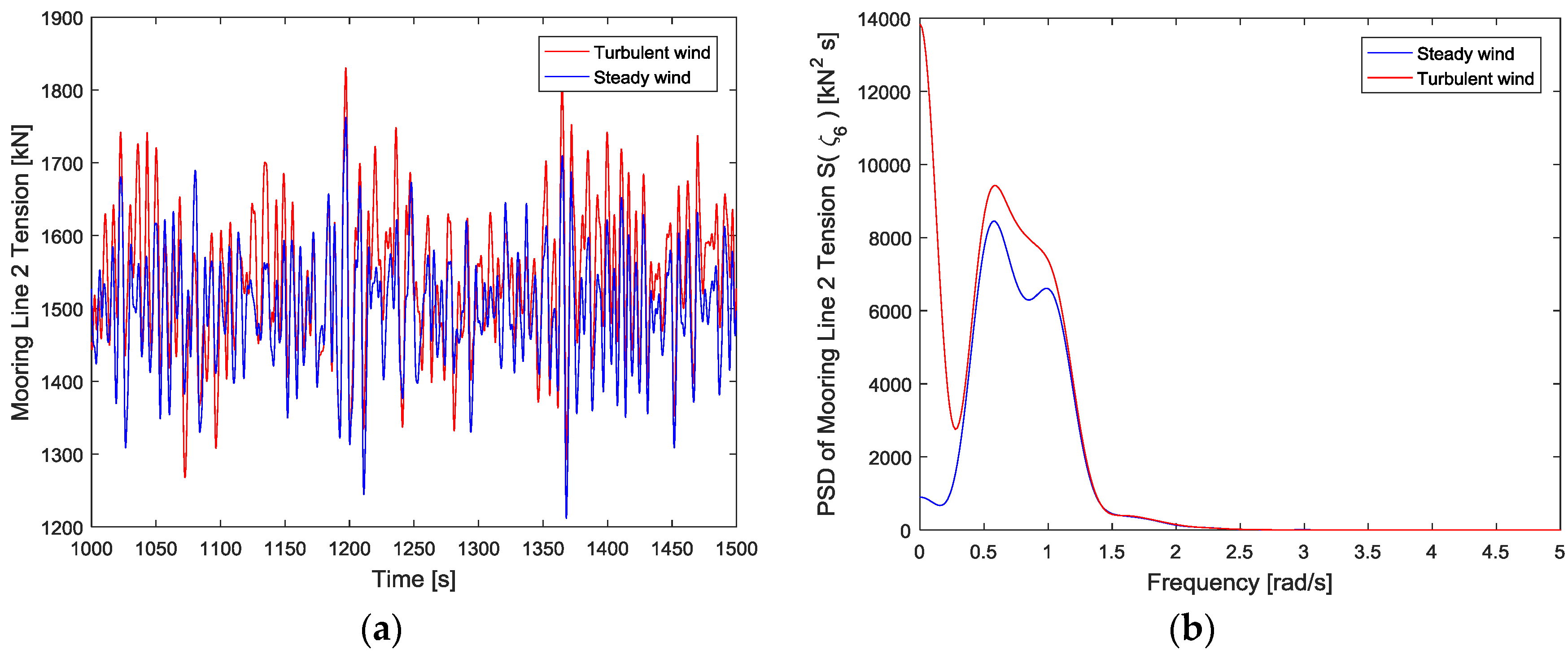
3.1.4. Effect of Turbulence on the Mooring Lines Tension
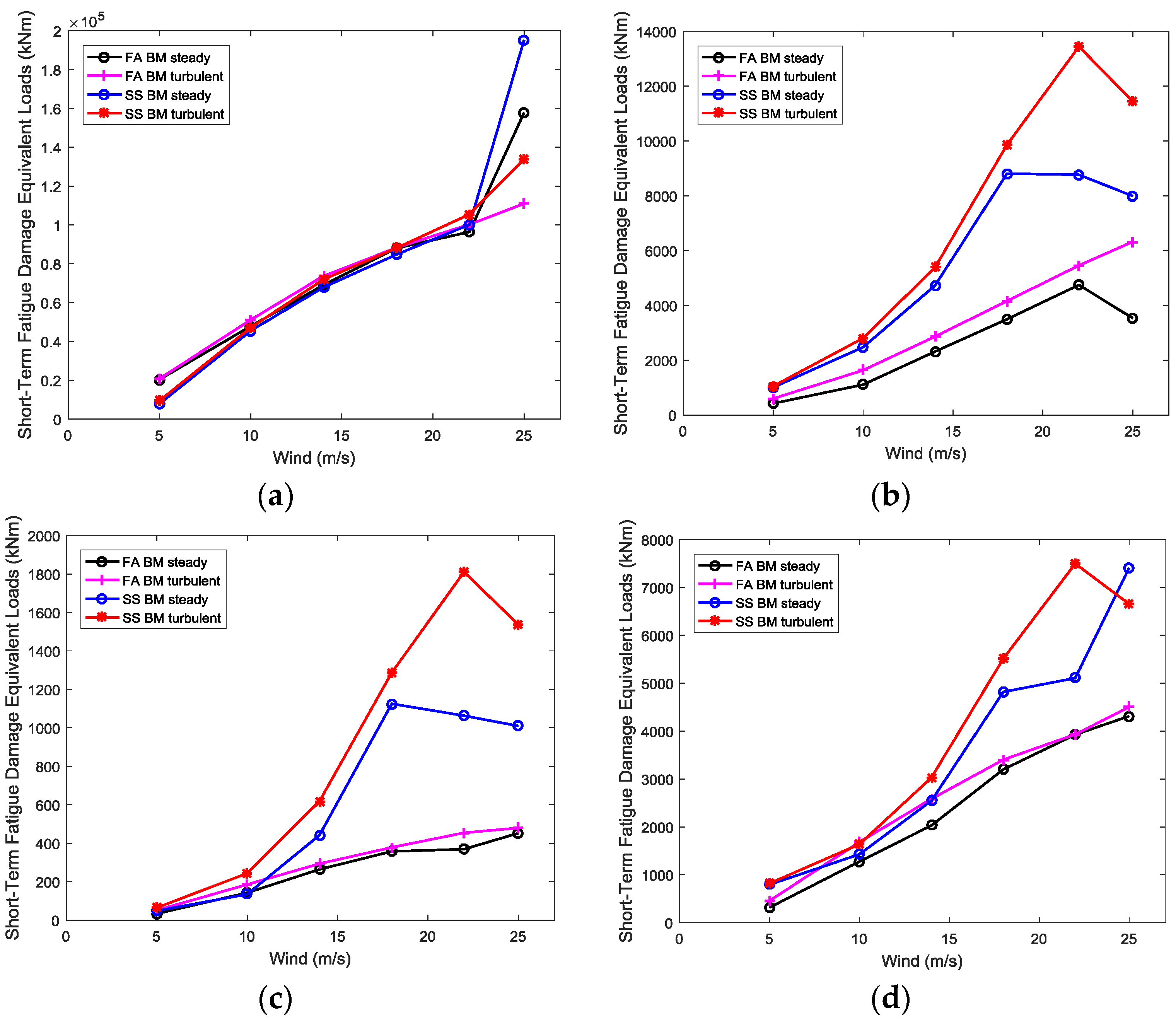
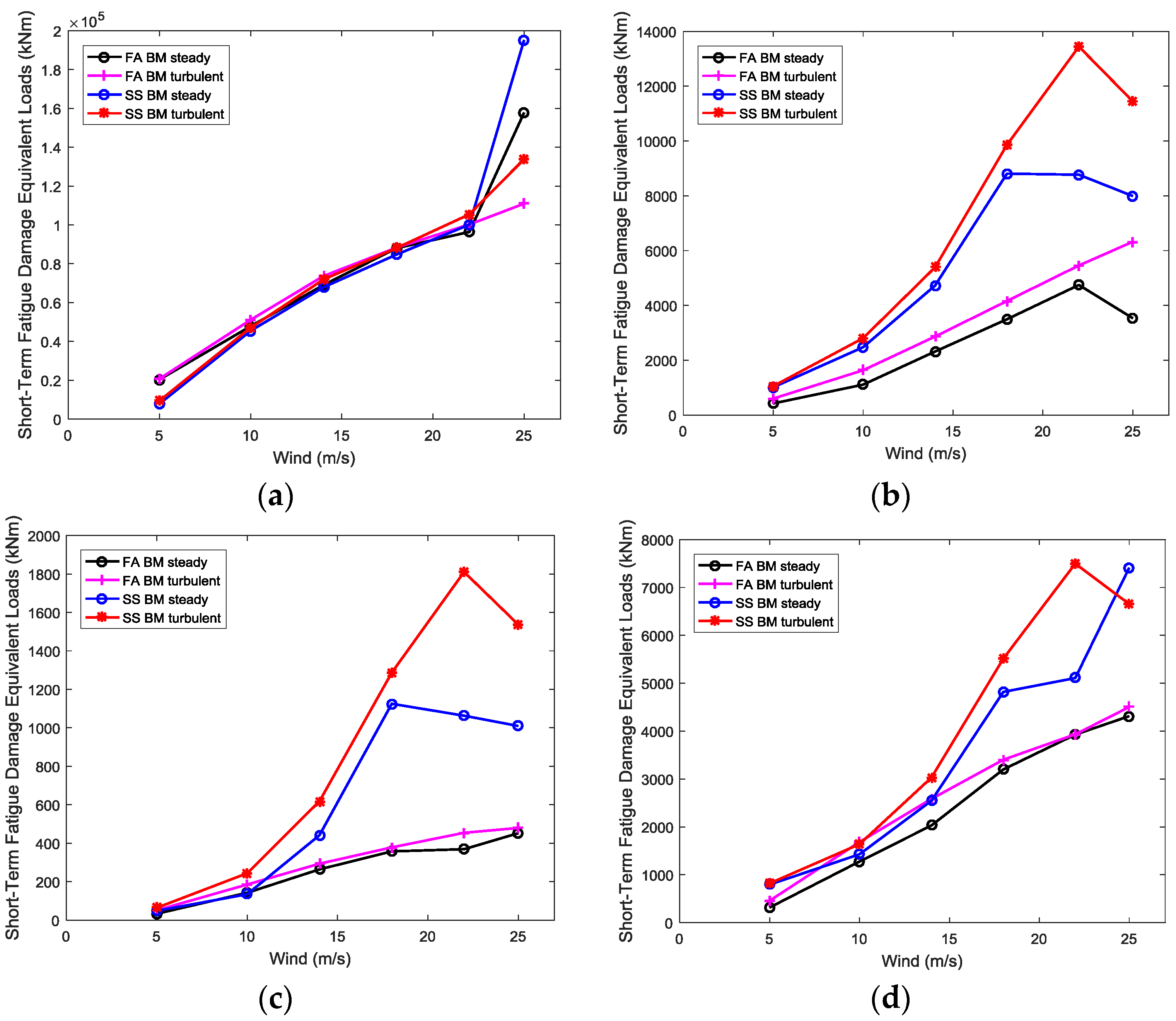
3.1.5. Effect of Turbulence on the Fatigue Damage of Flexible Components
3.2. Dynamic Response Analysis of the 5 MW Optimised FVAWT
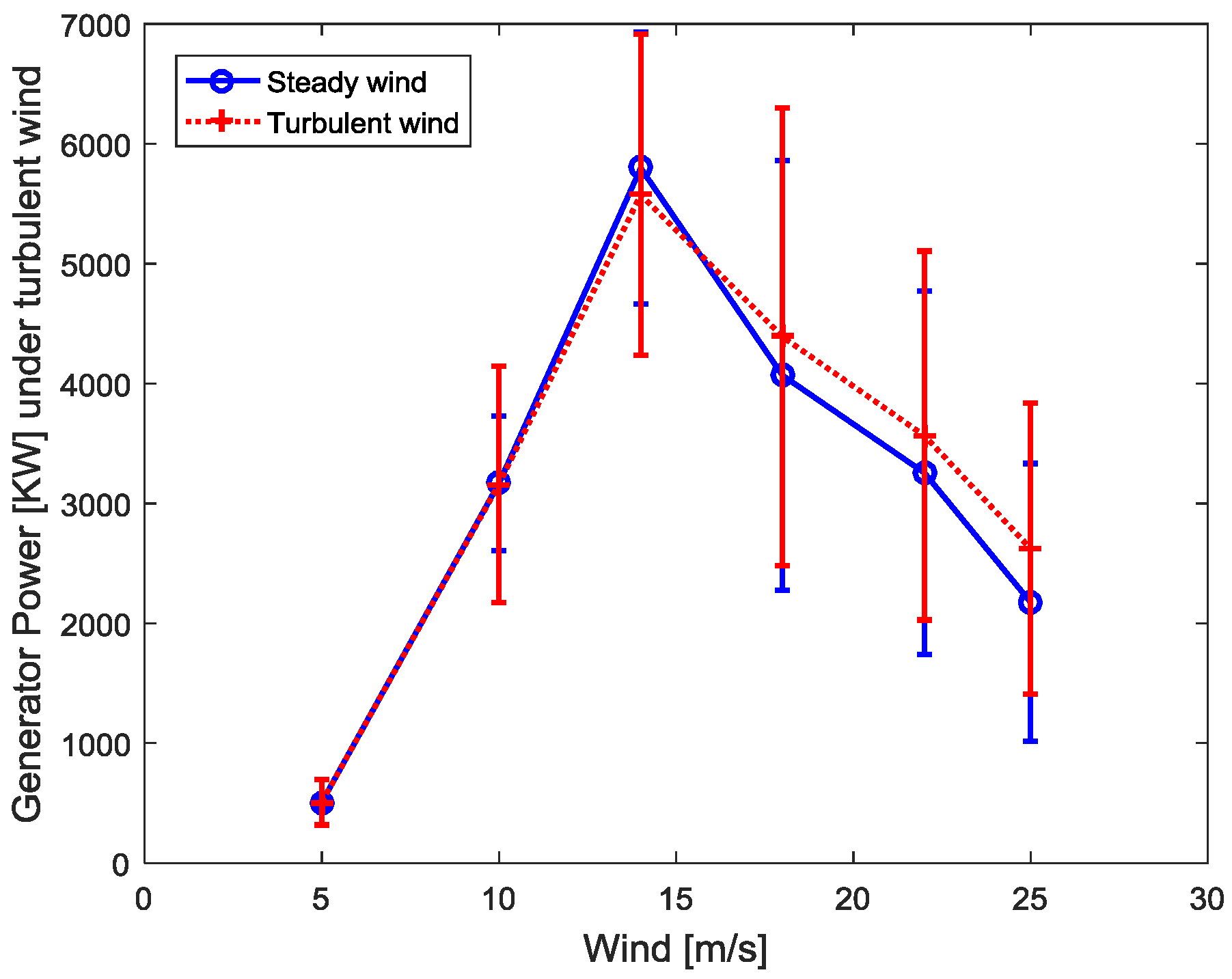
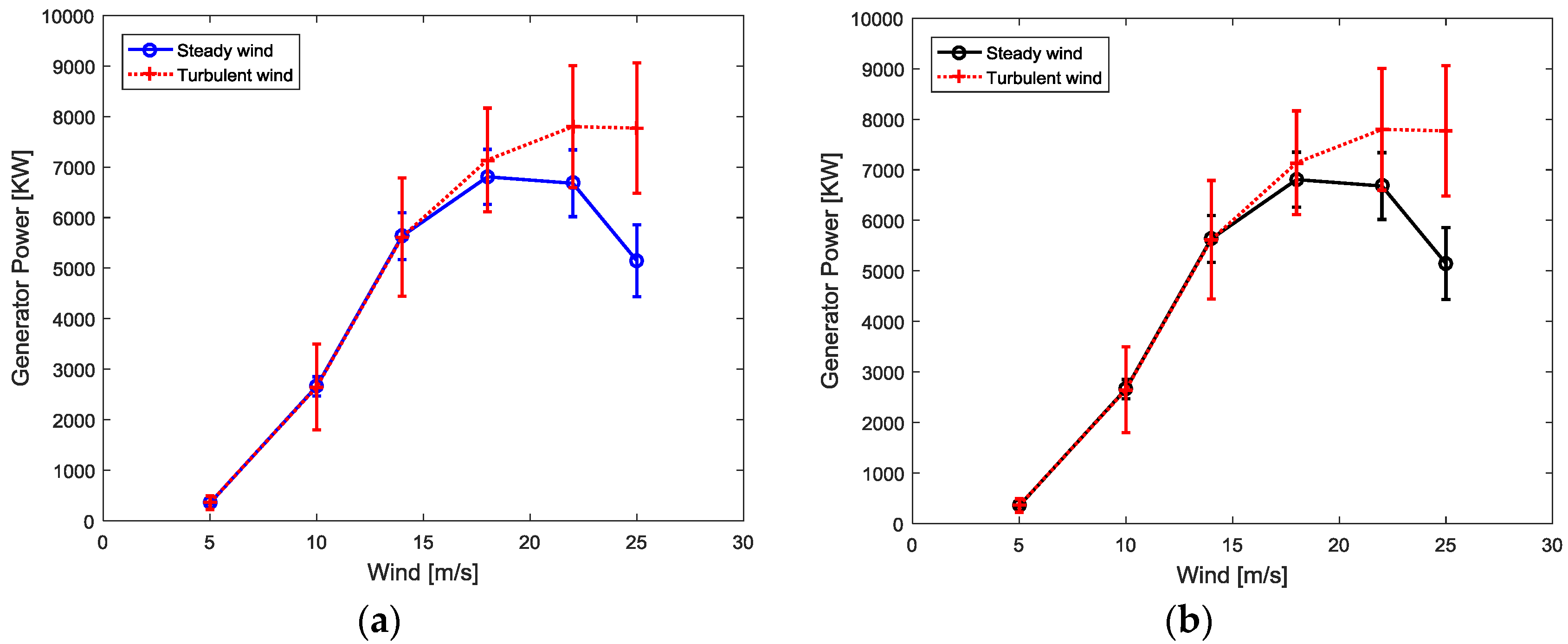
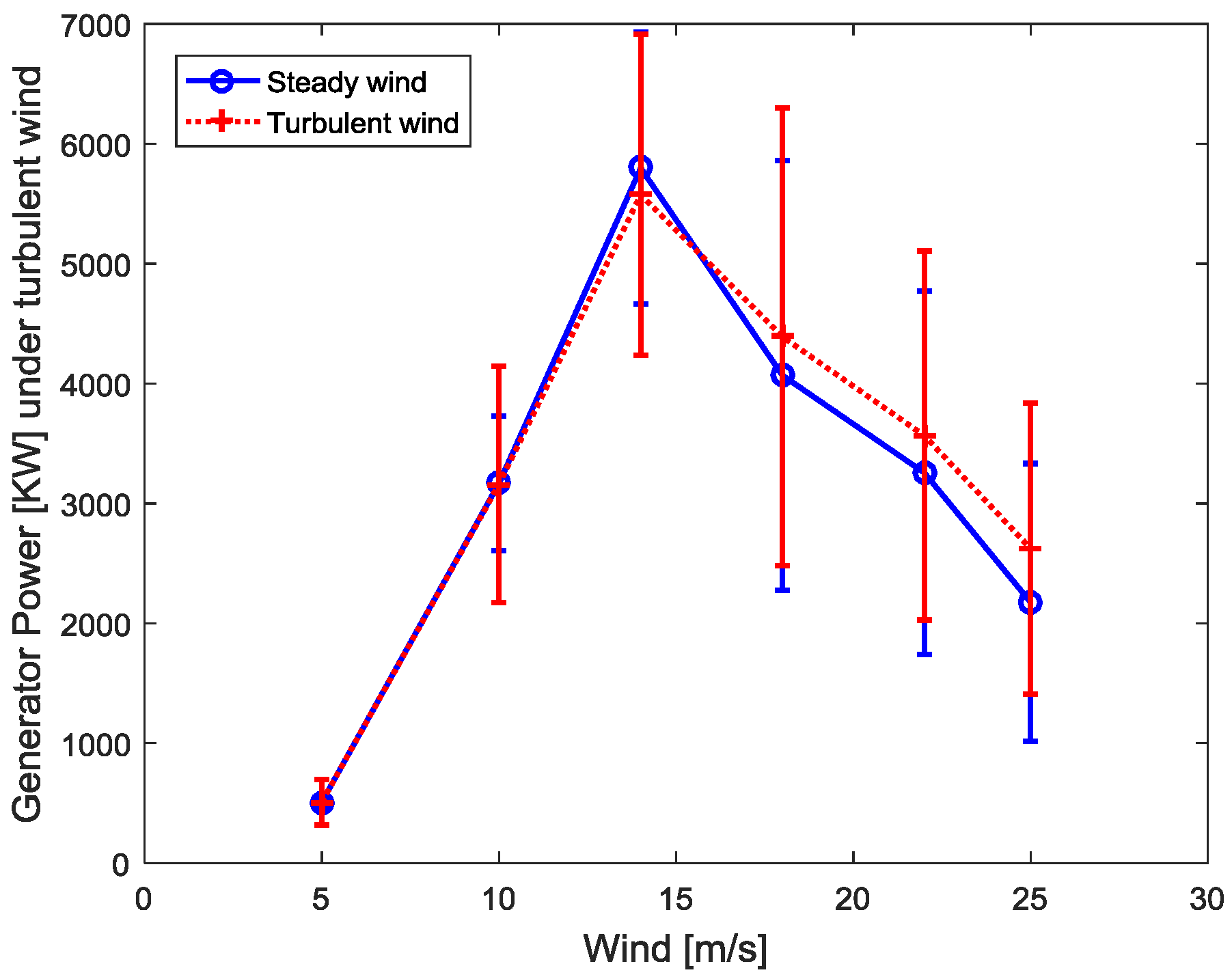
3.2.1. Effect of Turbulence on Power Generation
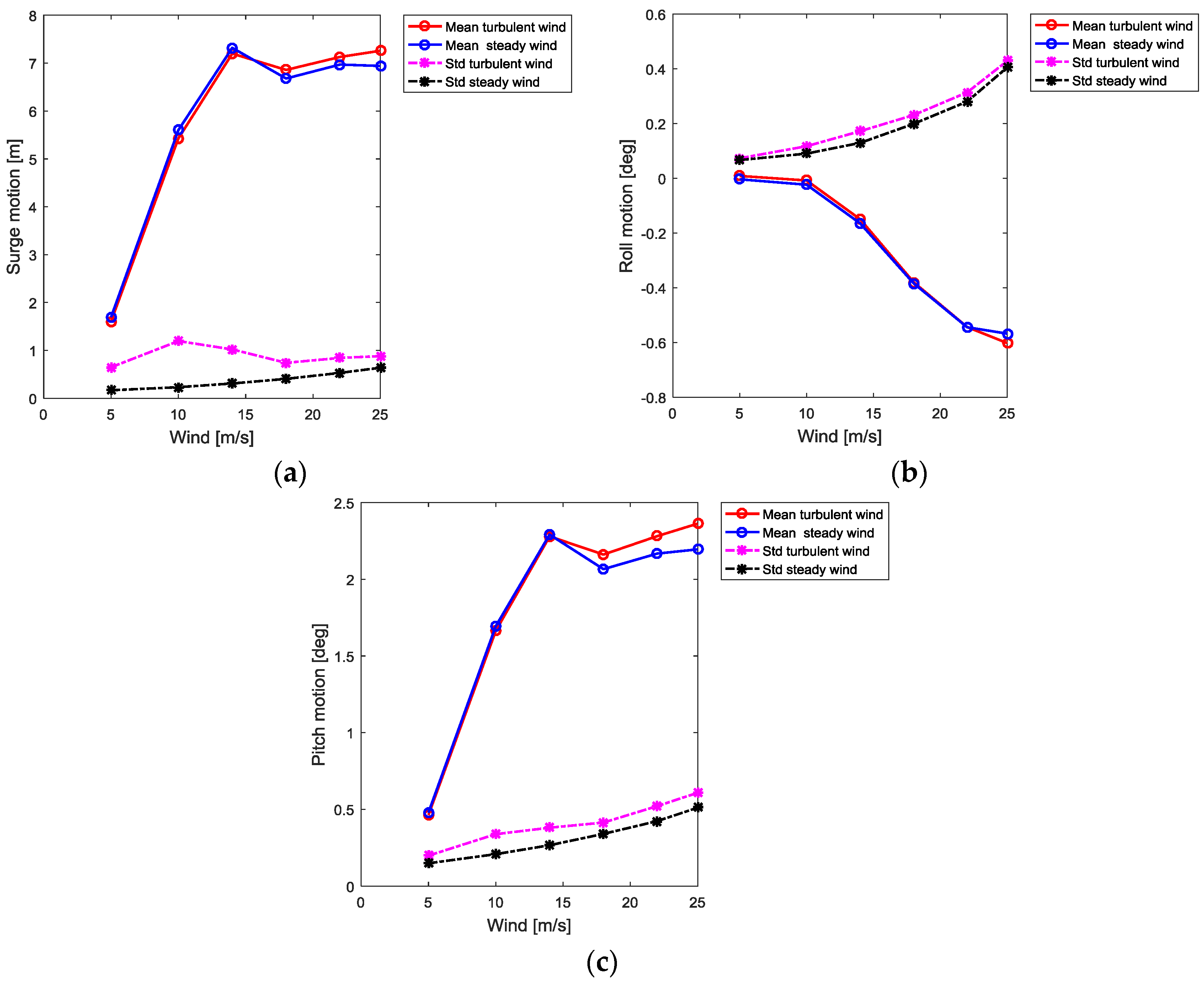
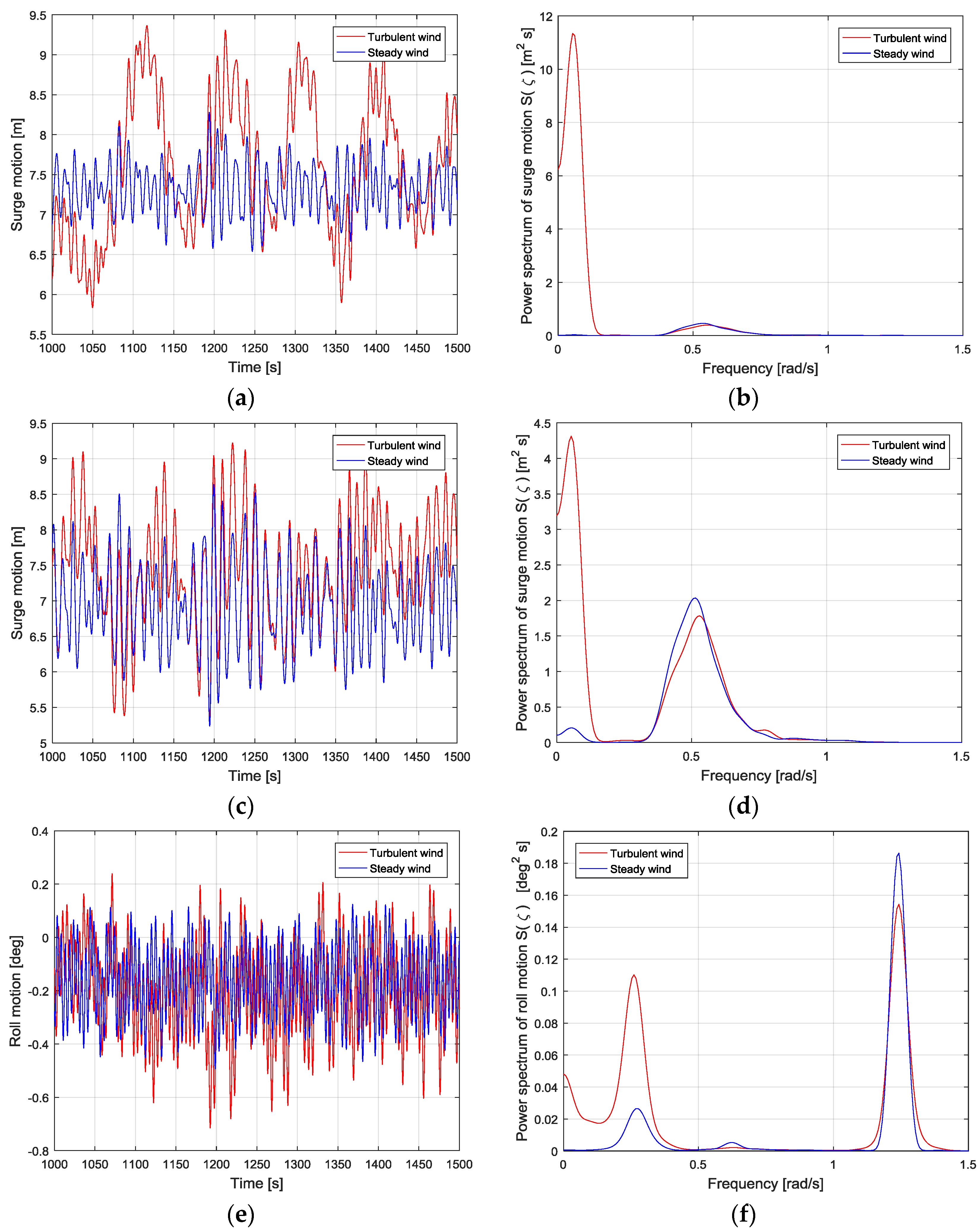
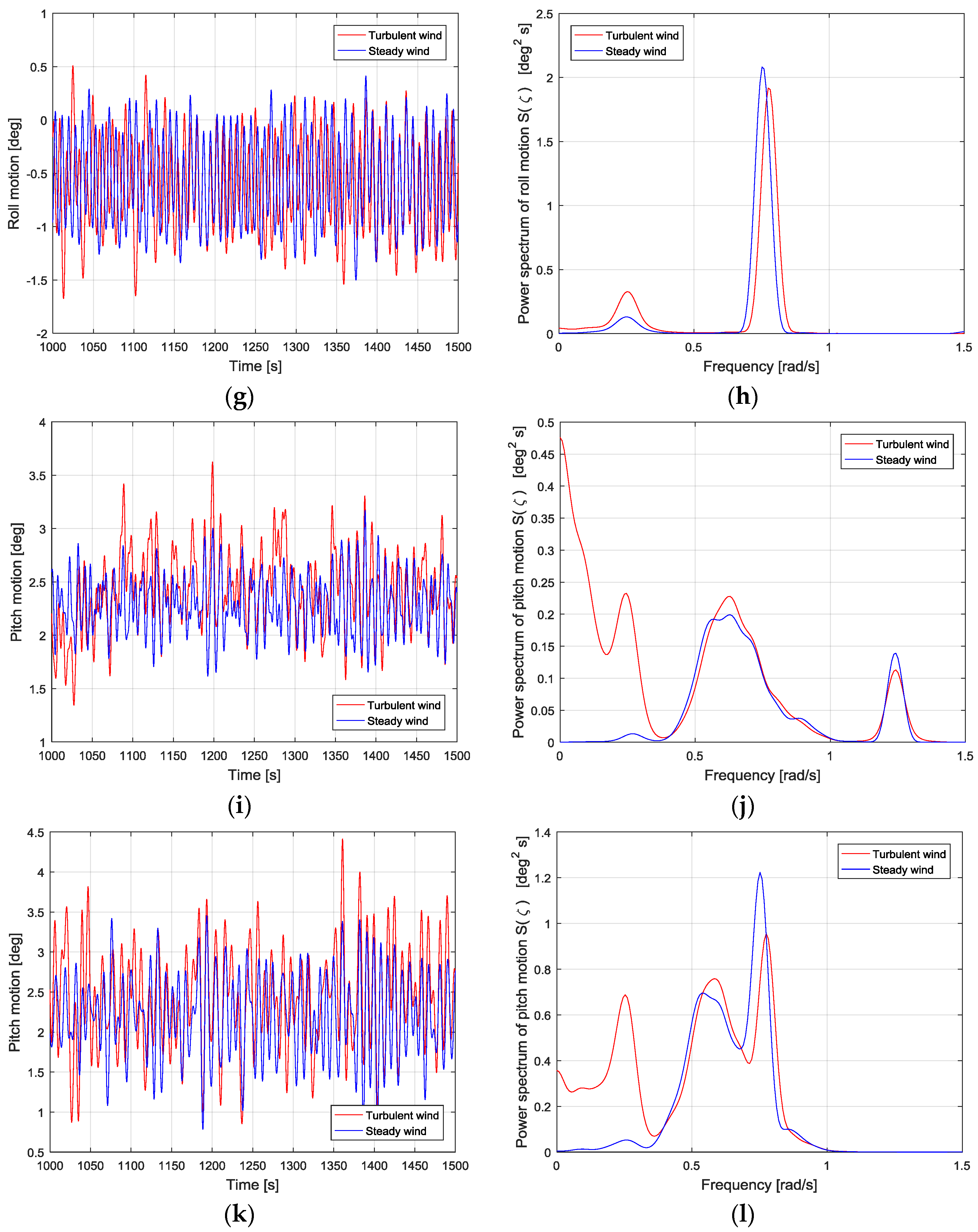
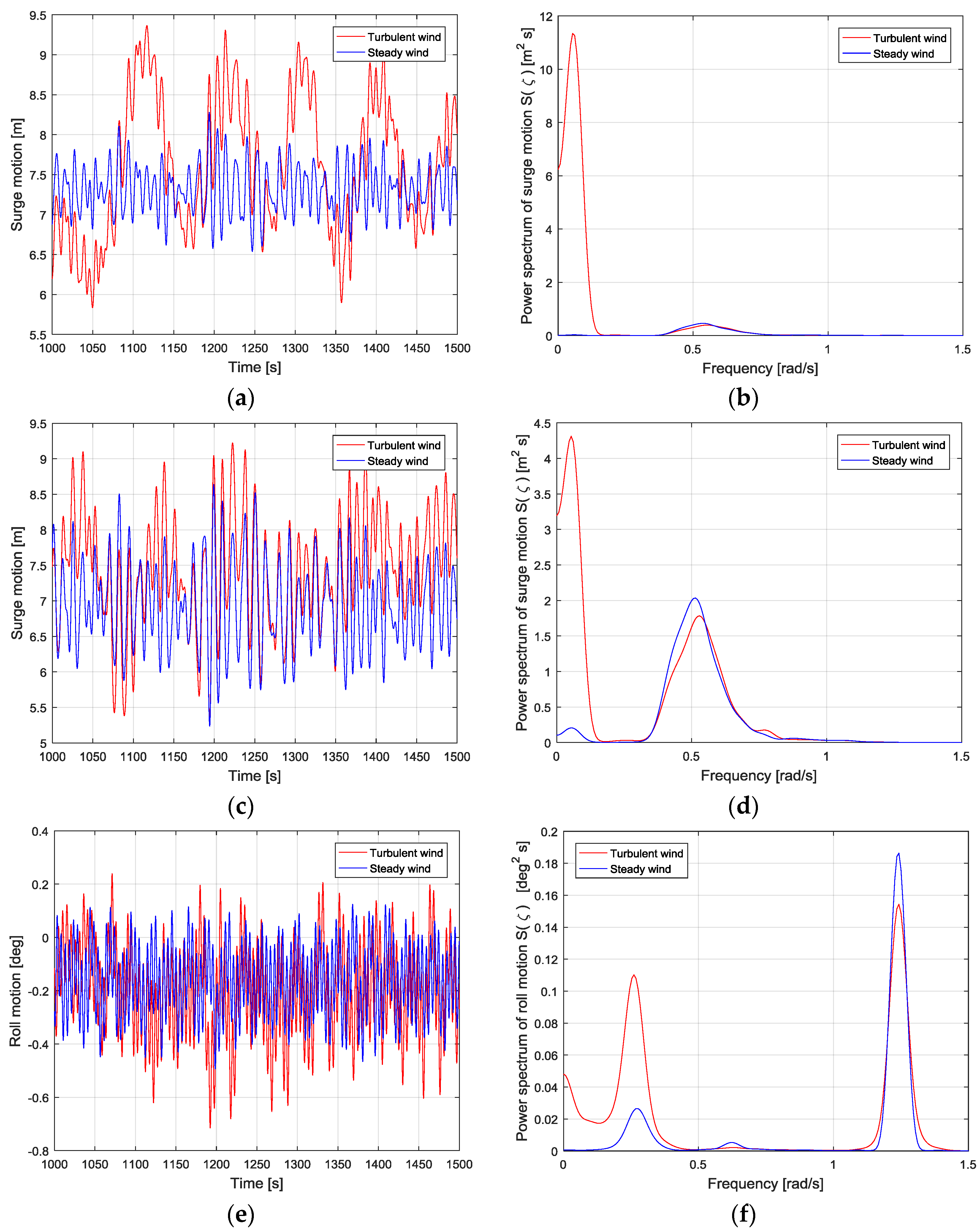
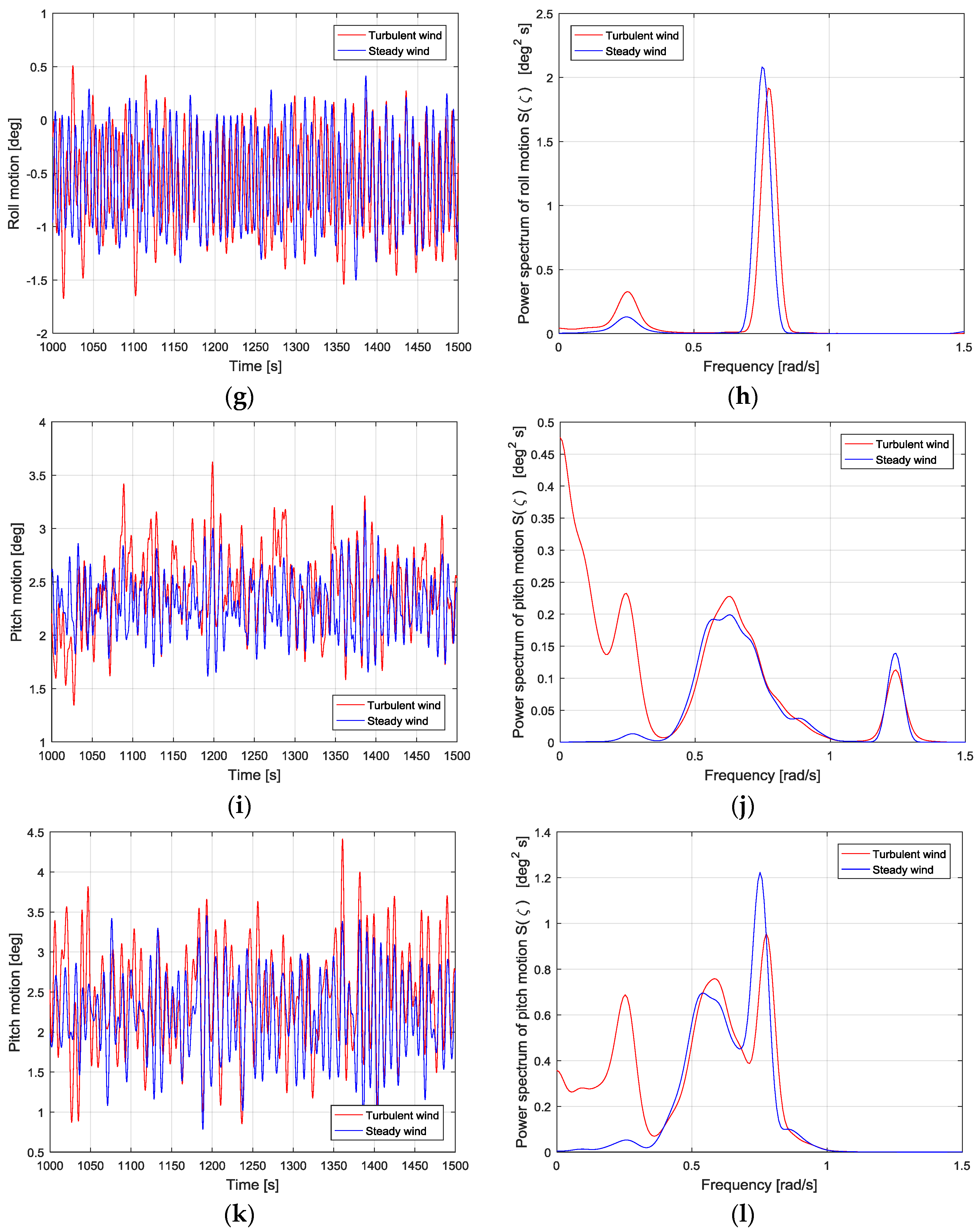
3.2.2. Effect of Turbulence on Platform Global Motion
- Environmental condition at the rated wind speed of 14 m/s DLC 3 (V = 14 m/s, Hs = 3.62 m and Tp = 10.29 s).
- Environmental condition at the cut-out wind speed of 25 m/s DLC 6 (V = 25 m/s, Hs = 6.02 m and Tp = 12.38 s).
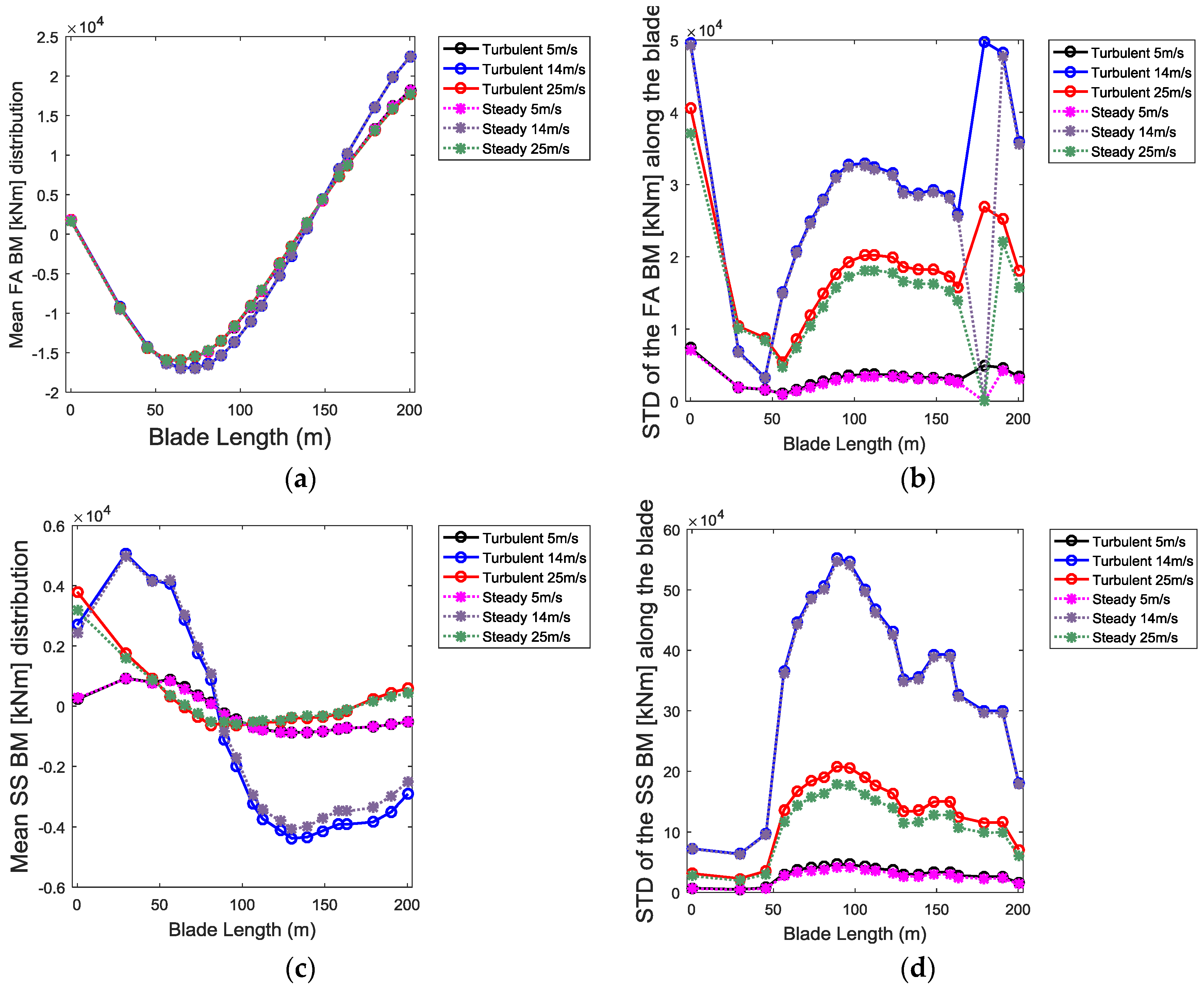
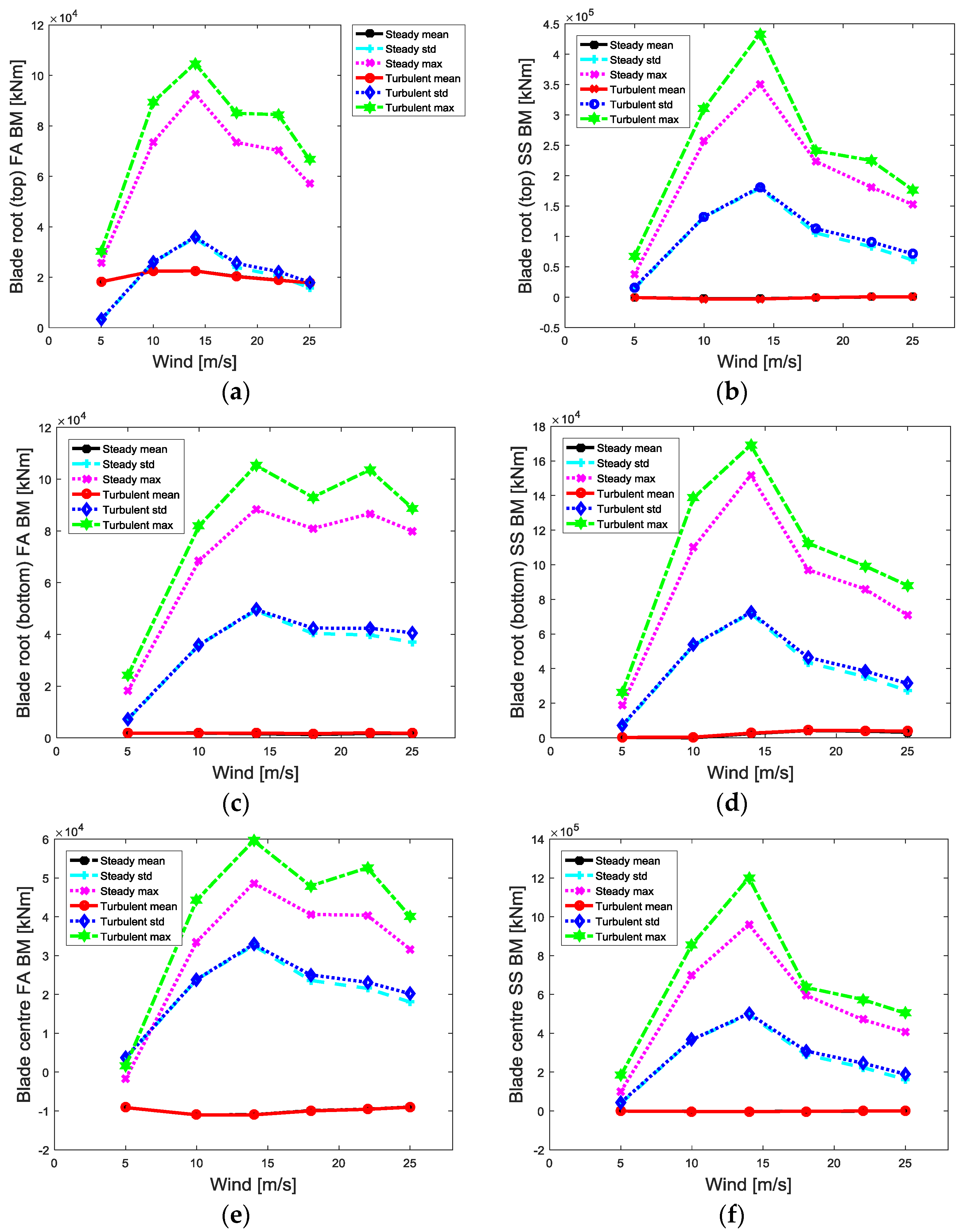
3.2.3. Effect of Turbulence on the Blade Bending Moments
3.2.4. Effect of Turbulence on the Tower Base Bending Moments
3.2.5. Effect of Turbulence on the Mooring Lines Tension
3.2.6. Effect of Turbulence on the Fatigue Damage on Flexible Components
3.3. Comparison of Responses of the 5 MW Optimised FVAWT with the 5 MW Baseline FVAWT
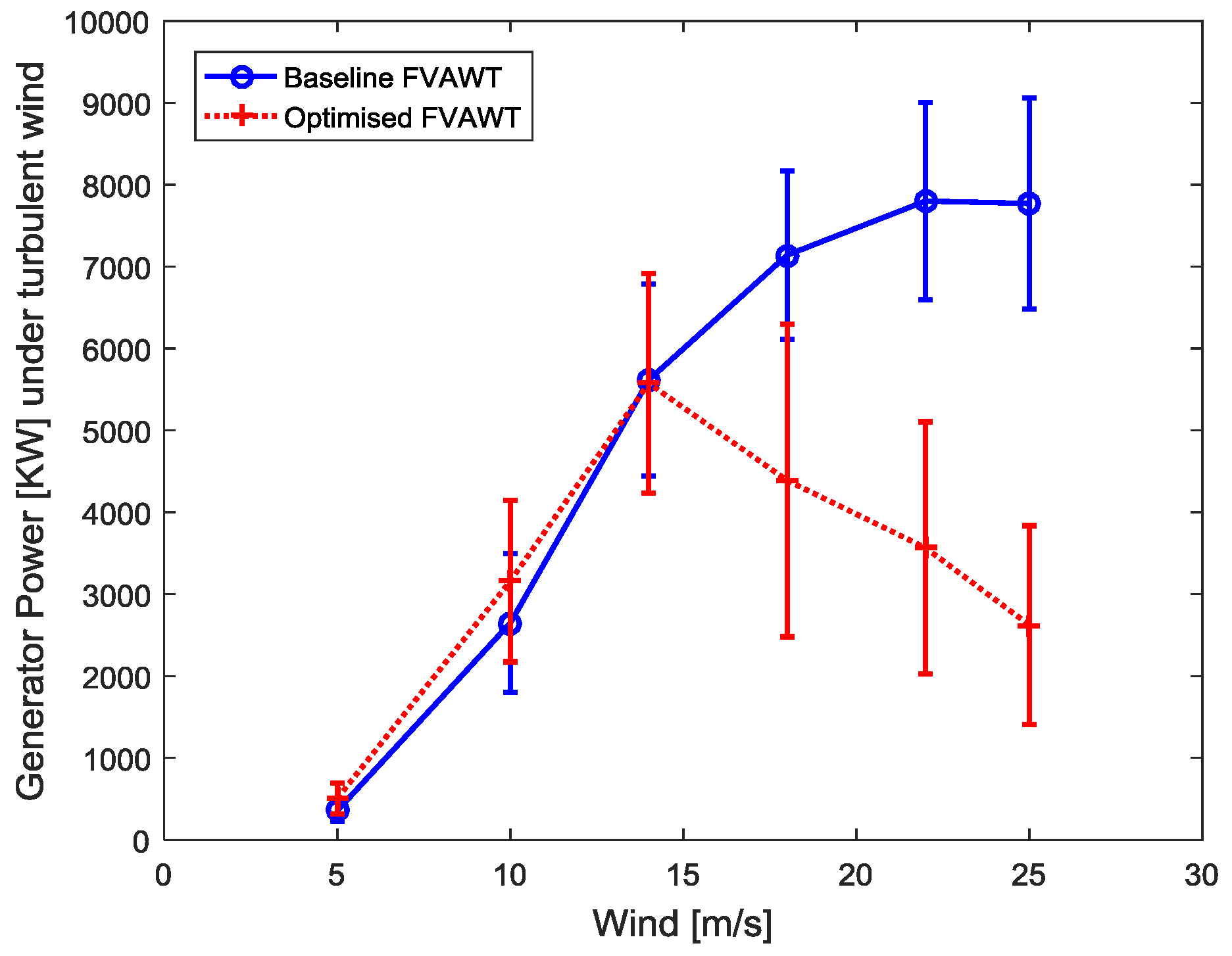
3.3.1. Comparing Power Production
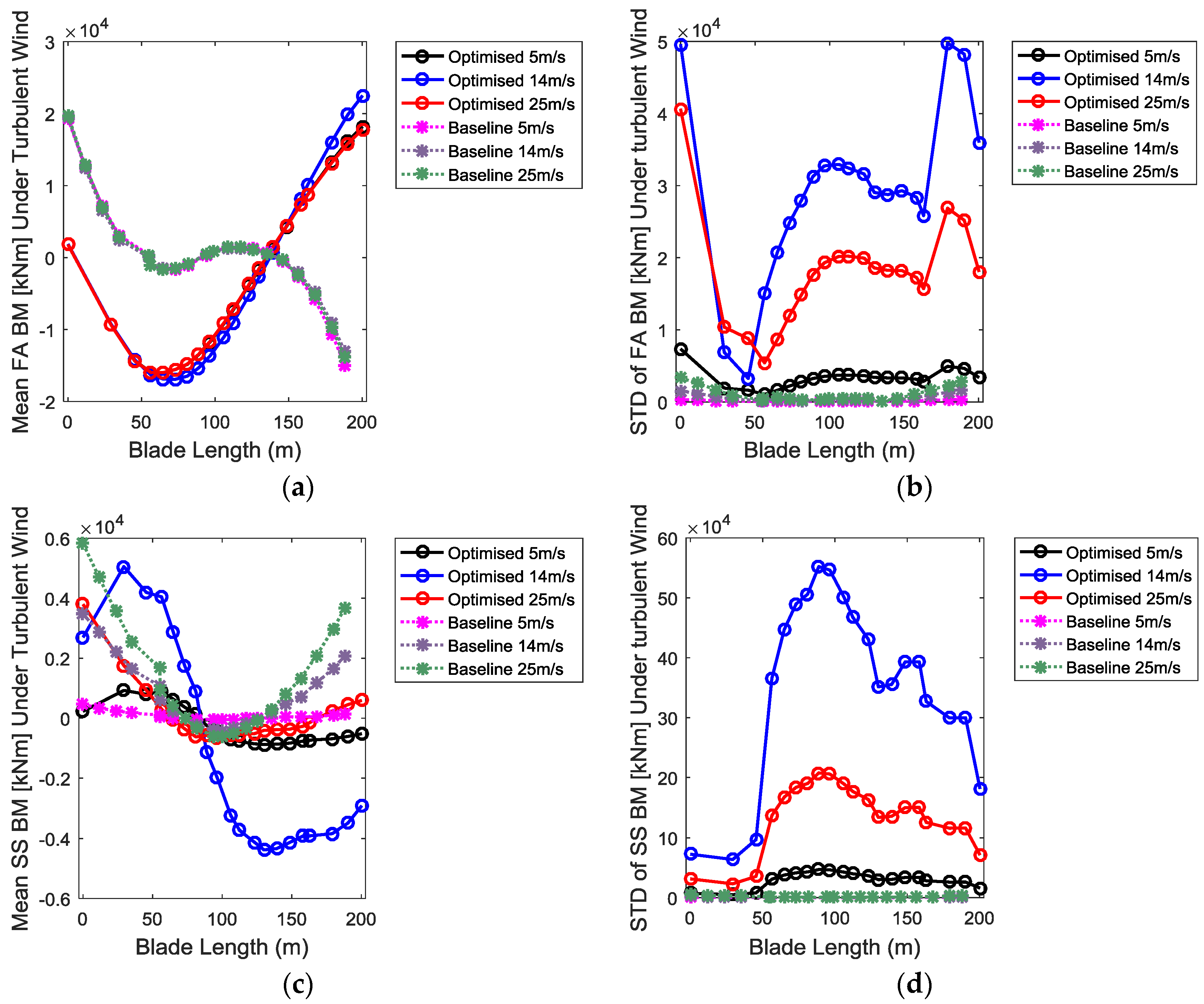
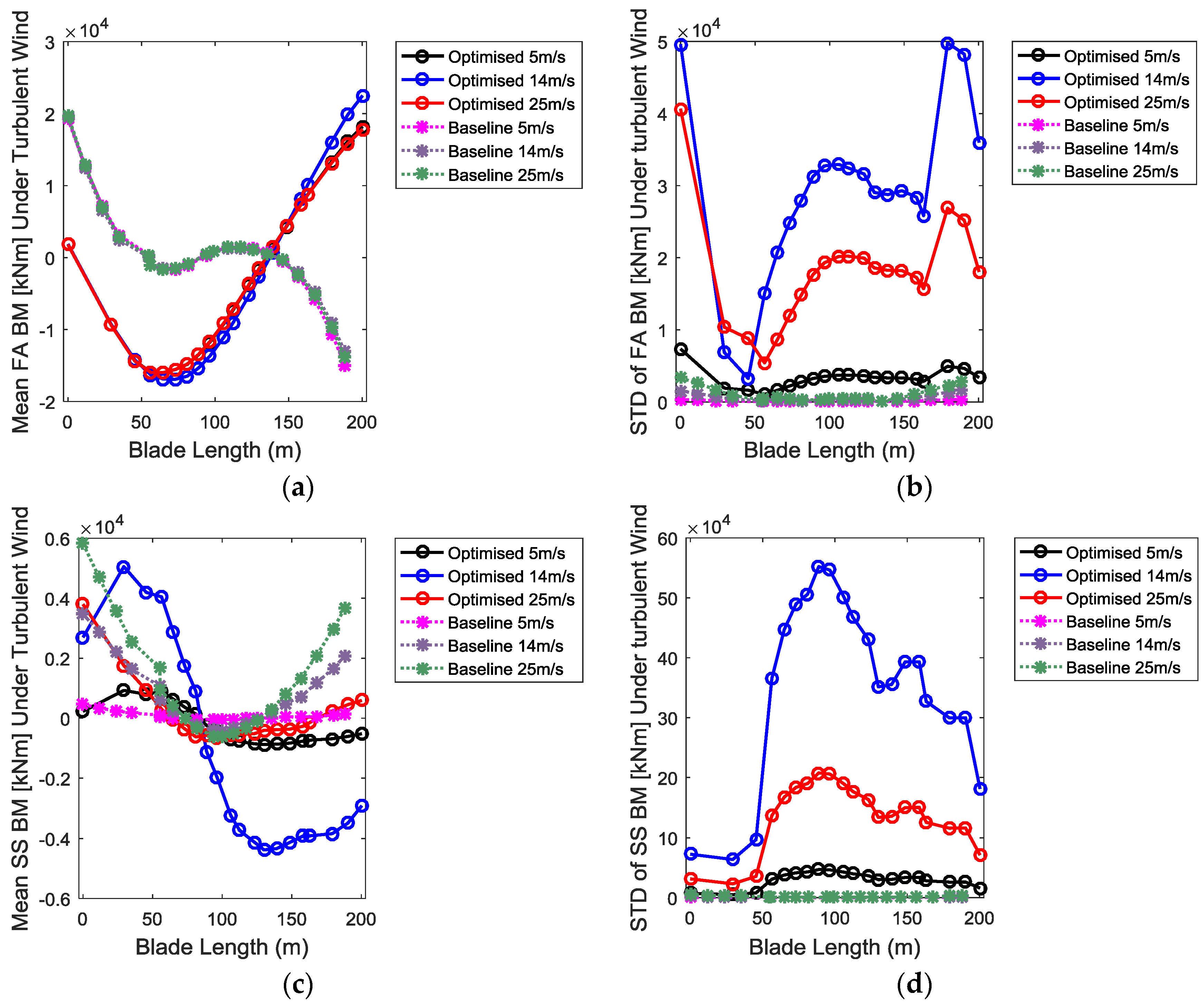
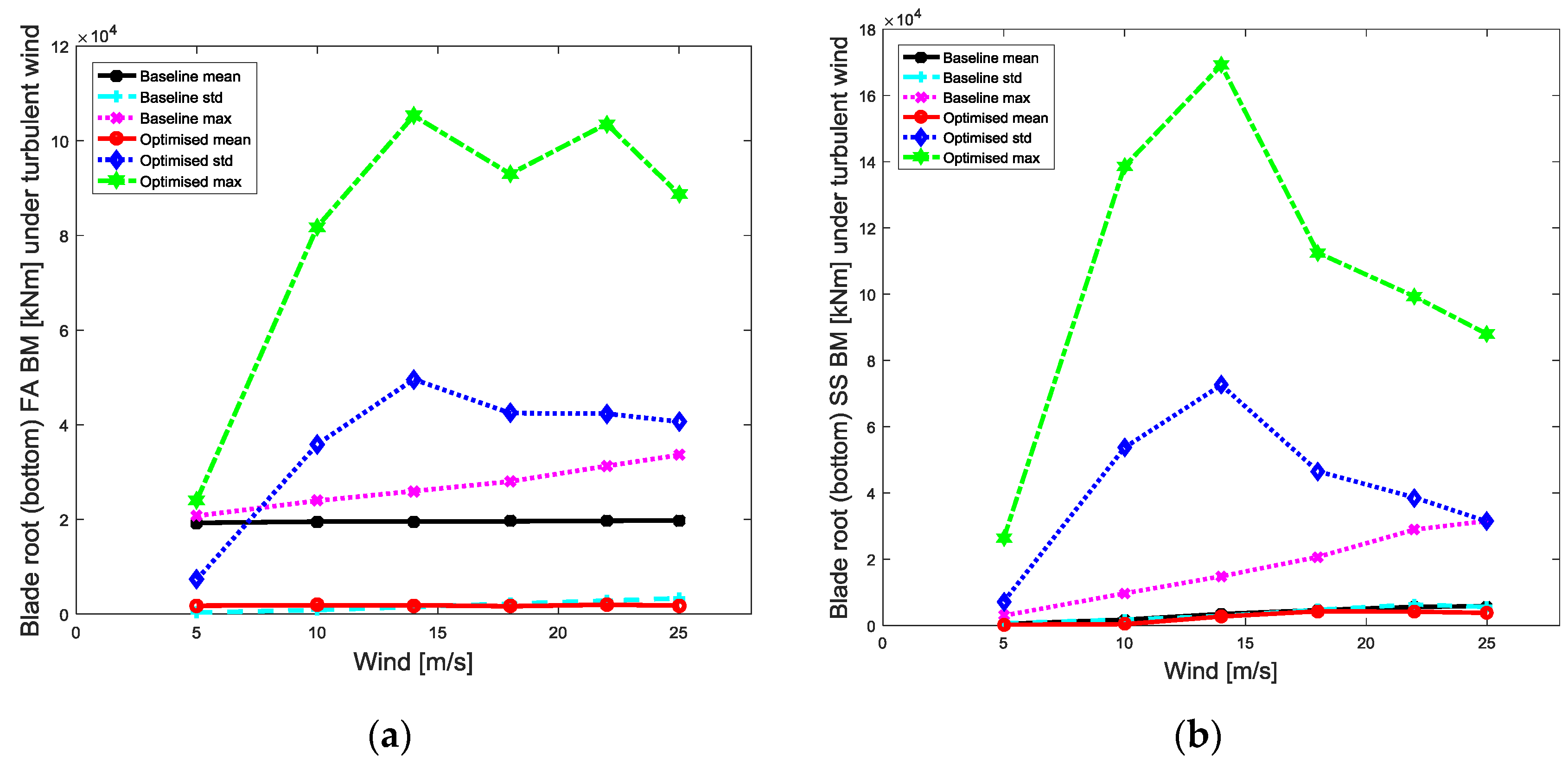
3.3.2. Comparing Blade Bending Moments Distribution
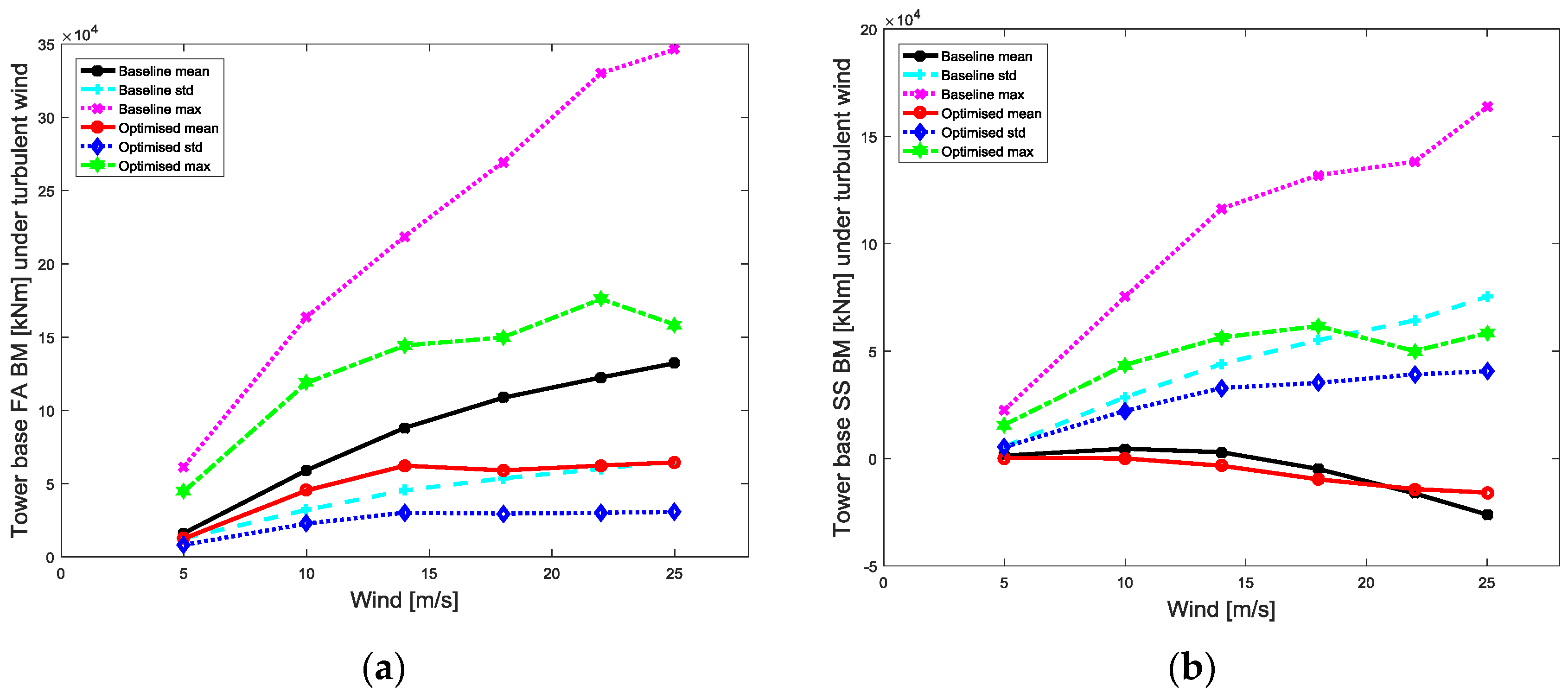
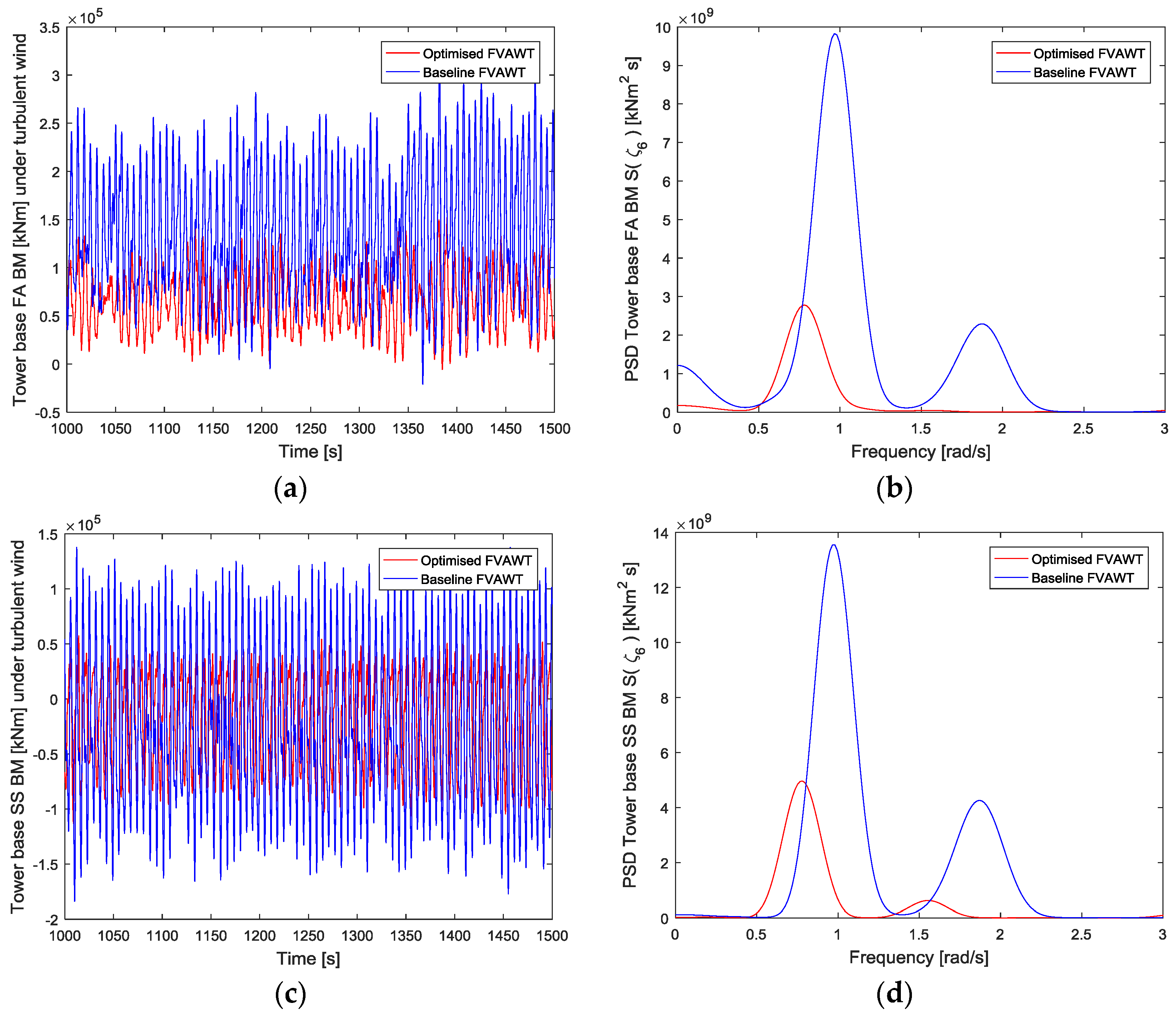
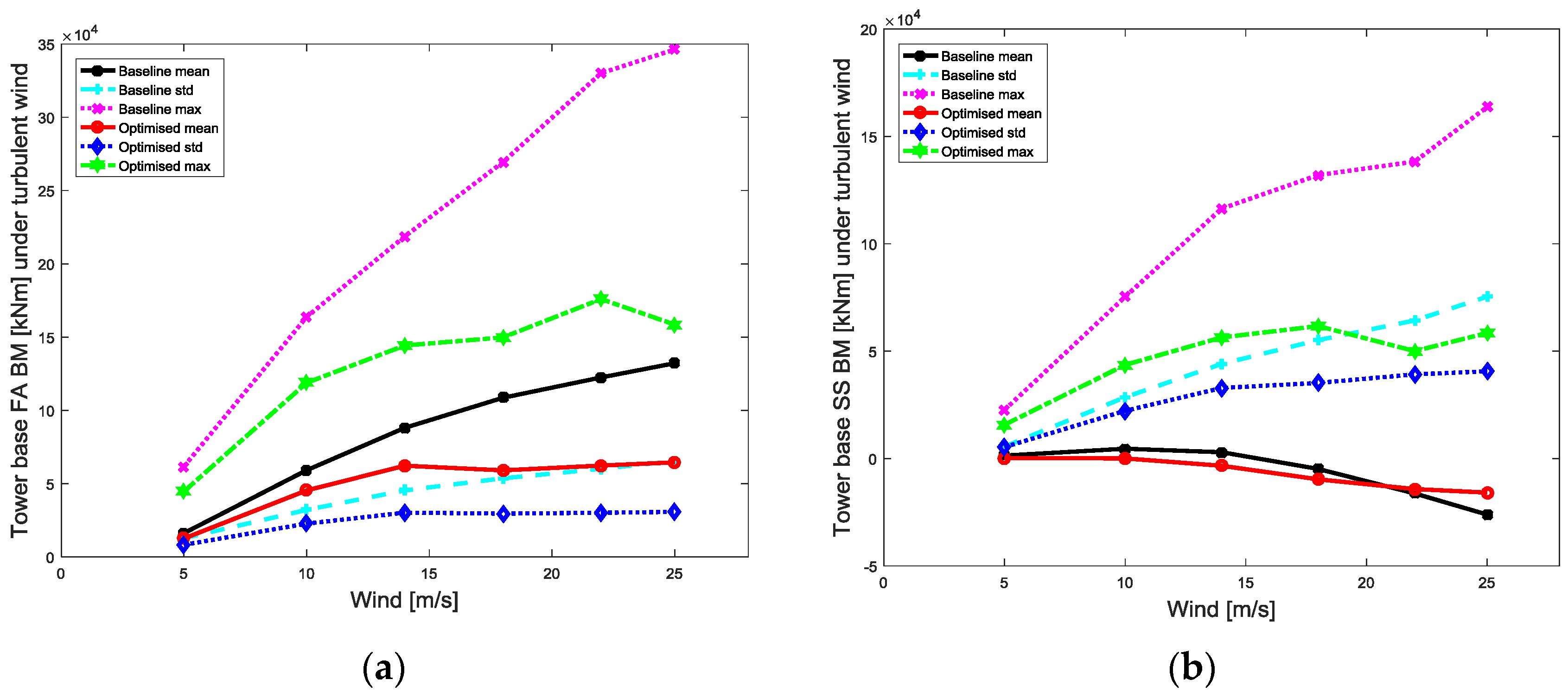
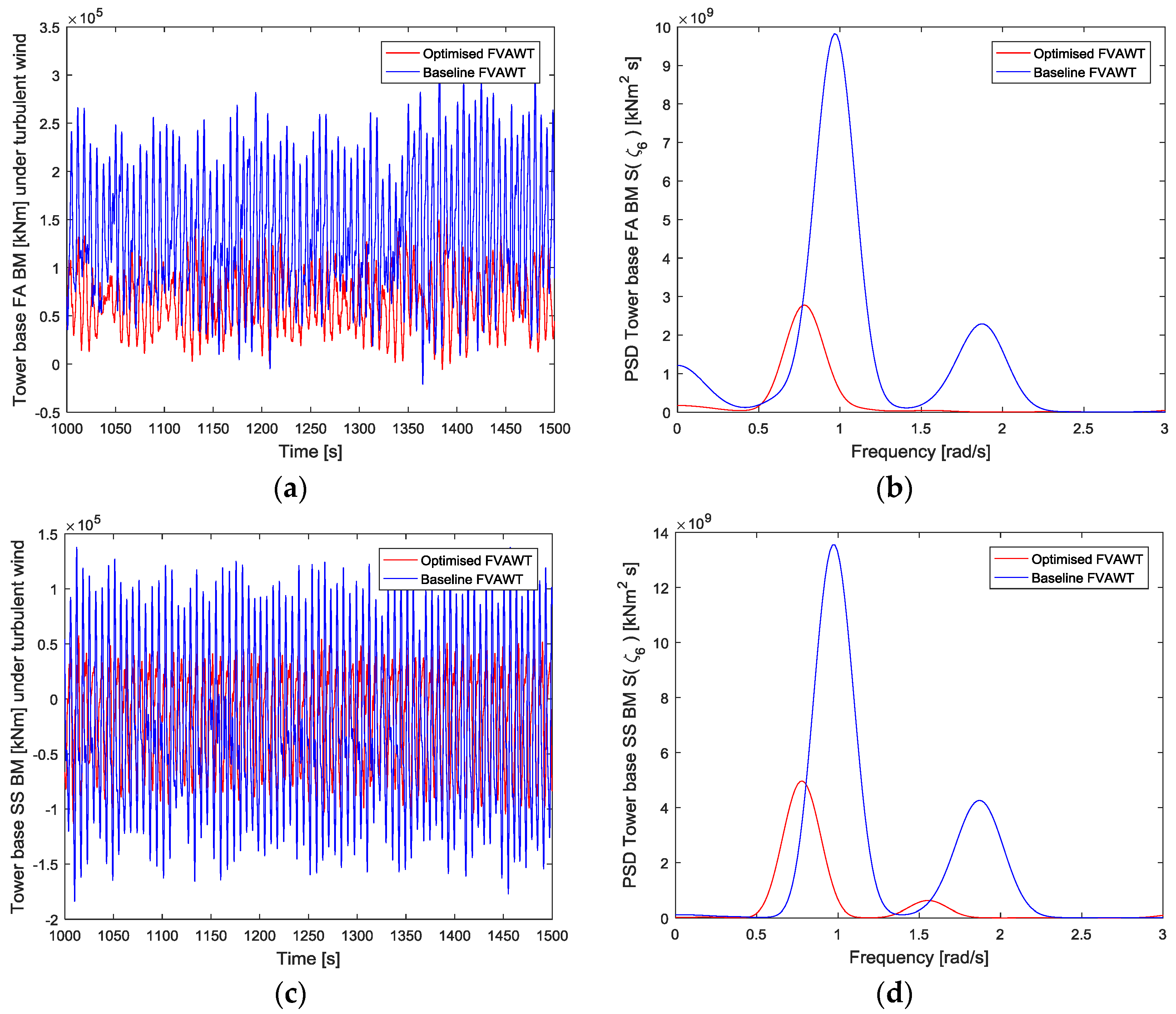
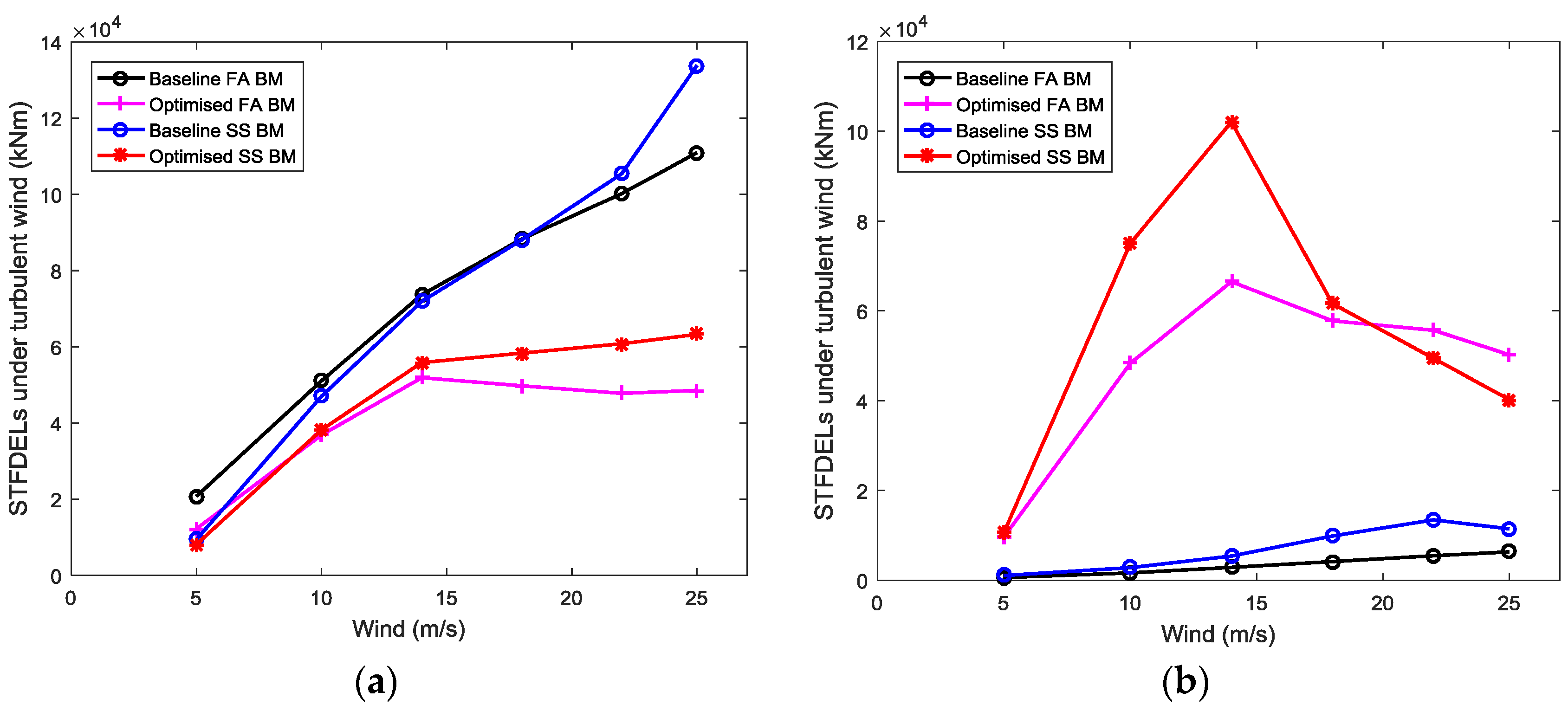
3.3.3. Comparing Tower Base Bending Moments
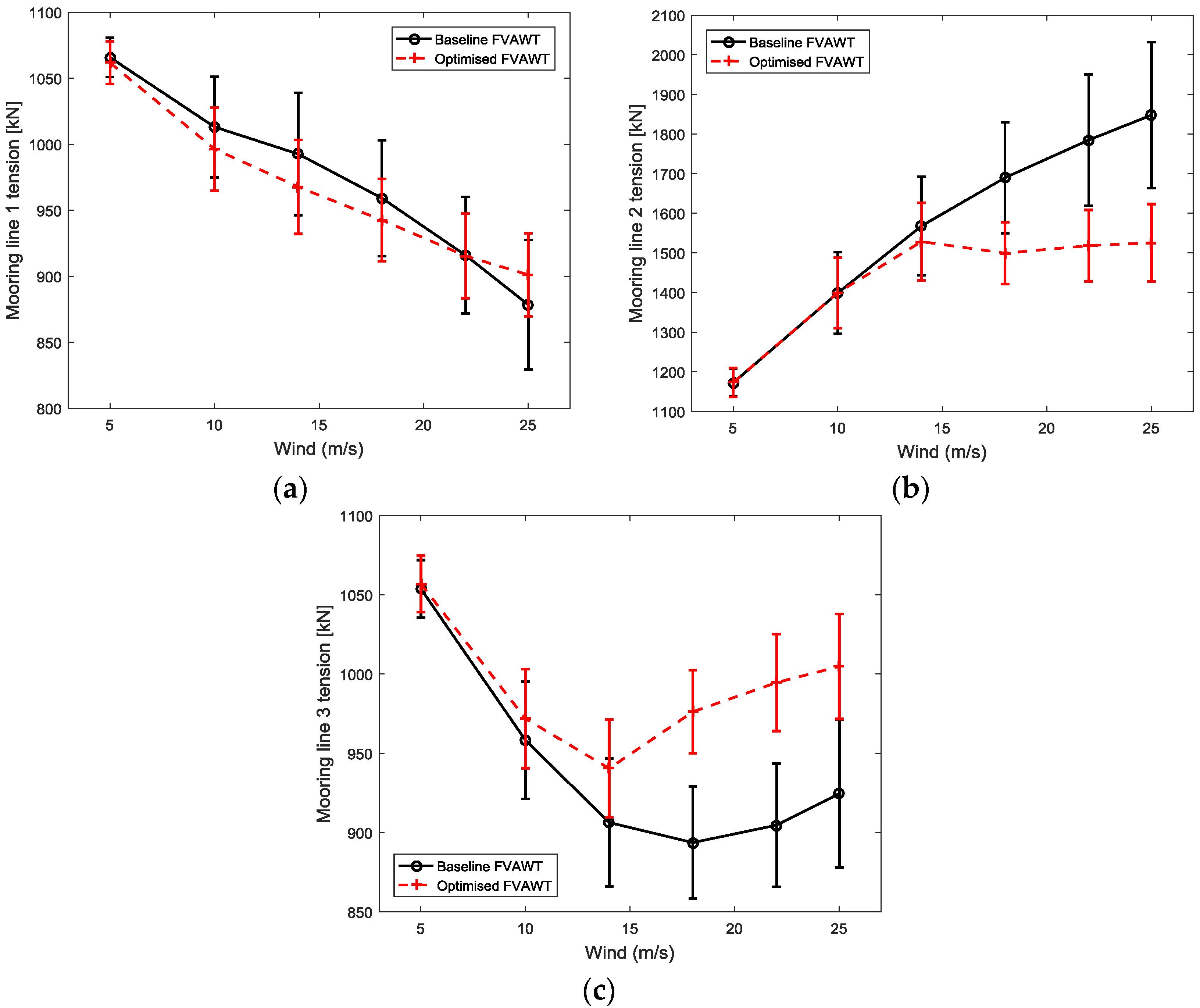
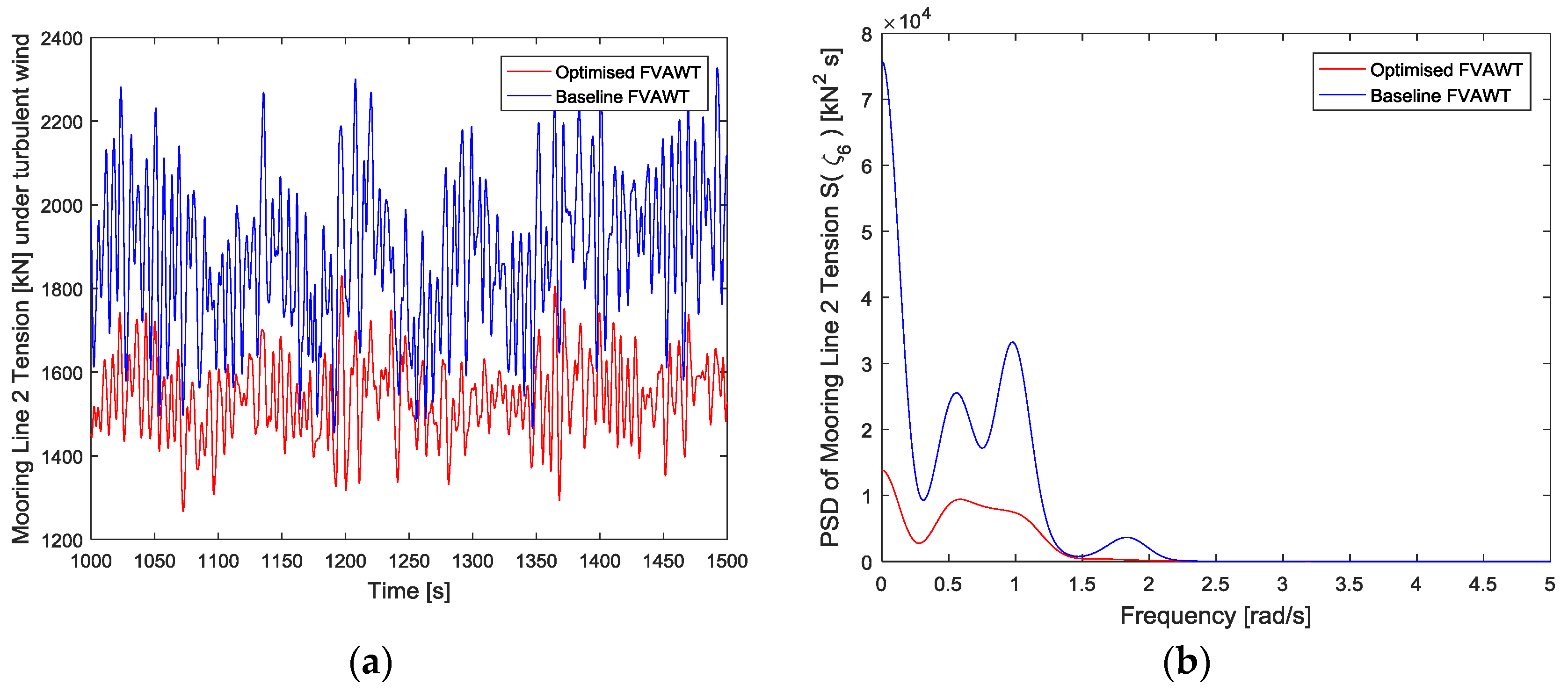
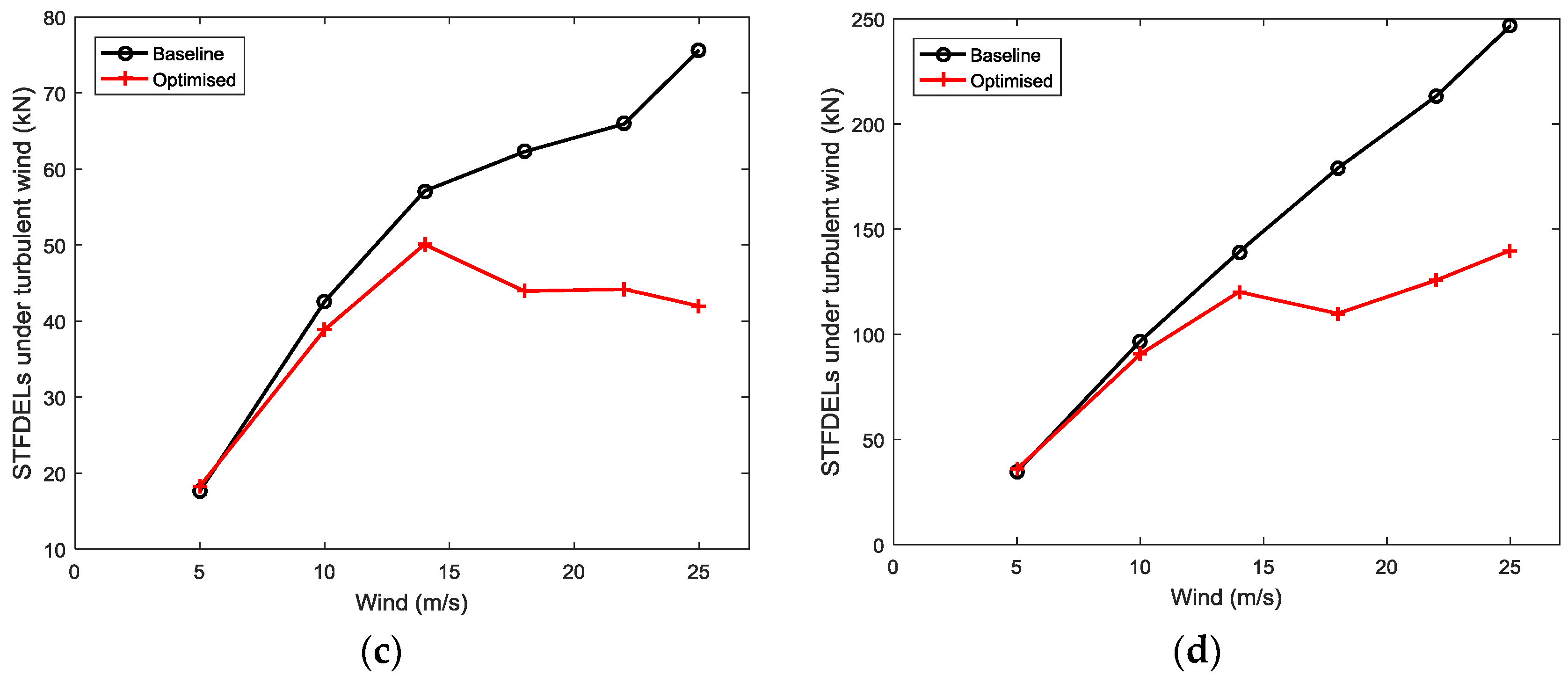
3.3.4. Comparing Mooring Lines Tension
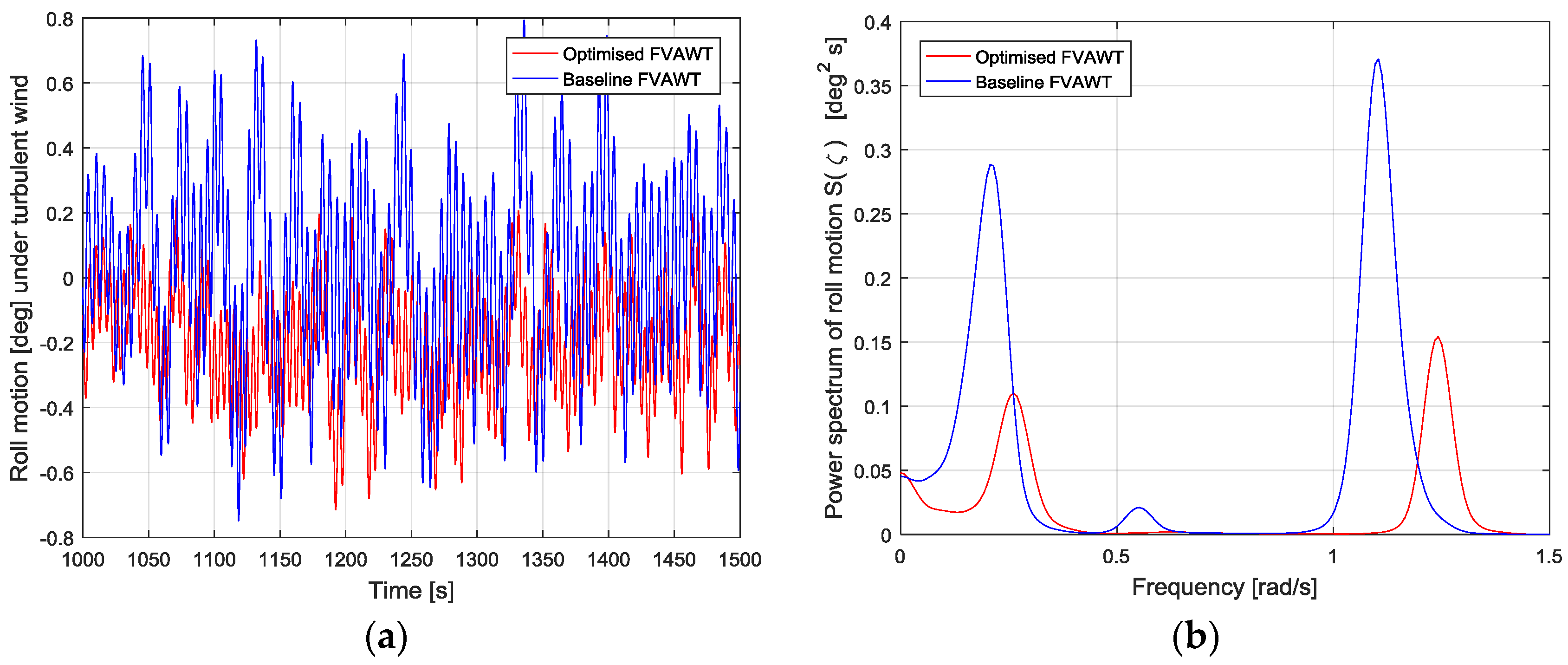
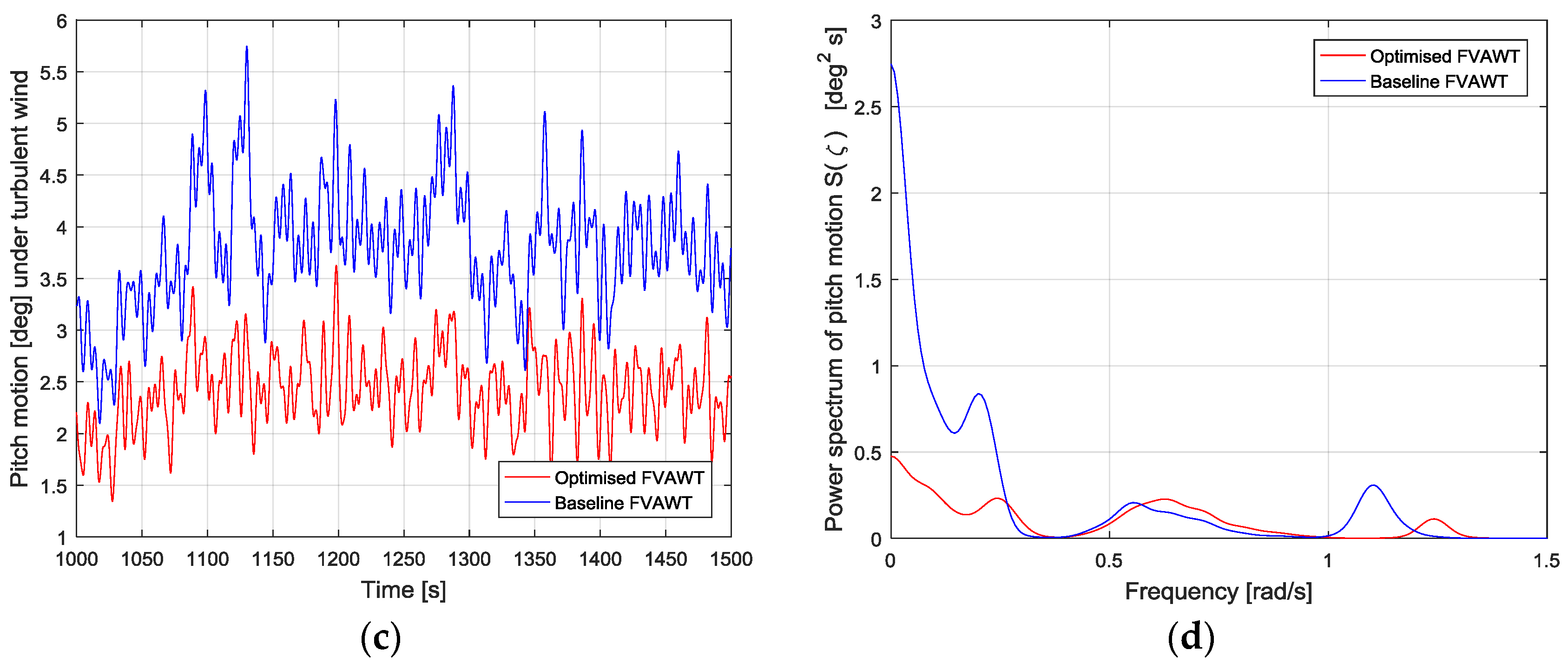
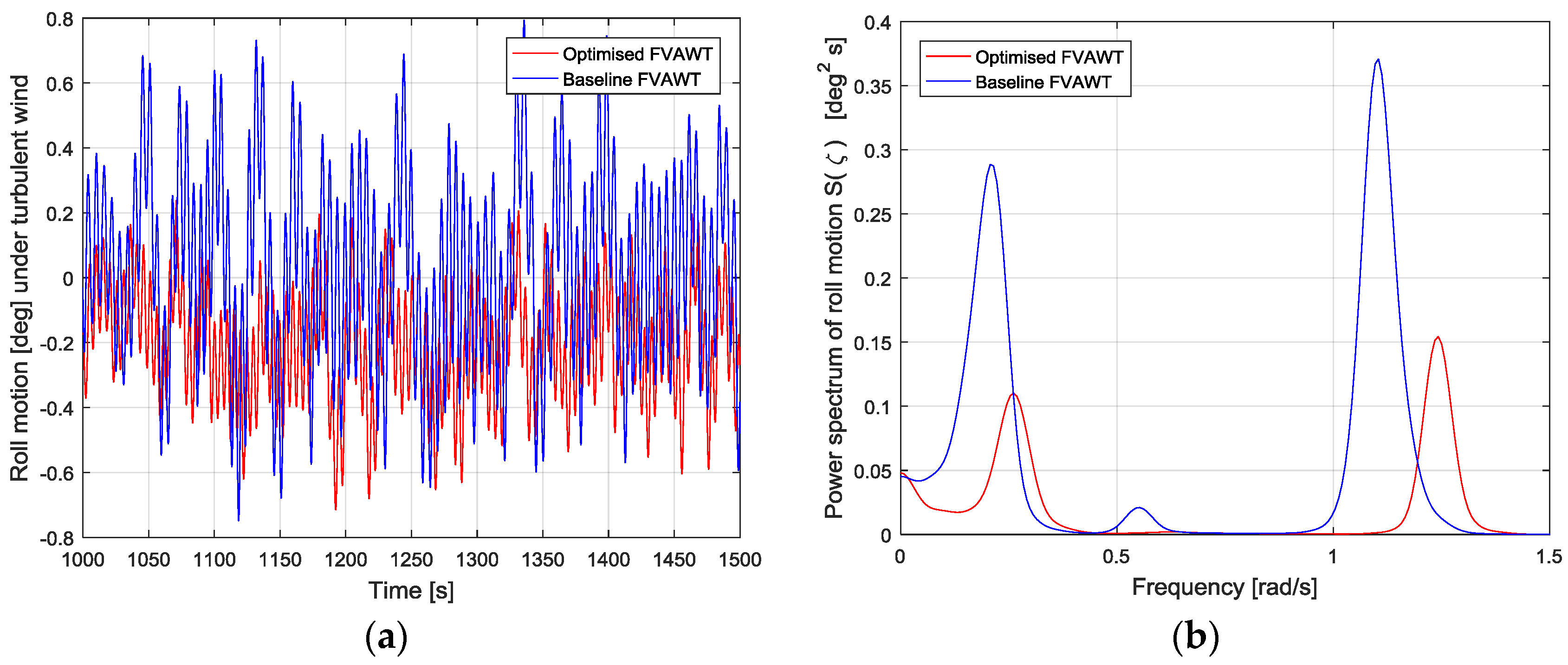
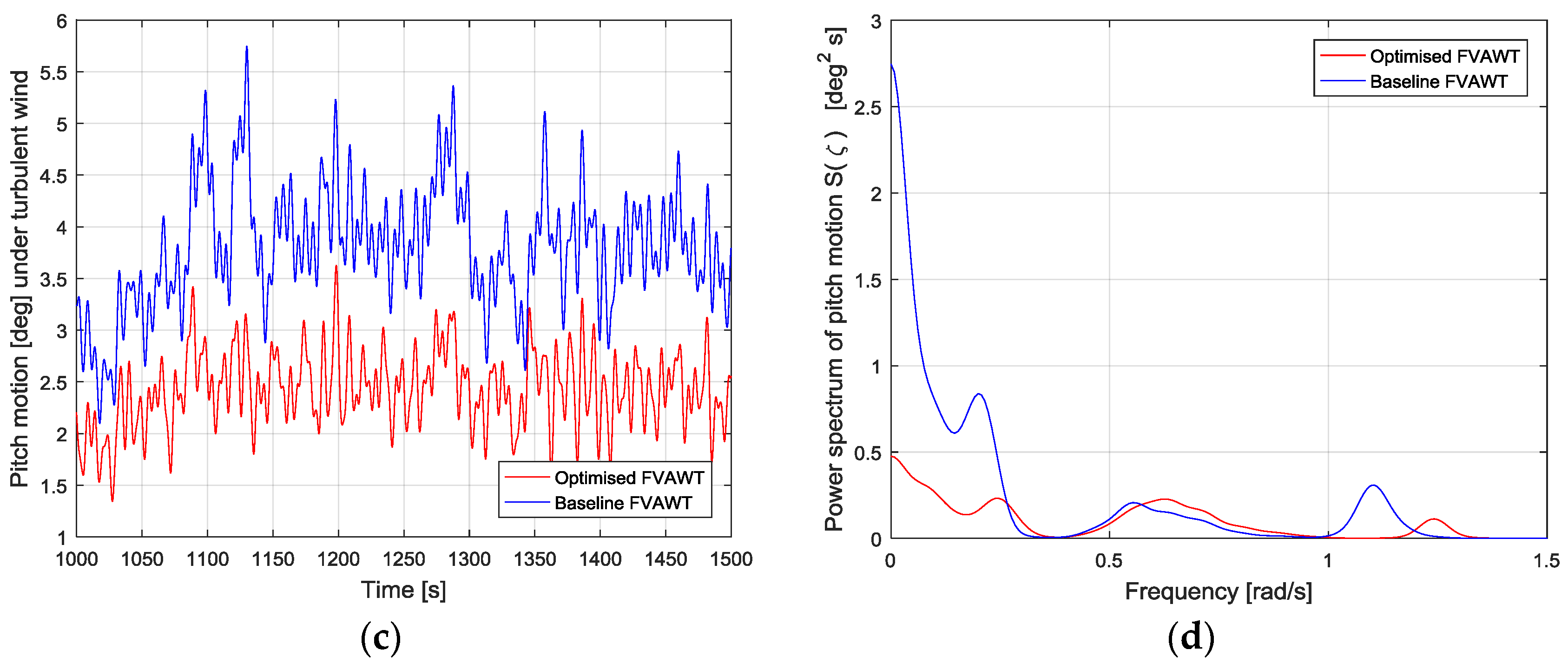
3.3.5. Comparing Platform Global Motion
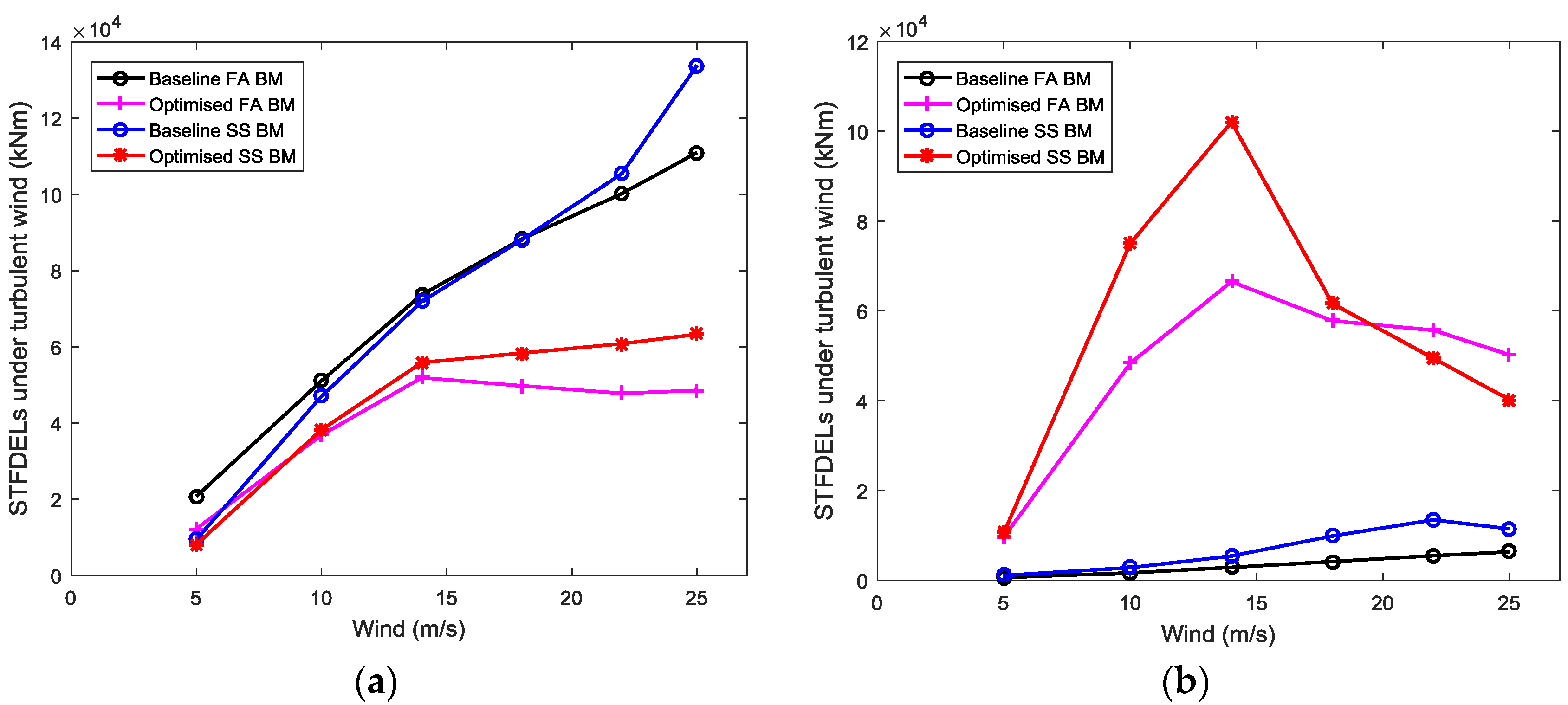
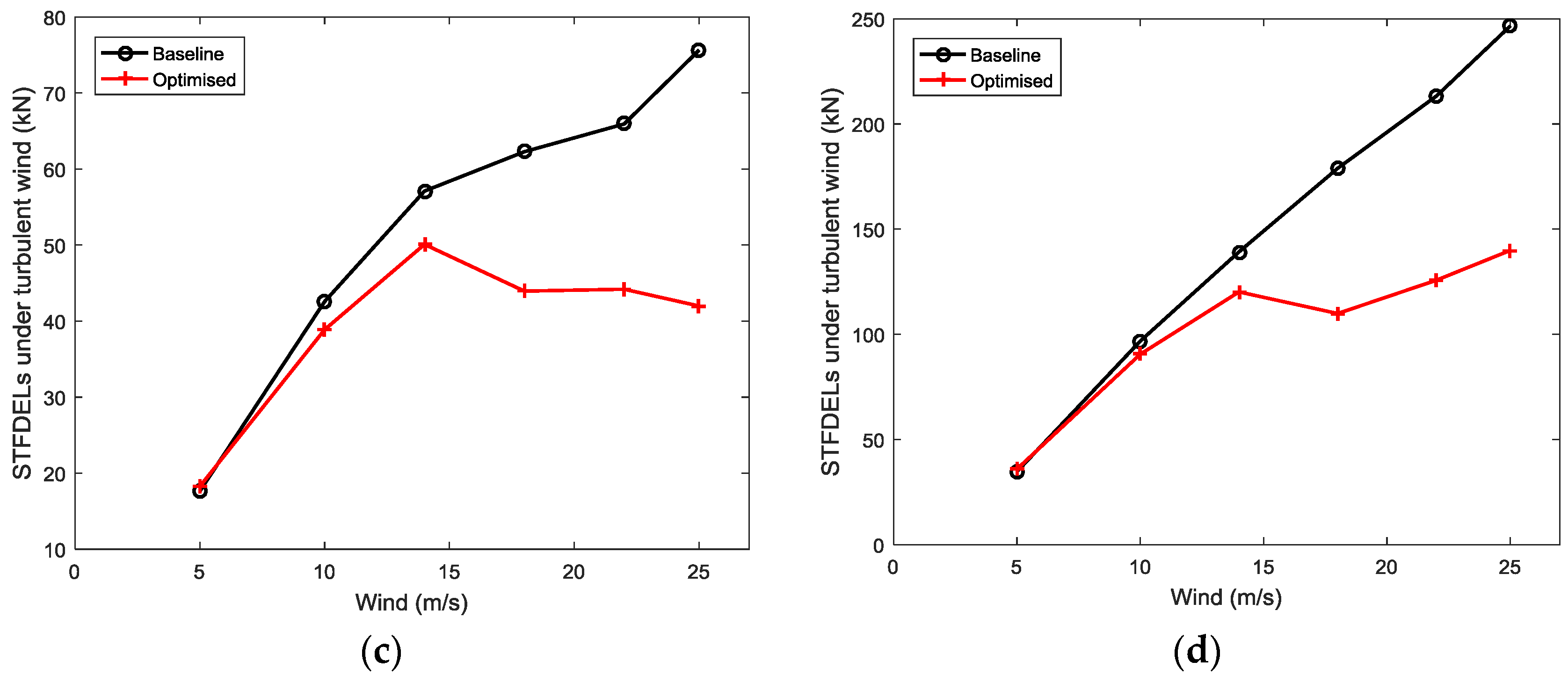
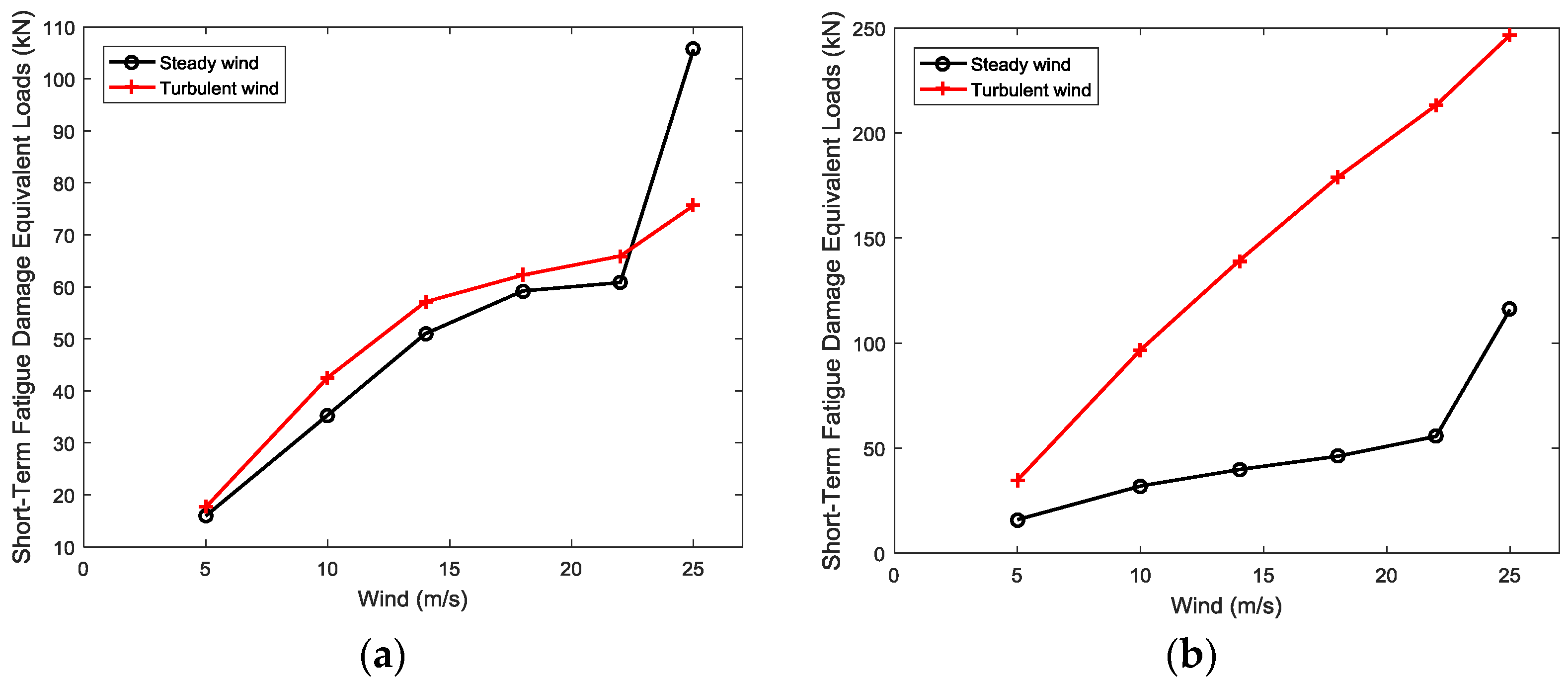
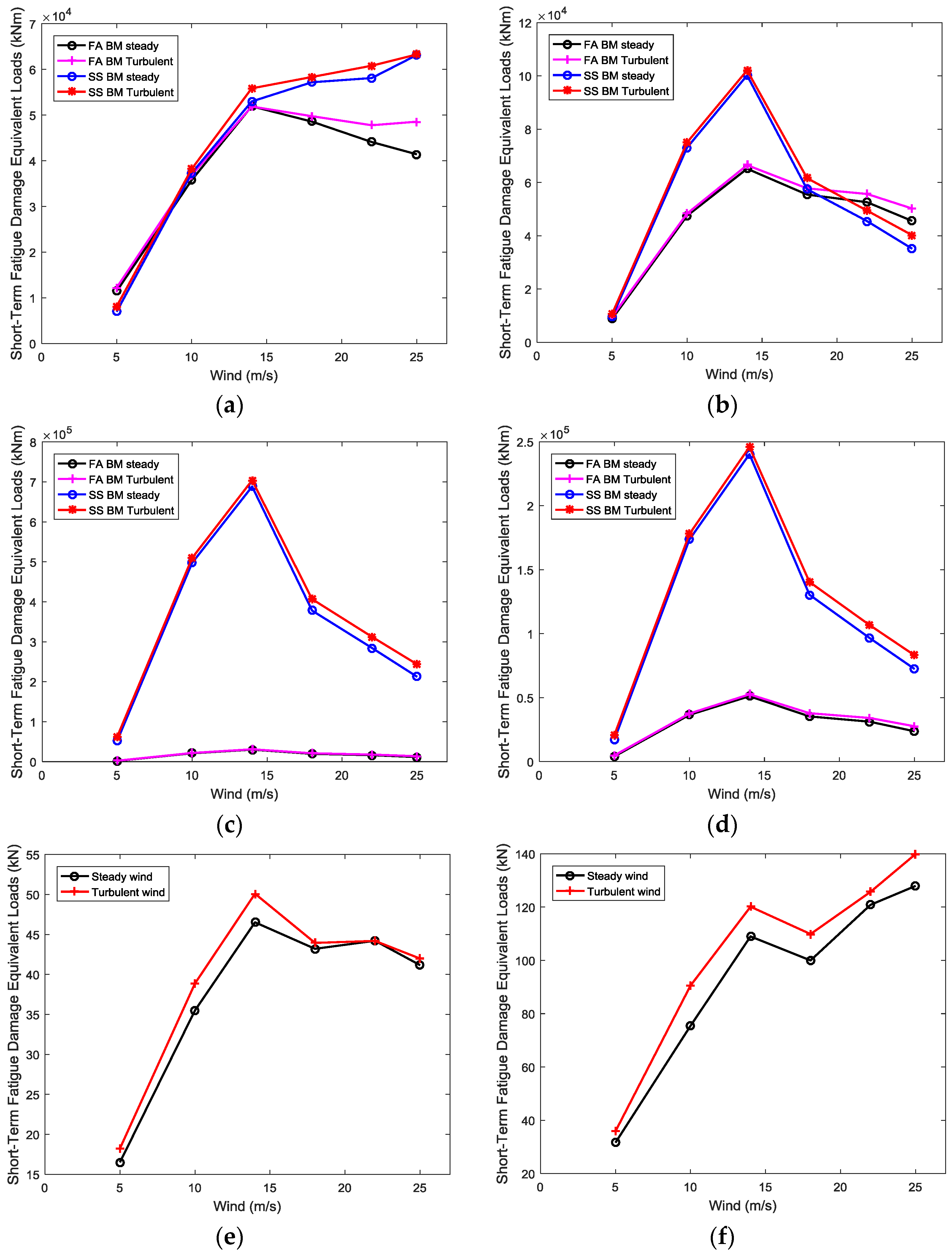
3.3.6. Comparing Short Term Fatigue Damage Equivalent Loads
4. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| FA BM | Fore-Aft bending moment (bending parallel to the wind direction) |
| SS BM | Side-side bending moment (along a direction at 90° to the wind direction) |
| STFDEL | Short-Term Fatigue Damage Equivalent Load |
| FA BM steady | STFDEL due to FA BM under steady wind condition |
| FA BM turbulent | STFDEL due to FA BM under turbulence wind condition |
| SS BM steady | STFDEL due to SS BM under steady wind condition |
| SS BM turbulent | STFDEL due to SS BM under turbulence wind condition |
| steady | STFDEL due to axial force or tension under steady wind condition |
| turbulent | STFDEL due to axial force or tension under turbulent wind condition |
| Optimized FA BM | STFDEL due to FA BM for the 5 MW optimized FVAWT |
| Baseline FA BM | STFDEL due to FA BM for the 5 MW baseline FVAWT |
| Optimized SS BM | STFDEL due to SS BM for the 5 MW optimized FVAWT |
| Baseline SS BM | STFDEL due to SS BM for the 5 MW baseline FVAWT |
| Optimized | STFDEL due to axial force for the 5 MW optimized FVAWT |
| Baseline | STFDEL due to axial force for the 5 MW baseline FVAWT |
References
- Paquette, J.; Barone, M.; Paquette, J.; Barone, M. Innovative offshore vertical-axis wind turbine rotor project. In Proceedings of the EWEA 2012 Annual Event, Copenhagen, Denmark, 16–19 April 2012.
- Wang, K.; Luan, C.; Moan, T.; Hansen, M.O.L. Comparative Study of a FVAWT and a FHAWT with a Semi-submersible Floater. In Proceedings of the Twenty-fourth International Offshore and Polar Engineering Conference, Busan, Korea, 15–20 June 2014.
- Anagnostopoulou, C.; Kagemoto, H.; Sao, K.; Mizuno, A. Concept design and dynamic analyses of a floating vertical-axis wind turbine: Case study of power supply to offshore Greek islands. Ocean Eng. Mar. Energy 2015, 2, 85–104. [Google Scholar] [CrossRef]
- Wang, K.; Moan, T.; Hansen, M.O.L. Stochastic dynamic response analysis of a floating vertical-axis wind turbine with a semi-submersible floater. Wind Energy 2016, 19, 1853–1870. [Google Scholar] [CrossRef]
- Jiang, Z.; Karimirad, M.; Moan, T. Dynamic response analysis of wind turbines under blade pitch system fault, grid loss, and shutdown events. Wind Energy 2014, 17, 1385–1409. [Google Scholar] [CrossRef]
- Karimirad, M.; Moan, T. Stochastic dynamic response analysis of a tension leg spar-type offshore wind turbine. Wind Energy 2013, 16, 953–973. [Google Scholar] [CrossRef]
- Kvittem, M.I.; Bachynski, E.E.; Moan, T. Effects of Hydrodynamic Modelling in Fully Coupled Simulations of a Semi-submersible Wind Turbine. Energy Procedia 2012, 24, 351–362. [Google Scholar] [CrossRef]
- Kvittem, M.I.; Moan, T. Effect of Mooring Line Modelling on Motions and Structural Fatigue Damage for a Semisubmersible Wind Turbine. In Proceedings of the Twenty-second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012.
- Kvittem, M.I.; Moan, T. Frequency versus time domain fatigue analysis of a semi-submersible wind turbine tower. In Proceedings of the ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014.
- Luan, C.; Gao, Z.; Moan, T. Modelling and analysis of a semi-submersible wind turbine with a central tower with emphasis on the brace system. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013.
- Karimirad, M.; Moan, T. Wave- and Wind-Induced Dynamic Response of a Spar-Type Offshore Wind Turbine. J. Waterw. Port Coast. Ocean Eng. 2012, 138, 9–20. [Google Scholar] [CrossRef] [Green Version]
- Bachynski, E.E.; Moan, T. Design considerations for tension leg platform wind turbines. Mar. Struct. 2012, 29, 89–114. [Google Scholar] [CrossRef]
- Paulsen, U.S.; Pedersen, T.F.; Madsen, H.A.; Enevoldsen, K.; Nielsen, P.H.; Hattel, J.; Zanne, L.; Battisti, L.; Brighenti, A.; Lacaze, M.; et al. Deepwind—An innovative wind turbine concept for offshore. In Proceedings of the European Wind Energy Association (EWEA) Annual Event, Brussels, Belgium, 14–17 March 2011.
- Vita, L.; Paulsen, U.S.; Pedersen, T.F. A novel floating offshore wind turbine concept: New developments. In Proceedings of the European Wind Energy Conference and Exhibition, Warsaw, Poland, 20–23 April 2010.
- Vita, L.; Paulsen, U.S.; Pedersen, T.F.; Madsen, H.A.; Rasmussen, F. A novel floating offshore wind turbine concept. In Proceedings of the European Wind Energy Conference and Exhibition, Marseille, France, 16–19 March 2009.
- Cahay, M.; Luquiau, E.; Smadja, C.; Silvert, F. Use of a Vertical Wind Turbine in an Offshore Floating Wind Farm. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2011.
- 10 MW Aerogenerator X. Available online: http://vimeo.com/13654447 (accessed on 7 December 2016).
- Paulsen, U.S.; Vita, L.; Madsen, H.A.; Hattel, J.; Ritchie, E.; Leban, K.M.; Berthelsen, P.A.; Carstensen, S. 1st DeepWind 5 MW Baseline Design. Energy Procedia 2012, 24, 27–35. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory: Golden, CO, USA, 2012.
- Skaare, B.; Hanson, T.D.; Nielsen, F.G.; Yttervik, R.; Hansen, A.M.; Thomsen, K.; Larsen, T. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the Euorpean Wind Energy Conference (EWEC), Milan, Italy, 7–10 May 2007.
- Larsen, T.J.; Hansen, A.M. How 2 Hawc2, the User’s Manual; Wind Energy Division; Technical University of Denmark (DTU): Lyngby, Denmark, 2014. [Google Scholar]
- Larsen, T.J.; Hanson, T.D. A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine. In Proceedings of the Conference on the Science of Making Torque from the Wind, Copenhagen, Denmark, 28–31 August 2007.
- Ormberg, H.; Bachynski, E.E. Global analysis of floating wind turbines: Code development, model sensitivity and benchmark study. In Proceedings of the 22nd International Ocean and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012.
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Laboratory: Golden, CO, USA, 2005.
- Borg, M.; Wang, K.; Collu, M.; Moan, T. A comparison of two coupled model of dynamics for offshore floating vertical axis wind turbines. In Proceedings of the ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014.
- Collu, M.; Borg, M.; Shires, A.; Brennan, F.P. FloVAWT: Progress on the development o a coupled model of dynamics for floating offhsore wind turbines. In Proceedings of the ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014.
- Wang, K.; Moan, T.; Hansen, M.O.L. A method for modeling of floating vertical axis wind turbine. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013.
- Paraschivoiu, I.; Delclaux, F. Double multiple streamtube model with recent improvements (for predicting aerodynamic loads and performance of Darrieus vertical axis wind turbines). J. Energy 1983, 7, 250–255. [Google Scholar] [CrossRef]
- Vita, L.; Pedersen, T.F.; Madsen, H.A. Offshore Vertical Axis Wind Turbine with Floating and Rotating Foundation; Technical University of Denmark (DTU): Lyngby, Denmark, 2011. [Google Scholar]
- Verelst, D.R.; Aagaard, M.H.; Kragh, K.A.; Belloni, F.; Verelst, D.R.; Aagaard, M.H.; Kragh, K.A.; Belloni, F. Detailed Load Analysis of the Baseline 5 MW DeepWind Concept; DTU Wind Energy: Roskilde, Denmark, 2014. [Google Scholar]
- Wang, K.; Hansen, M.O.L.; Moan, T. Dynamic Analysis of a Floating Vertical Axis Wind Turbine Under Emergency Shutdown Using Hydrodynamic Brake. Energy Procedia 2014, 53, 55–69. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Wang, K.; Gao, Z.; Moan, T. Dynamic Modelling and Analysis of Three Floating Wind Turbine Concepts with Vertical Axis Rotor. In Proceedings of the Twenty-Fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015.
- Wang, K.; Cheng, Z.; Moan, T.; Hansen, M.O.L. Effect of Difference-frequency Forces on the Dynamics of a Semi-submersible Type FVAWT in Misaligned Wave-wind Condition. In Proceedings of the Twenty-fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015.
- Wang, K. Modelling and Dynamic Analysis of a Semi-Submersible Floating Vertical Axis Wind Turbine. Ph.D. Thesis, Department of Marine Technology, Norwegian University of Science and Technology, Trondheim, Norway, 2015. [Google Scholar]
- Cheng, Z.; Wang, K.; Gao, Z.; Moan, T. Dynamic Response Analysis of Three Floating Wind Turbine Concepts with a Two-Bladed Darrieus Rotor. J. Ocean Wind Energy 2015, 2, 213–222. [Google Scholar] [CrossRef]
- Wang, K.; Hansen, M.O.L.; Moan, T. Model improvements for evaluating the effect of towertilting on the aerodynamics of a vertical axis wind turbine. Wind Energy 2015, 18, 91–110. [Google Scholar]
- Paulsen, U.S.; Madsen, H.A.; Hattel, J.H.; Baran, I.; Nielsen, P.H. Design optimization of a 5 MW floating offshore vertical axis wind turbine. In Proceedings of the DeepWind 2013—10th Deep Sea Offshore Wind R&D Conference, Trondheim, Norway, 24–25 January 2013.
- Karimirad, F.; Shirinzadeh, B.; Zhong, Y.; Smith, J.; Mozafari, M. Modelling a precision loadcell using neural networks for vision-based force measurement in cell micromanipulation. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics United States, Wollongong, Australia, 9–12 July 2013.
- Marit, K.I. Modelling and Response Analysis for Fatigue Design of a Semi-Submersible Wind Turbine; Marine Technology; Norwegian University of Science and Technology: Trondheim, Norway, 2014. [Google Scholar]
- Marintek. SIMO-User’s Manual Appendix A; Marintek: Trondheim, Norway, 2013. [Google Scholar]
- Wamit-Inc. Wamit User ManuaL; Wamit-Inc.: Chestnut Hill, MA, USA, 1998. [Google Scholar]
- Jonkman, B.J.; Kilcher, L. TurbSim User’s Guide: Version 1.06.00; National Renewable Energy Laboratory: Golden, CO, USA, 2012.
- Environmental Conditions and Environmental Loads; DNV-OS-C205, Offshore Standard; Det Norske Veritas-Germanischer Lloyd: Oslo, Norway, 2010.
- Hasselman, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of Wind-Wave Growth and Swell Decay During the Joint North Sea Wave Project (JONSWAP); No. 12, Report; Deutschen Hydro-graphischen Institut: Hamburg, Germany, 1973. [Google Scholar]
- Johannessen, K.; Meling, T.S.; Haver, S. Joint distribution for wind and waves in the northern north sea. In Proceedings of the Eleventh International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric and Undistributed Properties of the Blade | 5 MW Baseline FVAWT | 5 MW Optimized FVAWT | |
|---|---|---|---|
| Properties | Unit | Magnitude | Magnitude |
| Rotor radius | m | 63.74 | 60.48 |
| Rotor height | m | 129.56 | 143.00 |
| Blade chord | m | 7.45 | 5.00 |
| Airfoil type | NACA0018 | NACA0018 | |
| Solidity | 0.1653 | 0.1653 | |
| Length of one blade | m | 188.86 | 200.40 |
| Rotor mass | kg | 305044 | 96060 |
| Distance of hub height above the mean sea level | m | 79.78 | 86.50 |
| Operational and Performance Data | |||
| Rated Power | MW | 5.00 | 5.00 |
| Rated rotation speed | rpm | 5.26 | 5.95 |
| Number of blades | 2 | 2 | |
| Rated wind speed | m·s−1 | 14 | 14 |
| Cut in wind speed | m·s−1 | 4 | 4 |
| Cut out wind speed | m·s−1 | 25 | 25 |
| Floater Properties | |||
| Depth of platform base below sea level (total draft) | m | 20.00 | 20.00 |
| Spacing between offset columns | m | 50.00 | 50.00 |
| Platform mass, including ballast and generator | kg | 1.3354 × 107 | 1.3614 × 107 |
| Total mass of ballast water | kg | 9.4115 × 106 | 9.6720 × 106 |
| CM location of total concept below SWL | m | 8.66 | 10.72 |
| Buoyancy in undisplaced position | kg | 1.4267 × 107 | 1.4267 × 107 |
| CB location below SWL | m | 13.15 | 13.15 |
| Hydrostatic restoring stiffness in heave C33 | N·m−1 | 3.8360 × 106 | 3.8360 × 106 |
| Hydrostatic restoring stiffness in roll C44 | N·m·rad−1 | −3.77 × 108 | −3.78 × 108 |
| Hydrostatic restoring stiffness in pitch C55 | N·m·rad−1 | −3.77 × 108 | −3.78 × 108 |
| Moment of inertia in roll | kg·m2 | 9.1597 × 109 | 9.3276 × 109 |
| Moment of inertia in pitch | kg·m2 | 9.1597 × 109 | 9.3276 × 109 |
| Moment of inertia in yaw | kg·m2 | 1.2087 × 1010 | 1.2319 × 1010 |
| Mode | Description | Riflex | Abaqus | Relative Error |
|---|---|---|---|---|
| 1 | 1st tower SS | 0.2043 | 0.2074 | 1.457% |
| 2 | 1st tower FA | 0.2195 | 0.2231 | 1.645% |
| 3 | 1st blade collective flatwise | 0.2683 | 0.2698 | 0.556% |
| 4 | 1st blade asymmetric flatwise | 0.2694 | 0.2719 | 0.910% |
| 5 | 1st blade twist | 0.3516 | 0.3420 | 2.821% |
| 6 | 1st blade butterfly (Edgewise) | 0.4276 | 0.4214 | 1.457% |
| 7 | 2nd blade asymmetric flatwise | 0.4940 | 0.4912 | 0.556% |
| 8 | 2nd blade collective flatwise | 0.4986 | 0.4979 | 0.139% |
| 9 | 1st blade asymmetric flatwise | 0.7641 | 0.7654 | 0.172% |
| 10 | 3rd blade collective flatwise | 0.7724 | 0.7721 | 0.037% |
| DLC | Uw (m/s) | Hs (m) | Tp (s) | Turbulent Model |
|---|---|---|---|---|
| 1 | 5 | 2.10 | 9.74 | NTM |
| 2 | 10 | 2.88 | 9.98 | NTM |
| 3 | 14 | 3.62 | 10.29 | NTM |
| 4 | 18 | 4.44 | 10.66 | NTM |
| 5 | 22 | 5.32 | 11.06 | NTM |
| 6 | 25 | 6.02 | 11.38 | NTM |
| Nodal Points | Coordinates (Y, Z) | Length Segment (m) | Description |
|---|---|---|---|
| 1 | (0.00, 0.00) | - | Tower base |
| 2 | (0.10, 15.074) | 0 | Blade root (bottom) |
| 3 | (62.80, 87.35) | 99.50 | Blade center |
| 4 | (0.00, 144.56) | 188.17 | Blade root (top) |
| 5 | Mooring line 1 | ||
| 6 | Mooring line 2 | ||
| Nodal Points | Coordinates (Y, Z) | Length Segment (m) | Description |
|---|---|---|---|
| 1 | (0.00, 0.00) | - | Tower base |
| 2 | (0.10, 15.074) | 0 | Blade root (bottom) |
| 3 | (54.80, 93.17) | 112.35 | Blade center |
| 4 | (0.00, 158.00) | 200.31 | Blade root (top) |
| 5 | Mooring line 1 | ||
| 6 | Mooring line 2 | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishie, J.; Wang, K.; Ong, M.C. Structural Dynamic Analysis of Semi-Submersible Floating Vertical Axis Wind Turbines. Energies 2016, 9, 1047. https://doi.org/10.3390/en9121047
Ishie J, Wang K, Ong MC. Structural Dynamic Analysis of Semi-Submersible Floating Vertical Axis Wind Turbines. Energies. 2016; 9(12):1047. https://doi.org/10.3390/en9121047
Chicago/Turabian StyleIshie, Jeremiah, Kai Wang, and Muk Chen Ong. 2016. "Structural Dynamic Analysis of Semi-Submersible Floating Vertical Axis Wind Turbines" Energies 9, no. 12: 1047. https://doi.org/10.3390/en9121047
APA StyleIshie, J., Wang, K., & Ong, M. C. (2016). Structural Dynamic Analysis of Semi-Submersible Floating Vertical Axis Wind Turbines. Energies, 9(12), 1047. https://doi.org/10.3390/en9121047