4.1. Evaluation Framework Setup
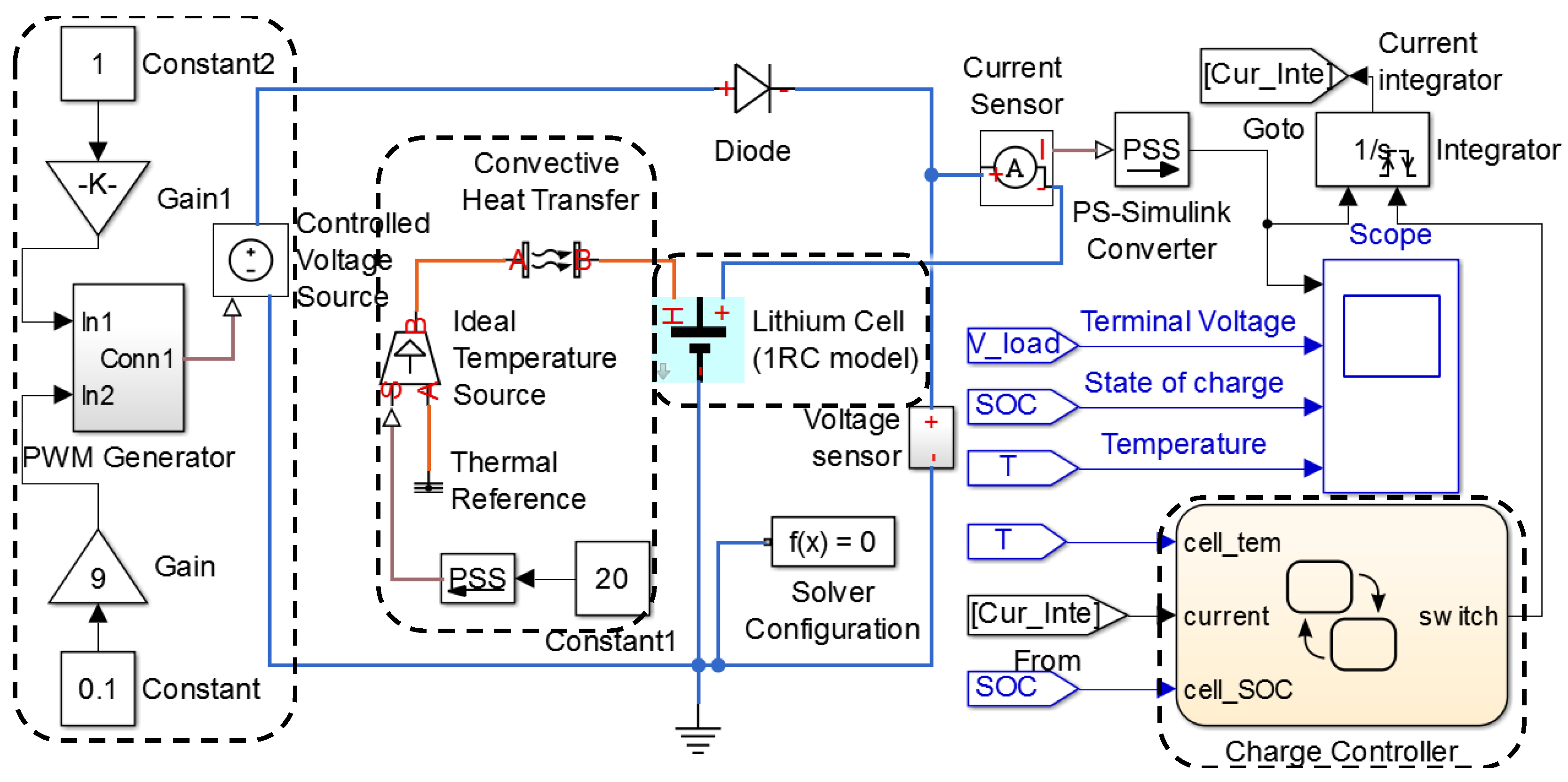
The evaluation framework is implemented using the MATLAB/Simulink environment to design the proposed battery charger system, including the proposed search algorithm of the pulse frequency and the duty cycle, which is shown in
Figure 14. The physical model of the battery cells is developed using the Simscape
TM package, which requires a solver reconfiguration.
The dotted box on the left in
Figure 14 indicates variable declaration for the controlled frequency and duty cycle value. The controlled voltage source block is selected from Simscape
TM to model pulse voltage for the charge process of the battery pack. Duty cycle and frequency, as the two input signals, can be adjusted by changing the gain coefficient of the gain blocks.
The convective heat transfer block offers a way to exchange the convective heat effect between the battery and the ambient environment. The second dotted box from the left shows that ambient temperature is set at 20 C, which can be adjusted as an input variable.
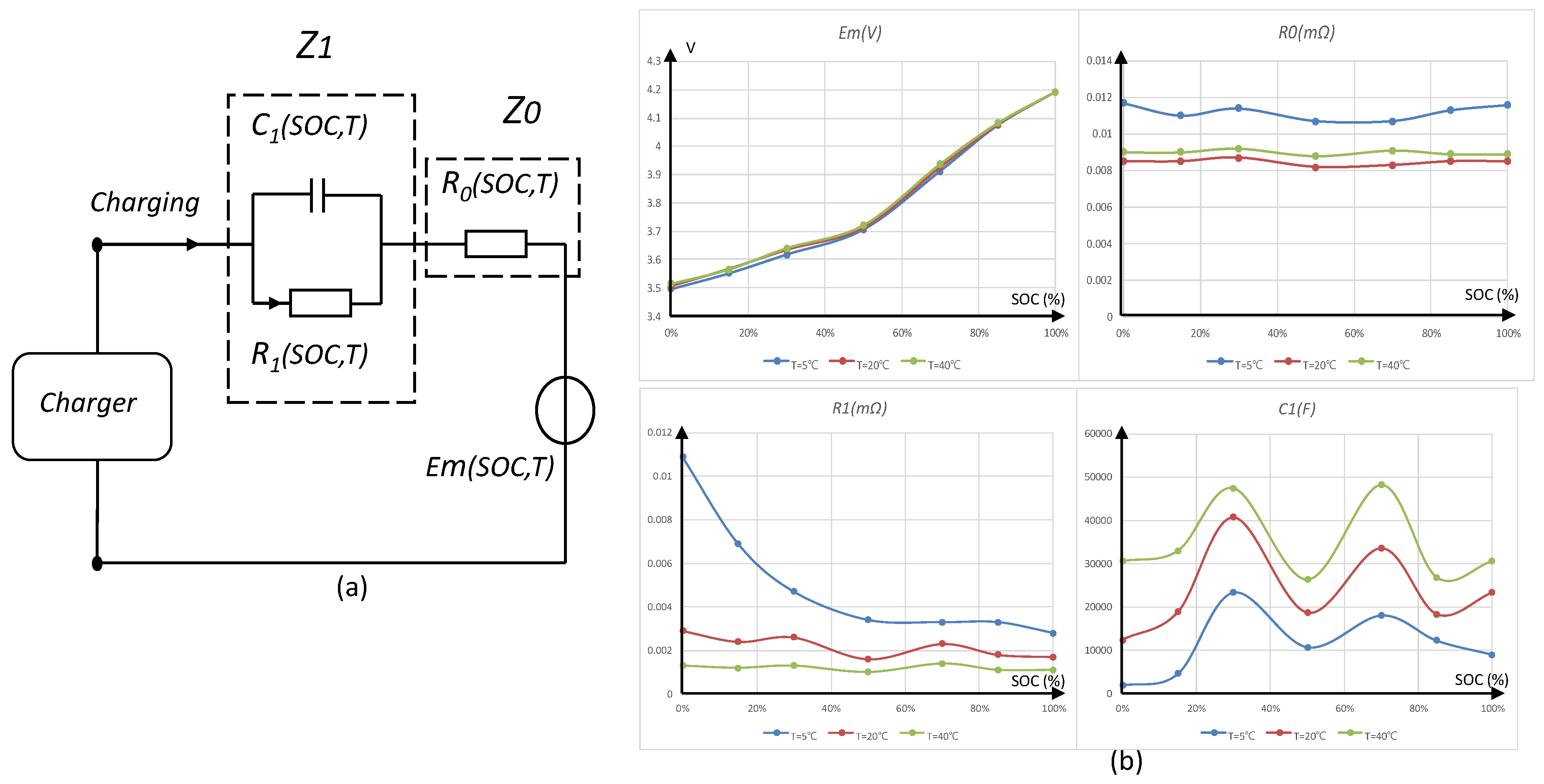
The third dashed line from the left shows the high-fidelity battery model provided by SimscapeTM. As a high-fidelity model design, we also consider SOC and the thermal effect on the modeled component. Each component of the equivalent circuit model will change with the SOC and temperature of the battery during the battery charging process. The amount of heat, which is generated on and as an output of the thermal model, is connected by convective heat transfer.
We designed a charge controller, described by a dashed line on the right. The charge controller decides whether to stop charging based on two input signals: the SOC and the temperature of the battery. The signal is an accumulated value provided by the integrator block at the upper right corner to calculate the average current within seconds, so as to obtain the optimal frequency and duty cycle. The charge controller resets the integrator block with the signal every 5 s based on the design requirements.
Through observation and analysis of battery state parameters, such as charging current, terminal voltage, SOC, and temperature, we achieved the most efficient frequency and duty cycle for a fast pulse-based charging method. The charging time and temperature rise are due to two important parameters in the charging algorithm. The rise in temperature indicates heating in the internal resistance of the battery cells during the charge process.
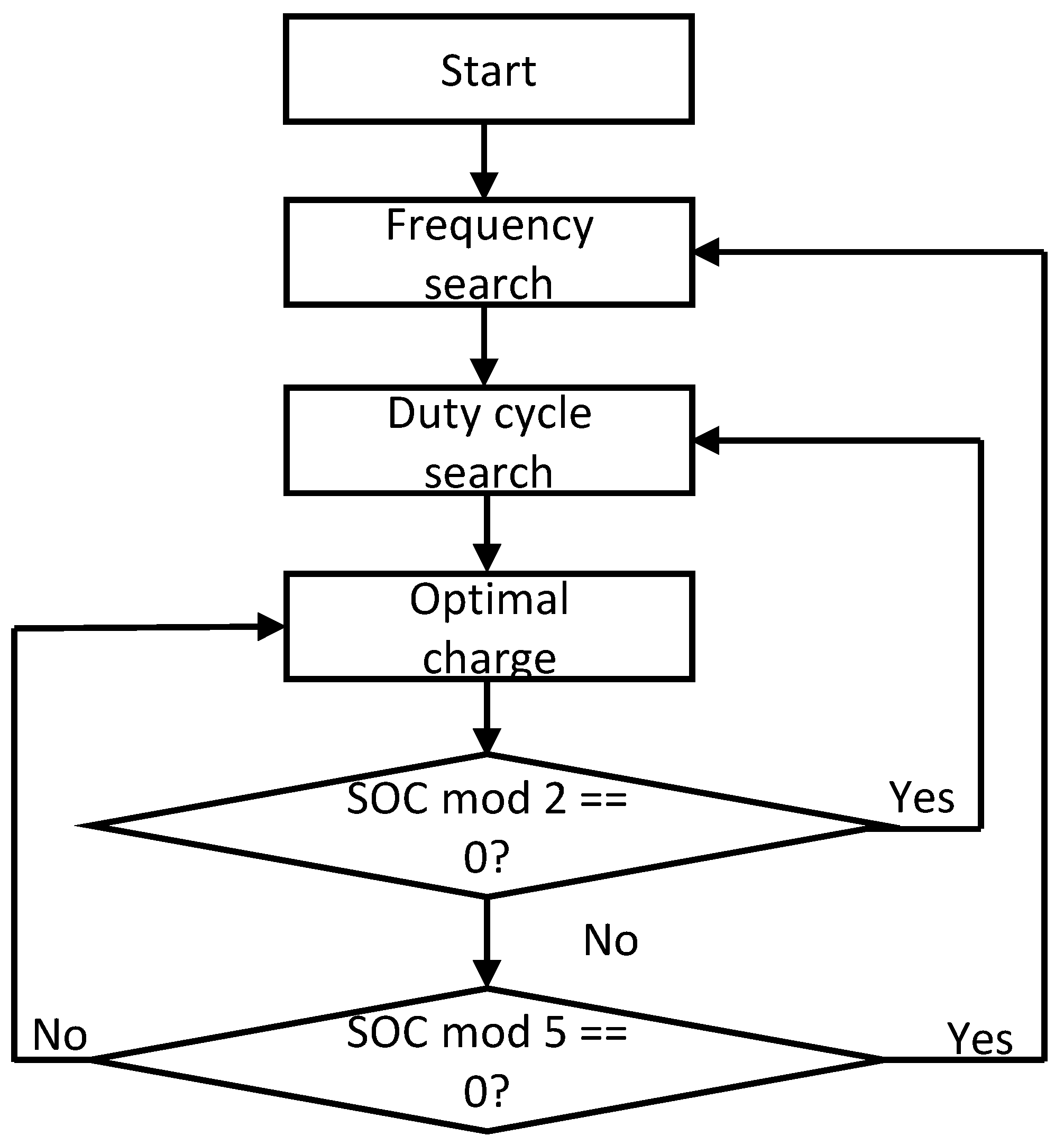
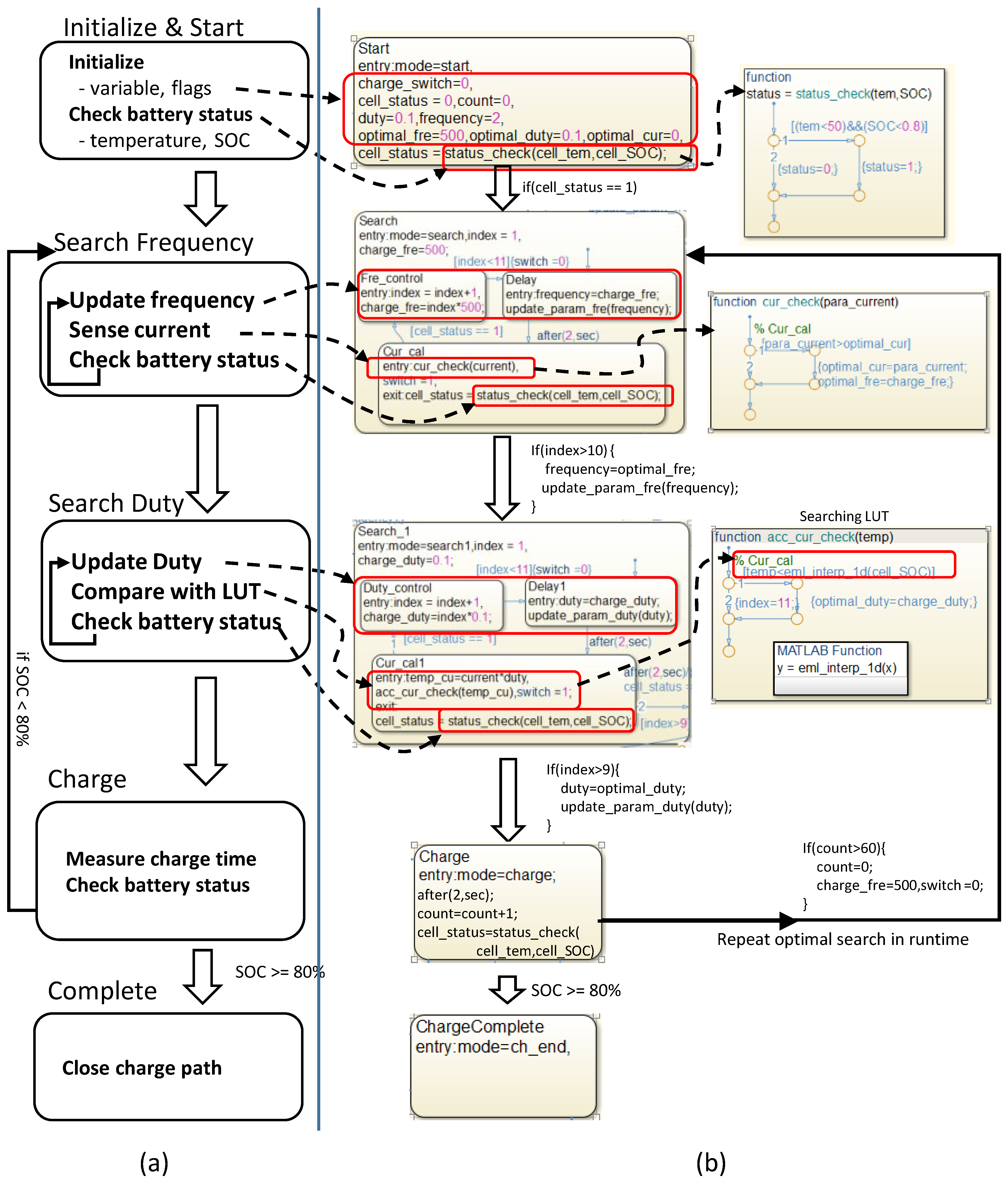
The implemented state flow of the proposed charger system is shown in
Figure 15. We proposed five states, including the
,
,
,
and
states. The start state is a default state that initializes all the parameters and checks the battery status. The charger has to verify that the temperature and SOC of the battery are under the respective thresholds of 45
C and 0.8 by using the function of
at the lower left corner. Throughout the charge process, the battery status is checked at regular intervals.
The optimal frequency is obtained in the state by calling the function. In the state, the duty cycle is adjusted to ensure that the charging current abides by the polarization curve. Through the LUT, we can check the polarization curve by calling the function. We adopt the efficient pulse in the Charge state for two minutes, then cycle back to the Search state once again. Eventually, entering the Charge Complete state means that the charger process has ended.
The user-defined functions
and
in the MATLAB/Simulink models are shown at the top left corner. In the function,
and
are used to get and change the gain coefficient of the gain blocks shown in
Figure 14 during the emulation.
The BMS IC is attached to the board to measure the temperature, current flow, and voltage level of the target battery cells. The proposed fast-charge algorithm is simultaneously executed on the target BMS chip and the host-side software to provide optimized performance by integrating the on-cell extracted battery characteristics.
The Simulink state-flow
TM implementation, which is described in
Figure 15, is translated into the MCU firmware to interact with the interface (I/F) MCU as a charger chip and the client-side BMS chip. The control flow of the supervisor in PC is implemented as a host-side charging algorithm to perform the interoperation with I/F MCU. The I/F MCU serves as a bridge charger between the host-side supervisor and the client-side BMS, which is attached to the battery packs.
In the following state, the proposed system starts to charge the battery using the selected optimal pulse until the SOC is divisible by 2. These search and charge sequences, in runtime, will cycle until the completed state is achieved in terms of the battery capacity.
4.2. Charging Test for Lithium-Ion Battery
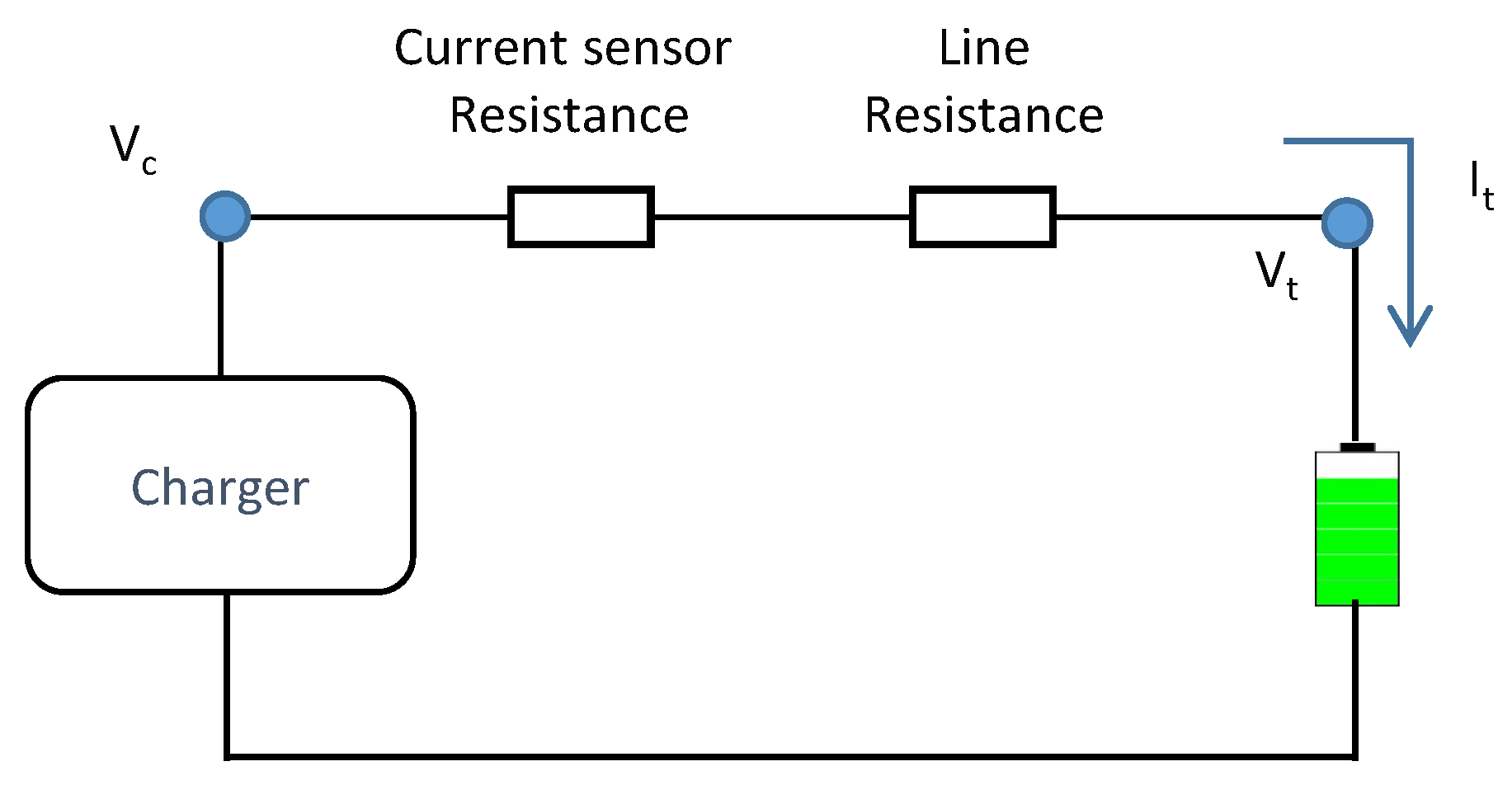
The LTC6802-2 battery monitoring IC can monitor the battery terminal voltage of not more than 12 cells connected in a series. The capacity of the INR18650-25R lithium ion battery, which is used in this work, is 2500 . The maximum charge voltage and the minimum discharge voltage are 4.2 and 2.5 , respectively. The standard charge current and the fast charge current are 1250 and 4000 , as provided by the manufacturer.
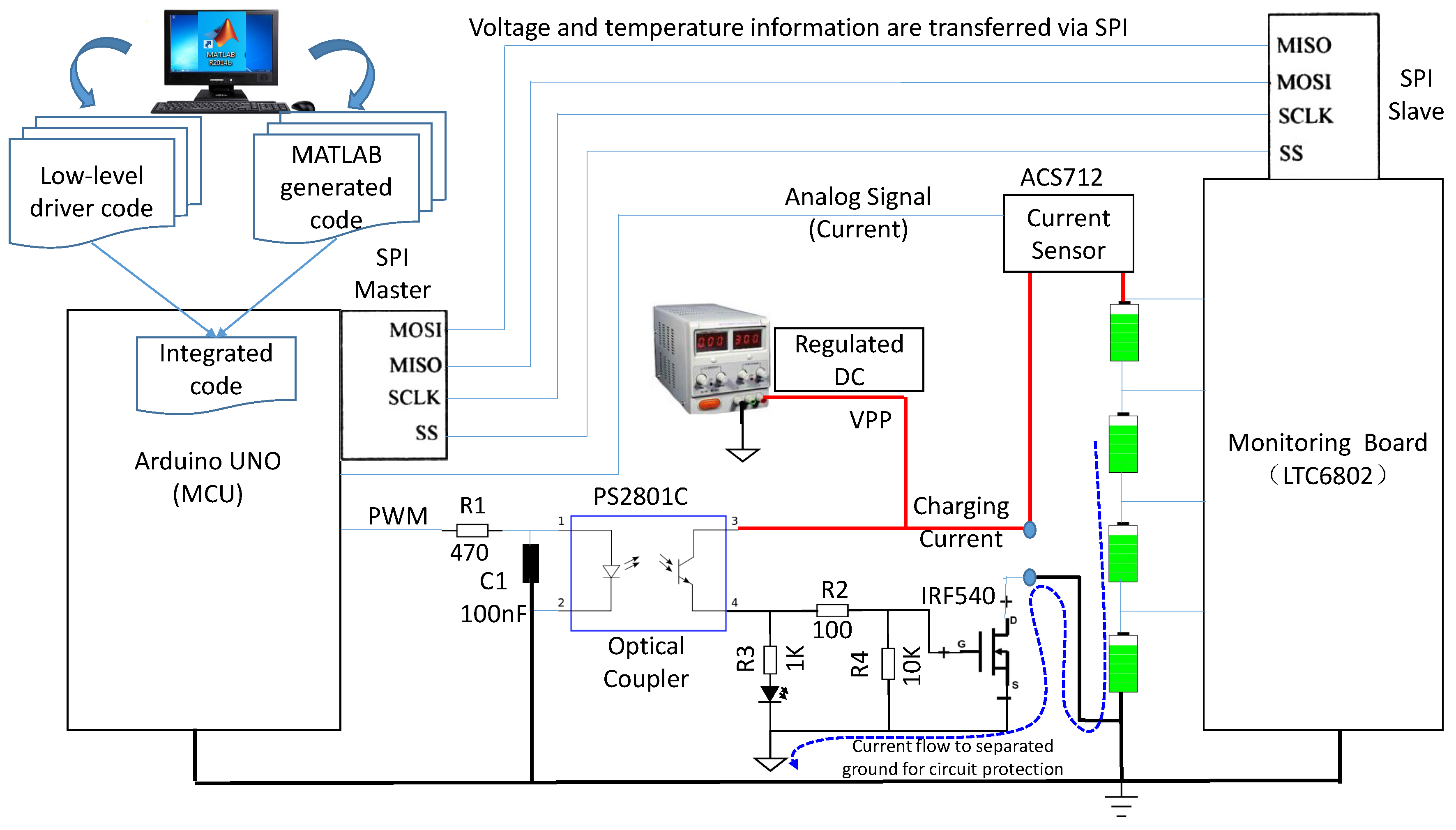
Considering the complexity and ease of development, this project adopted the Arduino UNO board as an MCU, as shown in
Figure 16. The microcontroller can communicate with the LTC6802-2 monitoring chip via serial peripheral interface (SPI) interface. ACS712 is a hall effect-based linear current sensor with 1.2 mΩ internal resistance and bidirectional current measurement ability. In this paper, we used hall effect sensor to resolve the difficulties in implementing current-to-voltage conversion with small voltage drop. In addition, hall effect sensor separates the high current path with low-voltage operated MCU. When field effect transistor (FET) turns on, excessive load on the line and circuit accidentally happens due to high short current. The separated ground is used to redirect the high current from the battery, which is described as a blue-dotted line near the FET switch in
Figure 16. It converts the sensing current into a 1.5
to 3.5
voltage as an output. The output voltage responds directly to the current magnitude. The charging current should be monitored throughout the charging process to calculate the battery’s SOC.
Using the state flow developed in the simulation process, we could obtain the corresponding C code, which is downloaded into MCU IC. All of the low-level drivers are developed using the Arduino IDE (integrated development environment), such as the current sensor acquisition, the temperature sensor acquisition, the SPI communication control, the pulse-width modulation (PWM) control, and the timer control code. We integrated the low-level driver code, the MATLAB-based generated firmware into a single MCU.
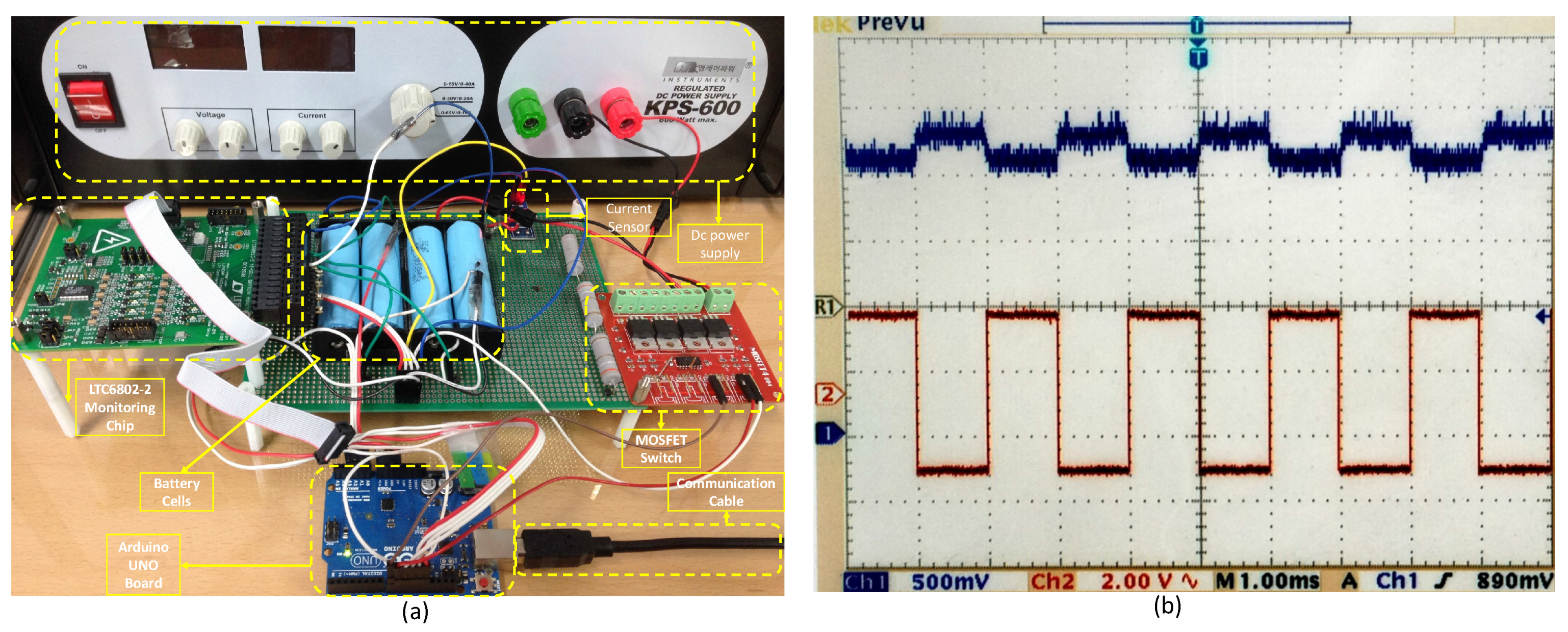
The pulse-width modulation, which is used for controlling the duty and frequency of the pulse charging method, is generated at a cycle-accurate level by MCU. The experiment environment setup is captured in
Figure 17a. Through the communication channel, the MCU board can monitor the battery’s status from the host computer and collect the parameters, such as the charging current, the cell terminal voltage, the cell temperature, the pulse frequency, and the duty cycle, in order to perform the proposed pulse controlling algorithm.
As an example, the charge pulse of 500
frequency and 50% duty cycle as an example is obtained from the output voltage signal of the current sensor (dark blue) and the corresponding PWM control signal, which is described in
Figure 16, is measured as red-colored signal by oscilloscope as shown in
Figure 17b. The input of the optocoupler is controlled by the PWM output, which is a digital pulse with the appropriate frequency (from 500 Hz to 5000 Hz) and duty width. One column means 1
, and the pulse period is 2
. There are two channels in this figure. One horizontal line of the first channel (blue line) means 500
, and the second channel (red line) means 2
. The first channel, on behalf of the magnitude of the charging current, can be used to infer that the charging current is approximately 1.35
(185
/A) because the current sensor output value is 2.5
when the current is zero. The second channel on behalf of the PWM control signal has the same period and an amplitude of 5
.
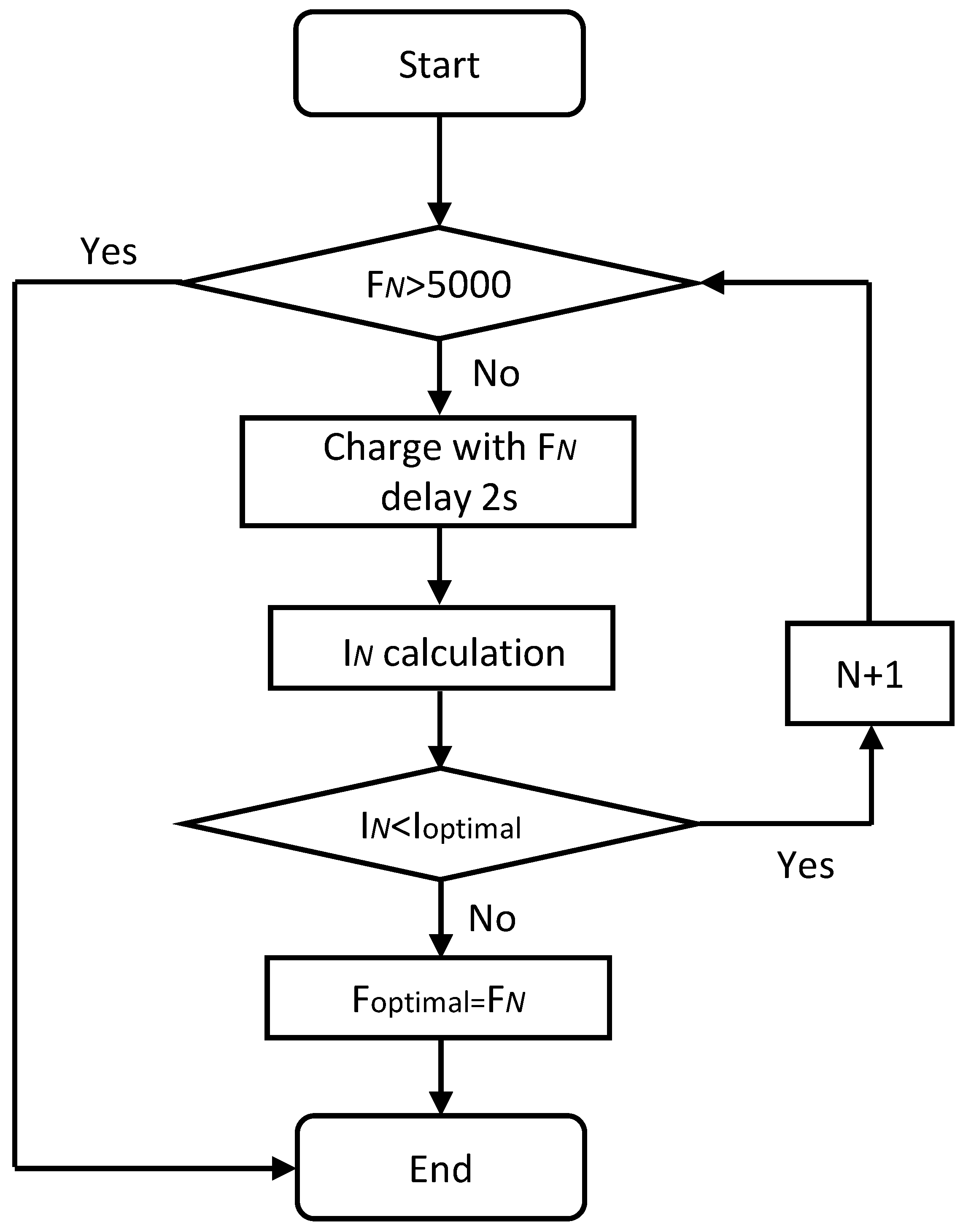
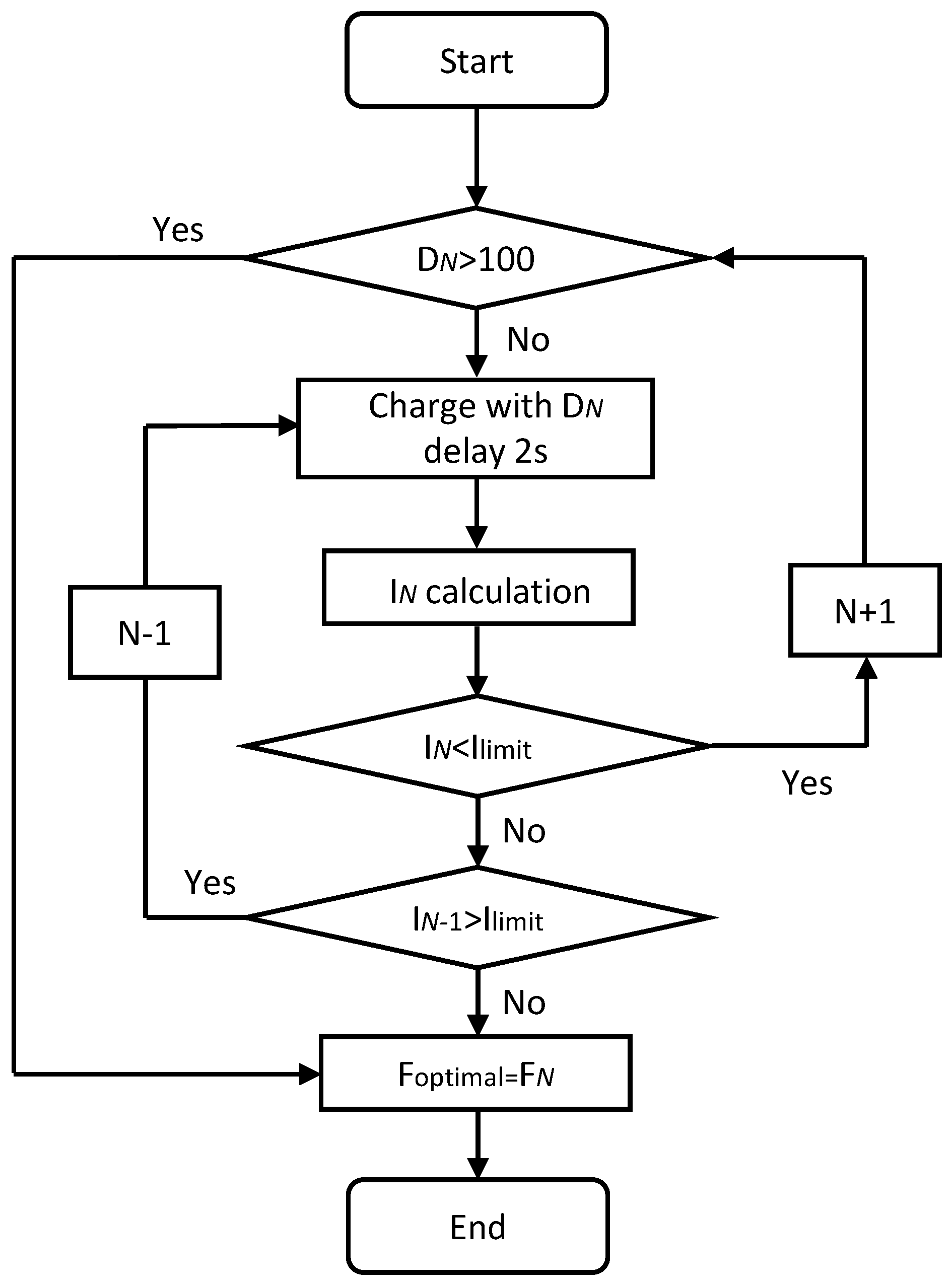
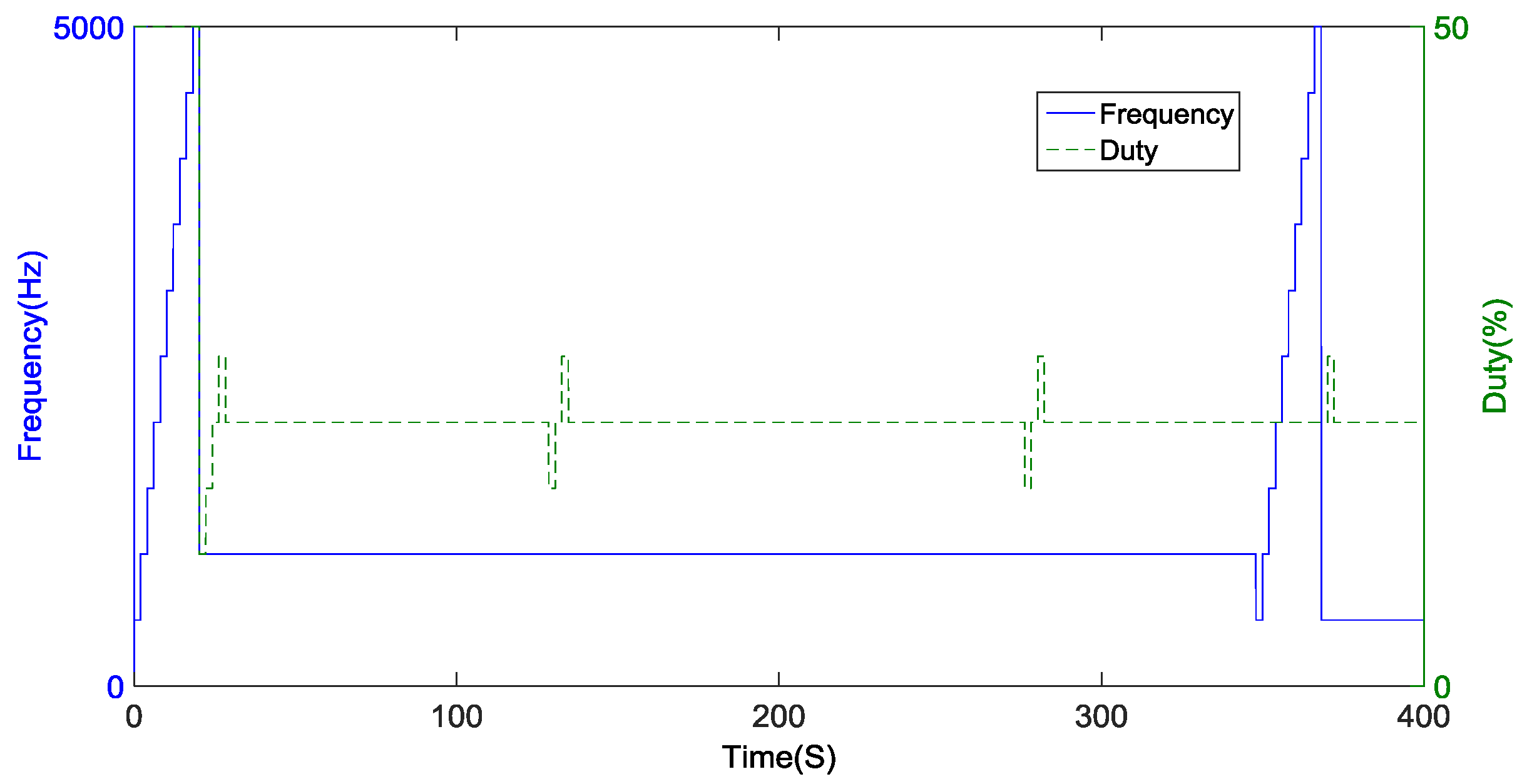
Figure 18 shows the measurement result of the proposed pulse-based charging operation using the frequency searching mode and duty searching mode, respectively, during one cycle. Using the MATLAB/Simulink, the PC-side model-driven supervisor could indirectly probe the electrical signal for the implemented hardware. The 1000
frequency is obtained as the optimal charging frequency after changing the frequency from 500
to 5000
. Then, the following duty search mode tries to change the duty cycle from 10 to 25, from which the duty search algorithm determines that the optimal duty is 20%.
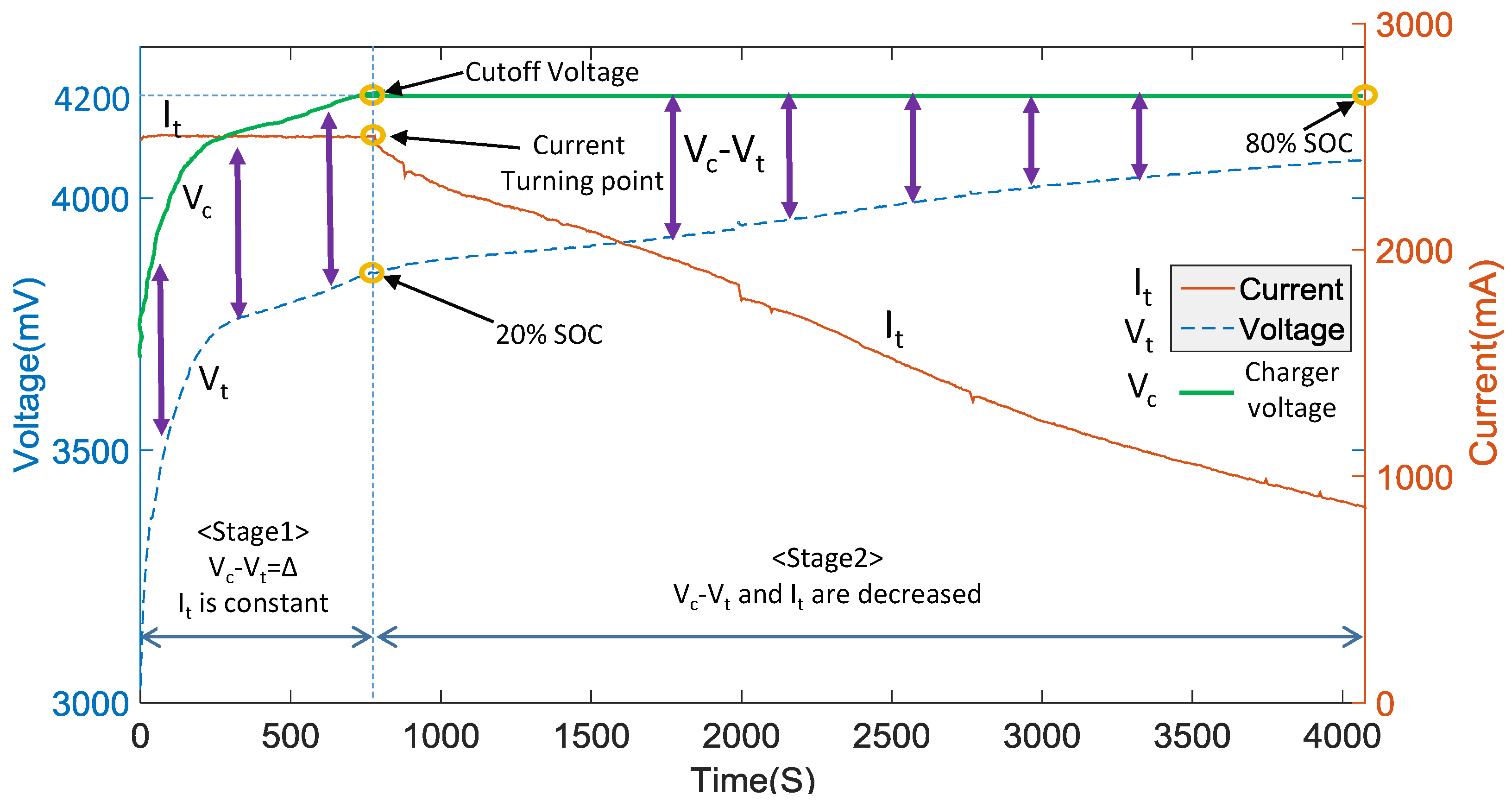
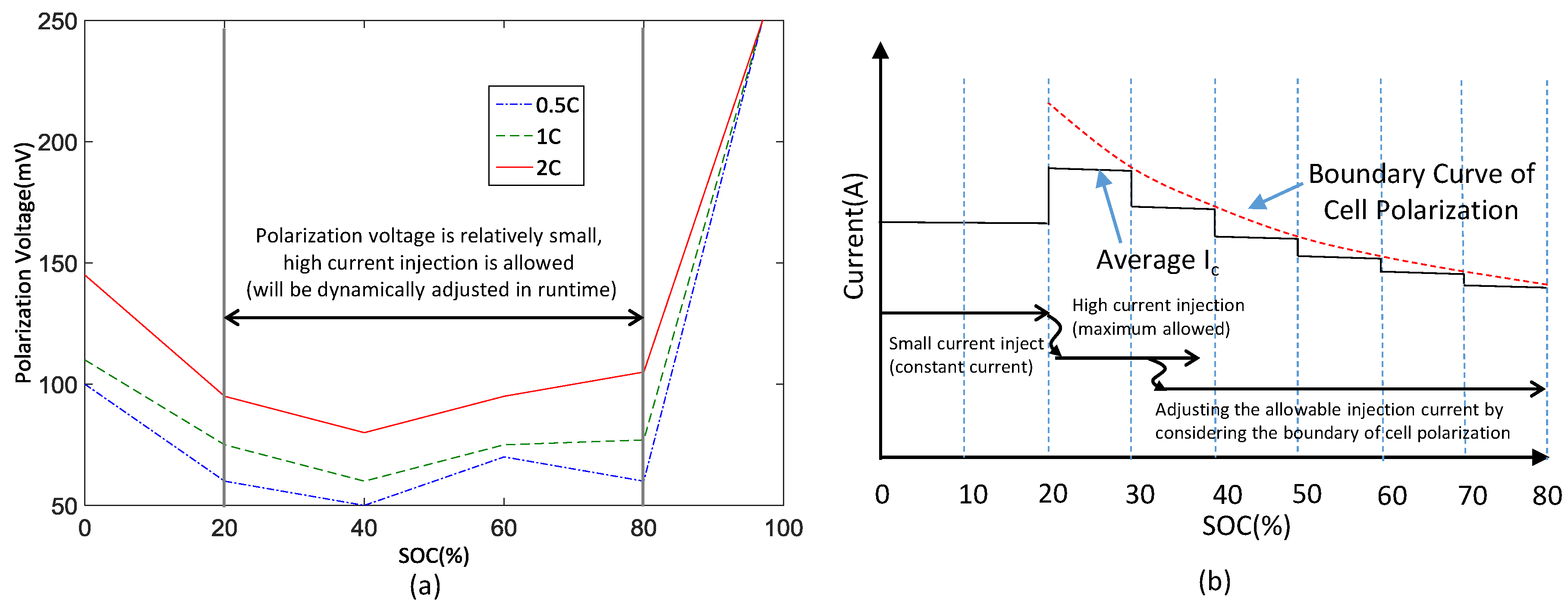
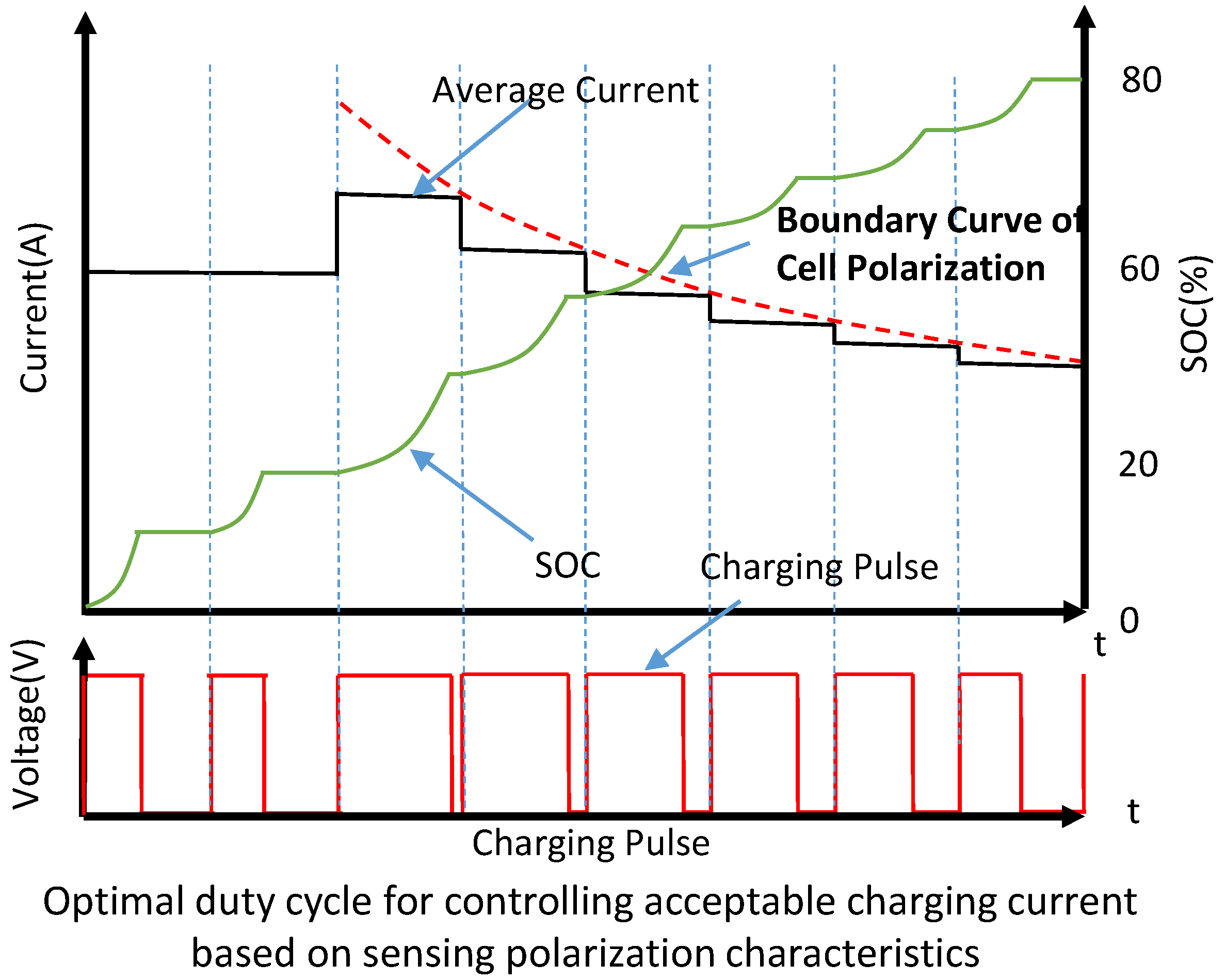
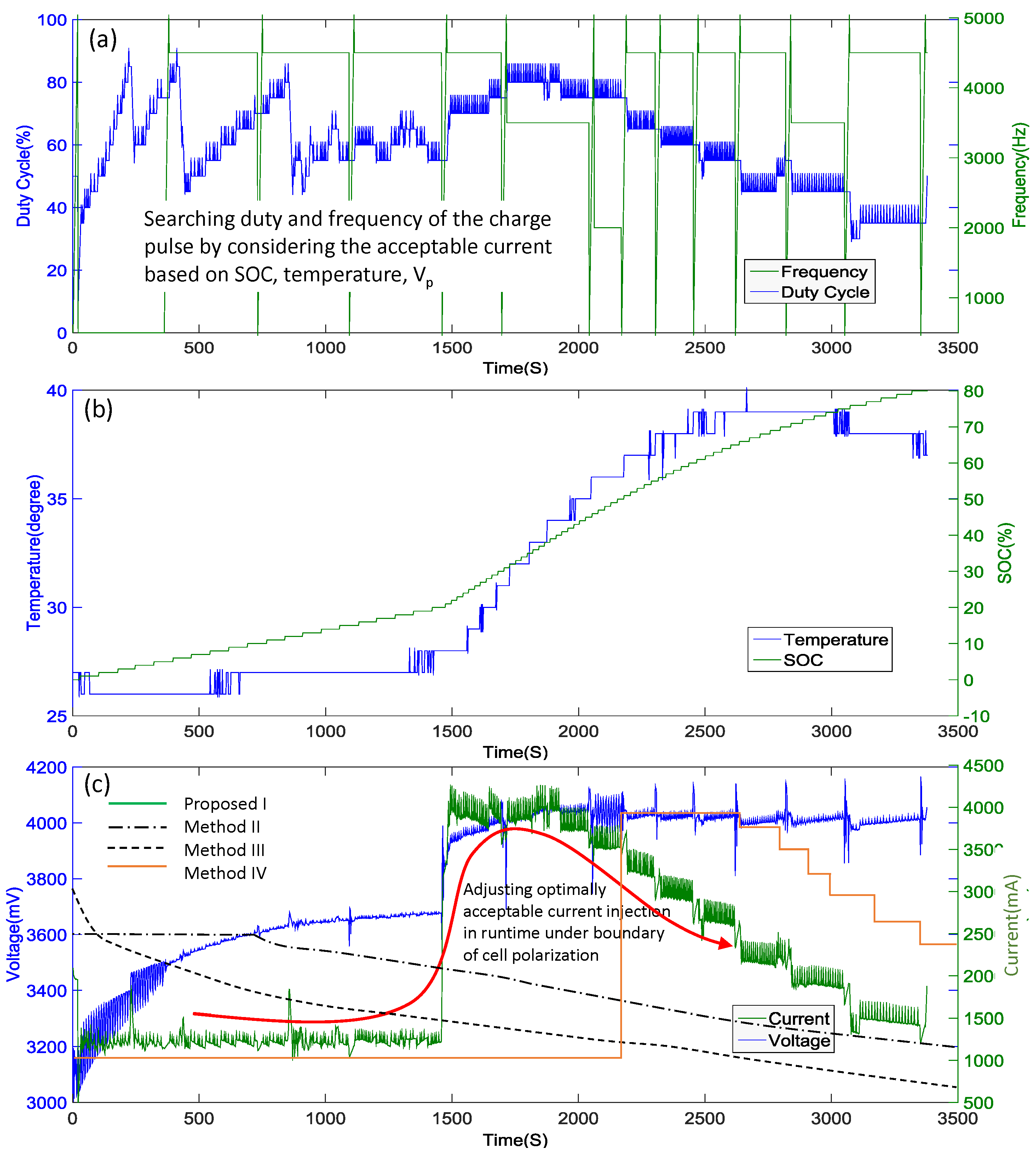
From 0% SOC to 20% SOC, the battery is charged at C/2 (standard charge current) as the polarization phenomenon is serious, as mentioned above. Then, the second stage tries to charge at 4
(fast charge current) until the level reaches the polarization curve. The charger continues charging until SOC is 80%, as shown in
Figure 19.
Optimal frequency is obtained at the beginning and regained with every 5% SOC increase in the charging process. The optimal duty cycle is continuously obtained with every 0.2% SOC increase.
Figure 19 shows that the SOC and the temperature increase rapidly after 20% SOC and that the highest temperature rise is 12
C, from 26
C to 38
C. Charging time from 0% to 80% SOC is 3318 s and from 20% to 80% is 1896 s.
To maintain the duty cycle in a suitable range, the initial charging voltage is set to 13.6
and adjusted four times when the SOC is 3%, 6%, 12%, and 20%, respectively, with a corresponding voltage of 14
, 15
, 15.4
, and 16.8
. It is a remarkable fact that the value of the duty cycle is in a periodic oscillation state using the proposed searching algorithm. At the same time, both the terminal voltage and the current also have some shocks. In the optimal frequency searching mode, the abrupt change in current and voltage can be observed in
Figure 19. The experimental results show that the optimal pulse plays a critical role in the charging process.
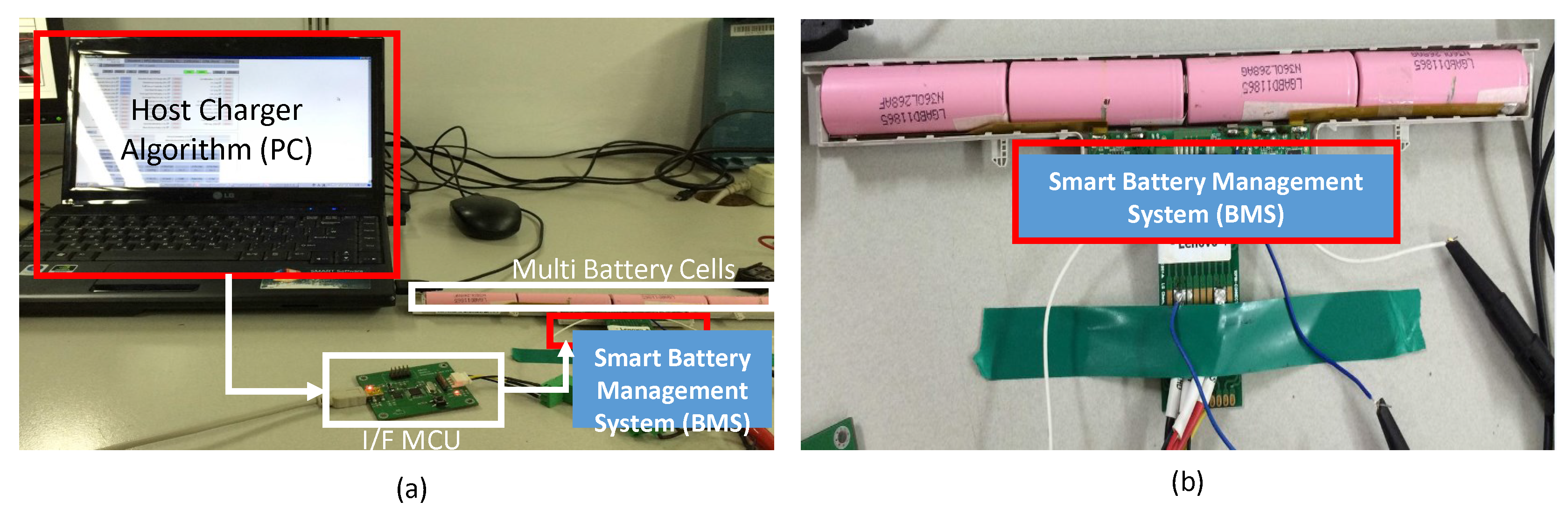
Figure 20a shows our system-on-chip implementation and evaluation environment, including the host-side controller and the slave-side BMS. The host-side controller executes the charge/discharge algorithm to control the slave-side BMS via the communication channel. The slave-side controller is implemented with an MCU-based algorithm executable chip to control the FET transistor, which is used to manage the current flow into the battery cells.
As shown in
Figure 20b, the BMS IC is attached to the board to measure the temperature, the current flow, and the voltage level of the target battery cells. The proposed fast-charge algorithm is simultaneously executed in the target BMS chip and host-side software to provide optimized performance by integrating the on-cell extracted battery characteristics.
4.3. Comparison of the Proposed Method and the Existing Method
In this section, a comparison experiment is conducted for the CC-CV, the fixed pulse (frequency of 500
, duty cycle of 50%), the polarization curve, and the proposed method. The CC-CV method adopts 2
constant current charging lasting for 805 s, with a total charging time of 4075 s. This illustrates that increasing the current in the CC stage does not speed up the charging process. The fixed pulse method adopts 500
, and a 50% duty fixed pulse, which has the longest charging time because the charging current is too high in the initial phase. As for the polarization curve method, it tries to charge the battery at C/2, which is the same as the proposed method, and then fails to charge the battery at 4
. Therefore, the selected C/3 charging current, with a total charging time of 4079 s, is shown in
Table 2.
The experiment results show that the proposed charge method achieves the fast charging speed within operating temperature. This is especially suitable for the charge for EV or PHEV from 20% SOC to 80% SOC.
We assumed the cell equalization is performed after the pulse-based charging is triggered during the singles charging period so that all battery cells have the same terminal voltage and SOC. From the evaluation using the proposed charger for four battery cells, further works are needed so that the fast charging is feasible for more large-scale batteries. The scalability issue using the proposed charging approach will be resolved after accurate cell equalization is performed by communicating and sharing the cell characteristics between the group of cells.
The implemented charger circuit is composed of the discrete components, including commercial chips. Our initial approach focuses on evaluating the charging speed acceleration using the proposed method in terms of feasibility. Further works have to be performed to optimize the charger circuit topology. For example, the hall effect sensor has to be replaced with the small resistor and dedicated analog voltage-to-digital converter, and opto-coupler can be replaced with the switch IC on high voltage protected circuit. The circuit using two grounds also has to be improved, still protecting the circuit due to the over current.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}