
Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller



Abstract
:1. Introduction
2. System Model
- -
- X1 stands for output voltage, or grid voltage while it is connected to the grid;
- -
- X2 represents the inverter current;
- -
- X3 is the common DC capacitor voltage;
- -
- X4 is the DC storage current;
- -
- VB is the storage system voltage, to derive the model for simplicity, and it is considered constant;
- -
- s1 and s2 are complementary gate signals to derive the IGBT bridge, and those are either zero or one;
- -
- DBuck and DBoost are not complementary gate signals; to derive the chopper leg, those are either zero or one.
| Boost | Buck | |
| (6) | ||
| (7) | ||
| (8) | ||
| (9) |
3. Control Method
3.1. Chopper Control
3.1.1. Charging the Storage
3.1.2. Discharging Mode
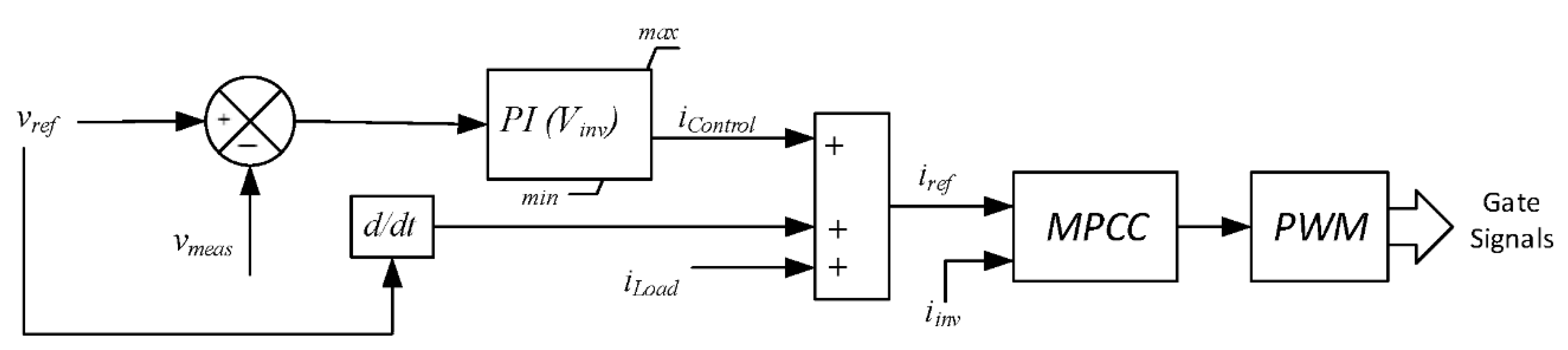
3.2. Inverter Control Method
3.2.1. Model Predictive Current Controller (MPCC)
3.2.2. Grid Connected Mode
3.2.3. Island Mode
4. Results
4.1. System Description
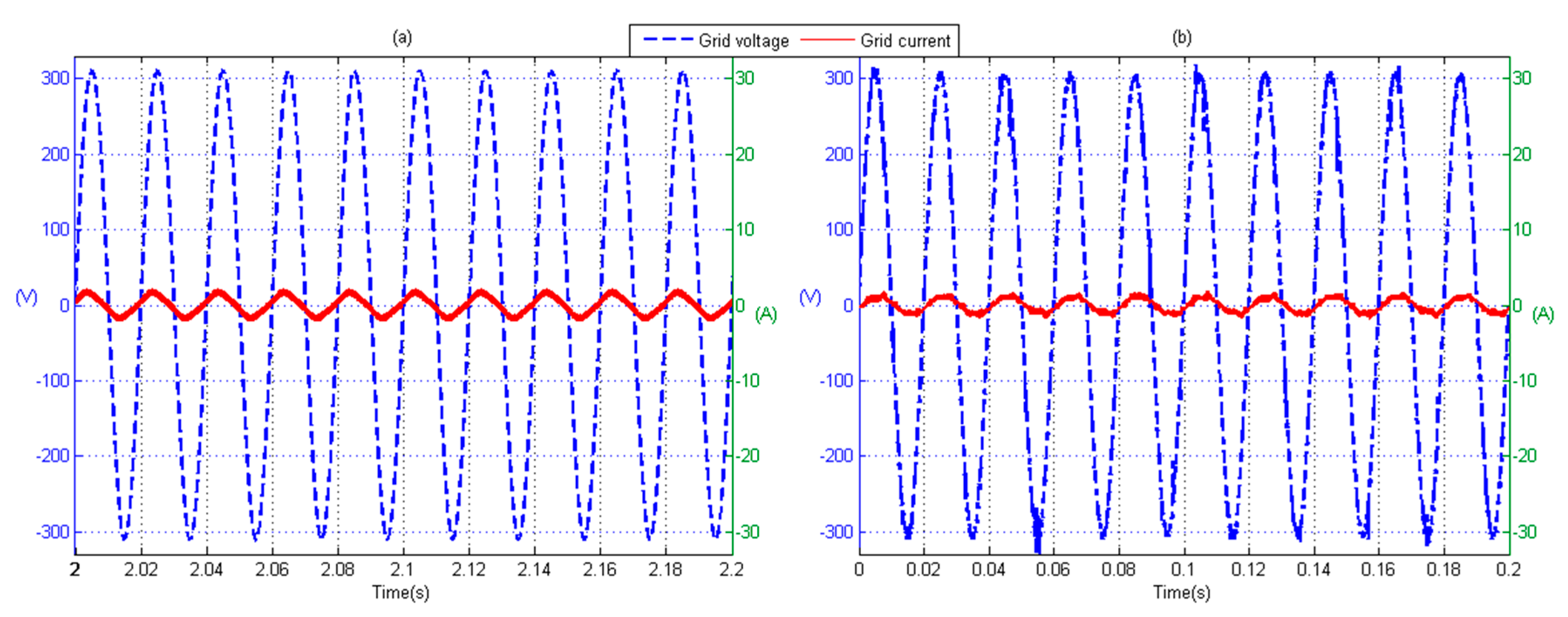
4.2. Scenario I: Grid Connected, No Load
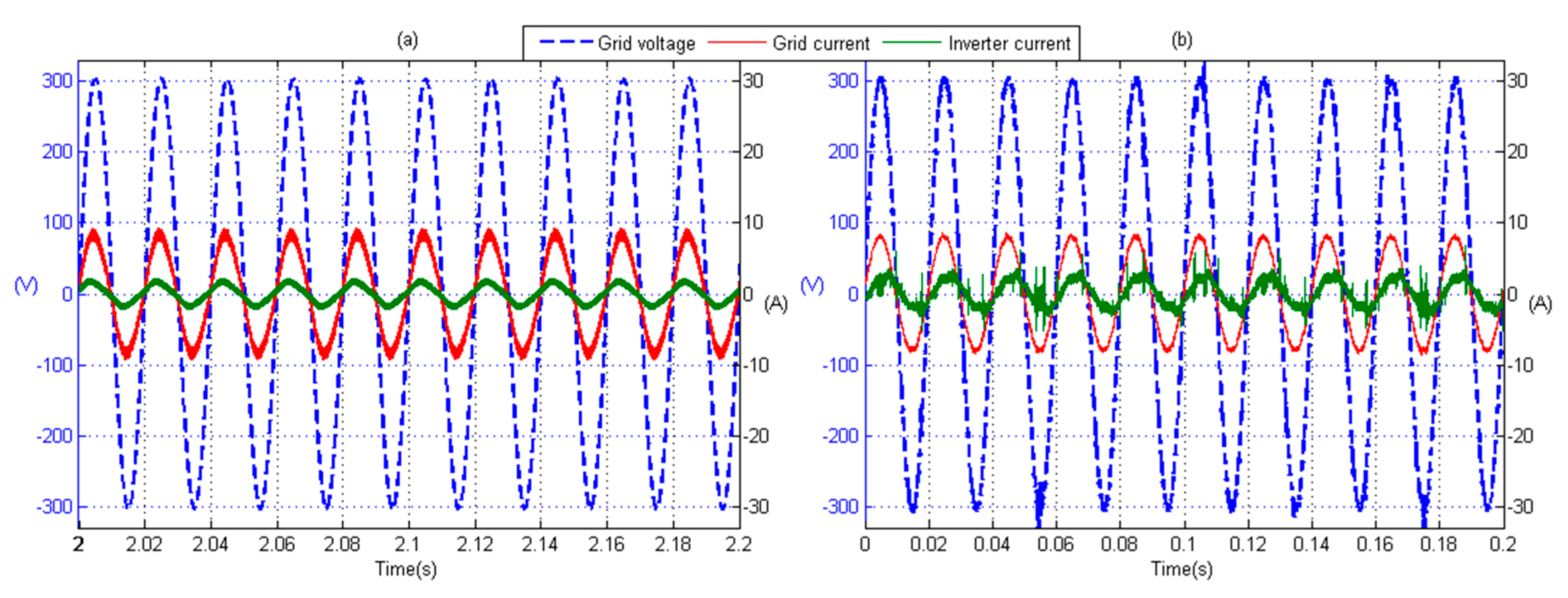
4.3. Scenario II: Grid Connected, 1 kW Resistive Load
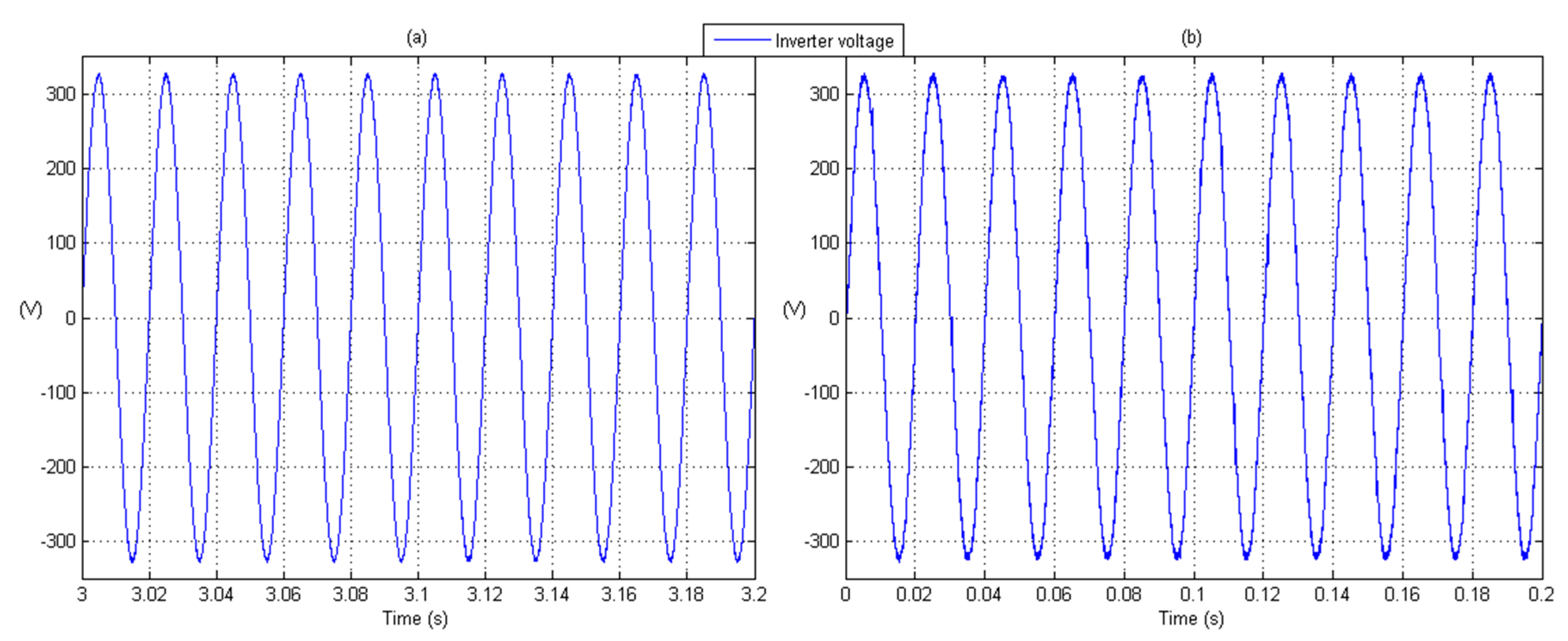
4.4. Scenario III: Island Mode, No Load
4.5. Scenario IV: Island Mode, 1 kW Resistive Load
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| RES | Renewable Energy Sources |
| DR | Distributed Resources |
| MG | Micro Grids |
| DG | Distributed Generation |
| UPS | Uninterruptible Power Supplies |
| PWM | Pulse Width Modulation |
| VOC | Voltage Oriented Control |
| DPC | Direct Power Control |
| DSP | Digital Signal Processors |
| FPGA | Field-Programmable Gate Array |
| MPC | Model Predictive Control |
| PI | Proportional Integral |
| MPCC | Model Predictive Current Controller |
| PI-MPCC | PI and MPCC |
| KVL | Kirchhoff’s Voltage Law |
| KCL | Kirchhoff’s Current Law |
| VSI | Voltage Source Inverter |
| CCCV | Constant Current Constant Voltage |
| DCM | Discontinuous Current operation Mode |
| TI | Texas Instruments |
| LTV | Linear Time Varying |
References
- Bose, B.K. Global warming: Energy, environmental pollution, and the impact of power electronics. IEEE Ind. Electron. Mag. 2010, 4, 6–17. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M. Universal integrated synchronization and control for single-phase DC/AC converters. IEEE Trans. Power Electron. 2015, 30, 1544–1557. [Google Scholar] [CrossRef]
- Accetta, G.; Della Giustina, D.; D’Antona, G.; Faranda, R.; Zanini, S. SmartDomoGrid: Reference architecture and use case analyses for a grid-customer interaction. In Proceedings of the 4th IEEE European Innovative Smart Grid Technologies (ISGT) Conference, Copenhagen, Danmark, 6–9 October 2013; pp. 1–4.
- Accetta, G.; D’Antona, G.; Della Giustina, D.; Hafezi, H.; Faranda, R. Open UPQC: A possible solution for customer power quality improvement. Shunt unit analysis. In Proceedings of the 16th IEEE International Confrence on Harmonics and Quality of Power, ICHQP, Bucharest, Romania, 25–28 May 2014; pp. 596–600.
- Kawabata, T.; Higashino, S. Parallel operation of voltage source inverters. IEEE Trans. Ind. Appl. 1988, 24, 281–287. [Google Scholar] [CrossRef]
- Walling, R.A.; Saint, R.; Dugan, R.C.; Burke, J.; Kojovic, L.A. Summary of distributed resources impact on power delivery systems. IEEE Trans. Power Del. 2008, 23, 1636–1644. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model predictive control of an inverter with output LC filter for UPS applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; PortilloGuisado, R.C.; Prats, M.A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Parvez Akter, M.D.; Mekhilef, S.; Nadia, M.L.T.; Akagi, H. Model predictive control of bidirectional AC-DC converter for energy storage system. J. Electr. Eng. Technol. 2015, 10, 165–175. [Google Scholar] [CrossRef]
- Kouro, S.; Cortés, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Appl. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Kojima, M.; Hirabayashi, K.; Kawabata, Y.; Ejiogu, E.C.; Kawabata, T. Novel vector control system using deadbeat-controlled PWM inverter with output LC filter. IEEE Trans. Ind. Appl. 2004, 40, 162–169. [Google Scholar] [CrossRef]
- Mattavelli, P. An improved deadbeat control for UPS using disturbance observers. IEEE Trans. Ind. Electron. 2005, 52, 206–212. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Buso, S.; Fasolo, S.; Mattavelli, P. Uninterruptible power supply multiloop control employing digital predictive voltage and current regulators. IEEE Trans. Ind. Appl. 2001, 37, 1846–1854. [Google Scholar] [CrossRef]
- Marwali, M.N.; Keyhani, A. Control of distributed generation systems—Part I: Voltages and currents control. IEEE Trans. Power Electron. 2004, 19, 1541–1550. [Google Scholar] [CrossRef]
- Escobar, G.; Mattavelli, P.; Stankovic, A.M.; Valdez, A.A.; Leyva-Ramos, J. An adaptive control for UPS to compensate unbalance and harmonic distortion using a combined capacitor/load current sensing. IEEE Trans. Ind. Electron. 2007, 54, 839–847. [Google Scholar] [CrossRef]
- Lee, J.H. Model predictive control: Review of the three decades of development. Int. J. Control Autom. Syst. 2011, 9, 415–424. [Google Scholar] [CrossRef]
- D’Antona, G.; Faranda, R.; Hafezi, H.; Bugliesi, M. Experiment on bidirectional single phase converter applying simple model predictive control. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1019–1024.
- Rodriguez, J.; Kazmierkowski, M.; Espinoza, J.; Zanchetta, P.; Abu-Rub, H.; Young, H.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Power Electron. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Cortes, P.; Wilson, A.; Kouro, S.; Rodriguez, J.; Abu-Rub, H. Model predictive control of multilevel cascaded H-bridge inverters. IEEE Trans. Ind. Electron. 2010, 57, 2691–2699. [Google Scholar] [CrossRef]
- Vahedi, H.; Al-Haddad, K.; Labbe, P.-A.; Rahmani, S. Cascaded multilevel inverter with multicarrier PWM technique and voltage balancing feature. In Proceedings of the IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2155–2160.
- Rivera, M.; Wilson, A.; Rojas, C.A.; Rodriguez, J.; Espinoza, J.R.; Wheeler, P.W.; Empringham, L. A comparative assessment of model predictive current control and space vector modulation in a direct matrix converter. IEEE Trans. Ind. Electron. 2013, 60, 578–588. [Google Scholar] [CrossRef]
- Rmili, L.; Rahmani, S.; Vahedi, H.; Al-Haddad, K. A comprehensive analysis of matrix converters: Bidirectional switch, direct topology, modeling and control. In Proceedings of the IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 313–318.
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Inf. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Hafezi, H.; Akpinar, E.; Balikci, A. Cascade PI Controller for Single-phase STATCOM. In Proceedings of the 16th International Power Electronics and Motion Control Confrence and Exposition, PEMC, Antalya, Turkey, 21–24 September 2014; pp. 127–132.
- Carmeli, M.S.; Castelli Dezza, F.; Faranda, R.; Marchegiani, G.; Mauri, M. Universal digital controller for power quality and distributed generation systems. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, SPEEDAM, Taormina, Italy, 23–26 May 2006; pp. 508–513.
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design, 2nd ed.; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Ho, W.-J.; Lio, J.-B.; Feng, W.-S. Economic UPS structure with phase-controlled battery charger and input-power-factor improvement. IEE Proc. Electr. Power Appl. 1997, 144, 221–226. [Google Scholar] [CrossRef]
- Castelli Dezza, F.; Faranda, R.; Mazzucco, I.; Redi, P.; Tironi, E. An interface converter for DG/storage system able to improve Power Quality of the load. In Proceedings of the IEEE Power Engineering Society General Meeting PES, Montreal, QB, Canada, 18–22 June 2006.
- D’Antona, G.; Della Giustina, D.; Faranda, R.; Hafezi, H. Open UPQC Power Quality Manager within Distributed Generation Systems. In Proceedings of the IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015; pp. 501–507.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Nominal Voltage | 230 V rms |
|---|---|
| Nominal frequency | 50 Hz |
| Storage voltage | 80 V |
| DC bus voltage | 450 V |
| DC bus capacitor C | 3 parallel 6800 µF |
| DC side switching inductance L | 1 mH |
| ac side switching inductance L | 1 mH |
| Inverter output filter | 10 µF |
| Max power switches (IGBT) | 195 A |
| Batteries | 12 V, 12 Ah, Sealed Lead-Acid |
| Sampling time | 10 µs |
| kp | ki | Output Saturation | |||
|---|---|---|---|---|---|
| Item | Max | Min | |||
| PI (VB) | 0.5 | 35 | IDC_ref | 3 A | 0 A |
| PI (VDC) | 3 | 25 | IDC_ref | 45 A | 0 A |
| PI (IDC) | 12 | 50 | Duty cycle | 0.95 | 0 |
| PI (Vinv) | 0.74 | 3000 | IControl | 35 A | −35 A |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Antona, G.; Faranda, R.; Hafezi, H.; Bugliesi, M. Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller. Energies 2016, 9, 233. https://doi.org/10.3390/en9040233
D’Antona G, Faranda R, Hafezi H, Bugliesi M. Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller. Energies. 2016; 9(4):233. https://doi.org/10.3390/en9040233
Chicago/Turabian StyleD’Antona, Gabriele, Roberto Faranda, Hossein Hafezi, and Marco Bugliesi. 2016. "Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller" Energies 9, no. 4: 233. https://doi.org/10.3390/en9040233
APA StyleD’Antona, G., Faranda, R., Hafezi, H., & Bugliesi, M. (2016). Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller. Energies, 9(4), 233. https://doi.org/10.3390/en9040233