
Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller


Abstract
:1. Introduction
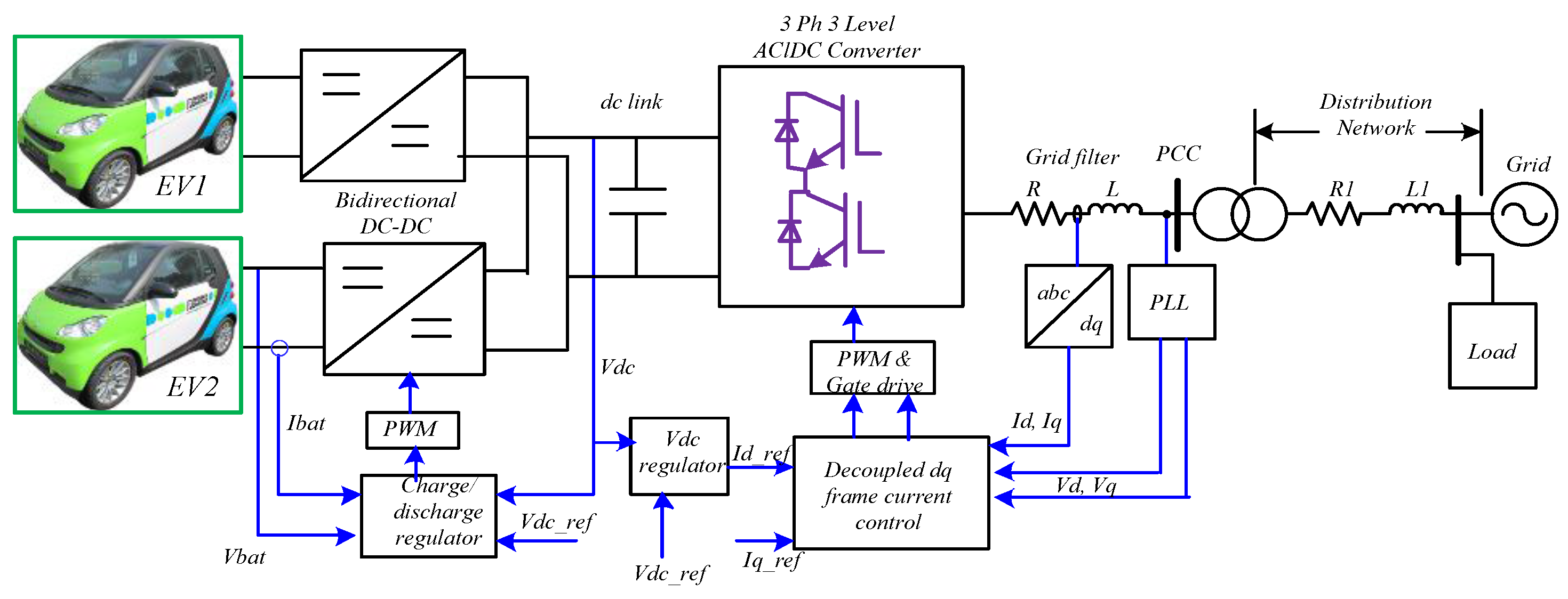
2. Studied EV Charging Station
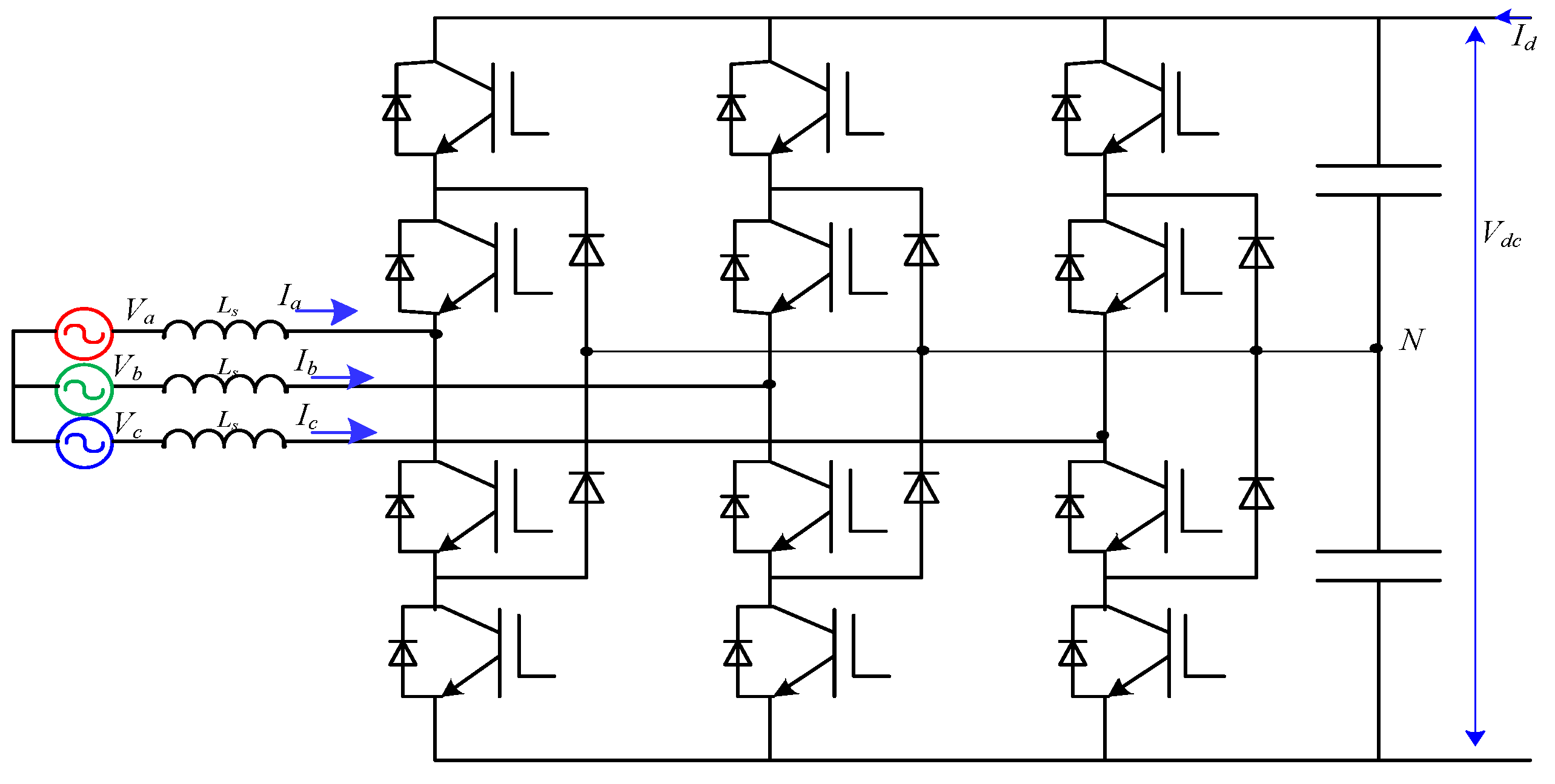
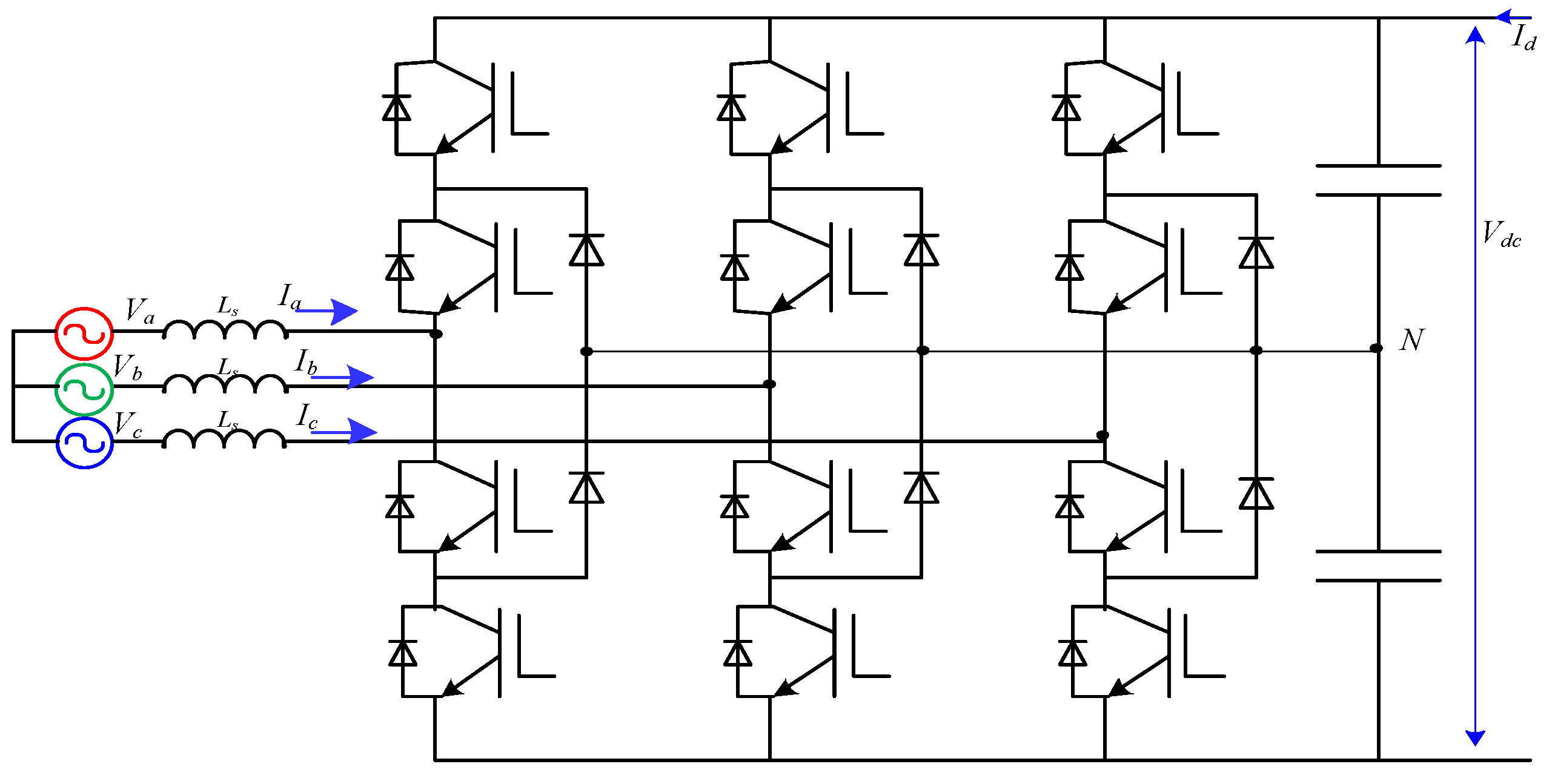
2.1. Three-Level PWM bidirectional Rectifier/Inverter
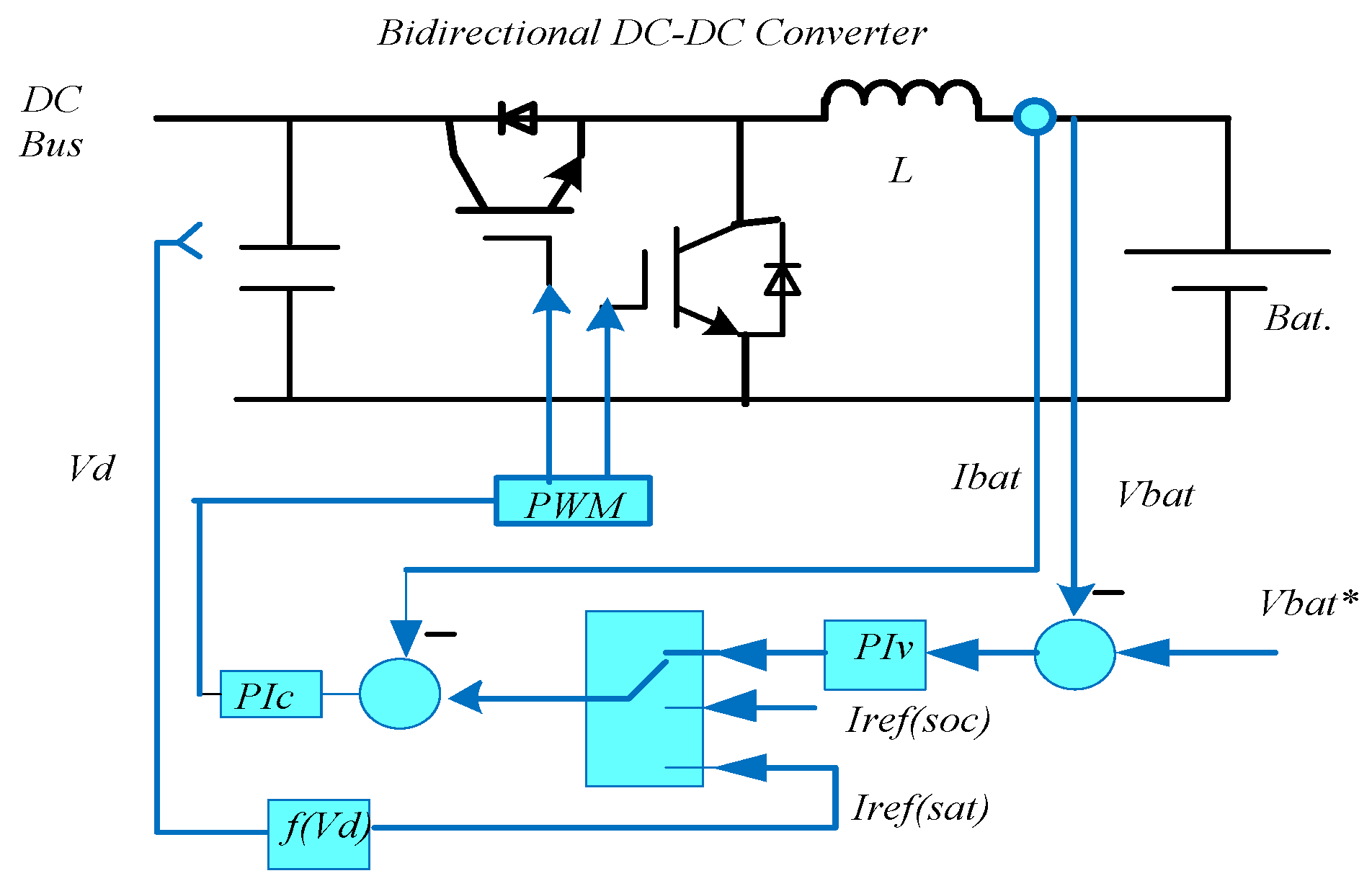
2.2. EV-Side Converter
3. Charging Station Control Strategy
3.1. Battery Charging/Discharging Requirements
3.2. Control of EV-Side Converter
- Case 1: In the case of Iref < 0, the switch is in the bottom position, and the circuit is controlled to operate in the CC discharge mode. The energy is supplied by the battery to the utility grid or to another EV. This can be done by regulating and adjusting the current reference. To prevent the DC–DC converter from operation at a non-linear modulation state, the voltage signal is generated by the current control loop, which is maintained between −Vtri and +Vtri through a saturation block, where Vtri refers to the magnitude of the triangle carrier PWM waveform.
- Case 2: If the current reference Iref > 0 and the EV battery SOC is below 70%, the switch is in the bottom position, and the EV-side converter operates in the condition of constant current charging.
- Case 3: If the current reference Iref > 0 and the EV battery SOC is over 70%, the switch is then moved to the top position, and the EV-side converter switches to CV charging mode. Hence, the voltage controller loop produces a reference current and passes it to the current-loop controller. In this case, the current-loop controller operates the DC/DC power converter to regulate the battery charging at the desired current reference.
3.3. Reactive Power Support function
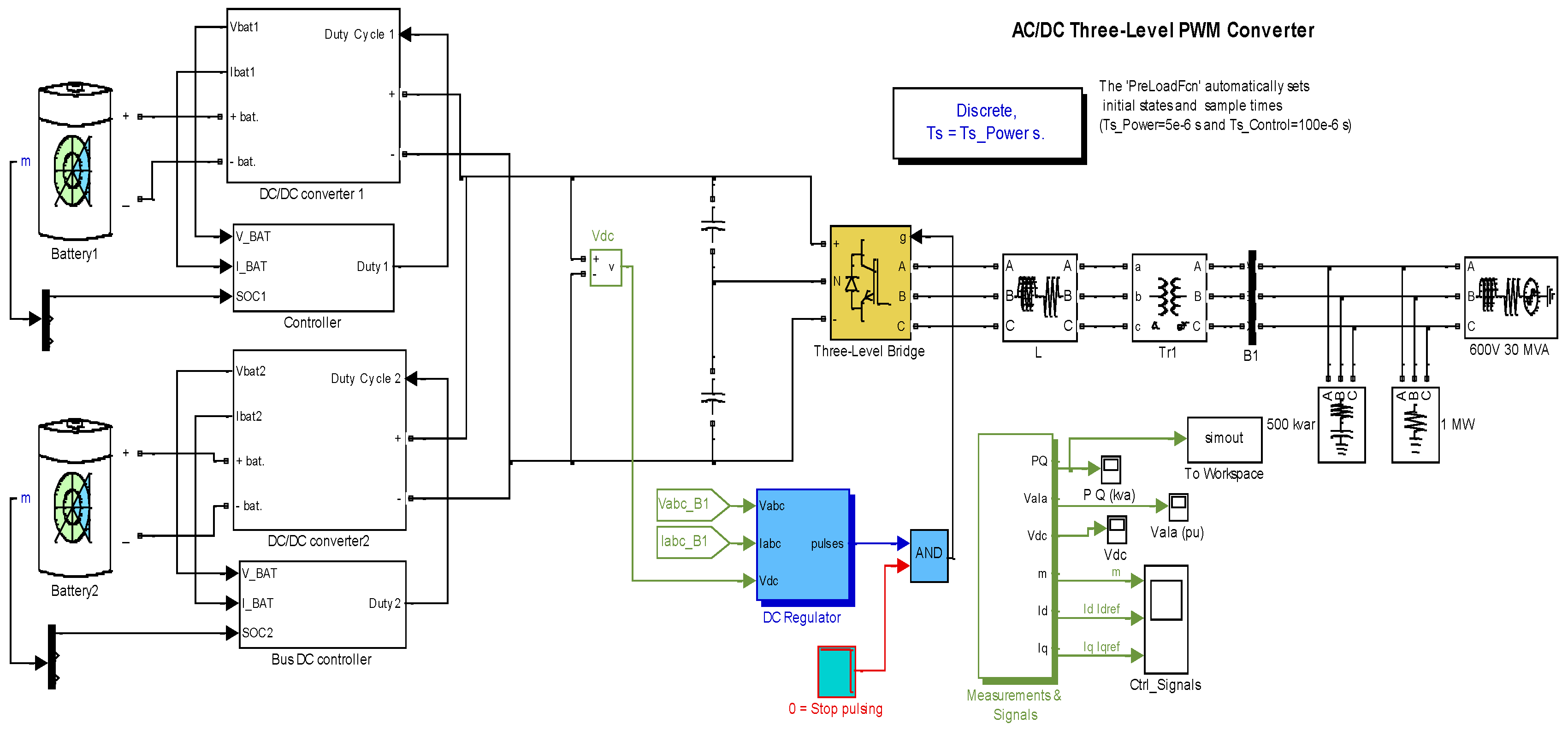
4. Simulation of EV Charger Station
4.1. Charging Controller
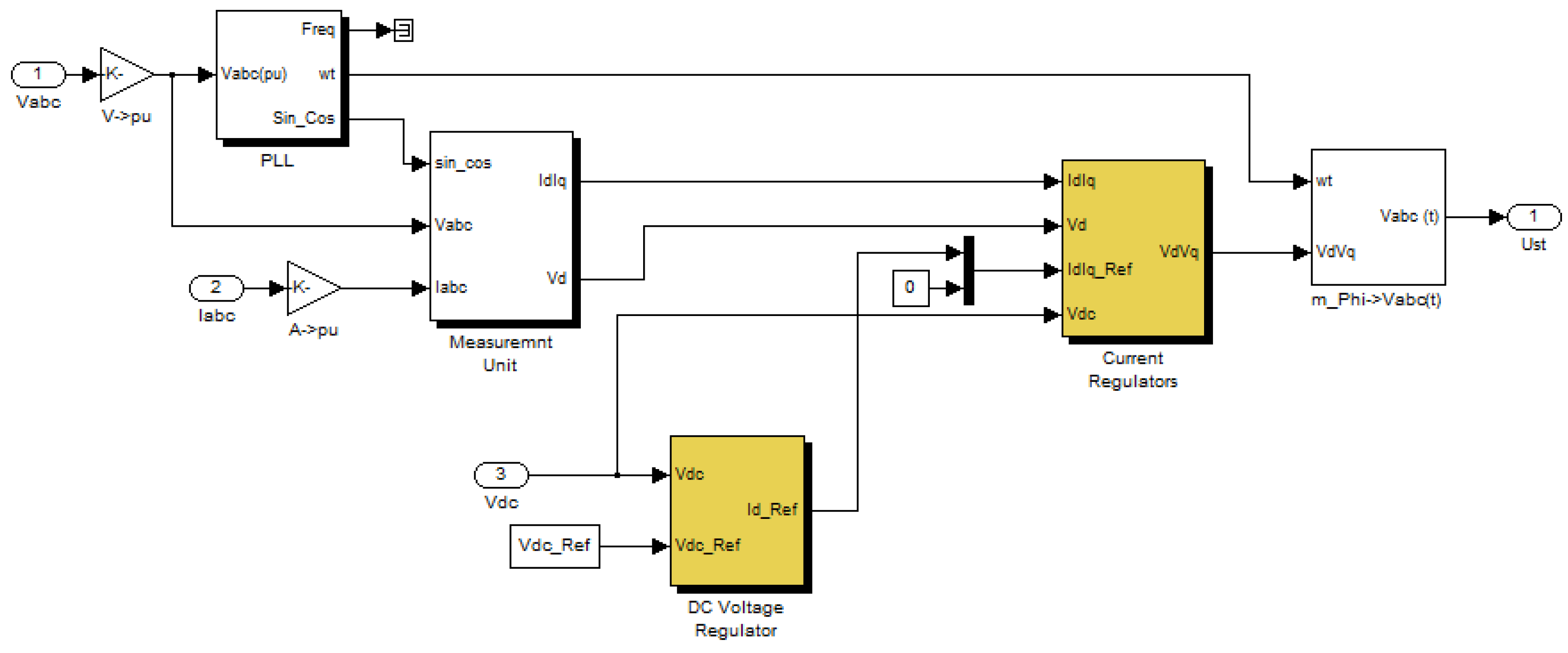
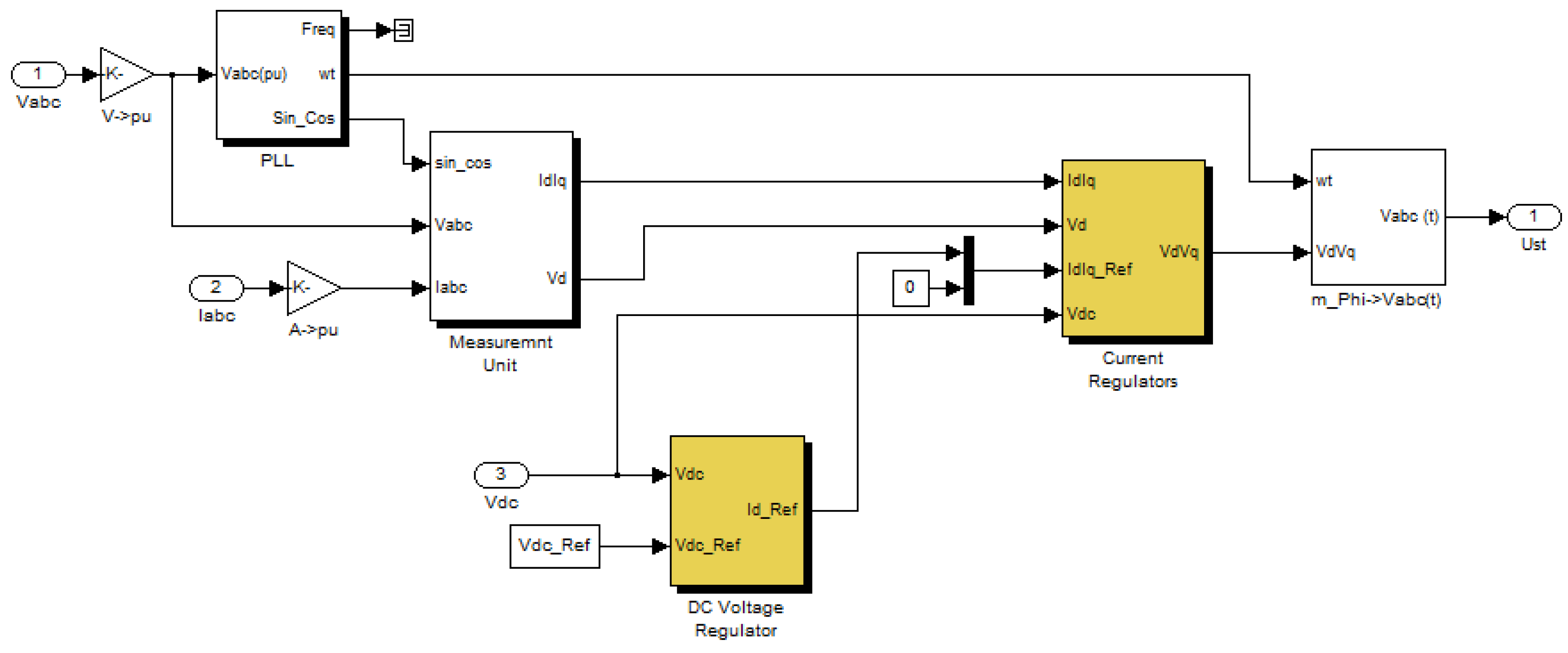
4.2. GSC Controller
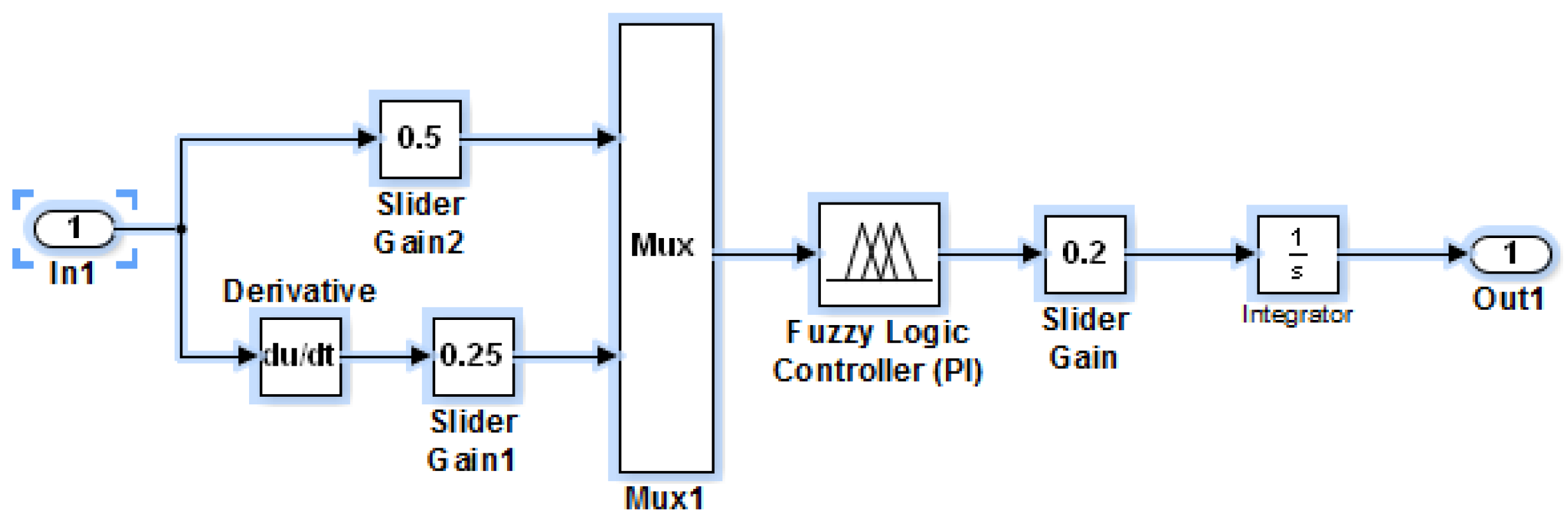
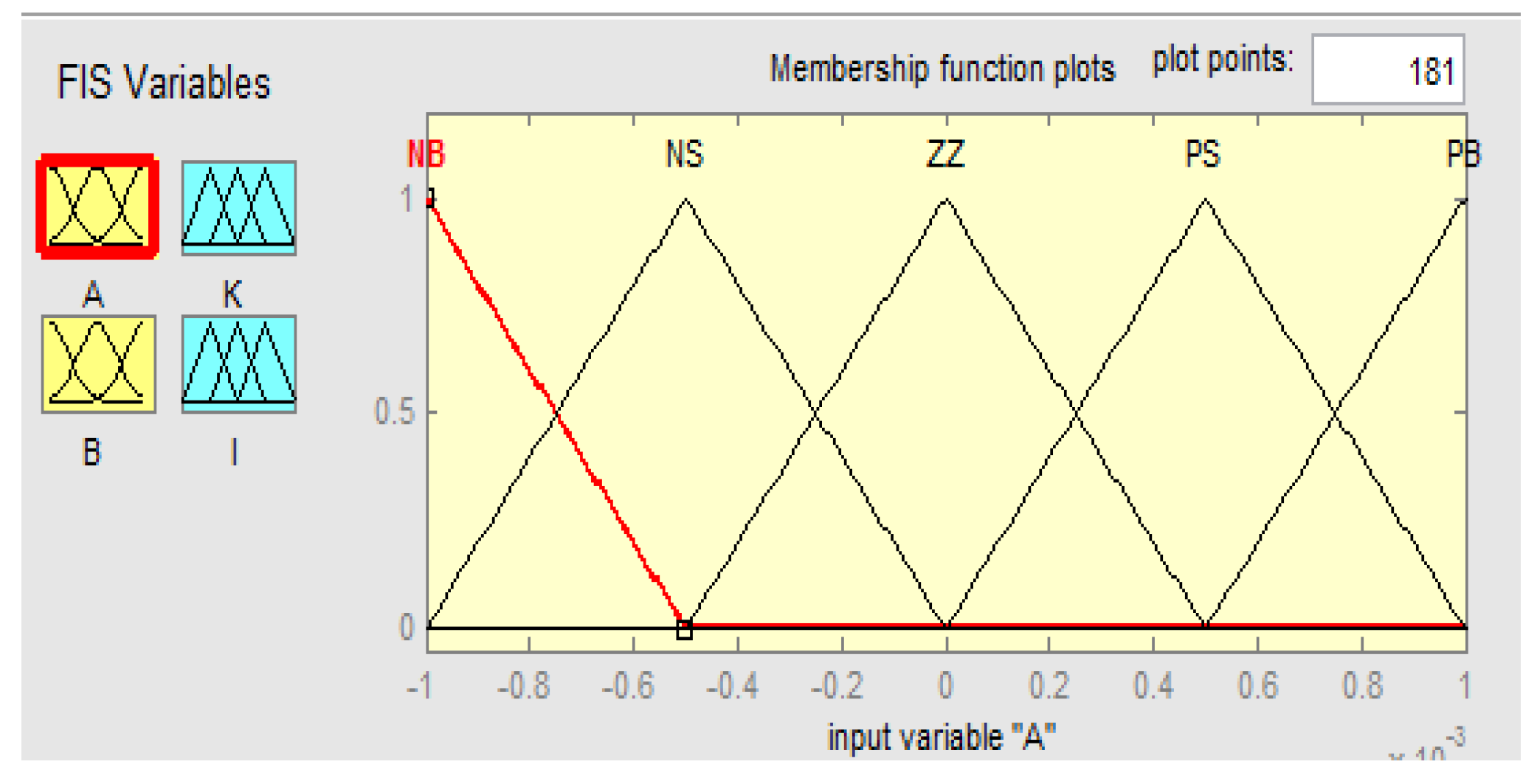
4.3. Proposed Fuzzy PI Controller
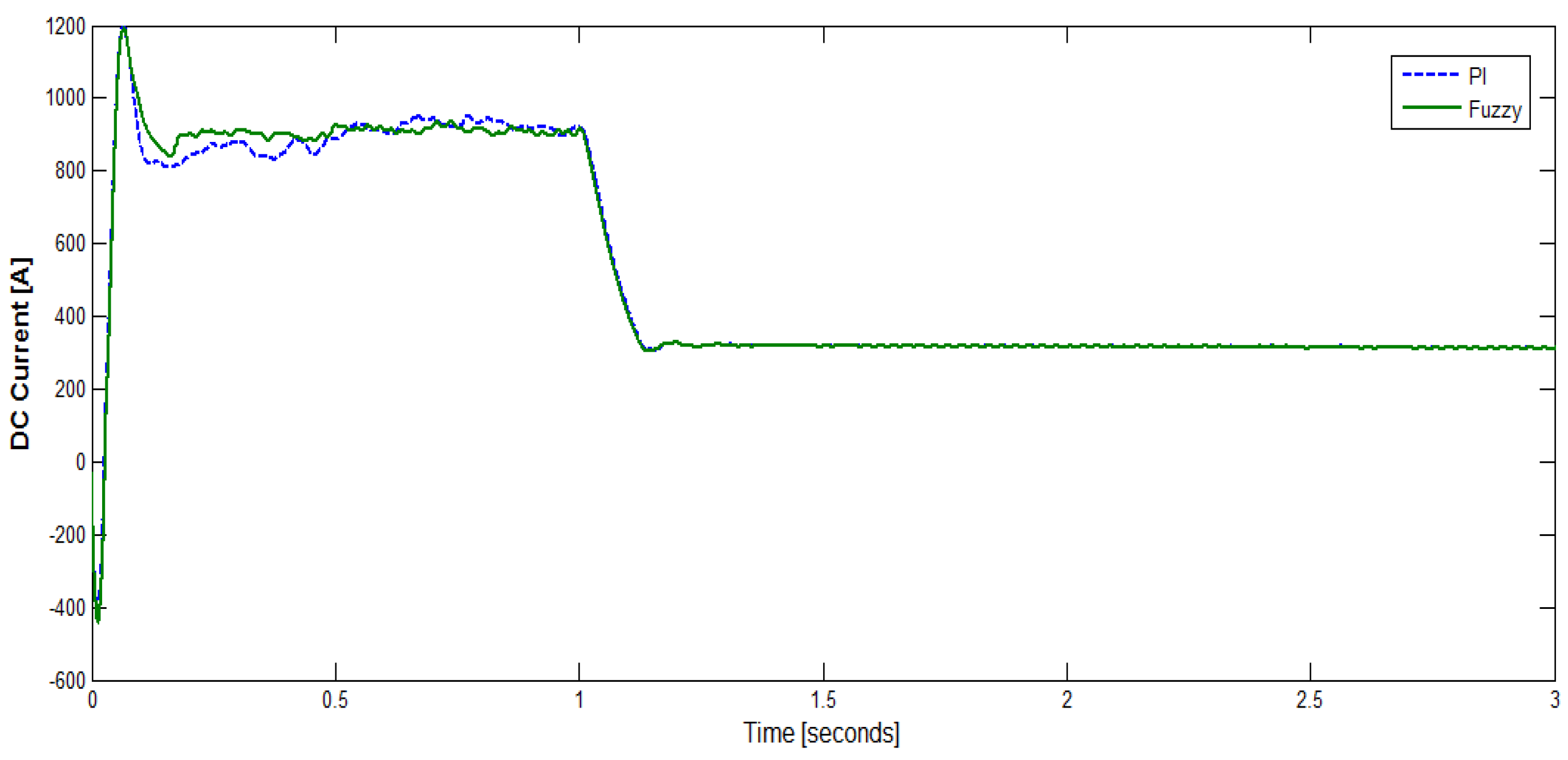
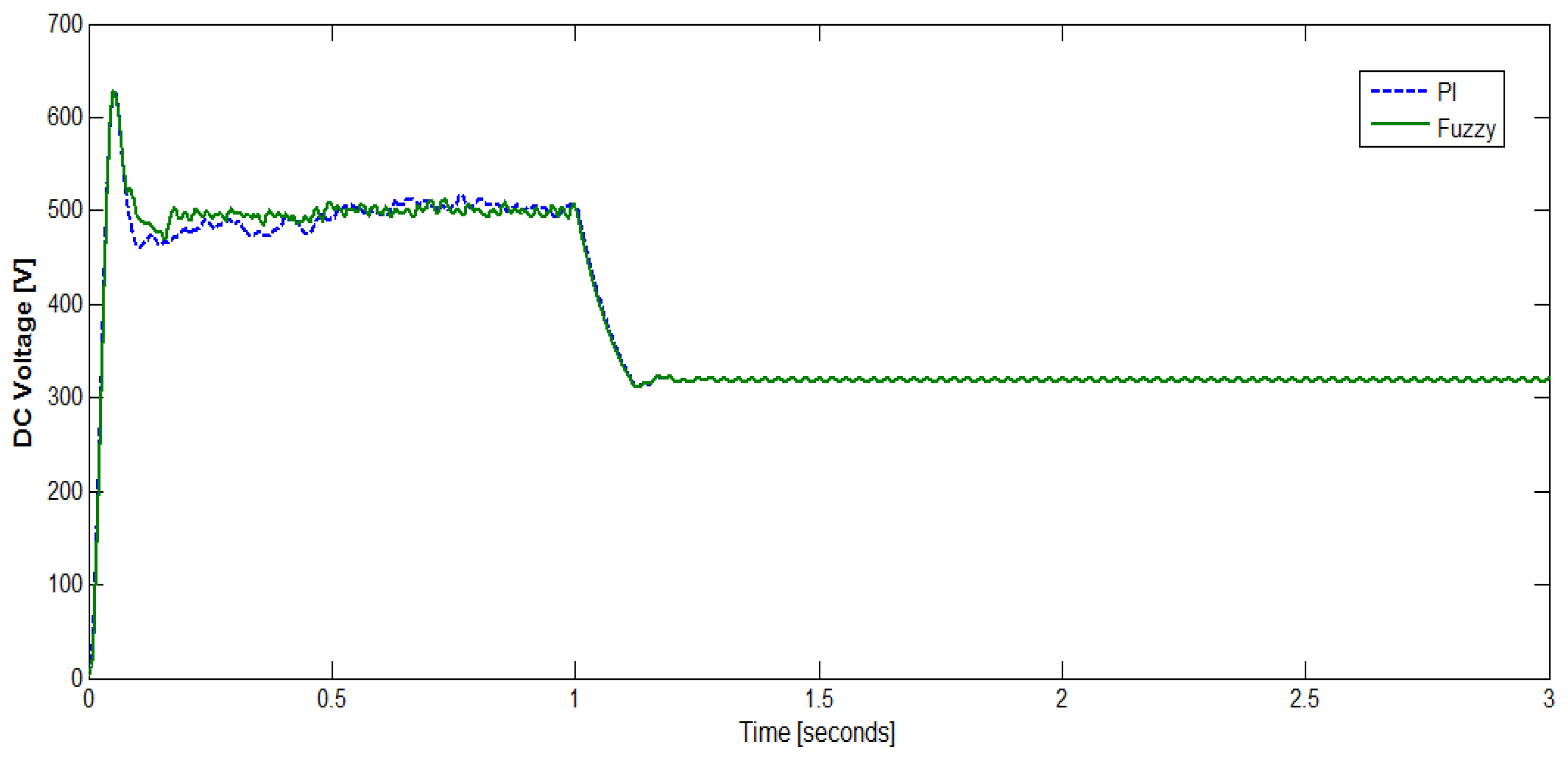
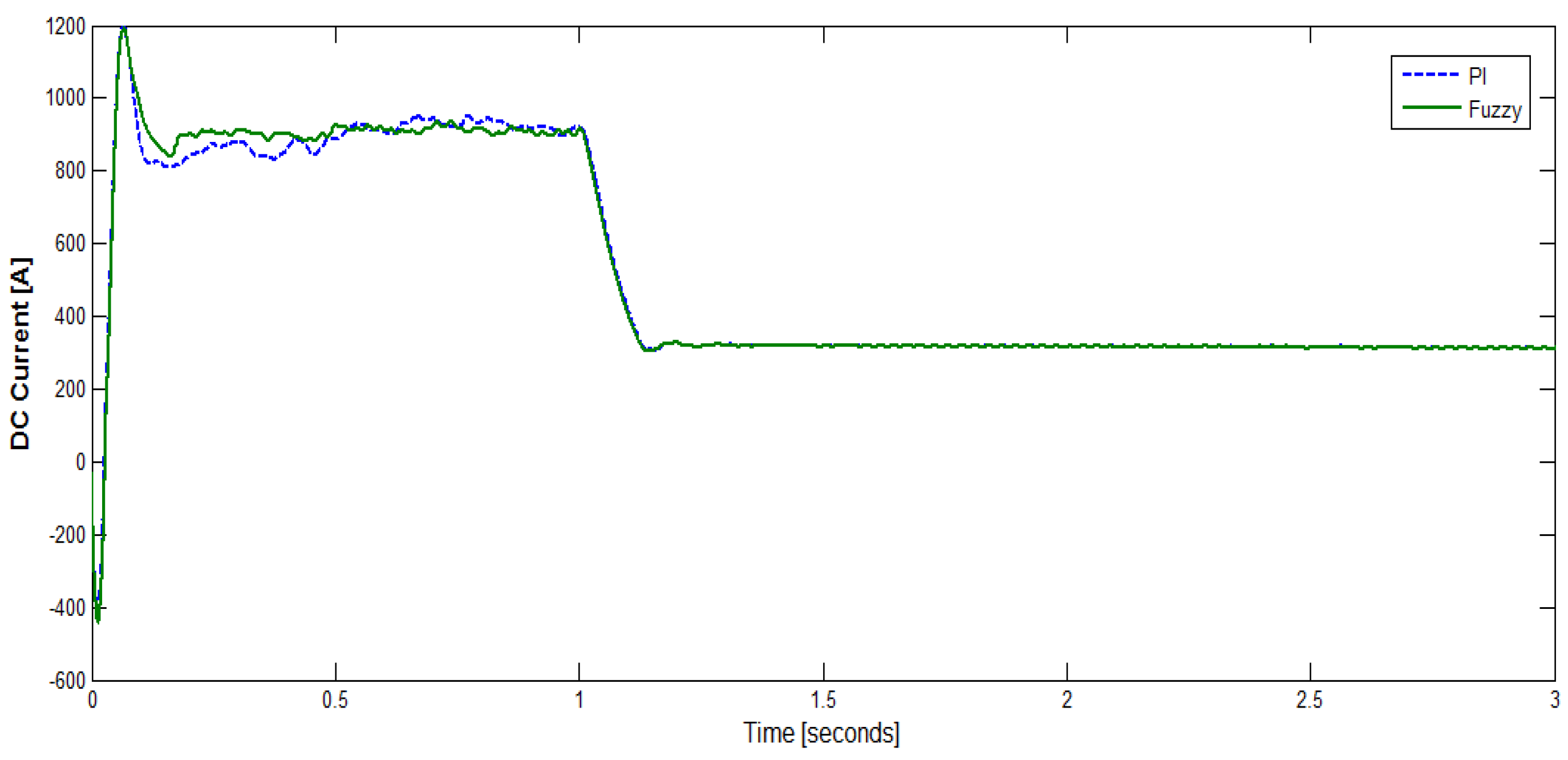
5. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PCC | Point of common coupling |
| CC | Constant current |
| CV | Constant voltage |
| EV | Electric vehicle |
| GSC | Grid -side converter |
| CSC | Charging station controller |
| SOC | State of charge |
| FLC | Fuzzy logic control |
| PI | Proportional-integral controller |
| PID | Proportional-integral-derivative controller |
| FL-PIC | Fuzzy logic-proportional integral controller |
| OVR | Output voltage regulation |
| OCR | Output current regulation |
| PHV | Parallel hybrid vehicle |
| PWM | Pulse width modulation |
| HEV | hybrid Electric Vehicle |
| V2G | Vehicle to grid |
| G2V | grid to vehicle |
| TPTL | Three-phase Three-level |
References
- Murat, Y.; Philip, T.K. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar]
- Long, B.; Lim, S.T.; Bai, Z.F.; Ryu, J.H.; Chong, K.T. Energy management and control of electric vehicles, using hybrid power source in regenerative braking operation. Energies 2014, 7, 4300–4315. [Google Scholar] [CrossRef]
- Fan, Y.; Zhu, W.; Xue, Z.; Zhang, L.; Zou, Z. A multi-function conversion technique for vehicle-to-grid applications. Energies 2015, 8, 7638–7653. [Google Scholar] [CrossRef]
- Lukic, S.M.; Cao, J.; Bansal, R.C.; Fernando, R.; Emadi, A. Energy storage systems for automotive applications. IEEE Trans. Ind. Electron. 2008, 55, 2258–2267. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Sezaki, K. Development of an optimal vehicle-to-grid aggregator for frequency regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar]
- Singh, M.; Kumar, P.; Kar, I. Implementation of vehicle to grid infrastructure using fuzzy logic controller. IEEE Trans. Smart Grid 2012, 3, 565–577. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-grid control for supplementary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2015, 30, 3110–3119. [Google Scholar] [CrossRef]
- Ma, C.; Huang, D. Comparative study of PI controller and fuzzy logic controller for three-phase grid-connected Inverter. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 2067–2071.
- Kesler, M.; Kisacikoglu, M.C.; Tolbert, L.M. Vehicle-to-grid reactive power operation using plug-in electric vehicle bidirectional offboard charger. IEEE Trans. Ind. Electron. 2014, 61, 6778–6784. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of single-phase improved power quality AC-DC converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of three-phase improved power quality AC-DC converters. IEEE Trans. Ind. Electron. 2004, 51, 641–660. [Google Scholar] [CrossRef]
- Erb, D.C.; Onar, O.C.; Khaligh, A. Bi-directional charging topologies for plug-in hybrid electric vehicles. In Proceedings of the 2010 Twenty-Fifth Annual IEEE on Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2066–2072.
- Manjrekar, M.D.; Steimer, P.K.; Lipo, T.A. Hybrid multilevel power conversion system: A competitive solution for high-power applications. IEEE Trans. Ind. Appl. 2000, 36, 834–841. [Google Scholar] [CrossRef]
- Carlton, D.; Dunford, W.G. Multilevel, unidirectional AC-DC converters, a cost effective alternative to bi-directional converters. In Proceedings of the 2001 IEEE 32nd Annual on Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001; pp. 1911–1917.
- Tolbert, M.L.; Peng, F.Z. Multilevel converters for large electric drives. In Proceedings of the Thirteenth Annual Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 15–19 February 1998.
- Tolbert, L.M.; Peng, F.Z.; Habetler, T.G. Multilevel converters for large electric drives. IEEE Trans. Ind. Appl. 1999, 35, 36–44. [Google Scholar] [CrossRef]
- Zhao, J.; Han, Y.; He, X.; Tan, C.; Cheng, J.; Zhao, R. Multilevel circuit topologies based on the switched-capacitor converter and diode-clamped converter. IEEE Trans. Power Electron. 2011, 26, 2127–2136. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, X.; Bai, S.; Lukic, S.; Huang, A. Review of nonisolated bi-directional DC–DC converters for plug-in hybrid electric vehicle charge station application at municipal parking decks. In Proceedings of the 2010 Twenty-Fifth Annual IEEE on Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1145–1151.
- Ruan, X.; Li, B.; Chen, Q.; Tan, S.C.; Tse, C.K. Fundamental considerations of three-level DC–DC converters: Topologies, analyses, and control. IEEE Trans. Circuits Syst. 2008, 55, 3733–3743. [Google Scholar] [CrossRef]
- Yacoubi, L.; Al-Haddad, K.; Fnaiech, F.; Dessaint, L.-A. A DSP-based implementation of a new nonlinear control for a three-phase neutral point clamped boost rectifier prototype. IEEE Trans. Ind. Electron. 2005, 52, 197–205. [Google Scholar] [CrossRef]
- Salaet, J.; Alepuz, S.; Gilabert, A.; Bordonau, J.; Peracaula, J. D-Q modeling and control of a single-phase three-level boost rectifier with power factor correction and neutral-point voltage balancing. IEEE Power Electron. Spec. Conf. 2002, 2, 514–519. [Google Scholar]
- Malinowski, M.; Stynski, S.; Kolomyjski, W.; Kazmierkowski, M.P. Control of three-level PWM converter applied to variable-speed-type turbines. IEEE Trans. Ind. Electron. 2009, 56, 69–77. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Mohamed, E.; Yuan, L. Performance evaluation of three control strategies for three-level neutral point clamped PWM rectifier. In Proceedings of the IEEE Twenty-Third Annual Applied Power Electronics Conference and Exposition, APEC 2008, Austin, TX, USA, 24–28 February 2008; pp. 259–264.
- Schouten, N.J.; Salman, M.A.; Kheir, N.A. Fuzzy logic control for parallel hybrid vehicles. IEEE Trans. Control Syst. Technol. 2002, 10, 460–468. [Google Scholar] [CrossRef]
- Li, S.; Bao, K.; Fu, X.; Zheng, H. Energy management and control of electric vehicle charging stations. Electr. Power Compon. Syst. 2014, 42, 339–347. [Google Scholar] [CrossRef]
- Bai, S.; Du, Y.; Lukic, S. Optimum design of an EV/PHEV charging station with DC bus and storage system. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010.
- Erol-Kantarci, M.; Mouftah, H.T. Management of PHEV batteries in the smart grid: Towards a cyber-physical power infrastructure. In Proceedings of the Wireless Communications and Mobile Computing Conference (IWCMC), Istanbul, Turkey, 5–8 July 2011.
- Divya, K.C.; Qstergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Barton, J.P.; Infield, D.G. Energy storage and its use with intermittent renewable energy. IEEE Trans. Energy Convers. 2004, 19, 441–448. [Google Scholar] [CrossRef]
- Dell, R.; Rand, D.A.J. Understanding Batteries; Royal Society of Chemistry: Cambridge, UK, 2001. [Google Scholar]
- Linden, D.; Reddy, T.B. Handbook of Batteries, 3rd ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Gamboa, G.; Hamilton, C.; Kerley, R.; Elmes, S.; Arias, A.; Shen, J.; Batarseh, I. Control strategy of a multi-port, grid connected, direct-DC PV charging station for plug-in electric vehicles. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1173–1177.
- El-hawary, M.E. The smart grid—State-of-the-art and future trends. Electr. Power Compon. Syst. 2014, 42, 239–250. [Google Scholar] [CrossRef]
- Ko, H.-S.; Jatskevich, J. Power quality control of wind-hybrid power generation system using fuzzy-LQR controller. IEEE Trans. Energy Convers. 2007, 22, 516–527. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Rating |
|---|---|
| AC Input Voltage | 600 V |
| System frequency | 50 Hz |
| Source Inductance | 26.5 mH |
| Transformer power rating | 15 kVA |
| Transformer primary voltage | 600 V |
| Transformer secondary voltage | 60 V |
| AC filter rating | 2 kVA |
| converter bridge rating | 15 KVA |
| DC current rating | 20 A |
| DC output voltage | 48 V |
| Parameter | Controller | Settling Time | Peak Overshot |
|---|---|---|---|
| DC Voltage | PI | 0.75 s | 24% |
| Fuzzy-PI | 0.25 s | 24% | |
| DC current | PI | 0.85 s | 33% |
| Fuzzy-PI | 0.25 s | 33% | |
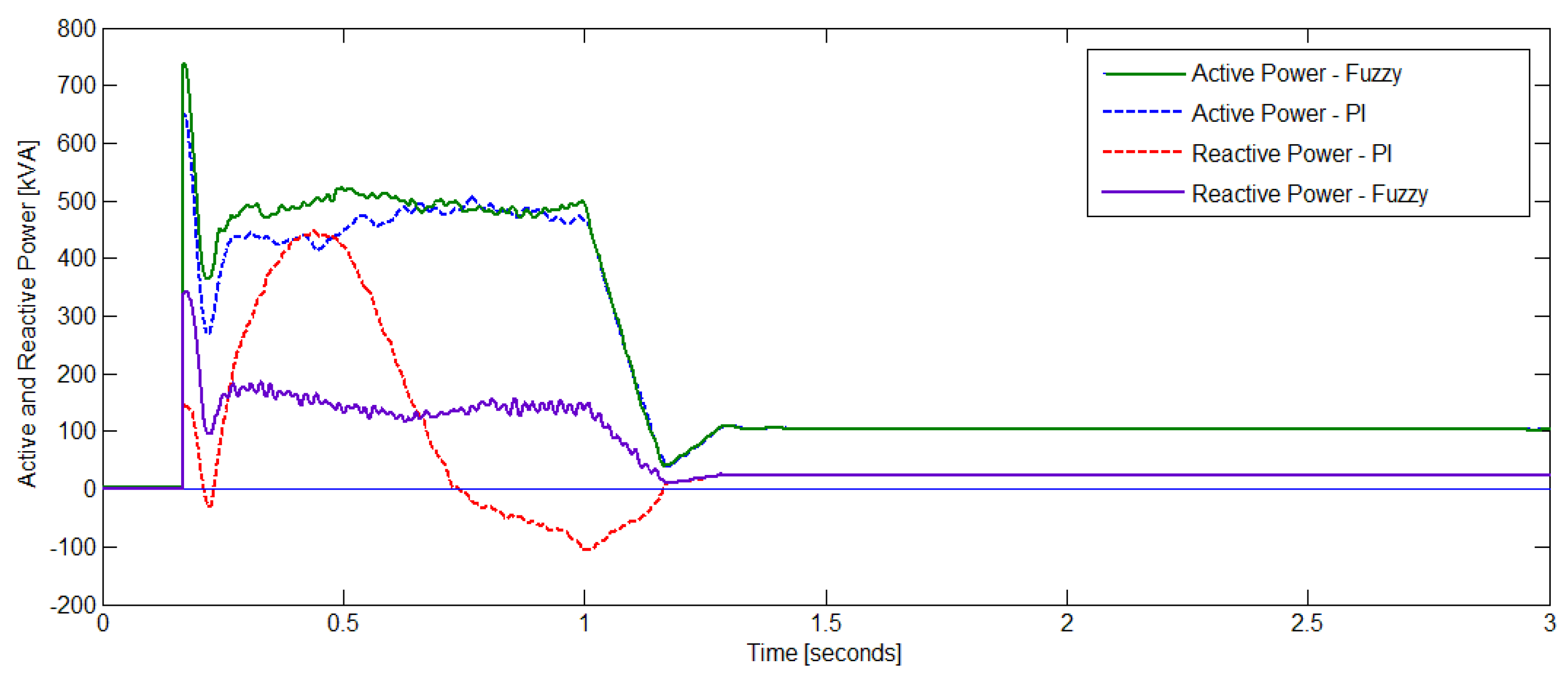
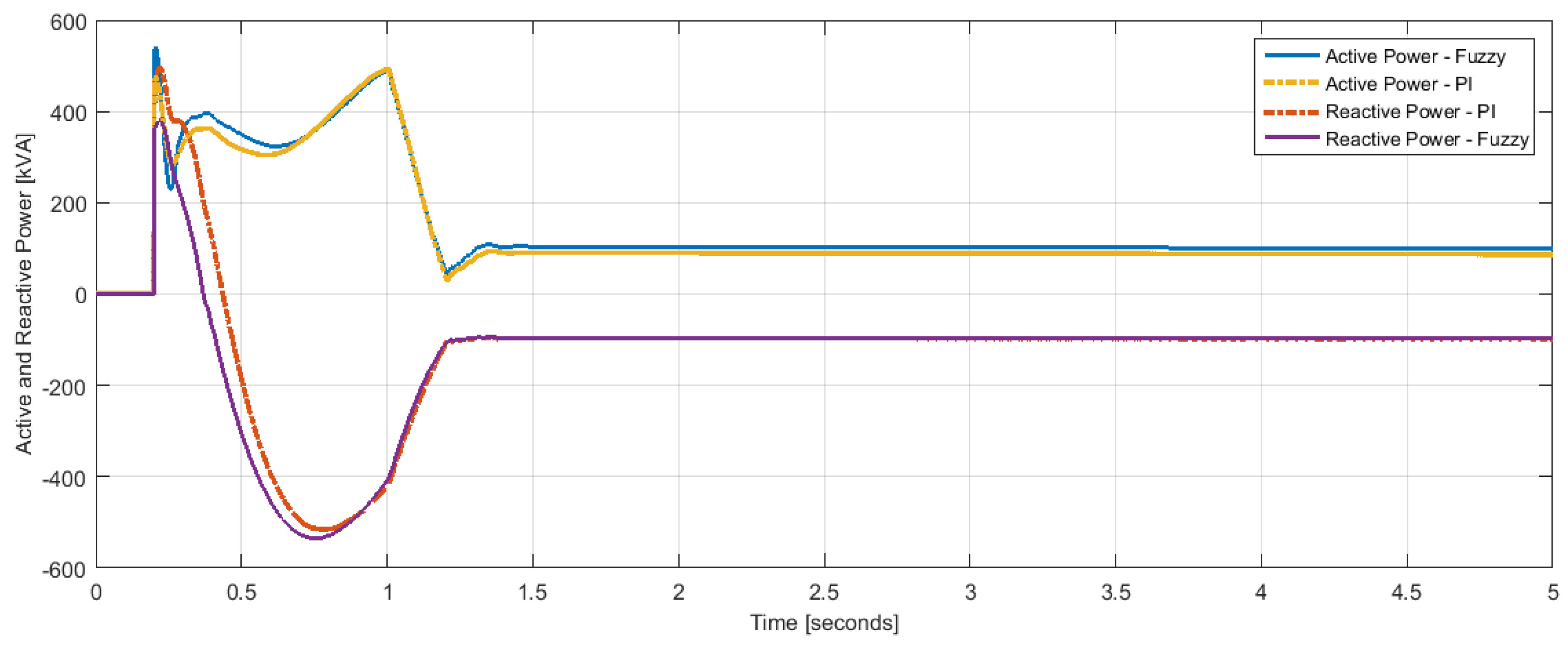
| Active power | PI | 0.76 s | 30% |
| Fuzzy-PI | 0.5 s | 40% | |
| Reactive power | PI | 1.2 s | 450% |
| Fuzzy-PI | 0.6 s | 300% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sayed, K.; Gabbar, H.A. Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller. Energies 2016, 9, 532. https://doi.org/10.3390/en9070532
Sayed K, Gabbar HA. Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller. Energies. 2016; 9(7):532. https://doi.org/10.3390/en9070532
Chicago/Turabian StyleSayed, Khairy, and Hossam A. Gabbar. 2016. "Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller" Energies 9, no. 7: 532. https://doi.org/10.3390/en9070532
APA StyleSayed, K., & Gabbar, H. A. (2016). Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller. Energies, 9(7), 532. https://doi.org/10.3390/en9070532