Optical Fiber Sensors for the Detection of Hydrochloric Acid and Sea Water in Epoxy and Glass Fiber-Reinforced Polymer Composites




Abstract
1. Introduction
2. Materials and Methods
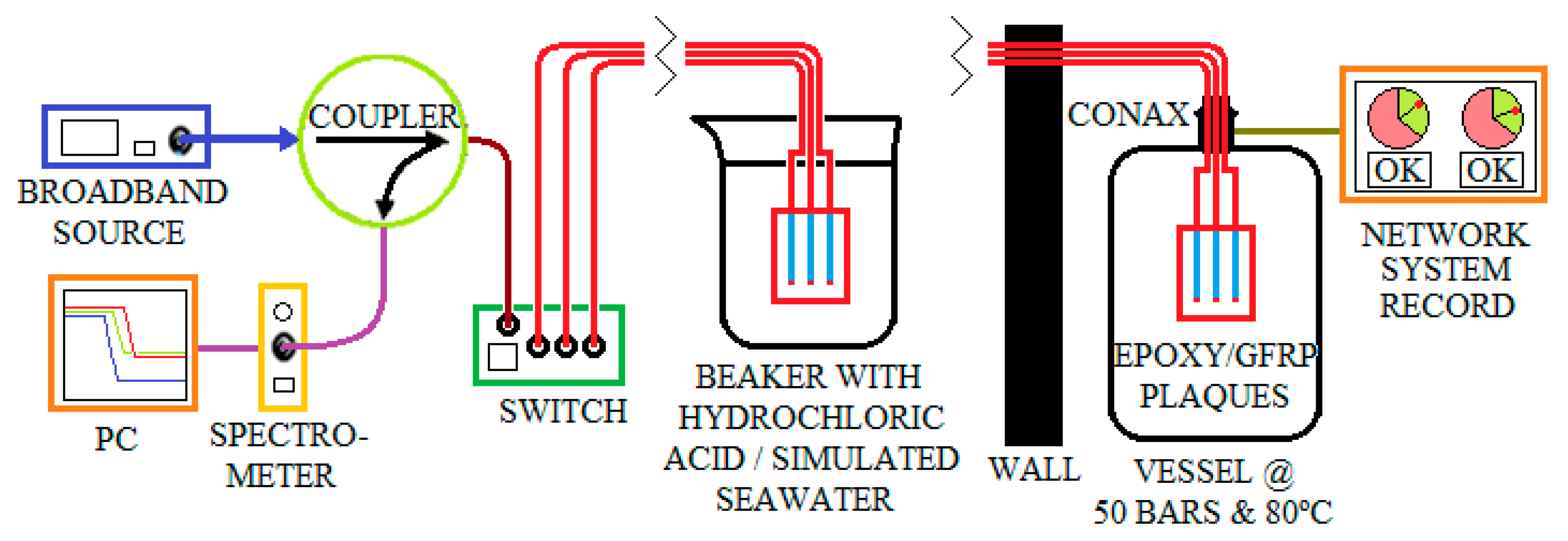
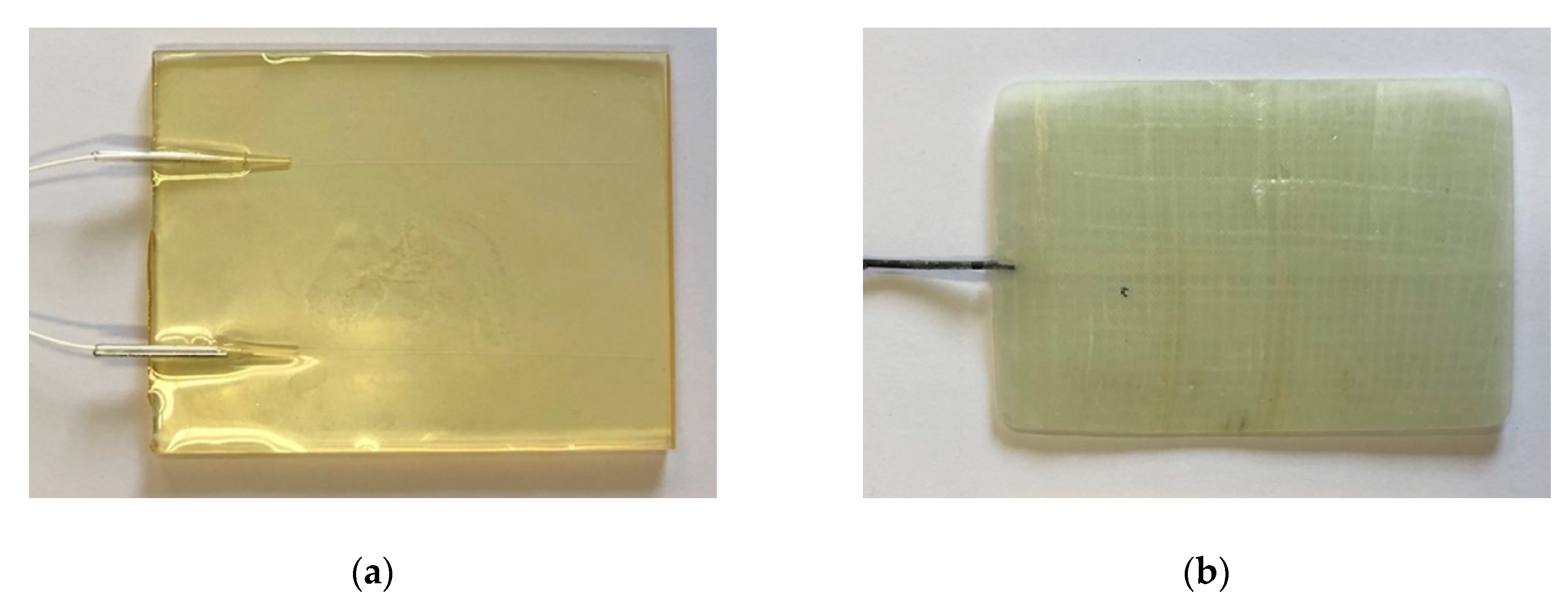
2.1. Fabrication of Optical Fiber Sensors, Their Embedding into Epoxy and GFRP and the Interrogation Setup
2.2. Mechanical Characterization of GFRP
3. Results and Discussion
3.1. Mechanical Properties
3.2. Characterization of Epoxy and GFRPs with Embedded OFSs in Artificial Sea Water at 80 °C
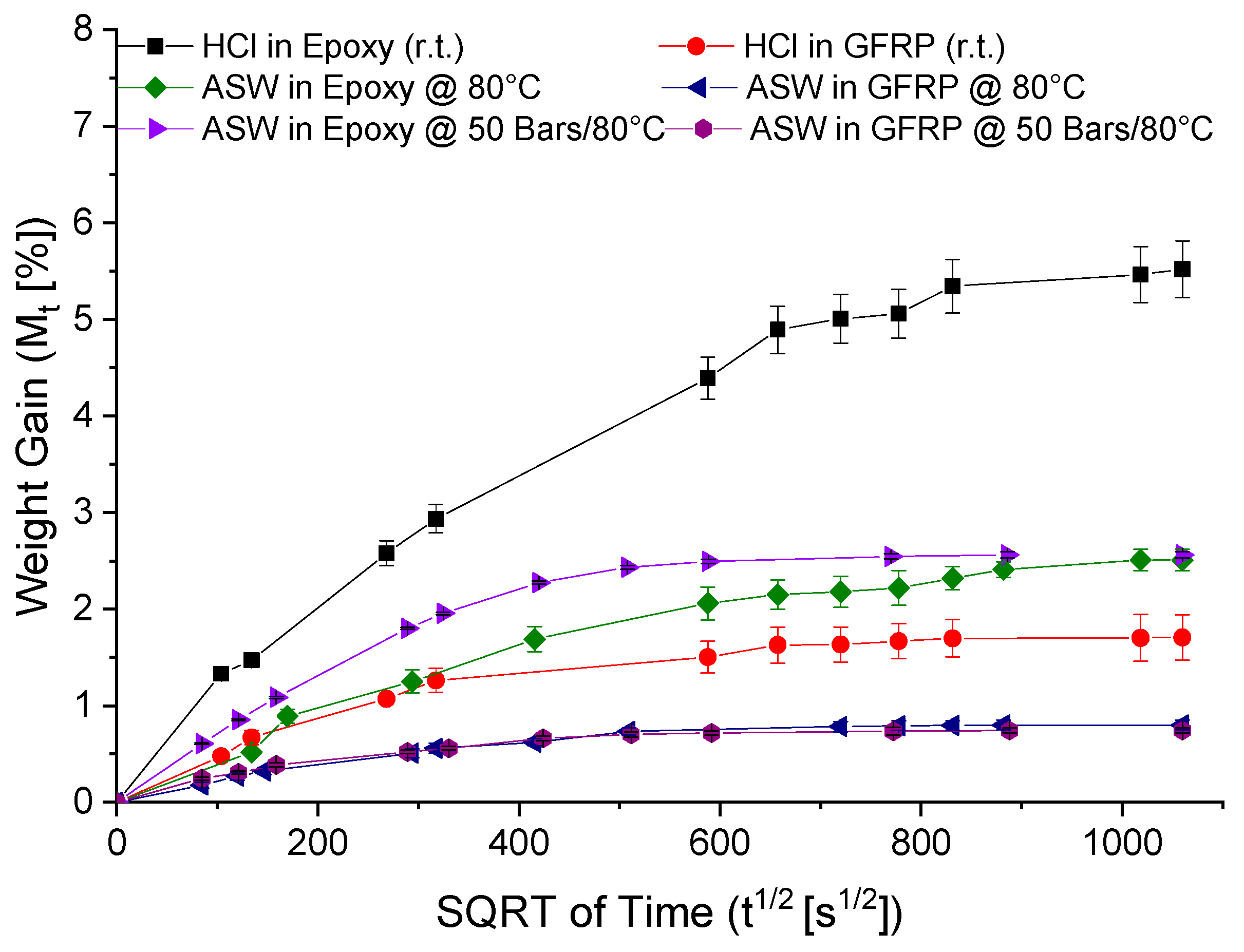
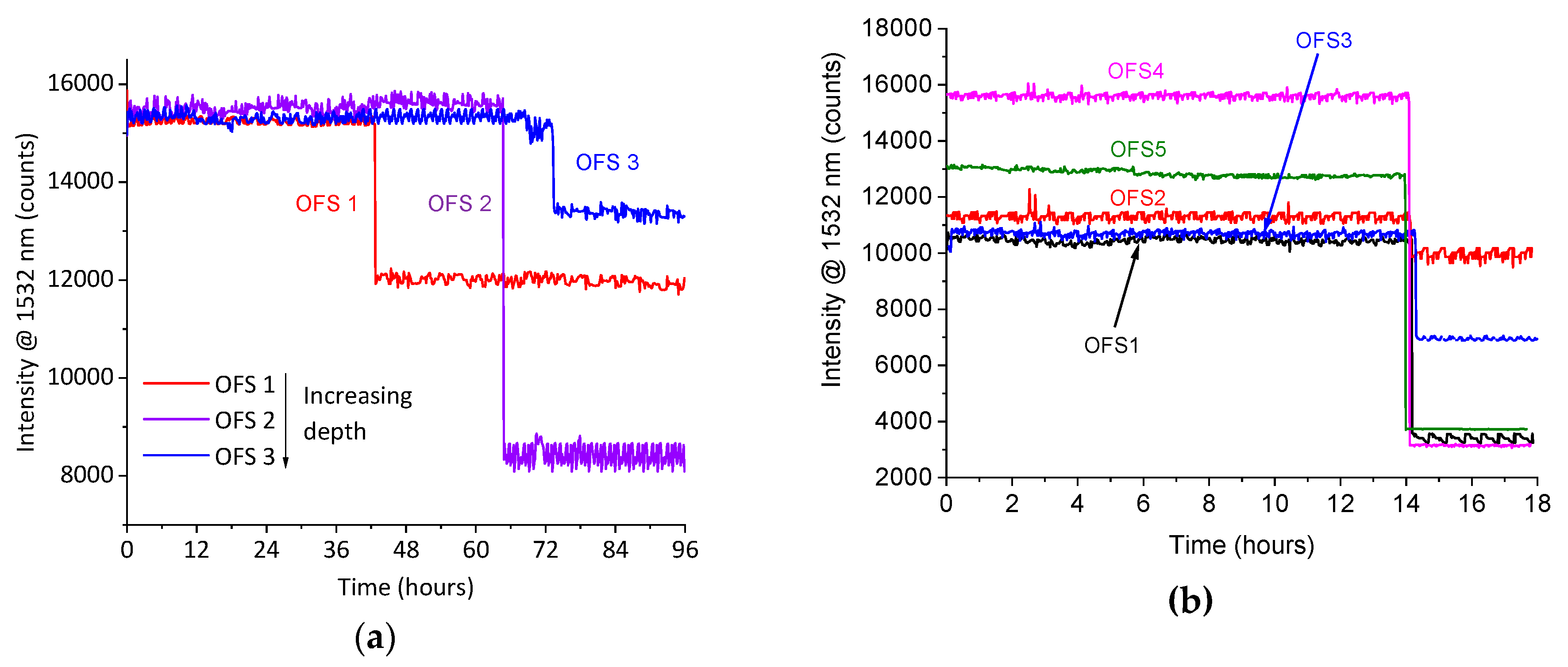
3.2.1. Gravimetric Measurements and Monitoring of Diffusion by Means of the Optical Fiber Sensors
3.2.2. High-Pressure Experiments
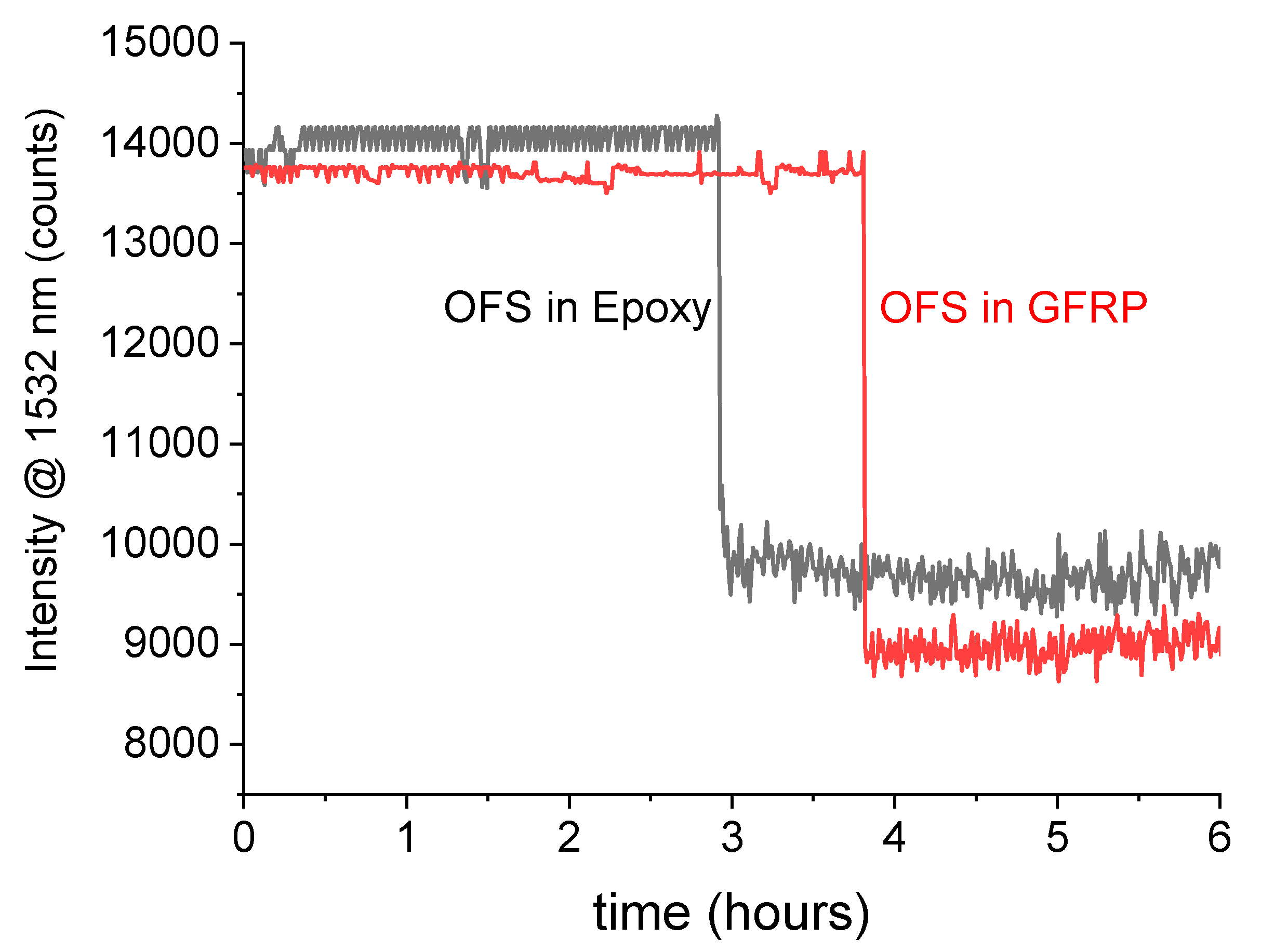
3.3. Hydrocloric Acid Detection
4. Conclusions
5. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Martin, R. Composite Materials: An Enabling Material for Offshore Piping Systems. In Proceedings of the Offshore Technology Conference, Huston, TX, USA, 6–9 May 2013; Offshore Technology Conference: Huston, TX, USA, 2013; pp. 1–26. [Google Scholar]
- Majumder, M.; Gangopadhyay, T.K.; Chakraborty, A.K.; Dasgupta, K.; Bhattacharya, D.K. Fibre Bragg gratings in structural health monitoring—Present status and applications. Sens. Actuators A Phys. 2008, 147, 150–164. [Google Scholar] [CrossRef]
- Kuang, K.S.C.; Kenny, R.; Whelan, M.P.; Cantwell, W.J.; Chalker, P.R. Embedded fibre Bragg grating sensors in advanced composite materials. Compos. Sci. Technol. 2001, 61, 1379–1387. [Google Scholar] [CrossRef]
- Olivero, M.; Perrone, G.; Vallan, A.; Tosi, D. Comparative Study of Fiber Bragg Gratings and Fiber Polarimetric Sensors for Structural Health Monitoring of Carbon Composites. Adv. Opt. Technol. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Yin, S.; Ruffin, P.B.; Yu, F.T.S. Fiber Optic Sensors; CRC Press: Boca Raton, FL, USA, 2008; ISBN 9781420053654. Available online: https://www.crcpress.com/Fiber-Optic-Sensors/Yin-Ruffin-Yu/p/book/9781420053654 (accessed on 22 November 2018).
- Milsom, B.; Olivero, M.; Milanese, D.; Giannis, S.; Martin, R.H.; Terenzi, A.; Kenny, J.; Ferraris, M.; Perrone, G.; Salvo, M. Glass optical fibre sensors for detection of through thickness moisture diffusion in glass reinforced composites under hostile environments. Adv. Appl. Ceram. 2015, 114, S76–S83. [Google Scholar] [CrossRef]
- Marro Bellot, C.; Olivero, M.; Sangermano, M.; Salvo, M. Towards smart polymer composites: Detection of moisture diffusion through epoxy by evanescent wave optical fibre sensors. Polym. Test. 2018, 71, 248–254. [Google Scholar] [CrossRef]
- Prabha, S.S.; Rathish, R.J.; Dorothy, R.; Brindha, G.; Pandiarajan, M.; Al-Hashem, A.; Rajendran, S. Corrosion Problems in Petroleum Industry and their solution. Eur. Chem. Bull. 2014, 3, 300–307. [Google Scholar] [CrossRef]
- Montazer, M.; Alimohammadi, F.; Shamei, A.; Rahimi, M.K. In situ synthesis of nano silver on cotton using Tollens reagent. Carbohydr. Polym. 2011, 87, 1706–1712. [Google Scholar] [CrossRef]
- Salvo, M.; Sangermano, M.; Marro Bellot, C.; Olivero, M. Optical Sensor, Process for Making Such Sensor and Evaluation System Comprising at Least One of Such Sensors. Patent Application 2018WO–IT00059, 24 April 2018. [Google Scholar]
- ASTM D1141-98(2013). Standard Practice for the Preparation of Substitute Ocean Water; ASTM International: West Conshohocken, PA, USA, 2013. [Google Scholar]
- Grammatikos, S.A.; Zafari, B.; Evernden, M.C.; Mottram, J.T.; Mitchels, J.M. Moisture uptake characteristics of a pultruded fibre reinforced polymer flat sheet subjected to hot/wet aging. Polym. Degrad. Stab. 2015, 121, 407–419. [Google Scholar] [CrossRef]
- ASTM D3039/D3039M-17. Standard Test Method for Tensile Properties of Polymer Matrix Composite Materials; ASTM International: West Conshohocken, PA, USA, 2017. [Google Scholar]
- ISO 14125: Fibre-reinforced Plastic Composites—Determination of Flexural Properties; ISO: Geneva, Switzerland, 1998.
- Lee, D.C.; Lee, J.J.; Yun, S.J. The mechanical characteristics of smart composite structures with embedded optical fiber sensors. Compos. Struct. 1995, 32, 39–50. [Google Scholar] [CrossRef]
- Grogan, D.; Flanagan, M.; Walls, M.; Leen, S.; Doyle, A.; Harrison, N.; Mamalis, D.; Goggins, J. Influence of microstructural defects and hydrostatic pressure on water absorption in composite materials for tidal energy. J. Compos. Mater. 2018, 52, 2899–2917. [Google Scholar] [CrossRef]
- Choqueuse, D.; Davies, P. Ageing of composites in underwater applications. Ageing Compos. 2008, 467–498. [Google Scholar]
- Le Gac, P.-Y.; Davies, P.; Choqueuse, D. Evaluation of Long Term Behaviour of Polymers for Offshore Oil and Gas Applications. Oil Gas Sci. Technol. Rev. d’IFP Energies Nouv. 2015, 70, 279–289. [Google Scholar] [CrossRef]
- Milsom, B.; Olivero, M.; Milanese, D.; Roseman, M.; Giannis, S.; Martin, R.; Terenzi, A.; Ferraris, M.; Salvo, M. Development and integration of innovative glass fibre sensors into advanced composites for applications in hostile environments. In Proceedings of the European conference on Composites Materials, Selville, Spain, 22–26 June 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tensile Test | Three-Point Bending Test | |||
|---|---|---|---|---|
| (MPa) | (GPa) | (MPa) | (GPa) | |
| GFRP | 367 ± 15 | 22 ± 5 | 364 ± 24 | 17 ± 1 |
| GFRP + OFSs | 356 ± 23 | 20 ± 3 | 368 ± 26 | 17 ± 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marro Bellot, C.; Sangermano, M.; Olivero, M.; Salvo, M. Optical Fiber Sensors for the Detection of Hydrochloric Acid and Sea Water in Epoxy and Glass Fiber-Reinforced Polymer Composites. Materials 2019, 12, 379. https://doi.org/10.3390/ma12030379
Marro Bellot C, Sangermano M, Olivero M, Salvo M. Optical Fiber Sensors for the Detection of Hydrochloric Acid and Sea Water in Epoxy and Glass Fiber-Reinforced Polymer Composites. Materials. 2019; 12(3):379. https://doi.org/10.3390/ma12030379
Chicago/Turabian StyleMarro Bellot, Cristian, Marco Sangermano, Massimo Olivero, and Milena Salvo. 2019. "Optical Fiber Sensors for the Detection of Hydrochloric Acid and Sea Water in Epoxy and Glass Fiber-Reinforced Polymer Composites" Materials 12, no. 3: 379. https://doi.org/10.3390/ma12030379
APA StyleMarro Bellot, C., Sangermano, M., Olivero, M., & Salvo, M. (2019). Optical Fiber Sensors for the Detection of Hydrochloric Acid and Sea Water in Epoxy and Glass Fiber-Reinforced Polymer Composites. Materials, 12(3), 379. https://doi.org/10.3390/ma12030379