Material Characterizations of Gr-Based Magnetorheological Elastomer for Possible Sensor Applications: Rheological and Resistivity Properties

 ,
,  , , , , ,
, , , , ,  , and
, and
Abstract
:1. Introduction
2. Experimental Methods
2.1. Materials
2.2. Gr-MRE Fabrication
2.3. Material Characterization
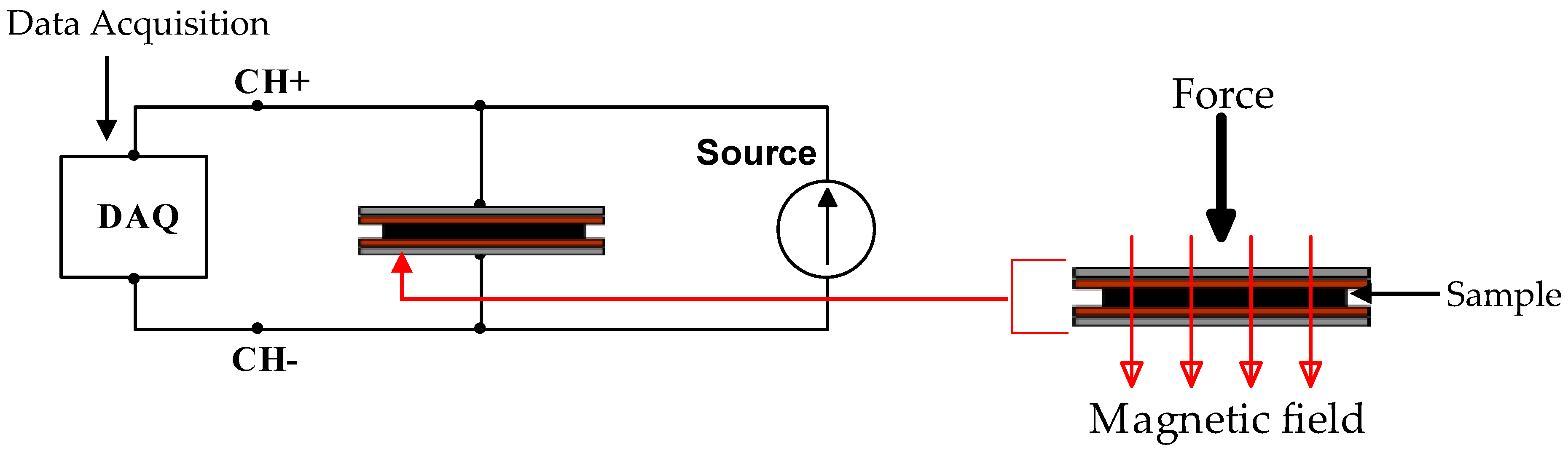
2.4. Rheological and Resistivity Properties
3. Results and Discussion
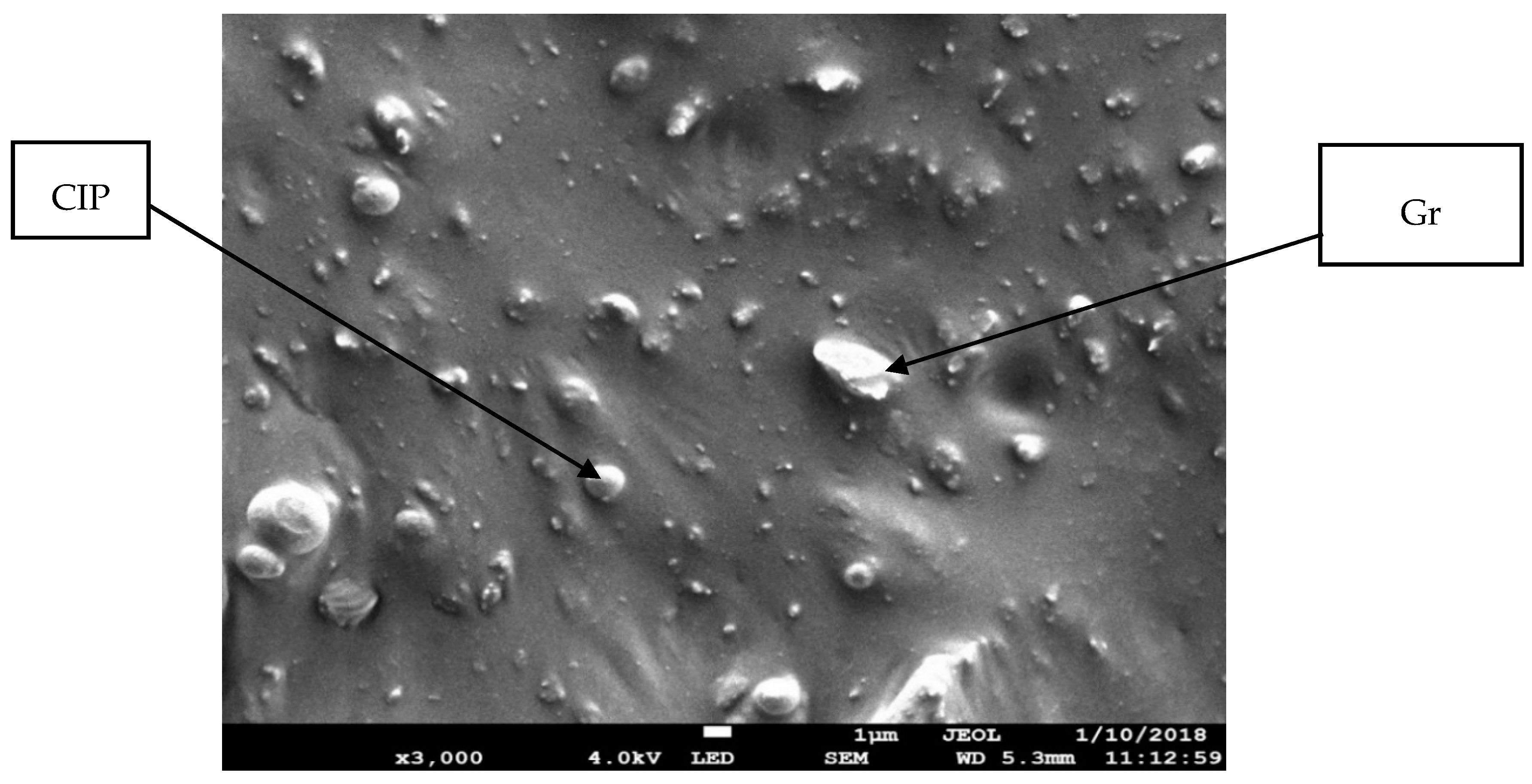
3.1. FESEM Characterization
3.1.1. The Effect of Gr on Storage Modulus
3.1.2. The Effect of Gr-MRE on Loss Factor
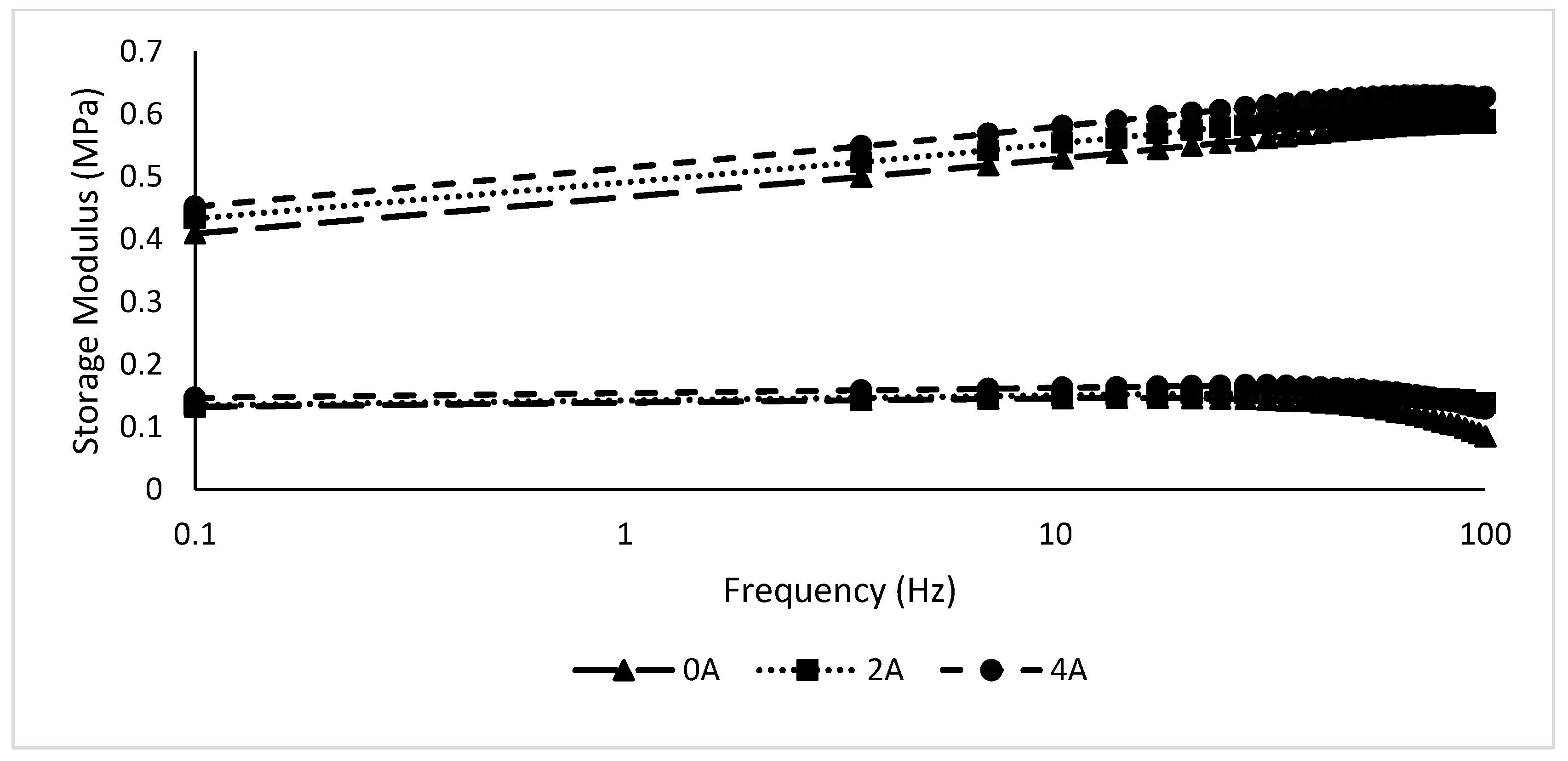
3.1.3. The Effect of Gr Presence in MRE on Frequency
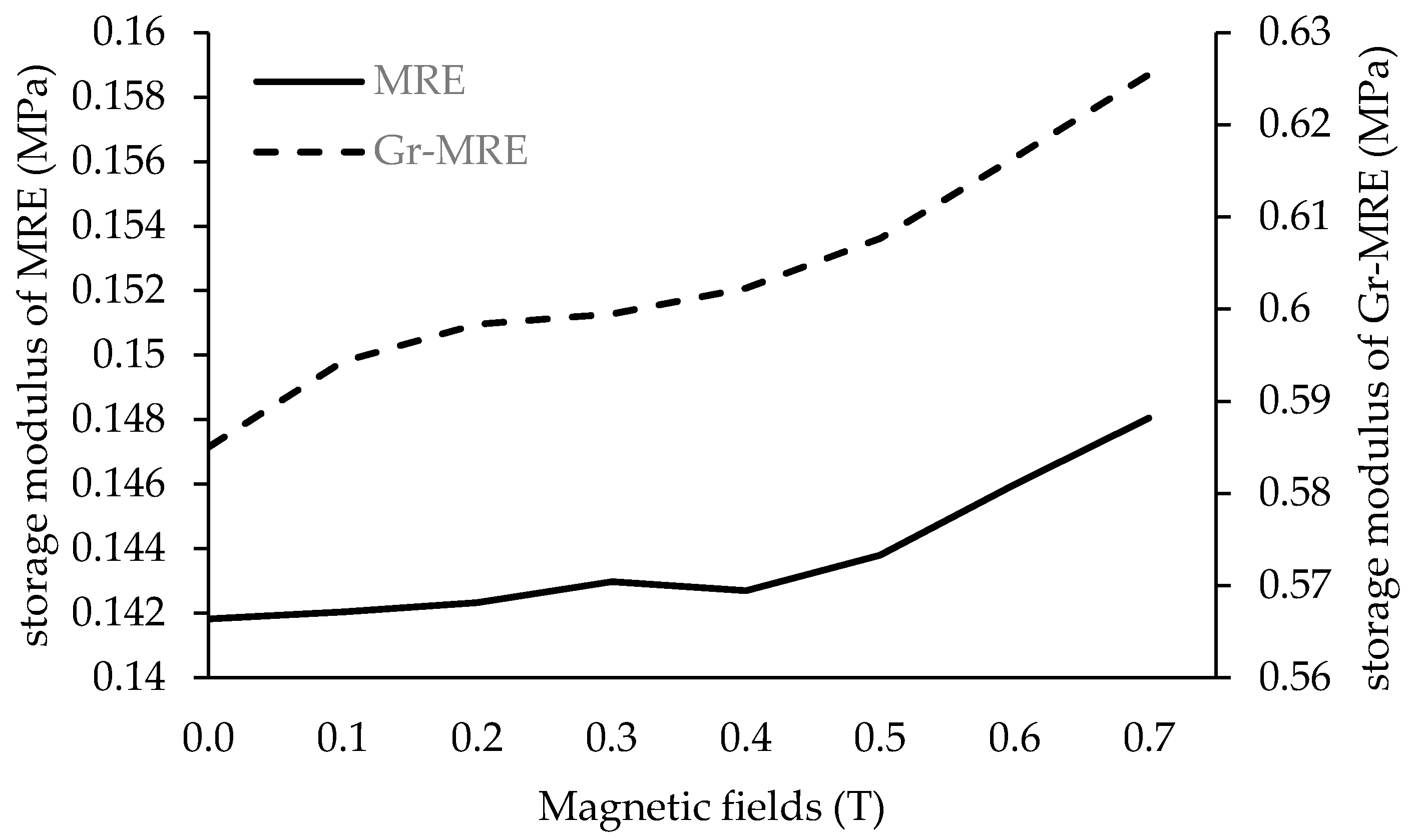
3.1.4. The Effect of Gr Presence in MRE on the MR Effect
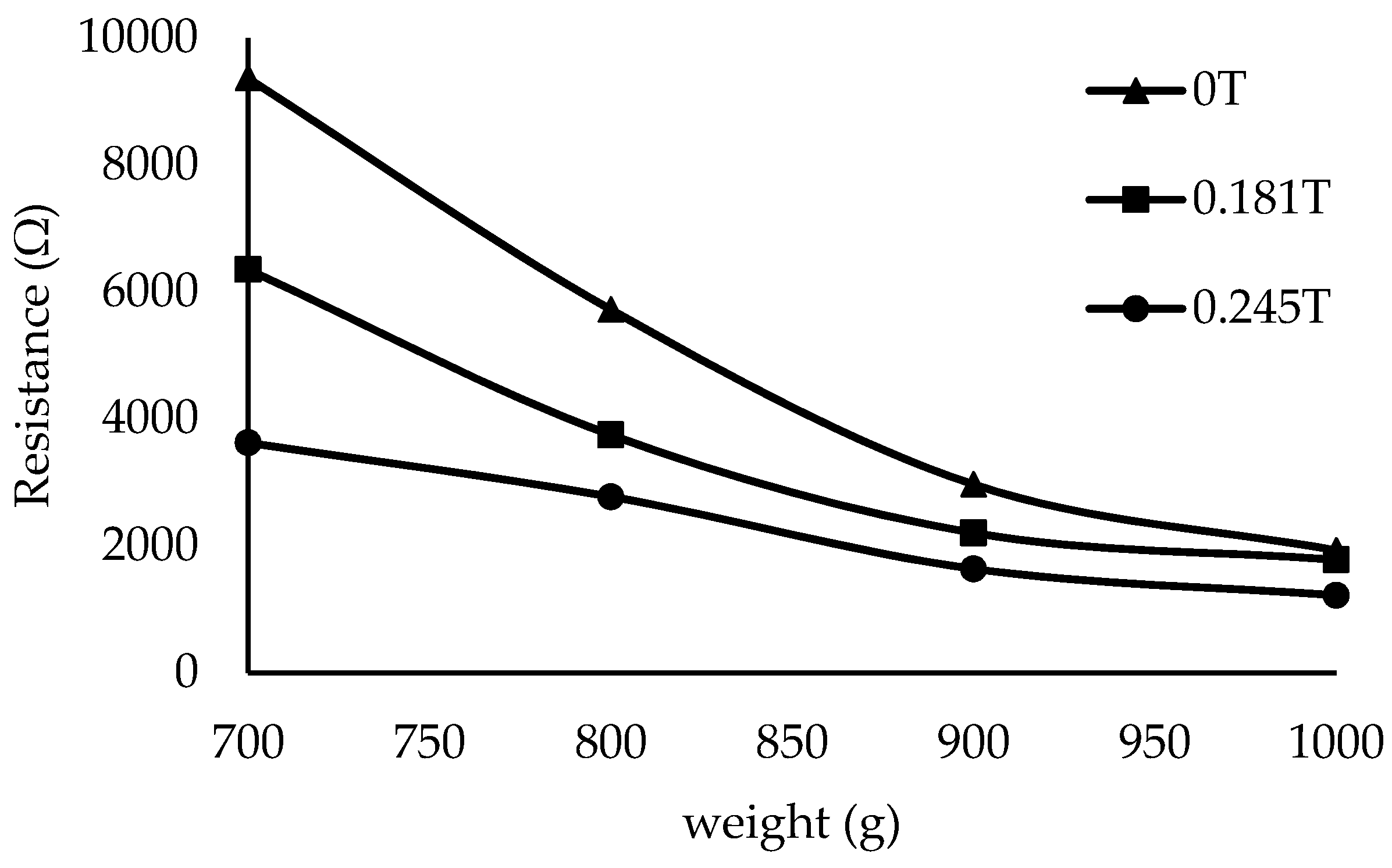
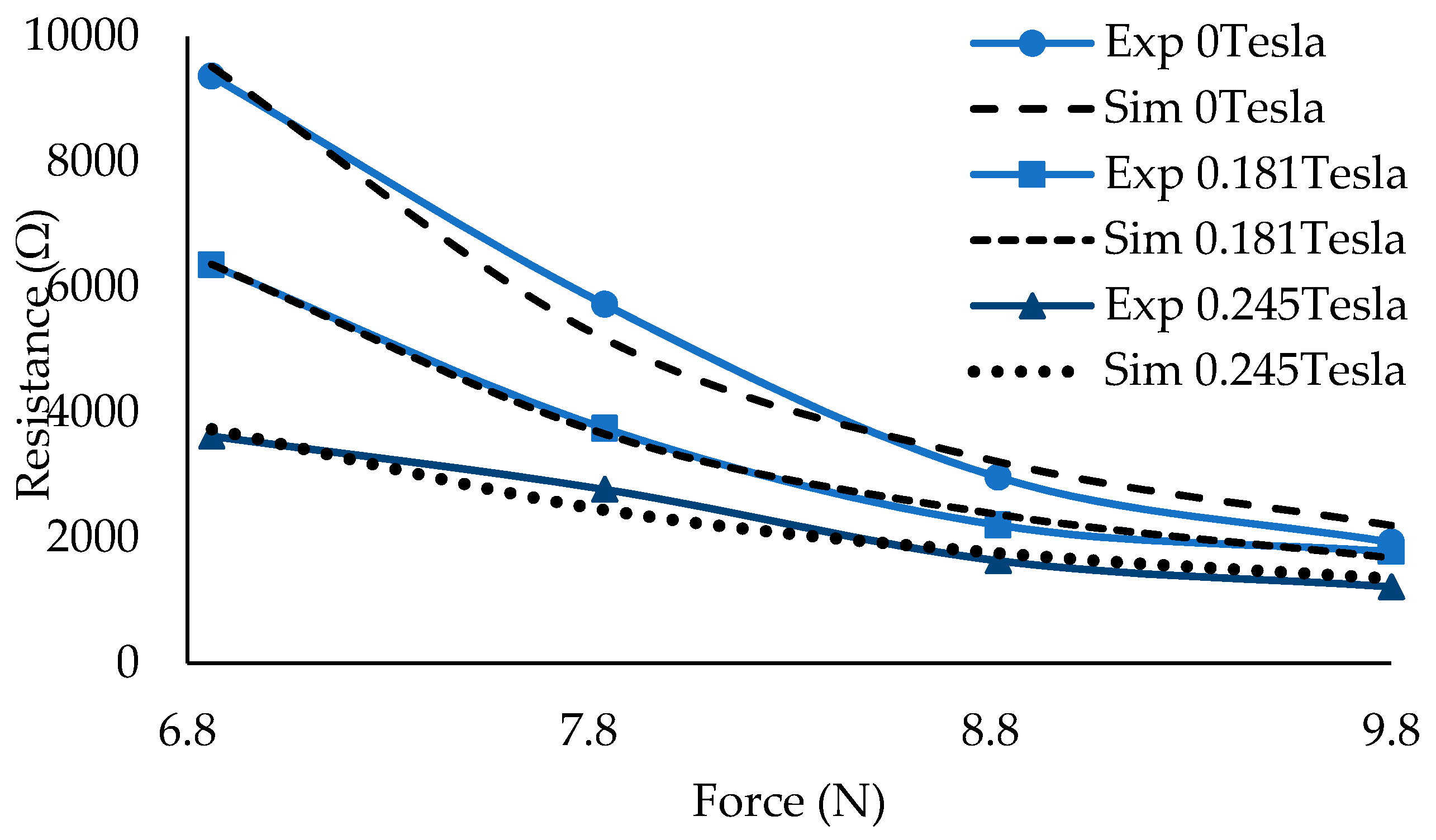
3.2. Resistivity Properties
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Gr-MRE | Gr-based magnetorheological elastomer |
| MR | Magnetorheological |
| MRE | Magnetorheological elastomer |
| MRF | Magnetorheological fluid |
| Oe | Oersted |
| Wt% | Weight percent |
| RTV | Room temperature vulcanized |
| CIPs | Carbonyl iron particles |
| SR | Silicone rubber |
| SO | Silicone oil |
| DMM | Digital multimeter |
| DAQ | Data acquisition |
References
- Gong, X.L.; Zhang, X.Z.; Zhang, P.Q. Fabrication and characterization of isotropic magnetorheological elastomers. Polym. Test. 2005, 24, 669–676. [Google Scholar] [CrossRef]
- Sutrisno, J.; Purwanto, A.; Mazlan, S.A. Recent progress on magnetorheological solids: Materials, fabrication, testing, and applications. Adv. Eng. Mater. 2015, 17, 563–597. [Google Scholar]
- Abdullateef, A.A.; Thomas, S.P.; Al-Harthi, M.A.; De, S.K.; Bandyopadhyay, S.; Basfar, A.A.; Atieh, M.A. Natural Rubber Nanocomposites with Functionalized Carbon Nanotubes: Mechanical, Dynamic Mechanical, and Morphology Studies. J. Appl. Polym. Sci. 2012, 125, E76–E84. [Google Scholar] [CrossRef]
- Li, R.; Sun, L.Z. Dynamic mechanical behavior of magnetorheological nanocomposites filled with carbon nanotubes. Appl. Phys. Lett. 2011, 99, 131912. [Google Scholar] [CrossRef]
- Aziz, S.A.A.; Mazlan, S.A.; Ismail, N.I.N.; Ubaidillah, U.; Choi, S.B.; Khairi, M.H.A.; Yunus, N.A. Effects of multiwall carbon nanotubes on viscoelastic properties of magnetorheological elastomers. Smart Mater. Struct. 2016, 25, 077001. [Google Scholar] [CrossRef]
- Antonel, P.S.; Oliveira, C.L.P.; Jorge, G.A.; Perez, O.E.; Leyva, A.G.; Negri, R.M. Synthesis and characterization of CoFe2O4 magnetic nanotubes, nanorods and nanowires. Formation of magnetic structured elastomers by magnetic field-induced alignment of CoFe2O4 nanorods. J. Nanopart. Res. 2015, 17, 294. [Google Scholar] [CrossRef]
- Zou, H.; Zhang, L.; Tian, M.; Wu, S.; Zhao, S. Study on the structure and properties of conductive silicone rubber filled with nickel-coated graphite. J. Appl. Polym. Sci. 2009, 115, 2710–2717. [Google Scholar] [CrossRef]
- Bica, I.; Anitas, E.M.; Bunoiu, M.; Vatzulik, B.; Juganaru, I. Hybrid magnetorheological elastomer: Influence of magnetic field and compression pressure on its electrical conductivity. J. Ind. Eng. Chem. 2014, 20, 3994–3999. [Google Scholar] [CrossRef]
- Yu, M.; Yang, P.; Fu, J.; Liu, S.; Choi, S.B. A theoretical model for the field-dependent conductivity of magneto-rheological gels and experimental verification. Sens. Actuators A Phys. 2016, 245, 127–134. [Google Scholar] [CrossRef]
- Ge, L.; Gong, X.; Wang, Y.; Xuan, S. The conductive three dimensional topological structure enhanced magnetorheological elastomer towards a strain sensor. Compos. Sci. Technol. 2016, 135, 92–99. [Google Scholar] [CrossRef]
- Schümann, M.; Morich, J.; Kaufhold, T.; Böhm, V.; Zimmermann, K.; Odenbach, S. A mechanical characterisation on multiple timescales of electroconductive magnetorheological elastomers. J. Magn. Magn. Mater. 2018, 453, 198–205. [Google Scholar] [CrossRef]
- Hreljac, A.; Marshall, R.N. Algorithms to determine event timing during normal walking using kinematic data. J. Biomech. 2000, 33, 783–786. [Google Scholar] [CrossRef]
- Hanlon, M.; Anderson, R. Real-time gait event detection using wearable sensors. Gait Posture 2009, 30, 523–527. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Cao, C.; Huang, J.; Pan, W. Human moving pattern recognition toward channel number reduction based on multipressure sensor network. Int. J. Distrib. Sens. Netw. 2013, 9, 510917. [Google Scholar] [CrossRef]
- Tian, T.F.; Li, W.H.; Alici, G.; Du, H.; Deng, Y.M. Microstructure and magnetorheology of graphite-based MR elastomers. Rheol. Acta 2011, 50, 825–836. [Google Scholar] [CrossRef]
- Moucka, R.; Sedlacik, M.; Cvek, M.; Moucka, R.; Sedlacik, M.; Cvek, M. Dielectric properties of magnetorheological elastomers with different microstructure. Appl. Phys. Lett. 2018, 12, 122901. [Google Scholar] [CrossRef]
- Moučka, R.; Sedlačík, M.; Kutálková, E. Magnetorheological Elastomers: Electric Properties versus Microstructure. AIP Conf. Proc. 2018, 020017. [Google Scholar] [CrossRef]
- Li, W.; Kostidis, K.; Zhang, X.; Zhou, Y. Development of a Force Sensor Working with MR Elastomers. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 233–238. [Google Scholar]
- Nippon Steel. Nippon Steel Technical Bulletin ns625tds. Available online: http://www.yureka.com.my/file/Technical%20Specs%20PDF/ns%20625%20tds.pdf (accessed on 9 September 2017).
- Li, W.H.; Zhang, X.Z.; Du, H. Magnetorheological elastomers and their applications. Adv. Elastomers 2013, 12, 357–374. [Google Scholar]
- Sengupta, R.; Bhattacharya, M.; Bandyopadhyay, S.; Bhowmick, A.K. A review on the mechanical and electrical properties of graphite and modified graphite reinforced polymer composites. Prog. Polym. Sci. 2011, 36, 638–670. [Google Scholar] [CrossRef]
- Ponnammaa, S.T.D.; Sadasivunib, K.K.; Grohensc, Y.; Guod, Q. Carbon Nanotubes based Elastomer Composites—An Approach towards Multifunctional Materials. J. Mater. Chem. C 2014, 2, 8446–8485. [Google Scholar] [CrossRef]
- Inam, F.; Wong, D.W.Y.; Kuwata, M.; Peijs, T. Multiscale Hybrid Micro-Nanocomposites Based on Carbon Nanotubes and Carbon Fibers. J. Nanomater. 2010, 2010. [Google Scholar] [CrossRef]
- Guth, E. Theory of filler reinforcement. J. Appl. Phys. 1945, 16, 20–25. [Google Scholar] [CrossRef]
- Choi, H.J.; Mazlan, S.A.; Imaduddin, F. Fabrication and viscoelastic characteristics of waste tire rubber based magnetorheological elastomer. Smart Mater. Struct. 2016, 25, 1–14. [Google Scholar]
- Boczkowska, A.; Awietj, S. Microstructure and Properties of Magnetorheological Elastomers. Adv. Elastomers Technol. Prop. Appl. 2012. [Google Scholar] [CrossRef] [Green Version]
- Jung, H.S.; Kwon, S.H.; Choi, H.J.; Jung, J.H.; Kim, G. Magnetic Carbonyl Iron / Natural Rubber Composite Elastomer and Its Magnetorheology. Compos. Struct. 2015, 136, 106–112. [Google Scholar] [CrossRef]
- Tian, T.F.; Li, W.H.; Deng, Y.M. Sensing capabilities of graphite based MR elastomers. Smart Mater. Struct. 2011, 20, 025022. [Google Scholar] [CrossRef]
- Bahiuddin, I.; Mazlan, S.A.; Shapiai, I.; Imaduddin, F.; Choi, S.B. Constitutive models of magnetorheological fluids having temperature-dependent prediction parameter. Smart Mater. Struct. 2018, 27, 95001. [Google Scholar] [CrossRef] [Green Version]
- Yunus, N.A.; Mazlan, S.A.; Choi, S.B.; Imaduddin, F.; Aziz, S.A.A.; Khairi, M.H.A. Rheological properties of isotropic magnetorheological elastomers featuring an epoxidized natural rubber. Smart Mater. Struct. 2016, 25, 1–11. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compound Elements | Weights (g) | wt % |
|---|---|---|
| Carbonyl iron (6 µm) | 12.5 | 21 |
| Silicon rubber | 22.5 | 37 |
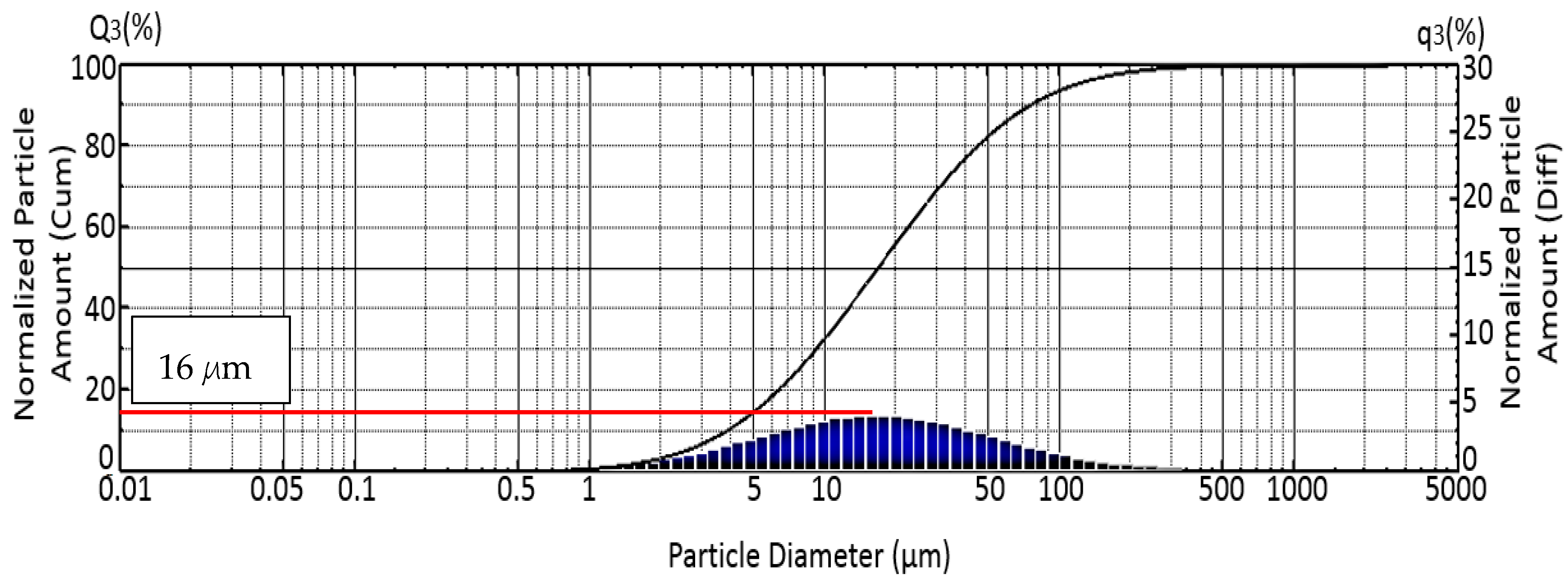
| Gr (16 µm) | 20 | 33 |
| Silicone oil | 5 | 9 |
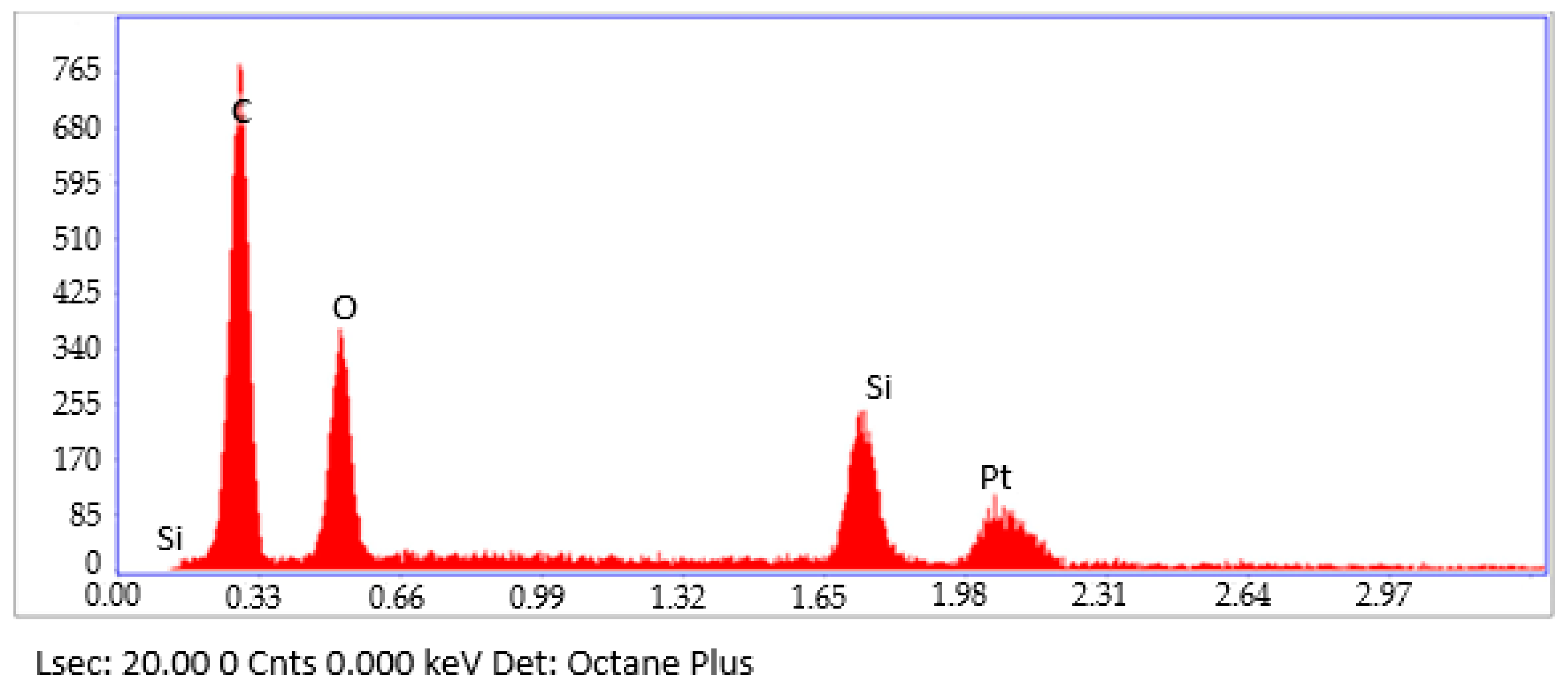
| Element | Weight (%) | Atomic (%) |
|---|---|---|
| C | 34.35 | 60.80 |
| O | 15.31 | 20.34 |
| Si | 20.64 | 15.62 |
| Pt | 29.71 | 3.24 |
| Samples | G′0 | G′max | ΔG′ | MR Effect |
|---|---|---|---|---|
| Conventional MRE (CIP: 20 wt %) | 0.1418 | 0.1482 | 0.0064 | 4.5% |
| Gr-MRE (Tian et al. [15]) (CIP: 47.61 wt %) | 2.6% | |||
| Gr-MRE (CIP: 20 wt %) | 0.5850 | 0.6272 | 0.0422 | 7.2% |
| (Ω) | (N) | RMSE (Ω) | R2 | |
|---|---|---|---|---|
| 0 | 72.16 | 33.49 | 340.52 | 0.986 |
| 0.181 | 75.52 | 30.42 | 109.24 | 0.996 |
| 0.214 | 90.29 | 28.14 | 144.56 | 0.991 |
| 0.245 | 126.14 | 23.24 | 195.17 | 0.957 |
| 0.312 | 177.97 | 18.24 | 44.54 | 0.993 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shabdin, M.K.; Abdul Rahman, M.A.; Mazlan, S.A.; Ubaidillah; Hapipi, N.M.; Adiputra, D.; Abdul Aziz, S.A.; Bahiuddin, I.; Choi, S.-B. Material Characterizations of Gr-Based Magnetorheological Elastomer for Possible Sensor Applications: Rheological and Resistivity Properties. Materials 2019, 12, 391. https://doi.org/10.3390/ma12030391
Shabdin MK, Abdul Rahman MA, Mazlan SA, Ubaidillah, Hapipi NM, Adiputra D, Abdul Aziz SA, Bahiuddin I, Choi S-B. Material Characterizations of Gr-Based Magnetorheological Elastomer for Possible Sensor Applications: Rheological and Resistivity Properties. Materials. 2019; 12(3):391. https://doi.org/10.3390/ma12030391
Chicago/Turabian StyleShabdin, Muhammad Kashfi, Mohd Azizi Abdul Rahman, Saiful Amri Mazlan, Ubaidillah, Norhiwani Mohd Hapipi, Dimas Adiputra, Siti Aishah Abdul Aziz, Irfan Bahiuddin, and Seung-Bok Choi. 2019. "Material Characterizations of Gr-Based Magnetorheological Elastomer for Possible Sensor Applications: Rheological and Resistivity Properties" Materials 12, no. 3: 391. https://doi.org/10.3390/ma12030391