Anisotropic Vector Hysteresis Simulation of Soft Magnetic Composite Materials Based on a Hybrid Algorithm of PSO–Powell

Abstract
:1. Introduction
2. Material and Methods
2.1. Material
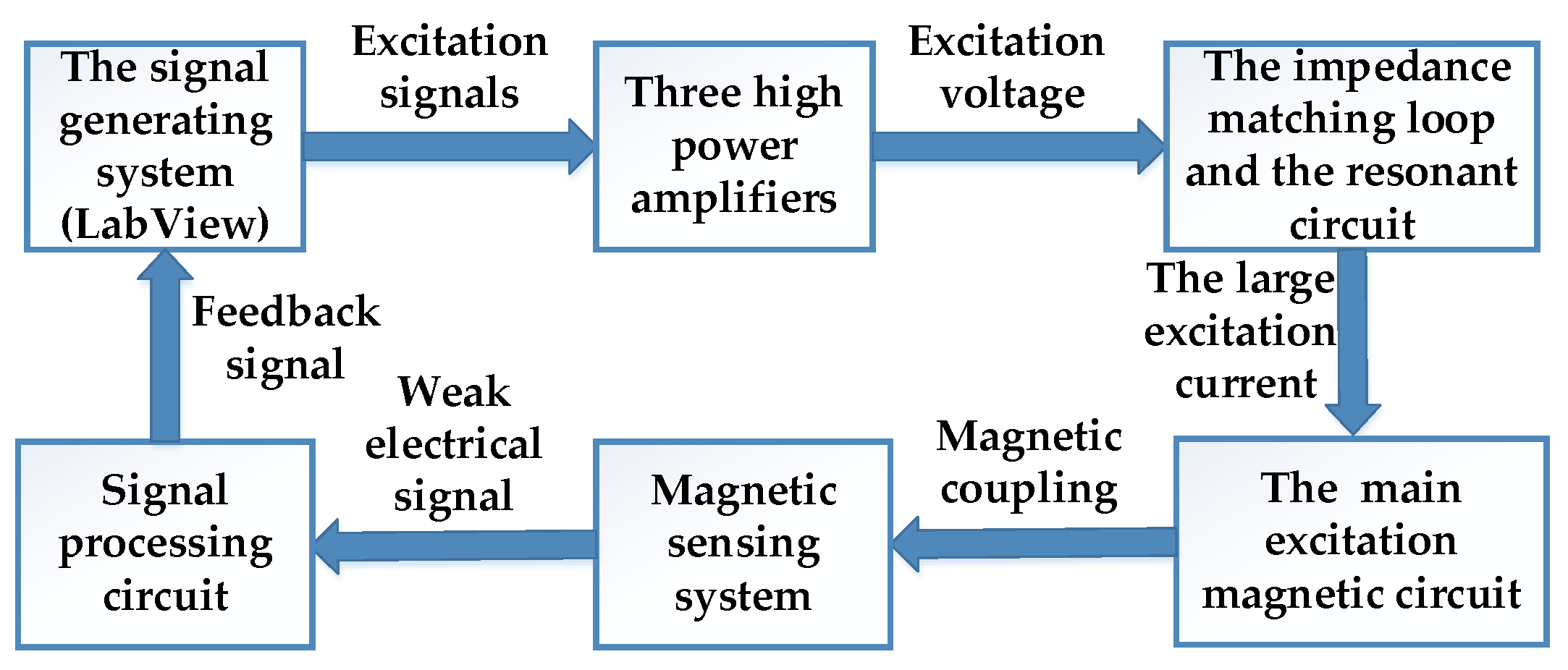
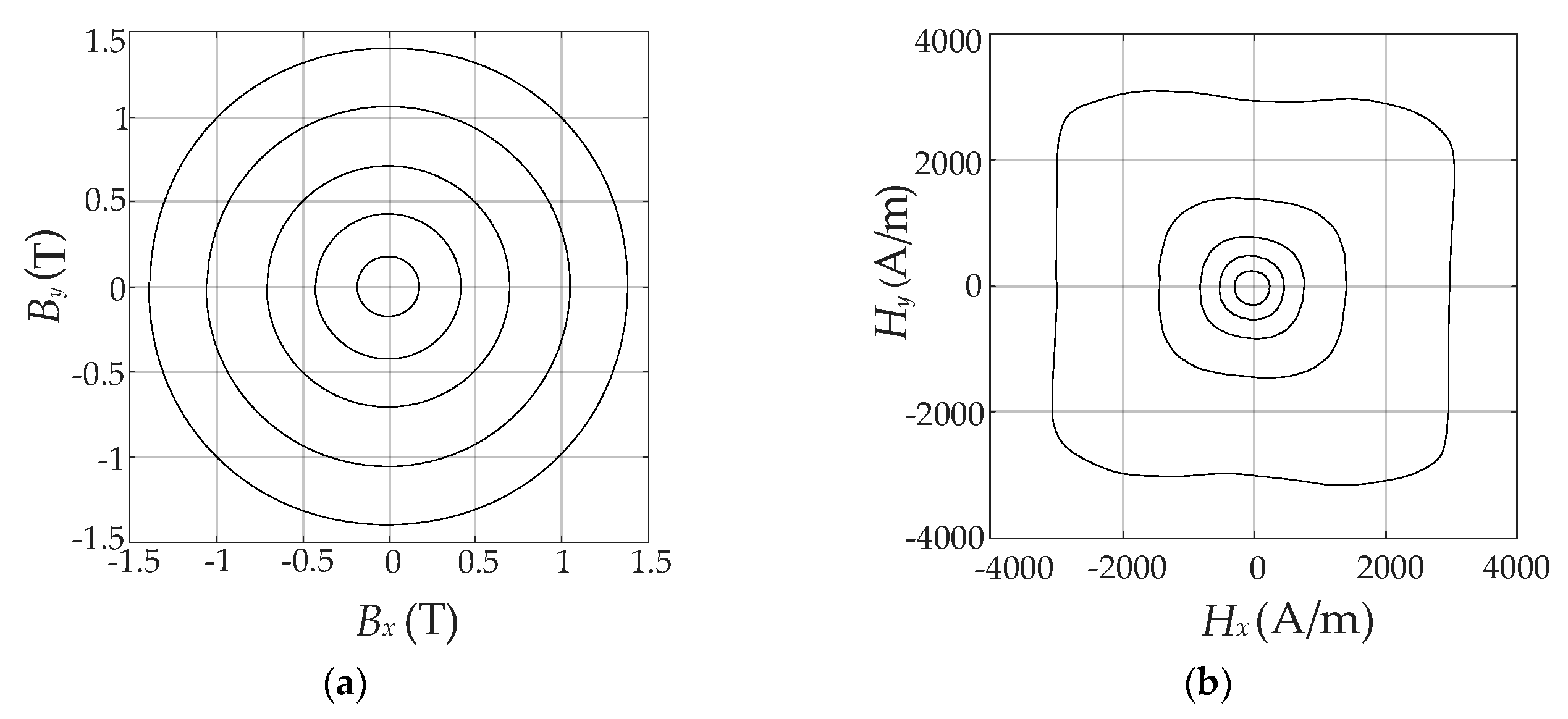
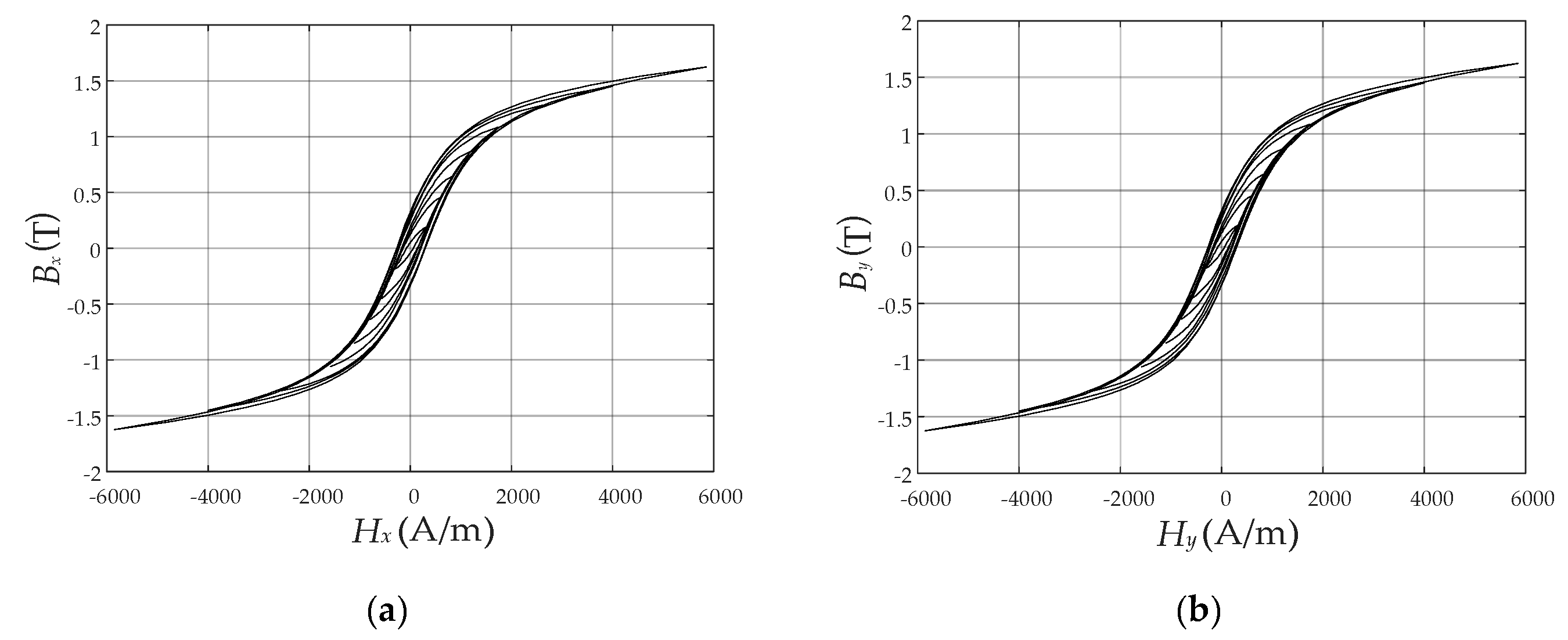
2.2. Vector Hysteresis Measurement of SMC Material
2.3. Hysteresis Modeling Based on Improved Preisach Model
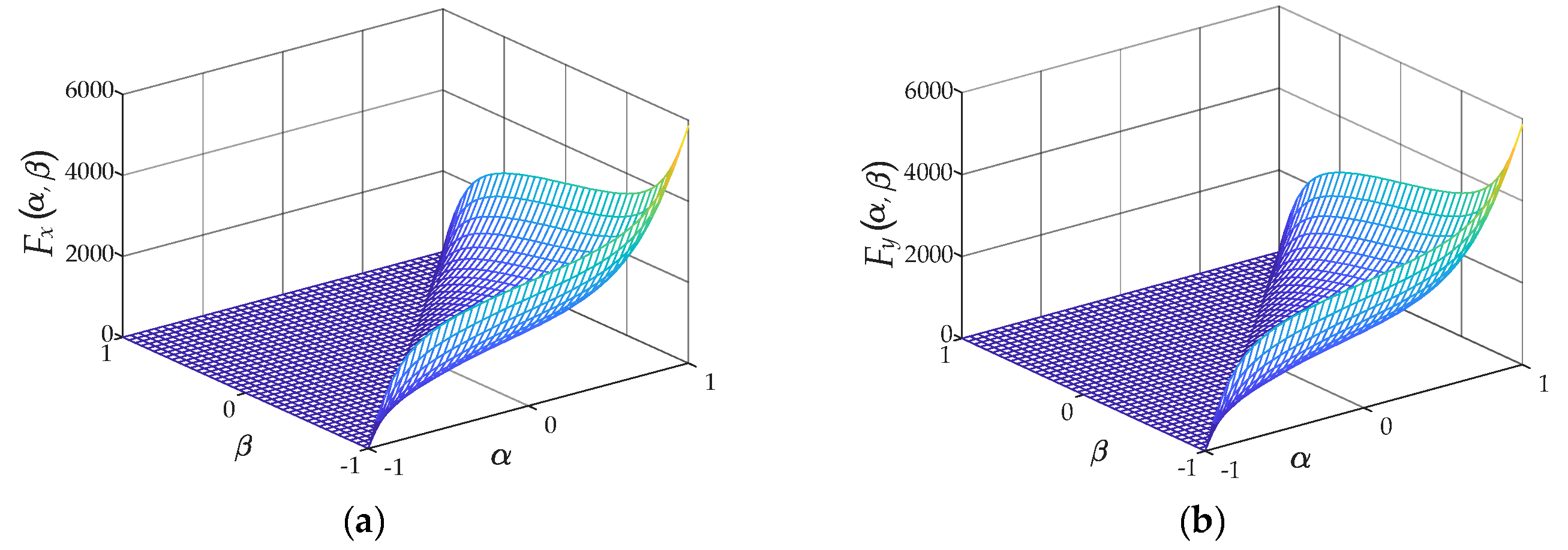
2.3.1. Improved Vector Preisach Model Based on Classical Model
2.3.2. Identification Procedure of Improved Vector Preisach Model
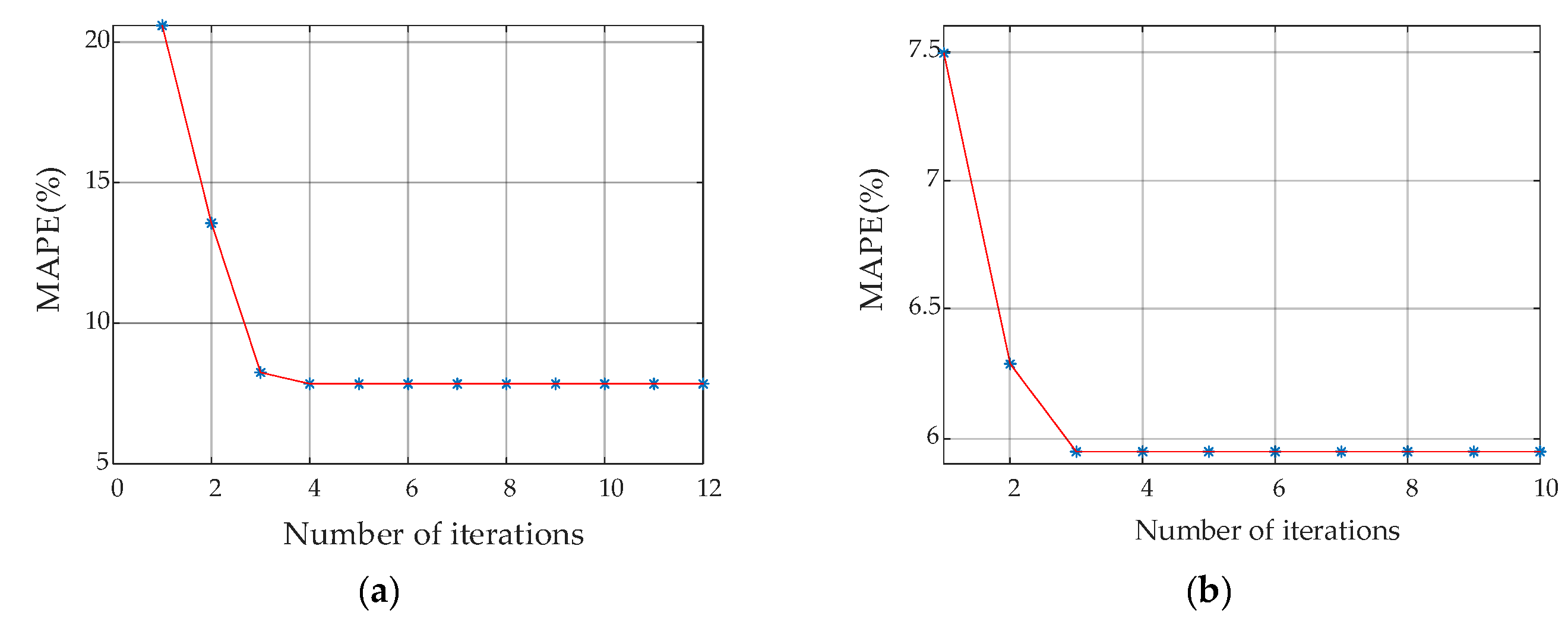
2.3.3. Parameter Extraction of Improved Model Based on Hybrid Optimization Algorithm
- (1)
- Set the parameters of the PSO algorithm. The particle number N, the acceleration factors c1 and c2, the inertia factor ω, the maximum number of iterations T and the initial iteration number k are set to 5, 0.3, 0.3, 1, 100 and 1 respectively.
- (2)
- Initialize the population. The position X(wi0, zi0) of each initial particle i is generated randomly within wi0 ϵ [0.5,1], zi0 ϵ [1,1.5]; the range of the initial particles’ velocity Vi0 ϵ [Vmin, Vmax] is set to [0,0.3].
- (3)
- Calculate the objective function fi0 of each initial particle to obtain the historical optimal position Pi0 = Xi0 and the global optimal position Pg0 = P(wg0, zg0).
- (4)
- Update the particle velocity Vik and position Xik by Pik−1 and Pgk−1where r1 and r2 are generated randomly within the interval of [0,1].
- (5)
- Evaluate the fik of each particle and update the historical optimal position Pik of each particle as well as global optimal objective position Pgk as followswhere fgk is the global optimal objective function at the kth iteration.
- (6)
- Determine whether the switching criteria as Inequation (21) is satisfied. If satisfied, the current optimal solution Pgk= P(wgk, zgk), and the corresponding objective function fgk, are transferred to the Powell algorithm and the calculation process is ended. Otherwise, set k = k + 1 and repeat from step (3).where = 0.01. n0 is the number of consecutive iterations, and was set to 10 in this paper.
- (1)
- Initial the basic point of the Powell algorithm: x0(1) = x(0) = x(w(0), z(0)) = P(wgk, zgk).
- (2)
- Set the parameters of the Powell algorithm: the iteration accuracy e, the initial direction S1(1), S2(1), and the initial iteration number t, are set to 0.001, (1,0), (0,1) and 1, respectively.
- (3)
- Basic search: start from x0(t) and do a 1-D search along S1(t) and S2(t) to obtain the extreme points x1(t) and x2(t) for f.
- (4)
- Accelerated search: start from x0(t), perform a 1-D search along the conjugate direction S(t) = x2(t) - x0(t) to get the extreme point x3(t).
- (5)
- Determine whether the termination condition as Inequality (22) is met. If satisfied, the current optimal solution x* = x3(t) = x(w3(t), z3(t)), and the corresponding optimal value f(x*), are obtained. Otherwise, go to step (6).
- (6)
- Calculate the maximum drop of f and the corresponding direction Sm(t) as follows.Calculate the mapping point xmap(t) = 2x2(t) − x0(t) along direction S(t) and set f1 = f(x0(t)), f2 = f(x2(t)), f3 = f(xmap(t)). Update the initial point x0(t + 1) = x3(t) and the search direction Sm(t) = S(t) if the Powell condition is satisfied as Inequality (24), and then repeat from step (3). Otherwise, go to step (7).
- (7)
- Update the initial point: x0(t + 1) = x2(t) if . Otherwise, update the initial point: x0(t + 1) = xmap(t). Set t = t + 1 and repeat from step (3).
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhu, J.; Guo, Y.; Lin, Z.; Zhong, J. Measurement and modeling of SMC materials under vector magnetizations. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; Volume 3, pp. 2354–2359. [Google Scholar]
- Guo, Y.; Zhu, J.; Watterson, P.A.; Wu, W. Development of a PM transverse flux motor with soft magnetic composite core. IEEE Trans. Energy Convers. 2006, 21, 426–434. [Google Scholar] [CrossRef]
- Coulson, M.A.; Slater, R.D.; Simpson, R.R.S. Representation of magnetic characteristic, including hysteresis, using Preisach’s theory. Proc. Inst. Electr. Eng. 1977, 124, 895–898. [Google Scholar] [CrossRef]
- Yang, Q.; Li, Y.; Zhao, Z.; Zhu, L.; Luo, Y.; Zhu, J. Design of a 3-D rotational magnetic properties measurement structure for soft magnetic materials. IEEE Trans. Appl. Supercond. 2014, 24, 1–4. [Google Scholar] [CrossRef]
- Moses, A.J. Importance of rotational losses in rotating machines and transformers. J. Mater. Eng. Perform. 1992, 1, 235–244. [Google Scholar] [CrossRef]
- Hernandez-Aramburo, C.A.; Green, T.C.; Smith, A.C. Estimating rotational iron losses in an induction machine. IEEE Trans. Magn. 2003, 39, 3527–3533. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yang, Q.; Zhu, J.; Lin, Z.; Guo, Y.; Sun, J. Research of Three-Dimensional Magnetic Reluctivity Tensor Based on Measurement of Magnetic Properties. IEEE Trans. Appl. Supercond. 2010, 20, 1932–1935. [Google Scholar]
- Stoner, E.; Wohlfarth, E. A mechanism of magnetic hysteresis in heterogeneous alloys. IEEE Trans. Magn. 1991, 27, 3475–3518. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Mathematical Model of Hysteresis and Their Applications; Academic Press: New York, NY, USA, 2003. [Google Scholar]
- Zhu, L.; Wu, W.; Xu, X.; Guo, Y.; Li, W.; Lu, K.; Koh, C. An Improved Anisotropic Vector Preisach Hysteresis Model Taking Account of Rotating Magnetic Fields. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, J.; Yang, Q.; Lin, Z.W.; Wang, Y.; Xu, W. Magnetic properties measurement of soft magnetic composite materials over wide range of excitation frequency. IEEE Trans. Ind. Appl. 2012, 48, 88–97. [Google Scholar] [CrossRef]
- Kuczmann, M. Measurement and Simulation of Vector Hysteresis Characteristics. IEEE Trans. Magn. 2009, 45, 5188–5191. [Google Scholar] [CrossRef]
- Soda, N.; Enokizono, M. Utilization method of electrical steel sheets on stator of self-propelled rotary actuator. In Proceedings of the XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 918–923. [Google Scholar]
- Zhu, J.; Ramsden, V.S. Two dimensional measurement of magnetic field and core loss using a square specimen tester. IEEE Trans. Magn. 1993, 29, 2995–2997. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Zhong, J.; Lu, H.; Jin, J. Measurement and modeling of rotational core losses of soft magnetic materials used in electrical machines: A review. IEEE Trans. Magn. 2008, 44, 279–291. [Google Scholar]
- Sievert, J. The measurement of magnetic properties of electrical sheet steel—Survey on methods and situation of standards. J. Magn. Magn. Mater. 2000, 215, 647–651. [Google Scholar] [CrossRef]
- Dlala, E.; Saitz, J.; Arkkio, A. Inverted and forward Preisach models for numerical analysis of electromagnetic field problems. IEEE Trans. Magn. 2006, 42, 1963–1973. [Google Scholar] [CrossRef]
- Lin, J.; Chiang, M. Tracking Control of a magnetic shape memory actuator using an inverse Preisach model with modified fuzzy sliding mode control. Sensors 2016, 16, 1368. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Naidu, S.R. Simulation of the hysteresis phenomenon using Preisach’s theory. IEE Proc. Part A 1990, 137, 73–79. [Google Scholar] [CrossRef]
- Dlala, E.; Belahcen, A.; Fonteyn, K.A.; Belkasim, M. Improving loss properties of the Mayergoyz vector hysteresis model. IEEE Trans. Magn. 2010, 46, 918–924. [Google Scholar] [CrossRef]
- Iványi, A.; Kuczmann, M. Vector hysteresis model based on neural network. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2003, 22, 730–743. [Google Scholar]
- Dlala, E. Efficient Algorithms for inclusion of the Preisach hysteresis model in nonlinear finite-element methods. IEEE Trans. Magn. 2011, 47, 395–408. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bm/T | w | z | MAPE/% | Bounds of Relative Error/% |
|---|---|---|---|---|
| 1.398 | 0.7893 | 1.9567 | 7.3943 | 21.0209 |
| 1.053 | 0.7004 | 2.1219 | 4.9722 | 8.9200 |
| 0.704 | 0.6997 | 2.2231 | 4.0773 | 9.6547 |
| 0.423 | 0.5783 | 2.2117 | 3.3801 | 8.8839 |
| 0.178 | 0.6891 | 2.1583 | 2.8924 | 8.0391 |
| Bm/T | w | z | MAPE/% | Bounds of Relative Error/% |
|---|---|---|---|---|
| 1.398 | 0.6951 | 2.1655 | 5.9471 | 10.7819 |
| 1.053 | 0.6960 | 2.1666 | 4.1672 | 8.2838 |
| 0.704 | 0.5755 | 2.1715 | 3.0289 | 7.0621 |
| 0.423 | 0.5939 | 2.1686 | 2.9272 | 6.3889 |
| 0.178 | 0.7182 | 2.1995 | 2.6848 | 6.5886 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Xu, H.; Du, Z.; Li, Y.; Liu, L.; Zhao, Z. Anisotropic Vector Hysteresis Simulation of Soft Magnetic Composite Materials Based on a Hybrid Algorithm of PSO–Powell. Materials 2020, 13, 3138. https://doi.org/10.3390/ma13143138
Zhao X, Xu H, Du Z, Li Y, Liu L, Zhao Z. Anisotropic Vector Hysteresis Simulation of Soft Magnetic Composite Materials Based on a Hybrid Algorithm of PSO–Powell. Materials. 2020; 13(14):3138. https://doi.org/10.3390/ma13143138
Chicago/Turabian StyleZhao, Xiaojun, Huawei Xu, Zhenbin Du, Yongjian Li, Lanrong Liu, and Zhigang Zhao. 2020. "Anisotropic Vector Hysteresis Simulation of Soft Magnetic Composite Materials Based on a Hybrid Algorithm of PSO–Powell" Materials 13, no. 14: 3138. https://doi.org/10.3390/ma13143138