Effect of Magnet Position on Tipping and Bodily Tooth Movement in Magnetic Force-Driven Orthodontics

 ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
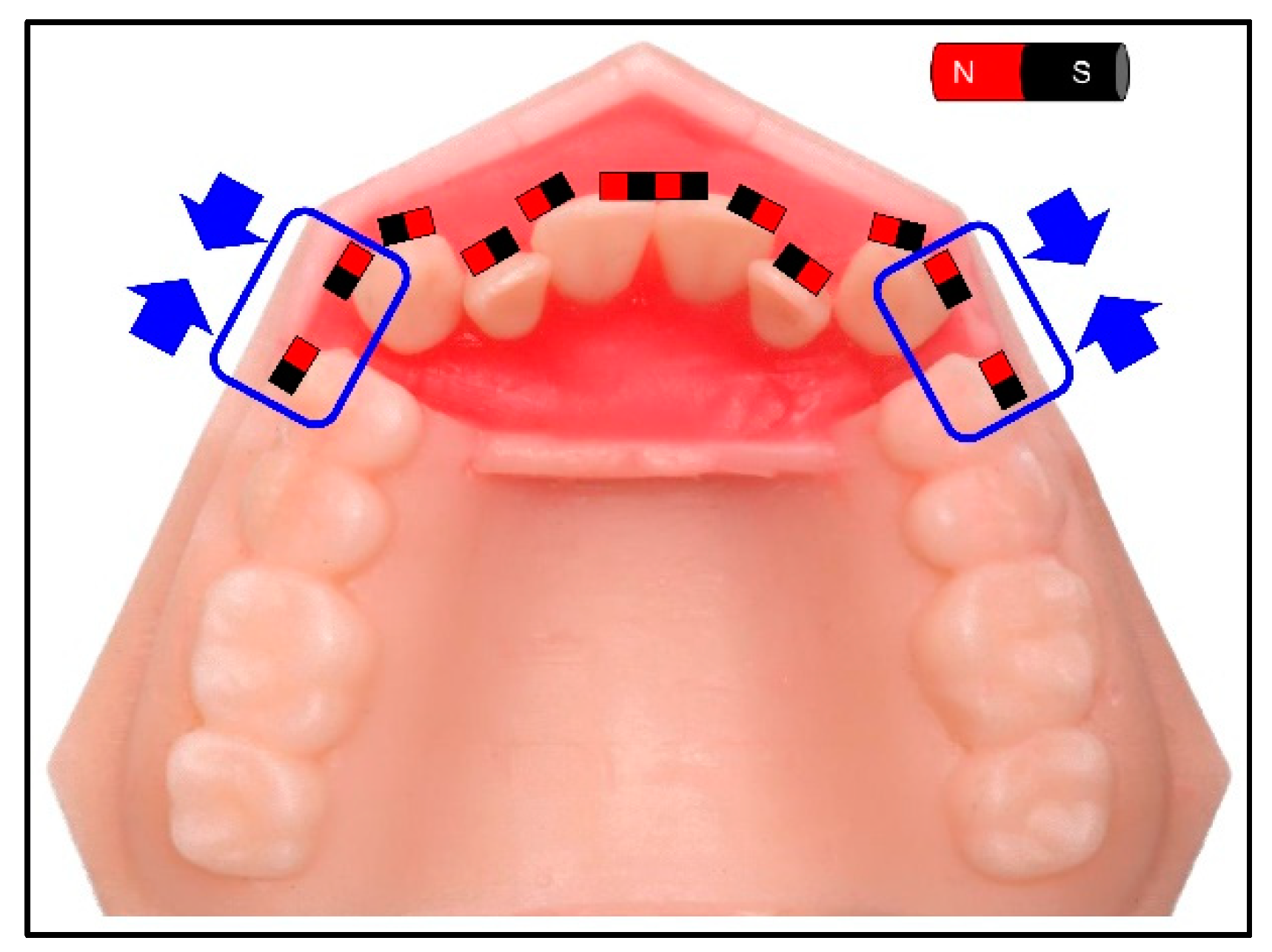
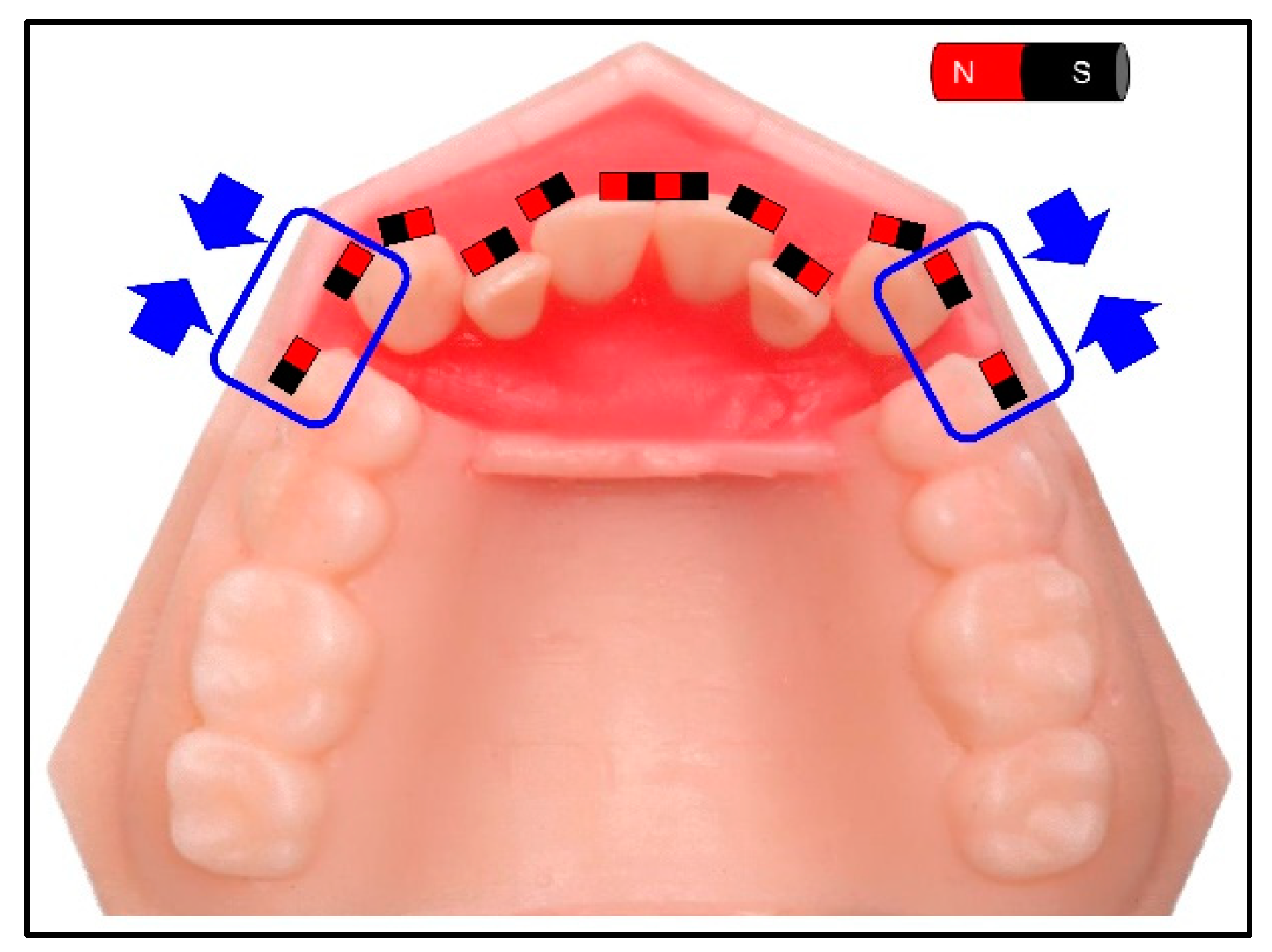
2.1. Design and Fabrication of Typodont Model Used
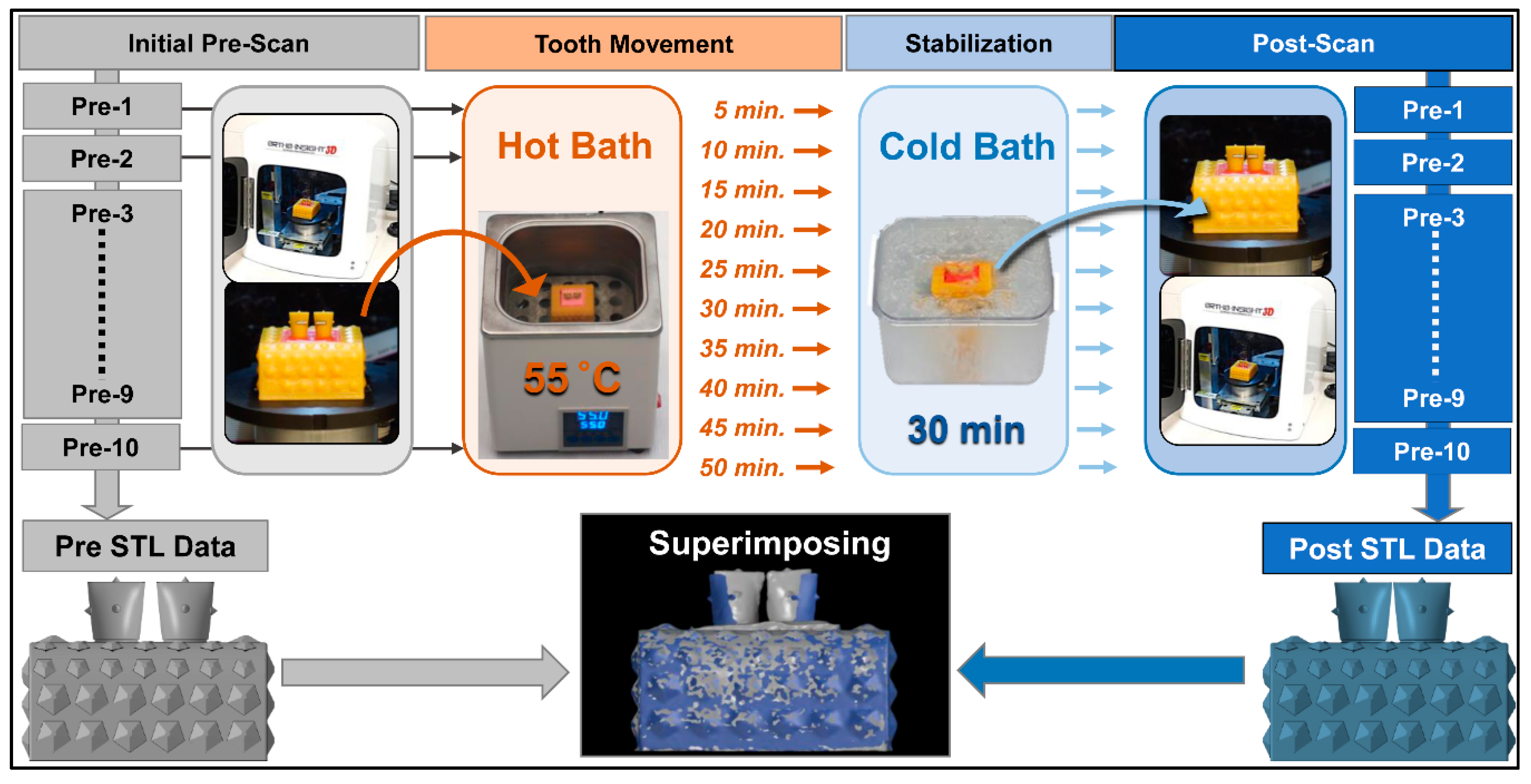
2.2. Experiment Flowchart
2.3. Analysis of the Movement and Rotation
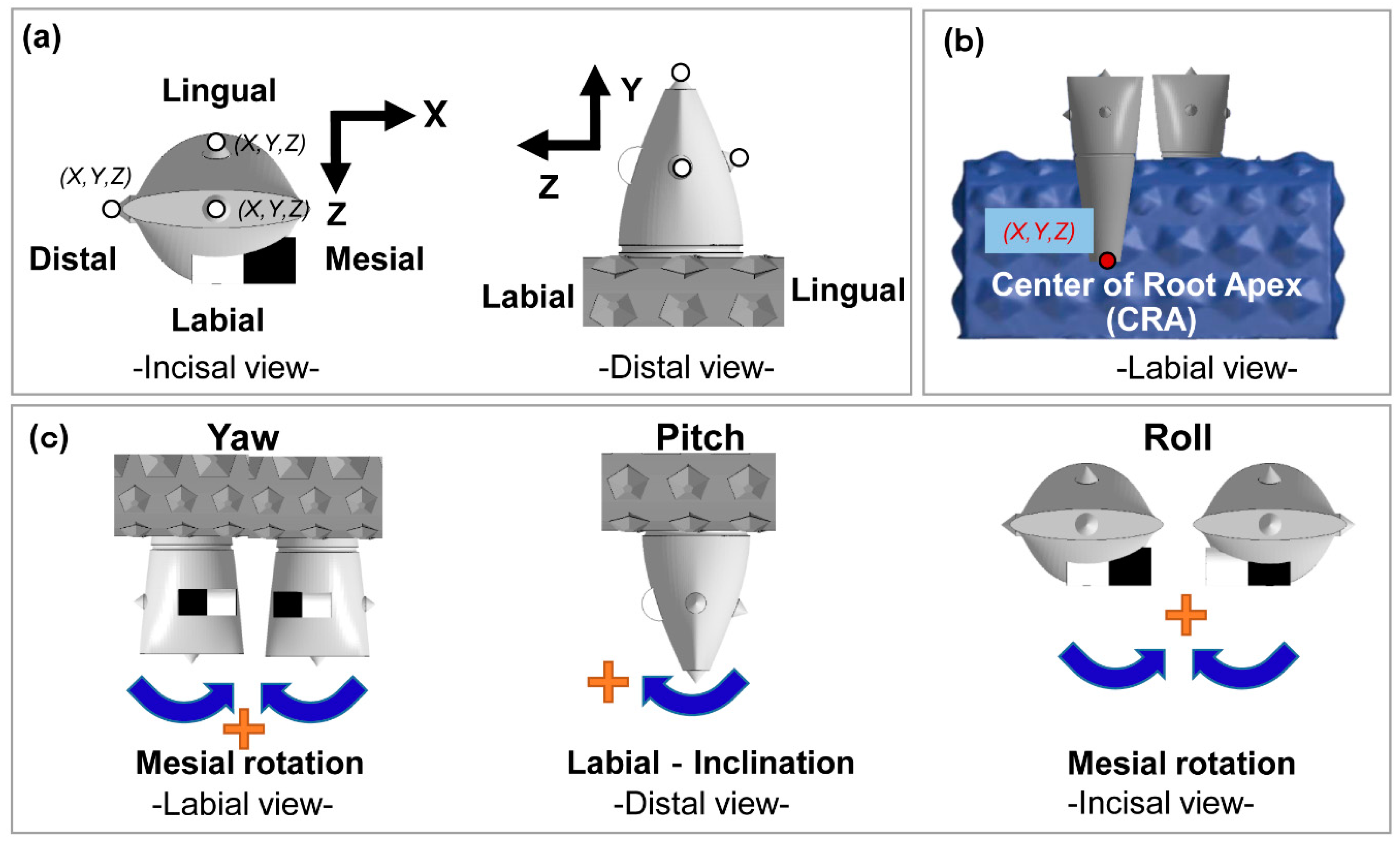
2.3.1. Measurement Points for Movement and Rotation
2.3.2. Calculation of Tooth Movement and Rotation
2.4. Application of the Magnetic Force-Driven Technique to the Moderate Crowding Case
2.5. Statistical Analysis
3. Results
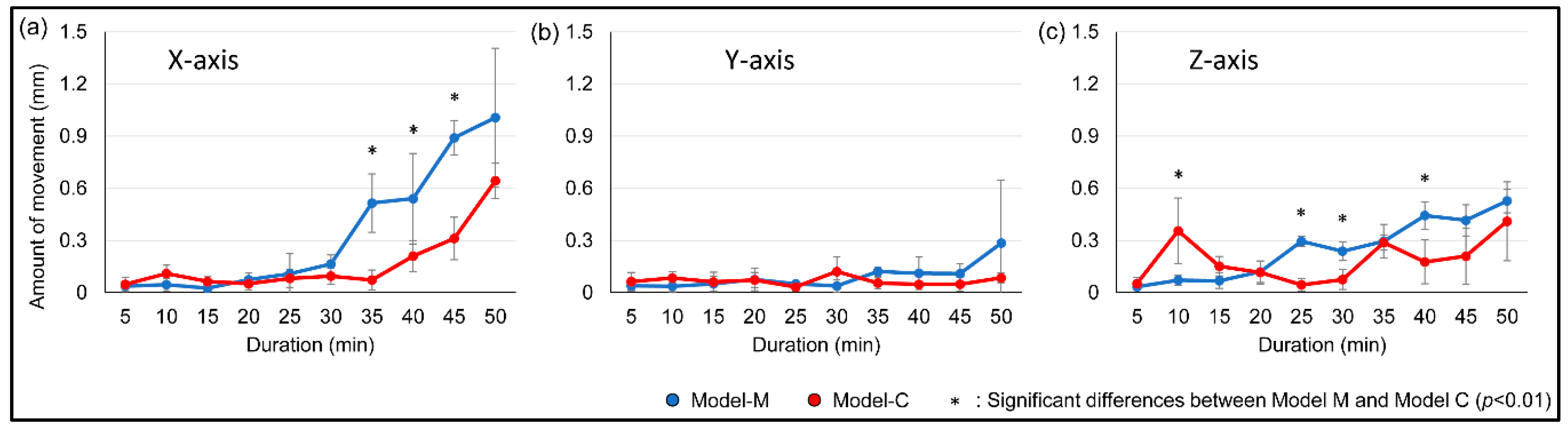
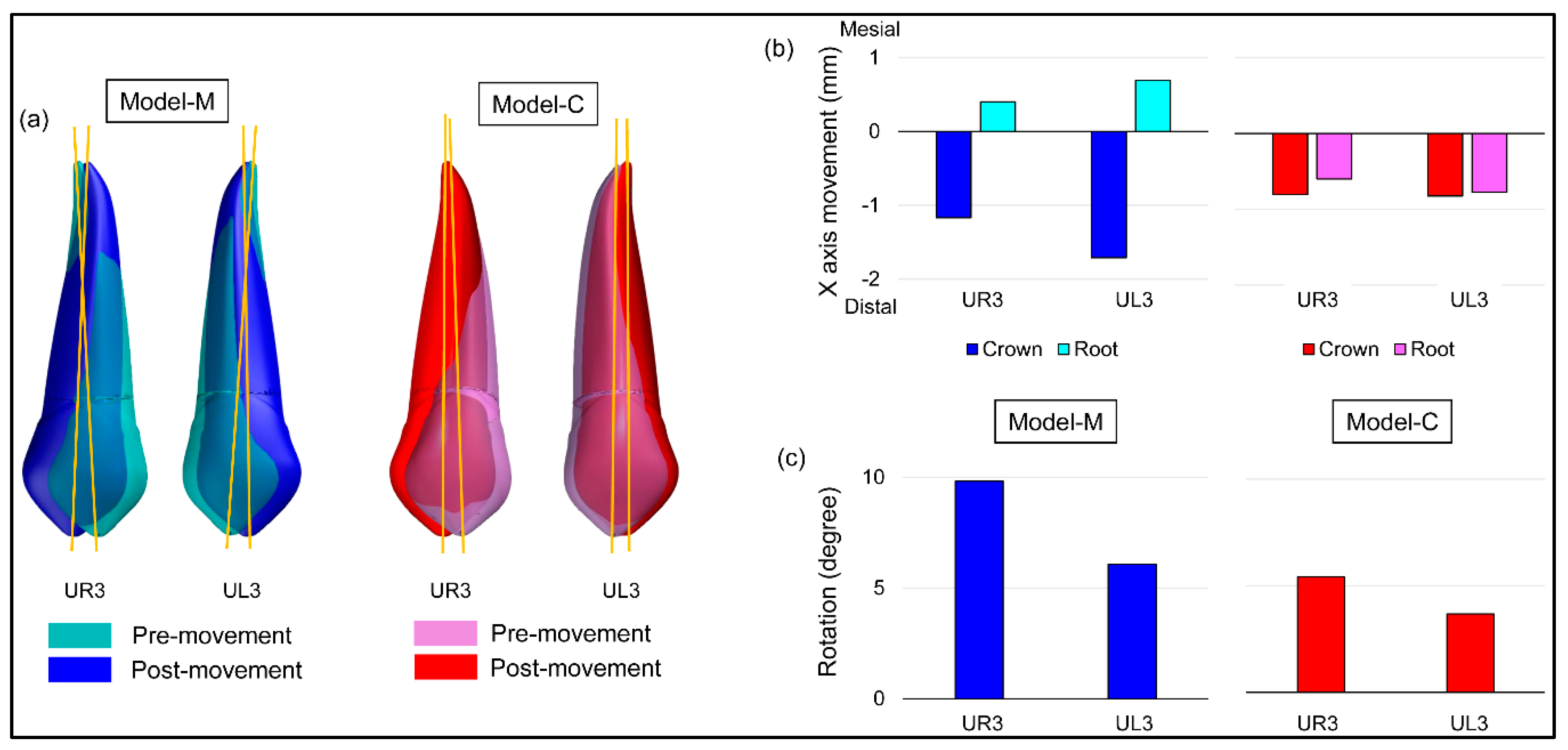
3.1. Crown Movement
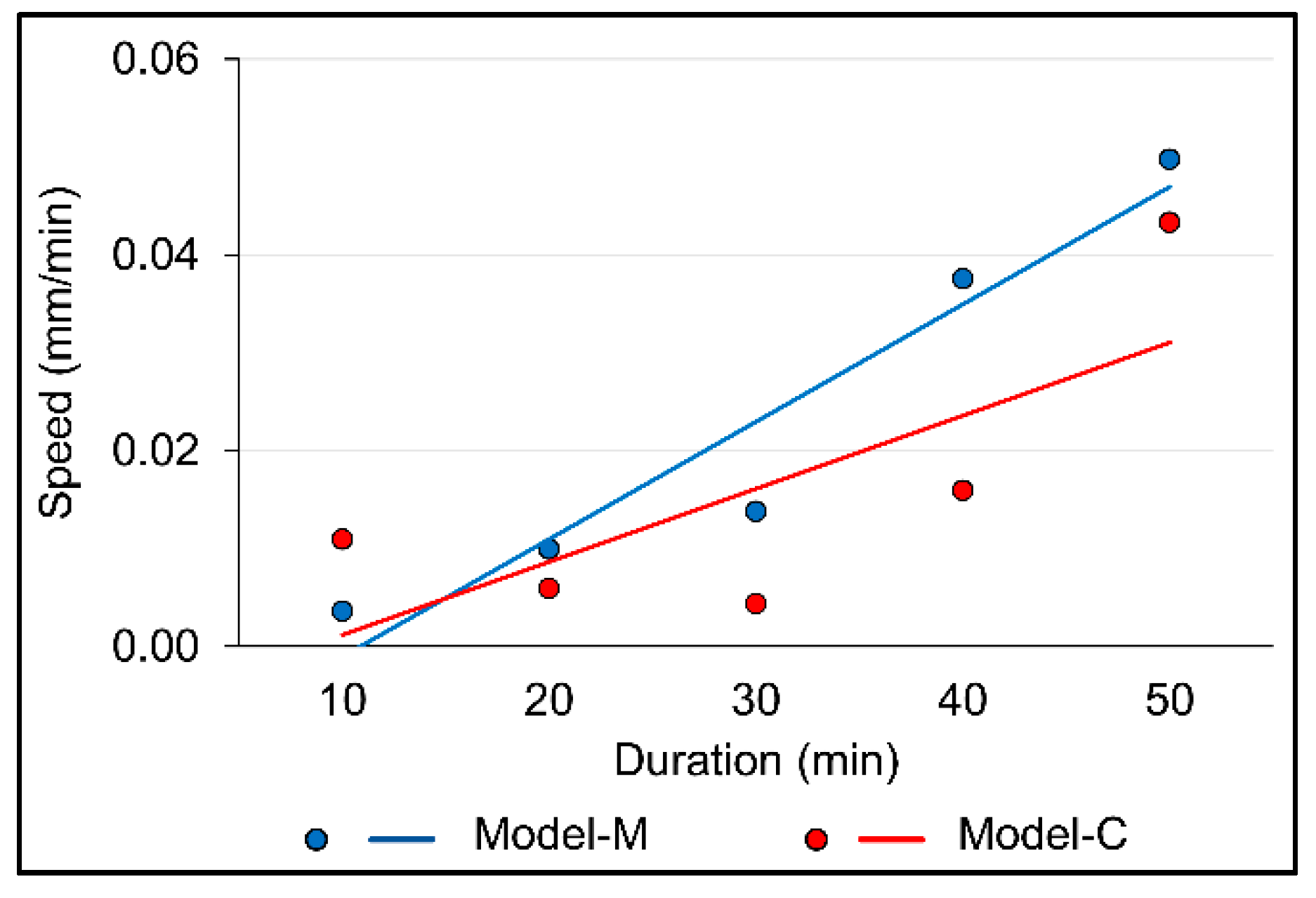
3.2. Speed of Movement
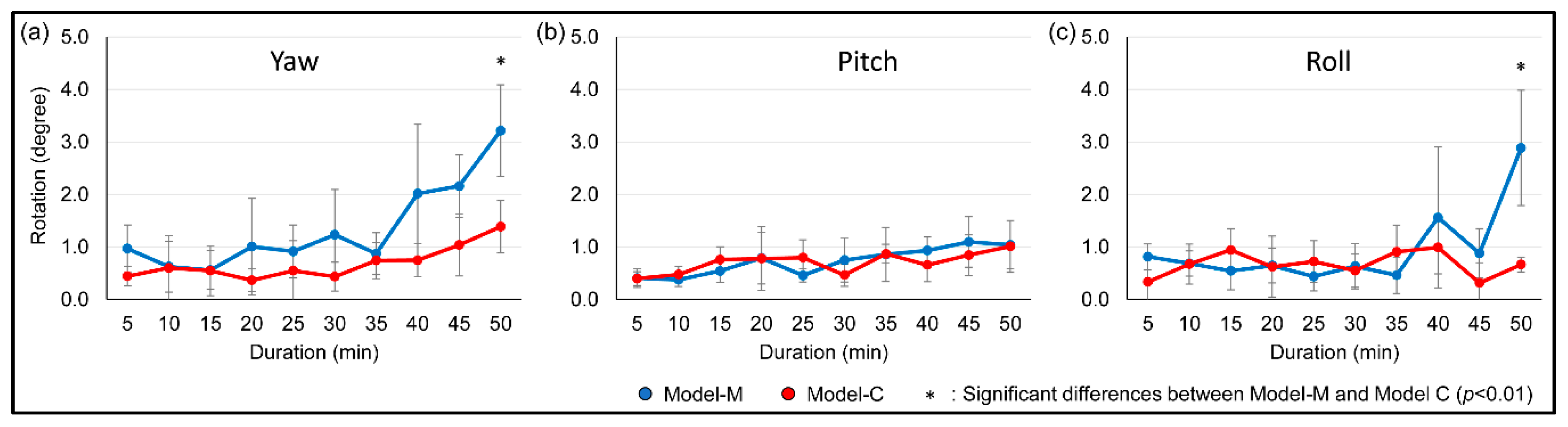
3.3. Tooth Rotation
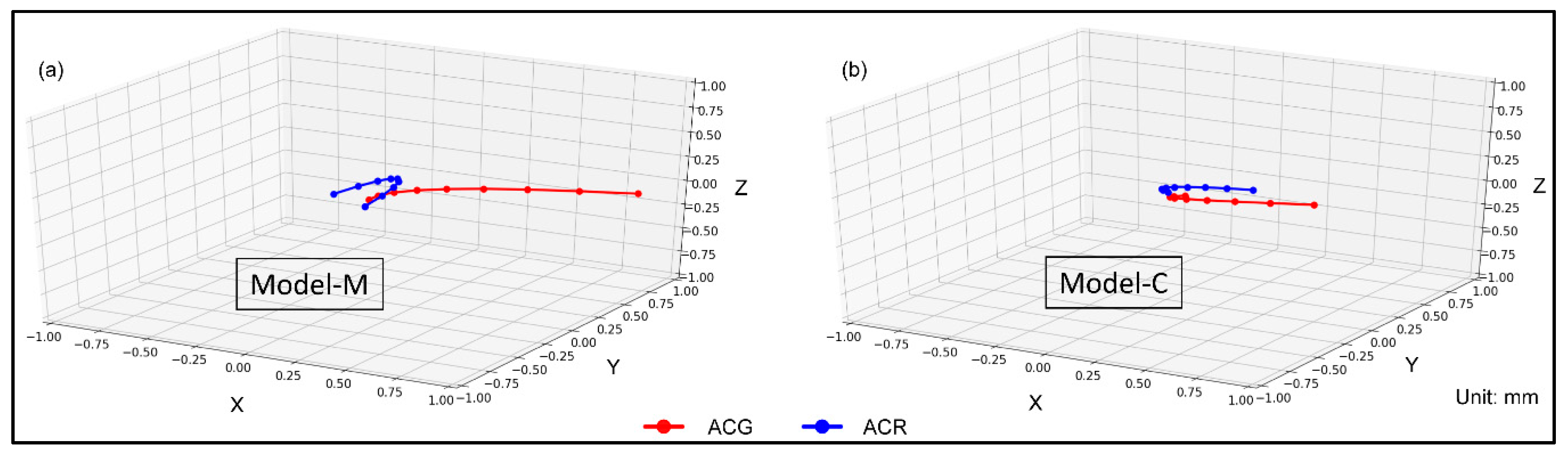
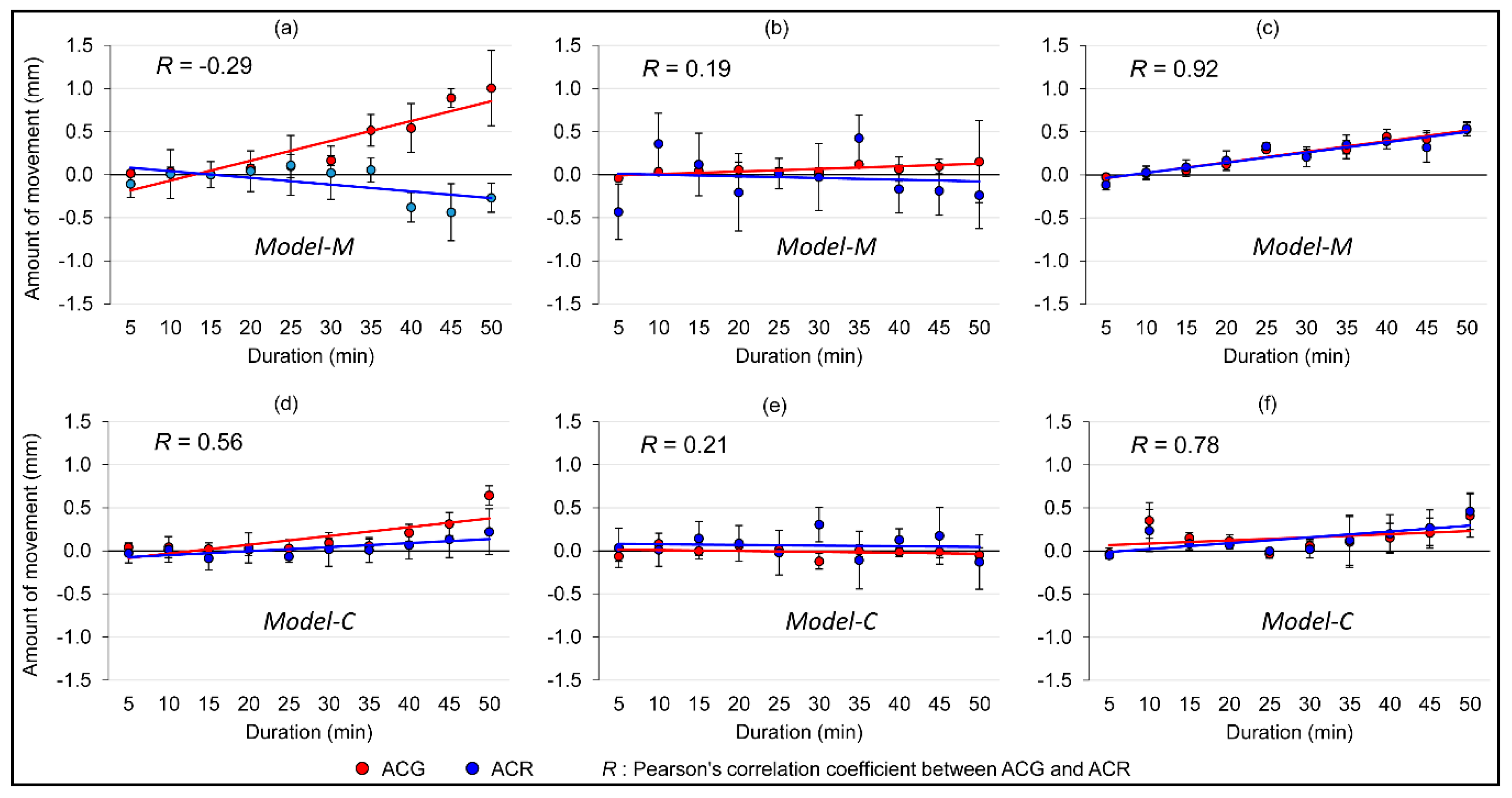
3.4. The Relationship between Tooth and Root Movement
3.5. Application of the Magnetic Force-Driven Technique to the Moderate Crowding Case
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Darendeliler, M.A.; Darendeliler, A.; Mandurino, M. Clinical application of magnets in orthodontics and biological implications: A review. Eur. J. Orthod. 1997, 19, 431–442. [Google Scholar] [CrossRef] [PubMed]
- Robinson, A.L. Powerful New Magnet Material Found. Science 1984, 2, 920–922. [Google Scholar] [CrossRef] [PubMed]
- Bhat, V.S.; Shenoy, K.K.; Premkumar, P. Magnets in dentistry. Arch. Med. Health Sci. 2013, 1, 73–79. [Google Scholar] [CrossRef]
- Prasad, M.; Manoj-Kumar, M.; Gowri-Sankar, S.; Chaitanya, N.; Vivek-Reddy, G.; Venkatesh, N. Clinical evaluation of neodymium-iron-boron (Ne2Fe14B) rare earth magnets in the treatment of mid line diastemas. J. Clin. Exp. Dent. 2016, 8, e164–e171. [Google Scholar] [CrossRef] [PubMed]
- Hwang, H.S.; Lee, K.H. Intrusion of overerupted molars by corticotomy and magnets. Am. J. Orthod. Dentofac. Orthop. 2001, 120, 209–216. [Google Scholar] [CrossRef]
- Riley, M.A.; Walmsley, A.D.; Harris, I.R. Magnets in prosthetic dentistry. J. Prosthet. Dent. 2001, 86, 137–142. [Google Scholar] [CrossRef]
- Muller, M. The use of magnets in orthodontics: An alternative means to produce tooth movement. Eur. J. Orthod. 1984, 6, 247–253. [Google Scholar] [CrossRef]
- Huang, T.T.Y.; Elekdag-Turk, S.; Dalci, O.; Almuzian, M.; Karadeniz, E.I.; Gonzales, C.; Petocz, P.; Turk, T.; Darendeliler, M.A. The extent of root resorption and tooth movement following the application of ascending and descending magnetic forces: A prospective split mouth, microcomputed-tomography study. Eur. J. Orthod. 2017, 39, 547–553. [Google Scholar] [CrossRef]
- Toto, P.D.; Choukas, N.C.; Abati, A. Reaction of bone to magnetic implant. J. Dent. Res. 1963, 42, 643–652. [Google Scholar] [CrossRef]
- Mussard, M.; Le Mouël, J.-L.; Poirier, J.-P. On some early attempts to determine the variation of the magnetic force with distance. Comptes Rendus Geosci. 2013, 345, 225–229. [Google Scholar] [CrossRef]
- Bondemark, L.; Kurol, J.; Hallonsten, A.L.; Andreasen, J.O. Attractive magnets for orthodontic extrusion of crown-root fractured teeth. Am. J. Orthod. Dentofac. Orthop. 1997, 112, 187–193. [Google Scholar] [CrossRef]
- Kawata, T.; Takeda, S. New Orthodontic Appliance by Means of Magnetic Bracket. J. Dent. Res. 1977, 56, D162. [Google Scholar]
- Sandler, J.P. An attractive solution to unerupted teeth. Am. J. Orthod. Dentofac. Orthop. 1991, 100, 489–493. [Google Scholar] [CrossRef]
- Phelan, A.; Tarraf, N.E.; Taylor, P.; Honscheid, R.; Drescher, D.; Baccetti, T.; Darendeliler, M.A. Skeletal and dental outcomes of a new magnetic functional appliance, the Sydney Magnoglide, in Class II correction. Am. J. Orthod. Dentofac. Orthop. 2012, 141, 759–772. [Google Scholar] [CrossRef] [PubMed]
- Zhao, N.; Feng, J.; Hu, Z.; Chen, R.; Shen, G. Effects of a novel magnetic orthopedic appliance (MOA-III) on the dentofacial complex in mild to moderate skeletal class III children. Head Face Med. 2015, 11, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kobayashi, N.; Masumoto, H.; Takahashi, S.; Maekawa, S. Optically Transparent Ferromagnetic Nanogranular Films with Tunable Transmittance. Sci. Rep. 2016, 6, 34227. [Google Scholar] [CrossRef]
- Kuwajima, Y.; Ishida, Y.; Lee, C.; Mayama, H.; Satoh, K.; Ishikawa-Nagai, S.J.H. 3D digital analysis of magnetic force-driven orthodontic tooth movement. Heliyon 2019, 5, e02861. [Google Scholar] [CrossRef]
- Kondo, T.; Hotokezaka, H.; Hamanaka, R.; Hashimoto, M.; Nakano-Tajima, T.; Arita, K.; Kurohama, T.; Ino, A.; Tominaga, J.Y.; Yoshida, N. Types of tooth movement, bodily or tipping, do not affect the displacement of the tooth’s center of resistance but do affect the alveolar bone resorption. Angle Orthod. 2017, 87, 563–569. [Google Scholar] [CrossRef] [Green Version]
- Pilon, J.J.; Kuijpers-Jagtman, A.M.; Maltha, J.C. Magnitude of orthodontic forces and rate of bodily tooth movement. An experimental study. Am. J. Orthod. Dentofac. Orthop. 1996, 110, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Jacob, H.B.; Wyatt, G.D.; Buschang, P.H. Reliability and validity of intraoral and extraoral scanners. Prog. Orthod. 2015, 16, 38. [Google Scholar] [CrossRef] [Green Version]
- Norton, L.A.; Burstone, C.J. The biophysics of bone remodeling during orthodontics—Optimal force considerations. In The Biology of Tooth Movement; CRC Press: Boca Raton, FL, USA, 1988; pp. 321–333. [Google Scholar]
- Ren, Y.; Maltha, J.C.; Kuijpers-Jagtman, A.M. Optimum force magnitude for orthodontic tooth movement: A systematic literature review. Angle Orthod. 2003, 73, 86–92. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Maltha, J.C.; Van’t Hof, M.A.; Kuijpers-Jagtman, A.M. Optimum force magnitude for orthodontic tooth movement: A mathematic model. Am. J. Orthod. Dentofac. Orthop. 2004, 125, 71–77. [Google Scholar] [CrossRef] [PubMed]
- Ozkalayci, N.; Karadeniz, E.I.; Elekdag-Turk, S.; Turk, T.; Cheng, L.L.; Darendeliler, M.A. Effect of continuous versus intermittent orthodontic forces on root resorption: A microcomputed tomography study. Angle Orthod. 2018, 88, 733–739. [Google Scholar] [CrossRef] [PubMed]
- Ballard, D.J.; Jones, A.S.; Petocz, P.; Darendeliler, M.A. Physical properties of root cementum: Part 11. Continuous vs intermittent controlled orthodontic forces on root resorption. A microcomputed-tomography study. Am. J. Orthod. Dentofac. Orthop. 2009, 136, 8.e1–8.e8, discussion 8–9. [Google Scholar] [CrossRef]
- Maltha, J.C.; van Leeuwen, E.J.; Dijkman, G.E.; Kuijpers-Jagtman, A.M. Incidence and severity of root resorption in orthodontically moved premolars in dogs. Orthod. Craniofac. Res. 2004, 7, 115–121. [Google Scholar] [CrossRef]
- Gay, G.; Ravera, S.; Castroflorio, T.; Garino, F.; Rossini, G.; Parrini, S.; Cugliari, G.; Deregibus, A. Root resorption during orthodontic treatment with Invisalign®: A radiometric study. Prog. Orthod. 2017, 18, 12. [Google Scholar] [CrossRef]
- Kusy, R.P.; Tulloch, J.F. Analysis of moment/force ratios in the mechanics of tooth movement. Am. J. Orthod. Dentofac. Orthop. 1986, 90, 127–131. [Google Scholar] [CrossRef]
- Chaimongkol, P.; Thongudomporn, U.; Lindauer, S.J. Alveolar bone response to light-force tipping and bodily movement in maxillary incisor advancement: A prospective randomized clinical trial. Angle Orthod. 2018, 88, 58–66. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.W. The force requirements for tooth movement, Part I: Tipping and bodily movement. Aust. Orthod. J. 1995, 13, 238–248. [Google Scholar]
- Gursoy, U.K.; Sokucu, O.; Uitto, V.J.; Aydin, A.; Demirer, S.; Toker, H.; Erdem, O.; Sayal, A. The role of nickel accumulation and epithelial cell proliferation in orthodontic treatment-induced gingival overgrowth. Eur. J. Orthod. 2007, 29, 555–558. [Google Scholar] [CrossRef] [Green Version]
- Yiu, E.Y.; Fang, D.T.; Chu, F.C.; Chow, T.W. Corrosion resistance of iron-platinum magnets. J. Dent. 2004, 32, 423–429. [Google Scholar] [CrossRef] [PubMed]
- Mota Júnior, S.L.; de Andrade Vitral, J.; Schmitberger, C.A.; Machado, D.B.; Avelar, J.C.; Fraga, M.R.; da Silva Campos, M.J.; Vitral, R.W. Evaluation of the vertical accuracy of bracket placement with the Boone gauge. Am. J. Orthod. Dentofac. Orthop. 2015, 148, 821–826. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.F.; Wu, J.L.; Song, S.L.; Xu, L.X.; Chen, J.; Peng, W. Thermo-Mechanical Properties of Glass Fiber Reinforced Shape Memory Polyurethane for Orthodontic Application. J. Mater. Sci. Mater. Med. 2018, 29, 148. [Google Scholar] [CrossRef] [PubMed]
- Mota Júnior, S.L.; Campos, M.; Schmitberger, C.A.; Vitral, J.A.; Fraga, M.R.; Vitral, R.W.F. Evaluation of the prototype of a new bracket-positioning gauge. Dent. Press J. Orthod. 2018, 23, 68–74. [Google Scholar] [CrossRef] [PubMed]
- Lee, R.J.; Pham, J.; Choy, M.; Weissheimer, A.; Dougherty, H.L., Jr.; Sameshima, G.T.; Tong, H. Monitoring of typodont root movement via crown superimposition of single cone-beam computed tomography and consecutive intraoral scans. Am. J. Orthod. Dentofac. Orthop. 2014, 145, 399–409. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishida, Y.; Kuwajima, Y.; Lee, C.; Ogawa, K.; Da Silva, J.D.; Ishikawa-Nagai, S. Effect of Magnet Position on Tipping and Bodily Tooth Movement in Magnetic Force-Driven Orthodontics. Materials 2020, 13, 3588. https://doi.org/10.3390/ma13163588
Ishida Y, Kuwajima Y, Lee C, Ogawa K, Da Silva JD, Ishikawa-Nagai S. Effect of Magnet Position on Tipping and Bodily Tooth Movement in Magnetic Force-Driven Orthodontics. Materials. 2020; 13(16):3588. https://doi.org/10.3390/ma13163588
Chicago/Turabian StyleIshida, Yoshiki, Yukinori Kuwajima, Cliff Lee, Kaho Ogawa, John D. Da Silva, and Shigemi Ishikawa-Nagai. 2020. "Effect of Magnet Position on Tipping and Bodily Tooth Movement in Magnetic Force-Driven Orthodontics" Materials 13, no. 16: 3588. https://doi.org/10.3390/ma13163588
APA StyleIshida, Y., Kuwajima, Y., Lee, C., Ogawa, K., Da Silva, J. D., & Ishikawa-Nagai, S. (2020). Effect of Magnet Position on Tipping and Bodily Tooth Movement in Magnetic Force-Driven Orthodontics. Materials, 13(16), 3588. https://doi.org/10.3390/ma13163588