
3D Printed Sand Tools for Thermoforming Applications of Carbon Fiber Reinforced Composites—A Perspective


Abstract
:1. Introduction
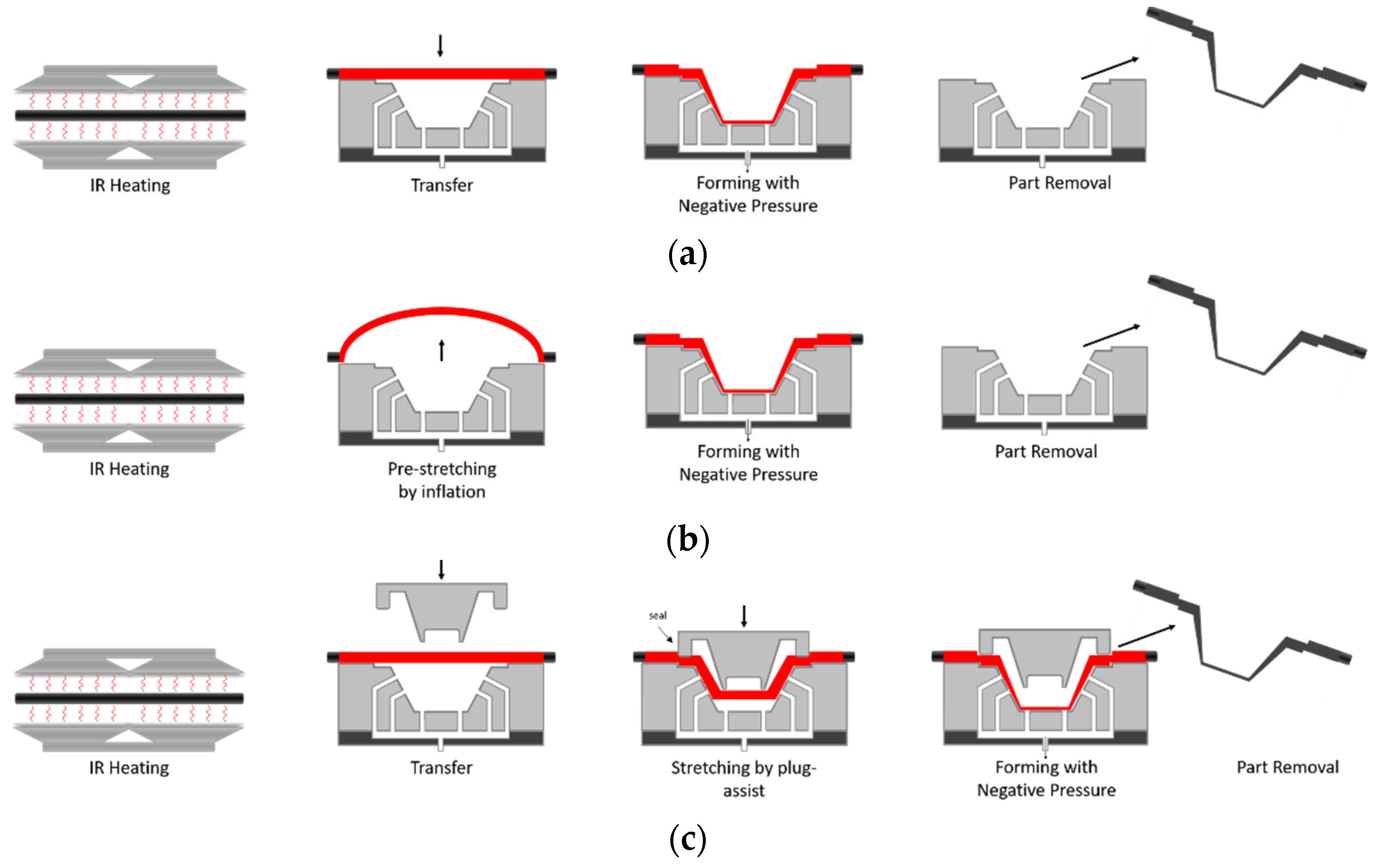
2. Thermoforming of Fiber Reinforced Composites
3. Binder Jetting of Sand Tools
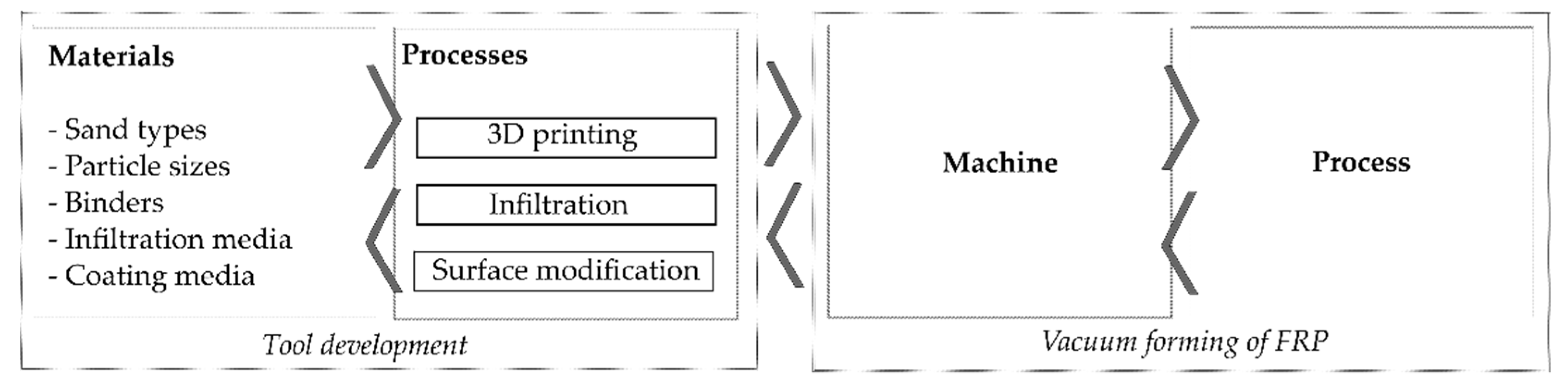
4. Sand Tools for Vacuum Forming of FRP
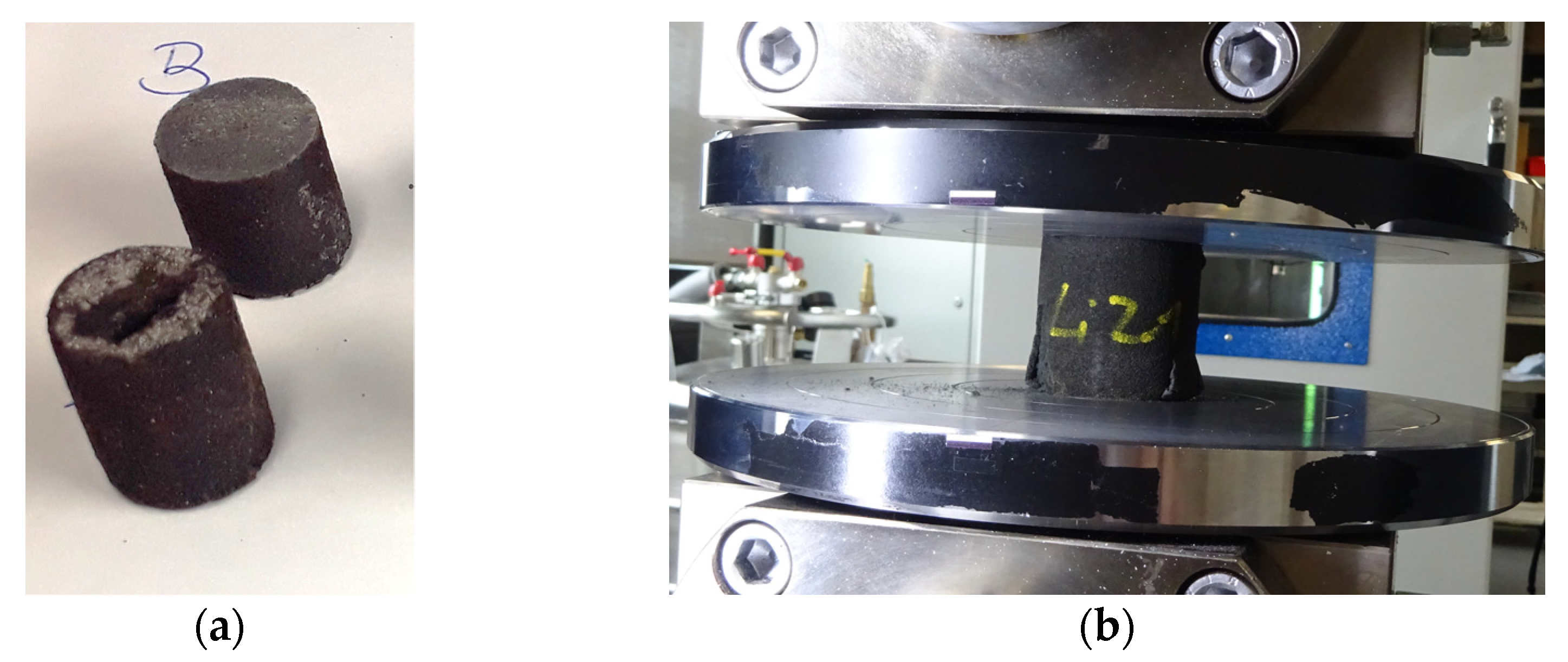
- Compression strength exceeding 20 MPa in order to stand the specific process loads;
- Acceptable wear resistance to withstand at least ten forming cycles;
- Surface finish with arithmetic mean roughness Ra < 20 µm to minimize indentations on visible surfaces;
- Porous structure to ensure a safe application of vacuum;
- Temperature resistance up to 280 °C;
- Cost-effective in terms of engineering and production comparable with state-of-the-art tools.
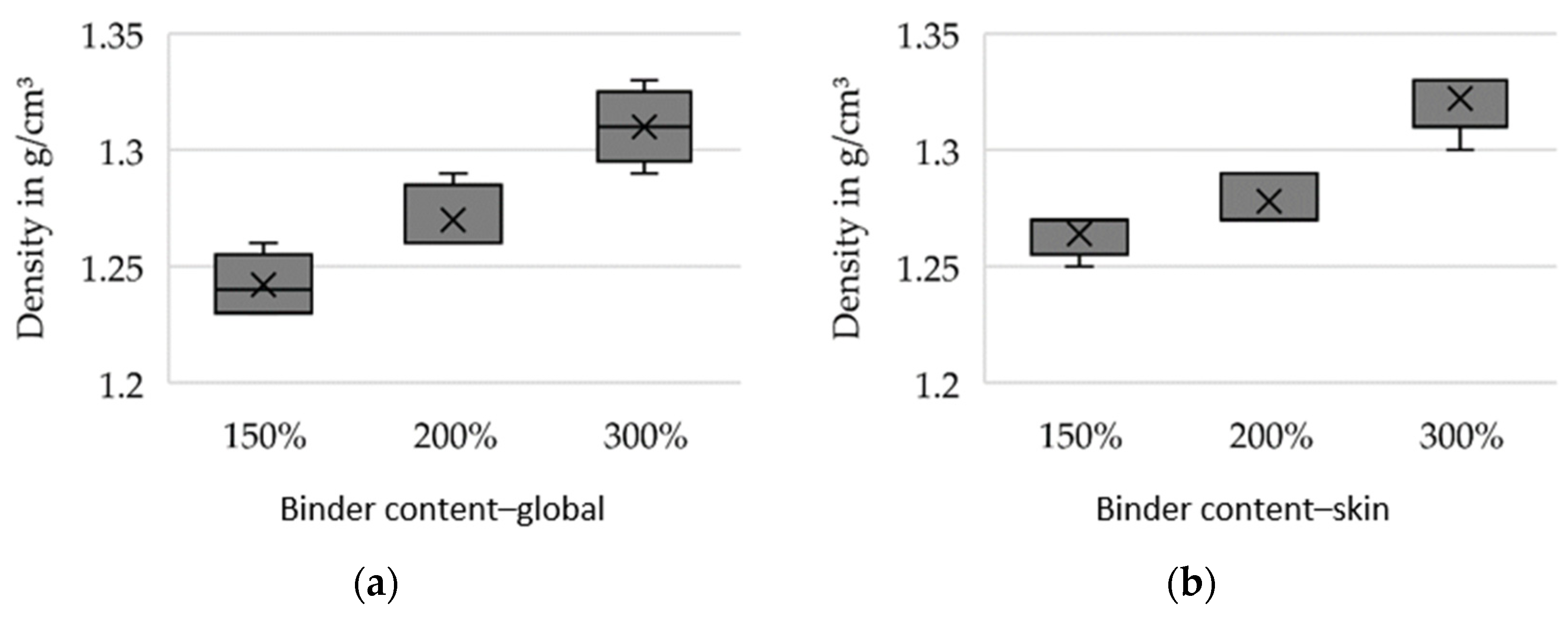
4.1. Initial Approaches and Results in Binder Jetting of Sand Tools
4.2. Initial Approaches and Results in Infiltration of Sand Tools
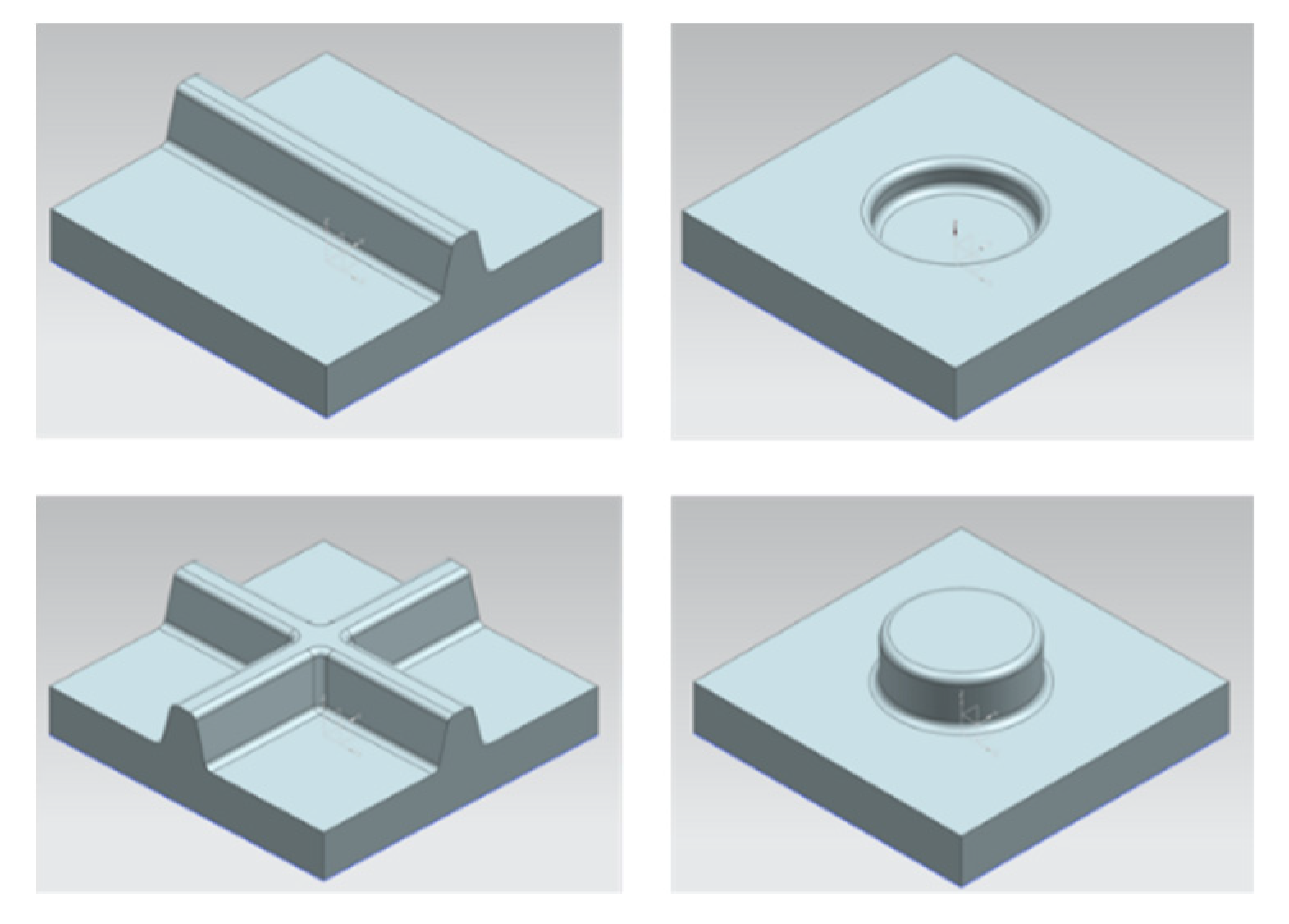
4.3. Intended Future Investigations Regarding Sand Tool Fabrication
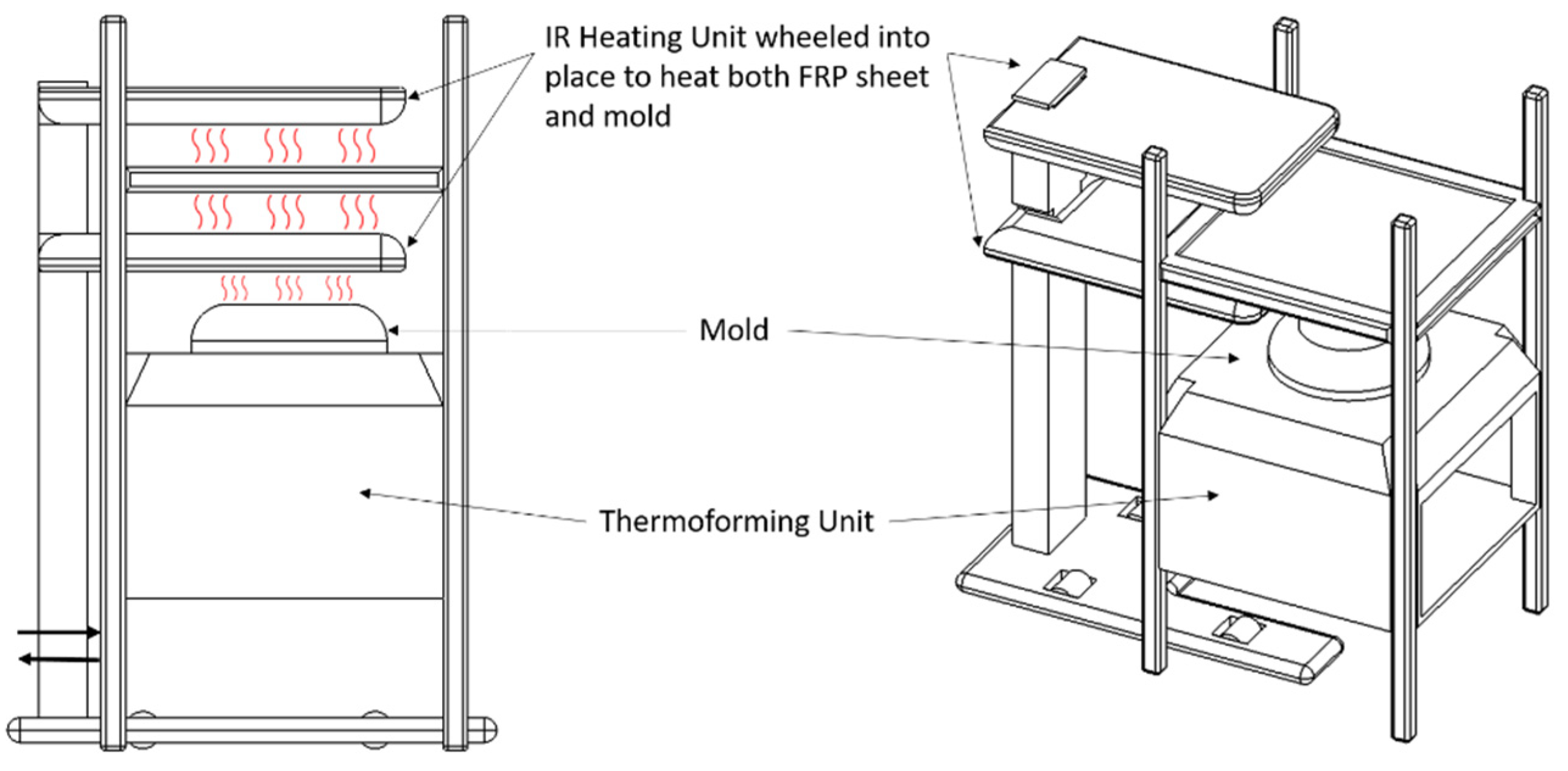
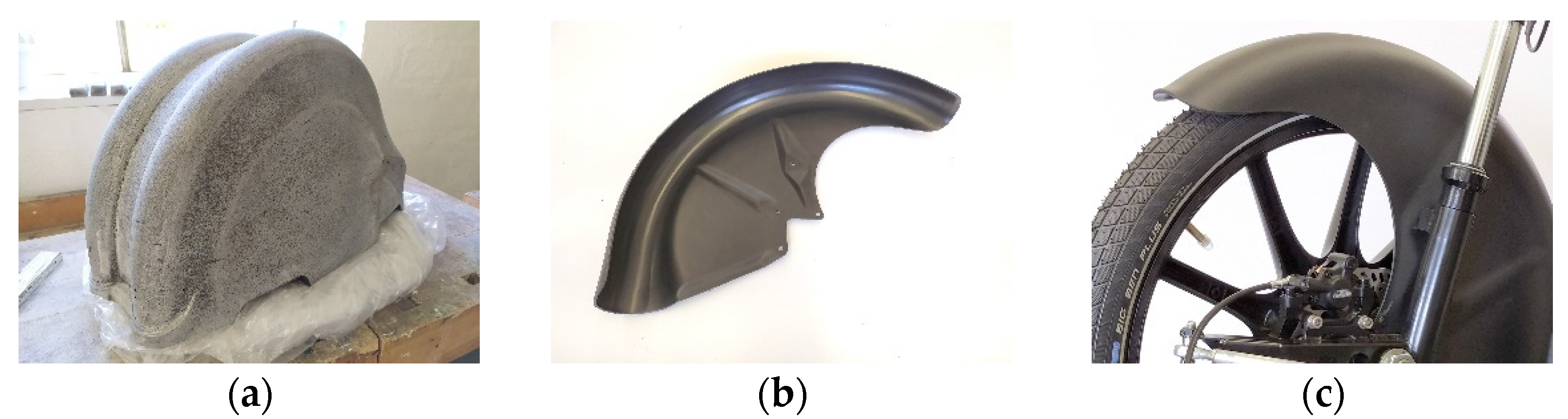
4.4. Thermoforming of Organosheets
4.5. Summary of Technical Challenges
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Francis, F.L. Solid Processes. In Materials Processing–A Unified Approach to Processing of Metals, Ceramics and Polymers, 1st ed.; Academic Press: Cambridge, MA, USA, 2016; Chapter 4; pp. 251–342. [Google Scholar]
- Brenken, B. Extrusion deposition additive manufacturing of fiber reinforced semi-crystalline polymers. Ph.D. Thesis, Purude University, West Lafayette, IN, USA, 2017. [Google Scholar]
- Brøtan, V.; Berg, O.Å.; Sørby, K. Additive Manufacturing for Enhanced Performance of Molds. Procedia CIRP 2016, 54, 186–190. [Google Scholar] [CrossRef] [Green Version]
- Fette, M.; Sander, P.; Wulfsberg, J.P.; Zierk, H.; Herrmann, A.S.; Stoess, N. Optimized and Cost-efficient Compression Molds Manufactured by Selective Laser Melting for the Production of Thermoset Fiber Reinforced Plastic Aircraft Components. Procedia CIRP 2015, 35, 25–30. [Google Scholar] [CrossRef] [Green Version]
- Warden, G.F. Development of an Additive Manufacturing Compression Molding Process for Low Cost In-House Prototyping. Bachelor’s Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, 2018. [Google Scholar]
- Bere, P.; Neamtu, C.; Udroiu, R. Novel Method for the Manufacture of Complex CFRP Parts Using FDM-based Molds. Polymers 2020, 12, 2220. [Google Scholar] [CrossRef]
- Hassen, A.A.; Lindahl, J.; Post, B.; Love, L.; Kunc, V. Additive manufacturing of composite tooling using high temperature thermoplastic materials. In Proceedings of the SAMPE Conference, Long Beach, CA, USA, 23–26 May 2016. [Google Scholar]
- Yeole, P.; Herring, C.; Hassen, A.; Kunc, V.; Stratton, R.; Vaidya, U. Improve durability and surface quality of additively manufactured molds using carbon fiber prepreg. Polym. Compos. 2021, 42, 2101–2111. [Google Scholar] [CrossRef]
- Hassen, A.A.; Springfield, R.; Lindhal, J.; Post, B.K.; Love, L.; Chad, D.; Uday, V.; Pipes, R.B.; Kunc, V. The Durability of Large-Scale Additive Manufacturing Composite Molds. In Proceedings of the CAMX Conference, Anaheim, CA, USA, 26–29 September 2016. [Google Scholar]
- Junk, S.; Schrock, S.; Schröder, W. Additive tooling for thermoforming a cowling of an UAV using binder jetting. In Proceedings of the 22nd International Esaform Conference On Material Forming (Esaform 2019), Vitoria-Gasteiz, Spain, 8–10 May 2019; AIP Publishing: College Park, MD, USA, 2019; Volume 2113, p. 150001. [Google Scholar]
- Chimento, J.; Highsmith, M.J.; Crane, N. 3D printed tooling for thermoforming of medical devices. Rapid Prototyp. J. 2011, 17, 387–392. [Google Scholar] [CrossRef]
- Modi, Y.K. Calcium sulphate based 3D printed tooling for vacuum forming of medical devices: An experimental evaluation. Mater. Technol. 2018, 33, 642–650. [Google Scholar] [CrossRef]
- Bhandari, S. Feasibility of Using 3D Printed Molds for Thermoforming Thermoplastic Composites. Master’s Thesis, University of Maine, Orono, ME, USA, 2017. [Google Scholar]
- Blanchard, P.J.; Rudd, C.D. Cycle time reduction in resin transfer moulding by phased cytalyst injection. Compos. Sci. Technol. 1996, 56, 123–133. [Google Scholar] [CrossRef]
- Jamil, M.S.; Khalid, R.; Zulqarnain, A.; Salman, M. Improving Thermoform Productivity: Case of Design-of-Experiment. J. Qual. Technol. Manag. 2018, XV, 87–106. [Google Scholar]
- Henning, F.; Moeller, E. Handbuch Leichtbau: Methoden, Werkstoffe, Fertigung; Hanser: Munich, Germany, 2011. [Google Scholar]
- Schug, A. Unidirectional Fibre Reinforced Thermoplastic Composites: A Forming Study. Ph.D. Thesis, Technical University Munich, Munich, Germany, 2020. [Google Scholar]
- Sherwood, J.A.; Fetfatsidis, K.A.; Gorczyca, J.L.; Berger, L. Fabric thermostamping in polymer matrix composites. In Manufacturing Techniques for Polymer Matrix Composites (PMCs); Elsevier: Amsterdam, The Netherlands, 2012; pp. 139–181. [Google Scholar]
- Abdin, Y.; Taha, I.; Elsabbagh, A.; Ebeid, S. Description of draping behaviour of woven fabrics over single curvatures by image processing and simulation techniques. Compos. Part B Eng. 2013, 45, 792–799. [Google Scholar] [CrossRef]
- Mills, A.R.; Cornero, L.; Bouquerel, L.; Macura, N.; Cruz, B.A. Materials and Process Development for High Rate Manufacturing of a Carbon Fibre Composite Automotive Floor. In Proceedings of the SAMPE Europe Conference, Stuttgart, Germany, 14–16 November 2017. [Google Scholar]
- Harrison, P.; Gomes, R.; Curado-Correia, N. Press forming a 0/90 cross-ply advanced thermoplastic composite using the double-dome benchmark geometry. Compos. Part A Appl. Sci. Manuf. 2013, 54, 56–69. [Google Scholar] [CrossRef] [Green Version]
- Thermoformed Plastics Market Size, Share. Industry Report, 2019-URL. Available online: https://www.grandviewresearch.com/industry-analysis/thermoformed-plastics-market (accessed on 2 August 2021).
- Throne, J. Thermoforming. In Applied Plastics Engineering Handbook, 2nd ed.; Plastics Design Library: William Andrew, Applied Science Publishers: Norwich, NY, USA, 2017; pp. 345–375. [Google Scholar]
- Schwarzmann, P. Thermoforming: A Practical Guide, 2nd ed; Hanser: Munich, Germany, 2018. [Google Scholar]
- Morris, B. Thermoforming, Orientation, and Shrink. In The Science and Technology of Flexible Packaging: Multilayer Films from Resin and Process to End Use Plastics Design Library; Elsevier Inc.: Amsterdam, The Netherlands, 2017; pp. 401–433. [Google Scholar]
- Cha, J.; Song, H.Y.; Hyun, K.; Go, J.S. Rheological measurement of the nonlinear viscoelasticity of the ABS polymer and numerical simulation of thermoforming process. Int. J. Adv. Manuf. Technol. 2020, 107, 2449–2464. [Google Scholar] [CrossRef] [Green Version]
- O’Connor, C.; Martin, P.; Sweeney, J.; Menary, G.; Caton-Rose, P.; Spencer, P. Simulation of the plug-assisted thermoforming of polypropylene using a large strain thermally coupled constitutive model. J. Mater. Process. Technol. 2013, 213, 1588–1600. [Google Scholar] [CrossRef]
- Chen, S.-C.; Huang, S.-T.; Lin, M.-C.; Chien, R.-D. Study on the thermoforming of PC films used for in-mold decoration. Int. Commun. Heat Mass Transf. 2008, 35, 967–973. [Google Scholar] [CrossRef]
- Collins, P.; Harkin-Jones, E.M.A.; Martin, P.J. The Role of Tool/Sheet Contact in Plug-assisted Thermoforming. Int. Polym. Process. 2002, 17, 361–369. [Google Scholar] [CrossRef]
- Morales, R.A.; Candal, M.V.; Santana, O.O.; Gordillo, A.; Salazar, R. Effect of the thermoforming process variables on the sheet friction coefficient. Mater. Des. 2014, 53, 1097–1103. [Google Scholar] [CrossRef] [Green Version]
- Schützer, K.; Helleno, A.L.; Pereira, S.C. The influence of the manufacturing strategy on the production of molds and dies. J. Mater. Process. Technol. 2006, 179, 172–177. [Google Scholar] [CrossRef]
- Sukhorukov, D.; Kreshchik, A.; Sharshin, V.; Sukhorukova, E. Recycling of polymer materials for foundry patterns. IOP Conf. Series Mater. Sci. Eng. 2020, 919, 062037. [Google Scholar] [CrossRef]
- ASTM. ASTM F2792-12a-Standard Terminology for Additive Manufacturing Technologies. Rapid Manuf. Assoc. 2013, 10–12. [Google Scholar] [CrossRef]
- Gokuldoss, P.K.; Kolla, S.; Eckert, J. Additive Manufacturing Processes: Selective Laser Melting, Electron Beam Melting and Binder Jetting—Selection Guidelines. Materials. 2017, 10, 672. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mostafaei, A.; Elliott, A.M.; Barnes, J.E.; Li, F.; Tan, W.; Cramer, C.L.; Nandwana, P.; Chmielus, M. Binder jet 3D printing—Process parameters, materials, properties, modeling, and challenges. Prog. Mater. Sci. 2021, 119, 100707. [Google Scholar] [CrossRef]
- Türka, D.A.; Triebea, L.; Meboldta, M. Combining Additive Manufacturing with Advanced Composites for Highly Inte-grated Robotic Structures. Procedia. CIRP 2016, 50, 402–407. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J.; Blickle, A.; King, T.; Leitzbach, O.; Guenther, D.; Mattern, H.; König, M. BIM for 3D Printing in Construction. In Building Information Modeling; Springer Science and Business Media LLC: Berlin, Germany, 2018; pp. 421–446. [Google Scholar]
- Jipa, A.; Meibodi, M.A.; Giesecke, R.; Shammas, D.; Leschok, M.; Bernhard, M.; Dillenburger, B. 3D-Printed Formwork for Prefabricated Concrete Slabs. In Proceedings of the 1st International Conference on 3D Construction Printing (3DcP), Melbourne, Australia, 26–28 November 2018. [Google Scholar]
- Sama, S.R.; Badamo, T.; Manogharan, G. Case Studies on Integrating 3D Sand-Printing Technology into the Production Portfolio of a Sand-Casting Foundry. Int. J. Met. 2020, 14, 12–24. [Google Scholar] [CrossRef]
- Stegmaier, G. Zu 90 Prozent kein BMW-Motor. Auto-Motor-und-Sport Zeitung. Available online: https://www.auto-motor-und-sport.de/tech-zukunft/bmw-m3-motor-2020-sechszylinder-biturbo/ (accessed on 16 July 2021).
- Recknagel, U.; Dahlmann, M. Spezialsande—Formgrundstoffe für die moderne Kern- und Formherstellung. Giesserei. Rund-Schau. 2009, 56, 9–17. [Google Scholar]
- Günther, D.; Mögele, F. Additive Manufacturing of Casting Tools Using Powder-Binder- Jetting Technology. In Igor V. Shishkovsky. New Trends in 3D Printing; IntechOpen: London, UK, 2016; pp. 53–86. [Google Scholar]
- Rao, P.N. Forming & Welding, Foundry. In Manufacturing Technology, 2nd ed.; Tata McGraw-Hill Pub.: New Delhi, India, 1998. [Google Scholar]
- Wang, X. Thermal, Physical, and Mechanical Properties of Raw Sands and Sand Cores for Aluminum Casting. Master’s Thesis, The University of Leoben, Leoben, Austria, 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Testing Method | Standard |
|---|---|
| 3-point flexure test | VDG P71 |
| Compression test | DIN EN ISO 126 |
| Dimensional accuracy | DIN 862 |
| Permeability test | VDG P41 |
| Density determination | DIN 862, DIN 8128-1 |
| Roughness measurement | ISO 4288 |
| Material Combination |
Average Max. Force [N] |
Average Sliding Force [N] | (Static Friction) | (Dynamic Friction) | |
|---|---|---|---|---|---|
| Material A | Material B | ||||
| UD CF-PA | Teflon | 4.78 | 3.06 | 0.243 | 0.156 |
| UD CF-PA | Aluminium | 6.91 | 5.08 | 0.352 | 0.259 |
| UD CF-PA | UD CF-PA | 4.68 | 3.7 | 0.238 | 0.189 |
| Teflon | Aluminium | 8.71 | 6.3 | 0.444 | 0.321 |
| rCF_PA | Teflon | 5.89 | 4.35 | 0.300 | 0.222 |
| rCF_PA | Aluminium | 12.37 | 7.02 | 0.624 | 0.358 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Günther, D.; Erhard, P.; Schwab, S.; Taha, I. 3D Printed Sand Tools for Thermoforming Applications of Carbon Fiber Reinforced Composites—A Perspective. Materials 2021, 14, 4639. https://doi.org/10.3390/ma14164639
Günther D, Erhard P, Schwab S, Taha I. 3D Printed Sand Tools for Thermoforming Applications of Carbon Fiber Reinforced Composites—A Perspective. Materials. 2021; 14(16):4639. https://doi.org/10.3390/ma14164639
Chicago/Turabian StyleGünther, Daniel, Patricia Erhard, Simon Schwab, and Iman Taha. 2021. "3D Printed Sand Tools for Thermoforming Applications of Carbon Fiber Reinforced Composites—A Perspective" Materials 14, no. 16: 4639. https://doi.org/10.3390/ma14164639
APA StyleGünther, D., Erhard, P., Schwab, S., & Taha, I. (2021). 3D Printed Sand Tools for Thermoforming Applications of Carbon Fiber Reinforced Composites—A Perspective. Materials, 14(16), 4639. https://doi.org/10.3390/ma14164639