
The Influence of Mathematical Definitions on Patellar Kinematics Representations

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
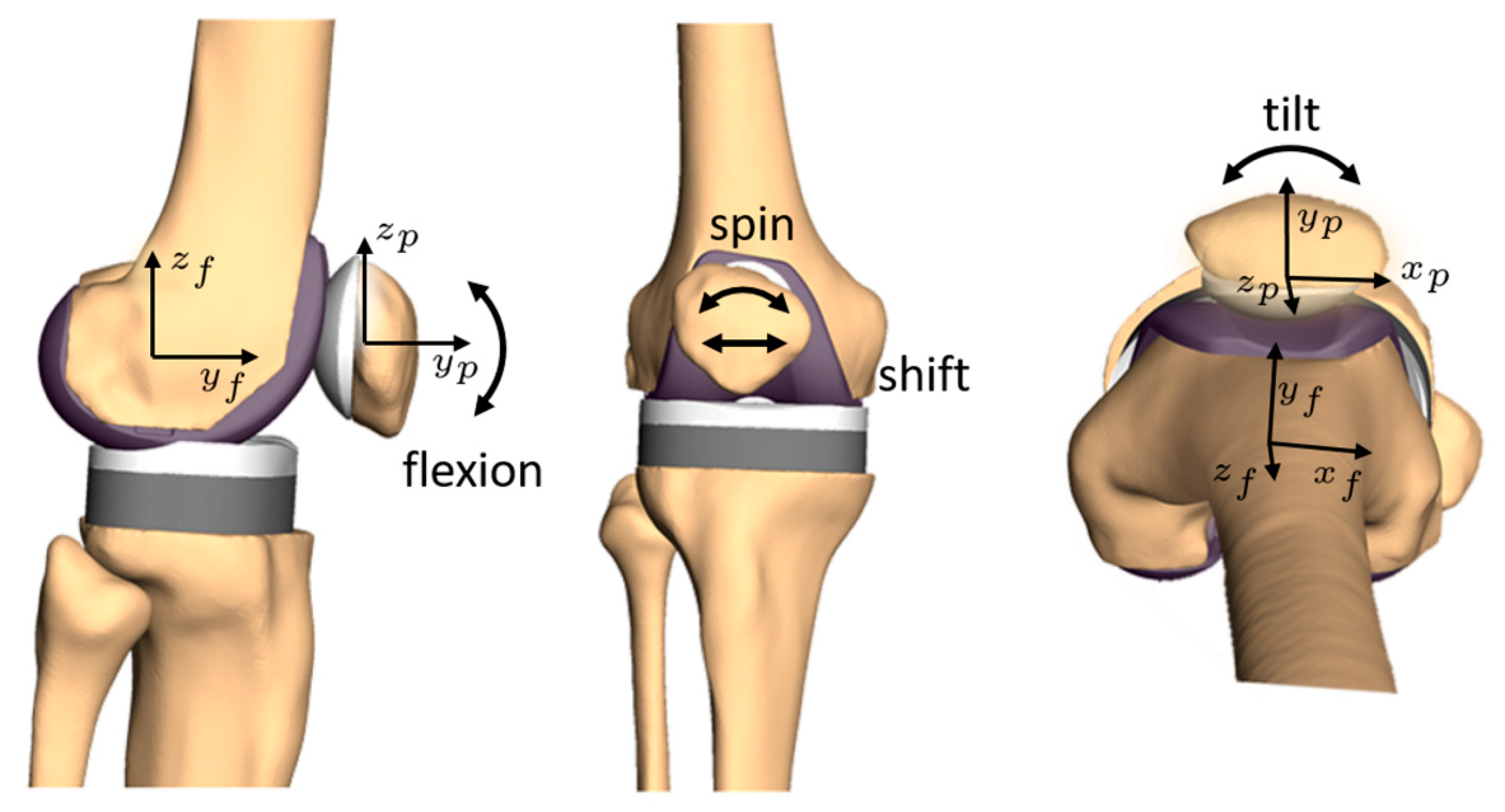
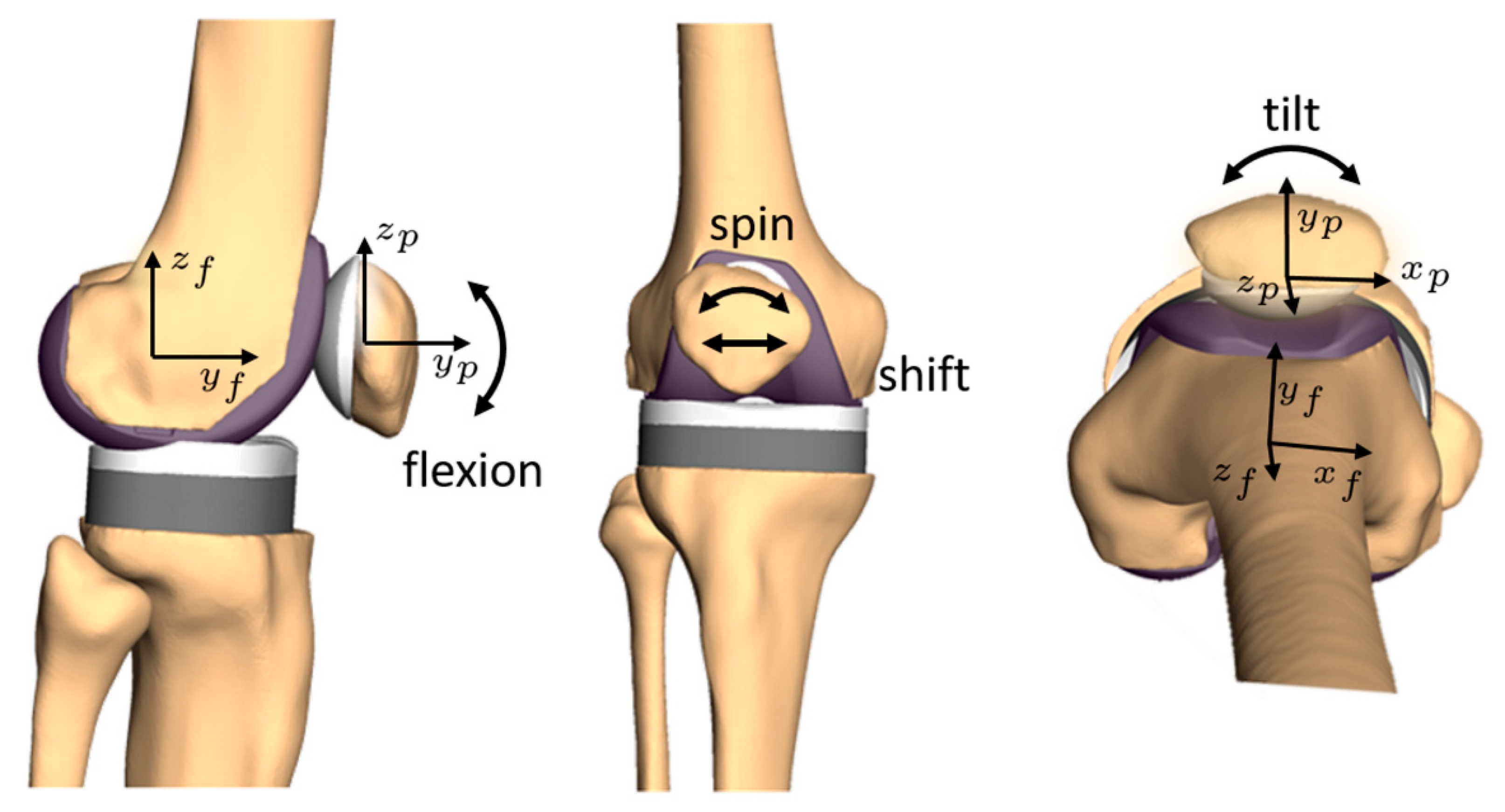
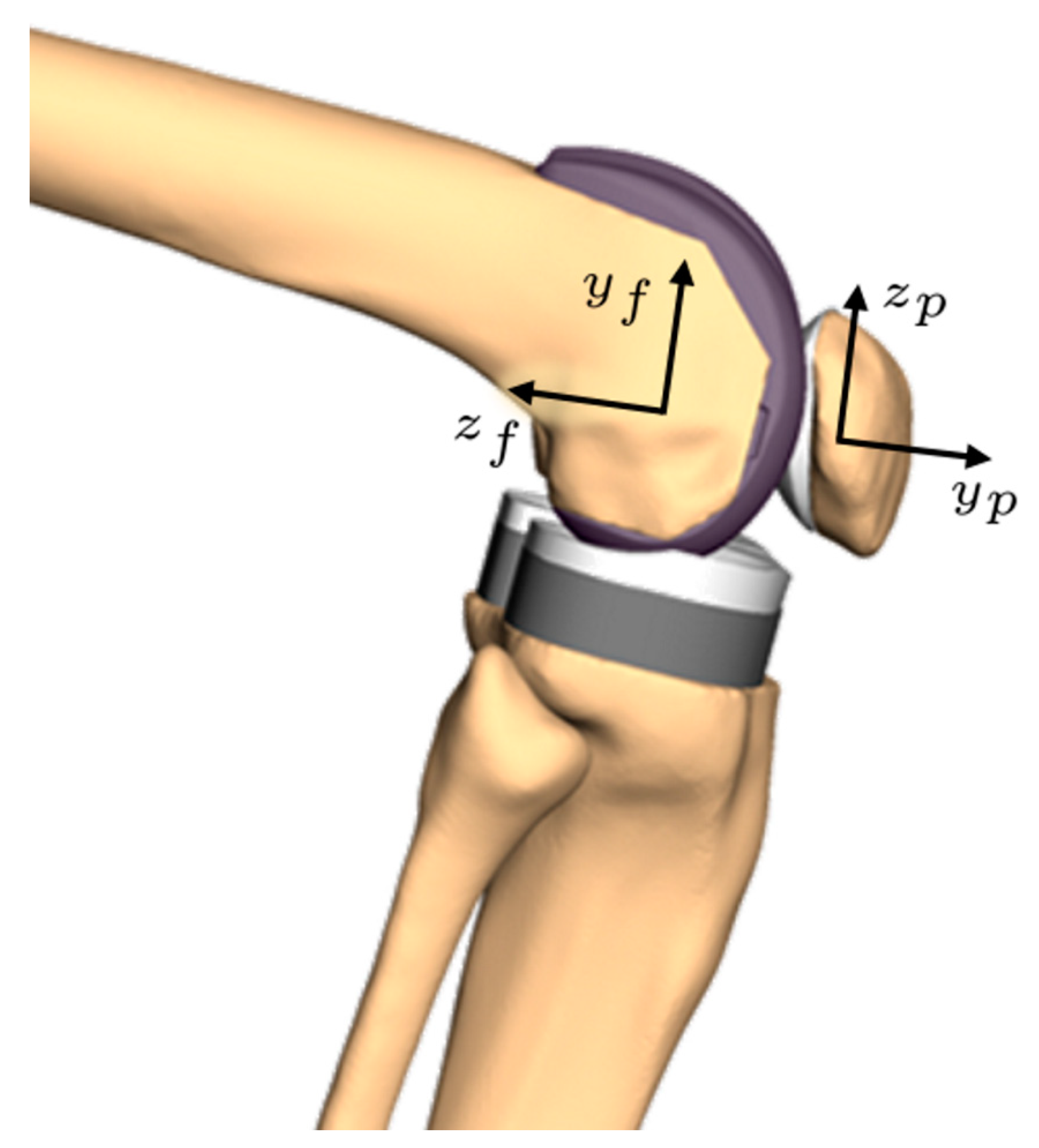
2.1. Coordinates and Definitions
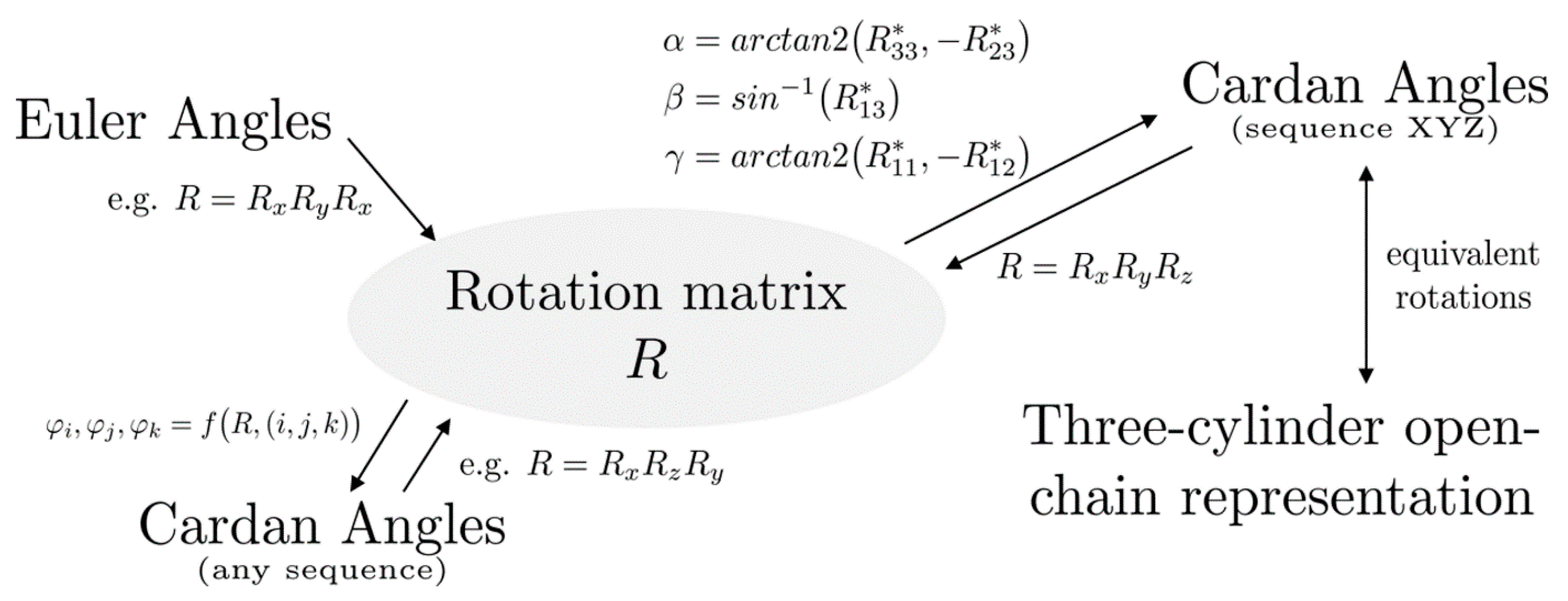
2.2. How Rotations Can Be Described
2.3. Conversions
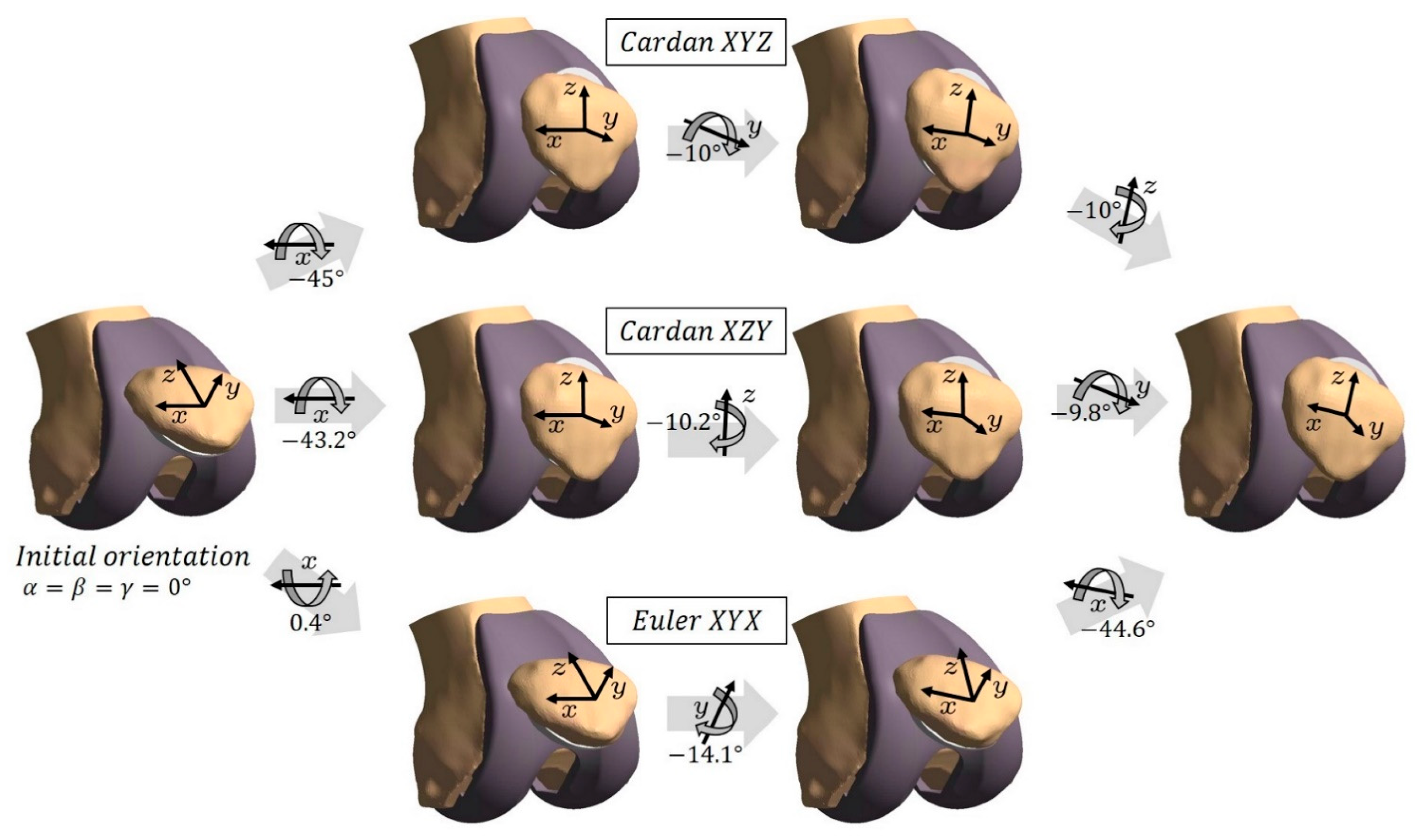
2.3.1. Rotation Sequences
2.3.2. Projected Angles
2.3.3. Helical Axes
2.3.4. Three-Cylinder Open-Chain Representation
2.4. Data Processing and Validation
3. Results
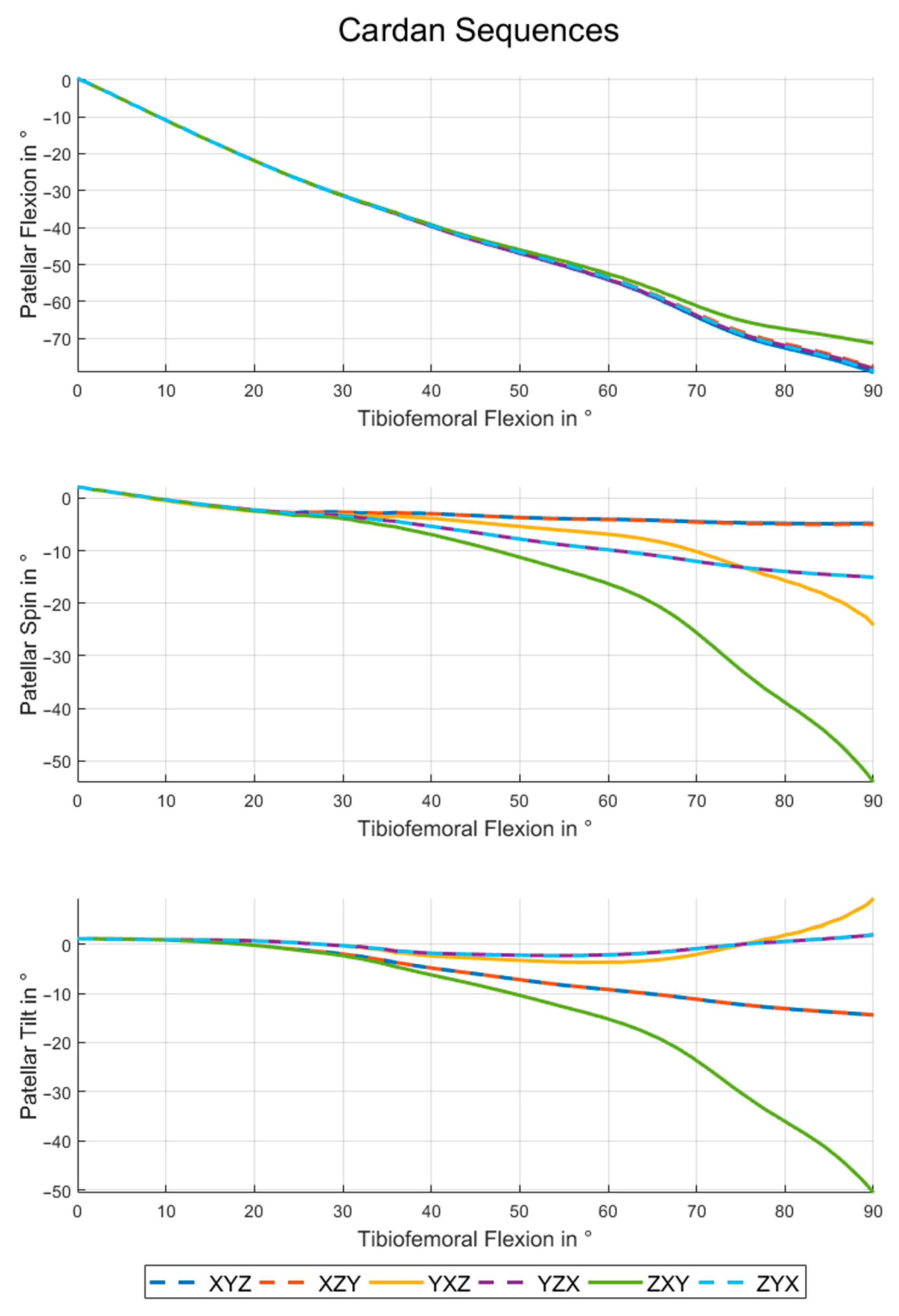
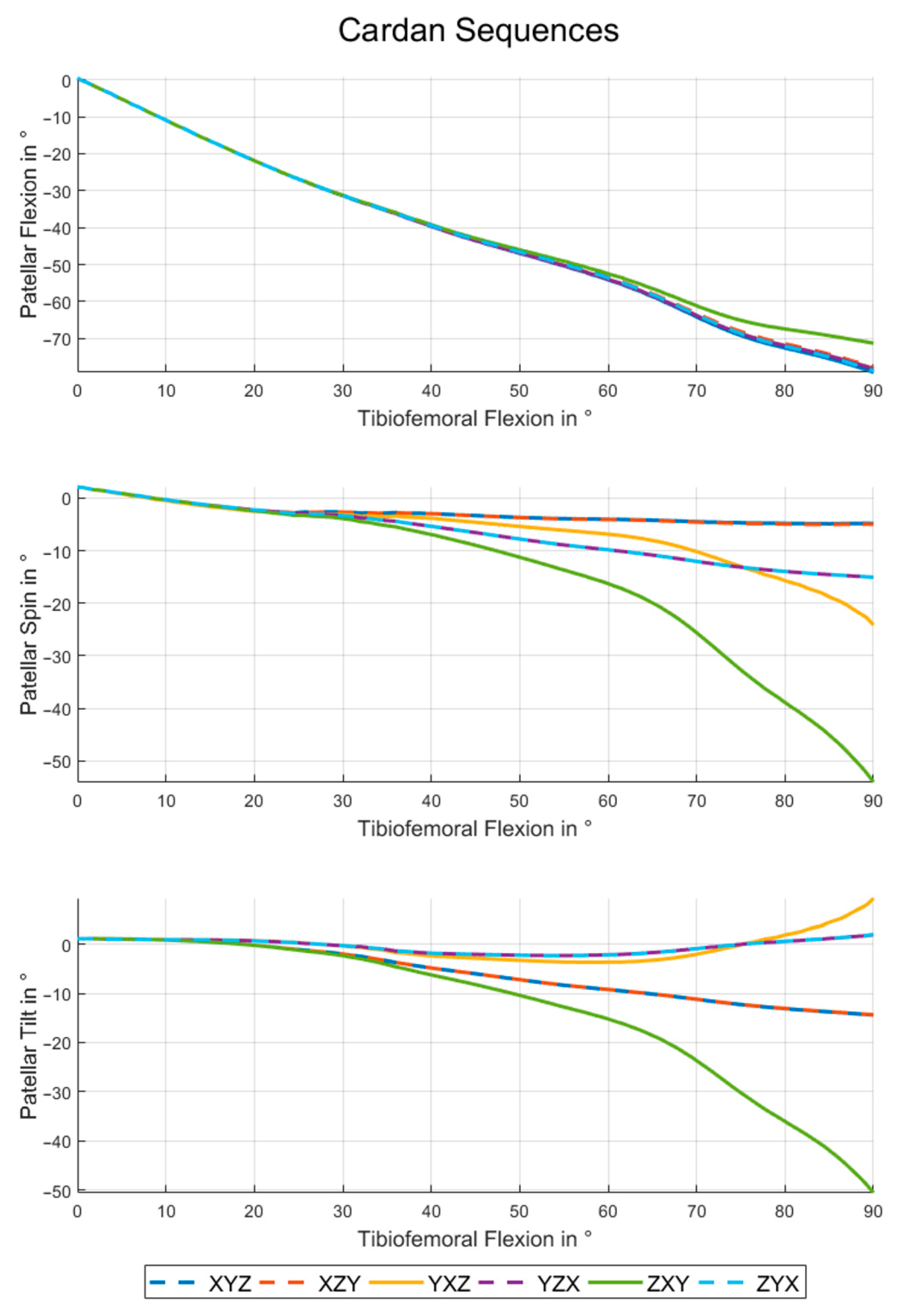
3.1. Cardan Angles
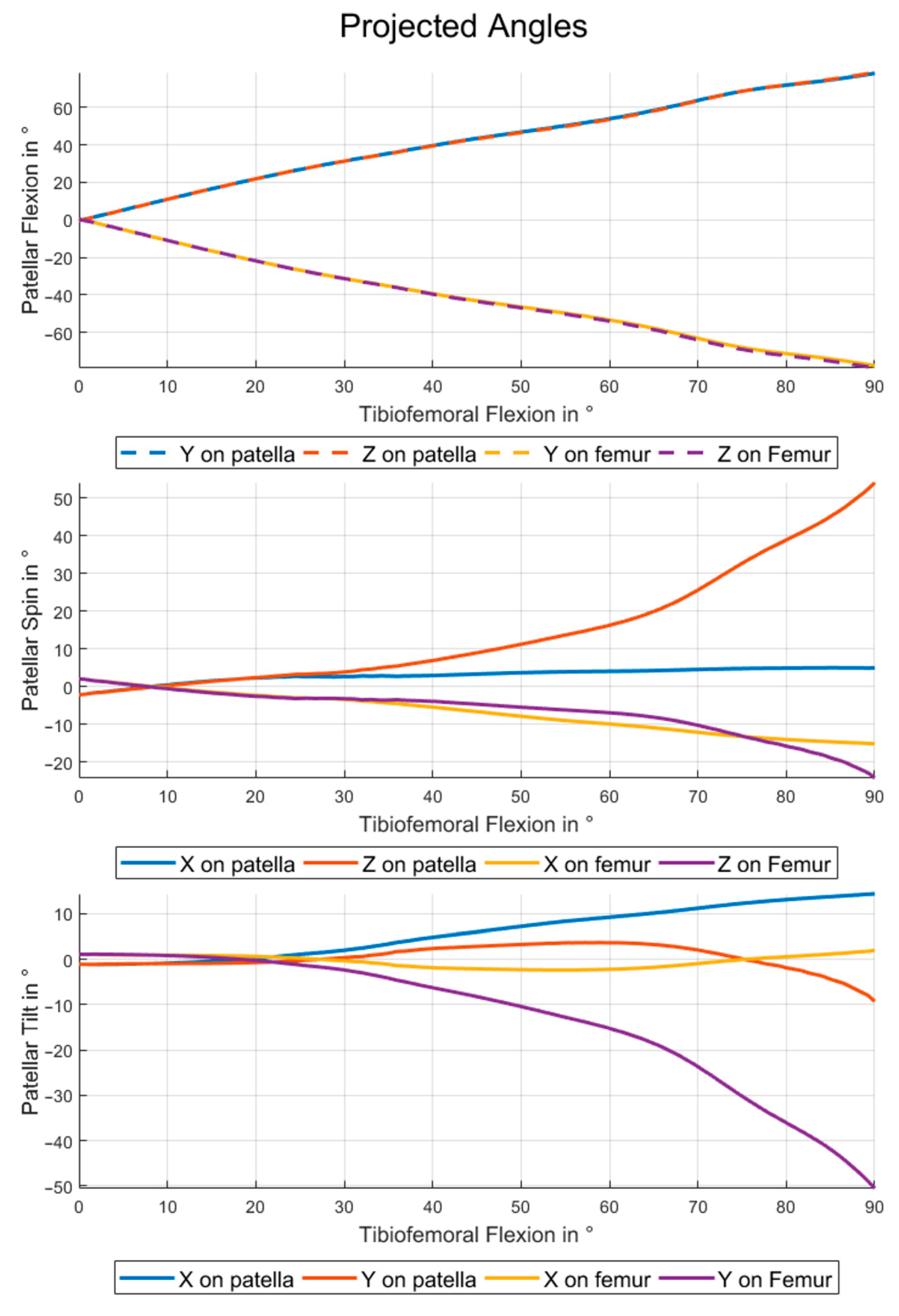
3.2. Projected Angles
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smith, B.E.; Selfe, J.; Thacker, D.; Hendrick, P.; Bateman, M.; Moffatt, F.; Rathleff, M.S.; Smith, T.O.; Logan, P. Incidence and prevalence of patellofemoral pain: A systematic review and meta-analysis. PLoS ONE 2018, 13, e0190892. [Google Scholar] [CrossRef] [Green Version]
- Parvizi, J.; Rapuri, V.R.; Saleh, K.J.; Kuskowski, M.A.; Sharkey, P.F.; Mont, M.A. Failure to resurface the patella during total knee arthroplasty may result in more knee pain and secondary surgery. Clin. Orthop. Relat. Res. 2005, 438, 191–196. [Google Scholar] [CrossRef]
- Steinbruck, A.; Schröder, C.; Woiczinski, M.; Muller, T.; Muller, P.E.; Jansson, V.; Fottner, A. Influence of tibial rotation in total knee arthroplasty on knee kinematics and retropatellar pressure: An in vitro study. Knee Surg. Sports Traumatol. Arthrosc. 2016, 24, 2395–2401. [Google Scholar] [CrossRef]
- Powers, C.M.; Witvrouw, E.; Davis, I.S.; Crossley, K.M. Evidence-based framework for a pathomechanical model of patellofemoral pain: 2017 patellofemoral pain consensus statement from the 4th International Patellofemoral Pain Research Retreat, Manchester, UK: Part 3. Br. J. Sports Med. 2017, 51, 1713–1723. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wheatley, M.G.A.; Rainbow, M.J.; Clouthier, A.L. Patellofemoral Mechanics: A Review of Pathomechanics and Research Approaches. Curr. Rev. Musculoskelet. Med. 2020, 13, 326–337. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Yao, J.; Wang, X.; Xin, X.; Zhang, K.; Cai, H.; Fan, Y.; Yang, B. Research Methods and Progress of Patellofemoral Joint Kinematics: A Review. J. Healthc. Eng. 2019, 2019, 9159267. [Google Scholar] [CrossRef] [Green Version]
- Katchburian, M.V.; Bull, A.M.J.; Shih, Y.-F.; Heatley, F.W.; Amis, A.A. Measurement of patellar tracking: Assessment and analysis of the literature. Clin. Orthop. Relat. Res. 2003, 412, 241–259. [Google Scholar] [CrossRef] [PubMed]
- Chew, J.T.; Stewart, N.J.; Hanssen, A.D.; Luo, Z.-P.; Rand, J.A.; An, K.-N. Differences in Patellar Tracking and Knee Kinematics Among Three Different Total Knee Designs. Clin. Orthop. Relat. Res. 1997, 345, 87–98. [Google Scholar] [CrossRef]
- Nakamura, S.; Tanaka, Y.; Kuriyama, S.; Nishitani, K.; Ito, H.; Furu, M.; Matsuda, S. Superior-inferior position of patellar component affects patellofemoral kinematics and contact forces in computer simulation. Clin. Biomech. 2017, 45, 19–24. [Google Scholar] [CrossRef]
- Sakai, N.; Luo, Z.-P.; Rand, J.A.; An, K.-N. The effects of tibial rotation on patellar position. Knee 1994, 1, 133–138. [Google Scholar] [CrossRef]
- Sakai, N.; Luo, Z.-P.; Rand, J.A.; An, K.-N. Quadriceps forces and patellar motion in the anatomical model of the patellofemoral joint. Knee 1996, 3, 1–7. [Google Scholar] [CrossRef]
- Sakai, N.; Luo, Z.-P.; Rand, J.A.; An, K.-N. The influence of weakness in the vastus medialis oblique muscle on the patellofemoral joint: An in vitro biomechanical study. Clin. Biomech. 2000, 15, 335–339. [Google Scholar] [CrossRef]
- Wu, G.; Cavanagh, P.R. ISB recommendations for standardization in the reporting of kinematic data. J. Biomech. 1995, 28, 1257–1261. [Google Scholar] [CrossRef]
- Wu, G.; Siegler, S.; Allard, P.; Kirtley, C.; Leardini, A.; Rosenbaum, D.; Whittle, M.; D’Lima, D.D.; Christofolini, L.; Witte, H.; et al. ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion: Part I: Ankle, hip, and spine. J. Biomech. 2002, 35, 543–548. [Google Scholar] [CrossRef]
- Wu, G.; van der Helm, F.C.T.; Veeger, H.E.J.D.; Makhsous, M.; van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion--Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef]
- Hefzy, M.S.; Jackson, W.T.; Saddemi, S.R.; Hsieh, Y.-F. Effects of tibial rotations on patellar tracking and patello-femoral contact areas. J. Biomed. Eng. 1992, 14, 329–343. [Google Scholar] [CrossRef]
- Bull, A.M.J.; Katchburian, M.V.; Shih, Y.-F.; Amis, A.A. Standardisation of the description of patellofemoral motion and comparison between different techniques. Knee Surg. Sports Traumatol. Arthrosc. 2002, 10, 184–193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grood, E.S.; Suntay, W.J. A joint coordinate system for the clinical description of three-dimensional motions: Application to the knee. J. Biomech. Eng. 1983, 105, 136–144. [Google Scholar] [CrossRef]
- Innocenti, B.; Bori, E.; Piccolo, S. Development and validation of a robust patellar reference coordinate system for biomechanical and clinical studies. Knee 2020, 27, 81–88. [Google Scholar] [CrossRef]
- Kebbach, M.; Darowski, M.; Krueger, S.; Schilling, C.; Grupp, T.M.; Bader, R.; Geier, A. Musculoskeletal Multibody Simulation Analysis on the Impact of Patellar Component Design and Positioning on Joint Dynamics after Unconstrained Total Knee Arthroplasty. Materials 2020, 13, 2365. [Google Scholar] [CrossRef]
- Tischer, T.; Geier, A.; Lenz, R.; Woernle, C.; Bader, R. Impact of the patella height on the strain pattern of the medial patellofemoral ligament after reconstruction: A computer model-based study. Knee Surg. Sports Traumatol. Arthrosc. 2017, 25, 3123–3133. [Google Scholar] [CrossRef]
- Woiczinski, M.; Steinbruck, A.; Weber, P.; Muller, P.E.; Jansson, V.; Schröder, C. Development and validation of a weight-bearing finite element model for total knee replacement. Comput. Methods Biomech. Biomed. Engin. 2016, 19, 1033–1045. [Google Scholar] [CrossRef]
- Ahmed, A.M.; Duncan, N.A.; Tanzer, M. In Vitro Measurement of the Tracking Pattern of the Human Patella. J. Biomech. Eng. 1999, 121, 222–228. [Google Scholar] [CrossRef]
- Hirokawa, S. Three-dimensional mathematical model analysis of the patellofemoral joint. J. Biomech. 1991, 24, 659–671. [Google Scholar] [CrossRef]
- Hsu, H.-C.; Luo, Z.-P.; Rand, J.A.; An, K.-N. Influence of lateral release on patellar tracking and patellofemoral contact characteristics after total knee arthroplasty. J. Arthroplasty 1997, 12, 74–83. [Google Scholar] [CrossRef]
- Koh, T.J.; Grabiner, M.D.; Swart, R.J.de. In vivo tracking of the human patella. J. Biomech. 1992, 25, 637–643. [Google Scholar] [CrossRef]
- Lin, F.; Makhsous, M.; Chang, A.H.; Hendrix, R.W.; Zhang, L.-Q. In vivo and noninvasive six degrees of freedom patellar tracking during voluntary knee movement. Clin. Biomech. 2003, 18, 401–409. [Google Scholar] [CrossRef]
- Anglin, C.; Ho, K.C.T.; Briard, J.-L.; de Lambilly, C.; Plaskos, C.; Nodwell, E.; Stindel, E. In vivo patellar kinematics during total knee arthroplasty. Comput. Aided Surg. 2008, 13, 377–391. [Google Scholar] [CrossRef]
- Ali, A.A.; Mannen, E.M.; Rullkoetter, P.J.; Shelburne, K.B. In vivo comparison of medialized dome and anatomic patellofemoral geometries using subject-specific computational modeling. J. Orthop. Res. 2018, 36, 1910–1918. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Wang, C.J. Influence of patellar implantation on the patellofemoral joint of an anatomic customised total knee replacement implant: A case study. Proc. Inst. Mech. Eng. H 2020, 234, 1370–1383. [Google Scholar] [CrossRef] [PubMed]
- Woernle, C. Mehrkörpersysteme; Springer: Berlin, Heidelberg, 2011; ISBN 978-3-642-15981-7. [Google Scholar]
- Nigg, B.M. Biomechanics of the Musculo-Skeletal System, 2nd ed.; Wiley: Chichester, UK, 2002; ISBN 9780471978183. [Google Scholar]
- Hemingway, E.G.; O’Reilly, O.M. Perspectives on Euler angle singularities, gimbal lock, and the orthogonality of applied forces and applied moments. Multibody Syst. Dyn. 2018, 44, 31–56. [Google Scholar] [CrossRef]
- Cheung, R.T.H.; Mok, N.W.; Chung, P.Y.M.; Ng, G.Y.F. Non-invasive measurement of the patellofemoral movements during knee extension-flexion: A validation study. Knee 2013, 20, 213–217. [Google Scholar] [CrossRef] [PubMed]
- Dagneaux, L.; Thoreux, P.; Eustache, B.; Canovas, F.; Skalli, W. Sequential 3D analysis of patellofemoral kinematics from biplanar x-rays: In vitro validation protocol. Orthop. Traumatol. Surg. Res. 2015, 101, 811–818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Merican, A.M.; Amis, A.A. Iliotibial band tension affects patellofemoral and tibiofemoral kinematics. J. Biomech. 2009, 42, 1539–1546. [Google Scholar] [CrossRef] [PubMed]
- MacWilliams, B.A.; Davis, R.B. Addressing some misperceptions of the joint coordinate system. J. Biomech. Eng. 2013, 135, 54506. [Google Scholar] [CrossRef]
- Lees, A.; Barton, G.; Robinson, M. The influence of Cardan rotation sequence on angular orientation data for the lower limb in the soccer kick. J. Sports Sci. 2010, 28, 445–450. [Google Scholar] [CrossRef]
- Sinclair, J.; Hebron, J.; Hurst, H.; Taylor, P. The influence of different Cardan sequences on three-dimensional cycling kinematics. Hum. Mov. 2013, 14, 334–339. [Google Scholar] [CrossRef]
- Ahmad, C.S.; Kwak, S.D.; Ateshian, G.A.; Warden, W.H.; Steadman, J.R.; Mow, V.C. Effects of patellar tendon adhesion to the anterior tibia on knee mechanics. Am. J. Sports Med. 1998, 26, 715–724. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, T.; Hosseini, A.; Li, J.-S.; Gill, T.J.; Li, G. In vivo patellar tracking and patellofemoral cartilage contacts during dynamic stair ascending. J. Biomech. 2012, 45, 2432–2437. [Google Scholar] [CrossRef] [Green Version]
- Yeadon, M.R. The simulation of aerial movement—I. The determination of orientation angles from film data. J. Biomech. 1990, 23, 59–66. [Google Scholar] [CrossRef] [Green Version]
- Sagan, B.E. The Symmetric Group: Representations, Combinatorial Algorithms, and Symmetric Functions, 2nd ed.; Springer: New York, NY, USA, 2010; ISBN 9781441928696. [Google Scholar]
- Geier, A.; Aschemann, H.; Lima, D.D.; Woernle, C.; Bader, R. Force Closure Mechanism Modeling for Musculoskeletal Multibody Simulation. IEEE Trans. Biomed. Eng. 2018, 65, 2471–2482. [Google Scholar] [CrossRef]
- Gale, T.; Anderst, W. Tibiofemoral helical axis of motion during the full gait cycle measured using biplane radiography. Med. Eng. Phys. 2020, 86, 65–70. [Google Scholar] [CrossRef]
- Kwak, S.D.; Ahmad, C.S.; Gardner, T.R.; Grelsamer, R.P.; Henry, J.H.; Blankevoort, L.; Ateshian, G.A.; Mow, V.C. Hamstrings and iliotibial band forces affect knee kinematics and contact pattern. J. Orthop. Res. 2000, 18, 101–108. [Google Scholar] [CrossRef]
- Yao, J.; Yang, B.; Niu, W.; Zhou, J.; Wang, Y.; Gong, H.; Ma, H.; Tan, R.; Fan, Y. In vivo measurements of patellar tracking and finite helical axis using a static magnetic resonance based methodology. Med. Eng. Phys. 2014, 36, 1611–1617. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, O. Des lois géométriques qui régissent les déplacements d’unsystème solide dans l’espace, et de la variation des coordonnéesprovenant de ces déplacements considérés indépendammentdes causes qui peuvent les produire. J. Math. Pures Appl. 1840, 5, 380–440. (In French) [Google Scholar]
- Bottema, O.; Roth, B. Theoretical Kinematics; Dover Publ: New York, NY, USA, 1990; ISBN 9780486663463. [Google Scholar]
- Chirikjian, G.S.; Kyatkin, A.B. Engineering Applications of Noncommutative Harmonic Analysis: With Emphasis on Rotation and Motion Groups; CRC Press: Boca Raton, FL, USA, 2001; ISBN 9780849307485. [Google Scholar]
- Woltring, H.J. 3-D attitude representation of human joints: A standardization proposal. J. Biomech. 1994, 27, 1399–1414. [Google Scholar] [CrossRef]
- Fick, C.N.; Jiménez-Silva, R.; Sheehan, F.T.; Grant, C. Patellofemoral kinematics in patellofemoral pain syndrome: The influence of demographic factors. J. Biomech. 2021, 130, 110819. [Google Scholar] [CrossRef] [PubMed]
- Ward, S.R.; Powers, C.M. The influence of patella alta on patellofemoral joint stress during normal and fast walking. Clin. Biomech. 2004, 19, 1040–1047. [Google Scholar] [CrossRef]
- Pal, S.; Besier, T.F.; Beaupre, G.S.; Fredericson, M.; Delp, S.L.; Gold, G.E. Patellar maltracking is prevalent among patellofemoral pain subjects with patella alta: An upright, weightbearing MRI study. J. Orthop. Res. 2013, 31, 448–457. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, A.; Boden, B.P.; Grant, C.; Carlson, V.R.; Alter, K.E.; Sheehan, F.T. Adolescents and adults with patellofemoral pain exhibit distinct patellar maltracking patterns. Clin. Biomech. 2021, 90, 105481. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| XYZ | XZY | YXZ | YZX | ZXY | ZYX | Y on Patella | Z on Patella | Y on Femur | Z on Femur | |
|---|---|---|---|---|---|---|---|---|---|---|
| XYZ | 0 | - | - | - | - | - | - | - | - | - |
| XZY | 0.79 | 0 | - | - | - | - | - | - | - | - |
| YXZ | 0.46 | 0.36 | 0 | - | - | - | - | - | - | - |
| YZX | 0.43 | 0.4 | 0.05 | 0 | - | - | - | - | - | - |
| ZXY | 3.71 | 2.96 | 3.25 | 3.28 | 0 | - | - | - | - | - |
| ZYX | 0.39 | 0.44 | 0.26 | 0.25 | 3.4 | 0 | - | - | - | - |
| Y on patella | 111.48 | 110.71 | 111.06 | 111.09 | 108.11 | 111.1 | 0 | - | - | - |
| Z on patella | 111.49 | 110.72 | 111.07 | 111.1 | 108.12 | 111.12 | 0.25 | 0 | - | - |
| Y on femur | 0.79 | 0 | 0.36 | 0.4 | 2.96 | 0.44 | 110.71 | 110.72 | 0 | - |
| Z on femur | 0 | 0.79 | 0.46 | 0.43 | 3.71 | 0.39 | 111.48 | 111.49 | 0.79 | 0 |
| XYZ | XZY | YXZ | YZX | ZXY | ZYX | X on Patella | Z on Patella | X on Femur | Z on Femur | |
|---|---|---|---|---|---|---|---|---|---|---|
| XYZ | 0 | - | - | - | - | - | - | - | - | - |
| XZY | 0.09 | 0 | - | - | - | - | - | - | - | - |
| YXZ | 8.27 | 8.18 | 0 | - | - | - | - | - | - | - |
| YZX | 6.56 | 6.48 | 3.09 | 0 | - | - | - | - | - | - |
| ZXY | 24.37 | 24.28 | 16.19 | 18.06 | 0 | - | - | - | - | - |
| ZYX | 6.56 | 6.48 | 3.09 | 0.004 | 18.06 | 0 | - | - | - | - |
| X on patella | 7.85 | 7.93 | 15.47 | 14.24 | 31.53 | 14.24 | 0 | - | - | - |
| Z on patella | 31.44 | 31.53 | 39.56 | 37.94 | 55.72 | 37.94 | 24.28 | 0 | - | - |
| X on femur | 6.56 | 6.48 | 3.09 | 0 | 18.06 | 0.004 | 14.24 | 37.94 | 0 | - |
| Z on femur | 8.27 | 8.18 | 0 | 3.09 | 16.19 | 3.09 | 15.47 | 39.56 | 3.09 | 0 |
| XYZ | XZY | YXZ | YZX | ZXY | ZYX | X on Patella | Y on Patella | X on Femur | Y on Femur | |
|---|---|---|---|---|---|---|---|---|---|---|
| XYZ | 0 | - | - | - | - | - | - | - | - | - |
| XZY | 0.03 | 0 | - | - | - | - | - | - | - | - |
| YXZ | 11.07 | 11.04 | 0 | - | - | - | - | - | - | - |
| YZX | 9.64 | 9.61 | 2.27 | 0 | - | - | - | - | - | - |
| ZXY | 16.69 | 16.72 | 27.72 | 26.14 | 0 | - | - | - | - | - |
| ZYX | 9.65 | 9.62 | 2.24 | 0.03 | 26.15 | 0 | - | - | - | - |
| X on patella | 19.36 | 19.33 | 9.38 | 9.92 | 35.39 | 9.91 | 0 | - | - | - |
| Y on patella | 9.38 | 9.35 | 6.79 | 4.67 | 24.45 | 4.7 | 11.07 | 0 | - | - |
| X on femur | 9.65 | 9.62 | 2.24 | 0.03 | 26.15 | 0 | 9.91 | 4.7 | 0 | - |
| Y on femur | 16.69 | 16.72 | 27.72 | 26.14 | 0 | 26.15 | 35.39 | 24.45 | 26.15 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sauer, A.; Kebbach, M.; Maas, A.; Mihalko, W.M.; Grupp, T.M. The Influence of Mathematical Definitions on Patellar Kinematics Representations. Materials 2021, 14, 7644. https://doi.org/10.3390/ma14247644
Sauer A, Kebbach M, Maas A, Mihalko WM, Grupp TM. The Influence of Mathematical Definitions on Patellar Kinematics Representations. Materials. 2021; 14(24):7644. https://doi.org/10.3390/ma14247644
Chicago/Turabian StyleSauer, Adrian, Maeruan Kebbach, Allan Maas, William M. Mihalko, and Thomas M. Grupp. 2021. "The Influence of Mathematical Definitions on Patellar Kinematics Representations" Materials 14, no. 24: 7644. https://doi.org/10.3390/ma14247644
APA StyleSauer, A., Kebbach, M., Maas, A., Mihalko, W. M., & Grupp, T. M. (2021). The Influence of Mathematical Definitions on Patellar Kinematics Representations. Materials, 14(24), 7644. https://doi.org/10.3390/ma14247644