
Application of the Generalized Method of Moving Coordinates to Calculating Stress Fields near an Elliptical Hole


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Equations
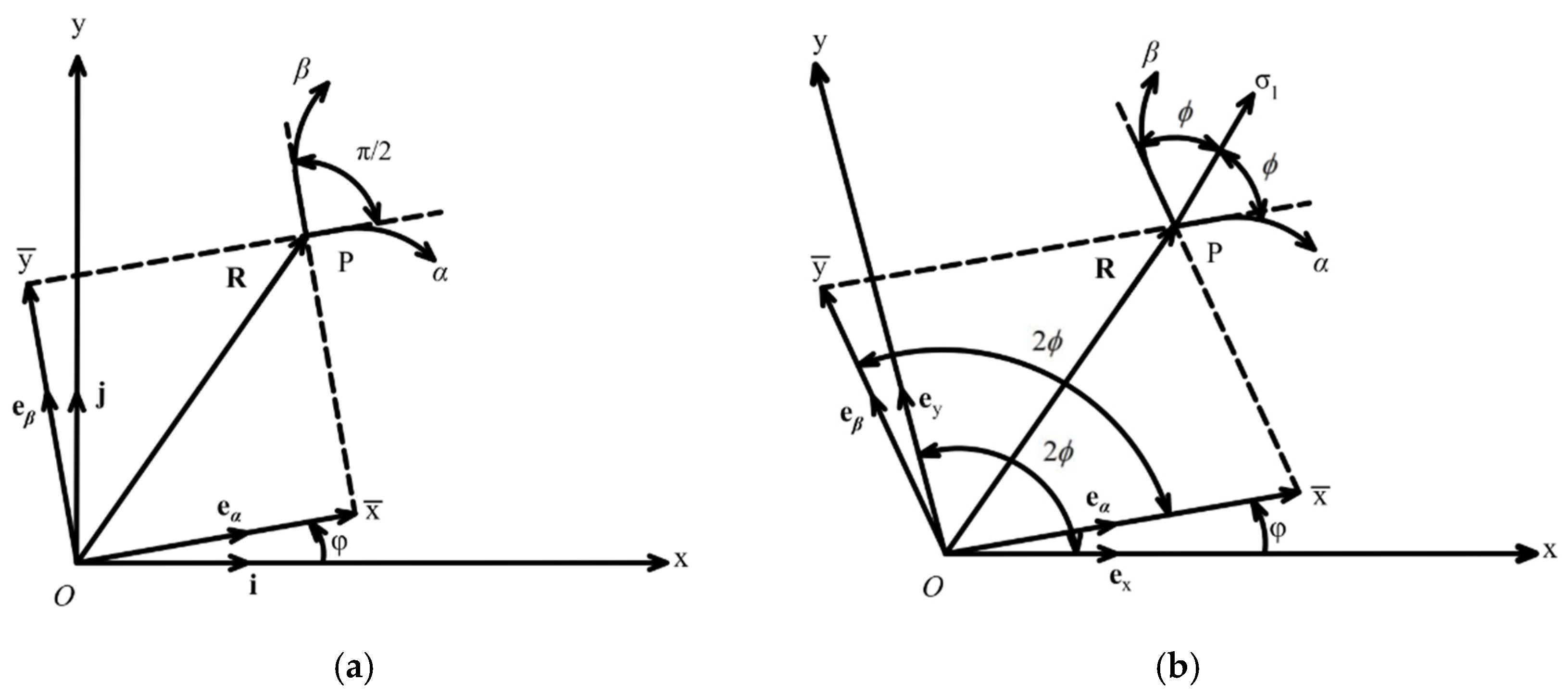
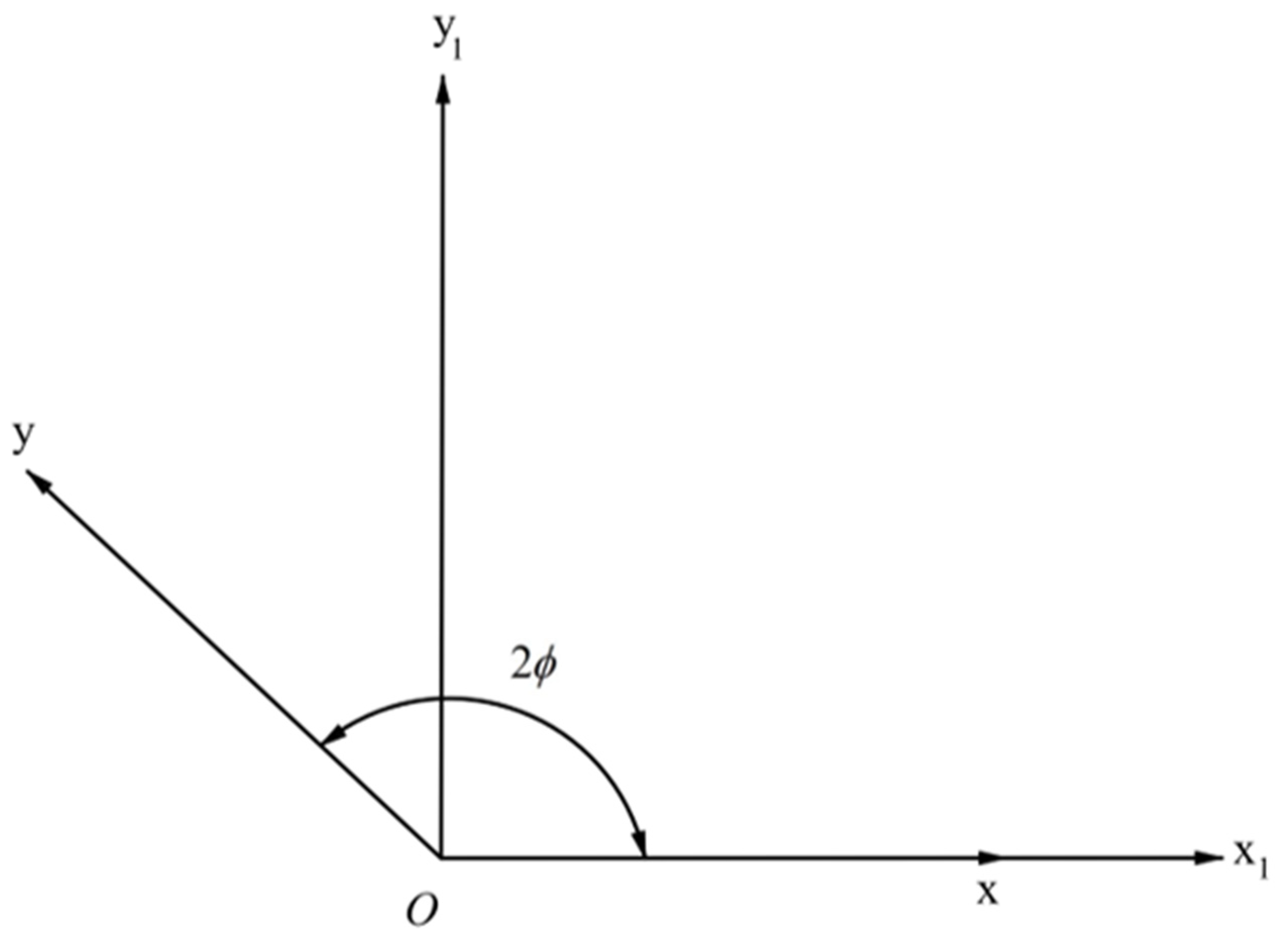
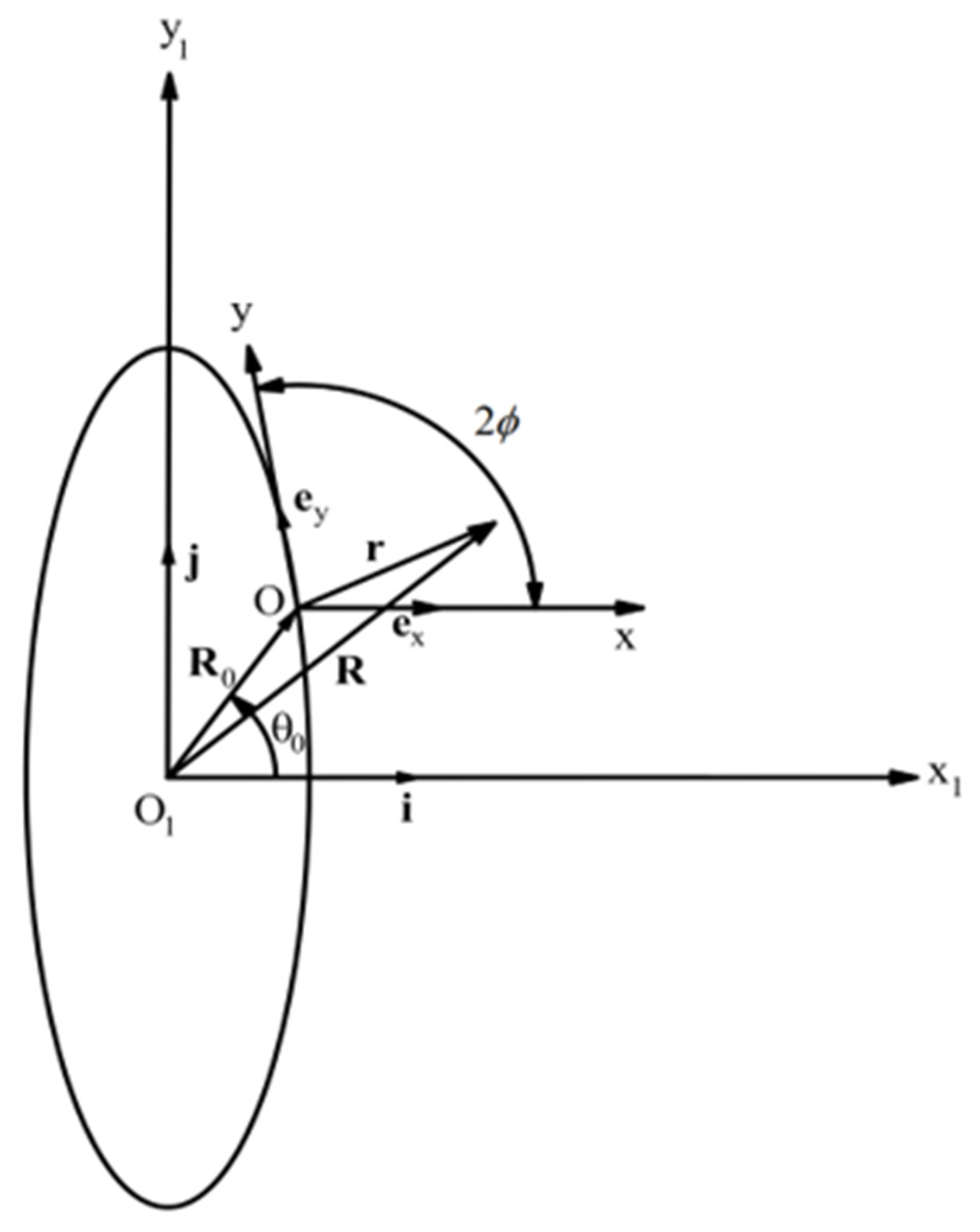
3. Generalized Moving Coordinates
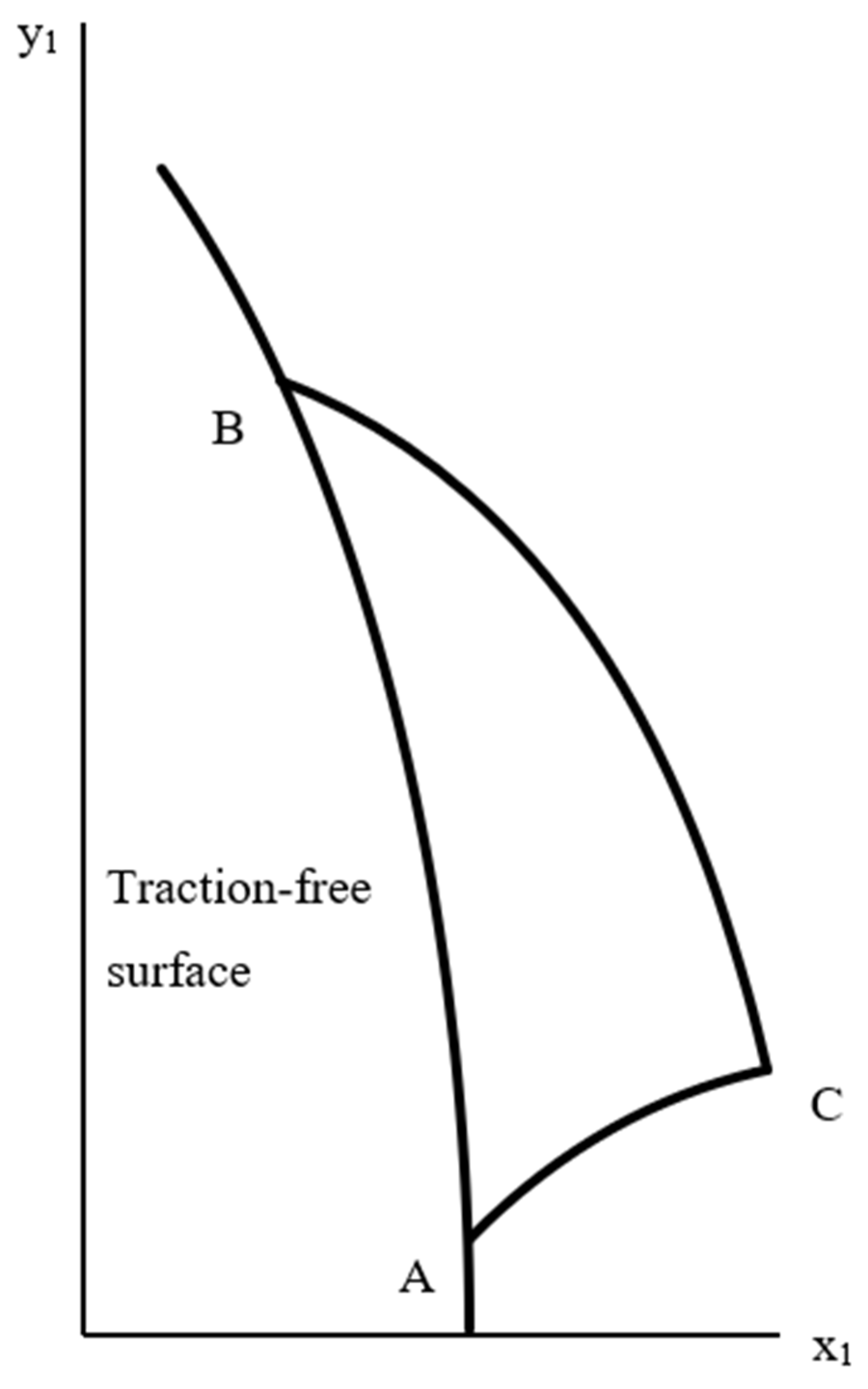
4. Solution near a Traction-Free Surface
5. Numerical Example
6. Conclusions
- (1)
- The generalized method of moving coordinates is efficient for determining stress fields near traction-free surfaces. In particular, determining the stress components at any point of the plastic region requires evaluating one ordinary integral in Equations (51) or (52).
- (2)
- The solutions in Equations (51) and (52) are independent of other boundary conditions, though the shape of the plastic region is.
- (3)
- The solution found is identical to the solution in [5] if λ = 0 in Equation (1).
- (4)
- The parameter λ involved in Equation (1) has a much greater effect on the stress field than the aspect ratio (Figure 5 and Figure 6). However, it is a consequence of the yield criterion. For a given material, the aspect ratio affects the stress distribution in a small region near the hole (Figure 7).
- (5)
- The solution found is for perfectly plastic material. However, slip-line solutions for the class of problems considered agree well with experimental results for strain-hardening materials [25].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Williams, M.L. On the stress distribution at the base of a stationary crack. J. Appl. Mech. 1956, 24, 109–114. [Google Scholar] [CrossRef]
- Rice, J.R. A path independent integral and the approximate analysis of strain concentration by notches and cracks. J. Appl. Mech. 1968, 35, 379–386. [Google Scholar] [CrossRef]
- Li, J.; Hancock, J.W. Mode I and mixed mode fields with incomplete crack tip plasticity. Int. J. Solids Struct. 1999, 36, 711–725. [Google Scholar] [CrossRef]
- Papanastasiou, P.; Durban, D. Singular plastic fields in non-associative pressure sensitive solids. Int. J. Solids Struct. 2001, 38, 1539–1550. [Google Scholar] [CrossRef]
- Thomason, P.F. Riemann-Integral solutions for the plastic slip-line fields around elliptical holes. J. Appl. Mech. 1978, 45, 678–679. [Google Scholar] [CrossRef]
- Thomason, P.F. Ductile fracture and the stability of incompressible plasticity in the presence of microvoids. Acta Metall. 1981, 29, 763–777. [Google Scholar] [CrossRef]
- Zhang, A.B.; Wang, B.L. Explicit solutions of an elliptic hole or a crack problem in thermoelectric materials. Eng. Fract. Mech. 2016, 151, 11–21. [Google Scholar] [CrossRef]
- Zhang, A.B.; Wang, B.L.; Wang, J.; Du, J.K. Two-dimensional problem of thermoelectric materials with an elliptic hole or a rigid inclusion. Int. J. Therm. Sci. 2017, 117, 184–195. [Google Scholar] [CrossRef]
- Tuna, M.; Trovalusci, P. Stress distribution around an elliptic hole in a plate with ‘implicit’ and ‘explicit’ non-local models. Compos. Struct. 2021, 256, 113003. [Google Scholar] [CrossRef]
- Ostsemin, A.A.; Utkin, P.B. Stress-strain state and stress intensity factors of an inclined elliptic defect in a plate under biaxial loading. Mech. Solids 2010, 45, 214–225. [Google Scholar] [CrossRef]
- Wang, W.; Yuan, H.; Li, X.; Shi, P. Stress concentration and damage factor due to central elliptical hole in functionally graded panels subjected to uniform tensile traction. Materials 2019, 12, 422. [Google Scholar] [CrossRef]
- Willis, J.R. The stress field around an elliptical crack in an anisotropic elastic medium. Int. J. Eng. Sci. 1968, 6, 253–263. [Google Scholar] [CrossRef]
- Huang, Y.-H.; Yang, S.-Q.; Tian, W.-L. Cracking process of a granite specimen that contains multiple pre-existing holes under uniaxial compression. Fatigue Fract. Eng. Mater. Struct. 2019, 42, 1341–1356. [Google Scholar] [CrossRef]
- Murru, P.T.; Rajagopal, K.R. Stress concentration due to the presence of a hole within the context of elastic bodies. Mat. Des. Process. Commun. 2021, 3, e219. [Google Scholar] [CrossRef]
- Murru, P.T.; Rajagopal, K.R. Stress concentration due to the bi-axial deformation of a plate of a porous elastic body with a hole. Z. Angew. Math. Mech. 2021, 101, e202100103. [Google Scholar] [CrossRef]
- Meyer, M.; Sayir, M.B. The elasto-plastic plate with a hole: Analytical solutions derived by singular perturbations. Z. Angew. Math. Phys. 1995, 46, 427–445. [Google Scholar]
- Yaocai Ma, Y.; Lu, A.; Cai, H. Analytical method for determining the elastoplastic interface of a circular hole subjected to biaxial tension-compression loads. Mech. Based Des. Struct. Mach. 2022, 50, 3206–3223. [Google Scholar] [CrossRef]
- Li, Z.; Mantell, S.C.; Davidson, J.H. Mechanical analysis of streamlined tubes with non-uniform wall thickness for heat exchangers. J. Strain Anal. Eng. Des. 2005, 40, 275–285. [Google Scholar] [CrossRef]
- Jafari Fesharaki, J.; Roghani, M. Mechanical behavior and optimization of functionally graded hollow cylinder with an elliptic hole. Mech. Adv. Compos. Struct. 2020, 7, 189–201. [Google Scholar] [CrossRef]
- Druyanov, B. Technological Mechanics of Porous Bodies; Clarendon Press: New York, NY, USA, 1993. [Google Scholar]
- Cox, G.M.; Thamwattana, N.; McCue, S.W.; Hill, J.M. Coulomb–Mohr Granular Materials: Quasi-static flows and the highly frictional limit. ASME. Appl. Mech. Rev. 2008, 61, 060802. [Google Scholar] [CrossRef]
- Burenin, A.A.; Tkacheva, A.V. Piecewise linear plastic potentials as a tool for calculating plane transient temperature stresses. Mech. Solids 2020, 55, 791–799. [Google Scholar] [CrossRef]
- Spencer, A.J.M. A theory of the kinematics of ideal soils under plane strain conditions. J. Mech. Phys. Solids 1964, 12, 337–351. [Google Scholar] [CrossRef]
- Hill, R. The Mathematical Theory of Plasticity; Clarendon Press: Oxford, UK, 1950. [Google Scholar]
- Bastawros, A.; Kyung-Suk, K. Experimental analysis of near-crack-tip plastic flow and deformation characteristics (I): Polycrystalline aluminum. J. Mech. Phys. Solids 2000, 48, 67–98. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandrov, S.; Rynkovskaya, M.; Tsai, S.-N. Application of the Generalized Method of Moving Coordinates to Calculating Stress Fields near an Elliptical Hole. Materials 2022, 15, 6266. https://doi.org/10.3390/ma15186266
Alexandrov S, Rynkovskaya M, Tsai S-N. Application of the Generalized Method of Moving Coordinates to Calculating Stress Fields near an Elliptical Hole. Materials. 2022; 15(18):6266. https://doi.org/10.3390/ma15186266
Chicago/Turabian StyleAlexandrov, Sergei, Marina Rynkovskaya, and Shang-Nan Tsai. 2022. "Application of the Generalized Method of Moving Coordinates to Calculating Stress Fields near an Elliptical Hole" Materials 15, no. 18: 6266. https://doi.org/10.3390/ma15186266