
On Smart Geometric Non-Destructive Evaluation: Inspection Methods, Overview, and Challenges


 , , , , and
, , , , and 
Abstract
:1. Introduction
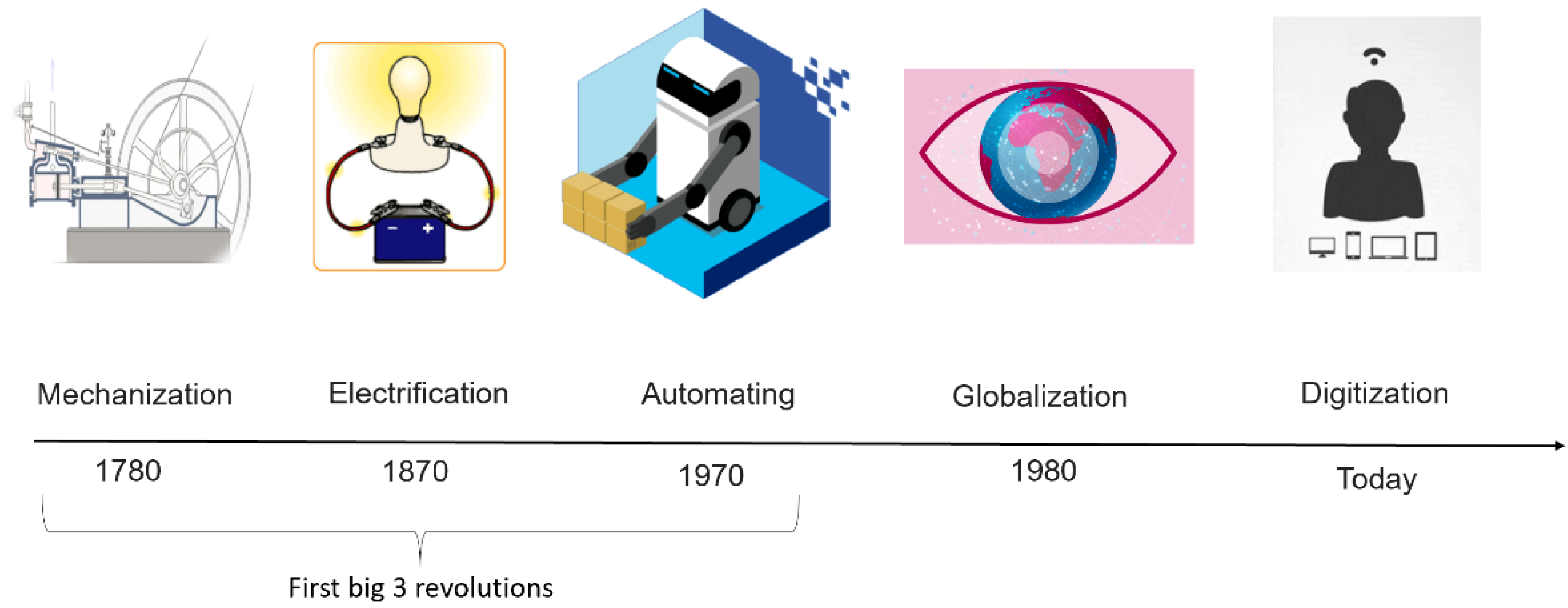
Industry 4.0 and Quality Control
- To the best of our knowledge, this is the first article to list the traditional inspection methods, discusses their advantages and disadvantages and compare them to the new smart techniques to act as a gathering point of all intertwined areas: artificial intelligence, Industry 4.0, inspection and maintenance;
- Listing the challenges hampering the domain and the relevant future recommendation in a manner that helps researchers to know where we stand today and where to start their new work;
- Proposing a new model that is based on digital twins for smart inspection of lattice towers.
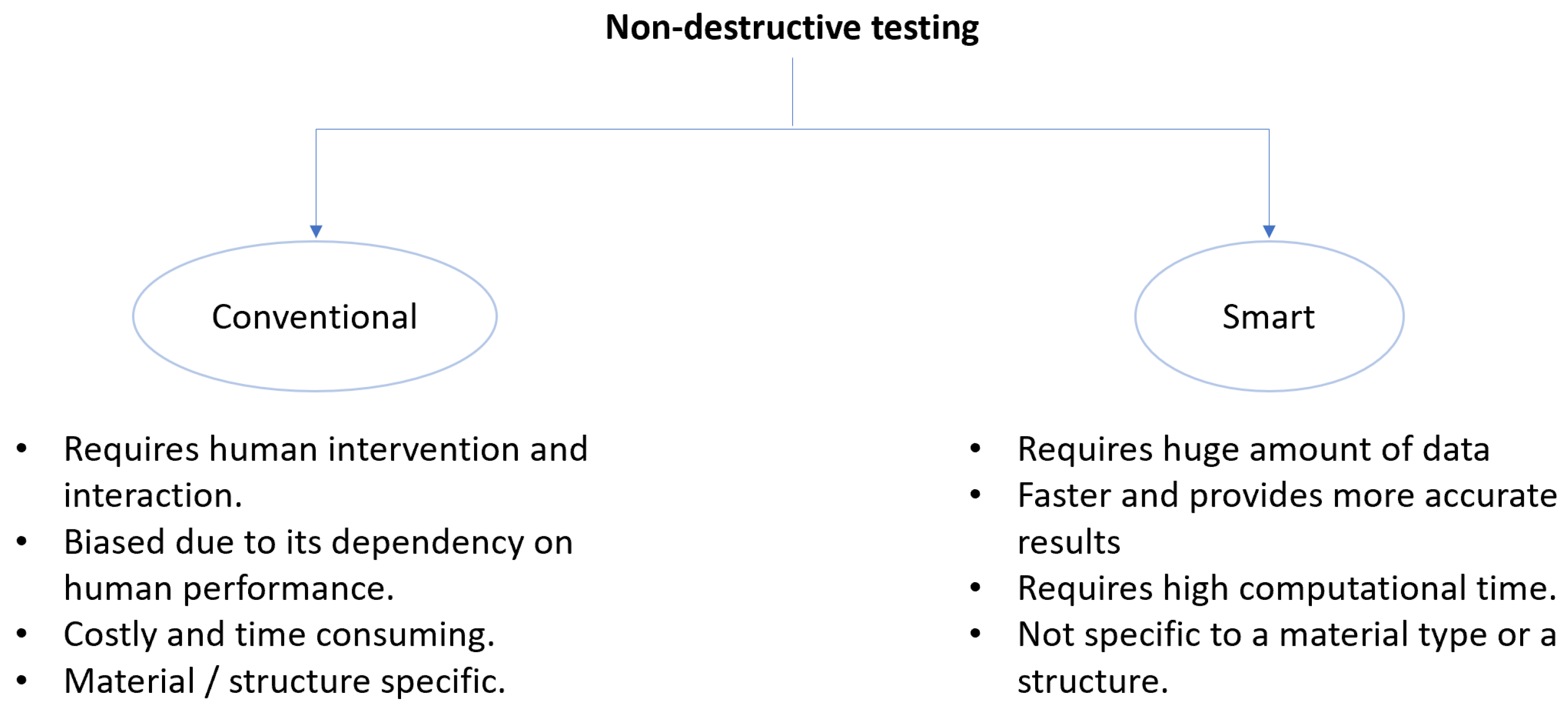
2. Classification of NDE Methods
2.1. Visual Evaluation (VE)
2.2. Eddy Current Evaluation
2.3. Ultrasonic Evaluation
2.4. Thermal Inspection
2.5. Laser Spot Thermography
3. Smart Inspection
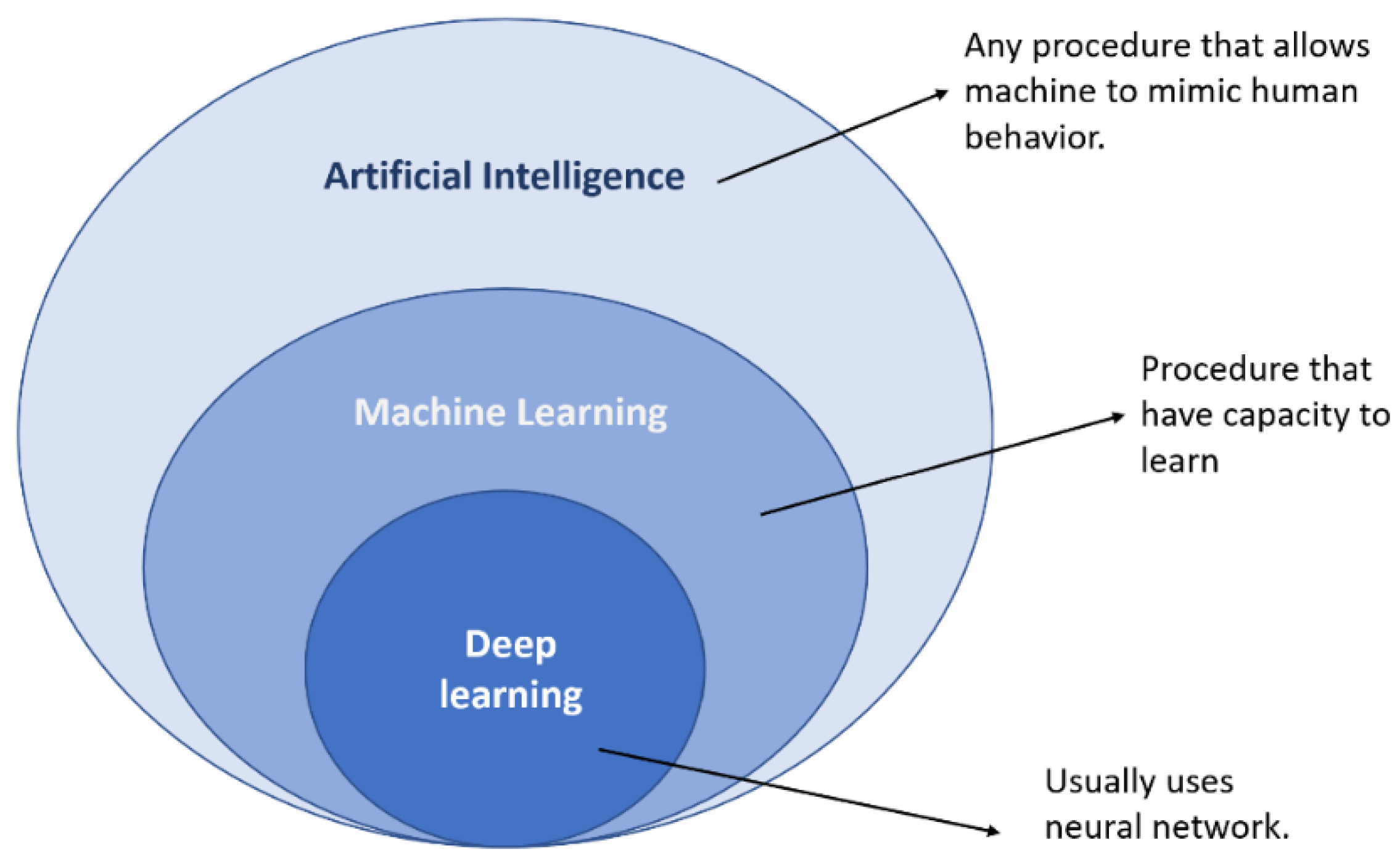
3.1. Artificial Intelligence (AI)
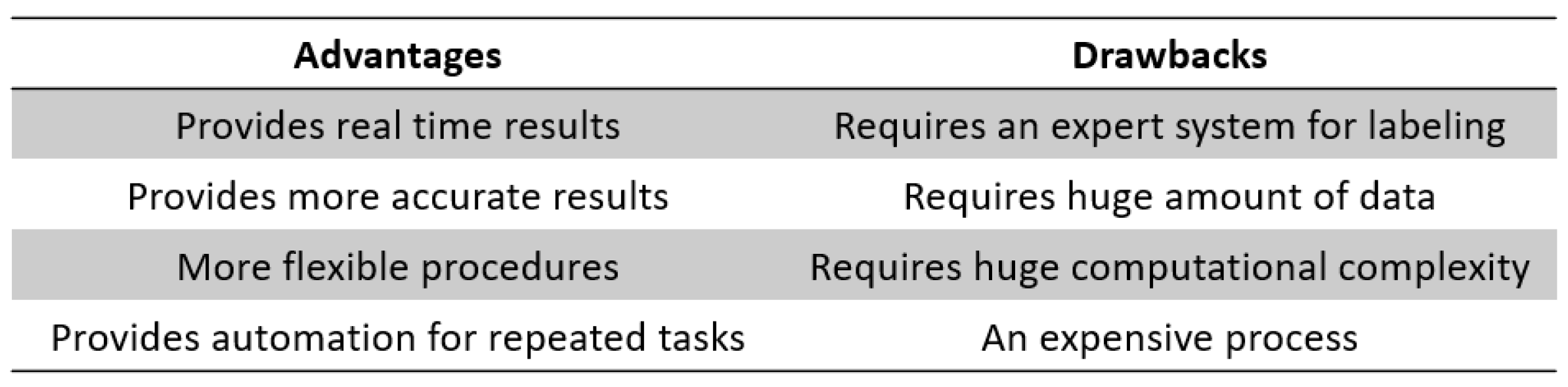
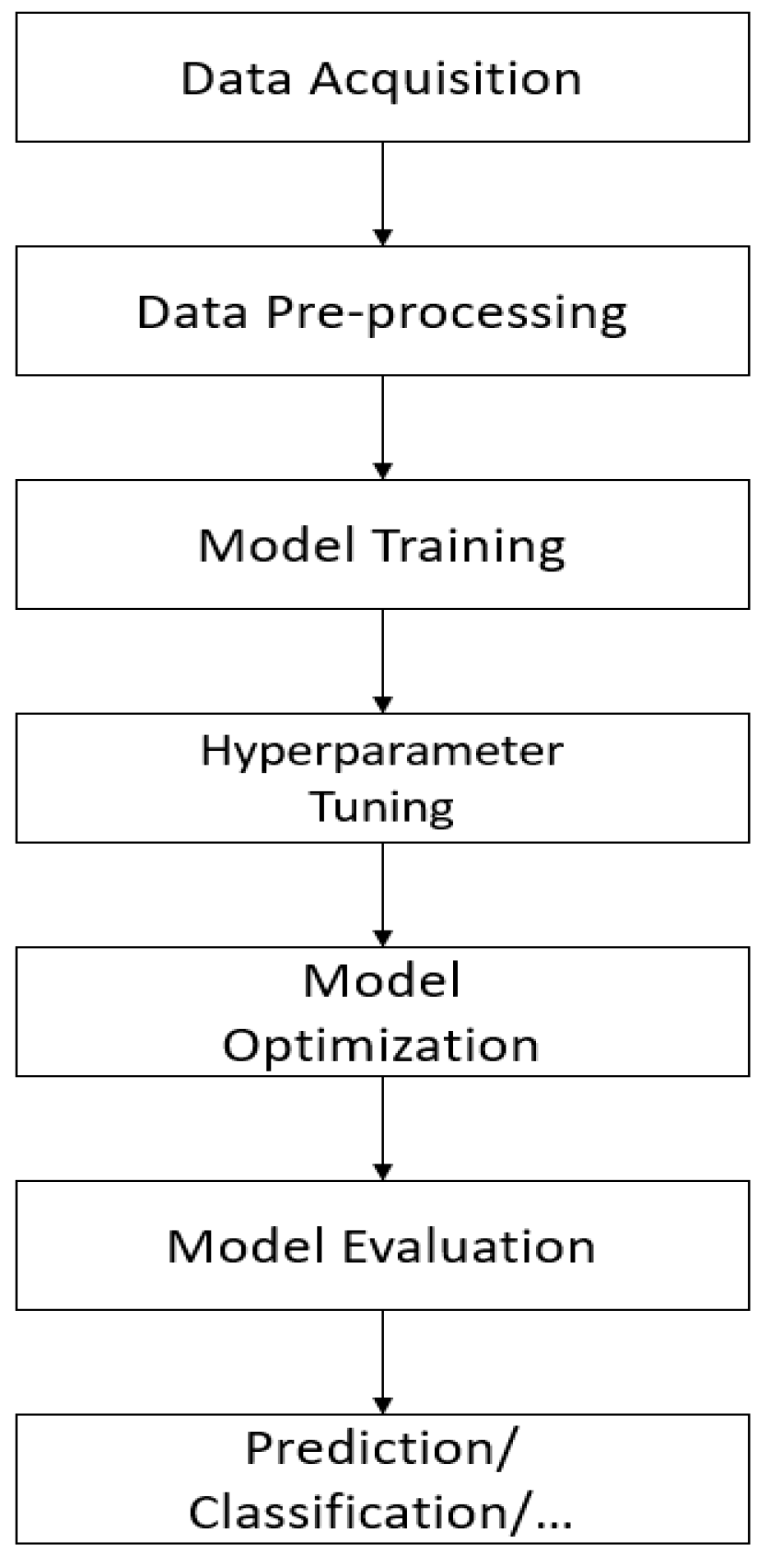
3.2. Machine Learning (ML)
3.2.1. Supervised Learning
- Support Vector Machine (SVM): SVMs are supervised learning models with learning algorithms for data classification and regression analysis. SVM has the ability to manage multivariate datasets with high dimensions [7];
- Back Propagation Neural Network (BPNN): Back Propagation Neural Network (BPNN) is a supervised learning approach that uses iterative optimization to deal with classification or regression problems. It usually accepts a vector as input and returns a label containing information about the corresponding classes or function value.
3.2.2. Unsupervised Learning
- Artificial Neural Network (ANN): ANN consists of a network of interconnected units or nodes known as artificial neurons. An artificial neural network is in fact constructed from simulated neurons. Each neuron is a node that is connected to other nodes by connections. Each link has a weight that indicates the intensity of influence of one node on another node;
- Convolutional Neural Network (CNN): CNN is a class of ANN that is mostly used for analyzing visual images. A CNN consists of three layers: an input layer, hidden layers, and an output layer;
- Region Based Convolutional Neural Networks (RCNN): R-CNN or RCNN is a type of machine learning model used for computer vision tasks, especially object recognition. These networks are slow in identifying areas and scanning. RCNN runs CNNs on each region and the output is fed to and SVM for region classification;
- Fast- RCNN: Fast R-CNN uses a less complex architecture than RCNN. It is faster in identifying regions and has improved performance. Fast R-CNN uses a CNN for the whole image because it extracts features before selecting regions;
- K-Nearest Neighbor algorithms: The K-Nearest Neighbor (KNN) approach assumes that comparable data points in a dataset will be spatially adjacent to each other or neighbors. Although KNN is classified as a supervised learning method, it can solve both regression and classification problems. The KNN algorithm considers point proximity as a metric of class similarity;
- K-Means Algorithm: The K-means method divides the data into k clusters, each of which is characterized by a centroid. A cluster is a collection of data points that are grouped in space due to having similar characteristics. The centroid is also where the center of the cluster is located;
- Autoencoders: An artificial neural network known as an autoencoder is used to learn to efficiently encode unlabeled inputs (unsupervised learning). The encoding is checked and improved by trying to recreate the input from the encoding;
- Decision Tree DT: A form of supervised machine learning (in which you describe what the input is and what the associated outputs are in the training data) where the data is continuously separated based on a certain parameter. Two entities may be used to describe the tree: decision nodes and leaves. Decisions or consequences are represented by leaves, and the data is separated into decision nodes;
- Yolo Algorithm: “YOLO” is the abbreviation for “You Only Look Once”. This is an algorithm that finds and identifies different objects in a picture (in real-time). To detect objects in real time, the YOLO algorithm employs convolutional neural networks (CNN), requiring just one forward propagation through a neural network, as the name implies. This indicates that the complete image is predicted in a single algorithm run. The CNN is used to predict several class probabilities and bounding boxes at the same time. As an example of the use of the YOLO algorithm, a model based on the YOLOv4-tiny-algorithm was developed in [44] to detect and position the Camellia oleifera fruit. Despite variations in light, the algorithm demonstrated great positioning stability and resilient operation. The YOLO-Oleifera model detected each fruit picture in an average of 31 milliseconds, which is fast enough to fulfil the requirement for real-time detection.
3.2.3. Machine Learning Tools
- TENSORFLOW: Free and open source software library for machine learning and artificial intelligence [45];
- Keras: A neural network application programming interface (API) for Python that is integrated with TensorFlow and used to generate machine learning models. Keras models provide a straightforward and user-friendly approach to building a neural network that TensorFlow can subsequently build. Keras runs on top of TensorFlow [45].
- PyTorch: An open-source machine learning framework based on the Torch library used for applications such as computer vision and natural language processing, primarily developed by Facebook’s AI research lab. This is open-source software distributed under the Modified BSD license [45].
3.3. Automated Inspection
- UT techniques (single element and transmit-receive, phased array, immersion)
- Electromagnetic techniques
- VT techniques
4. Industry 4.0
4.1. Big Data
4.2. Cyber-Physical System
4.3. Smart Factory
4.4. Internet of Things
4.5. Augmented Reality
- Real-time reflection/real-time data: There is a huge amount of real-time data transfer during the manufacturing process. The transfer, analysis, and use of this data will be very important;
- 3D space registration: Rreal manufacturing environments are very complex. The perfection of detection, tracking, and following of target objects determines the quality of the AR;
- Reliability: In some extreme manufacturing environments, such as high temperature, low pressure and humidity conditions, the AR must be reliable and robust enough to perform the tasks;
- Collaboration: The use of AR in smart manufacturing must consider multiple users and operators simultaneously monitoring and controlling the target. Collaboration functionality is critical to AR applications.
4.6. Digital Twins
4.7. Industry 4.0 for Monitoring and Inspection
4.8. Challenges and Future Recommendations
- Data Concerns (availability—readiness—locality of data)
- ▪
- Availability: Training a model necessitates having the relevant data, which may not be available at the time, or may be available but inaccessible for a variety of reasons;
- ▪
- Readiness: Even if data is available and accessible, several issues should be taken into consideration such as data heterogeneity (the accessible data may have various attributes or be formed of various types), noise (Data may be contaminated by noisy qualities as a result of interactions between data collecting instruments and other electrical devices, affecting the overall outcomes of the ML models), and missing data;
- ▪
- Data locality: In the actual world, data is dispersed into disparate and unrelated entities known as “Data Islands.” Data relating to the same issue and available on separate data islands cannot be accessed to be used and analyzed due to different policies and legislation.
- ML Model Concerns
- ▪
- Accuracy and performance: Obtaining the maximum accuracy for ML models remains the primary aim for academics from many areas, with the best accuracy leading to the most adoption and integration of this technology;
- ▪
- Explainability: Some ML models, particularly Deep Learning models, are identified by their black-box identification. Even when great accuracies are established, the lack of a how-it-worked explanation may reduce trust in those models;
- ▪
- Model Selection: Even when working with the same problems, various models may provide different solutions. Support Vector Machines (SVM) and Logistic Regression (LR); for example, might provide different outcomes while working with the same data at the same time. As a result, finding the best model and fine-tuning its parameters is a difficult undertaking;
- ▪
- Execution time and complexity: Because of the complexity of the data or models, the numerous preparation stages, and a variety of other factors, ML models may need massive computational resources and a lengthy execution time.
- Privacy:
- ▪
- Privacy is one of the most pressing topics in the field of machine learning. Users may refuse to provide their data for a variety of reasons, affecting data availability and jeopardizing the entire ML cycle.
- Model related recommendation: Smart inspection is becoming increasingly vital. Therefore, there is a need to enhance the accuracy of defect detection by the means of Industry 4.0, as well as the explainability of these tools, and to minimize as much as possible the black box features of the models incorporated in these smart techniques. Increased accuracy and explainability will help these devices gain confidence and, as a result, be deployed.
- Privacy recommendation: Later machine learning algorithms provide further privacy options. Federated learning (FL), for example, is a promising technology that can aid in the resolution of privacy issues. Federated learning is a sort of collaborative distributed/decentralized machine learning privacy-preserving solution that trains a model without transferring data from edge devices to a central server. Instead, the trained models are distributed across the edge devices and the central server, which serves as an aggregation station to generate the global model without knowing the embedded data [73,74,75,76,77]. The use of FL in defect detection and monitoring is predicted to assist overcome the privacy issue, allowing for greater data gathering and therefore improving accuracy.
5. Towards Smart Inspection for Industry 4.0
5.1. Smart Inspection by Digital Twins
- Machine learning and data-driven modeling
- A numerical modeling analysis
- Data-driven condition monitoring
- A real-time anomaly detection algorithm
5.2. Virtual Inspection
- Verify the accuracy of the digital twin;
- Diagnose if there is an inconsistency from the desired state;
- Figure out where the inconsistency originates;
- Adapt the digital twin by making appropriate changes.
- The final aim of the virtual inspection is to diagnose the assets’ health status with maximum reliability and to ensure requirements for accurate inspection of assets.
5.3. Image Classification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Market Leadership—Testing, Inspection and Certification Market. Available online: https://www.marketsandmarkets.com/ResearchInsight/testing-inspection-certification-market.asp (accessed on 15 August 2022).
- Dwivedi, S.K.; Vishwakarma, M.; Soni, A. Advances and Researches on Non Destructive Testing: A Review. Mater. Today Proc. 2018, 5, 3690–3698. [Google Scholar] [CrossRef]
- Kumar, S.; Mahto, D. Recent Trends in Industrial and other Engineering Applications of Non Destructive Testing: A Review. Int. J. Sci. Eng. Res. 2013, 4. Available online: https://engineeringresearch.org/index.php/GJRE/article/view/952 (accessed on 15 August 2022).
- Alotaibi, M.; Asli, B.H.S.; Khan, M. Non-Invasive Inspections: A Review on Methods and Tools. Sensors 2021, 21, 8474. [Google Scholar] [CrossRef] [PubMed]
- Ghobakhloo, M. Industry 4.0, digitization, and opportunities for sustainability. J. Clean. Prod. 2020, 252, 119869. [Google Scholar] [CrossRef]
- Lasi, H.; Fettke, P.; Kemper, H.-G.; Feld, T.; Hoffmann, M. Industrie 4.0. WIRTSCHAFTSINFORMATIK 2014, 56, 261–264. [Google Scholar] [CrossRef]
- Kotsiopoulos, T.; Sarigiannidis, P.; Ioannidis, D.; Tzovaras, D. Machine Learning and Deep Learning in smart manufacturing: The Smart Grid paradigm. Comput. Sci. Rev. 2021, 40, 100341. [Google Scholar] [CrossRef]
- Velíšek, K.; Holubek, R.; Sobrino, D.R.D.; Ružarovský, R.; Vetríková, N. Design of a robotized workstation making use of the integration of CAD models and Robotic Simulation software as way of pairing and comparing real and virtual environments. MATEC Web Conf. 2017, 94, 05008. [Google Scholar] [CrossRef] [Green Version]
- Hao, R.; Lu, B.; Cheng, Y.; Li, X.; Huang, B. A steel surface defect inspection approach towards smart industrial monitoring. J. Intell. Manuf. 2021, 32, 1833–1843. [Google Scholar] [CrossRef]
- Zonta, T.; da Costa, C.A.; da Rosa Righi, R.; de Lima, M.J.; da Trindade, E.S.; Li, G.P. Predictive maintenance in the Industry 4.0: A systematic literature review. Comput. Ind. Eng. 2020, 150, 106889. [Google Scholar] [CrossRef]
- Foidl, H.; Felderer, M. Research Challenges of Industry 4.0 for Quality Management. In Innovations in Enterprise Information Systems Management and Engineering; Felderer, M., Piazolo, F., Ortner, W., Brehm, L., Hof, H.-J., Eds.; Springer: Cham, Switzerland, 2016; Volume 245, pp. 121–137. [Google Scholar] [CrossRef]
- Villalba-Diez, J.; Schmidt, D.; Gevers, R.; Ordieres-Meré, J.; Buchwitz, M.; Wellbrock, W. Deep Learning for Industrial Computer Vision Quality Control in the Printing Industry 4.0. Sensors 2019, 19, 3987. [Google Scholar] [CrossRef]
- Hrehova, S.; Husár, J.; Knapčíková, L. Production quality control using the industry 4.0 concept. In International Conference on Future Access Enablers of Ubiquitous and Intelligent Infrastructures; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Lee, S.M.; Lee, D.H.; Kim, Y.S. The quality management ecosystem for predictive maintenance in the Industry 4.0 era. Int. J. Qual. Innov. 2019, 5, 4. [Google Scholar] [CrossRef]
- Li, L.; Ota, K.; Dong, M. Deep Learning for Smart Industry: Efficient Manufacture Inspection System with Fog Computing. IEEE Trans. Ind. Inform. 2018, 14, 4665–4673. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.-K.; Tian, G.-Y.; Lu, R.-S.; Zhang, H. A Review of Optical NDT Technologies. Sensors 2011, 11, 7773–7798. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Zhu, M.; Chen, Z.; Wu, C.; Chen, B.; Li, C.; Li, L. Seismic performance evaluation of recycled aggregate concrete-filled steel tubular columns with field strain detected via a novel mark-free vision method. Structures 2022, 37, 426–441. [Google Scholar] [CrossRef]
- Collao, J.; Lozano-Galant, F.; Lozano-Galant, J.A.; Turmo, J. BIM Visual Programming Tools Applications in Infrastructure Projects: A State-of-the-Art Review. Appl. Sci. 2021, 11, 8343. [Google Scholar] [CrossRef]
- Zergoug, M.; Lebaili, S.; Boudjellal, H.; Benchaala, A. Relation between mechanical microhardness and impedance variations in eddy current testing. NDT E Int. 2004, 37, 65–72. [Google Scholar] [CrossRef]
- Cevenini, M. Safety and Productivity Innovations in Liquid Penetrants and Magnetic Particles Testing. In Proceedings of the 19th World Conference on Non-Destructive Testing (WCNDT 2016), Munich, Germany, 13–17 June 2016. [Google Scholar]
- García-Martín, J.; Gómez-Gil, J.; Vázquez-Sánchez, E. Non-Destructive Techniques Based on Eddy Current Testing. Sensors 2011, 11, 2525–2565. [Google Scholar] [CrossRef] [Green Version]
- Morozov, M.; Rubinacci, G.; Tamburrino, A.; Ventre, S. Numerical models of volumetric insulating cracks in eddy-current testing with experimental validation. IEEE Trans. Magn. 2006, 42, 1568–1576. [Google Scholar] [CrossRef]
- Thollon, F.; Lebrun, B.; Burais, N.; Jayet, Y. Numerical and experimental study of eddy current probes in NDT of structures with deep flaws. NDT E Int. 1995, 28, 97–102. [Google Scholar] [CrossRef]
- Chen, Z.; Miya, K. A New Approach for Optimal Design of Eddy Current Testing Probes. J. Nondestruct. Eval. 1998, 17, 105–116. [Google Scholar] [CrossRef]
- La, R.; Benoist, B.; de Barmon, B.; Talvard, M.; Lengellé, R.; Gaillard, P. MESSINE, a Parametric Three-Dimensional Eddy Current Model. Res. Nondestruct. Eval. 2000, 12, 65–86. [Google Scholar] [CrossRef]
- Stander, J.; Plunkett, J.; Michalson, W.; McNeill, J.; Ludwig, R. A novel multi-probe resistivity approach to inspect green-state metal powder compacts. J. Nondestruct. Eval. 1997, 16, 205–214. [Google Scholar] [CrossRef]
- Institut Dr. Foerster Home Page. Available online: http://www.foerstergroup.com (accessed on 17 January 2011).
- Pohl, R.; Erhard, A.; Montag, H.J.; Thomas, H.M.; Wüstenberg, H. NDT techniques for railroad wheel and gauge corner inspection. NDT E Int. 2004, 37, 89–94. [Google Scholar] [CrossRef]
- Roshan, C.C.; Raghul, C.; Ram, H.V.; Suraj, K.P.; Solomon, J. Non-destructive testing by liquid penetrant testing and ultrasonic testing—A review. Int. J. Adv. Res. Ideas Innov. Technol. 2019, 5, 694–697. [Google Scholar]
- Hishamuddin, M.A.H.; Mohd Zin, S.M.; Yusup, E.M. Non-Destructive Measurement and Evaluation of Surface Cracks Using Ultrasonic Rayleigh Waves—A Review. J. Phys. Conf. Ser. 2021, 2129, 012038. [Google Scholar] [CrossRef]
- Chapman, R.K. A system model for the ultrasonic inspection of smooth planar cracks. J. Nondestruct. Eval. 1990, 9, 197–210. [Google Scholar] [CrossRef]
- Baillie, I.; Griffith, P.; Jian, X.; Dixon, S. Implementing an ultrasonic inspection system to find surface and internal defects in hot, moving steel using EMATs. Insight-Non-Destr. Test. Cond. Monit. 2007, 49, 87–92. [Google Scholar] [CrossRef]
- Rogler, R.D.; Lobl, H.; Schmidt, J. A diagnostic system for live electrical joints in power transmission systems. In Proceedings of the Forty-Second IEEE Holm Conference on Electrical Contacts. Joint with the 18th International Conference on Electrical Contacts, Chicago, IL, USA, 16–20 September 1996. [Google Scholar]
- Jadin, M.S.; Ghazali, K.H.; Taib, S. Thermal condition monitoring of electrical installations based on infrared image analysis. In Proceedings of the 2013 Saudi International Electronics, Communications and Photonics Conference, Riyadh, Saudi Arabia, 27–30 April 2013. [Google Scholar]
- Meyer, L.H.; Jayaram, S.H.; Cherney, E.A. A novel technique to evaluate the erosion resistance of silicone rubber composites for high voltage outdoor insulation using infrared laser erosion. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 1201–1208. [Google Scholar] [CrossRef]
- Balageas, D.; Maldague, X.; Burleigh, D.; Vavilov, V.P.; Oswald-Tranta, B.; Roche, J.M.; Pradere, C.; Carlomagno, G.M. Thermal (IR) and Other NDT Techniques for Improved Material Inspection. J. Nondestruct. Eval. 2016, 35, 18. [Google Scholar] [CrossRef]
- Qiu, J.; Pei, C.; Liu, H.; Chen, Z.; Demachi, K. Remote inspection of surface cracks in metallic structures with fiber-guided laser array spots thermography. NDT E Int. 2017, 92, 213–220. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, Y.; Lv, Y.; Shi, A.; Liang, R. A vision inspection system for the surface defects of strongly reflected metal based on multi-class SVM. Expert Syst. Appl. 2011, 38, 5930–5939. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, M.; Zheng, P.; Yang, H.; Zou, J. A smart surface inspection system using faster R-CNN in cloud-edge computing environment. Adv. Eng. Inform. 2020, 43, 101037. [Google Scholar] [CrossRef]
- McCarthy, J. What is Artificial Intelligence? Stanford University: Stanford, CA, USA, 2007. [Google Scholar]
- Turing, A.M.I. Computing Machinery and Intelligence. Mind 1950, LIX, 433–460. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 4th ed.; Pearson: Hoboken, NJ, USA, 2021. [Google Scholar]
- Taheri, H.; Bocanegra, M.G.; Taheri, M. Artificial Intelligence, Machine Learning and Smart Technologies for Nondestructive Evaluation. Sensors 2022, 22, 4055. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; Zhou, H.; Wang, H.; Zhang, Y. Fruit detection and positioning technology for a Camellia oleifera C. Abel orchard based on improved YOLOv4-tiny model and binocular stereo vision. Expert Syst. Appl. 2023, 211, 118573. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Y.; Zhang, L.; Gao, R.X.; Wu, D. Deep learning for smart manufacturing: Methods and applications. J. Manuf. Syst. 2018, 48, 144–156. [Google Scholar] [CrossRef]
- Glass, S.W.; Gripp, S.; Haase, W.; Vanremortel, J. Robots for Automated Nondestructive Examination of Complex Shapes. In Proceedings of the ASNT 22nd Research Symposium 2013, Memphis, TN, USA, 18–21 March 2013; pp. 151–156. [Google Scholar]
- Dobmann, G.; Kurz, J.H.; Taffe, A.; Streicher, D. Development of automated non-destructive evaluation (NDE) systems for reinforced concrete structures and other applications. In Non-Destructive Evaluation of Reinforced Concrete Structures; Woodhead Publishing: Sawston, UK, 2010; pp. 30–62. [Google Scholar]
- Gholami, H.; Abu, F.; Lee, J.K.; Karganroudi, S.S.; Sharif, S. Sustainable Manufacturing 4.0—Pathways and Practices. Sustainability 2021, 13, 13956. [Google Scholar] [CrossRef]
- Sagiroglu, S.; Sinanc, D. Big data: A review. In Proceedings of the 2013 International Conference on Collaboration Technologies and Systems (CTS), San Diego, CA, USA, 20–24 May 2013; pp. 42–47. [Google Scholar] [CrossRef]
- Bakshi, K. Considerations for big data: Architecture and approach. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Godina, R.; Matias, J.C.O. Quality Control in the Context of Industry 4.0. In Industrial Engineering and Operations Management II; Reis, J., Pinelas, S., Melão, N., Eds.; Springer: Cham, Switzerland, 2019; Volume 281, pp. 177–187. [Google Scholar] [CrossRef]
- Zheng, P.; Sang, Z.; Zhong, R.Y.; Liu, Y.; Liu, C.; Mubarok, K.; Yu, S.; Xu, X. Smart manufacturing systems for Industry 4.0: Conceptual framework, scenarios, and future perspectives. Front. Mech. Eng. 2018, 13, 137–150. [Google Scholar] [CrossRef]
- Zhu, Z.; Liu, C.; Xu, X. Visualisation of the digital twin data in manufacturing by using augmented reality. Procedia Cirp 2019, 81, 898–903. [Google Scholar] [CrossRef]
- Liu, Z.; Meyendorf, N.; Mrad, N. The role of data fusion in predictive maintenance using digital twin. AIP Conf. Proc. 2018, 1949, 020023. [Google Scholar] [CrossRef]
- Risheh, A.; Tavakolian, P.; Melinkov, A.; Mandelis, A. Infrared computer vision in non-destructive imaging: Sharp delineation of subsurface defect boundaries in enhanced truncated correlation photothermal coherence tomography images using K-means clustering. NDT E Int. 2022, 125, 102568. [Google Scholar] [CrossRef]
- Shao, J.; Shi, H.; Du, D.; Wang, L.; Cao, H. Automatic weld defect detection in real-time X-ray images based on support vector machine. In Proceedings of the 2011 4th International Congress on Image and Signal Processing, Shanghai, China, 15–17 October 2011; pp. 1842–1846. [Google Scholar] [CrossRef]
- Hekmatiathar, S.; Taheri, M.; Secrist, J.; Taheri, H. Neural network for structural health monitoring with combined direct and indirect methods. J. Appl. Remote Sens. 2020, 14, 014511. [Google Scholar] [CrossRef]
- Su, D.; Liu, Y.; Li, X.; Cao, Z. Study on optimization of inspection mechanism of concrete beam bridge. PLoS ONE 2021, 16, e0256028. [Google Scholar] [CrossRef]
- Moomen, A.; Ali, A.; Ramahi, O. Reducing Sweeping Frequencies in Microwave NDT Employing Machine Learning Feature Selection. Sensors 2016, 16, 559. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Sim, S.-H.; Spencer, B.F. Automated concrete crack evaluation using stereo vision with two different focal lengths. Autom. Constr. 2022, 135, 104136. [Google Scholar] [CrossRef]
- Yu, Y.; Rashidi, M.; Samali, B.; Mohammadi, M.; Nguyen, T.N.; Zhou, X. Crack detection of concrete structures using deep convolutional neural networks optimized by enhanced chicken swarm algorithm. Struct. Health Monit. 2022, 21, 2244–2263. [Google Scholar] [CrossRef]
- Wen, Y.; Rahman, M.F.; Xu, H.; Tseng, T.-L.B. Recent advances and trends of predictive maintenance from data-driven machine prognostics perspective. Measurement 2022, 187, 110276. [Google Scholar] [CrossRef]
- Niccolai, A.; Caputo, D.; Chieco, L.; Grimaccia, F.; Mussetta, M. Machine Learning-Based Detection Technique for NDT in Industrial Manufacturing. Mathematics 2021, 9, 1251. [Google Scholar] [CrossRef]
- L’heureux, A.; Grolinger, K.; Elyamany, H.F.; Capretz, M.A. Machine learning with big data: Challenges and approaches. IEEE Access 2017, 5, 7776–7797. [Google Scholar] [CrossRef]
- Paleyes, A.; Urma, R.G.; Lawrence, N.D. Challenges in Deploying Machine Learning: A Survey of Case Studies; ACM Computing Surveys (CSUR): New York, NY, USA, 2020. [Google Scholar]
- Zhou, L.; Pan, S.; Wang, J.; Vasilakos, A.V. Machine learning on big data: Opportunities and challenges. Neurocomputing 2017, 237, 350–361. [Google Scholar] [CrossRef] [Green Version]
- Wuest, T.; Weimer, D.; Irgens, C.; Thoben, K.D. Machine learning in manufacturing: Advantages, challenges, and applications. Prod. Manuf. Res. 2016, 4, 23–45. [Google Scholar] [CrossRef] [Green Version]
- Injadat, M.; Moubayed, A.; Nassif, A.B.; Shami, A. Machine learning towards intelligent systems: Applications, challenges, and opportunities. Artif. Intell. Rev. 2021, 54, 3299–3348. [Google Scholar] [CrossRef]
- Char, D.S.; Shah, N.H.; Magnus, D. Implementing machine learning in health care—Addressing ethical challenges. New Engl. J. Med. 2018, 378, 981. [Google Scholar] [CrossRef] [Green Version]
- Yousef, N.; Parmar, C.; Sata, A. Intelligent inspection of surface defects in metal castings using machine learning. Mater. Today Proc. 2022, 67, 517–522. [Google Scholar] [CrossRef]
- Rocks, B.; Irving, D.; McAughey, K.L.; Wells, H.G.; Thring, C.B.; Hughes, D.A. Noise Reduction in Flexible-Array-Inspection Images with Machine Learning for Aerospace Applications. In Proceedings of the 2021 IEEE International Ultrasonics Symposium (IUS), Xi’an, China, 11–16 September 2021. [Google Scholar]
- Islam, M.K.; Rastegarnia, A.; Sanei, S. Signal Artifacts and Techniques for Artifacts and Noise Removal. In Signal Processing Techniques for Computational Health Informatics; Springer: Cham, Switzerland, 2021; pp. 23–79. [Google Scholar]
- Mammen, P.M. Federated learning: Opportunities and challenges. arXiv 2021, arXiv:2101.05428. [Google Scholar]
- Zhang, K.; Song, X.; Zhang, C.; Yu, S. Challenges and future directions of secure federated learning: A survey. Front. Comput. Sci. 2022, 16, 165817. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, Y.; Chen, T.; Tong, Y. Federated machine learning: Concept and applications. ACM Trans. Intell. Syst. Technol. TIST 2019, 10, 1–19. [Google Scholar] [CrossRef]
- Li, Q.; Wen, Z.; Wu, Z.; Hu, S.; Wang, N.; Li, Y.; He, B. A survey on federated learning systems: Vision, hype and reality for data privacy and protection. In IEEE Transactions on Knowledge and Data Engineering; IEEE: Piscataway Township, NJ, USA, 2021. [Google Scholar]
- Li, L.; Fan, Y.; Tse, M.; Lin, K.Y. A review of applications in federated learning. Comput. Ind. Eng. 2020, 149, 106854. [Google Scholar]
- Aminzadeh, A.; Sattarpanah Karganroudi, S.; Meiabadi, M.S.; Mohan, D.G.; Ba, K. A Survey of Process Monitoring Using Computer-Aided Inspection in Laser-Welded Blanks of Light Metals Based on the Digital Twins Concept. Quantum Beam Sci. 2022, 6, 19. [Google Scholar] [CrossRef]
- Gao, Y.; Qian, S.; Li, Z.; Wang, P.; Wang, F.; He, Q. Digital Twin and Its Application in Transportation Infrastructure. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July 2021–15 August 2021. [Google Scholar]
- Poole, A.; Sutcliffe, M.; Pierce, G.; Gachagan, A. Autonomous, digital-twin free path planning and deployment for robotic NDT: Introducing LPAS: Locate, Plan, Approach, Scan Using Low Cost Vision Sensors. Appl. Sci. 2022, 12, 5288. [Google Scholar] [CrossRef]
- Jiang, F.; Ma, L.; Broyd, T.; Chen, K. Digital twin and its implementations in the civil engineering sector. Autom. Constr. 2021, 130, 103838. [Google Scholar] [CrossRef]
- Mill, T.; Alt, A.; Liias, R. Combined 3D building surveying techniques–terrestrial laser scanning (TLS) and total station surveying for BIM data management purposes. J. Civ. Eng. Manag. 2013, 19 (Suppl. S1), S23–S32. [Google Scholar] [CrossRef]
- Gao, T.; Ergan, S.; Akinci, B.; Garrett, J. Evaluation of different features for matching point clouds to building information models. J. Comput. Civ. Eng. 2016, 30, 04014107. [Google Scholar] [CrossRef]
- Aminzadeh, A.; Karganroudi, S.S.; Barka, N.; El Ouafi, A. A real-time 3D scanning of aluminum 5052-H32 laser welded blanks; geometrical and welding characterization. Mater. Lett. 2021, 296, 129883. [Google Scholar] [CrossRef]
- Sattarpanah Karganroudi, S.; Cuillière, J.-C.; François, V.; Tahan, S.-A. “What-if” scenarios towards virtual assembly-state mounting for non-rigid parts inspection using permissible loads. Int. J. Adv. Manuf. Technol. 2018, 97, 353–373. [Google Scholar] [CrossRef]
- Sattarpanah Karganroudi, S.; Cuillière, J.-C.; François, V.; Tahan, S.-A. Assessment of the robustness of a fixtureless inspection method for nonrigid parts based on a verification and validation approach. J. Verif. Valid. Uncertain. Quantif. 2017, 2, 041002. [Google Scholar] [CrossRef]
- Sattarpanah Karganroudi, S.; Cuillière, J.-C.; François, V.; Tahan, S.-A. Automatic fixtureless inspection of non-rigid parts based on filtering registration points. Int. J. Adv. Manuf. Technol. 2016, 87, 687–712. [Google Scholar] [CrossRef]
- Fedorko, G.; Molnar, V.; Vasiľ, M.; Salai, R. Proposal of digital twin for testing and measuring of transport belts for pipe conveyors within the concept Industry 4.0. Measurement 2021, 174, 108978. [Google Scholar] [CrossRef]
- Ziane, K.; Ilinca, A.; Karganroudi, S.S.; Dimitrova, M. Neural network optimization algorithms to predict wind turbine blade fatigue life under variable hygrothermal conditions. Eng 2021, 2, 278–295. [Google Scholar] [CrossRef]
- Feng, H.; Jiang, Z.; Xie, F.; Yang, P.; Shi, J.; Chen, L. Automatic Fastener Classification and Defect Detection in Vision-Based Railway Inspection Systems. IEEE Trans. Instrum. Meas. 2014, 63, 877–888. [Google Scholar] [CrossRef]
- Li, B.; Thomas, G.; Williams, D. Detection of Ice on Power Cables Based on Image Texture Features. IEEE Trans. Instrum. Meas. 2018, 67, 497–504. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Wang, H.; Nunez, A.; Han, Z. Automatic Defect Detection of Fasteners on the Catenary Support Device Using Deep Convolutional Neural Network. IEEE Trans. Instrum. Meas. 2018, 67, 257–269. [Google Scholar] [CrossRef] [Green Version]
- Jaffery, Z.A.; Sharma, D.; Ahmad, N. Detection of missing nuts & bolts on rail fishplate. In Proceedings of the 2017 International Conference on Multimedia, Signal Processing and Communication Technologies (IMPACT), Aligarh, India, 24–26 November 2017; pp. 36–40. [Google Scholar] [CrossRef]
- Xiao, L.; Wu, B.; Hu, Y. Missing Small Fastener Detection Using Deep Learning. IEEE Trans. Instrum. Meas. 2021, 70, 3502209. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Visual Evaluation | Eddy Current | Ultrasonic | Thermographic Inspection | Radiographic Testing | Laser 3D Scanning | Laser Spot Thermography | |
|---|---|---|---|---|---|---|---|---|
| Criteria | ||||||||
| Source | - | Eddy current | Acoustic vibration | Thermal emissivity | X-ray/Gamma-ray | Laser beam | Heat distribution | |
| Material | All | Conductive materials | All | All | All | All | Metals | |
| Contact requirements | Non-contact | Non-contact | Contact/Non-contact | Non-contact | Non-contact | Non-contact | Non-contact | |
| Advantage | Easy to implement, low cost | Low-cost, no surface treatment | Great depth penetration, high resolution | Full-field, fast, high resolution, high sensitivity | High resolution | Full-field, fast, high resolution | High surface temperature, hazardous environments, high resolution | |
| Disadvantage | Surface defects, safety problems, time-consuming, low reliability | Scanner required | Sound attenuation, time-consuming, 2D measurements | Scanner required, detection of false positives, limitation due to thermal properties of materials | Radiation hazards, relatively slow, scanner required | Surface defects | Surface defects, time-consuming | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaber, A.; Sattarpanah Karganroudi, S.; Meiabadi, M.S.; Aminzadeh, A.; Ibrahim, H.; Adda, M.; Taheri, H. On Smart Geometric Non-Destructive Evaluation: Inspection Methods, Overview, and Challenges. Materials 2022, 15, 7187. https://doi.org/10.3390/ma15207187
Jaber A, Sattarpanah Karganroudi S, Meiabadi MS, Aminzadeh A, Ibrahim H, Adda M, Taheri H. On Smart Geometric Non-Destructive Evaluation: Inspection Methods, Overview, and Challenges. Materials. 2022; 15(20):7187. https://doi.org/10.3390/ma15207187
Chicago/Turabian StyleJaber, Ali, Sasan Sattarpanah Karganroudi, Mohammad Saleh Meiabadi, Ahmad Aminzadeh, Hussein Ibrahim, Mehdi Adda, and Hossein Taheri. 2022. "On Smart Geometric Non-Destructive Evaluation: Inspection Methods, Overview, and Challenges" Materials 15, no. 20: 7187. https://doi.org/10.3390/ma15207187
APA StyleJaber, A., Sattarpanah Karganroudi, S., Meiabadi, M. S., Aminzadeh, A., Ibrahim, H., Adda, M., & Taheri, H. (2022). On Smart Geometric Non-Destructive Evaluation: Inspection Methods, Overview, and Challenges. Materials, 15(20), 7187. https://doi.org/10.3390/ma15207187