
Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure

 ,
,
Abstract
:1. Introduction
2. The Structure Design of the Soft Gripper
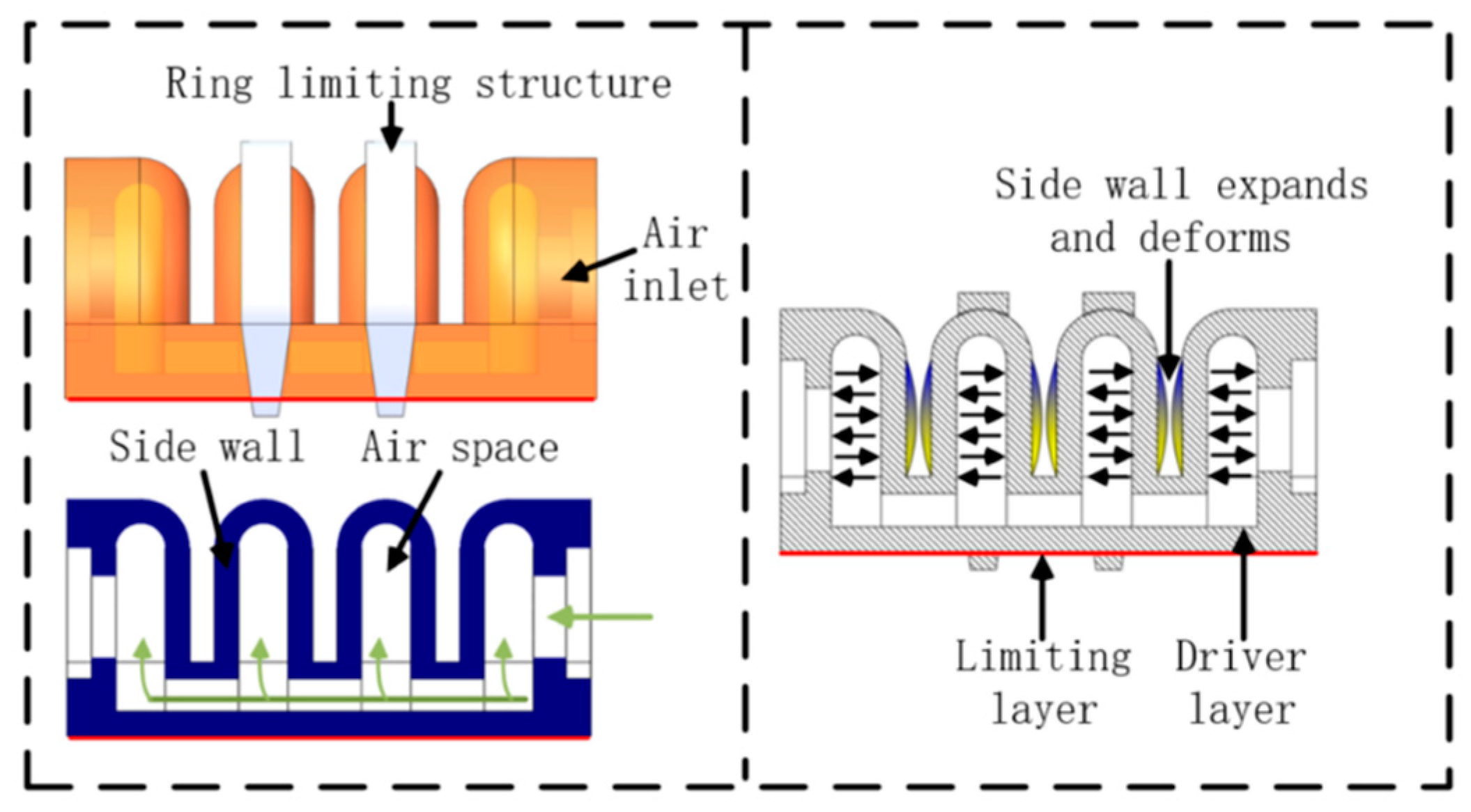
2.1. Structure Design of Soft Finger Driver
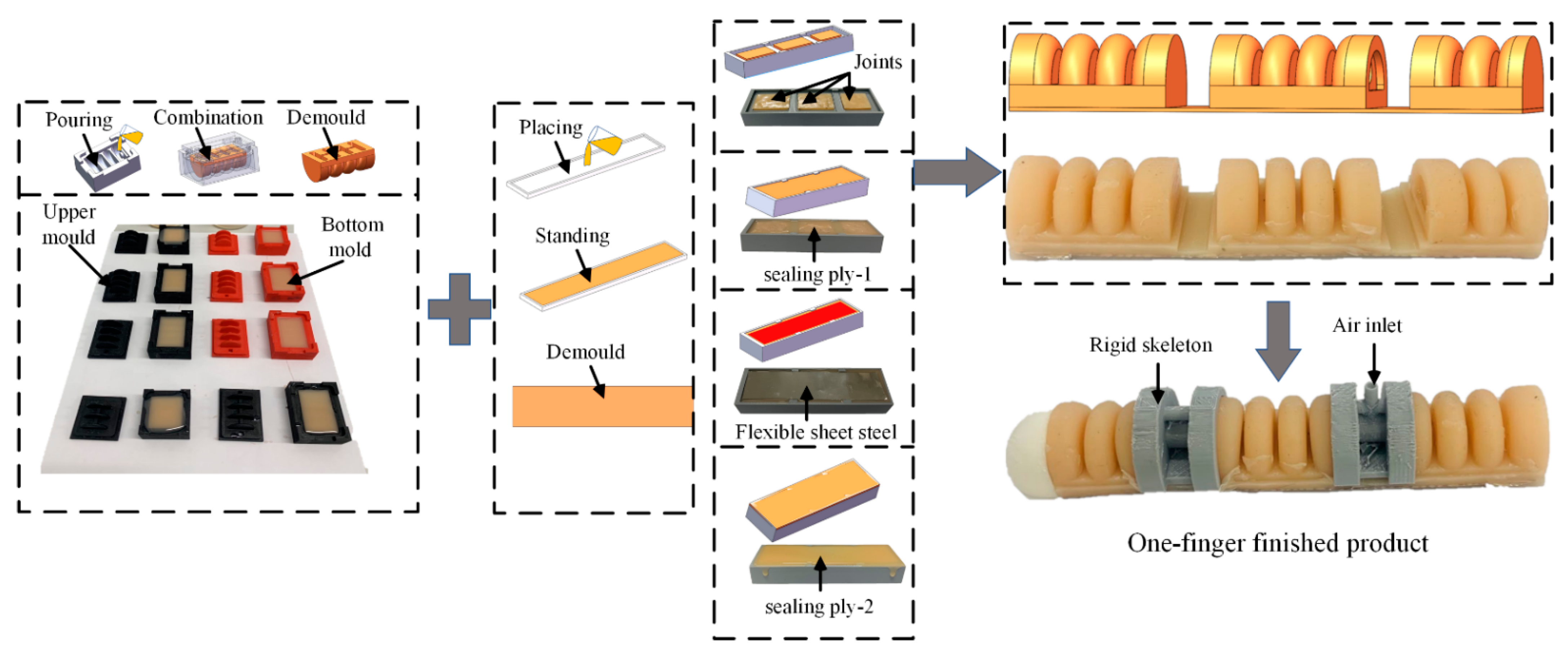
2.2. Production of Soft Gripper
3. Rigid-Flexible Coupling Bionic Hand Mechanics Modeling and Simulation Analysis
3.1. Statics Analysis of Soft Human-like Fingers
- (1)
- Silicone rubber materials are homogeneous and incompressible;
- (2)
- The restrictive layer used is not extensible;
- (3)
- The width and height of the drive remain unchanged under the action of the confinement layer.
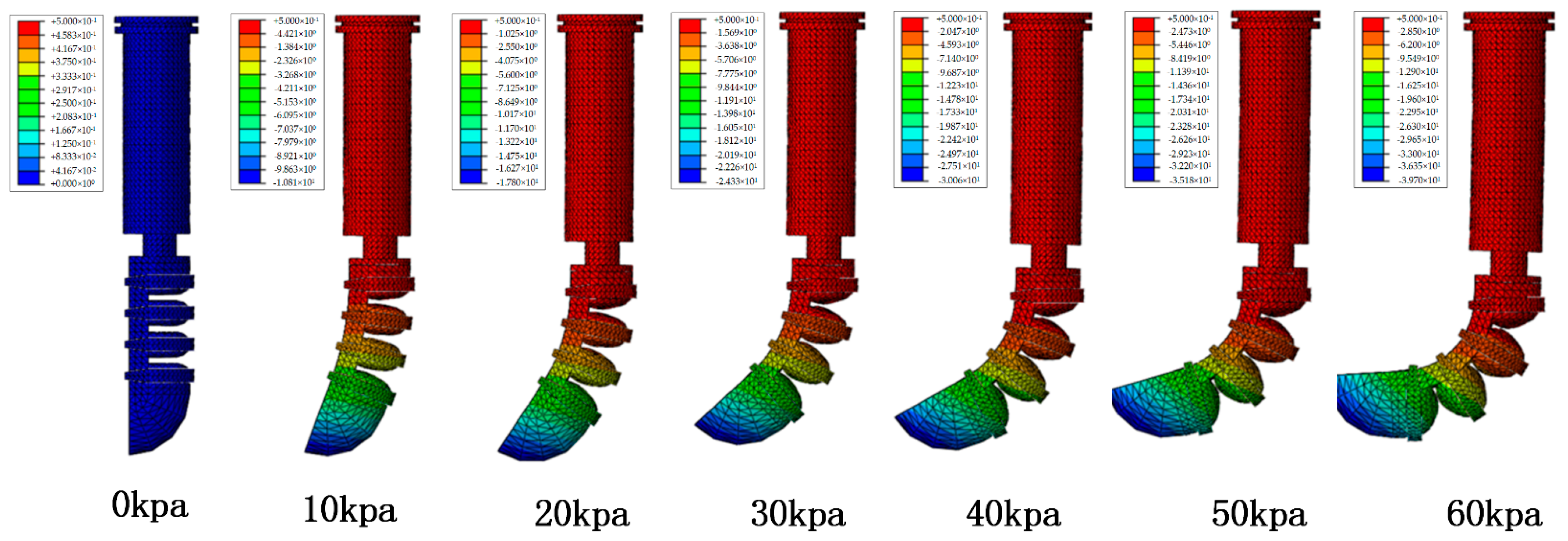
3.2. Finite Element Simulation Analysis of Soft Driver
4. Design of Bionic Gripping Hand Control System
4.1. Design of Pneumatic Control System Based on Motor Micropump
4.2. Design of Bionic Hand Soft Control System Based on LabView
5. Experimental Analysis
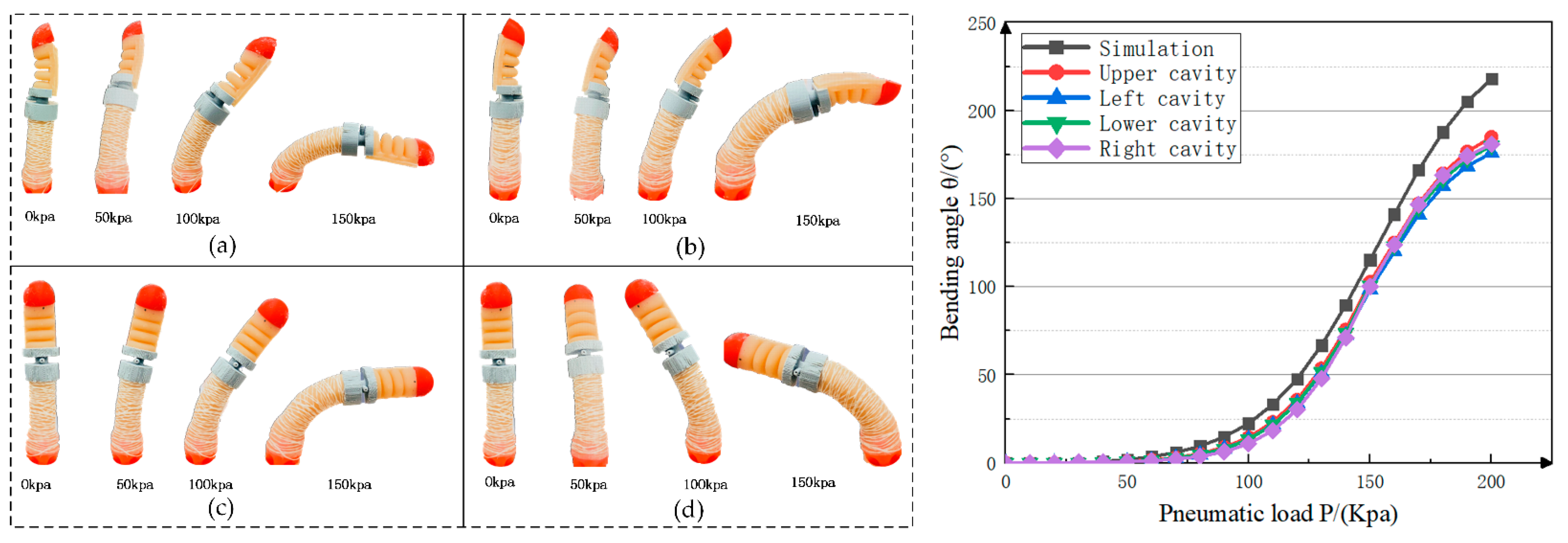
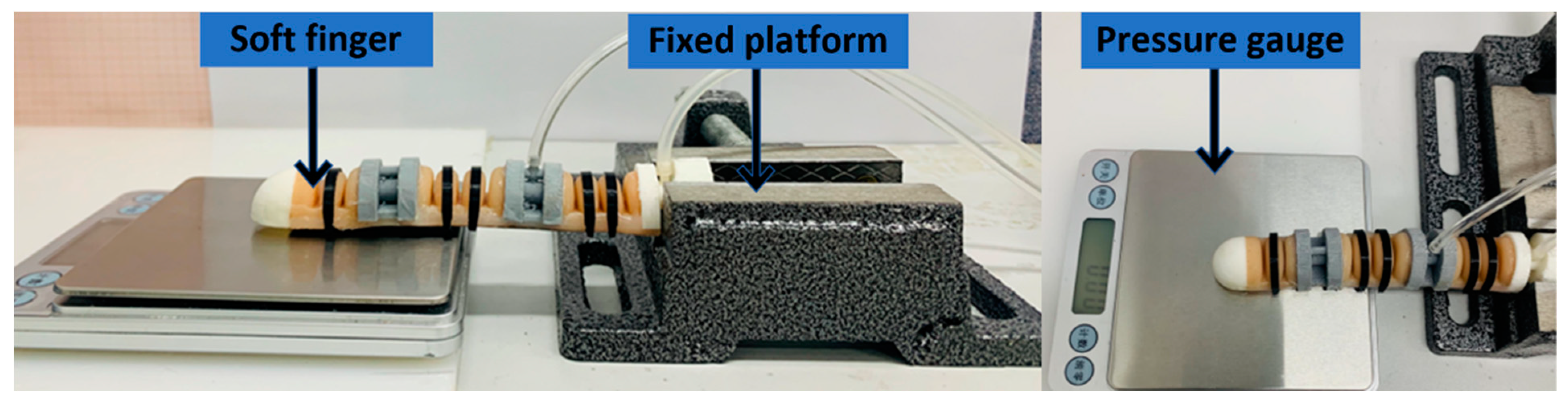
5.1. Soft Thumb Bending Performance Experiment
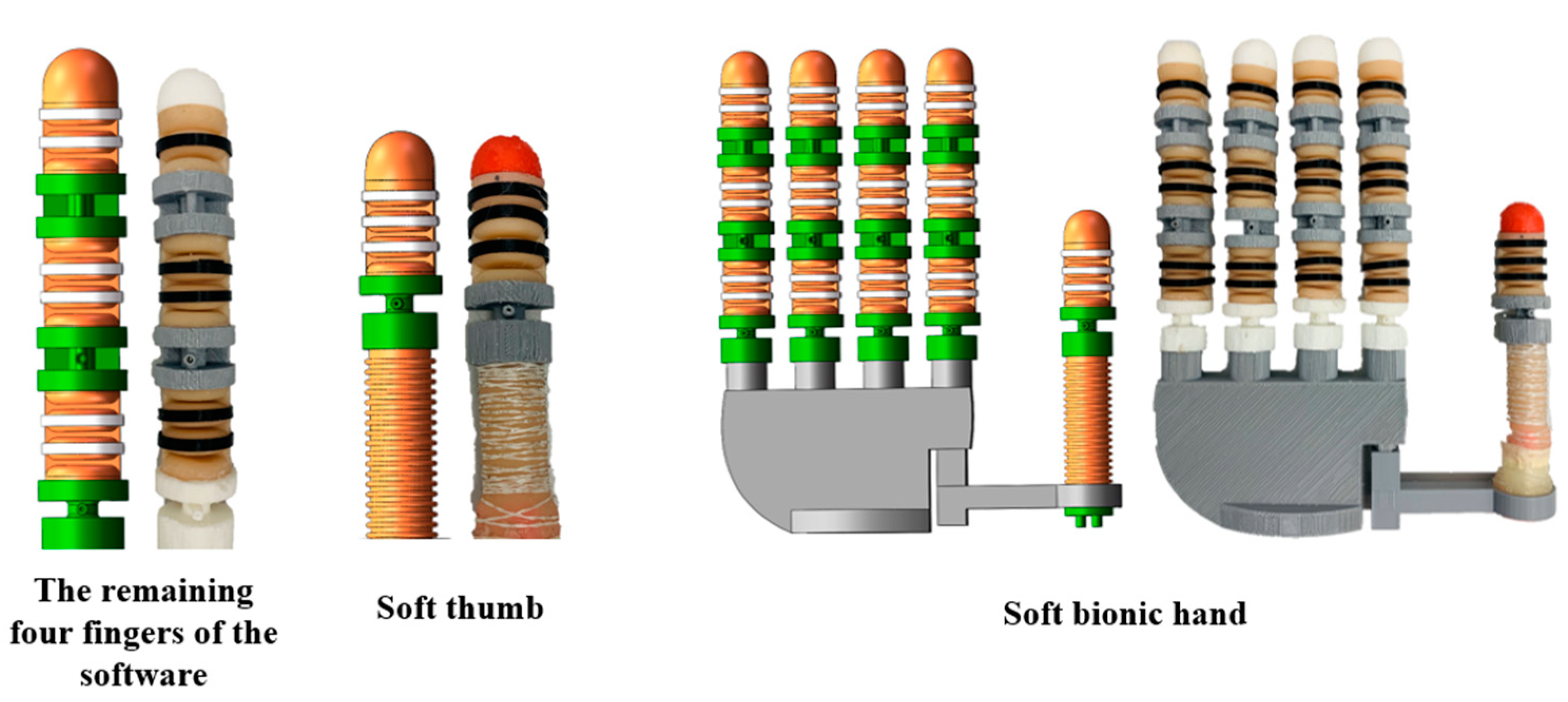
5.2. Soft Four-Finger Performance Analysis
5.3. Bionic Hand Grasping Experiment and Humanoid Gestures
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Odhner, L.U.; Jentoft, L.P.; Claffee, M.R.; Corson, N.; Tenzer, Y.; Ma, R.R.; Buehler, M.; Kohout, R.; Howe, R.D.; Dollar, A.M. A compliant, underactuated hand for robust manipulation. Int. J. Robot. Res. 2014, 33, 736–752. [Google Scholar] [CrossRef]
- Grebenstein, M.; Chalon, M.; Friedl, W.; Haddadin, S.; Wimbock, T.; Hirzinger, G.; Siegwart, R. The hand of the DLR Hand Arm System: Designed for interaction. Int. J. Robot. Res. 2012, 31, 1531–1555. [Google Scholar] [CrossRef]
- Schmitt, F.; Piccin, O.; Barbé, L.; Bayle, B. Soft Robots Manufacturing: A Review. Front. Robot. AI 2018, 5, 84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, Y.; Li, J.; Chen, Y.; Wang, Q.; Chi, C.; Zhang, H.; Gao, Q.; Lan, Y.; Li, Z.; Mu, Z. Design and Control of a Highly Redundant Rigid-Flexible Coupling Robot to Assist the COVID-19 Oropharyngeal-Swab Sampling. IEEE Robot. Autom. Lett. 2021, 7, 1856–1863. [Google Scholar] [CrossRef]
- Bubert, E.A.; Woods, B.; Lee, K.; Kothera, C.S.; Wereley, N.M. Design and Fabrication of a Passive 1D Morphing Aircraft Skin. J. Intell. Mater. Syst. Struct. 2010, 21, 1699–1717. [Google Scholar] [CrossRef]
- Rus, D.L.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Wen, L.; Wang, H. Perspective of Soft Robotics: Structure, Actuation, and Control. Jiqiren/Robot 2018, 40, 577. [Google Scholar]
- Wereley, N.; Kothera, C.; Bubert, E.; Woods, B.; Vocke, R. Pneumatic Artificial Muscles for Aerospace Applications. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Palm Springs, CA, USA, 4–7 May 2009. [Google Scholar]
- Park, Y.L.; Chen, B.R.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle-foot rehabilitation. Bioinspir. Biomim. 2014, 9, 16007. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Y.; Peng, Y.; Zhong, S.; Pu, H. A light soft manipulator with continuously controllable stiffness actuated by a thin McKibben pneumatic artificial muscle. IEEE/ASME Trans. Mechatron. 2020, 25, 1944–1952. [Google Scholar] [CrossRef]
- Zhu, M.; Do, T.N.; Hawkes, E.; Visell, Y. Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics. Soft Robot. 2020, 7, 179–197. [Google Scholar] [CrossRef] [Green Version]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Autonomous Object Manipulation Using a Soft Planar Grasping Manipulator. Soft Robot. 2015, 2, 155–164. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhong, G.; Hou, Y.; Dou, W. A soft pneumatic dexterous gripper with convertible grasping modes. Int. J. Mech. Sci. 2019, 153, 445–456. [Google Scholar] [CrossRef]
- Tang, S.; Yu, Y.; Sun, S.; Li, Z.; Li, W. Design and experimental evaluation of a new modular underactuated multi-fingered robot hand. ARCHIVE Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 2141160063. [Google Scholar] [CrossRef]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Zhang, D. A Two-Finger Soft-Robotic Gripper with Enveloping and Pinching Grasping Modes. IEEE/ASME Trans. Mechatron. 2020, 26, 146–155. [Google Scholar] [CrossRef]
- Low, J.H.; Lee, W.W.; Khin, P.M.; Thakor, N.V.; Kukreja, S.L.; Ren, H.L.; Yeow, C.H. Hybrid Tele-Manipulation System Using a Sensorized 3-D-Printed Soft Robotic Gripper and a Soft Fabric-Based Haptic Glove. IEEE Robot. Autom. Lett. 2017, 2, 880–887. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Shan, Y.; Guo, K.; Qi, L.; Yu, H. A soft continuum robot, with a large variable-stiffness range, based on jamming. Bioinspir. Biomim. 2019, 14, 66007. [Google Scholar] [CrossRef]
- Ge, L.; Chen, F.; Wang, D.; Zhang, Y.; Gu, G. Design, Modeling, and Evaluation of Fabric-Based Pneumatic Actuators for Soft Wearable Assistive Gloves. Soft Robot. 2020, 7, 583–596. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, C.; Tang, W.; Jiao, Z.; Wang, J.; Wang, W.; Zhong, Y.; Zhu, P.; Hu, Y.; Yang, H.; et al. A Bioinspired Stress-Response Strategy for High-Speed Soft Grippers. Adv. Sci. 2021, 8, 2102539. [Google Scholar] [CrossRef]
- Roth, J.; Albrecht, V.; Nitschke, M.; Bellmann, C.; Simon, F.; Zschoche, S.; Michel, S.; Luhmann, C.; Grundke, K.; Voit, B. Surface Functionalization of Silicone Rubber for Permanent Adhesion Improvement. Langmuir 2008, 24, 12603–12611. [Google Scholar] [CrossRef] [PubMed]
- Lamblet, M.; Verneuil, E.; Vilmin, T.; Buguin, A.; Silberzan, P.; Léger, L. Adhesion enhancement through micropatterning at polydimethylsiloxane-acrylic adhesive interfaces. Langmuir 2007, 23, 6966–6974. [Google Scholar] [CrossRef] [PubMed]
- Elsayed, Y.; Vincensi, A.; Lekakou, C.; Geng, T.; Saaj, C.M.; Ranzani, T.; Cianchetti, M.; Menciassi, A. Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications. Soft Robot. 2014, 1, 255–262. [Google Scholar] [CrossRef] [Green Version]
- Su, S.; Wang, S.; Li, L.; Xie, Z.; Wen, L. Vertical Fibrous Morphology and Structure-Function Relationship in Natural and Biomimetic Suction-Based Adhesion Discs. Matter 2020, 2, 1207–1221. [Google Scholar] [CrossRef] [Green Version]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Range |
|---|---|
| Hardness (A) | 20 ± 2 |
| Tensile strength (MPa) | 6.5 |
| Tear strength (kN/m) | 28 ± 2 |
| Mixing ratio (A:B) 1 | 1:1 |
| Room temperature curing time (h) | 4 |
| Air Pressure | 0 Kpa | 10 Kpa | 20 Kpa | 30 Kpa | 40 Kpa | 50 Kpa | 60 Kpa |
|---|---|---|---|---|---|---|---|
| No ring restriction | 0° | 4° | 15° | 34° | 48° | 63.5° | 78.5° |
| limited | 0° | 5° | 18° | 40° | 60° | 74° | 90° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Sun, J.; Wang, L.; Chen, G.; Xu, M.; Ni, J.; Ramli, R.; Su, S.; Chu, C. Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure. Materials 2022, 15, 1358. https://doi.org/10.3390/ma15041358
Chen C, Sun J, Wang L, Chen G, Xu M, Ni J, Ramli R, Su S, Chu C. Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure. Materials. 2022; 15(4):1358. https://doi.org/10.3390/ma15041358
Chicago/Turabian StyleChen, Chang, Jiteng Sun, Long Wang, Guojin Chen, Ming Xu, Jing Ni, Rizauddin Ramli, Shaohui Su, and Changyong Chu. 2022. "Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure" Materials 15, no. 4: 1358. https://doi.org/10.3390/ma15041358
APA StyleChen, C., Sun, J., Wang, L., Chen, G., Xu, M., Ni, J., Ramli, R., Su, S., & Chu, C. (2022). Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure. Materials, 15(4), 1358. https://doi.org/10.3390/ma15041358