1. Introduction
The paper concerns the static and dynamic behavior of tensegrity structures. Unlike conventional cable-strut frameworks, tensegrity structures are characterized by a system of internal forces, which keeps the elements of the structure in stable equilibrium (self-stress state). The most interesting for all are tensegrity structures characterized by the occurrence of infinitesimal mechanisms. In the absence of self-stress (initial prestress forces), such systems are unstable, i.e., geometrically variable. The stabilization occurs only after the introduction of initial prestresses. Their modification allows for controlling the static and dynamic parameters of the structure.
The subject of tensegrity systems is very popular. The main features of tensegrity structures are well-known. However, the topic of tensegrity systems is still being explored. The total number of papers on the Web of Science homepage using topic “Tensegrity” from 2001 to 2020 is approximately 1000 [
1]. From the beginning of the idea of tensegrity, i.e., the 1960s, to the present day, the most popular subject of papers is the search for geometrical configuration (form-finding)—a few sample papers from the last two years [
1,
2,
3,
4]. Other popular applications can be divided into three main areas:
algorithms changing the shape of the structure—optimization algorithms aimed at generating new topologies; the new topology aims to achieve the desired performance criteria, such as stiffness level [
5,
6,
7,
8],
shape control methods—methods examining the change of the shape of the structure under the influence of external forces [
7,
9,
10,
11,
12,
13,
14,
15,
16,
17],
parametric analysis taking into account the impact of the initial prestress on the static and dynamic behavior of structures [
18,
19,
20,
21,
22,
23,
24,
25,
26,
27].
The first area concerns the optimization of tensegrity structures. In [
5], the influence of changing the position of the struts (control of the length of the cables) on the dynamic characteristics was investigated. The subject of the consideration was a tensegrity module consisting of six struts and 18 cables. Both the non-linear dynamic model and the linearized version were used to describe the behavior of the module. It was shown that, with the increase in the prestress level, the differences between both approaches decrease. In [
6], the process of optimizing the prestressing of a cantilever flat tensegrity structure was presented. In turn, Bel Hadj Ali [
7] carried out the optimization of a tensegrity footbridge built of six fifteen-strut pentagonal modules. Studying the dynamic efficiency of the footbridge, the author was looking for a cost-effective design solution. In [
7], a method of designing the initial stresses using the eigenfrequencies of tensegrity structures was presented. The optimization of the self-stress state was carried out in conditions in which the tensegrity system can reach its maximum stiffness state. The analysis was carried out on the example of a flat structure built of three X modules and a three-dimensional structure, built with five Quartex modules. Caluwaerts and Carbajal [
8] optimized the shape of a single tensegrity module—a regular polyhedron built of six struts and a tower built of three Quartex modules. The number of cables in these structures was determined in the optimization process.
The most important research on the analysis of tensegrity structures focuses mainly on the second area, i.e., on the control of the shape of the structure under the influence of external forces. The search for the force-displacement relationship can be carried out by examining the damping and frequency of vibrations and by examining the change in geometry. Control methods are divided into passive and active. For example, Skelton and his team [
9] used a passive method and developed a nonlinear dynamic analytical model of tensegrity structures. In the proposed method, the kinematics is described by the position and velocity of the ends of the struts. The model was used for shape control and design of foldable structures. In another work [
10], Skelton described further analytical models allowing for easier control of the shape of tensegrity structures. In turn, in [
11], the behavior of pre-stressed tensegrity plates built with 36 and 256 Quartex modules was investigated. The considerations take into account the influence of the number of loose cables on the behavior of the plates. Fraternali, with a team [
12], studied the behavior of a tower built of four three-strut modules (Simplex modules). Faroughi and Lee [
13] analyzed the behavior of pre-stressed tensegrity plates composed of 20 and 36 Quartex modules. The authors investigated the change in the displacement of plates loaded with a harmonic force. They used a linear model in the analysis. In turn, in [
14], a new spatial tensegrity element was proposed for modelling the nonlinear dynamics of trusses subjected to a time changing load. The application of the model was presented on the example of a pre-stressed Quartex module and a tensegrity plate made of 20 such modules. In [
15], the authors used the Euler-Bernoulli beam element to analyze the dynamic behavior of planar and spatial tensegrity structures, taking into consideration the influence of the axial force on the transverse stiffness. A different model was used in [
16]. Initially, the authors formulated the single-element member and then introduced a grouped multi-element member, which was used to develop a dynamic model to study the dynamic properties of tensegrity structures. In [
17], a model using the dynamic relaxation method in combination with neural networks was proposed to calculate the nodal displacements of tensegrity structures. In [
7], the authors investigated the influence of the self-stress state on the dynamic behavior of the structure.
Compared to the abundant literature on the above-mentioned areas, the parametric analysis, determining the influence of initial prestress on the static and dynamic properties of tensegrity structures, has been developed slightly. In [
18], the influence of the initial prestress on the static properties of full-scale tensegrity skeleton of White Rhino was carried out. The static parametrical analysis of structures build with tensegrity modules, i.e., Simplex and Quartex, was performed, among others, in [
19,
20,
21]. In turn, in [
22,
23,
24], the influence of the initial prestress on the dynamic properties of the Simplex module was analyzed. In [
25], the impact of the initial prestress on the dynamic properties of a six-strut spherical module and a two-module cylindrical tensegrity model was considered. Bel Hadj Ali and Smith [
26] determined the effect of the self-stress level on the vibration frequency of a footbridge built of six fifteen-strut modules. However, the dynamic of tensegrity structures built with three- and four-strut modules were analyzed in [
27].
The analysis of the literature shows that the vast majority of works concerns the tensegrity design, the search for stable forms, optimization algorithms, methods of controlling the shape of tensegrity structures under the influence of external loads and discusses the use of these structures. Against this background, parametric analysis evaluating the influence of the state of self-stress on the static and dynamic properties of tensegrity structures is the subject of a few studies. In addition, these works relate to specific solutions. No monographic studies concisely describe the behavior of the full spectrum of structures. The studies known to the authors lack the analysis of dynamic stability understood in terms of the Bolotin approach [
28]. This problem is often confused with the issues of impulse loads. Dynamic stability analysis leads to the determination of parametric resonance areas (dynamic instability) that are dangerous for the durability of the structure. From the point of view of the physical interpretation of the phenomenon of dynamic instability, if the load parameters are within the defined limits of instability, the structure experiences vibrations with increasing amplitude. There is an abundant literature on parametric vibrations that essentially defines all the basic issues. Nevertheless, tensegrities are a special example of structures. They are characterized by an additional parameter, which is the self-stress state, which affects the shape and range of instability areas.
Taking the above into account, it seemed reasonable to take up the subject of dynamic analysis, in particular the analysis of dynamic stability of tensegrity structures. The main purpose of the work was to examine the behavior of tensegrity structures under the influence of periodic loads and to find the answer to the question of whether and to what extent initial prestress affect the distribution of areas of dynamic instability. The implementation of the formulated objective required:
performing a qualitative assessment involving the identification of self-stress states and infinitesimal mechanisms,
performing a quantitative assessment of the behavior of tensegrity structures under time-independent external loads:
- −
determination of the minimum and maximum initial prestress levels,
- −
assessment of the impact of initial prestress on the structural displacements,
- −
assessment of the impact of initial prestress on the rigidity of structure,
- −
assessment of the impact of initial prestress on the normal forces,
- −
assessment of the impact of initial prestress on the effort of structure,
performing parametric analysis determining the influence of initial prestress on dynamic properties, including the frequency and forms of vibrations,
conducting a dynamic stability analysis leading to the determination of the resonance frequency of periodic extortions and instable areas as a function of initial prestress.
Due to the wide scope, the work was divided into two parts. The first part contains the identification of self-stress states and infinitesimal mechanisms, the analysis of the static and dynamic behavior of tensegrities under time-independent external loads, whereas the second part will contain a dynamic stability analysis under periodic loads. This study aims to describe the behavior of the full spectrum of tensegrity structures in order to indicate the general characteristics of tensegrity structures, allowing for a better understanding of the specificity of this type of structure.
First, to illustrate the behavior of structures characterized by self-stress states and infinitesimal mechanisms, the authors propose to consider the simplest truss consisting of two elements. Despite the fact that this structure is not a tensegrity, its behavior fully reflects the behavior of tensegrity structures and makes it possible to determine of impact of initial prestress level on the static and dynamic parameters in explicit form contained in this study.
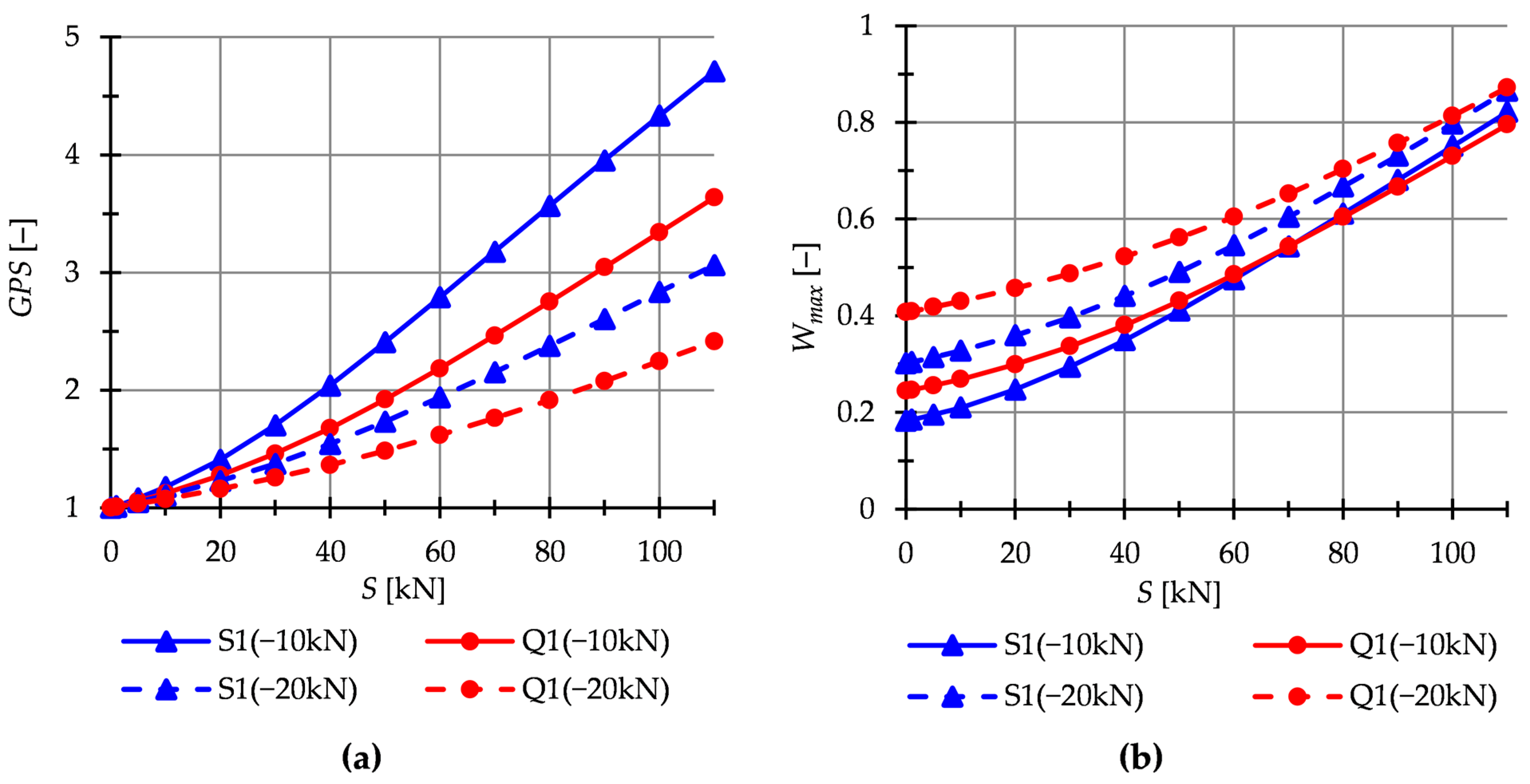
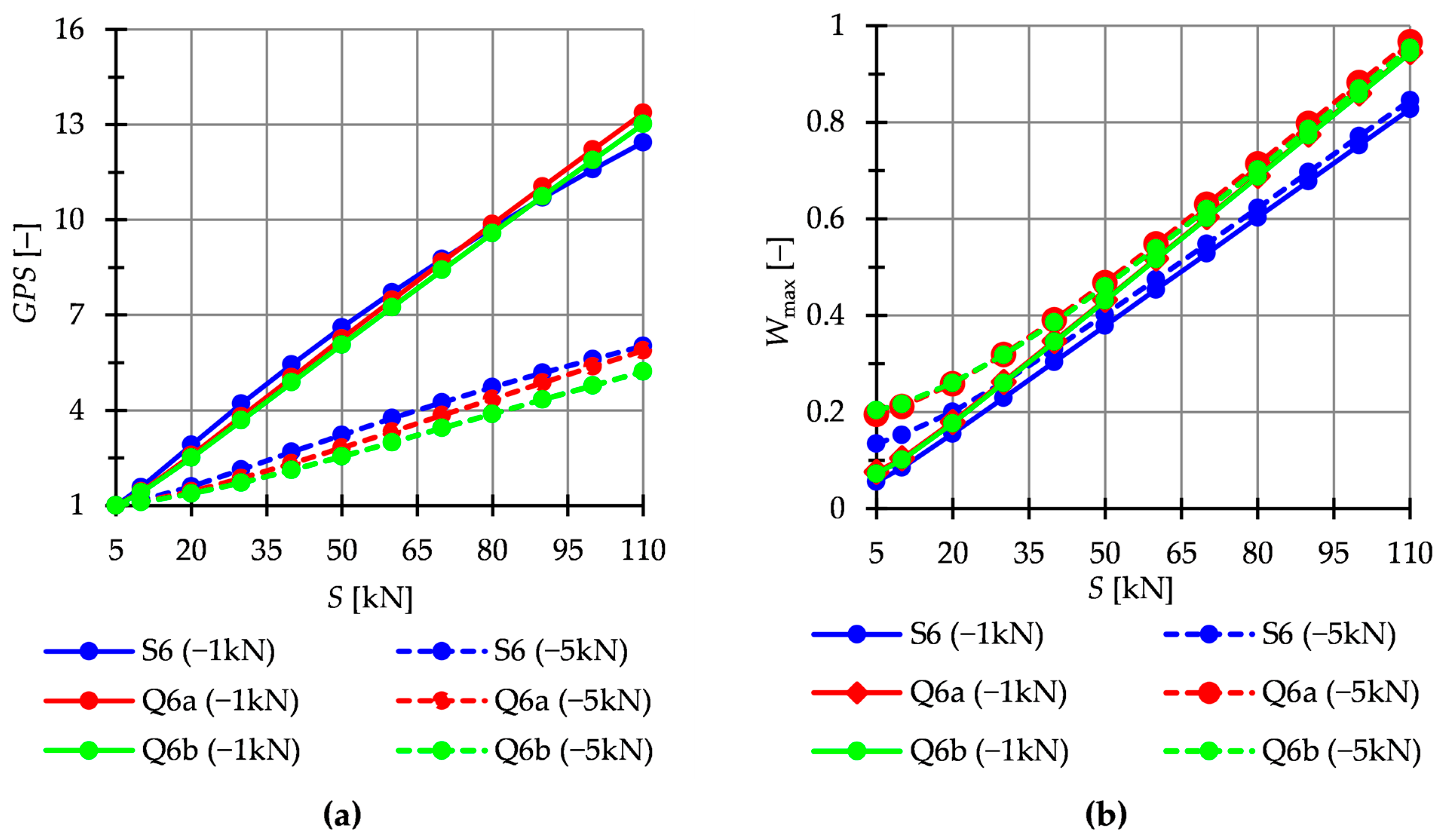
Next, tensegrity structures built with the modified Simplex and Quartex modules are considered. The aim of analysis was to compare three towers build with the most popular tensegrity modules. In this work, the authors tried to cover many different examples of tensegrity structures. The linear connection with various ways of joining the modules and different support conditions are considered. The Simplex modules could only be connected in one way, whereas the Quartex modules could be in two ways. In the first connection, the struts overlap in a plan view, while in the second, they form a star. The analysis was intended to fully describe the static and dynamic behavior of tensegrities by tracking the effort of the structures and checking the stability of the examined structures at each step of the analysis. The static behavior was studied by the analysis of the influence of initial prestress and external load on normal forces and on the rigidity of the structures. In the literature on tensegrity structures known to the authors, the influence of initial prestress level on stiffness was studied only as the effect on the displacements. In a structure with one non-zero displacement, the measure of stiffness depends only on this non-zero displacement. In this case, the assessment of the behavior of this displacement (local assessment) is also an assessment of the behavior of the entire structure (global assessment). In the case of structures with many degrees of freedom, it is not possible to trace all displacements for objective reasons. Therefore, it seems reasonable to introduce a parameter that will reliably determine the effect of the state of self-stress on the total rigidity of the structure at a given load. In the literature on tensegrity structures, however, no parameter characterizing the change in rigidity has been found. The authors propose a parameter to compare the rigidity of the structures. This parameter expresses the ratio of two strain energies, measured at the minimum and at the i-th level of initial prestress. It is the measure of changes in the stiffness caused by the influence of the initial prestress on the total stiffness of the structure at a given load. This parameter expresses the ratio of two strain energies, measured at the minimum and at the i-th level of initial prestress. It is the measure of changes in the stiffness caused by the influence of the initial prestress on the total stiffness of the structure at a given load. In turn, the dynamic behavior was studied by analyzing the influence of initial prestress and external load on frequencies.
A nonlinear analysis is used, assuming the hypothesis of large displacements. The presented study proves that some tensegrities are characterized by an abnormal dynamical behavior. These parametric considerations are crucial for the dynamic stability analysis of the behavior of tensegrity structures under periodic loads, which will be the subject of the second part of the paper. The dynamic stability analysis cannot be carried out without the analysis presented in this paper.
2. Methods of Analysis
The tensegrity structure is an
-element spatial truss (
) with
degrees of freedom described by a displacement vector
. The most characteristic feature of tensegrity structures is the self-stress state that stabilizes existing infinitesimal mechanisms. The modification of the level of self-stress state in tensegrity structures allows for controlling their dynamic properties. Another specific property of these systems is the size of the displacements, which can be large even with small deformations. To evaluate the static and dynamic behavior, a geometrically non-linear model is used, assuming the hypothesis of large displacements [
20,
21,
29,
30,
31]. The non-linear theory of elasticity in terms of the Total Lagrangian (TL) was adopted as the basis for formulating tensegrity lattice equations. The non-linear equation of motion is as follow:
where
is a consequent matrix of masses,
is an acceleration vector,
is a linear stiffness matrix that depends on an expansion matrix
and an elasticity matrix
,
is a geometric stiffness matrix that depends on an initial prestress
,
is a geometric stiffness matrix that depends on axial forces
, which results from external loads,
is a non-linear displacement stiffness matrix and
is an external load vector. In this part, the time-independent loads
are considered. The explicit matrices forms can be found, for example, in [
20].
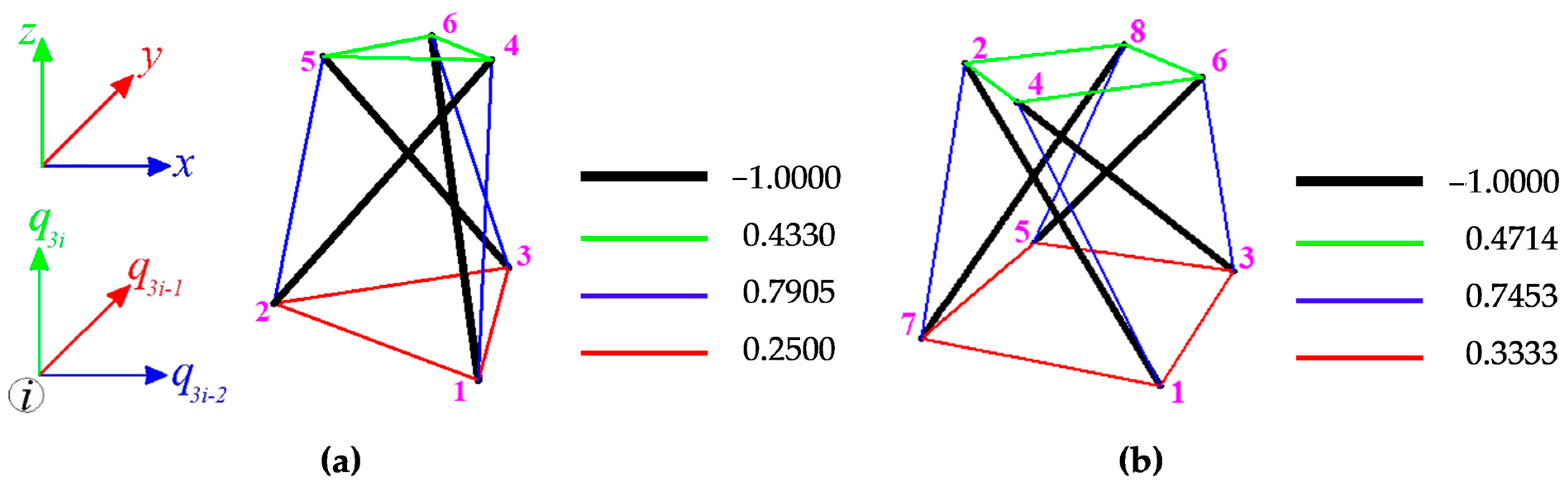
The first stage of the analysis leads to the identification of the immanent features, which are self-stress states and infinitesimal mechanisms. The existence of these features depends only on the expansion matrix
, so the geometrical and mechanical characteristics do not affect them (the elasticity matrix is an identity matrix
). The self-stress state is considered as an eigenvector
related to the zero eigenvalue of the compatibility matrix
, whereas the mechanism is an eigenvector
related to the zero eigenvalue of the stiffness matrix
[
18,
19,
21,
22,
32].
The second stage of analysis leads to the determination of the influence initial prestress levels on the static and dynamic behavior of structures. First, it is necessary to determine the range of initial pre-stresses, which is characteristic for each structure. The minimum prestress level is related to the appropriate distribution of normal forces in the elements of the structure. The external load can cause a different distribution of normal forces, and it can be corrected by the introduction of a proper level of initial prestress. The maximum prestress level is related to the load-bearing capacity of the most stressed elements.
2.1. Static Analysis
For traditional lattice structures, the static analysis can be performed assuming small displacements, i.e., a linear geometric model. It is an improper approach for the analysis of tensegrity structures. The quasi-linear model (second order theory) is also inadequate. Both approaches do not take into account the stiffening of the structure under the influence of external load. In tensegrity structures, the load causes displacements in accordance with the form of the infinitesimal mechanism that induces additional prestress of the structure—tensile forces generate additional tension in the cables and compression in the struts. For such regimes, the initial response should not be used to determine the behavior of the structure. Therefore, the analysis must be carried out with the assumption of the hypothesis of large displacements (third order theory).
To illustrate the influence of external loads on the stiffening, two approaches are used. The applied methods are the quasi-linear approach (second order theory):
and non-linear approach (third order theory):
Through the analysis, the influence of initial prestress level
on the following parameters is determined: Displacements
, normal forces
N, effort of the structure
(where:
is the maximum normal force and
is the load-bearing capacity) and stiffness of the structure, assessed by the global stiffness parameter (
) [
20,
21]:
where
and
are a secant stiffness matrix and a design displacement vector with a minimum initial prestress level, and
and
at
-th prestress level.
2.2. Dynamic Analysis
The important feature of tensegrity structures is the ability to control both static and dynamic parameters. The dynamic response can be studied by modal analysis [
7,
14,
15,
16,
23,
24,
26,
27,
29]. Without load,
the Equation (1) is quasi-linear. Taking into account the harmonic motion
, where
is the amplitude vector, the Equation (1) could be written as:
The modal analysis (5) leads to the determination of the natural frequencies of vibrations . For a tensegrity structure characterized by mechanisms, the omission of the influence of prestress in the Equation (5) leads to zero natural frequencies. These zero values correspond to the vibrations patterns that implement the mechanisms. If the mechanism is infinitesimal, the eigenvalues of the stiffness matrix are positive numbers—the prestress forces stabilize the structure. If the eigenvalue still remains zero, then the related mechanism is not infinitesimal. In turn, if the eigenvalue are negative numbers, the structure is not stable.
Taking into account the time-independent external load , the frequencies are considered. The load is treated as the initial disturbance of the equilibrium state, i.e., as the imposition of the initial conditions. Hence, in the further part of the paper, the frequencies are called free. Considering the external load, the modal analysis is non-linear. The calculations are carried out in six steps:
Note! In this step, the structure stability should be verified. The eigenvalues of the tangent stiffness matrix must be positive numbers.
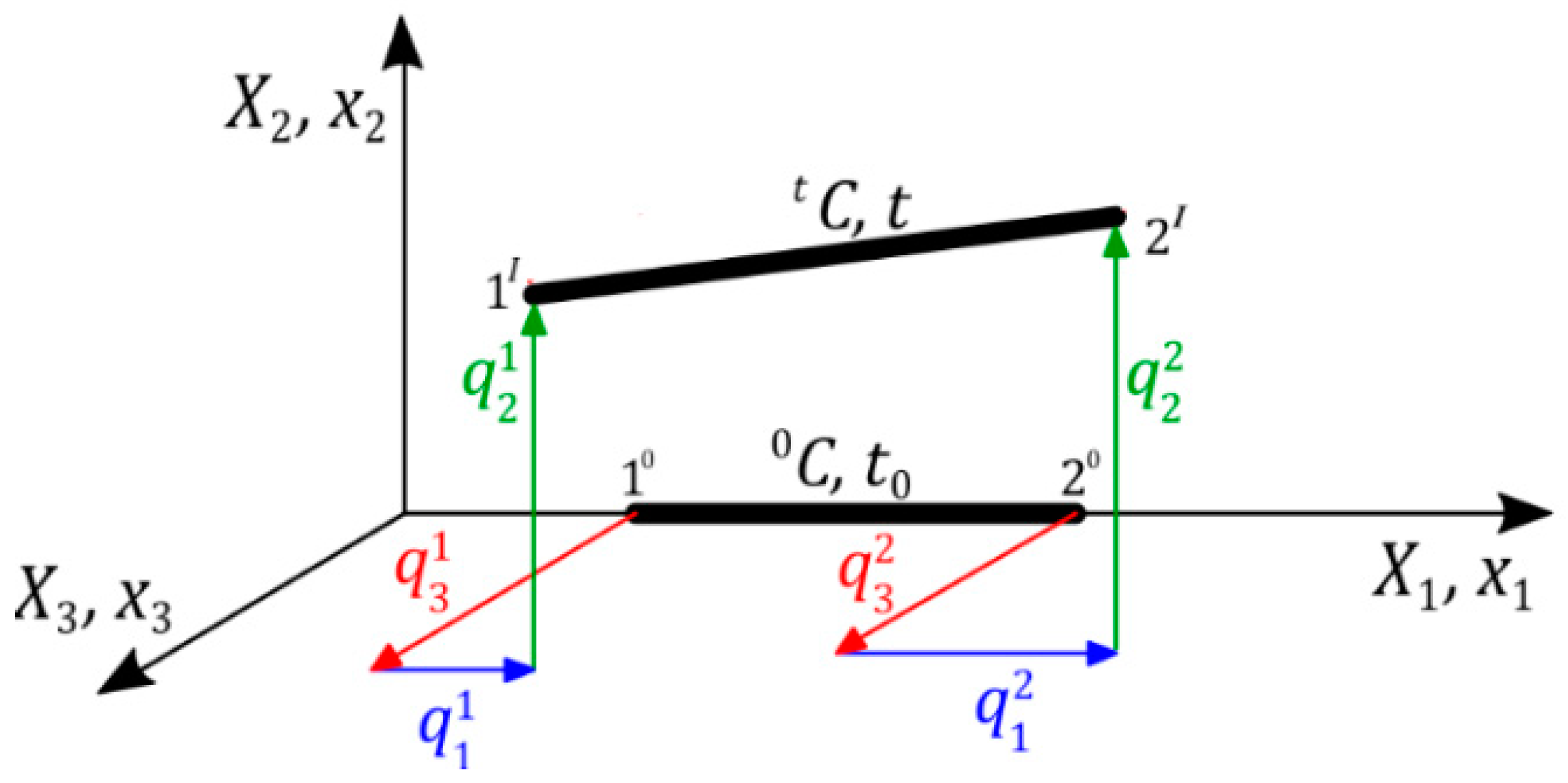
Step 2—determination of deformation of elements
(a spatial finite tensegrity element in an undeformed configuration (initial)
and a deformed configuration (actual)
(
Figure 1) is taken into account. In the initial configuration, the cross-sectional area and length are
and
, respectively, whereas in the actual configuration it is
and
:
Note! In this step, the prestress range should be determined. The lowest level of initial prestress must ensure the appropriate identification of the element type (cables or struts). Additionally, must provide the positive definite matrix . In turn, the maximum cannot generate the exceedance of the load-bearing capacity of elements.
3. Behavior of Structures Characterized by the Self-Stress State and Infinitesimal Mechanism
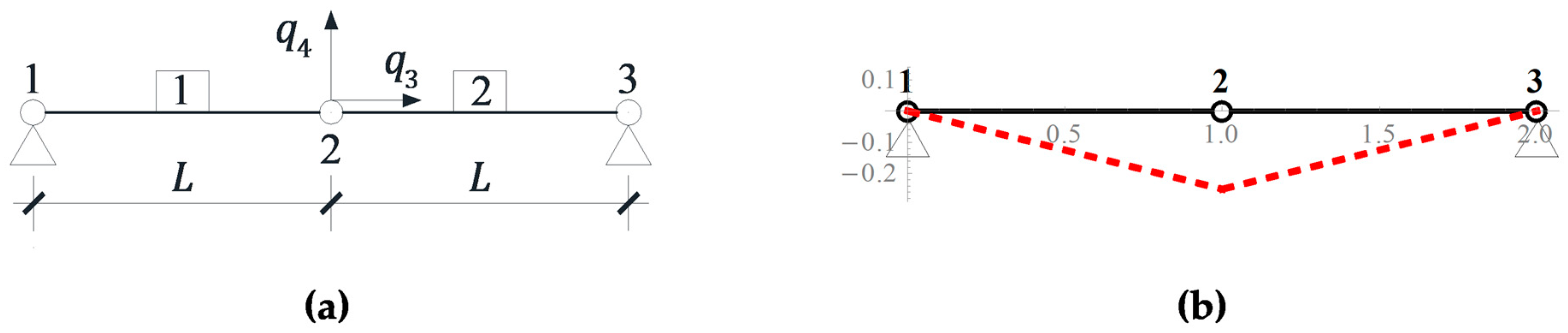
To illustrate the behavior of the structures characterized by self-stress states and infinitesimal mechanisms, the simplest truss consisting of two elements
is considered (
Figure 2a) [
33,
34]. The elements are characterized by the Young modulus
, the cross-sectional area
and the length
. The structure is characterized by two degrees of freedom
−
. The compatibility matrix takes the form:
The spectral analyses (1) and (2) lead to the following eigenvalues
and
. The zero eigenvalues are respectively correlated to the existence of one self-stress state considered as an eigenvector
(self-stress forces amount to
) and one mechanism considered as an eigenvector
(
Figure 2b). In turn on, the eigenvalues of the problem (3) are as follows:
For real structures, the first value (12)1 is always a positive number, while the second value (12)2 depends on the value of axial force :
if —the eigenvalue (12)2 is positive and the structure is stable; it means the self-stress states stabilizes mechanism, i.e., the mechanism is infinitesimal,
This structure is not a tensegrity because it is stable only for tensile forces (there are no compressed elements—struts). Nevertheless, its behavior fully reflects the behavior of tensegrity structures and makes it possible to determine the impact of initial prestress level
on the static and dynamic parameters in explicit form. The non-linear equation of motion (3) for this truss takes the following form:
where
is the concentrated force applied in node 2 in the vertical direction.
In next analysis, it was assumed that the cables with length
and diameter
are made of steel with Young modulus 210 GPa and density
. In order to illustrate the influence of external loads on the behavior, four values of load
are considered, i.e.,
,
,
and
. When applying initial prestressing forces, the load capacity
[
35] did not exceed 85% (
.
3.1. Static Analysis
In the static analysis, due to the symmetry of the structure and load, the displacement
q3 is zero, and the Equation (13) takes the form of a static equilibrium:
The application of non-linear theory (III order theory) takes into account the stiffening of the structure under the influence of external load, which is responsible for the displacements consistent with the infinitesimal mechanism
. If this influence is neglected (II order theory), the solution of Equation (14) leads to the following relationship:
The absence of initial prestress (
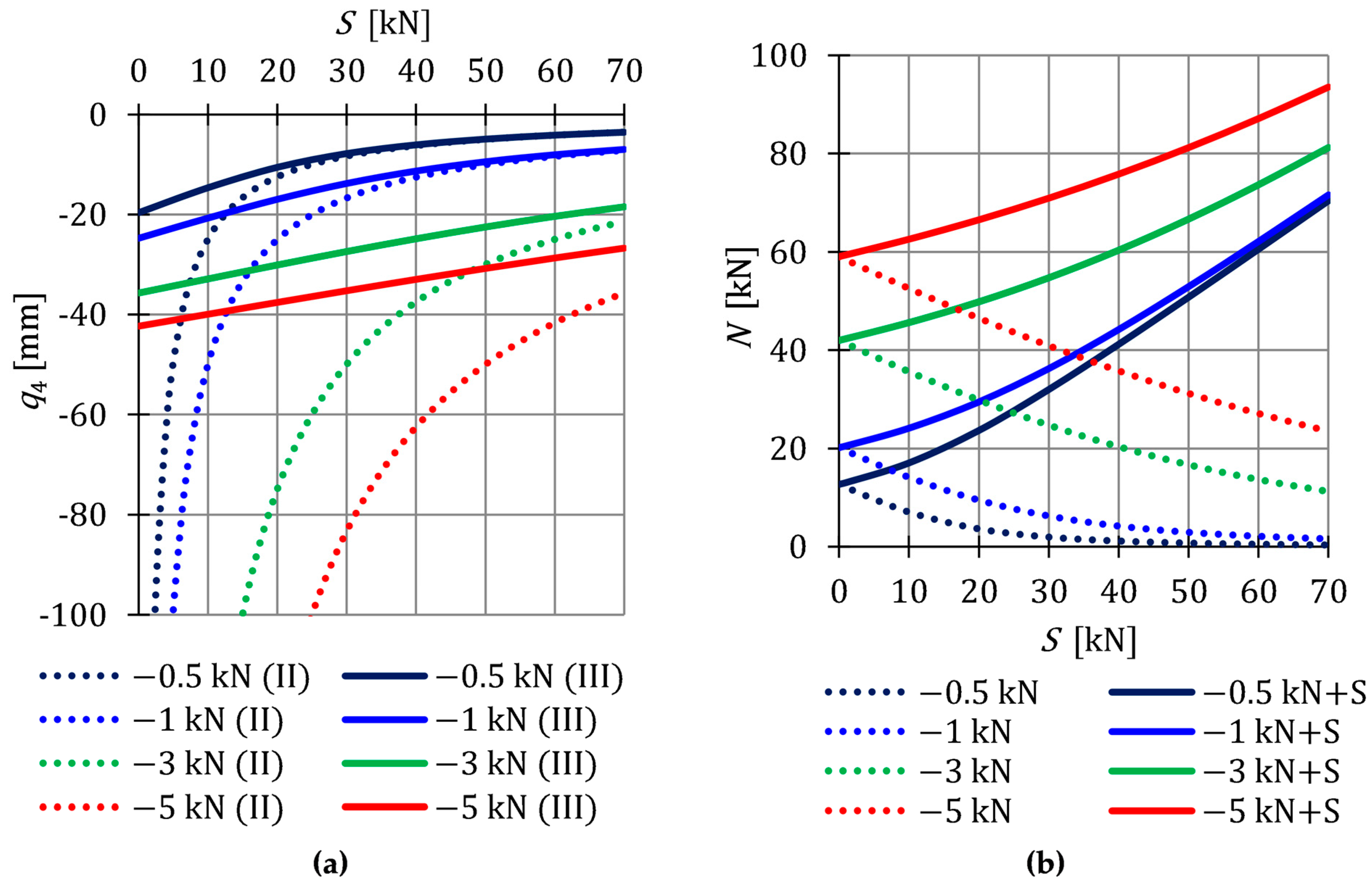
) caused the displacement (15) to increase to infinity. The impact of the initial prestress level
S on the displacement
is shown in
Figure 3a.
The stiffness of the considered structure is not only conditioned on the geometry and material characteristics, but also on the level of initial prestress
, which stabilizes the infinitesimal mechanisms, and on the external load
. With the increase of prestressing forces, the differences between the calculations made according to the second and third order theory are decreasing. The influence of non-linearity is most significant at low values of initial prestress forces. With lower values of the load, the initial prestress has a higher impact on the total rigidity of the structure—the differences between the displacements obtained using the second and third order theory at
are smaller than at
. The external load prestresses the structure—additional tensile forces are generated in the cables. However, after introducing the initial prestress, the normal forces from the external load successively decrease, and thus its influence on the displacement decreases.
Figure 3b shows the change in the value of normal forces arising from loads
and normal forces generated jointly by the load and prestress forces
.
In the presented structure, there is only one non-zero displacement, so the assessment of the behavior of this displacement (local assessment) is also an assessment of the behavior of the entire structure (global assessment). In the case of structures with many degrees of freedom, it is not possible, to trace all displacements for objective reasons. Therefore, the authors propose a parameter that helps to assess the influence of the self-stress state on the total rigidity of the structure at a given load. The literature on tensegrity structures does not contain any parameter characterizing the change in rigidity. In the paper, the global stiffness parameter (
) (6) is used. In the case of the analyzed structure, the nature of changes in the
can be expressed explicitly:
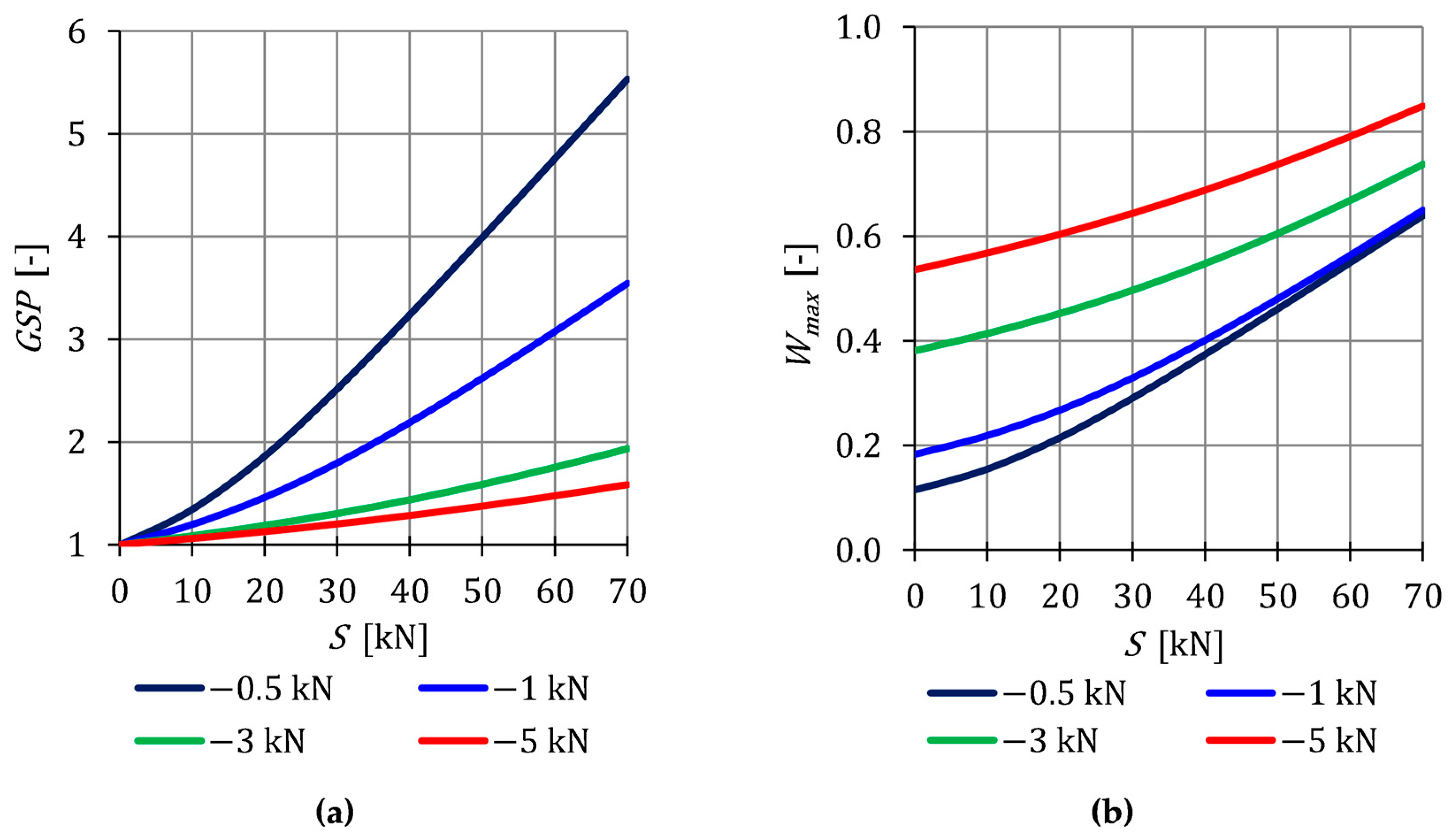
The parameter (16) is presented in
Figure 4a. At the maximum of initial prestress for
,
is
times higher than for
. This confirms the previous conclusions that, with lower external load, the initial prestress forces have a higher impact on the overall stiffness of the structure. Additionally, due to the effect of the initial prestress forces on the normal forces
, the effort of structure
, depending on the level of initial prestress, is also monitored (
Figure 4b). In the case of the effort of the structure, as in the case of the stiffness, the influence of initial prestress decreases as the load increases.
3.2. Dynamic Analysis
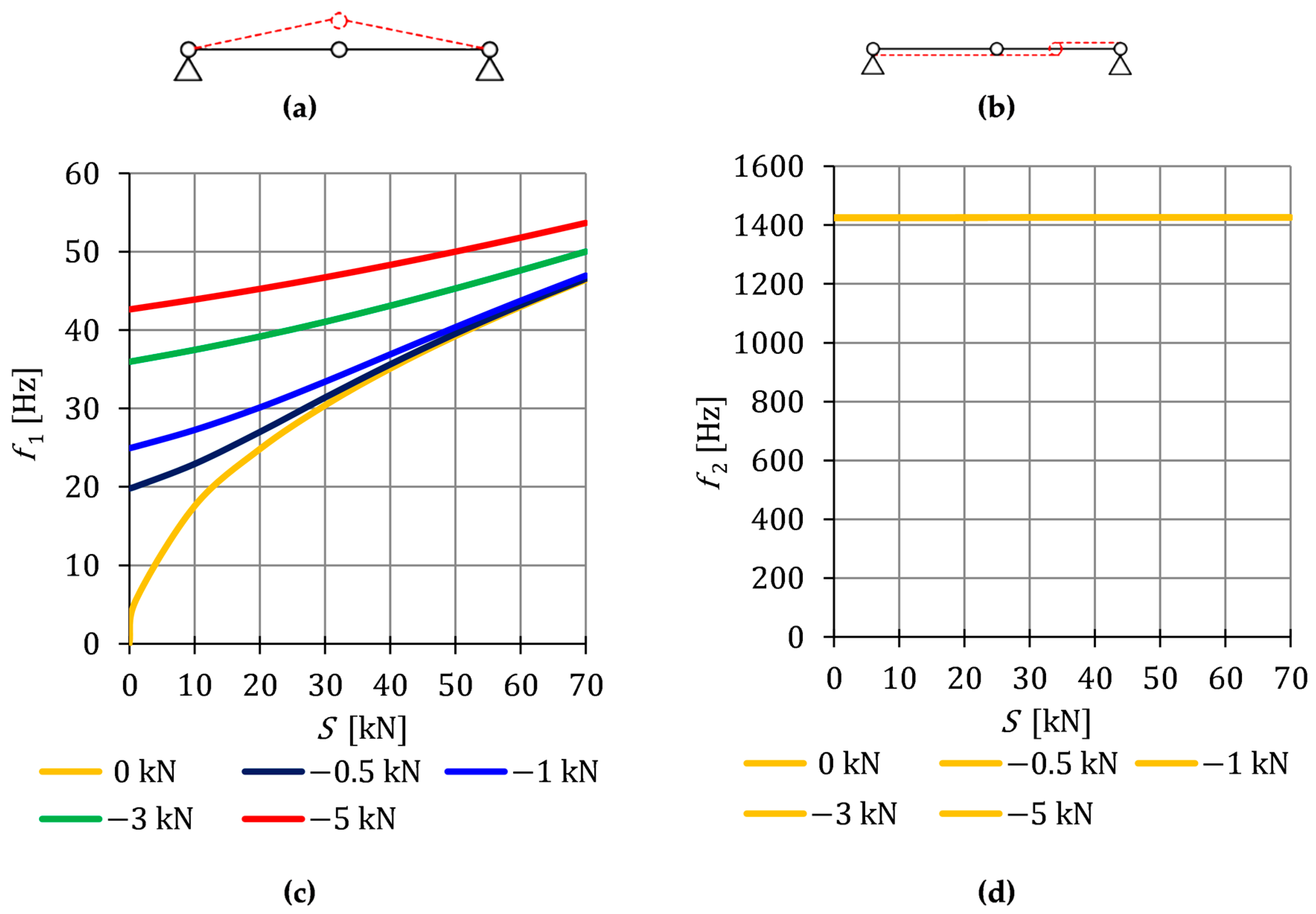
In the dynamic analysis, Equation (13) for the two-element truss takes the following form:
The non-trivial solution of Equation (17) leads to the determination of the natural frequencies:
and corresponding to them the vibration modes:
The most dependent on the self-stress state is the first frequency (18)1:
if
—the frequency (18)
1 is equal to zero which corresponds to the mechanism described by the vibration mode (19)
1 (
Figure 4a),
In the case of the second frequency (18)
2, the influence of initial prestress is negligible, because under the condition of the bearing capacity, the values of prestressing forces S are much lower than the longitudinal stiffness (S ≪ EA). The second form of vibrations (
Figure 5b) is described by the vector (19)
2.
The impact of initial prestress
on the natural frequency
is showed in
Figure 5. The value of the first frequency varies from
to
(
Figure 5c), while the second frequency is practically insensitive to the change—at the prestress level at
it is
and at
—
(
Figure 5c).
Additionally, the free frequencies
are calculated on the basis of the Equation (10). In the case of the first frequency (
Figure 5c), the external load prestresses the structure —additional tensile forces are generated in the cables and the initial dynamic response (at
) corresponds to the values of the natural frequency at the following force levels:
,
and
. The second free frequency does not depend on the initial prestress and is equal to the natural frequency—
.
The conducted analysis showed that the influence of the self-stress state on the first vibration frequency diminishes with the rise in the load value. The second vibration frequency is not correlated to both the change in the level of prestress and the impact of external loads.
5. Conclusions
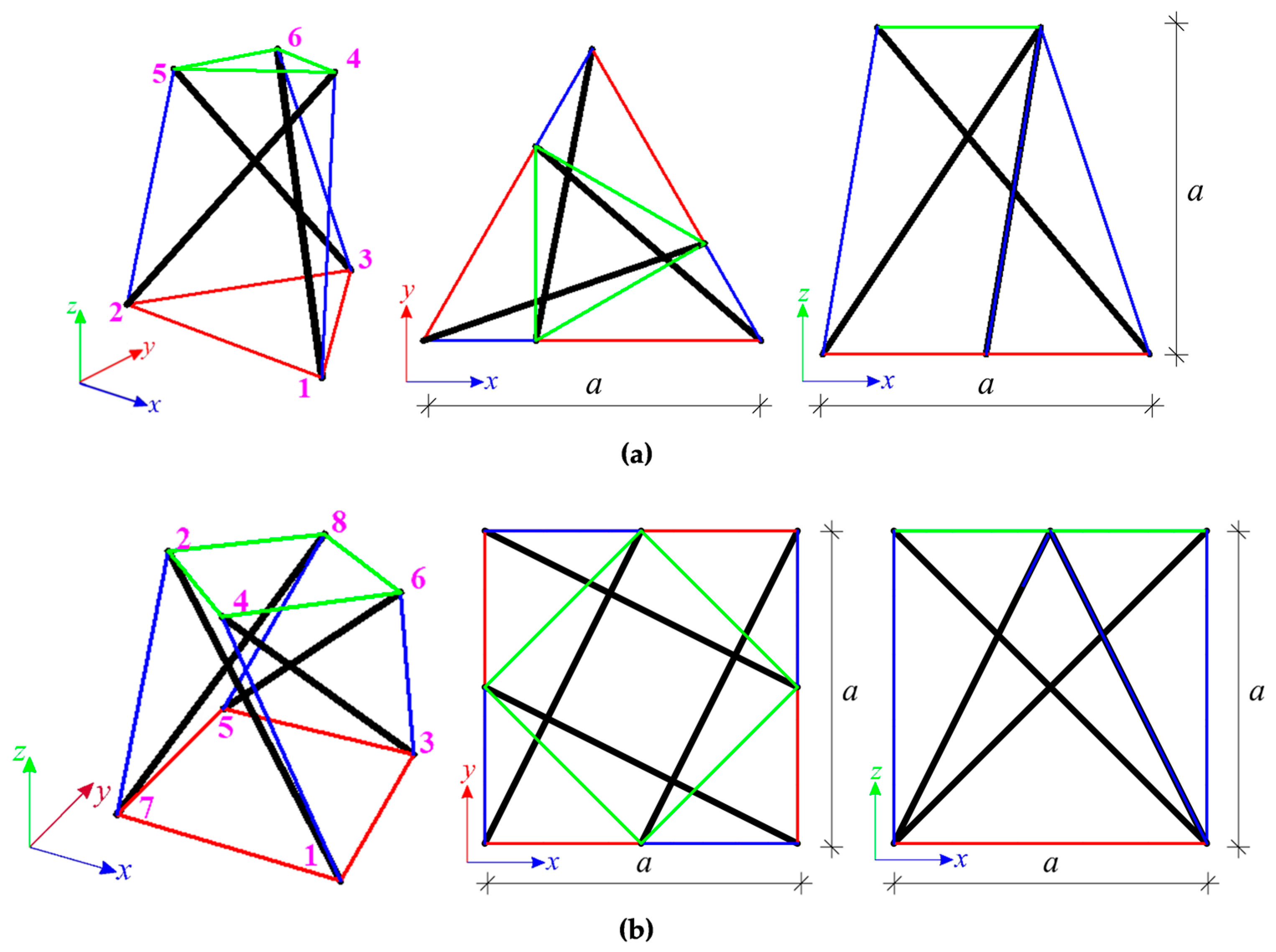
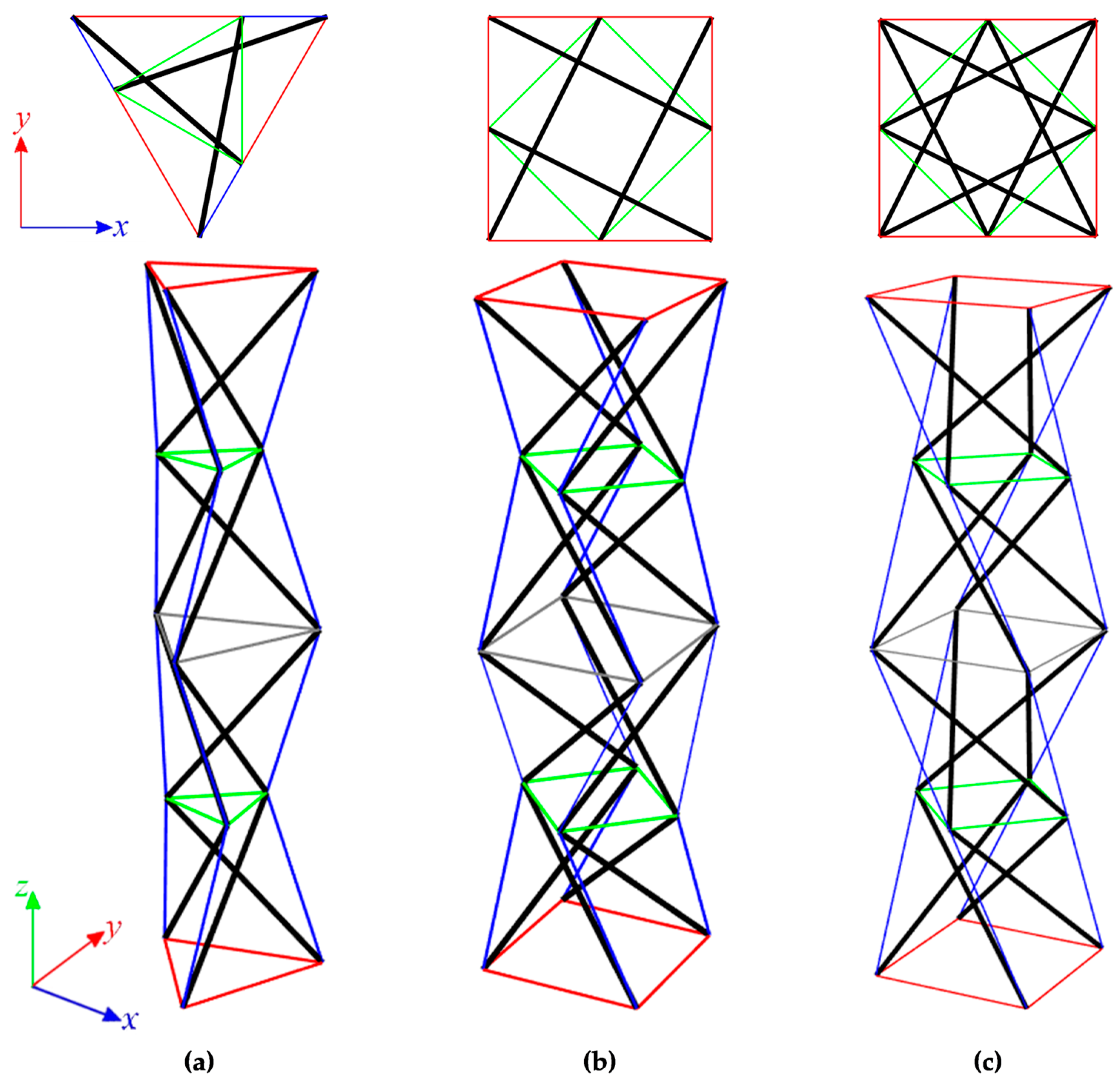
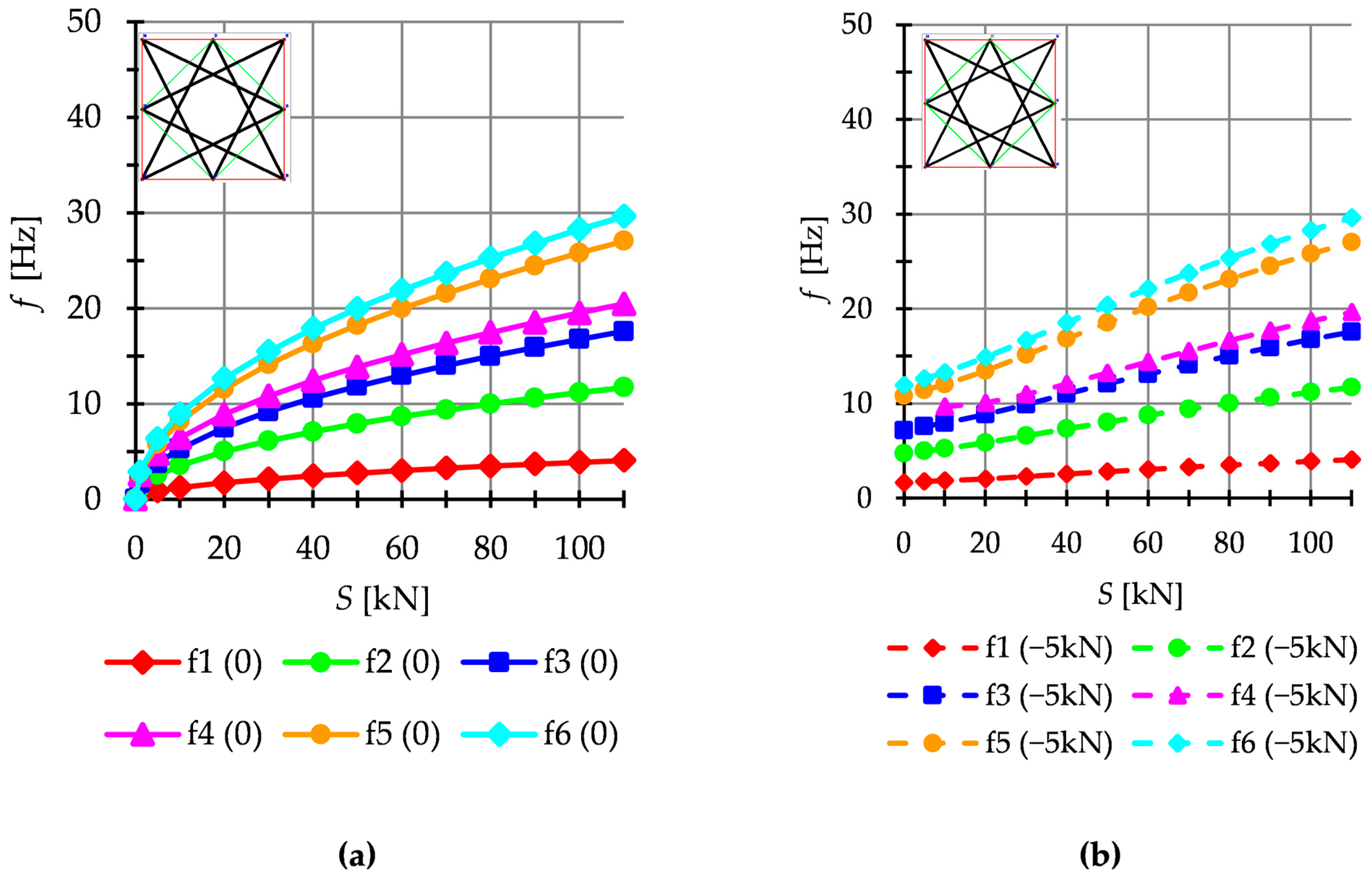
In this paper, the static and dynamic behavior of tensegrity structures is explored. First, to illustrate the behavior of the structures characterized by self-stress states and infinitesimal mechanisms, the simplest truss, consisting of two elements, is considered. For such a simple structure, it is possible to obtain the static and dynamic parameters in an explicit form. This approach makes it easier to understand behavior of tensegrity structures. Next, the structures built of linearly connected the most popular tensegrity modules (modified Simplex and Quartex modules) are considered. Two ways of connecting the Quartex modules are considered, i.e., connection A—the struts overlap in a plan view, and connection B—the struts form a star. Additionally, different support conditions are analyzed. Particularly, the impact of initial prestress on the static and dynamic parameters is analyzed.
In the case of the qualitative analysis, which leads to the identification of immanent features, regardless of the type of modules and the way they are connected, the structures behave the same. Only the support conditions affect the result of the analysis. In contrast, for the quantitative static and dynamic analysis, the behavior of structures depends on the type of modules and the way they are connected.
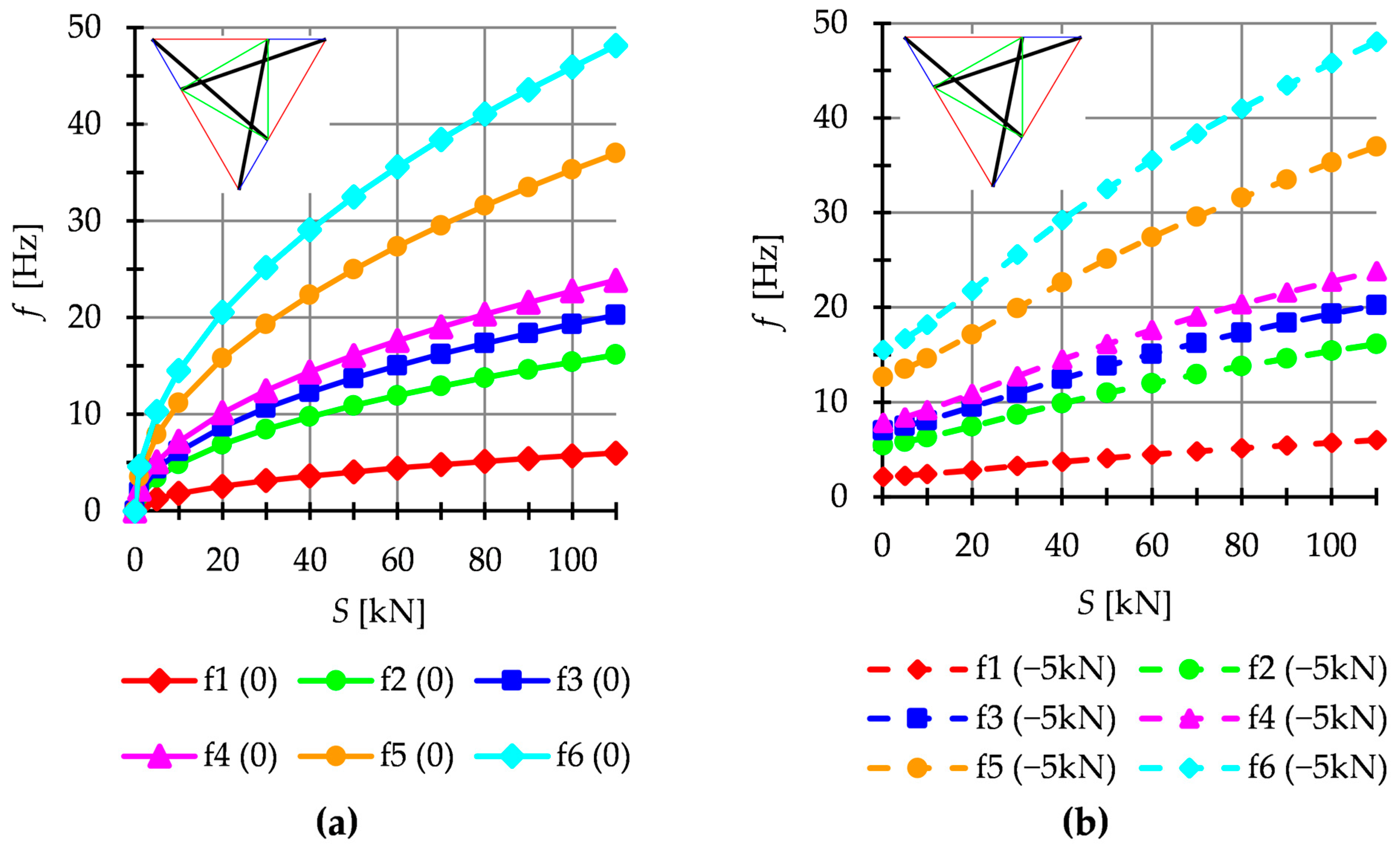
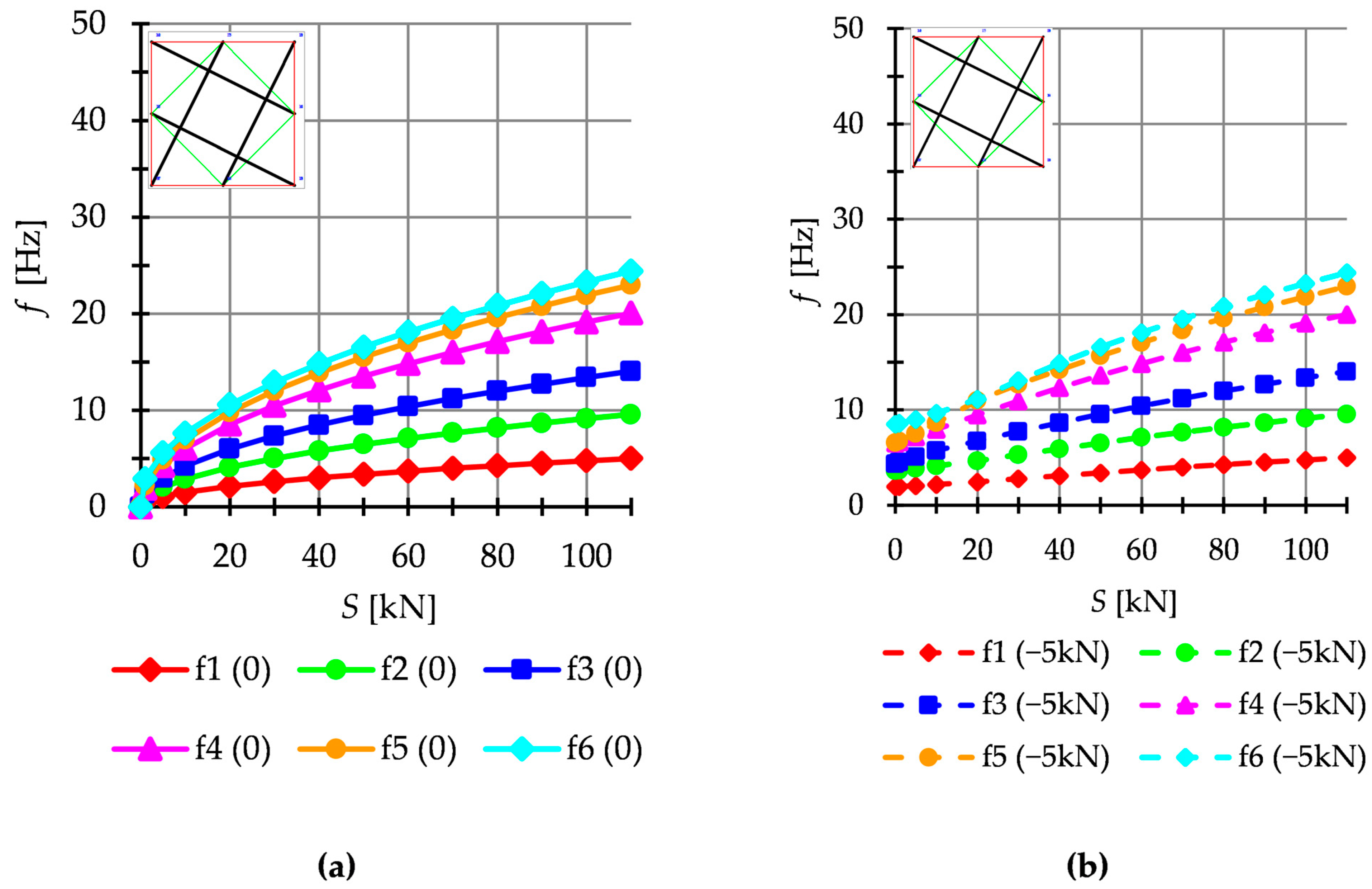
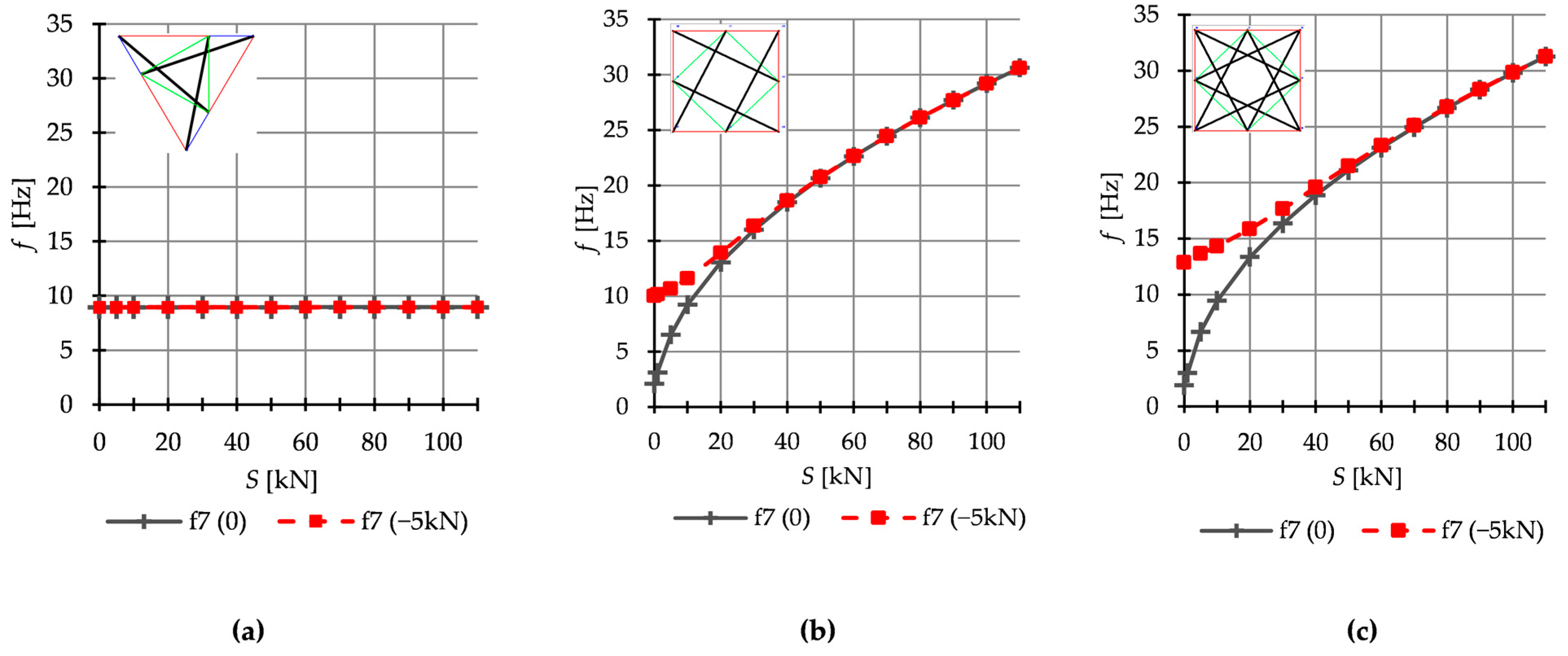
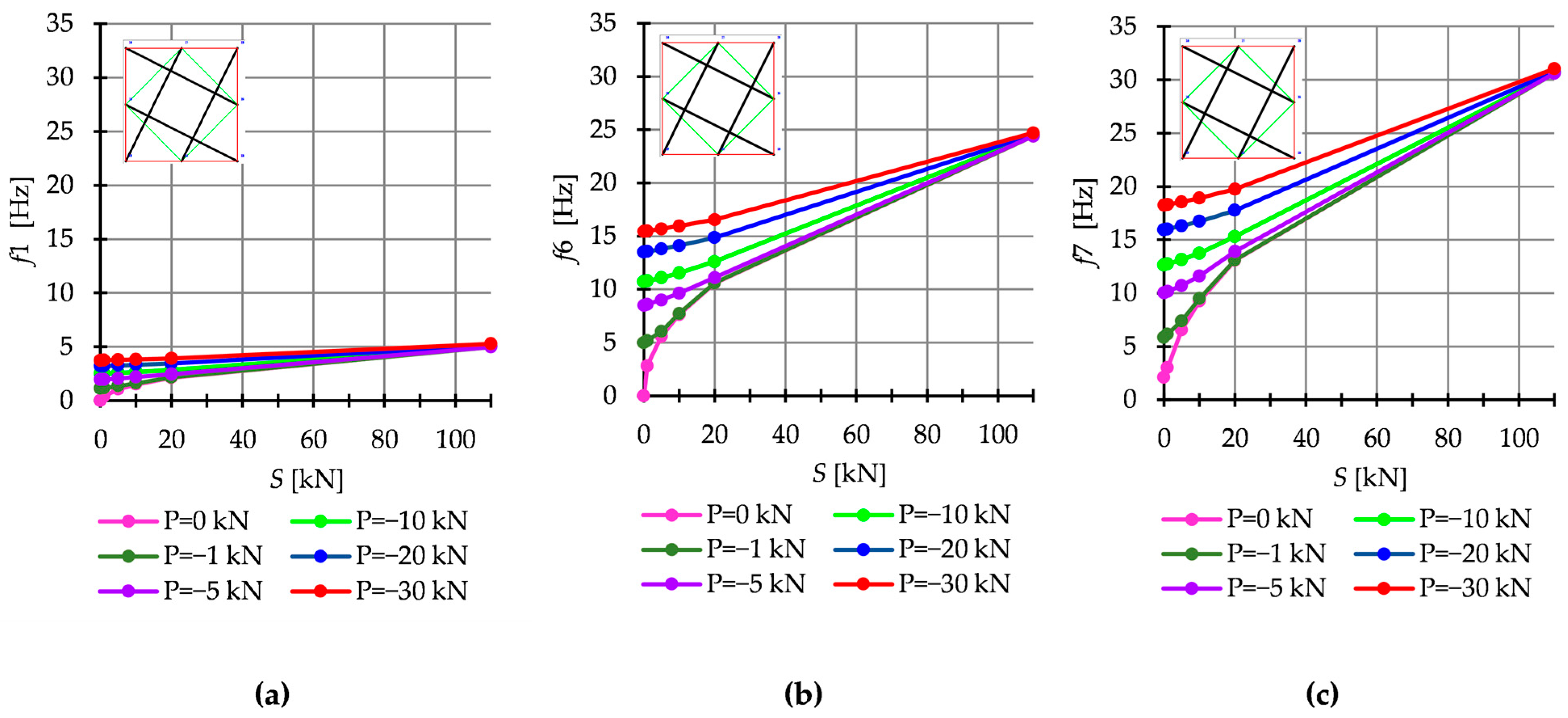
In the dynamic analysis of tensegrity structures, it is well known that the number of prestress-dependent natural frequencies is equal to the number of infinitesimal mechanisms. With no prestress, these frequencies are zero, and the correlated forms of vibrations implement the mechanisms. After applying the self-stress state, the frequencies increase in proportion to the square root of that state. The sensitivity of these natural frequencies to the self-stress state is so great that the change in the level of prestress can be auspiciously used to control the dynamic properties of the structure. Other frequencies theoretically should be practically insensitive to self-stress changes. If several mechanisms are identified, the higher frequencies are more susceptible to the initial prestress changes.
Considering the examples presented in this paper, the highest frequencies were obtained for the structures built with the Simplex module, followed by structures built with the modified Quartex with the struts forming a star, while the lowest frequencies were obtained for the structures built with the modified Quartex with the overlapping struts. In addition, the Simplex towers behave typically, whereas both Quartex towers exhibit an abnormality in the dynamic analysis. Theoretically, as mentioned before, the number of natural frequencies, depending on the prestressing, is equal to the number of infinitesimal mechanisms. However, in the case of some analyzed structures it is different. Only structures built with Simplex modules behave according to this rule. However, for the Quartex structures, there is an additional frequency dependent on the initial prestress. In the absence of initial prestress , the natural frequency is not zero and its value varies with the change of prestress. The additional free frequency behaves the same. The considerations contained in this paper indicate the unusual behavior of tensegrity structures. The obtained results are important for the dynamic stability analysis of the behavior of tensegrity structures under the periodic loads, which will be the subject of the second part of the paper. The dynamic stability analysis cannot be carried out without the analysis presented in this paper.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}