
Investigation of Different Features for Baseline-Free RAPID Damage-Imaging Algorithm Using Guided Waves Applied to Metallic and Composite Plates

 , , and
, , and
Abstract
:1. Introduction
- Reconstruction is performed with only one type of feature for damage reconstruction, i.e., the Pearson correlation coefficient;
- Reconstruction can be performed only when both the baseline data and defect data are available because the SDC functions by comparing the defect-free data and defect data;
- This algorithm is generally used for the localization of a defect, and it is generally sufficient in this task in most cases. But the quantification of the defect, such as with respect to the length, orientation, and size of the damage areas, is usually ignored, which limits the practical application of this algorithm.
- Performing modifications to the RAPID algorithm to be able to perform damage imaging with only baseline-free data;
- Exploring features other than Pearson’s correlation coefficient that can be used for the RAPID algorithm;
- Devising a quantification method with which to determine the parameters of a defect.
- The inclusion of three distinct specimen types;
- The introduction of varying defect types within each specimen;
- The deployment of diverse transducers to capture data for the different specimen scenarios, facilitating comprehensive damage imaging.
2. Specimens Used in the Study
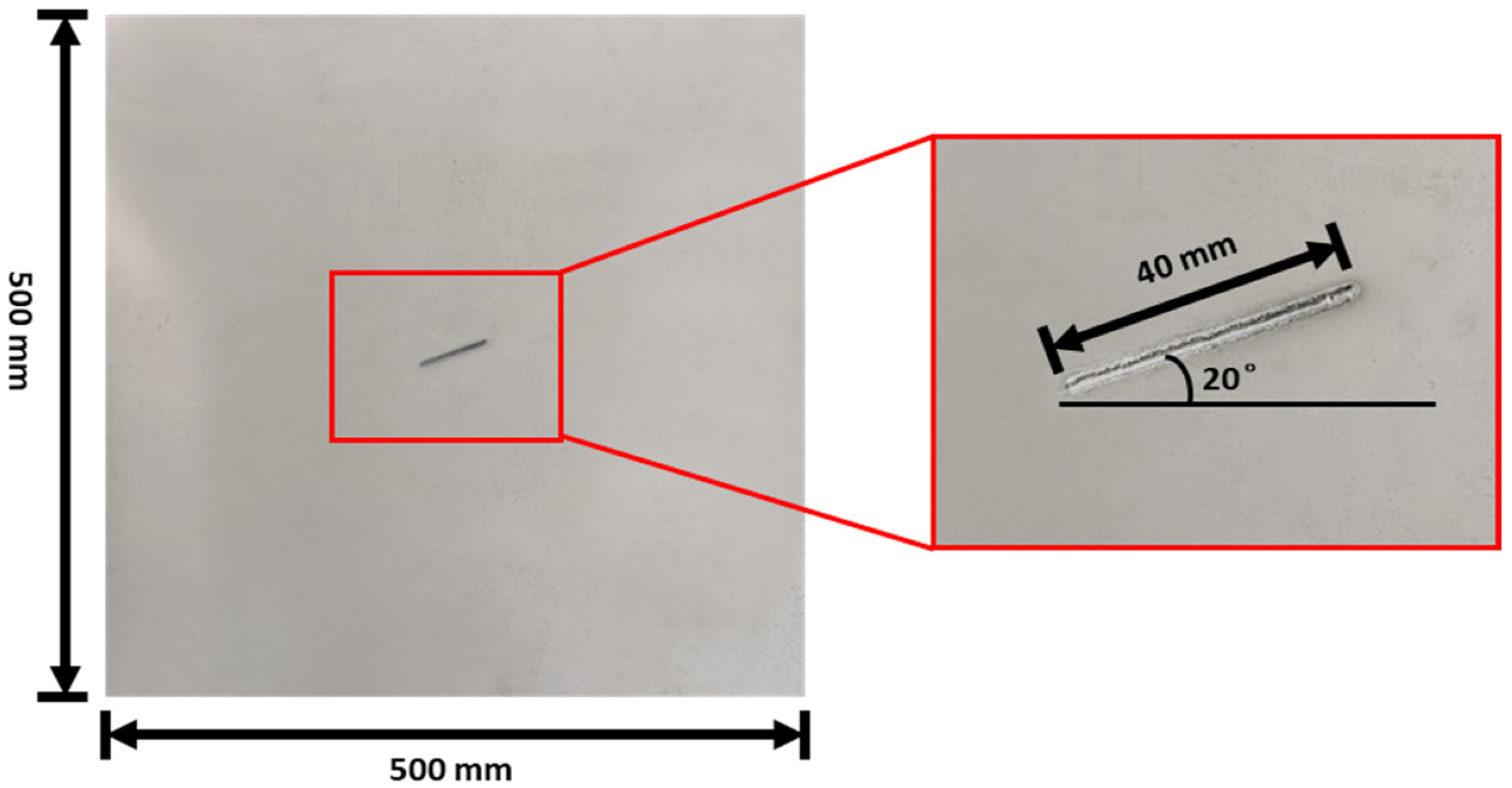
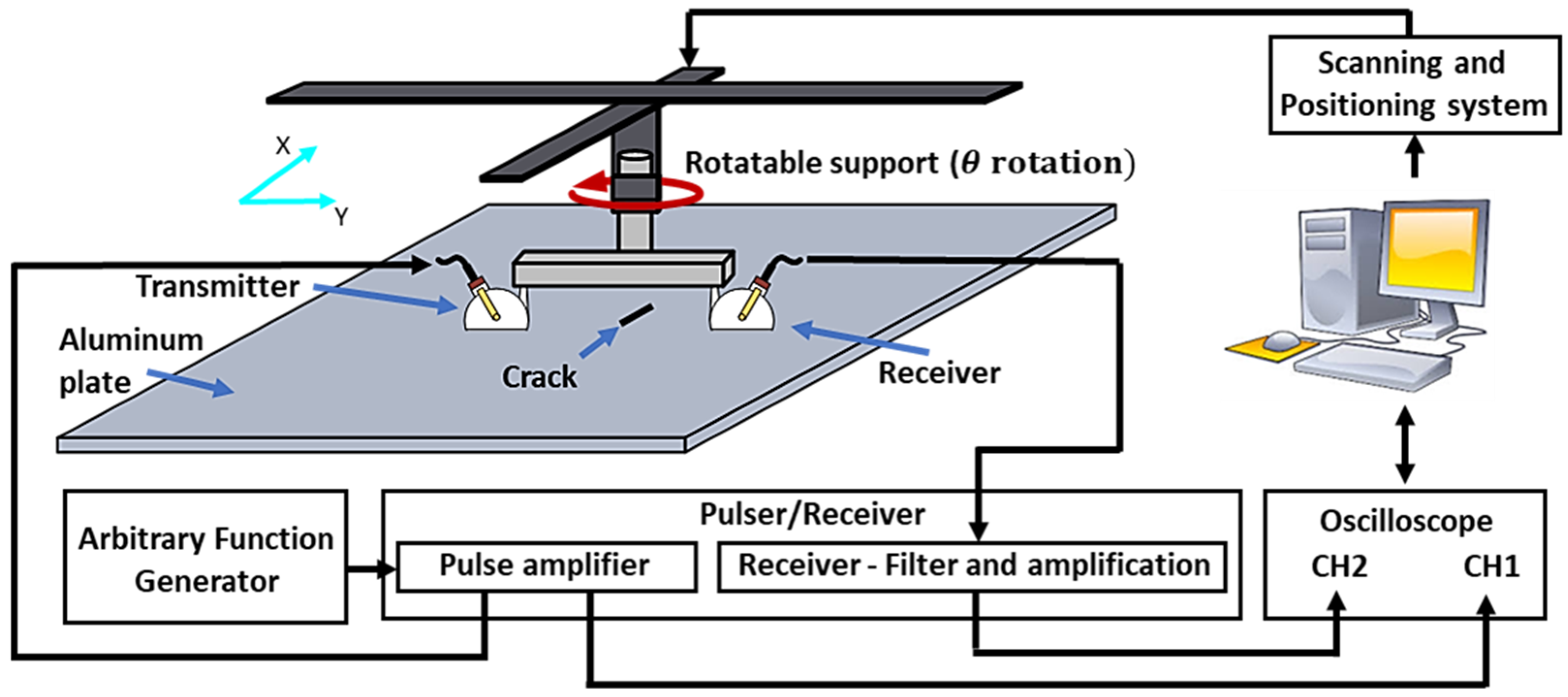
2.1. Aluminum Plate
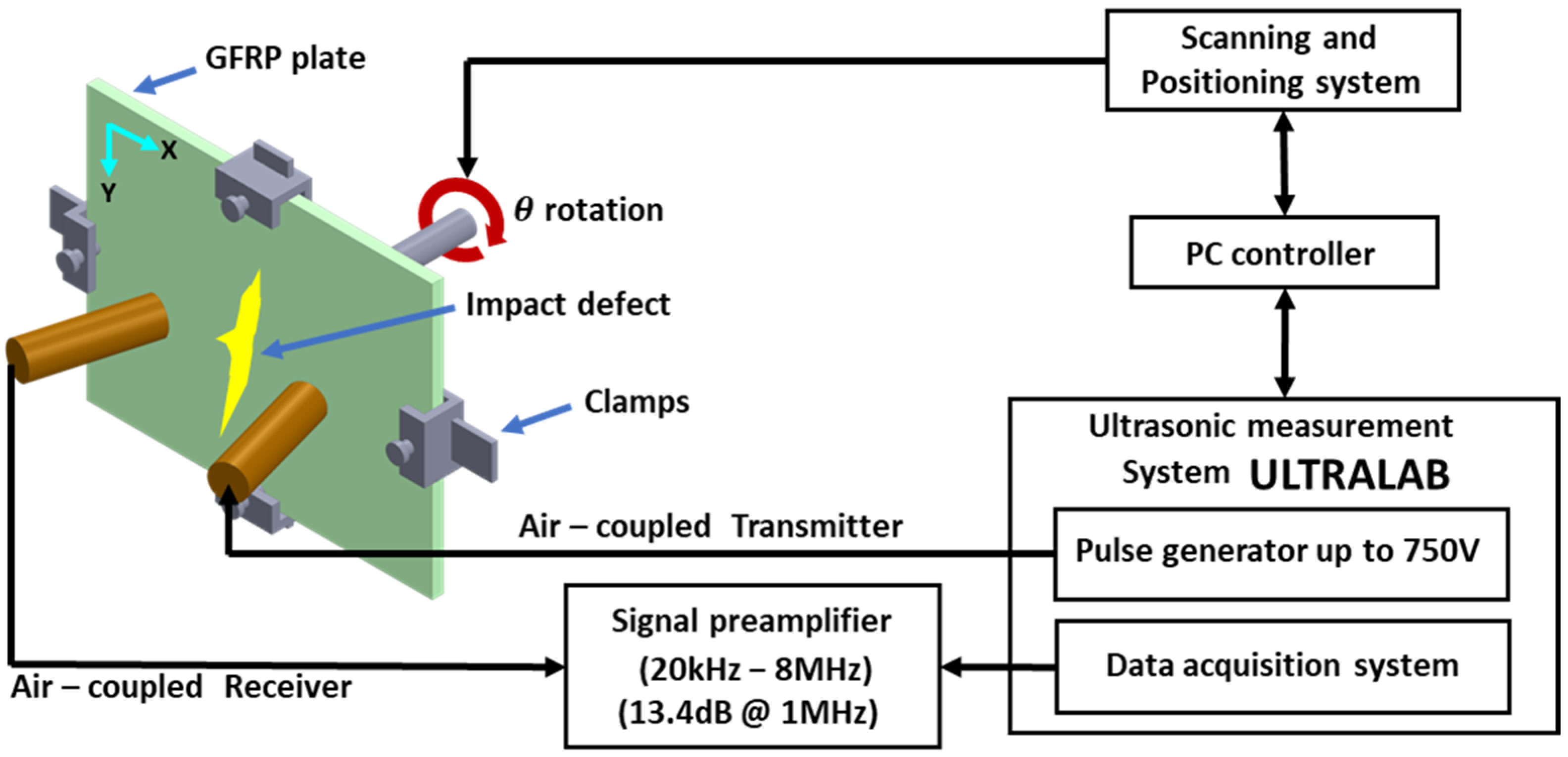
2.2. Pultruded GFRP Plate
2.3. Laminate GFRP Plate
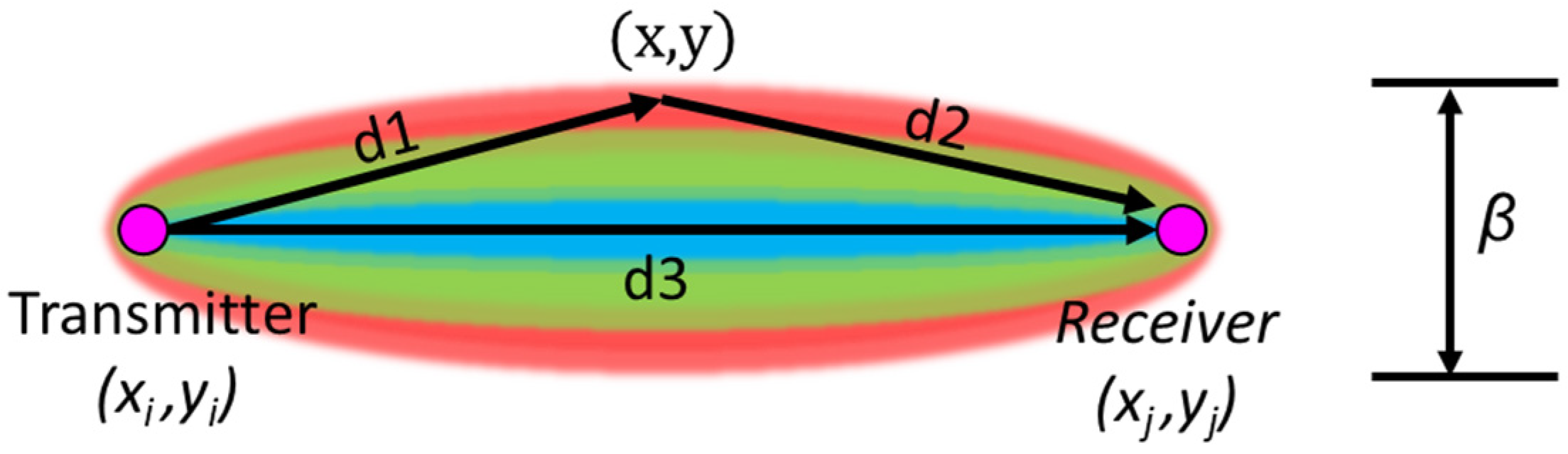
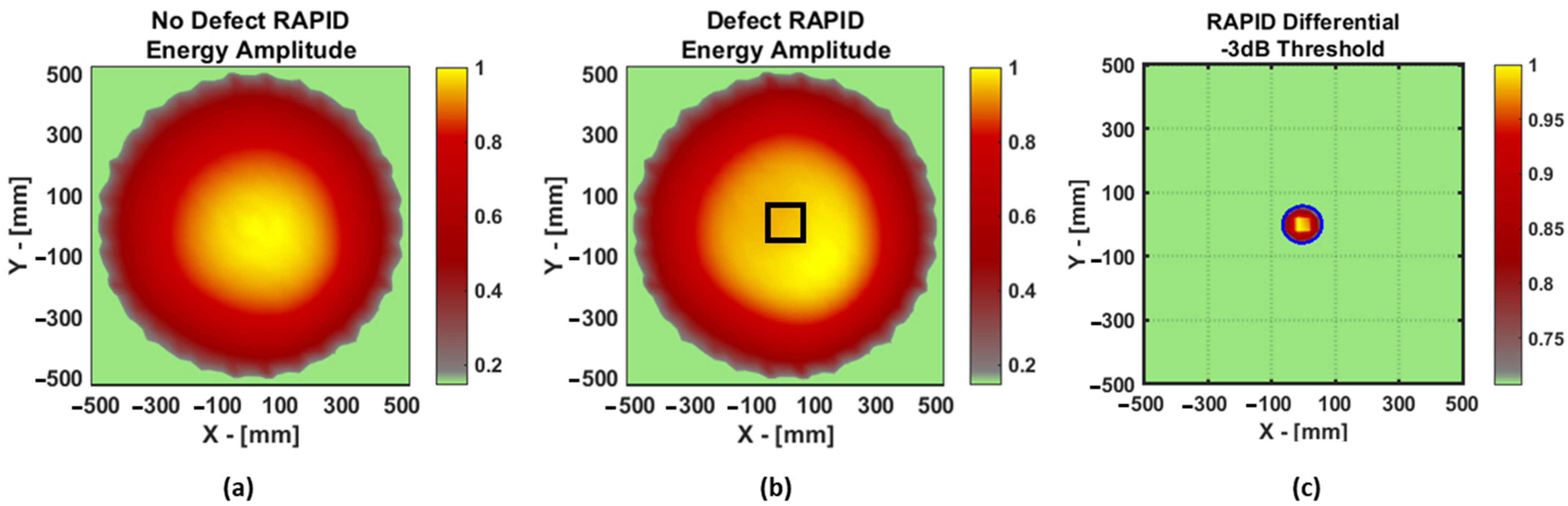
3. RAPID
4. Features for Reconstruction Algorithm
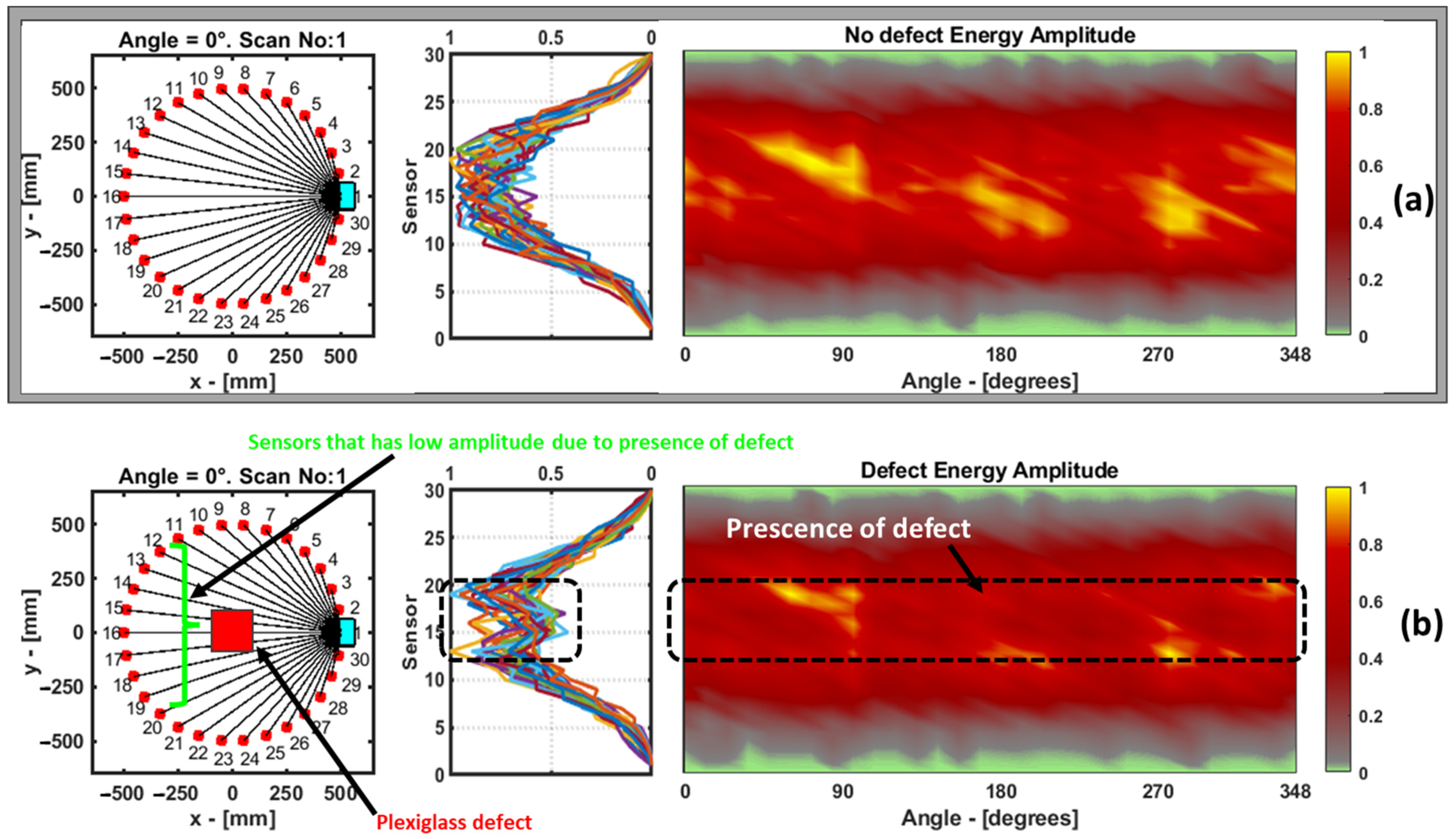
4.1. Amplitude in Time Domain
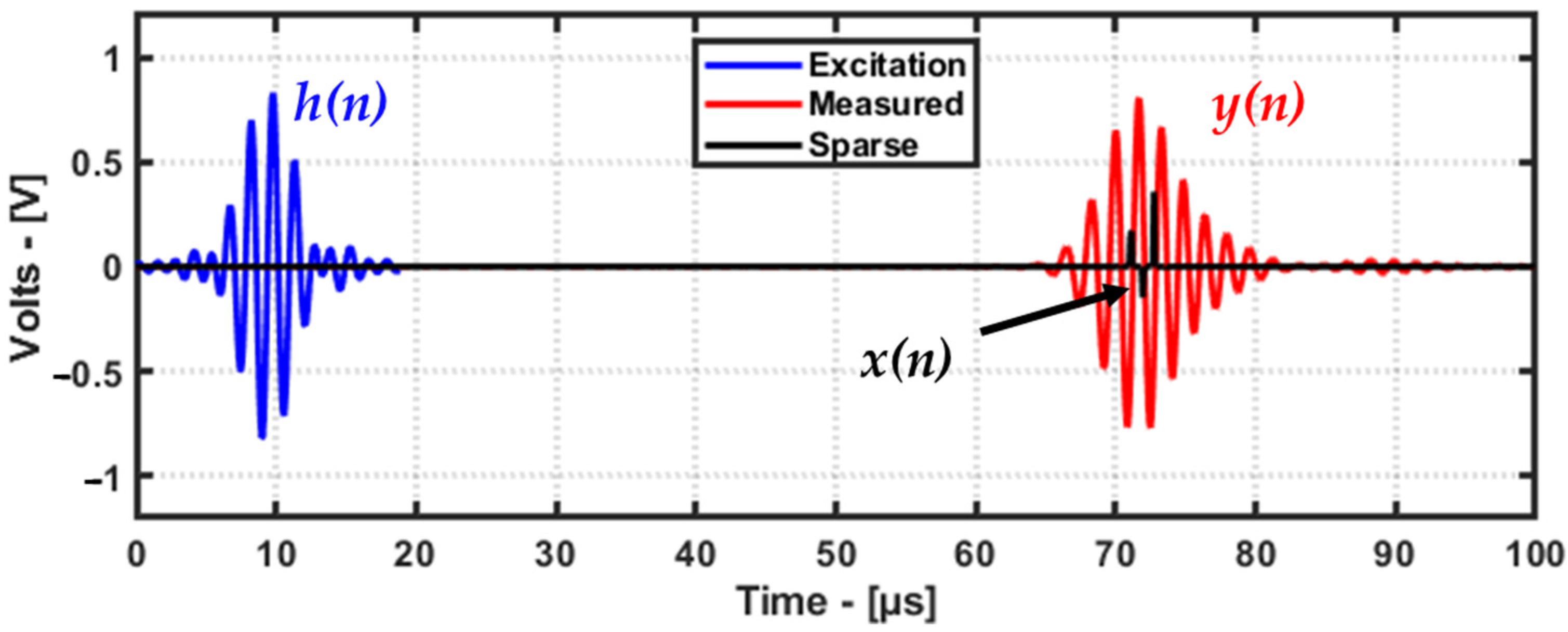
4.2. Deconvolution
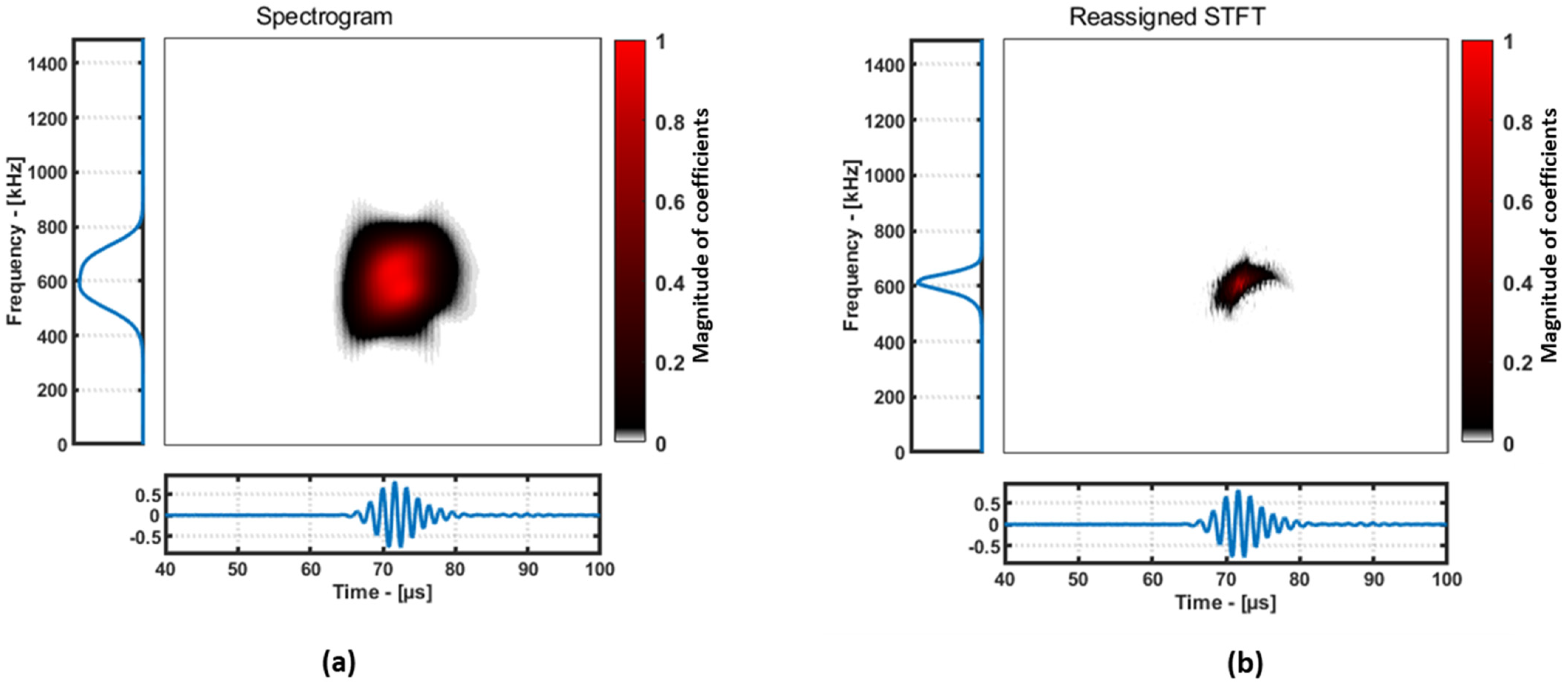
4.3. Reassigned Short-Time Fourier Transform
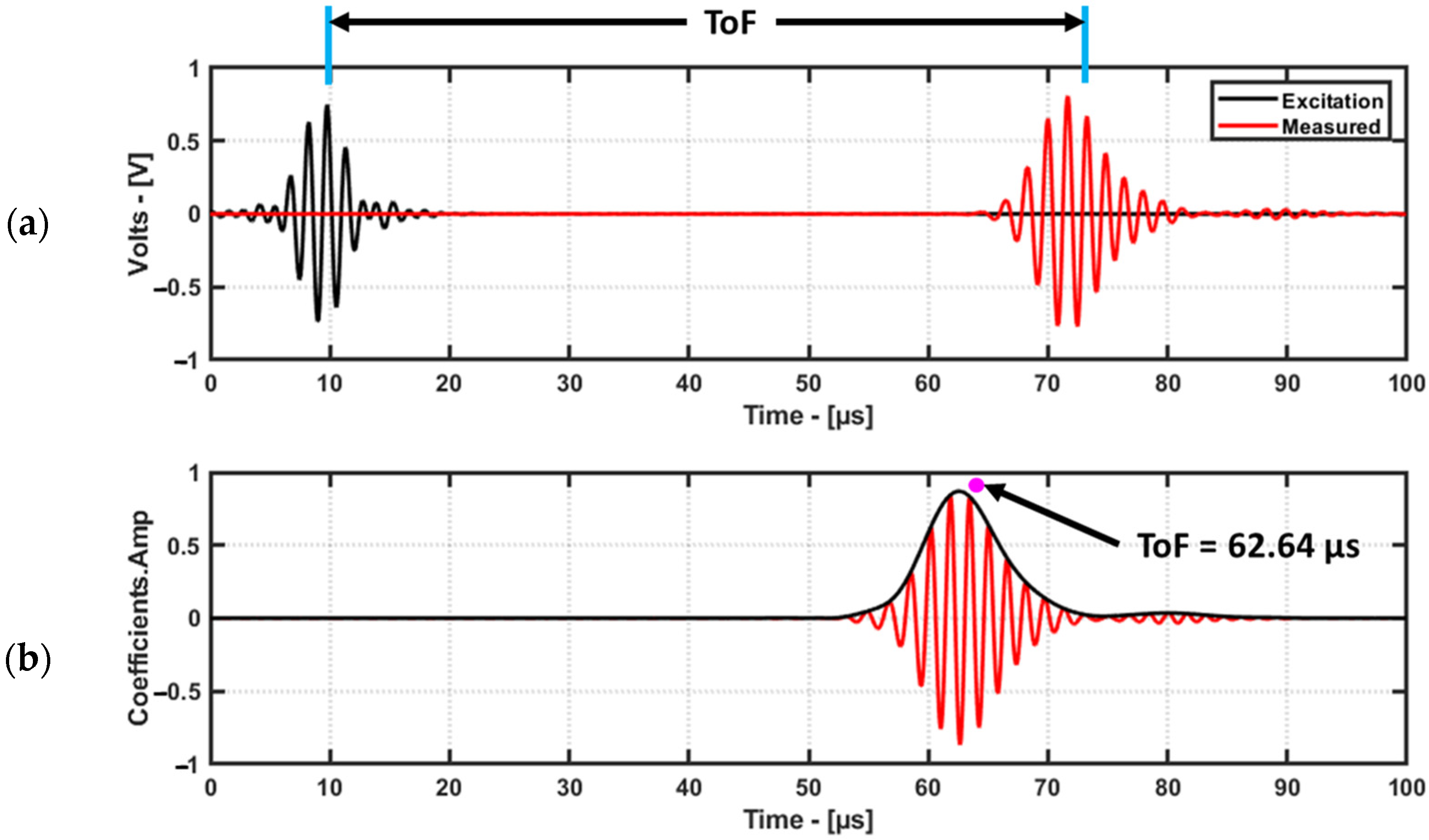
4.4. Time of Flight Using Cross-Correlation
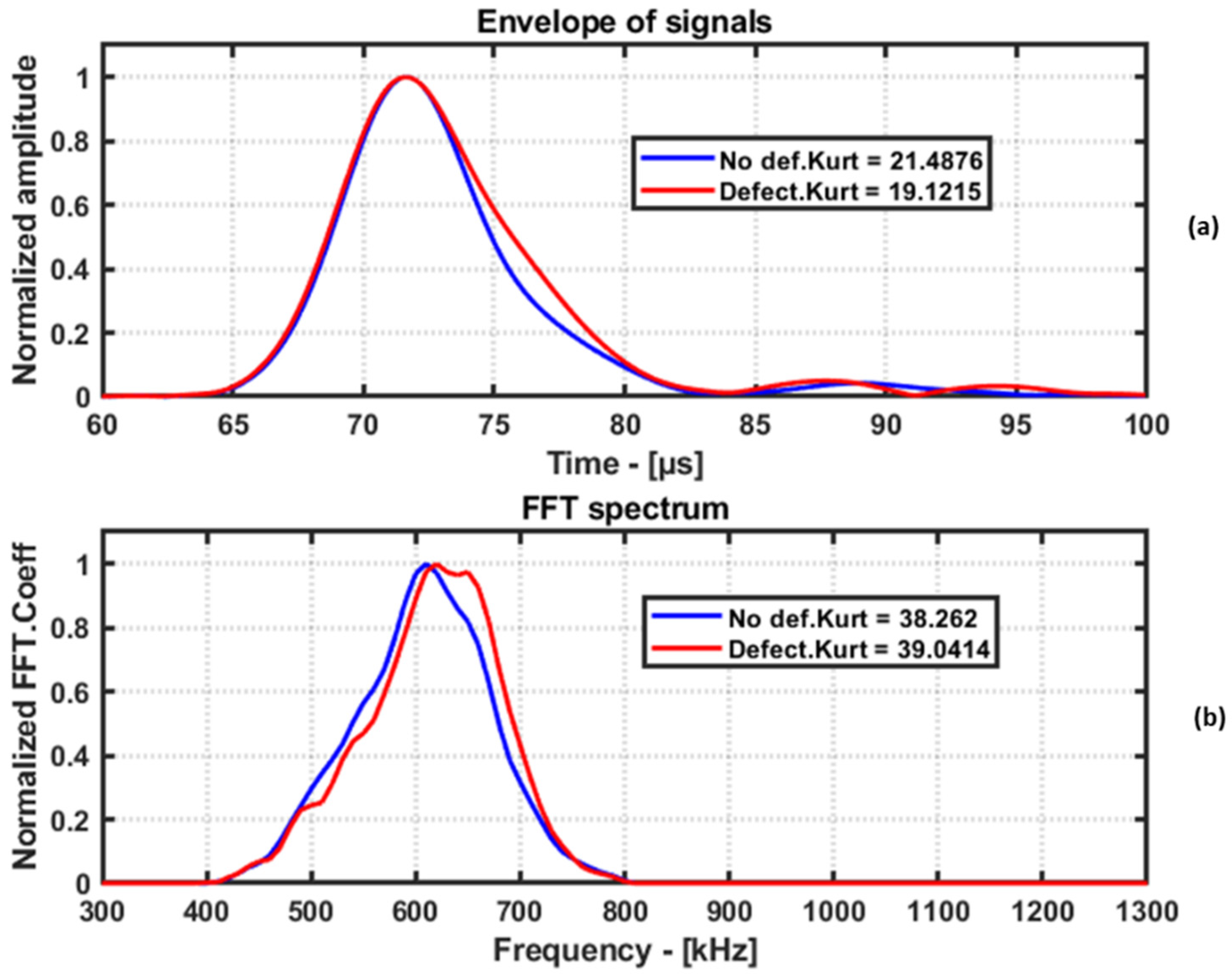
4.5. Kurtosis in Time and Frequency Domains
5. Results
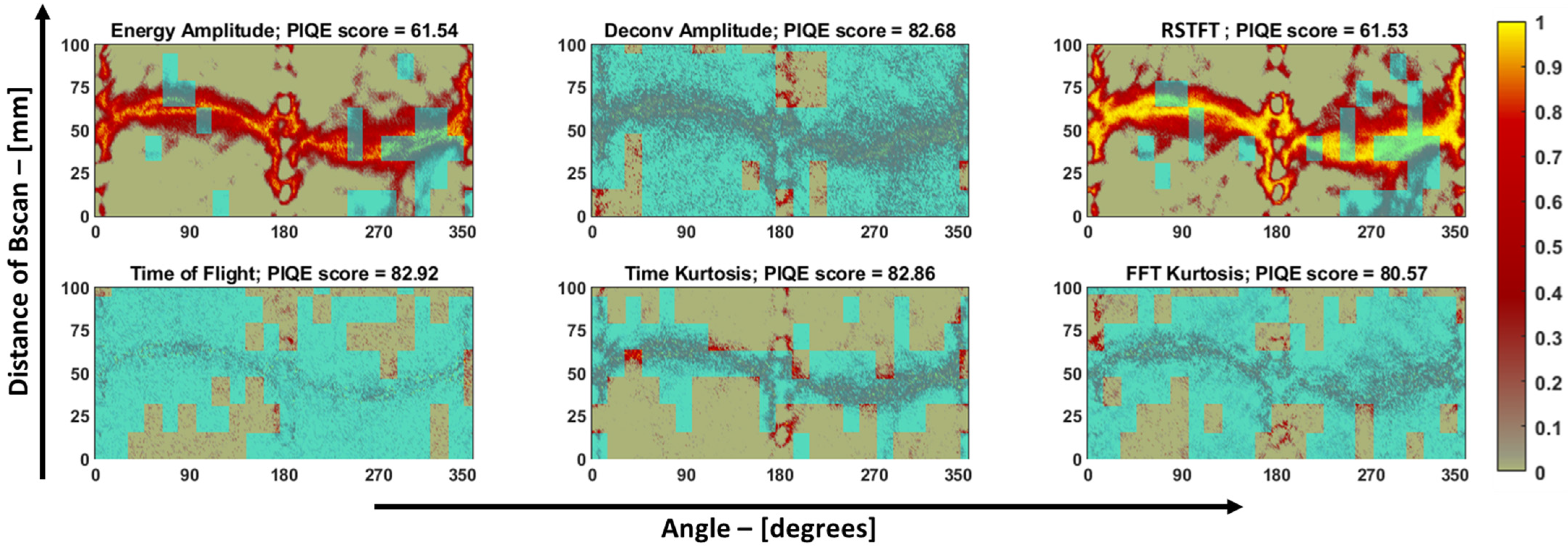
5.1. Sinogram Pre-Processing
5.2. Aluminum Plate
5.2.1. Presentation of the Results
5.2.2. Discussion
5.3. Pultruded GFRP Plate
5.3.1. Display of Results
5.3.2. Discussion
5.4. Laminate GFRP Plate
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Michaels, J.E. Detection, Localization and Characterization of Damage in Plates with an In Situ Array of Spatially Distributed Ultrasonic Sensors. Smart Mater. Struct. 2008, 17, 035035. [Google Scholar] [CrossRef]
- Nokhbatolfoghahai, A.; Navazi, H.M.; Groves, R.M. Evaluation of the Sparse Reconstruction and the Delay-and-Sum Damage Imaging Methods for Structural Health Monitoring under Different Environmental and Operational Conditions. Measurement 2021, 169, 108495. [Google Scholar] [CrossRef]
- Eremin, A.; Glushkov, E.; Glushkova, N.; Lammering, R. Guided Wave Time-Reversal Imaging of Macroscopic Localized Inhomogeneities in Anisotropic Composites. Struct. Health Monit. 2019, 18, 1803–1819. [Google Scholar] [CrossRef]
- Agrahari, J.K.; Kapuria, S. Active Detection of Block Mass and Notch-Type Damages in Metallic Plates Using a Refined Time-Reversed Lamb Wave Technique. Struct. Control Health Monit. 2018, 25, e2064. [Google Scholar] [CrossRef]
- Albiruni, F.; Cho, Y.; Lee, J.H.; Ahn, B.Y. Non-Contact Guided Waves Tomographic Imaging of Plate-like Structures Using a Probabilistic Algorithm. Mater. Trans. 2012, 53, 330–336. [Google Scholar] [CrossRef]
- Wang, S.; Wu, W.; Shen, Y.; Liu, Y.; Jiang, S. Influence of the Pzt Sensor Array Configuration on Lamb Wave Tomography Imaging with the Rapid Algorithm for Hole and Crack Detection. Sensors 2020, 20, 860. [Google Scholar] [CrossRef] [PubMed]
- Herrera, R.H.; Liu, Z.; Raffa, N.; Christensen, P.; Elvers, A. Improving Time Estimation by Blind Deconvolution: With Applications to TOFD and Backscatter Sizing. arXiv 2015, arXiv:1505.08107. [Google Scholar]
- Chapon, A.; Pereira, D.; Toews, M.; Belanger, P. Deconvolution of Ultrasonic Signals Using a Convolutional Neural Network. Ultrasonics 2021, 111, 106312. [Google Scholar] [CrossRef] [PubMed]
- Herrera, R.H.; Orozco, R.; Rodriguez, M. Wavelet-Based Deconvolution of Ultrasonic Signals in Nondestructive Evaluation. J. Zhejiang Univ. Sci. 2006, 7, 1748–1756. [Google Scholar] [CrossRef]
- Honarvar, F.; Sheikhzadeh, H.; Moles, M.; Sinclair, A.N. Improving the Time-Resolution and Signal-to-Noise Ratio of Ultrasonic NDE Signals. Ultrasonics 2004, 41, 755–763. [Google Scholar] [CrossRef]
- Mirahmadi, S.J.; Honarvar, F. Application of Signal Processing Techniques to Ultrasonic Testing of Plates by S0 Lamb Wave Mode. NDT E Int. 2011, 44, 131–137. [Google Scholar] [CrossRef]
- Niethammer, M.; Jacobs, L.J.; Qu, J.; Jarzynski, J. Time-Frequency Representation of Lamb Waves Using the Reassigned Spectrogram. J. Acoust. Soc. Am. 2000, 107, L19–L24. [Google Scholar] [CrossRef] [PubMed]
- Pasadas, D.J.; Barzegar, M.; Ribeiro, A.L.; Ramos, H.G. Guided Lamb Wave Tomography Using Angle Beam Transducers and Inverse Radon Transform for Crack Image Reconstruction. In Proceedings of the Conference Record—IEEE Instrumentation and Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2022. [Google Scholar]
- Asokkumar, A.; Jasiūnienė, E.; Raišutis, R.; Kažys, R.J. Comparison of Ultrasonic Non-contact Air-coupled Techniques for Characterization of Impact-type Defects in Pultruded Gfrp Composites. Materials 2021, 14, 1058. [Google Scholar] [CrossRef] [PubMed]
- Sheen, B.; Cho, Y. A Study on Quantitative Lamb Wave Tomogram via Modified RAPID Algorithm with Shape Factor Optimization. Int. J. Precis. Eng. Manuf. 2012, 13, 671–677. [Google Scholar] [CrossRef]
- Ivan Selesnick Sparse Deconvolution (An MM Algorithm). Available online: https://cnx.org/contents/8nON5rNt@5/Sparse-Deconvolution-An-MM-Algorithm (accessed on 21 December 2021).
- Chang, Y.; Zi, Y.; Zhao, J.; Yang, Z.; He, W.; Sun, H. An Adaptive Sparse Deconvolution Method for Distinguishing the Overlapping Echoes of Ultrasonic Guided Waves for Pipeline Crack Inspection. Meas. Sci. Technol. 2017, 28, 035002. [Google Scholar] [CrossRef]
- Mariia Fedotenkova Spectrogram Reassignment. Available online: https://github.com/mfedoten/reasspectro (accessed on 21 December 2021).
- Xu, B.; Yu, L.; Giurgiutiu, V. Advanced Methods for Time-of-Fiight Estimation with Application to Lamb Wave Structural Health Monitoring. In Structural Health Monitoring 2009: From System Integration to Autonomous Systems, Proceedings of the 7th International Workshop on Structural Health Monitoring, IWSHM 2009, Stanford, CA, USA, 7–9 December 2021; Destech Pubns Inc.: Lancaster, PA, USA, 2021; Volume 2. [Google Scholar]
- Draudviliene, L.; Meskuotiene, A.; Mazeika, L.; Raisutis, R. Assessment of Quantitative and Qualitative Characteristics of Ultrasonic Guided Wave Phase Velocity Measurement Technique. J. Nondestruct. Eval. 2017, 36, 22. [Google Scholar] [CrossRef]
- Venkatanath, N.; Praneeth, D.; Maruthi Chandrasekhar, B.H.; Channappayya, S.S.; Medasani, S.S. Blind Image Quality Evaluation Using Perception Based Features. In Proceedings of the 2015 21st National Conference on Communications, NCC 2015, Mumbai, India, 27 February–1 March 2015. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material and Dimensions | Transducer Used | Elastic Properties | Defect Type and Parameters |
|---|---|---|---|
| Isotropic Aluminum plate of 1050 grade. 500 × 500 × 2 mm3 | Contact-type angle wedge transducer | E = 71 GPa ν = 0.33 ρ = 2705 kg/m3 | Notch-type defect. 40 × 2 × 1 mm3 Orientation: 20° |
| Quasi-isotropic pultruded GFRP plate. 305 × 241 × 3.2 mm3 | Non-contact-type air-coupled transducer | E = 10.5 GPa ν = 0.36 ρ = 1342 kg/m3 | 12 J impact defect. 33 × 10 mm2 |
| Quasi-isotropic laminate GFRP plate. 2000 × 1000 × 4 mm3 | Contact-type Macro Fiber Composite interdigitated transducer | Described in Section 2.3 | Artificial defect. Square-shaped Plexiglass. 100 × 100 mm2 |
| Properties | WRE581T | XE905 | Units |
|---|---|---|---|
| Volume fraction (Vf) | 45 | 46 | % |
| Young’s modulus (E1 = E2) | 20.38 | 21.22 | GPa |
| In-plane shear modulus (G12) | 3.28 | 3.05 | GPa |
| Interlaminar shear modulus (G23) | 2.98 | 3.05 | GPa |
| Poisson’s ratio (ν12 = ν23) | 0.12 | 0.12 | - |
| Density (ρ) | 1778 | 1786 | kg/m3 |
| Ply weight | 881 | 1364 | g/m2 |
| Structural thickness | 0.5 | 0.75 | mm |
| Feature | Notch Width (mm) | Notch Length (mm) | Orientation (Degrees) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Real | Estimate | Abs Error | Real | Estimate | Abs Error | Real | Estimate | Abs Error | |
| Amplitude | 2 | 33.99 | 31.99 | 40 | 40.51 | 0.51 | 20 | 15.7 | 4.3 |
| Deconvolution | 2 | 41.61 | 39.61 | 40 | 45.46 | 5.46 | 20 | 13.8 | 6.2 |
| RSTFT | 2 | 38.49 | 36.49 | 40 | 45.13 | 5.13 | 20 | 14.7 | 5.3 |
| Time of flight | 2 | 25.19 | 23.19 | 40 | 39.8 | 0.2 | 20 | 17 | 3 |
| Time kurtosis | 2 | 21.49 | 19.49 | 40 | 42.86 | 2.86 | 20 | 20.8 | 0.8 |
| Frequency kurtosis | 2 | 27.42 | 25.42 | 40 | 37.85 | 2.15 | 20 | 20.2 | 0.2 |
| Feature | Width (mm) (X Length) | Height (mm) (Y Length) |
|---|---|---|
| Amplitude | 32.53 | 35.49 |
| Deconvolution | 37.28 | 40.71 |
| RSTFT | 39.07 | 43.02 |
| Time of flight | 23.66 | 31.03 |
| Time kurtosis | 23.28 | 28.44 |
| Frequency kurtosis | 30.87 | 33.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asokkumar, A.; Raišutis, R.; Pasadas, D.J.; Samaitis, V.; Mažeika, L. Investigation of Different Features for Baseline-Free RAPID Damage-Imaging Algorithm Using Guided Waves Applied to Metallic and Composite Plates. Materials 2023, 16, 7390. https://doi.org/10.3390/ma16237390
Asokkumar A, Raišutis R, Pasadas DJ, Samaitis V, Mažeika L. Investigation of Different Features for Baseline-Free RAPID Damage-Imaging Algorithm Using Guided Waves Applied to Metallic and Composite Plates. Materials. 2023; 16(23):7390. https://doi.org/10.3390/ma16237390
Chicago/Turabian StyleAsokkumar, Aadhik, Renaldas Raišutis, Dario J. Pasadas, Vykintas Samaitis, and Liudas Mažeika. 2023. "Investigation of Different Features for Baseline-Free RAPID Damage-Imaging Algorithm Using Guided Waves Applied to Metallic and Composite Plates" Materials 16, no. 23: 7390. https://doi.org/10.3390/ma16237390