
Flexible Electrodes as a Measuring System of Electrical Impedance Imaging

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design and Experiment
2.1. Flexible Electrode Structure Design
2.2. Manufacturing Process of Flexible Electrodes
3. Results and Discussion
4. Conclusions
- (1)
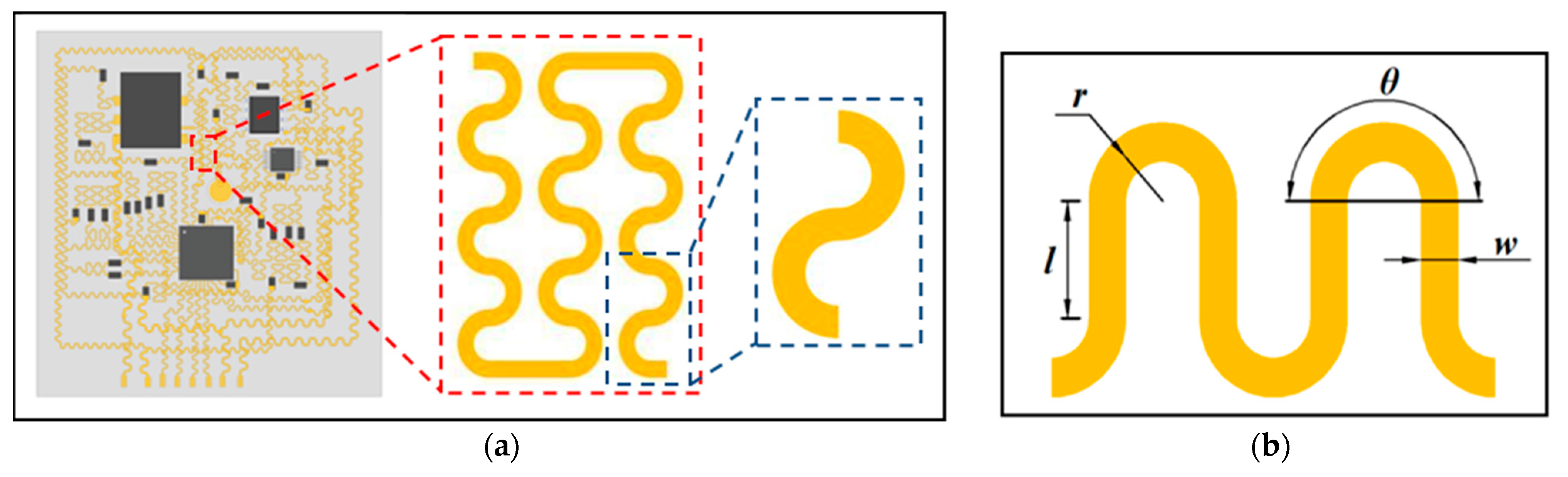
- Serpentine copper wires are used to connect electronic components, and flexible materials are used for packaging and insulating the circuits. This design realizes a system structure with ultra-low modulus and high tensile properties; satisfactory tensile and bending properties and fatigue resistance are obtained, which meet the requirements for practical use.
- (2)
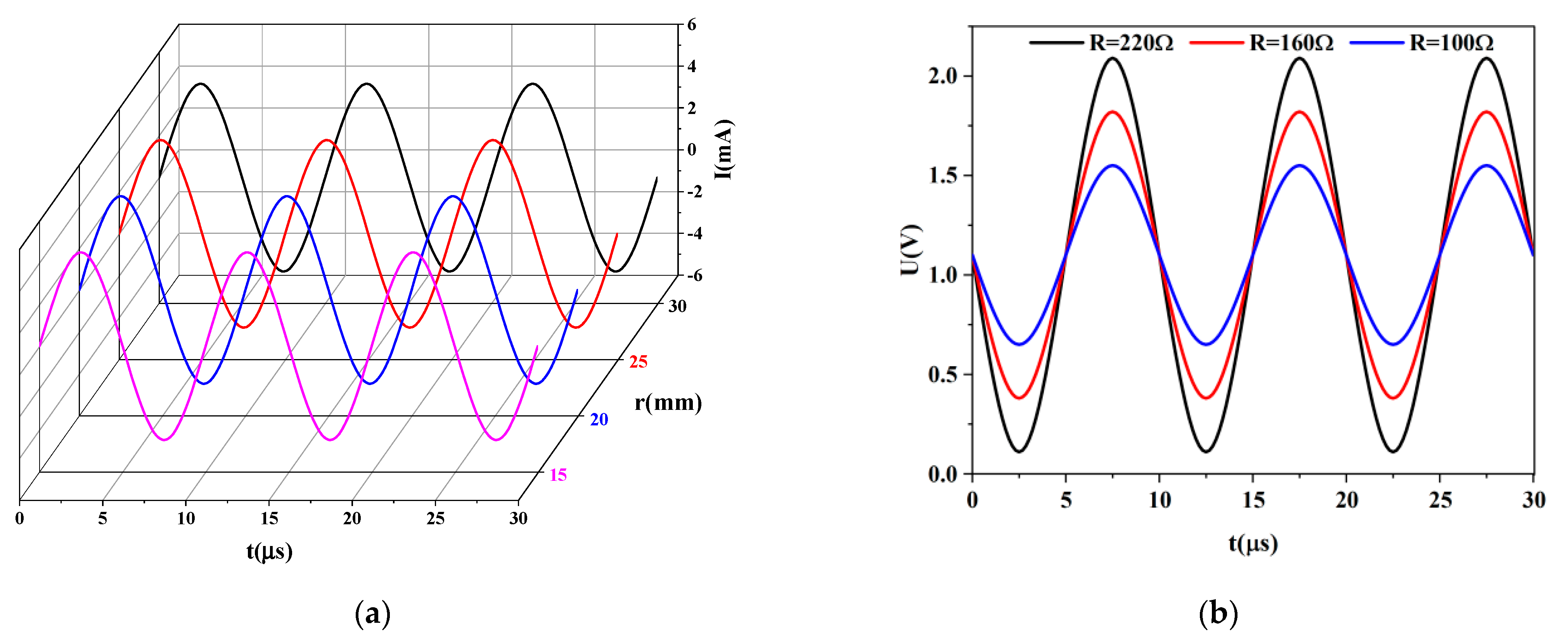
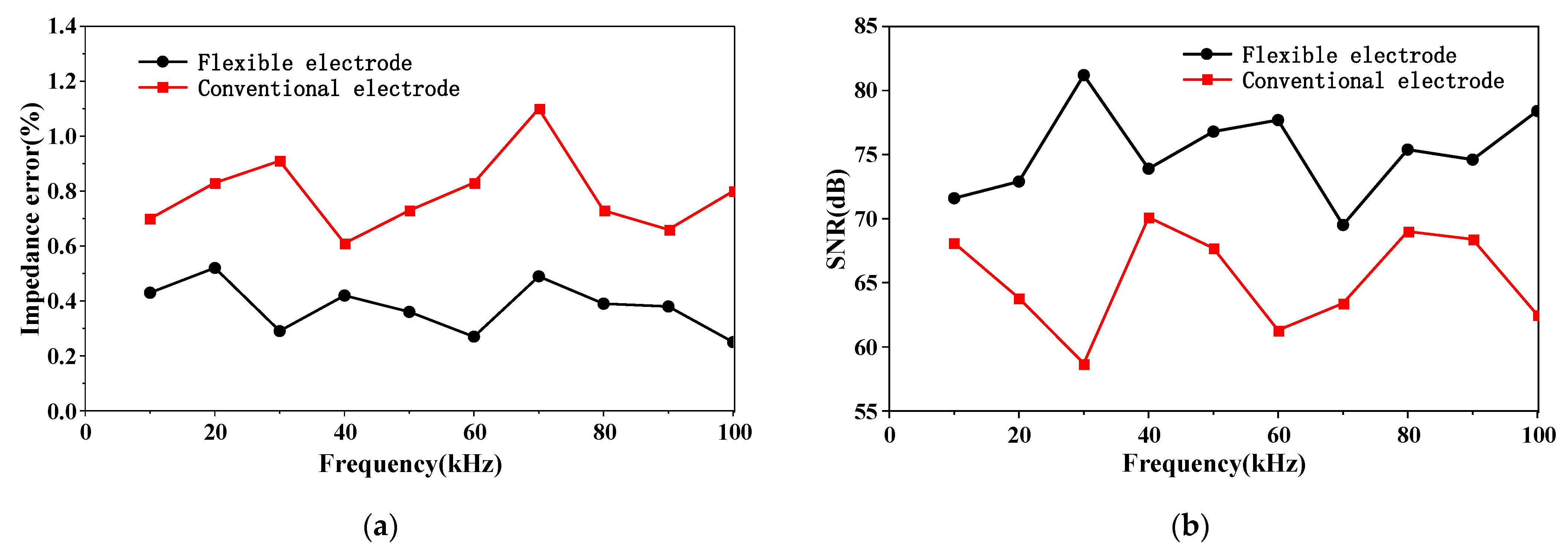
- Experiments on the excitation and measurement functions of flexible electrodes prove that when the device is deformed, the excitation and measured signal of the flexible electrode will not change. Moreover, the experimental data show that flexible electrodes have higher system accuracy and better anti-interference performance than conventional electrodes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kobylianskii, J.; Murray, A.; Brace, D.; Goligher, E.; Fan, E. Electrical impedance tomography in adult patients undergoing mechanical ventilation: A systematic review. J. Crit. Care 2016, 35, 33–50. [Google Scholar] [CrossRef] [PubMed]
- Piraino, T. An Introduction to the Clinical Application and Interpretation of Electrical Impedance Tomography. Respir. Care 2022, 67, 721–729. [Google Scholar] [CrossRef] [PubMed]
- Maciejewski, D.; Putowski, Z.; Czok, M.; Krzych, Ł.J. Electrical impedance tomography as a tool for monitoring mechanical ventilation. An introduction to the technique. Adv. Med. Sci. 2021, 66, 388–395. [Google Scholar] [CrossRef] [PubMed]
- Proença, M.; Braun, F.; Lemay, M.; Solà, J.; Adler, A.; Riedal, T.; Messerli, F.H.; Thiran, J.P.; Rimoldi, S.F.; Rexhaj, E. Non-invasive pulmonary artery pressure estimation by electrical impedance tomography in a controlled hypoxemia study in healthy subjects. Sci. Rep. 2020, 10, 21462. [Google Scholar] [CrossRef] [PubMed]
- Bayford, R.; Polydorides, N. Focus on Recent Advances in Electrical Impedance Tomography. Physiol. Meas. 2019, 40, 100401. [Google Scholar] [CrossRef]
- Capps, M.; Mueller, J. Reconstruction of Organ Boundaries with Deep Learning in the D-bar Method for Electrical Impedance Tomography. IEEE Trans. Biomed. Eng. 2020, 68, 826–833. [Google Scholar] [CrossRef]
- Jauhiainen, J.; Seppänen, A.; Valkonen, T. Mumford–Shah regularization in electrical impedance tomography with complete electrode model. Inverse Probl. 2022, 38, 065004. [Google Scholar] [CrossRef]
- Shi, Y.; Kong, X.; Wang, M.; Fu, F.; Lou, Y. A two-stage image reconstruction strategy for electrical impedance tomography. Trans. Inst. Meas. Control 2021, 43, 3625–3632. [Google Scholar] [CrossRef]
- Khambampati, A.K.; Rahman, S.A.; Sharma, S.K.; Kim, W.Y.; Kim, K.Y. Imaging Conductivity Changes in Monolayer Graphene Using Electrical Impedance Tomography. Micromachines 2020, 11, 1074. [Google Scholar] [CrossRef]
- Padilha, L.J.; Zangl, H. A Review on Electrical Impedance Tomography Spectroscopy. Sensors 2020, 20, 5160. [Google Scholar] [CrossRef]
- Xu, S.; Shi, Y.; Cai, M.; Qi, H.; Wang, Y. Electrical impedance tomography for clinical application. Sci. China Technol. Sci. 2022, 65, 1433–1434. [Google Scholar] [CrossRef]
- Lobo, B.; Hermosa, C.; Abella, A.; Gordo, F. Electrical impedance tomography. Ann. Transl. Med. 2018, 6, 26. [Google Scholar] [CrossRef]
- Nishimura, M. Electrical Impedance Tomography: The Promise of Noninvasive Lung Images at the Bedside. Resp. Care 2020, 65, 402–403. [Google Scholar] [CrossRef]
- Virsilas, E.; Liubsys, A.; Janulionis, A.; Valiulis, A. Electrical impedance tomography in pulmonary edema and hemorrhage. Pediatr. Neonatol. 2022, 63, 424–425. [Google Scholar] [CrossRef]
- Blankman, P.; Hasan, D.; Erik, G.; Gommers, D. Detection of ‘best’ positive end-expiratory pressure derived from electrical impedance tomography parameters during a decremental positive end-expiratory pressure trial. Crit. Care 2014, 18, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Nascimento, M.S.; do Prado, C.; Costa, E.L.V.; Alcala, G.C.; Corrêa, L.C.; Rossi, F.S.; Amato, M.B.P.; Rebello, C.M. Effect of Flow rate on the end-expiratory lung volume in infants with bronchiolitis using high-flow nasal cannula evaluated through electrical impedance tomography. Pediatr. Pulm. 2022, 57, 2681–2687. [Google Scholar] [CrossRef]
- Hovnanian, A.L.D.; Costa, E.L.V.; Hoette, S.; Fernandes, C.J.C.S.; Jardim, C.V.P.; Dias, B.A.; Morinaga, L.T.K.; Amato, M.B.P.; Souza, R. Electrical impedance tomography in pulmonary arterial hypertension. PLoS ONE 2021, 16, e0248214. [Google Scholar] [CrossRef]
- Yuan, S.; He, H.; Long, Y.; Chi, Y.; Frerichs, I.; Zhao, Z. Rapid dynamic bedside assessment of pulmonary perfusion defect by electrical impedance tomography in a patient with acute massive pulmonary embolism. Pulm. Circ. 2021, 11, 2045894020984043. [Google Scholar] [CrossRef]
- Sang, L.; Zhao, Z.; Lin, Z.; Liu, X.; Zhong, N.; Li, Y. A narrative review of electrical impedance tomography in lung diseases with flow limitation and hyperinflation: Methodologies and applications. Ann. Transl. Med. 2020, 8, 1688. [Google Scholar] [CrossRef]
- Karsten, J.; Stueber, T.; Voigt, N.; Teschner, E.; Heinze, H. Influence of different electrode belt positions on electrical impedance tomography imaging of regional ventilation: A prospective observational study. Crit. Care 2015, 20, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Wang, H.; Zhao, B.; Shi, X. Lung Ventilation Functional Monitoring Based on Electrical Impedance Tomography. Trans. Tianjin Univ. 2009, 15, 7–12. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Jia, L.; Mathewson, K.E.; Jang, K.I.; Kim, J.; Fu, H.; Huang, X.; Chava, P.; Wang, R.; et al. Soft microfluidic assemblies of sensors, circuits, and radios for the skin. Science 2014, 344, 70–74. [Google Scholar] [CrossRef] [PubMed]
- Chung, H.U.; Kim, B.H.; Lee, J.Y.; Lee, J.; Xie, Z.; Ibler, E.M.; Lee, K.; Banks, A.; Jeong, J.Y.; Kim, J.; et al. Binodal, wireless epidermal electronic systems with in-sensor analytics for neonatal intensive care. Science 2019, 363, eaau0780. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, L.; Wang, Y.; Zhan, J.; Bai, Y.; Hou, C.; Wu, J.; Huang, R.; Wang, Y.; Huang, Y. Chest-scale self-compensated epidermal electronics for standard 6-precordial-lead ECG. NPJ Flex. Electron. 2022, 6, 29. [Google Scholar] [CrossRef]
- Ben-Yasharand, G.; Ya’akobovitz, A. Electronic Skin with Embedded Carbon Nanotubes Proximity Sensors. IEEE Trans. Electron Devices 2021, 68, 4098–4103. [Google Scholar] [CrossRef]
- Cai, M.; Jiao, Z.; Nie, S.; Wang, C.; Zou, J.; Song, J. A multifunctional electronic skin based on patterned metal films for tactile sensing with a broad linear response range. Sci. Adv. 2021, 7, eabl8313. [Google Scholar] [CrossRef]
- Cho, C.; Choi, H.; Kim, Y.; Park, H.; Kim, D.J.; Kim, D.; Lee, H. Interference-Free, Multimodal Electronic Skin Matrix with Low-Power, Monolithic Integrated Circuits. Adv. Mater. Technol. 2021, 7, 2101020. [Google Scholar] [CrossRef]
- Wang, B. Kirigami electronic eye for shape-adaptive imaging. Matter 2021, 4, 2653–2655. [Google Scholar] [CrossRef]
- Zhang, K.; Jung, Y.H.; Mikael, S.; Seo, J.; Kim, M.; Mi, H.; Zhou, H.; Xia, Z.; Zhou, W.; Gong, S.; et al. Origami silicon optoelectronics for hemispherical electronic eye systems. Nat. Commun. 2017, 8, 1782. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Liu, K.; Liu, Y.; Guo, Y.; Liu, Y. Intrinsically flexible displays: Key materials and devices. Natl. Sci. Rev. 2022, 9, nwac090. [Google Scholar] [CrossRef]
- Kwon, S.H.; Dong, L. Flexible sensors and machine learning for heart monitoring. Nano Energy 2022, 102, 107632. [Google Scholar] [CrossRef]
- Senthil, C.; Kim, S.S.; Jung, H.Y. Flame retardant high-power Li-S flexible batteries enabled by bio-macromolecular binder integrating conformal fractions. Nat. Commun. 2022, 13, 145. [Google Scholar] [CrossRef]
- Wang, D.; Sun, J.; Xue, Q.; Li, Q.; Guo, Y.; Zhao, Y.; Chen, Z.; Huang, Z.; Yang, Q.; Liang, G.; et al. A universal method towards conductive textile for flexible batteries with superior softness. Energy Storage Mater. 2021, 36, 272–278. [Google Scholar] [CrossRef]
- Xue, Z.; Song, H.; Rogers, J.A.; Zhang, Y.; Huang, Y. Mechanically-Guided Structural Designs in Stretchable Inorganic Electronics. Adv. Mater. 2020, 32, e1902254. [Google Scholar] [CrossRef]
- Zhou, Y.D.; Fei, Q.G. Evaluating deformation modes of sandwich serpentine structures for high stretchability. Thin Wall. Struct. 2020, 157, 107087. [Google Scholar] [CrossRef]
- Pan, T.; Pharr, M.; Ma, Y.; Ning, R.; Yan, Z.; Xu, R.; Feng, X.; Huang, Y.; Rogers, J.A. Experimental and theoretical studies of serpentine interconnects on ultrathin elastomers for stretchable electronics. Adv. Funct. Mater. 2017, 27, 1702589. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Li, X.; Fan, J.A.; Xu, S.; Song, Y.M.; Choi, K.; Yeo, W.; Lee, W.; Nazaar, S.N.; et al. Experimental and theoretical studies of serpentine microstructures bonded to prestrained elastomers for stretchable electronics. Adv. Funct. Mater. 2014, 24, 2028–2037. [Google Scholar] [CrossRef]
- Liu, H.; Xue, R.; Hu, J.; Ping, X.; Wu, H.; Huang, M.; Zhang, H.; Guo, X.; Li, R.; Chen, Y.; et al. Systematic study on the mechanical and electric behaviors of the nonbuckling interconnect design of stretchable electronics. Sci. China Phys. Mech. 2018, 61, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Qin, S.; Yao, Y.; Xu, Y.; Xu, D.; Gao, Y.; Xing, S.; Li, Z. Characteristics and topic trends on electrical impedance tomography hardware publications. Front. Physiol. 2022, 13, 1011941. [Google Scholar] [CrossRef]
- Lu, N.; Yang, S. Mechanics for stretchable sensors. Curr. Opin. Solid State Mater. Sci. 2015, 19, 149–159. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, E.; Li, A.; Cui, C.; Guo, R.; Tang, H.; Xiao, H.; Zhou, M.; Qin, W.; Wang, X.; et al. A porous self-healing hydrogel with an island-bridge structure for strain and pressure sensors. J. Mater. Chem. B 2020, 9, 719–730. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Mechael, S.S.; Chen, Y.; Carmichael, T.B. Velour Fabric as an Island-Bridge Architectural Design for Stretchable Textile-Based Lithium-ion Battery Electrodes. ACS Appl. Mater. Interfaces 2020, 12, 51679–51687. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, Y.; Cho, J.; Lee, J.; Huang, X.; Jia, L.; Fan, J.A.; Su, Y.; Su, J.; Zhang, H.; et al. Stretchable batteries with self-similar serpentine interconnects and integrated wireless recharging systems. Nat. Commun. 2013, 4, 1543. [Google Scholar] [CrossRef] [PubMed] [Green Version]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Ping, X.; Chen, X.; Wang, D. Flexible Electrodes as a Measuring System of Electrical Impedance Imaging. Materials 2023, 16, 1901. https://doi.org/10.3390/ma16051901
Wang Y, Ping X, Chen X, Wang D. Flexible Electrodes as a Measuring System of Electrical Impedance Imaging. Materials. 2023; 16(5):1901. https://doi.org/10.3390/ma16051901
Chicago/Turabian StyleWang, Yi, Xuecheng Ping, Xiaoyan Chen, and Di Wang. 2023. "Flexible Electrodes as a Measuring System of Electrical Impedance Imaging" Materials 16, no. 5: 1901. https://doi.org/10.3390/ma16051901