

Shear Thickening Fluid and Sponge-Hybrid Triboelectric Nanogenerator for a Motion Sensor Array-Based Lying State Detection System




Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Demonstrating the Lying State Detection System
2.3. Materials Characterization
2.4. Output Measurement
2.5. Simulation
3. Results and Discussion
3.1. Preparation of the SSH-TENG
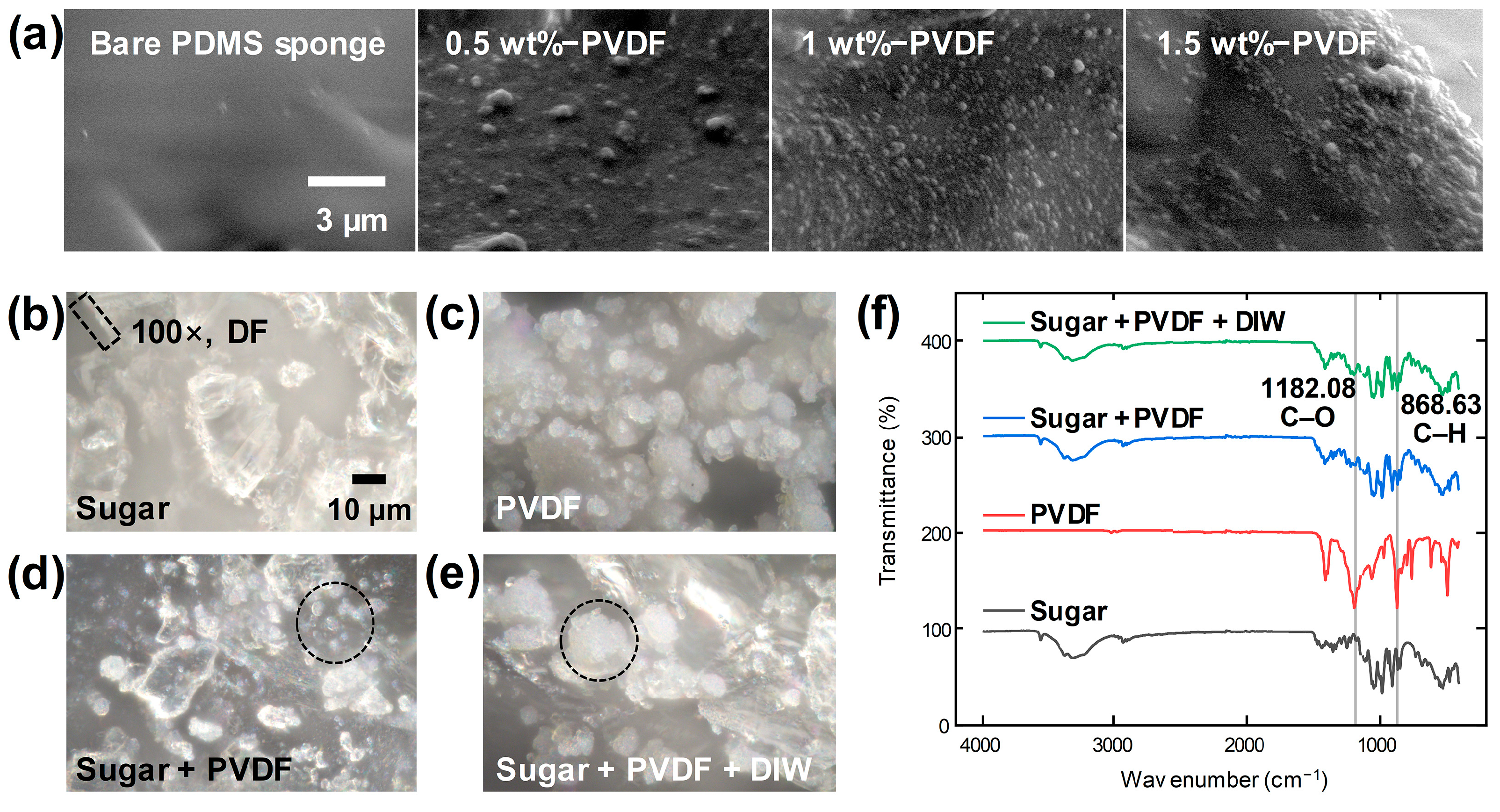
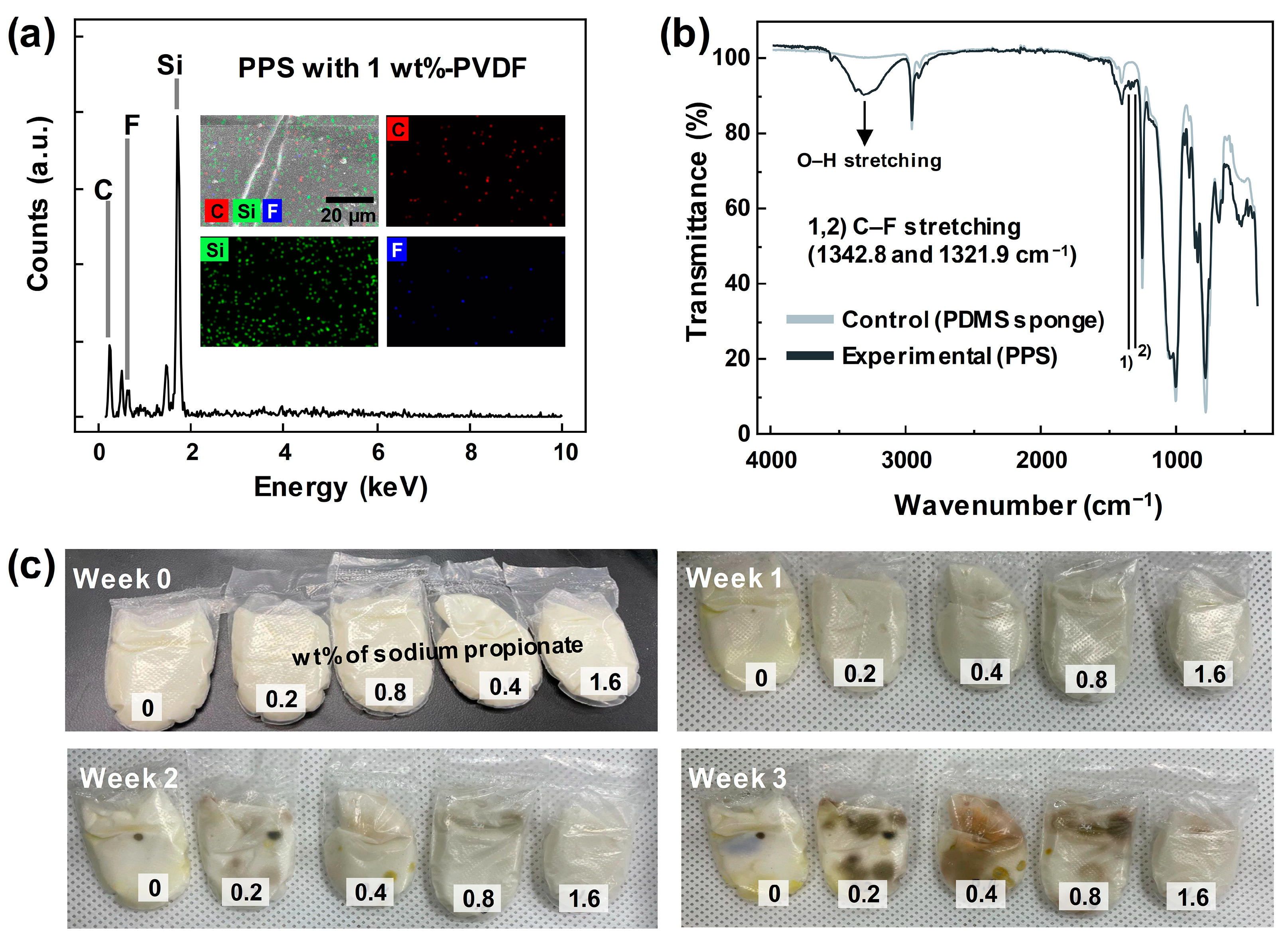
3.2. Analysis of the Material Properties
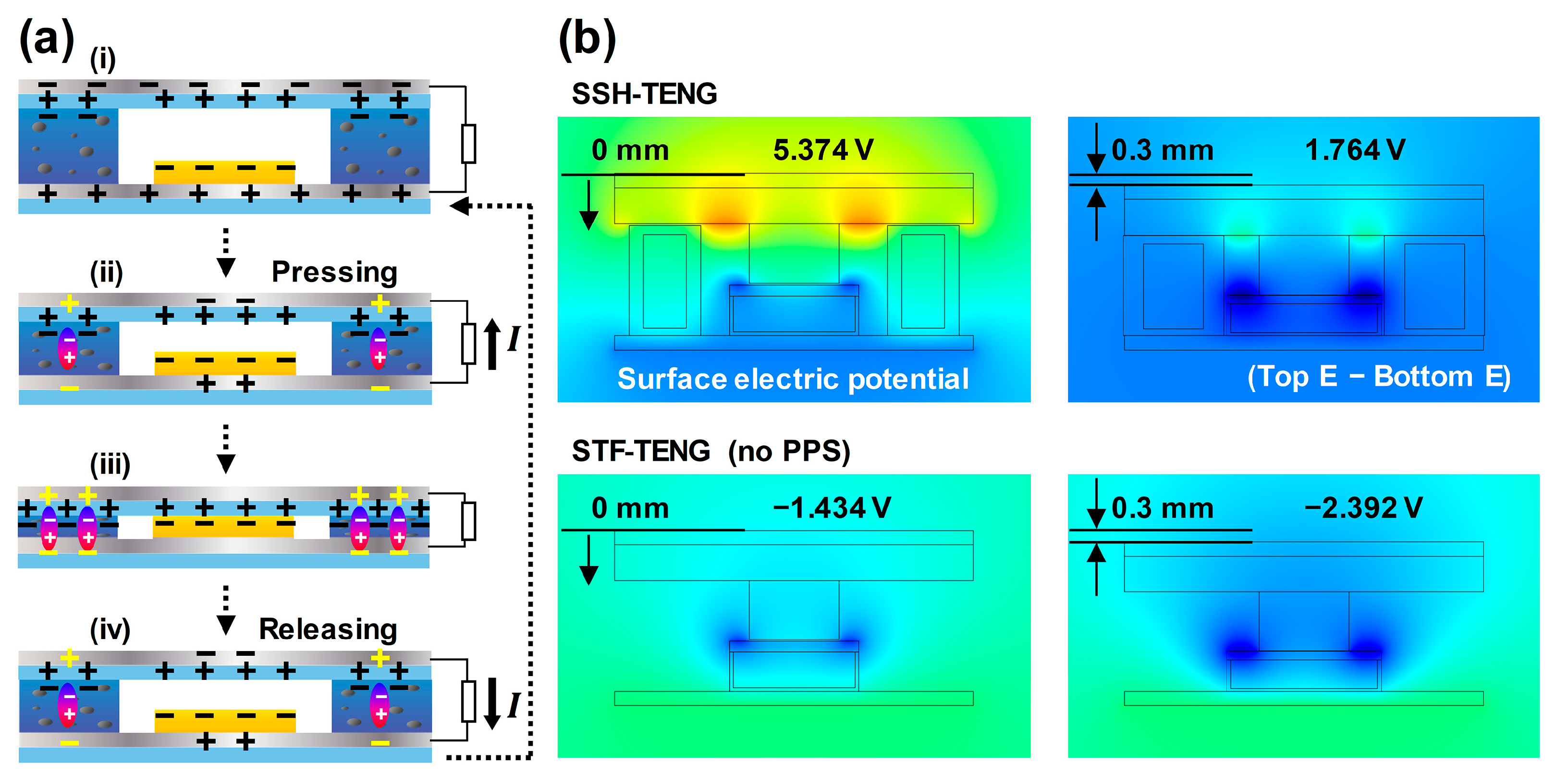
3.3. Working Principle and Simulation Results of SSH-TENG
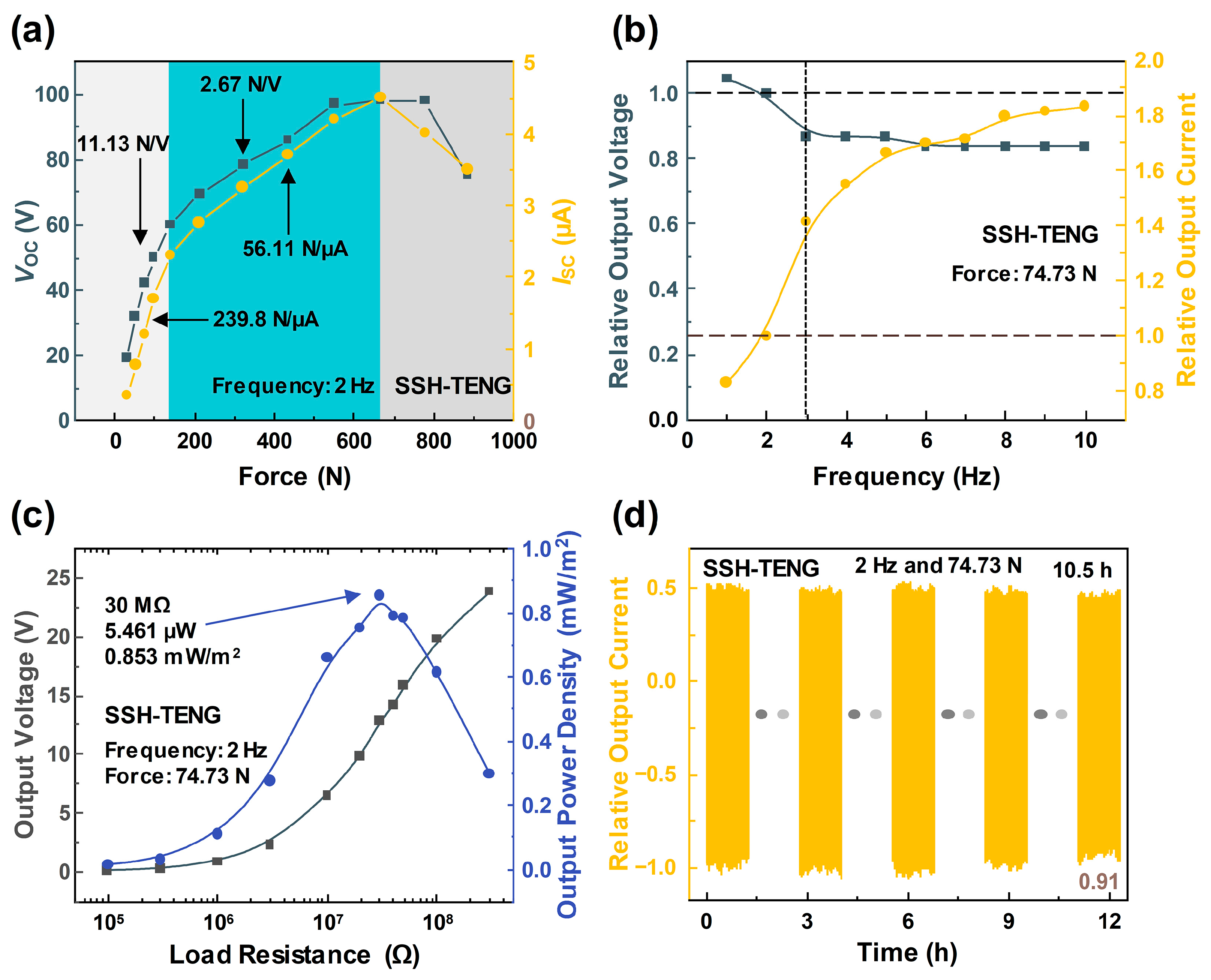
3.4. Electrical Output Optimization for SSH-TENG
3.5. Advanced Electrical Output Characterization of SSH-TENG
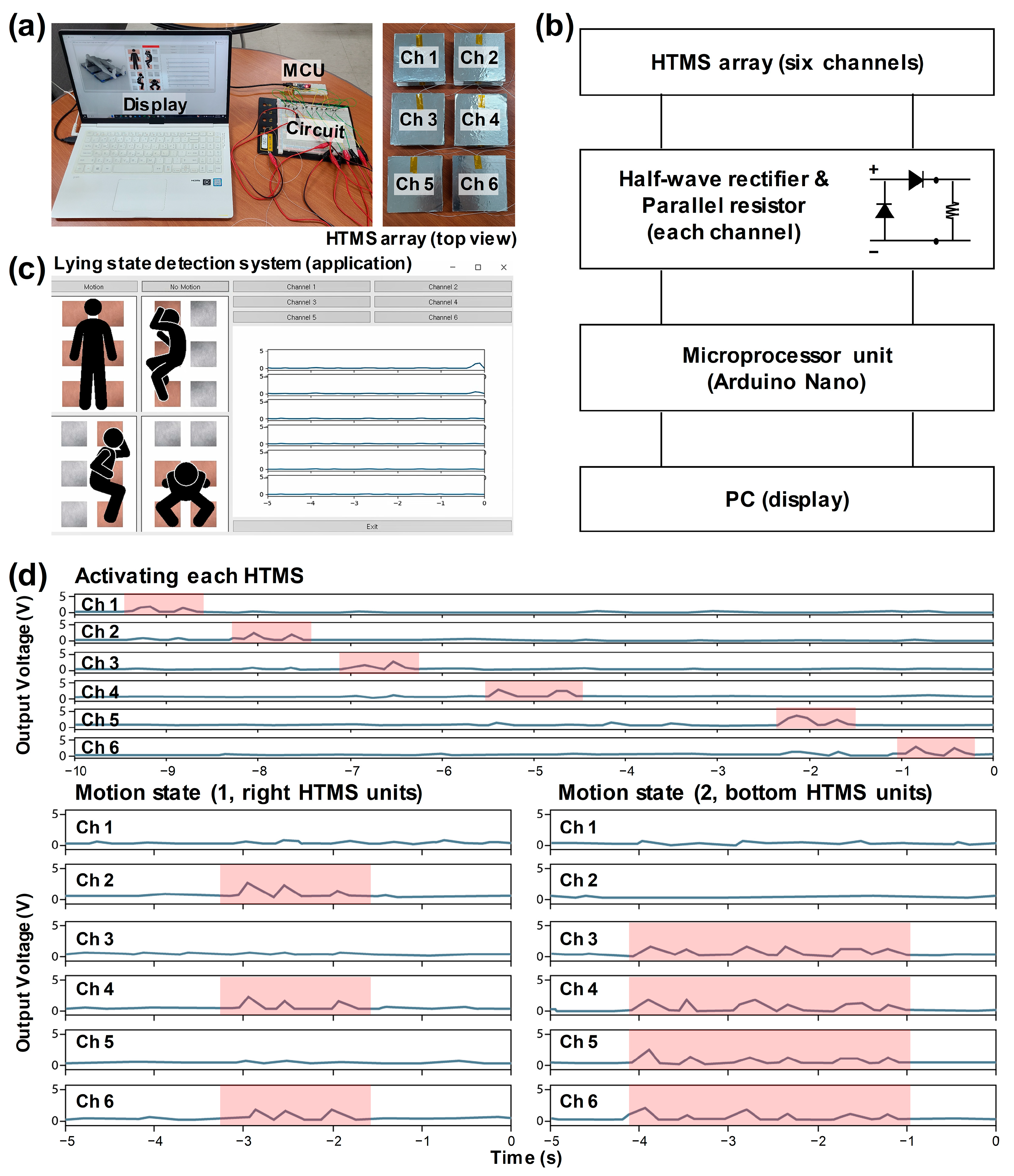
3.6. Demonstration of the Lying State Detection System with an HTMS Array
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gong, J.; Caldas, C.H. Computer Vision-Based Video Interpretation Model for Automated Productivity Analysis of Construction Operations. J. Comput. Civ. Eng. 2010, 24, 252–263. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.; Castedo, L. Towards the Internet of Smart Trains: A Review on Industrial IoT-Connected Railways. Sensors 2017, 17, 1457. [Google Scholar] [CrossRef]
- Kim, D.; Liu, M.; Lee, S.; Kamat, V.R. Remote Proximity Monitoring between Mobile Construction Resources Using Camera-Mounted UAVs. Autom. Constr. 2019, 99, 168–182. [Google Scholar] [CrossRef]
- Seo, J.; Han, S.; Lee, S.; Kim, H. Computer Vision Techniques for Construction Safety and Health Monitoring. Adv. Eng. Inform. 2015, 29, 239–251. [Google Scholar] [CrossRef]
- Yu, S.; Chai, Y.; Samtani, S.; Liu, H.; Chen, H. Motion Sensor–Based Fall Prevention for Senior Care: A Hidden Markov Model with Generative Adversarial Network Approach. Inf. Syst. Res. 2024, 35, 1–15. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Wang, Z.L. Flexible Triboelectric Generator! Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Chen, S.W.; Cao, X.; Wang, N.; Ma, L.; Zhu, H.R.; Willander, M.; Jie, Y.; Wang, Z.L. An Ultrathin Flexible Single-Electrode Triboelectric-Nanogenerator for Mechanical Energy Harvesting and Instantaneous Force Sensing. Adv. Energy Mater. 2017, 7, 1601255. [Google Scholar] [CrossRef]
- Jeon, S.-B.; Nho, Y.-H.; Park, S.-J.; Kim, W.-G.; Tcho, I.-W.; Kim, D.; Kwon, D.-S.; Choi, Y.-K. Self-Powered Fall Detection System Using Pressure Sensing Triboelectric Nanogenerators. Nano Energy 2017, 41, 139–147. [Google Scholar] [CrossRef]
- Ren, Z.; Nie, J.; Shao, J.; Lai, Q.; Wang, L.; Chen, J.; Chen, X.; Wang, Z.L. Fully Elastic and Metal-Free Tactile Sensors for Detecting Both Normal and Tangential Forces Based on Triboelectric Nanogenerators. Adv. Funct. Mater. 2018, 28, 1802989. [Google Scholar] [CrossRef]
- Aminullah; Kasi, A.K.; Kasi, J.K.; Uddin, M.; Bokhari, M. Triboelectric Nanogenerator as Self-Powered Impact Force Sensor for Falling Object. Curr. Appl. Phys. 2020, 20, 137–144. [Google Scholar] [CrossRef]
- Parandeh, S.; Kharaziha, M.; Karimzadeh, F. An Eco-Friendly Triboelectric Hybrid Nanogenerators Based on Graphene Oxide Incorporated Polycaprolactone Fibers and Cellulose Paper. Nano Energy 2019, 59, 412–421. [Google Scholar] [CrossRef]
- Haider, Z.; Haleem, A.; Ahmad, R.u.S.; Farooq, U.; Shi, L.; Claver, U.P.; Memon, K.; Fareed, A.; Khan, I.; Mbogba, M.K.; et al. Highly Porous Polymer Cryogel Based Tribopositive Material for High Performance Triboelectric Nanogenerators. Nano Energy 2020, 68, 104294. [Google Scholar] [CrossRef]
- Gajula, P.; Muhammad, F.M.; Reza, M.S.; Jaisankar, S.N.; Kim, K.J.; Kim, H. Fabrication of a Silicon Elastomer-Based Self-Powered Flexible Triboelectric Sensor for Wearable Energy Harvesting and Biomedical Applications. ACS Appl. Electron. Mater. 2023, 5, 1750–1760. [Google Scholar] [CrossRef]
- An, Z.; Wu, Z.; Hu, Y.; Han, C.; Cao, Z.; Zhou, H.; Chen, Y. A Miniaturized Array Microneedle Tactile Sensor for Intelligent Object Recognition. Nano Energy 2024, 125, 109567. [Google Scholar] [CrossRef]
- Ge, Y.; Peng, L.; Cao, X.; Wang, N. Triboelectrically Active Hydrogel Drives Self-Charging Zinc-Ion Battery and Human Motion Sensing. Nano Energy 2024, 126, 109601. [Google Scholar] [CrossRef]
- Lei, T.; Wang, Y.; Zhang, Q.; Wang, H.; Duan, X.; Yan, J.; Xia, Z.; Wang, R.; Shou, W.; Li, X.; et al. Ultra-Stretchable and Anti-Freezing Ionic Conductive Hydrogels as High Performance Strain Sensors and Flexible Triboelectric Nanogenerator in Extreme Environments. Nano Energy 2024, 126, 109633. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric Nanogenerators as New Energy Technology for Self-Powered Systems and as Active Mechanical and Chemical Sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef]
- Wang, S.; Liu, S.; Zhou, J.; Li, F.; Li, J.; Cao, X.; Li, Z.; Zhang, J.; Li, B.; Wang, Y.; et al. Advanced Triboelectric Nanogenerator with Multi-Mode Energy Harvesting and Anti-Impact Properties for Smart Glove and Wearable e-Textile. Nano Energy 2020, 78, 105291. [Google Scholar] [CrossRef]
- Yuan, F.; Liu, S.; Zhou, J.; Fan, X.; Wang, S.; Gong, X. A Smart Kevlar-Based Triboelectric Nanogenerator with Enhanced Anti-Impact and Self-Powered Sensing Properties. Smart Mater. Struct. 2020, 29, 125007. [Google Scholar] [CrossRef]
- Wang, W.; Zhou, J.; Wang, S.; Yuan, F.; Liu, S.; Zhang, J.; Gong, X. Enhanced Kevlar-Based Triboelectric Nanogenerator with Anti-Impact and Sensing Performance towards Wireless Alarm System. Nano Energy 2022, 91, 106657. [Google Scholar] [CrossRef]
- Kim, Y.; Yun, J.; Kim, D. Robust and Flexible Triboelectric Nanogenerator Using Non-Newtonian Fluid Characteristics towards Smart Traffic and Human-Motion Detecting System. Nano Energy 2022, 98, 107246. [Google Scholar] [CrossRef]
- Yun, S.-Y.; Tcho, I.-W.; Kim, W.-G.; Kim, D.-W.; Son, J.-H.; Lee, S.-W.; Choi, Y.-K. Mechanically Robust Triboelectric Nanogenerator with a Shear Thickening Fluid for Impact Monitoring. J. Mater. Chem. A 2022, 10, 10383–10390. [Google Scholar] [CrossRef]
- Shang, L.; Wu, Z.; Li, X.; Xu, A.; Miao, Y.; Xu, W.; Tang, W.; Fu, C.; Su, B.; Dong, K.; et al. A Breathable and Highly Impact-Resistant Shear-Thickened Fluid (STF) Based TENG via Hierarchical Liquid-Flow Spinning for Intelligent Protection. Nano Energy 2023, 118, 108955. [Google Scholar] [CrossRef]
- Park, J.G.; Kim, B.; Song, J.Y.; Lee, H.K.; Kim, M.C.; Hyun, K.; Shin, D.S.; Lin, Z.-H.; Choi, D.; Park, S.M. Shear Thickening and Charge-Storing Interlayer-Based All-Aerosol-Sprayed Wearable Triboelectric Sensor for Industrial Wireless Human-Machine Interfaces. Nano Energy 2024, 124, 109444. [Google Scholar] [CrossRef]
- Lennox, J.E.; McElroy, L.J. Inhibition of Growth and Patulin Synthesis in Penicillium Expansum by Potassium Sorbate and Sodium Propionate in Culture. Appl. Environ. Microbiol. 1984, 48, 1031–1033. [Google Scholar] [CrossRef] [PubMed]
- Kingwascharapong, P.; Tanaka, F.; Koga, A.; Karnjanapratum, S.; Tanaka, F. Effect of Sodium Propionate on Inhibition of Botrytis Cinerea (in Vitro) and a Predictive Model Based on Monte Carlo Simulation. Food Sci. Technol. Res. 2022, 28, 285–295. [Google Scholar] [CrossRef]
- Zhu, M.; Huang, Y.; Ng, W.S.; Liu, J.; Wang, Z.; Wang, Z.; Hu, H.; Zhi, C. 3D Spacer Fabric Based Multifunctional Triboelectric Nanogenerator with Great Feasibility for Mechanized Large-Scale Production. Nano Energy 2016, 27, 439–446. [Google Scholar] [CrossRef]
- Zhong, W.; Xu, B.; Gao, Y. Engraved Pattern Spacer Triboelectric Nanogenerators for Mechanical Energy Harvesting. Nano Energy 2022, 92, 106782. [Google Scholar] [CrossRef]
- Li, Z.; Jin, G.; Ma, Y.; Zhou, X.; Gao, Y.; Xiong, X.; Dong, K.; Lyu, L. Preparation and Performance of 3-D Woven Triboelectric Nanogenerators with Integrated Friction and Spacer Layers. Compos. Struct. 2023, 322, 117430. [Google Scholar] [CrossRef]
- Chen, H.; Lu, Q.; Cao, X.; Wang, N.; Wang, Z.L. Natural Polymers Based Triboelectric Nanogenerator for Harvesting Biomechanical Energy and Monitoring Human Motion. Nano Res. 2022, 15, 2505–2511. [Google Scholar] [CrossRef]
- Zhang, Z.; Jie, Y.; Zhu, J.; Zhu, Z.; Chen, H.; Lu, Q.; Zeng, Y.; Cao, X.; Wang, N.; Wang, Z. Paper Triboelectric Nanogenerator Designed for Continuous Reuse and Quick Construction. Nano Res. 2022, 15, 1109–1114. [Google Scholar] [CrossRef]
- Yu, J.; Xian, S.; Zhang, Z.; Hou, X.; He, J.; Mu, J.; Geng, W.; Qiao, X.; Zhang, L.; Chou, X. Synergistic Piezoelectricity Enhanced BaTiO3/Polyacrylonitrile Elastomer-Based Highly Sensitive Pressure Sensor for Intelligent Sensing and Posture Recognition Applications. Nano Res. 2023, 16, 5490–5502. [Google Scholar] [CrossRef]
- Yu, J.; Xian, S.; Mu, J.; Wang, M.; Wang, Y.; Hou, X.; Zhang, L.; He, J.; Mu, J.; Chou, X. Hybrid Electromechanical Properties of Hetero-Doped and Homogeneously Bonded Dual-Mode Pressure Sensor for Indoor Body Area Network Node. Sci. China Inf. Sci. 2024, 67, 112401. [Google Scholar] [CrossRef]
- Kim, D.; Park, S.; Jeon, S.; Seol, M.; Choi, Y. A Triboelectric Sponge Fabricated from a Cube Sugar Template by 3D Soft Lithography for Superhydrophobicity and Elasticity. Adv. Electron. Mater. 2016, 2, 1500331. [Google Scholar] [CrossRef]
- Kou, H.; Wang, H.; Cheng, R.; Liao, Y.; Shi, X.; Luo, J.; Li, D.; Wang, Z.L. Smart Pillow Based on Flexible and Breathable Triboelectric Nanogenerator Arrays for Head Movement Monitoring during Sleep. ACS Appl. Mater. Interfaces 2022, 14, 23998–24007. [Google Scholar] [CrossRef] [PubMed]
- Pakawanit, P.; Pharino, U.; Charoonsuk, T.; Sriphan, S.; Pongampai, S.; Vittayakorn, N. Simple Fabrication of Porous 3D Substrate Polydimethylsiloxane (PDMS) Composited with Polyvinylidene Fluoride-Co-Hexafluoropropylene (PVDF-HFP) for Triboelectric Nanogenerator. Integr. Ferroelectr. 2022, 222, 1–13. [Google Scholar] [CrossRef]
- Niu, S.; Wang, S.; Lin, L.; Liu, Y.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theoretical Study of Contact-Mode Triboelectric Nanogenerators as an Effective Power Source. Energy Environ. Sci. 2013, 6, 3576–3583. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Kim, I.; Im, M.; Kim, D. Shear Thickening Fluid and Sponge-Hybrid Triboelectric Nanogenerator for a Motion Sensor Array-Based Lying State Detection System. Materials 2024, 17, 3536. https://doi.org/10.3390/ma17143536
Kim Y, Kim I, Im M, Kim D. Shear Thickening Fluid and Sponge-Hybrid Triboelectric Nanogenerator for a Motion Sensor Array-Based Lying State Detection System. Materials. 2024; 17(14):3536. https://doi.org/10.3390/ma17143536
Chicago/Turabian StyleKim, Youngsu, Inkyum Kim, Maesoon Im, and Daewon Kim. 2024. "Shear Thickening Fluid and Sponge-Hybrid Triboelectric Nanogenerator for a Motion Sensor Array-Based Lying State Detection System" Materials 17, no. 14: 3536. https://doi.org/10.3390/ma17143536
APA StyleKim, Y., Kim, I., Im, M., & Kim, D. (2024). Shear Thickening Fluid and Sponge-Hybrid Triboelectric Nanogenerator for a Motion Sensor Array-Based Lying State Detection System. Materials, 17(14), 3536. https://doi.org/10.3390/ma17143536