
Iron Loss and Temperature Rise Analysis of a Transformer Core Considering Vector Magnetic Hysteresis Characteristics under Direct Current Bias

Abstract
:1. Introduction
2. The Measurement of Rotating Magnetic Properties
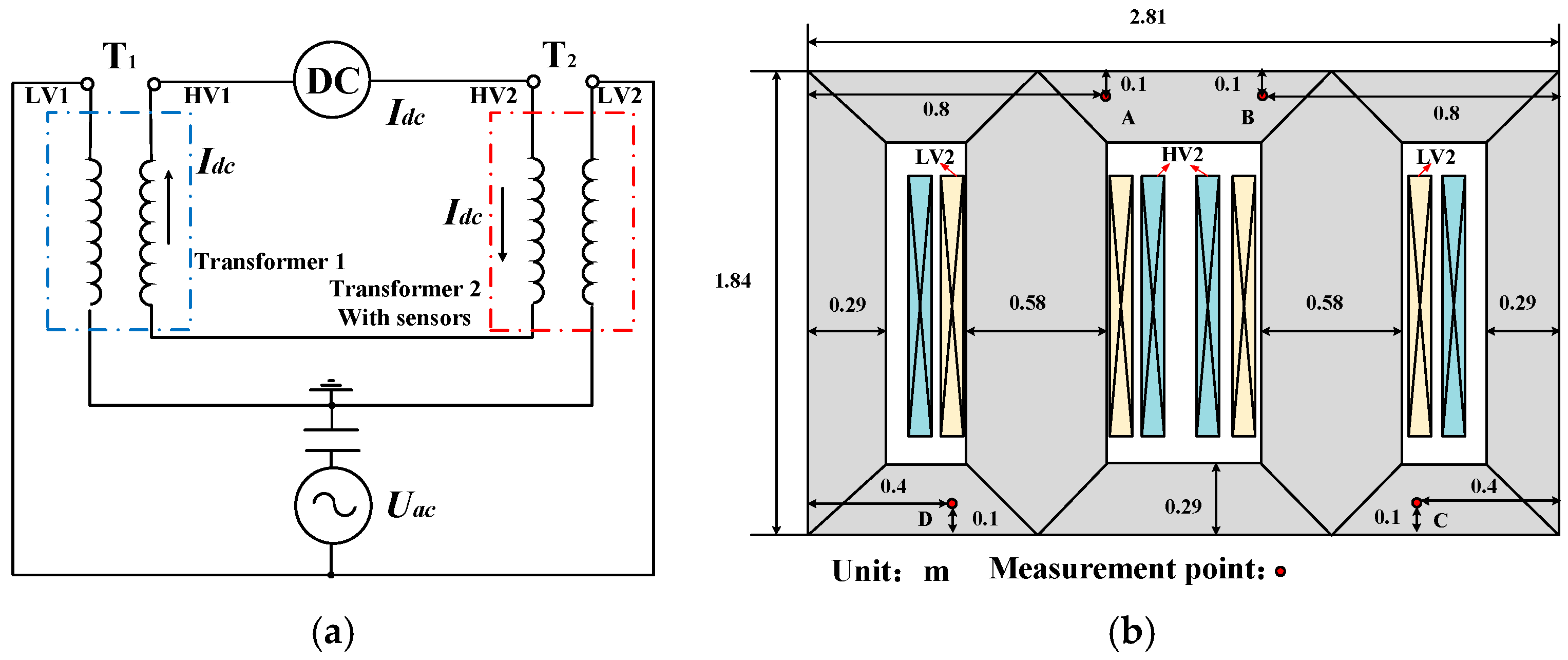
2.1. The Measurement Setup
2.2. The Measured Magnetic Properties of 30ZH120
2.3. The Measured Iron Loss
3. Enhanced Dynamic Vector Hysteresis Model and Corresponding FEM Calculation
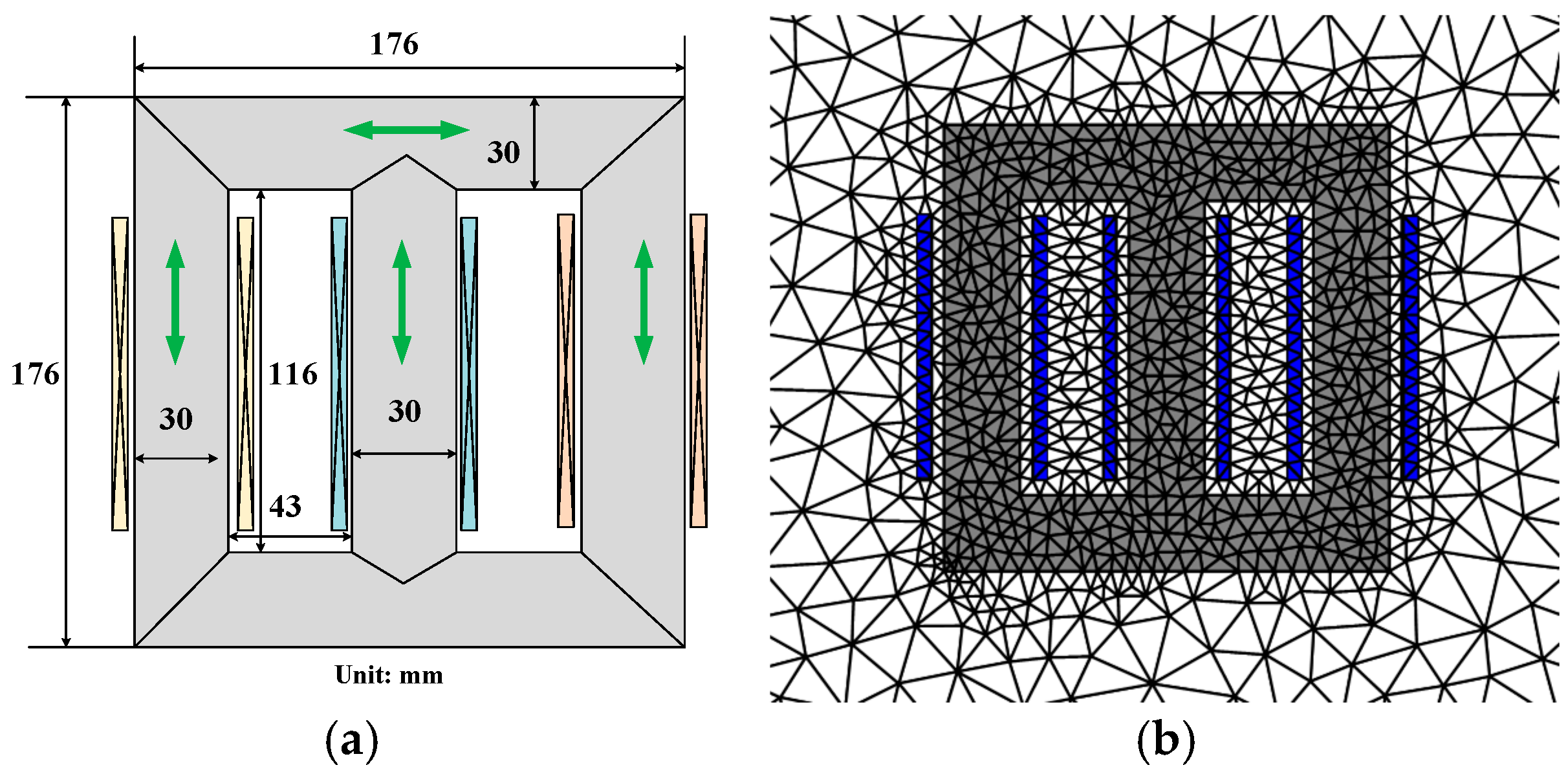
3.1. Governing Equation Derivation of the Two-Dimensional Magnetic Field and Temperature Field
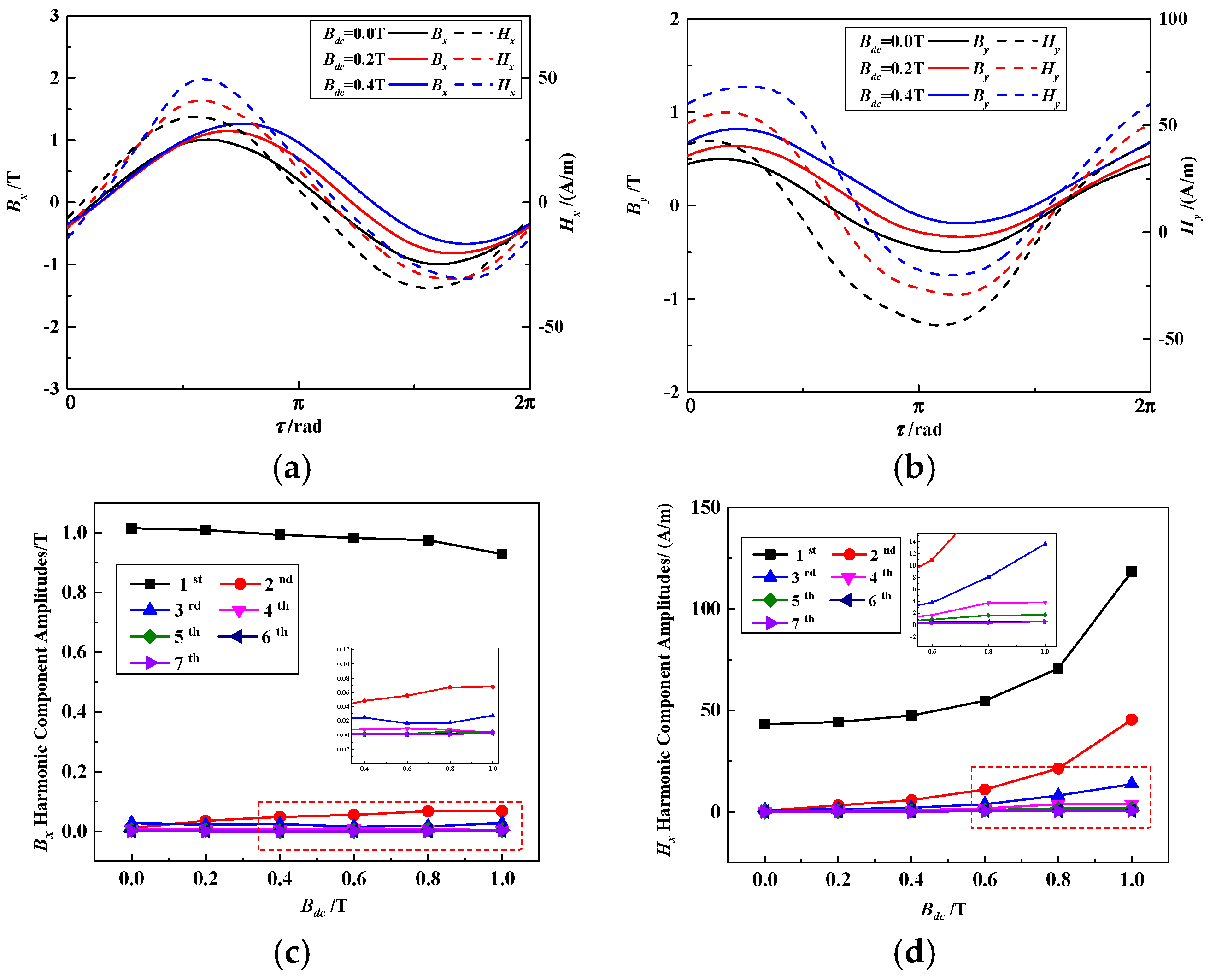
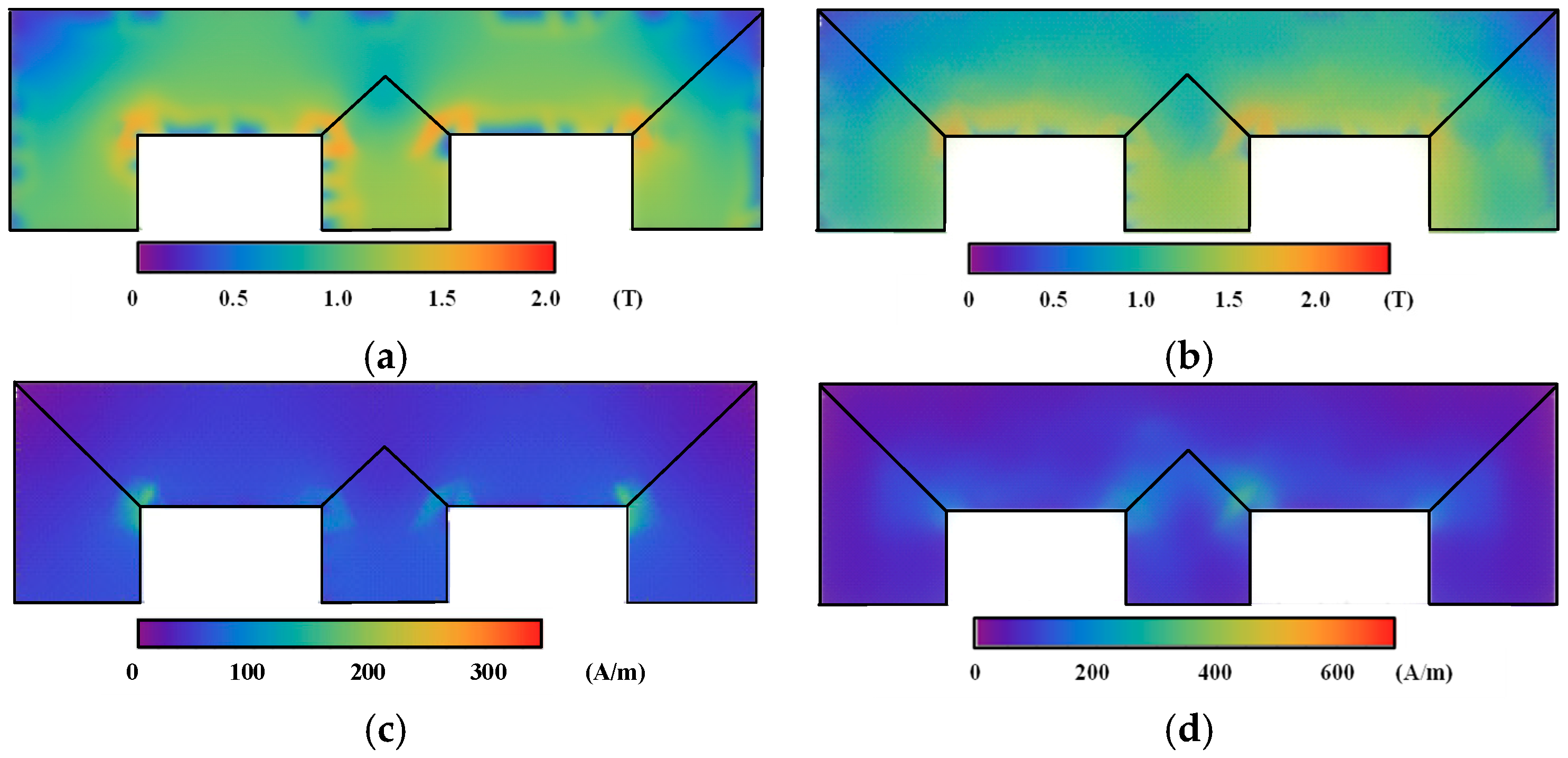
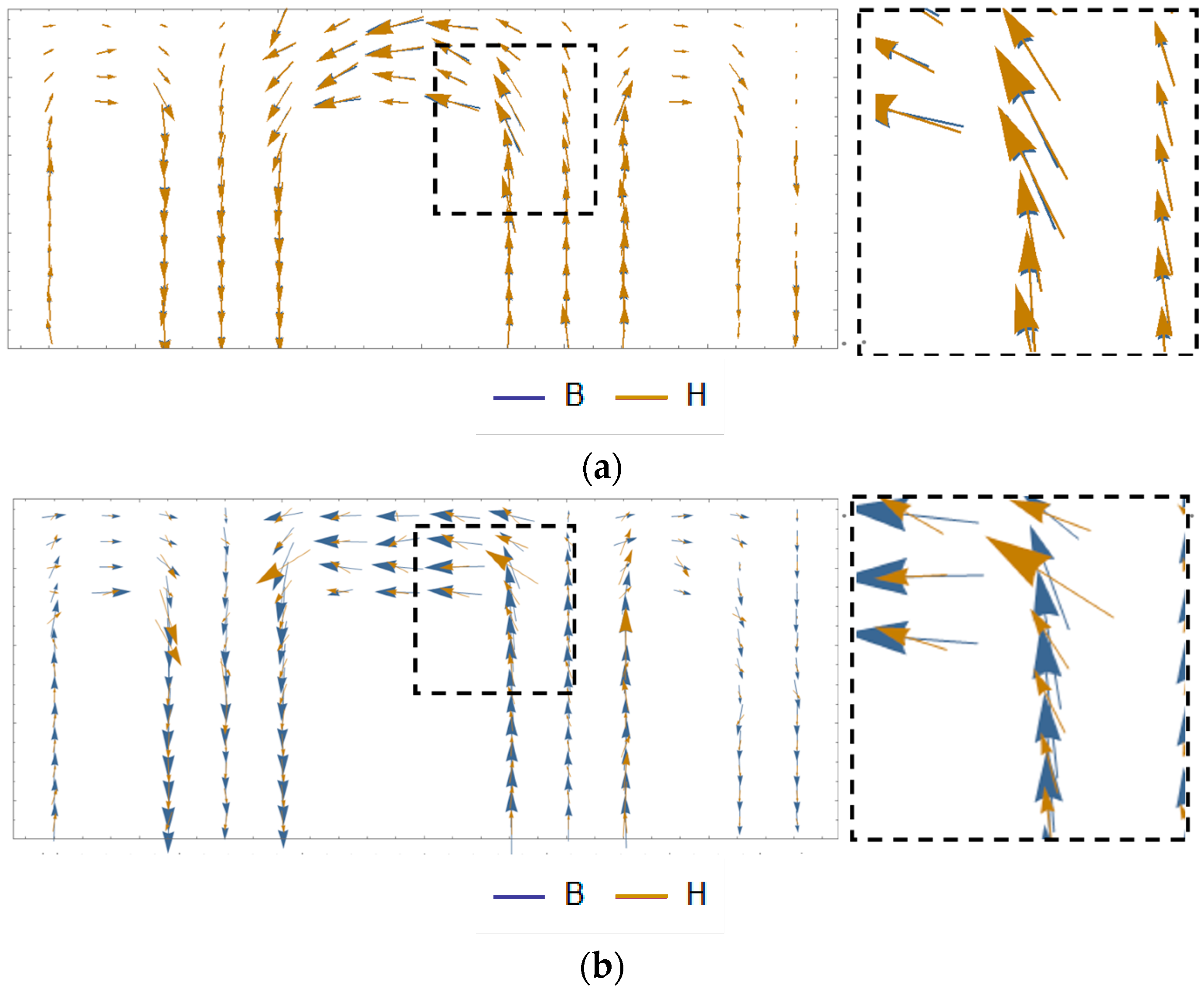
3.2. Analysis of the Magnetic Properties Distribution
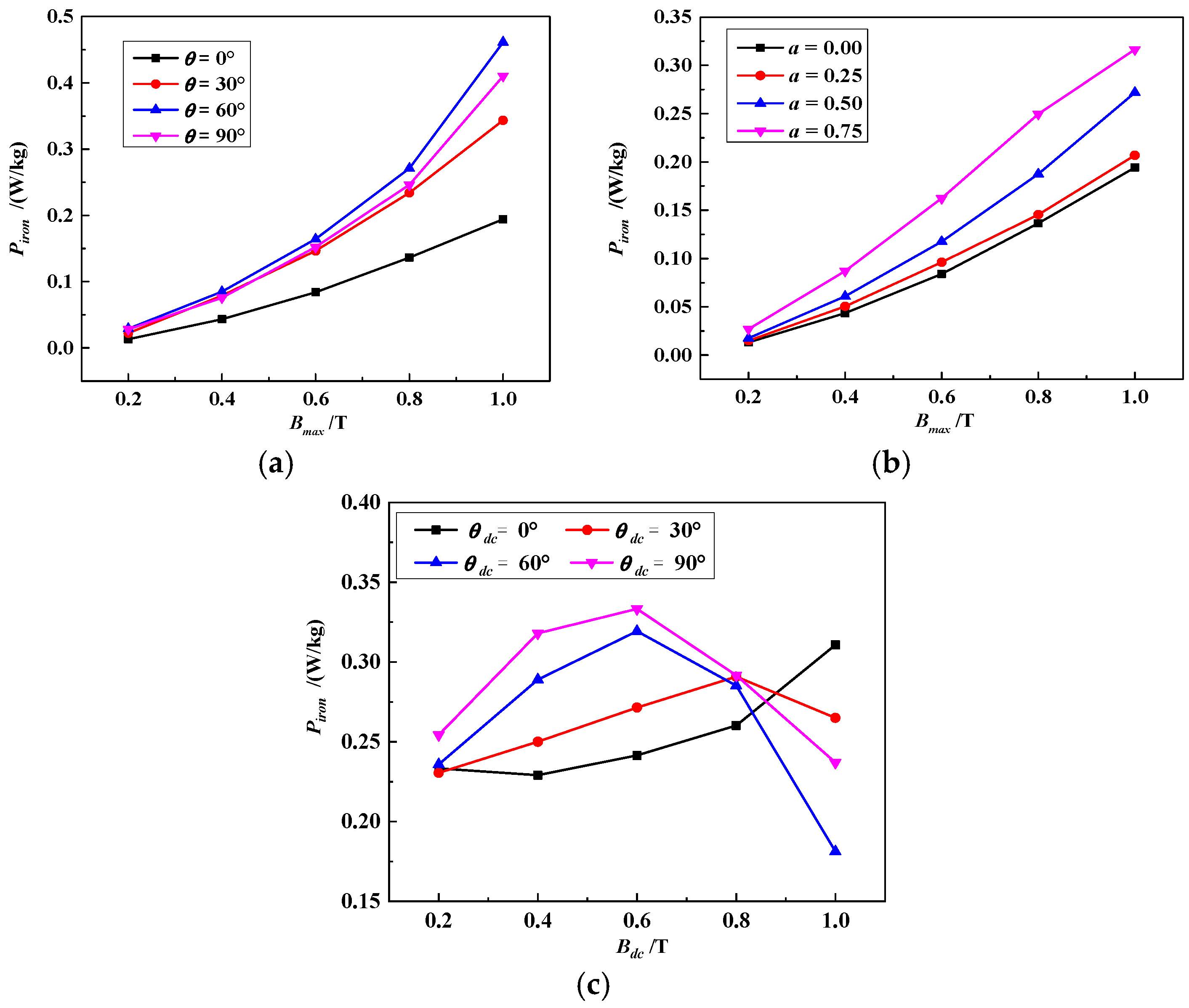
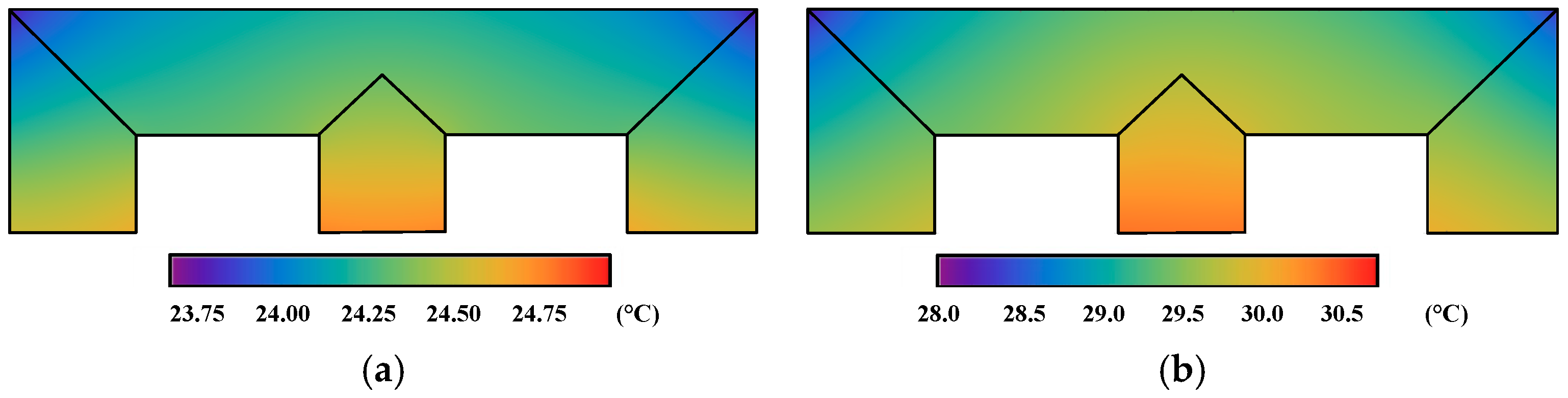
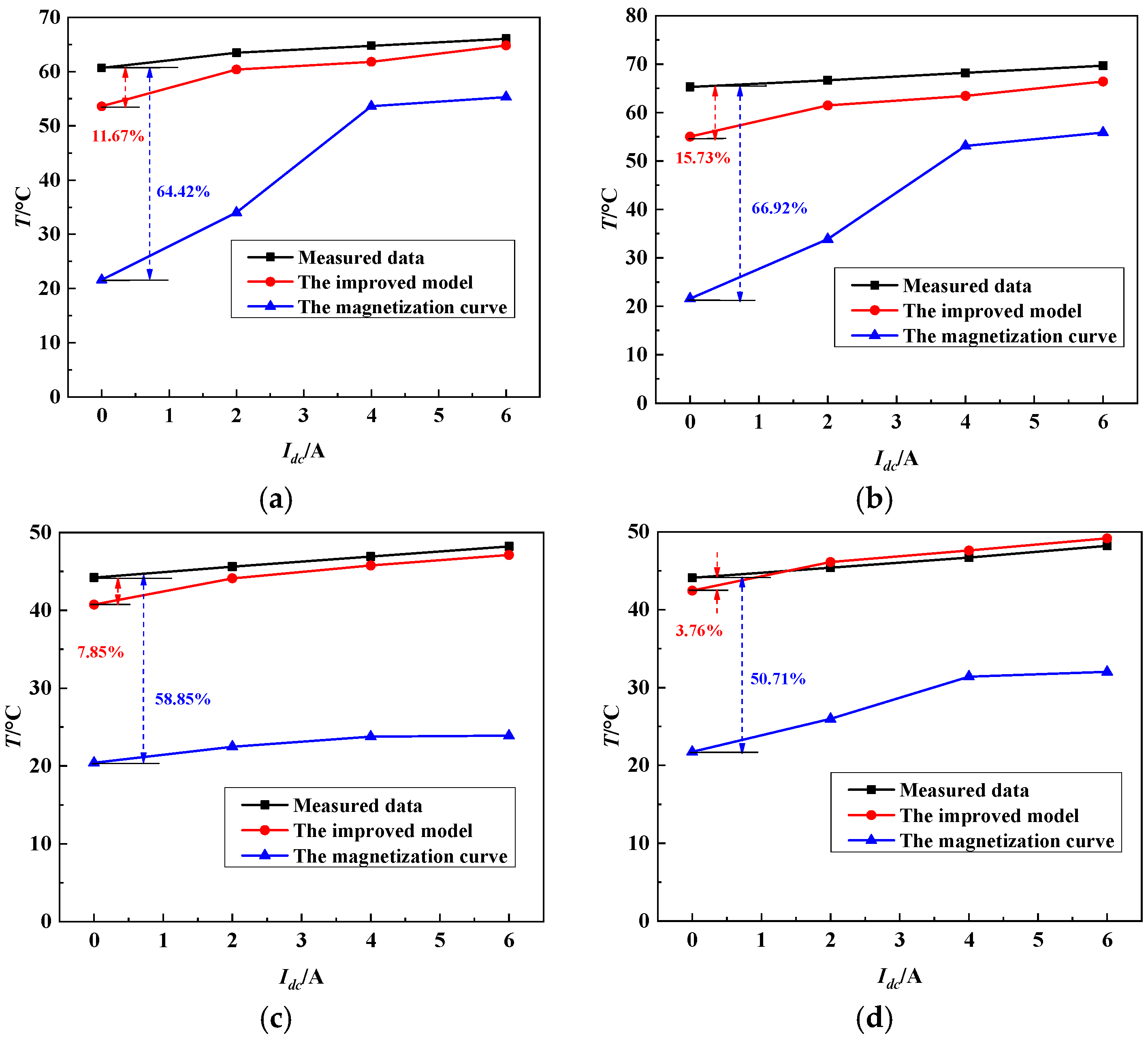
3.3. Analysis of Core Loss and the Temperature
4. Verification of the FEM Calculation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Etemadi, A.H.; Rezaei-Zare, A. Optimal placement of GIC blocking devices for geomagnetic disturbance mitigation. IEEE Trans. Power Syst. 2014, 29, 2753–2762. [Google Scholar] [CrossRef]
- Fang, X.; Ma, D.; Zhao, T.; Fan, W.; Quan, W.; Xiao, Z.; Zhai, Y. Accurate and fast measurement of alkali-metal and noble-gas atoms spin polarizability based on frequency response in SERF co-magnetometer. Measurement 2023, 222, 113562. [Google Scholar] [CrossRef]
- Fang, X.; Wei, K.; Zhai, Y.; Zhao, T.; Chen, X.; Zhou, M.; Liu, Y.; Ma, D.; Xiao, Z. Analysis of effects of magnetic field gradient on atomic spin polarization and relaxation in optically pumped atomic magnetometers. Opt. Express 2022, 30, 3926–3940. [Google Scholar] [CrossRef] [PubMed]
- Larsen, E.V.; Nordell, D.E.; Ponder, J.; Albertson, V.D.; Bozoki, B.; Feero, W.E.; Kappenman, J.G.; Prabhakara, F.S.; Thompson, K.; Walling, R. Geomagnetic disturbance effects on power systems. IEEE Trans. Power Deliv. 1993, 8, 1206–1216. [Google Scholar]
- Lu, J.; Wang, S.; Lu, F.; Lu, C.; Zhang, X.; Ma, D. Hybrid optimal design of square highly uniform magnetic field coils. IEEE Trans. Ind. Electron. 2023, 70, 4236–4244. [Google Scholar] [CrossRef]
- Pulkkinen, A.; Lindahl, S.; Viljanen, A.; Pirjola, R. Geomagnetic storm of 29–31 October 2003: Geomagnetically induced currents and their relation to problems in the Swedish high—voltage power transmission system. Space Weather 2005, 3, 1–19. [Google Scholar] [CrossRef]
- Li, Y.; Luo, Z. A comparative study of J–A and Preisach improved models for core loss calculation under DC bias. Sci. Rep. 2024, 14, 9409. [Google Scholar] [CrossRef]
- Yao, Y.; Chang, S.K.; Ni, G.; Xie, D. 3-D nonlinear transient eddy current calculation of online power transformer under DC bias. IEEE Trans. Magn. 2005, 41, 1840–1843. [Google Scholar]
- Shi, M.; Qiu, A.; Li, J. Vector magnetic properties of electrical steel sheet under DC-biased flux and rotating magnetic fields of varying frequencies. IEEE Trans. Magn. 2021, 57, 7503704. [Google Scholar] [CrossRef]
- Wei, W.; Arne, N.; ·Niklas, M. Common and differential mode of DC-bias in three-phase power transformers. Electr. Eng. 2022, 104, 3993–4004. [Google Scholar]
- Enokizono, M.; Soda, N. Finite element analysis of transformer model core with measured reluctivity tensor. IEEE Trans. Magn. 1997, 33, 4110–4112. [Google Scholar] [CrossRef]
- Shi, M.; Zhang, X.; Yang, J.; Yuan, S.; Wang, L. An optimized measurement method for magnetic properties of permalloy sheet under demagnetization. IEEE Trans. Instrum. Meas. 2022, 71, 1–9. [Google Scholar] [CrossRef]
- Enokizono, M. Vector magneto-hysteresis E&S model and magnetic characteristic analysis. IEEE Trans. Magn. 2006, 42, 915–918. [Google Scholar]
- Bergqvist, A.J. A simple vector generalization of the Jiles-Atherton model of hysteresis. IEEE Trans. Magn. 1996, 32, 4213–4215. [Google Scholar] [CrossRef]
- Chen, J.; Wang, S.; Shang, H.; Hu, H.; Peng, T. Finite element analysis of axial flux permanent magnetic hysteresis dampers based on vector Jiles-Atherton model. IEEE Trans. Energy Convers. 2022, 37, 2472–2481. [Google Scholar] [CrossRef]
- Torre, E.D. Preisach modeling and reversible magnetization. IEEE Trans. Magn. 1990, 26, 3052–3058. [Google Scholar] [CrossRef]
- Riccardo, S.; Riganti-Fulginei, F.; Laudani, A.; Quandam, S. Algorithms to reduce the computational cost of vector Preisach model in view of Finite Element analysis. J. Magn. Magn. Mater. 2022, 546, 168876. [Google Scholar] [CrossRef]
- Soda, N.; Enokizono, M. E&S hysteresis model for two-dimensional magnetic properties. J. Magn. Magn. Mater. 2000, 215–216, 626–628. [Google Scholar]
- Shimoji, H.; Enokizono, M.; Todaka, T.; Honda, T. A new modeling of the vector magnetic property. IEEE Trans. Magn. 2002, 38, 861–864. [Google Scholar] [CrossRef]
- Urata, S.; Enokizono, M.; Todaka, T.; Shimoji, H. Magnetic characteristic analysis of the motor considering 2-D vector magnetic property. IEEE Trans. Magn. 2006, 42, 615–618. [Google Scholar] [CrossRef]
- Kunihiro, N.; Todaka, T.; Enokizono, M. Loss evaluation of an induction motor model core by vector magnetic characteristic analysis. IEEE Trans. Magn. 2011, 47, 1098–1101. [Google Scholar] [CrossRef]
- Yokoyama, D.; Sato, T.; Todaka, T.; Enokizono, M. Comparison of Iron Loss Characteristics of Divided Cores Considering Vector Magnetic Properties. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Shi, M.; Yang, Y. An improved vector hysteresis model incorporating the effect of DC-biased field and its application to FEM analysis of three-limb transformer core. J. Electr. Eng. Technol. 2024, 1–12. [Google Scholar] [CrossRef]
- Xu, W. Numerical Simulation and Experimental Verification on the Vectorial Magnetic Hysteresis of Electromagnetic Materials. Ph.D. Thesis, Xi’an Jiaotong University, Xi’an, China, 2017. [Google Scholar]
- Zhu, J. Numerical Modelling of Magnetic Materials for Computer Aided Design of Electromagnetic Devices. Ph.D. Thesis, University of Technology, Sydney, Australia, 1994. [Google Scholar]
- Zhang, S.; Wang, K.; Li, J.; Sun, J.; Xie, Q.; Hu, X. Tests of DC bias key performances of power transformer with single-phase three-limb core under no-load and rated-load conditions. Proc. CSEE 2019, 39, 4334–4344. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Value | Technical Parameters | Value | ||
|---|---|---|---|---|---|
| Electrical parameters | Rated voltage | Low-voltage side winding | Winding method | Continuous | |
| Rated capacity | 21 MVA | Number of turns | 112 | ||
| High-voltage side winding | Winding method | Sandwich-interleaved | Iron core | Brand | 27RK090 |
| Number of turns | 583~729 | Structure | Single-phase four-limb | ||
| Core Loss P/(W/kg) | Point A | Point B | Point C | Point D | ||||
|---|---|---|---|---|---|---|---|---|
| Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | |
| Idc = 0 A | 2.092 | 0.099 | 2.179 | 0.100 | 1.290 | 0.025 | 1.182 | 0.020 |
| Idc = 2 A | 2.514 | 0.871 | 2.582 | 0.862 | 1.501 | 0.154 | 1.523 | 0.141 |
| Idc = 4 A | 2.602 | 2.092 | 2.704 | 2.062 | 1.602 | 0.234 | 1.716 | 0.251 |
| Idc = 6 A | 2.791 | 2.198 | 2.888 | 2.233 | 1.687 | 0.242 | 1.762 | 0.269 |
| Calculated Error | Point A | Point B | Point C | Point D | ||||
|---|---|---|---|---|---|---|---|---|
| Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | Dynamic Model | Magnetization Curve | |
| Idc = 0 A | 11.67% | 64.42% | 15.73% | 66.92% | 7.85% | 53.84% | 3.76% | 50.71% |
| Idc = 2 A | 4.88% | 46.45% | 7.81% | 49.23% | 3.28% | 50.72% | 1.56% | 42.81% |
| Idc = 4 A | 4.60% | 17.25% | 6.95% | 22.08% | 2.45% | 49.33% | 1.92% | 32.78% |
| Idc = 6 A | 1.89% | 16.29% | 4.717% | 19.81% | 2.26% | 50.45% | 1.98% | 33.58% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, M.; Li, T.; Yuan, S.; Zhang, L.; Ma, Y.; Gao, Y. Iron Loss and Temperature Rise Analysis of a Transformer Core Considering Vector Magnetic Hysteresis Characteristics under Direct Current Bias. Materials 2024, 17, 3767. https://doi.org/10.3390/ma17153767
Shi M, Li T, Yuan S, Zhang L, Ma Y, Gao Y. Iron Loss and Temperature Rise Analysis of a Transformer Core Considering Vector Magnetic Hysteresis Characteristics under Direct Current Bias. Materials. 2024; 17(15):3767. https://doi.org/10.3390/ma17153767
Chicago/Turabian StyleShi, Minxia, Teng Li, Shuai Yuan, Leran Zhang, Yuzheng Ma, and Yi Gao. 2024. "Iron Loss and Temperature Rise Analysis of a Transformer Core Considering Vector Magnetic Hysteresis Characteristics under Direct Current Bias" Materials 17, no. 15: 3767. https://doi.org/10.3390/ma17153767