
Self-Adaptive Intelligent Metasurface Cloak System with Integrated Sensing Units

 and
and 
Abstract
:1. Introduction
2. The System’s Design
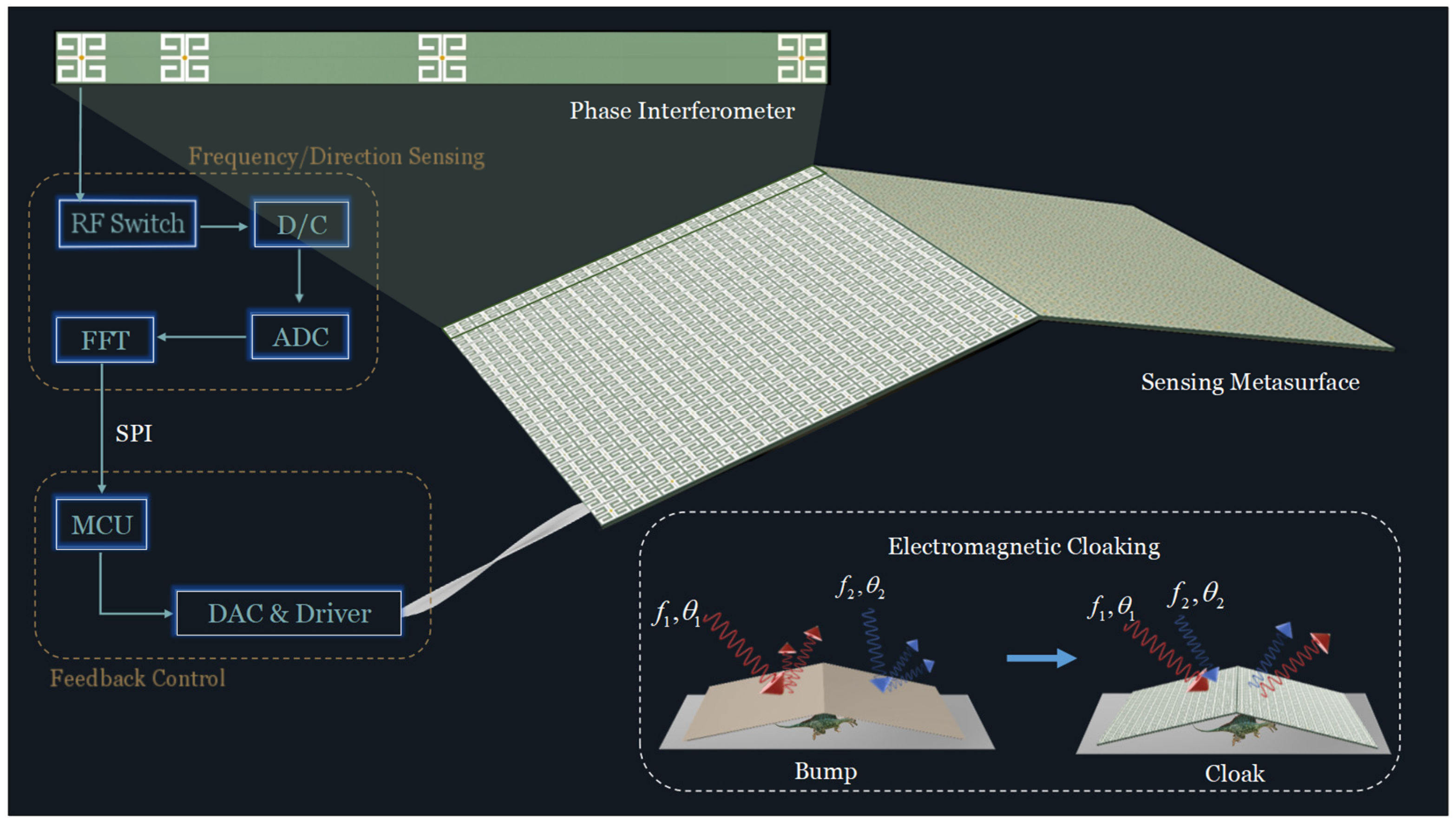
2.1. Architecture of the Intelligent Metasurface Cloak System
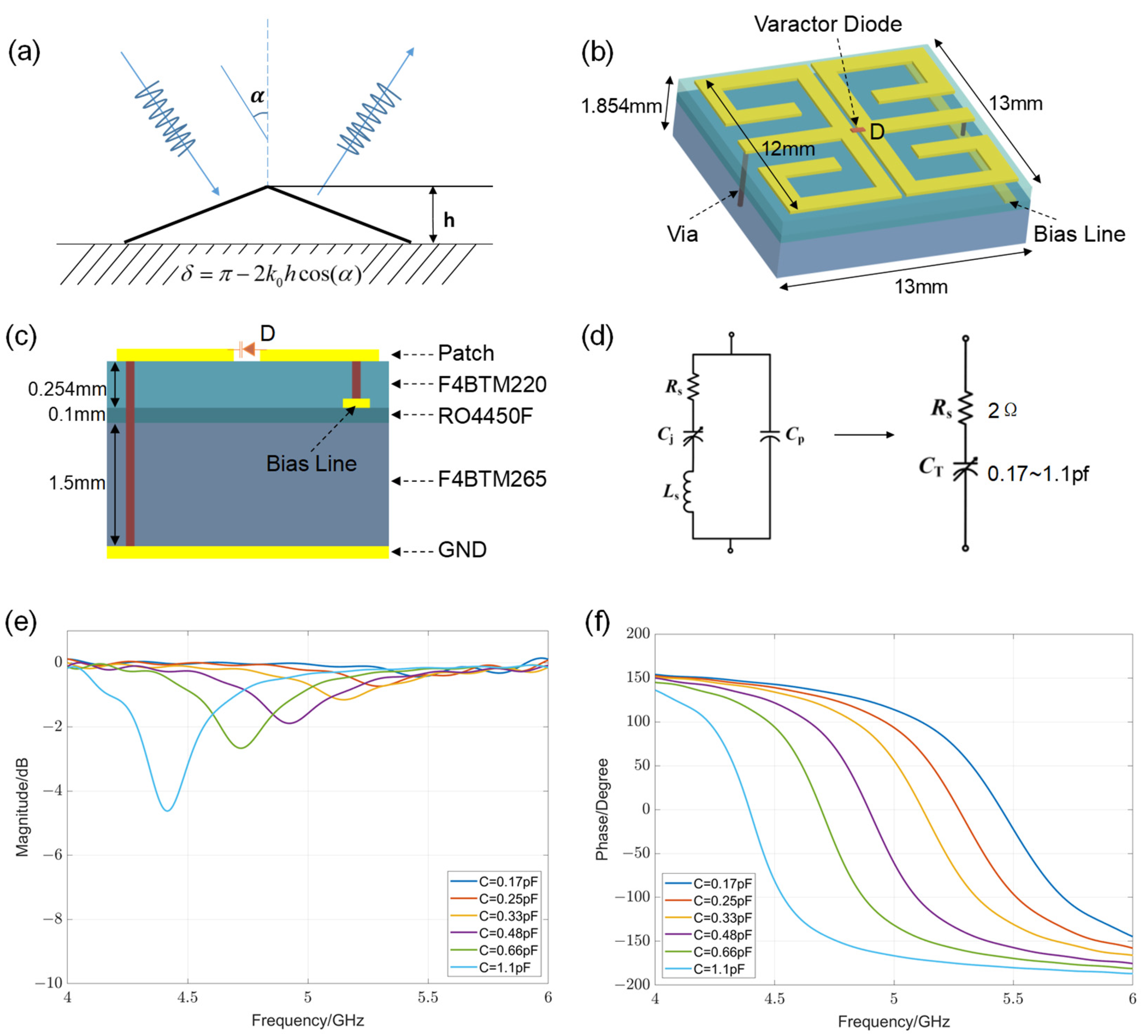
2.2. Reconfigurable Reflective Meta-Atom and Adaptive Metasurface
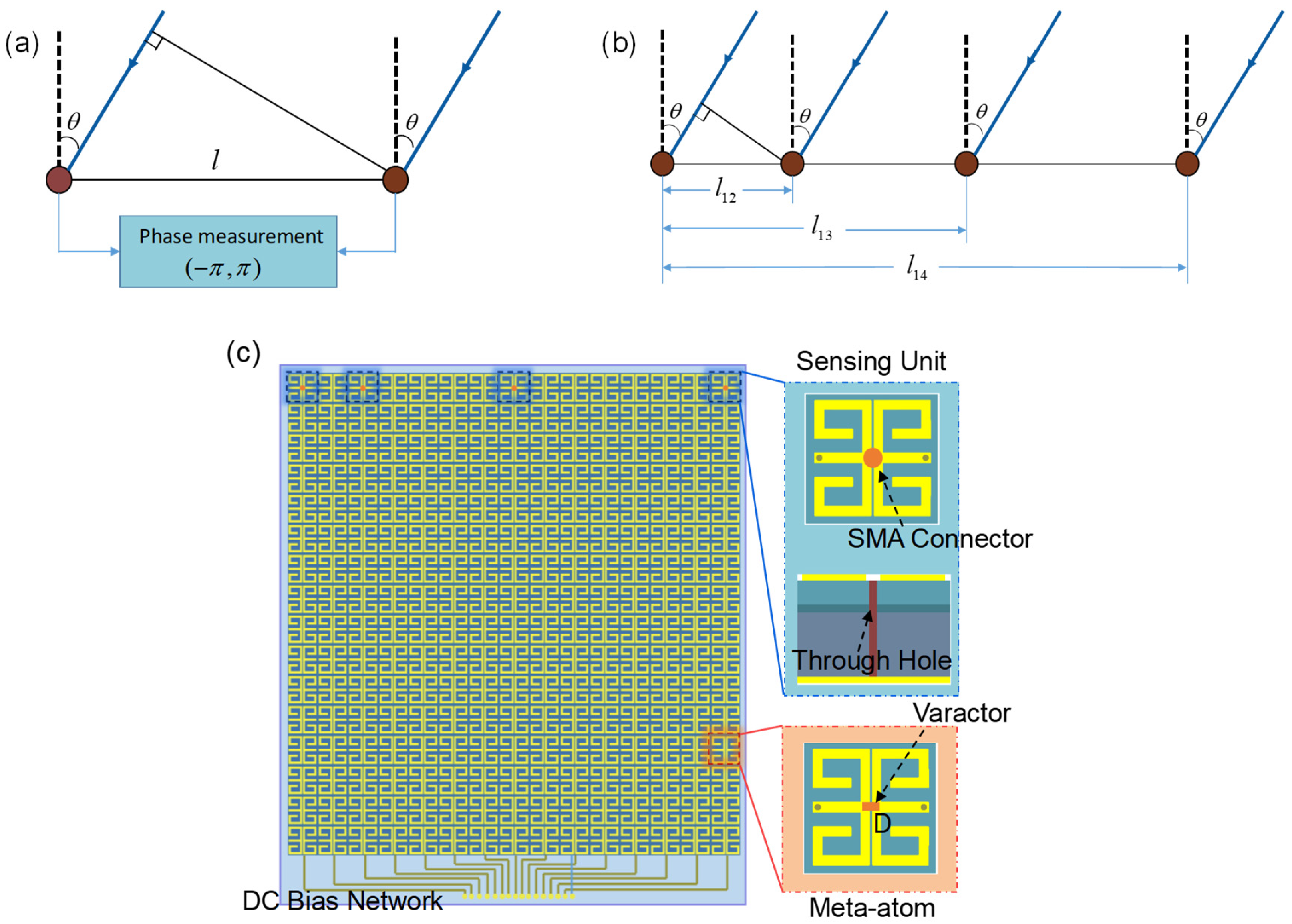
2.3. Direction Sensing Module and Feedback Control Module
3. Experiment Results and Discussion
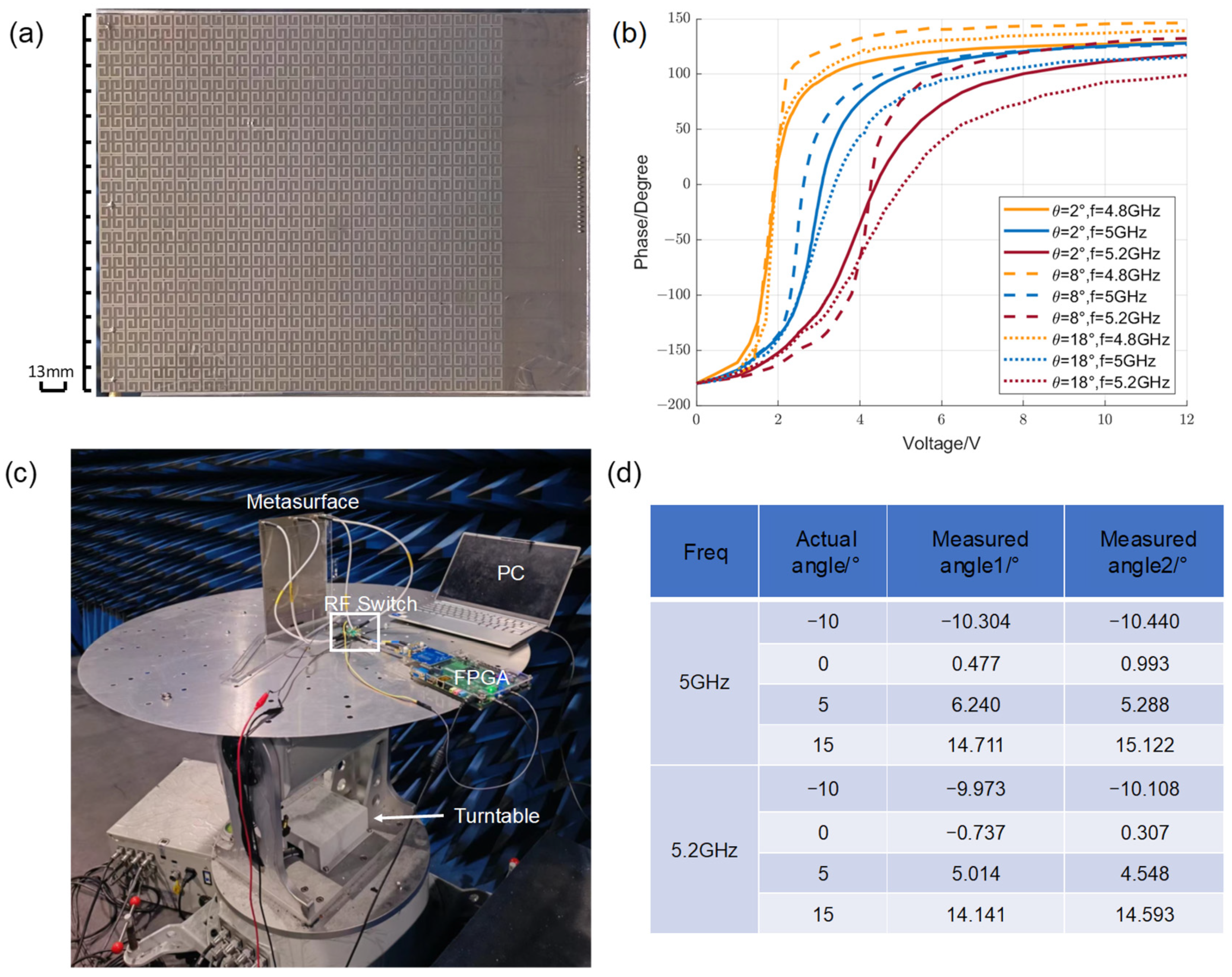
3.1. Reflection Spectrum Verification of the Meta-Atom and Relationship Measurement between the Reflected Phase and the Control Voltage
3.2. Performance Testing of the Direction-Sensing Module
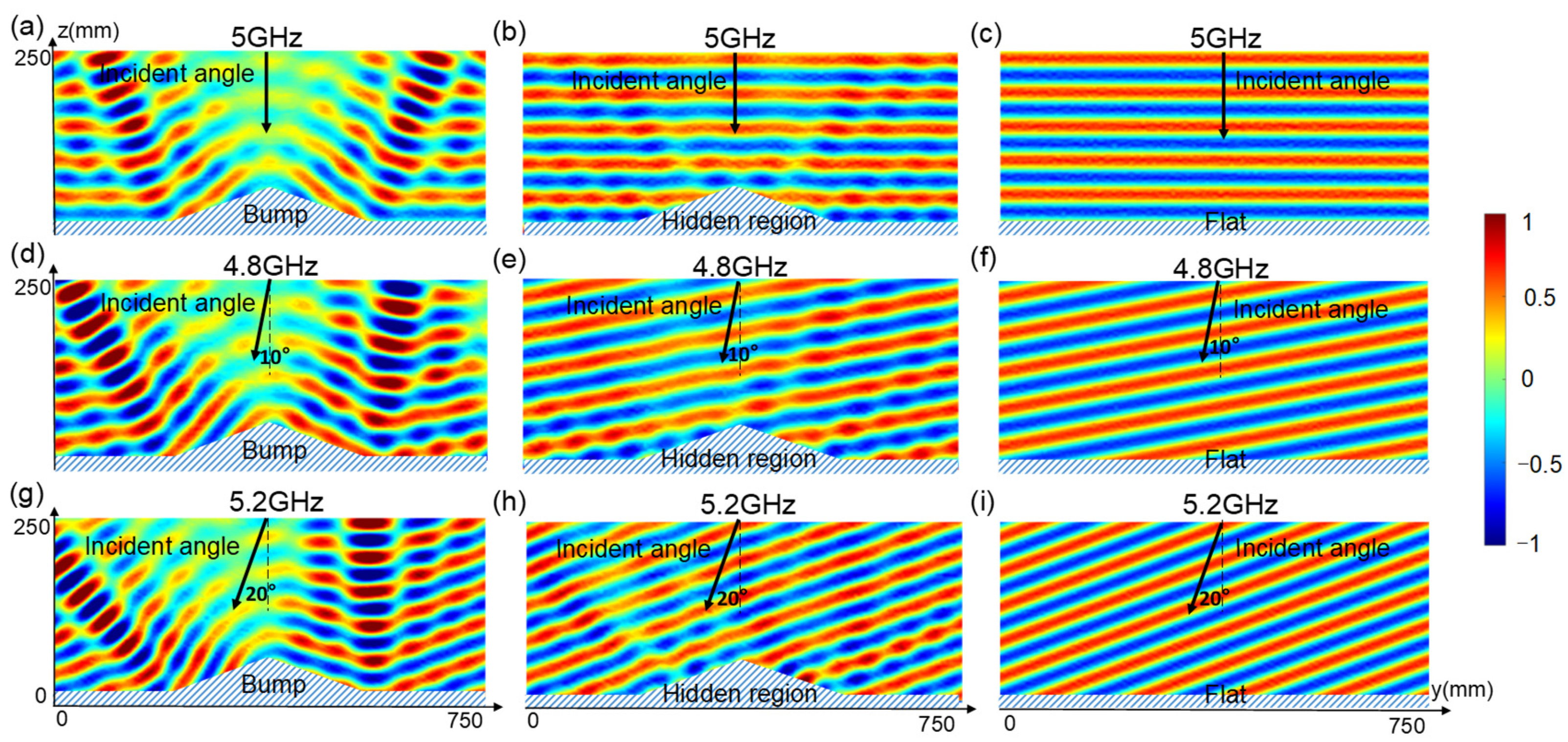
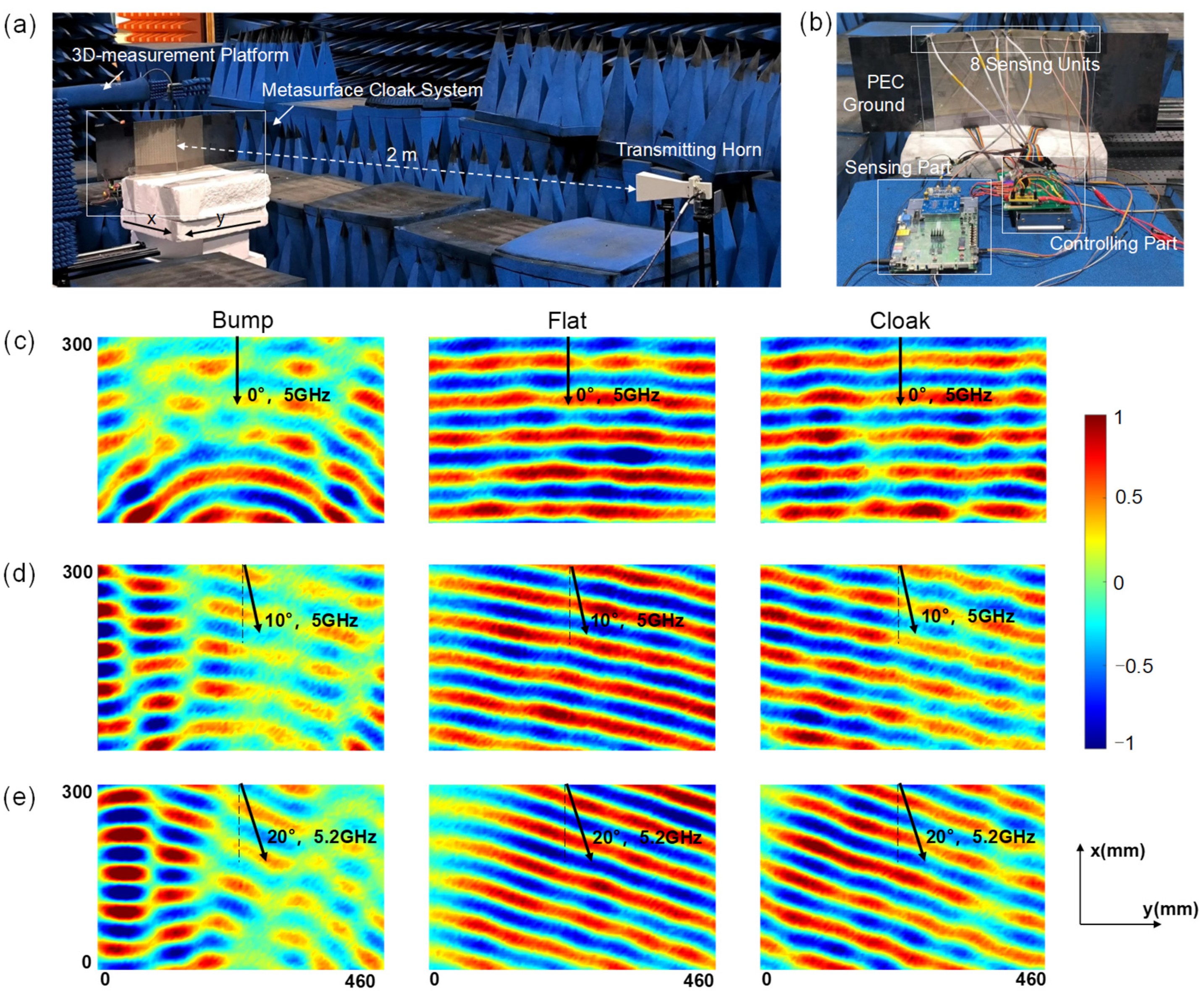
3.3. Experimental Realization of Intelligent Metasurface Cloak System with Self-Adaptive Direction Identification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kuester, E.F.; Mohamed, M.A.; Piket-May, M.; Holloway, C.L. Averaged Transition Conditions for Electromagnetic Fields at a Metafilm. IEEE Trans. Antenn. Propag. 2003, 51, 2641–2651. [Google Scholar] [CrossRef]
- Zhou, W.; Zhu, S.; Zhang, Z.; Zhu, R.; Chen, B.; Zhao, J.; Wei, X.; Lu, H.; Zheng, B. Time-Varying Metasurface Driven Broadband Radar Jamming and Deceptions. Opt. Express 2024, 32, 17911. [Google Scholar] [CrossRef] [PubMed]
- Yu, N.; Capasso, F. Flat Optics with Designer Metasurfaces. Nat. Mater. 2014, 13, 139–150. [Google Scholar] [CrossRef]
- Kazanskiy, N.L.; Khonina, S.N.; Butt, M.A. Metasurfaces: Shaping the Future of Photonics. Sci. Bull. 2024, 69, 1607–1611. [Google Scholar] [CrossRef]
- Ding, F. A Review of Multifunctional Optical Gap-Surface Plasmon Metasurfaces. Prog. Electromagn. Res. 2022, 174, 55–73. [Google Scholar] [CrossRef]
- Zheng, B.; Lu, H.; Qian, C.; Ye, D.; Luo, Y.; Chen, H. Revealing the Transformation Invariance of Full-Parameter Omnidirectional Invisibility Cloaks. Electromagn. Sci. 2023, 1, 1–7. [Google Scholar] [CrossRef]
- Landy, N.; Smith, D.R. A Full-parameter Unidirectional Metamaterial Cloak for Microwaves. Nat. Mater. 2012, 12, 25–28. [Google Scholar] [CrossRef]
- Huang, L.; Chen, X.; Mühlenbernd, H.; Li, G.; Bai, B.; Tan, Q.; Jin, G.; Zentgraf, T.; Zhang, S. Dispersionless Phase Discontinuities for Controlling Light Propagation. Nano Lett. 2012, 12, 5750–5755. [Google Scholar] [CrossRef]
- Mehmood, M.Q.; Mei, S.; Hussain, S.; Huang, K.; Siew, S.Y.; Zhang, L.; Zhang, T.; Ling, X.; Liu, H.; Teng, J.; et al. Visible-Frequency Metasurface for Structuring and Spatially Multiplexing Optical Vortices. Adv. Mater. 2016, 28, 2533–2539. [Google Scholar] [CrossRef]
- Zheng, G.; Mühlenbernd, H.; Kenney, M.; Li, G.; Zentgraf, T.; Zhang, S. Metasurface Holograms Reaching 80% Efficiency. Nat. Nanotechnol. 2015, 10, 308–312. [Google Scholar] [CrossRef]
- Ni, X.; Kildishev, A.V.; Shalaev, V.M. Metasurface Holograms for Visible Light. Nat. Commun. 2013, 4, 2807. [Google Scholar] [CrossRef]
- Lu, H.; Zhao, J.; Zheng, B.; Qian, C.; Cai, T.; Li, E.; Chen, H. Eye Accommodation-Inspired Neuro-Metasurface Focusing. Nat. Commun. 2023, 14, 3301. [Google Scholar] [CrossRef] [PubMed]
- Richards, C.A.; Ocier, C.R.; Xie, D.; Gao, H.; Robertson, T.; Goddard, L.L.; Christiansen, R.E.; Cahill, D.G.; Braun, P.V. Hybrid Achromatic Microlenses with High Numerical Apertures and Focusing Efficiencies across the Visible. Nat. Commun. 2023, 14, 3119. [Google Scholar] [CrossRef]
- Hawkes, A.M.; Katko, A.R.; Cummer, S.A. A Microwave Metamaterial with Integrated Power Harvesting Functionality. Appl. Phys. Lett. 2013, 103, 163901. [Google Scholar] [CrossRef]
- Ramahi, O.M.; Almoneef, T.S.; AlShareef, M.; Boybay, M.S. Metamaterial Particles for Electromagnetic Energy Harvesting. Appl. Phys. Lett. 2012, 101, 173903. [Google Scholar] [CrossRef]
- Ni, X.; Wong, Z.J.; Mrejen, M.; Wang, Y.; Zhang, X. An Ultrathin Invisibility Skin Cloak for Visible Light. Science 2015, 349, 1310–1314. [Google Scholar] [CrossRef]
- Li, J.; Pendry, J.B. Hiding under the carpet: A new strategy for cloaking. Phys. Rev. Lett. 2008, 101, 2952–2965. [Google Scholar] [CrossRef]
- Yang, J.; Huang, C.; Wu, X.; Sun, B.; Luo, X. Dual-Wavelength Carpet Cloak Using Ultrathin Metasurface. Adv. Opt. Mater. 2018, 6, 1800073. [Google Scholar] [CrossRef]
- Orazbayev, B.; Mohammadi Estakhri, N.; Beruete, M.; Alù, A. Terahertz Carpet Cloak Based on a Ring Resonator Metasurface. Phys. Rev. B 2015, 91, 195444. [Google Scholar] [CrossRef]
- Gao, X.; Yang, W.L.; Ma, H.F.; Cheng, Q.; Yu, X.H.; Cui, T.J. A Reconfigurable Broadband Polarization Converter Based on an Active Metasurface. IEEE Trans. Antenn. Propag. 2018, 66, 6086–6095. [Google Scholar] [CrossRef]
- Zhao, J.; Cheng, Q.; Chen, J.; Qi, M.Q.; Jiang, W.X.; Cui, T.J. A Tunable Metamaterial Absorber Using Varactor Diodes. New J. Phys. 2013, 15, 043049. [Google Scholar] [CrossRef]
- Imani, M.F.; Smith, D.R.; del Hougne, P. Perfect Absorption in a Disordered Medium with Programmable Meta-Atom Inclusions. Adv. Funct. Mater. 2020, 30, 2005310. [Google Scholar] [CrossRef]
- Huang, M.; Zheng, B.; Li, R.; Shen, L.; Li, X.; Lu, H.; Zhu, R.; Cai, T.; Chen, H. Evolutionary Games-Assisted Synchronization Metasurface for Simultaneous Multisource Invisibility Cloaking. Adv. Funct. Mater. 2024, 34, 2401909. [Google Scholar] [CrossRef]
- Lau, J.Y.; Hum, S.V. A Wideband Reconfigurable Transmitarray Element. IEEE Trans. Antenn. Propag. 2012, 60, 1303–1311. [Google Scholar] [CrossRef]
- Frank, M.; Lurz, F.; Weigel, R.; Koelpin, A. Electronically Reconfigurable 6 × 6 Element Transmitarray at K-Band Based on Unit Cells with Continuous Phase Range. IEEE Antenn. Wirel. Propag. Lett. 2019, 18, 796–800. [Google Scholar] [CrossRef]
- Cui, T.J.; Qi, M.Q.; Wan, X.; Zhao, J.; Cheng, Q. Coding Metamaterials, Digital Metamaterials and Programmable Metamaterials. Light Sci. Appl. 2014, 3, e218. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, C.; Yang, J.; Sun, B.; Zhao, B.; Luo, X. Reconfigurable Metasurface for Multifunctional Control of Electromagnetic Waves. Adv. Opt. Mater. 2017, 5, 1700485. [Google Scholar] [CrossRef]
- Huang, C.; Sun, B.; Pan, W.; Cui, J.; Wu, X.; Luo, X. Dynamical Beam Manipulation Based on 2-Bit Digitally-Controlled Coding Metasurface. Sci. Rep. 2017, 7, 42302. [Google Scholar] [CrossRef]
- Cong, L.; Pitchappa, P.; Wu, Y.; Ke, L.; Lee, C.; Singh, N.; Yang, H.; Singh, R. Active Multifunctional Microelectromechanical System Metadevices: Applications in Polarization Control, Wavefront Deflection, and Holograms. Adv. Opt. Mater. 2016, 5, 1600716. [Google Scholar] [CrossRef]
- Hum, S.V.; Perruisseau-Carrier, J. Reconfigurable Reflectarrays and Array Lenses for Dynamic Antenna Beam Control: A Review. IEEE Trans. Antennas Propag. 2014, 62, 183–198. [Google Scholar] [CrossRef]
- Huang, C.; Yang, J.; Wu, X.; Song, J.; Pu, M.; Wang, C.; Luo, X. Reconfigurable Metasurface Cloak for Dynamical Electromagnetic Illusions. ACS Photonics 2017, 5, 1718–1725. [Google Scholar] [CrossRef]
- Qian, C.; Zheng, B.; Shen, Y.; Jing, L.; Li, E.; Shen, L.; Chen, H. Deep-Learning-Enabled Self-Adaptive Microwave Cloak without Human Intervention. Nat. Photonics 2020, 14, 383–390. [Google Scholar] [CrossRef]
- Qian, C.; Jia, Y.; Wang, Z.; Chen, J.; Lin, P.; Zhu, X.; Li, E.; Chen, H. Autonomous Aeroamphibious Invisibility Cloak with Stochastic-Evolution Learning. Adv. Photonics 2024, 6, 016001. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Mathews, C.P. Real-Time Frequency and 2-D Angle Estimation with Sub-Nyquist Spatio-Temporal Sampling. IEEE Trans. Signal Process. 1993, 42, 2781–2794. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Zhao, J.; Luo, C.; Pei, Z.; Jin, H.; Huang, Y.; Zhou, W.; Zheng, B. Self-Adaptive Intelligent Metasurface Cloak System with Integrated Sensing Units. Materials 2024, 17, 4863. https://doi.org/10.3390/ma17194863
Li P, Zhao J, Luo C, Pei Z, Jin H, Huang Y, Zhou W, Zheng B. Self-Adaptive Intelligent Metasurface Cloak System with Integrated Sensing Units. Materials. 2024; 17(19):4863. https://doi.org/10.3390/ma17194863
Chicago/Turabian StyleLi, Panyi, Jiwei Zhao, Caofei Luo, Zhicheng Pei, Hui Jin, Yitian Huang, Wei Zhou, and Bin Zheng. 2024. "Self-Adaptive Intelligent Metasurface Cloak System with Integrated Sensing Units" Materials 17, no. 19: 4863. https://doi.org/10.3390/ma17194863