
Investigating the Impact of Carbon Fiber as a Wheelchair Frame Material on Its Ability to Dissipate Kinetic Energy and Reduce Vibrations

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
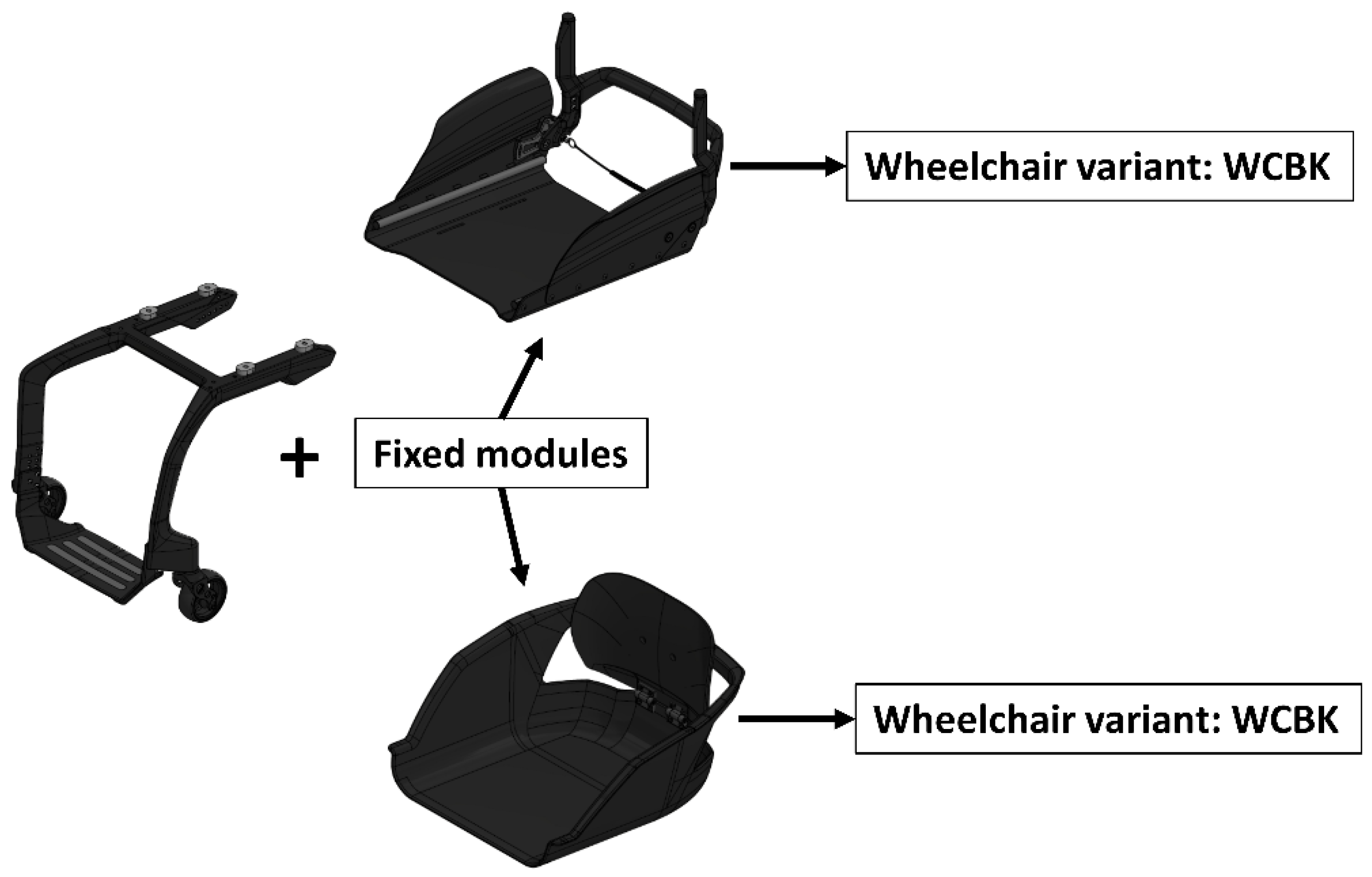
2.1. Tested Wheelchairs
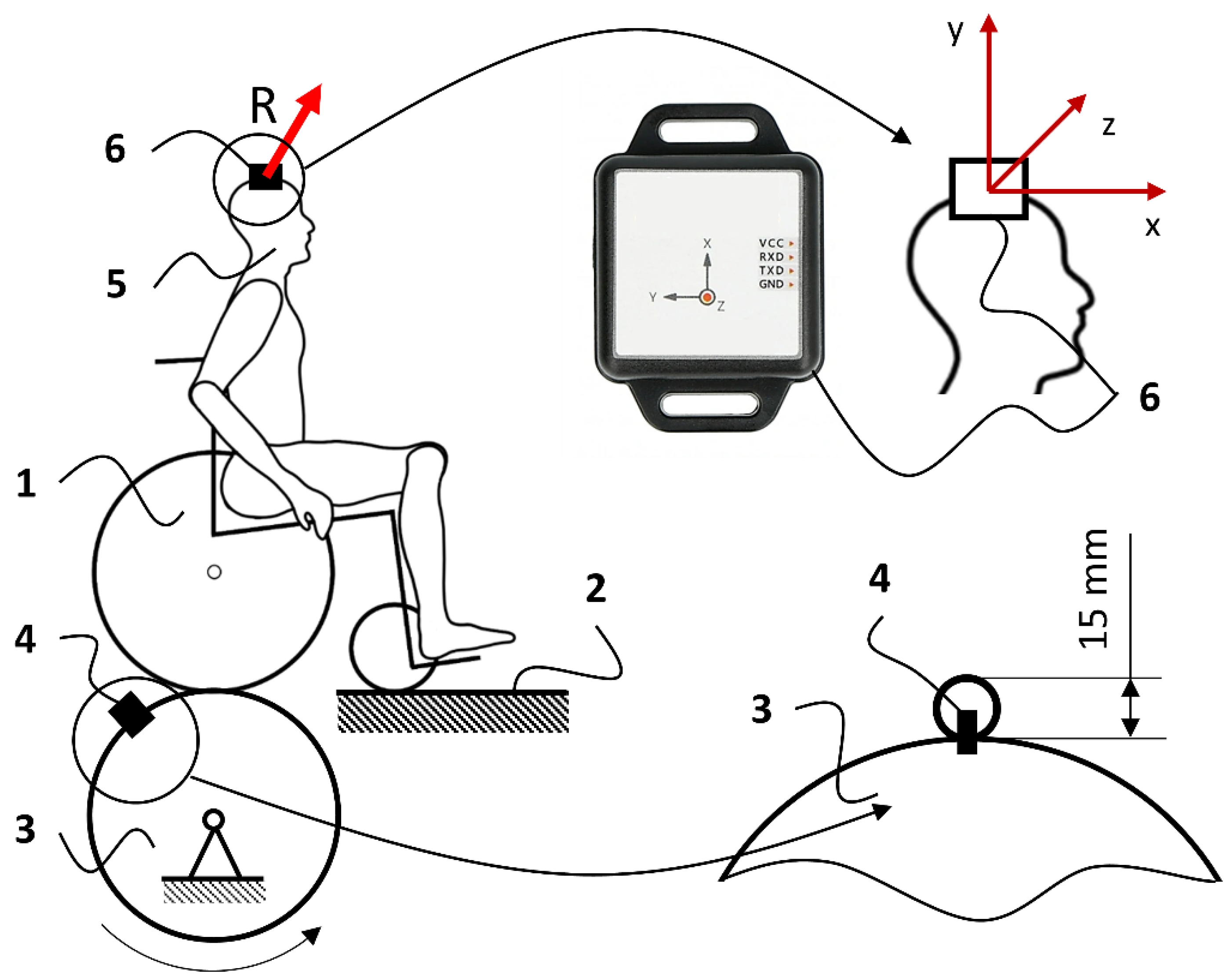
2.2. Research Equipment
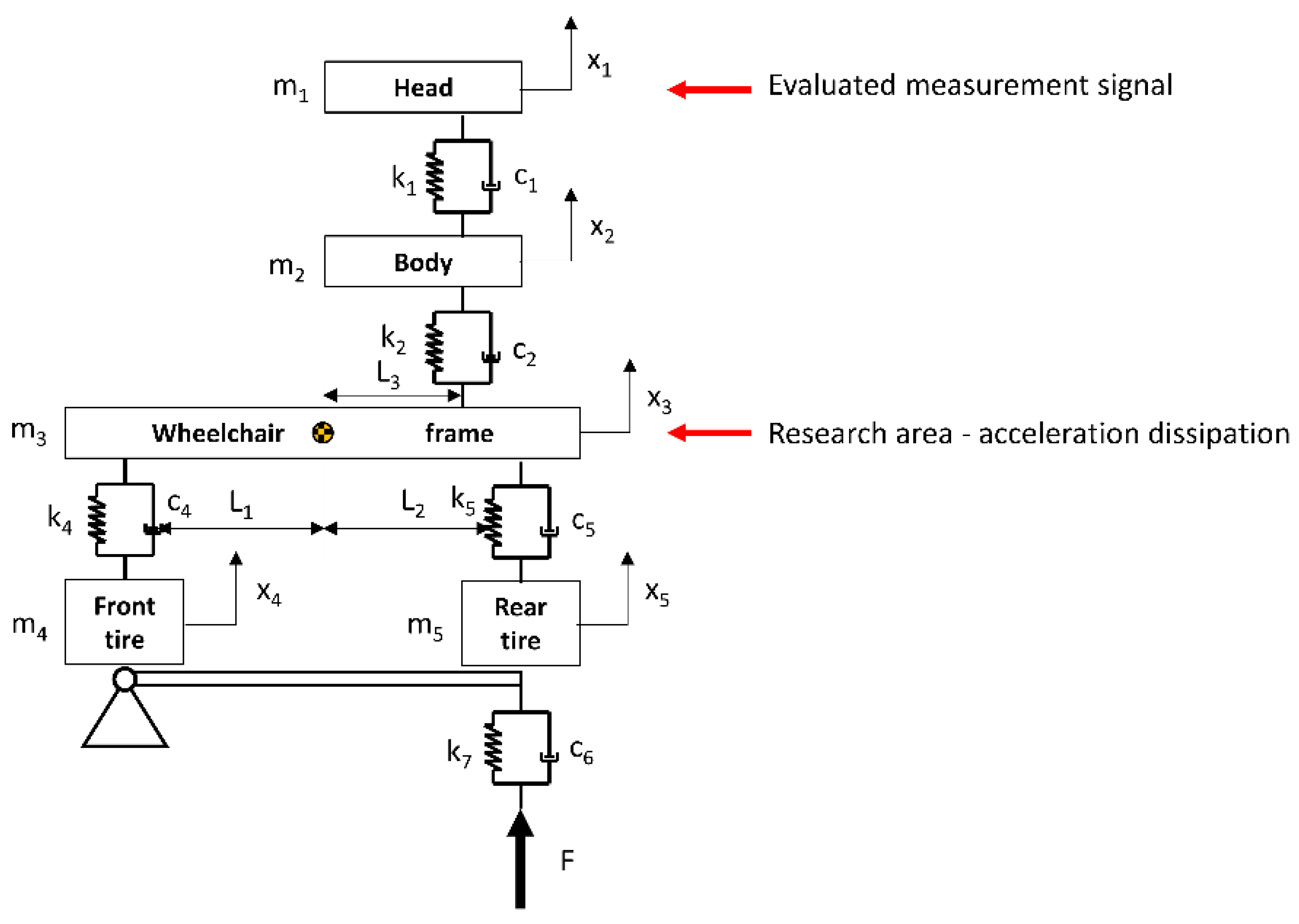
2.3. Analytical Model
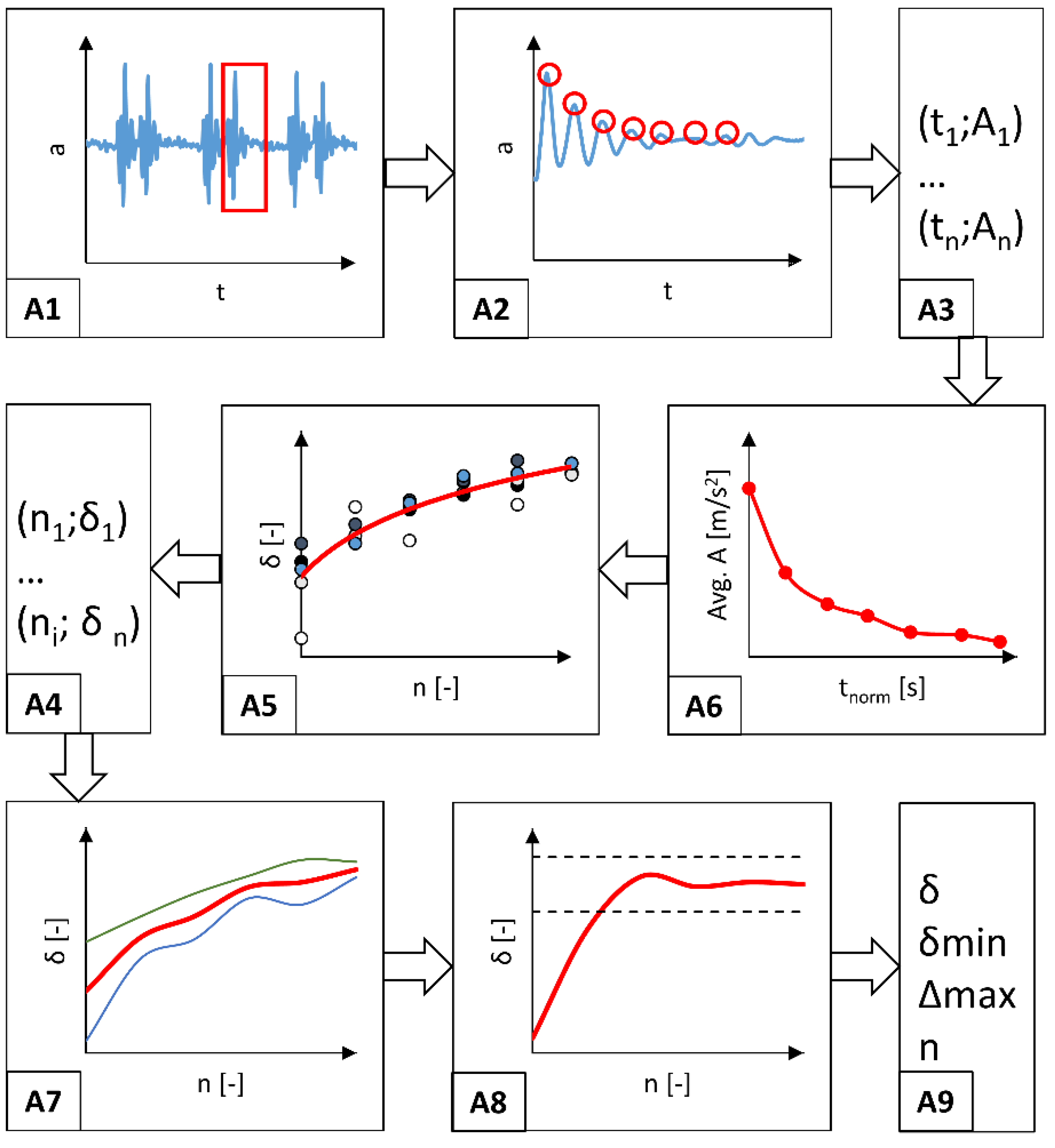
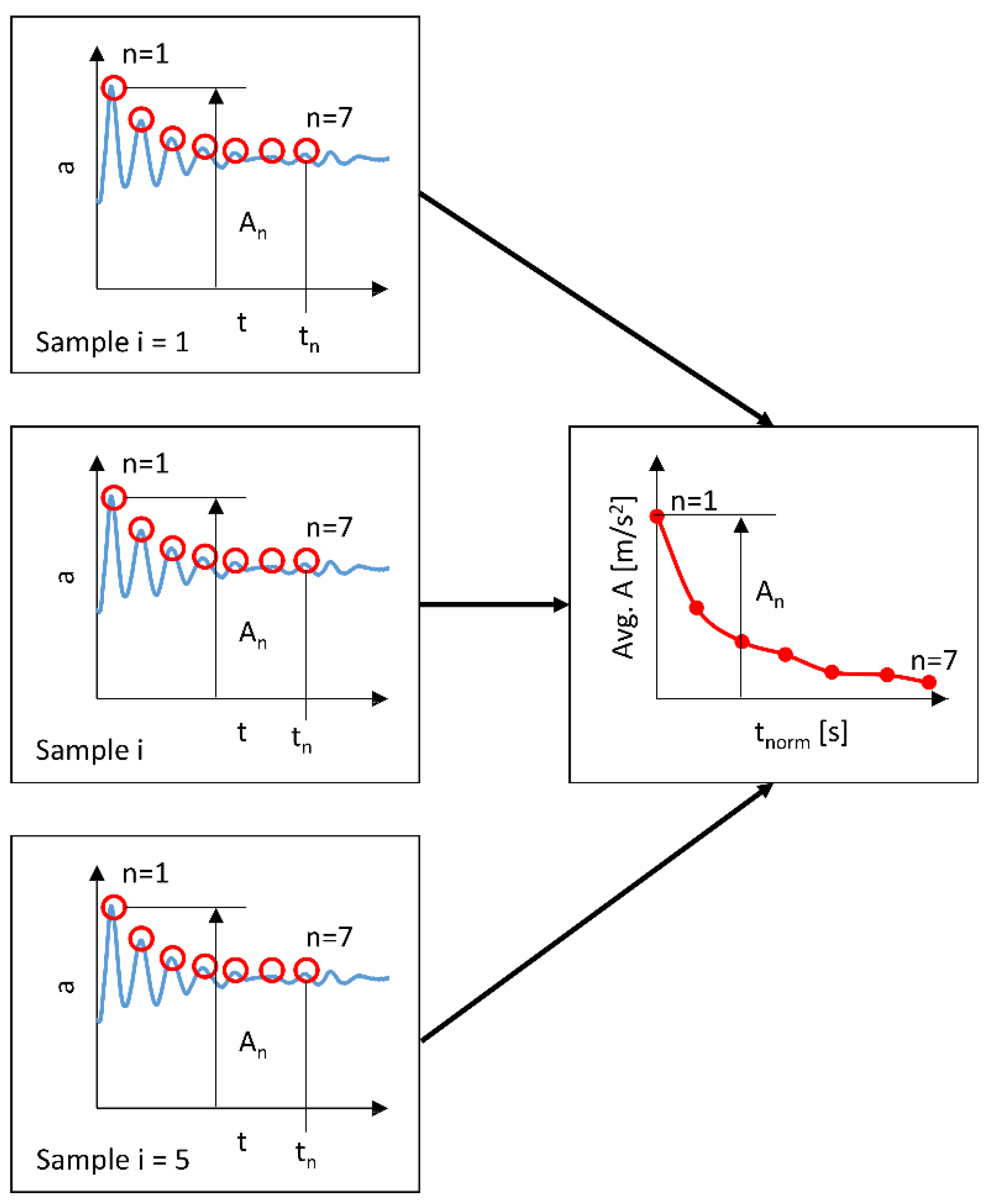
2.4. Signal Processing Research Methodology
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Branowski, B.; Pohl, P.; Rychlik, M.; Zablocki, M. Integral Model of the Area of Reaches and Forces of a Disabled Person with Dysfunction of Lower Limbs as a Tool in Virtual Assessment of Manipulation Possibilities in Selected Work Environments. In Proceedings of the Universal Access in Human-Computer Interaction, Orlando, FL, USA, 9–14 July 2011; Stephanidis, C., Ed.; Users Diversity. Springer: Berlin/Heidelberg, Germany, 2011; pp. 12–21. [Google Scholar]
- Ahasan, R.; Campbell, D.; Salmoni, A.; Lewko, J. Ergonomics of Living Environment for the People with Special Needs. J. Physiol. Anthropol. Appl. Human Sci. 2001, 20, 175–185. [Google Scholar] [CrossRef]
- Sydor, M.; Pop, J.; Jasińska, A.; Zabłocki, M. Anthropo-Mechanical Cradles: A Multidisciplinary Review. Int. J. Environ. Res. Public. Health 2022, 19, 15759. [Google Scholar] [CrossRef]
- Wieczorek, B. The Wheelchair Propulsion Wheel Rotation Angle Function Symmetry in the Propelling Phase: Motion Capture Research and a Mathematical Model. Symmetry 2022, 14, 576. [Google Scholar] [CrossRef]
- Warguła, Ł.; Marciniak, A. The Symmetry of the Muscle Tension Signal in the Upper Limbs When Propelling a Wheelchair and Innovative Control Systems for Propulsion System Gear Ratio or Propulsion Torque: A Pilot Study. Symmetry 2022, 14, 1002. [Google Scholar] [CrossRef]
- Maeda, S.; Futatsuka, M.; Yonesaki, J.; Ikeda, M. Relationship between Questionnaire Survey Results of Vibration Complaints of Wheelchair Users and Vibration Transmissibility of Manual Wheelchair. Environ. Health Prev. Med. 2003, 8, 82–89. [Google Scholar] [CrossRef]
- Herrera-Saray, P.; Peláez-Ballestas, I.; Ramos-Lira, L.; Sánchez-Monroy, D.; Burgos-Vargas, R. Usage Problems and Social Barriers Faced by Persons With a Wheelchair and Other Aids. Qualitative Study From the Ergonomics Perspective in Persons Disabled by Rheumatoid Arthritis and Other Conditions. Reumatol. Clínica Engl. Ed. 2013, 9, 24–30. [Google Scholar] [CrossRef]
- Blach Rossen, C.; Sørensen, B.; Würtz Jochumsen, B.; Wind, G. Everyday Life for Users of Electric Wheelchairs—A Qualitative Interview Study. Disabil. Rehabil. Assist. Technol. 2012, 7, 399–407. [Google Scholar] [CrossRef]
- Krantz, O.; Egard, H. Use of Active Wheelchairs in Everyday Life: Experiences among Experienced Users of Active Ultra Lightweight Rigid Frame Wheelchairs. Disabil. Rehabil. Assist. Technol. 2017, 12, 65–72. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.-W.; Patrangenaru, V.; Singhose, W.; Sprigle, S. Identification of Human-Generated Forces on Wheelchairs during Total-Body Extensor Thrusts. Clin. Biomech. 2006, 21, 790–798. [Google Scholar] [CrossRef] [PubMed]
- Sprigle, S.; Linden, M. Accelerations Experienced by Wheelchair Users with Spinalcord Injury in a Moving Van. Technol. Disabil. 1996, 5, 81–91. [Google Scholar] [CrossRef]
- Sitnik, L.J.; Magdziak-Tokłowicz, M.; Wróbel, R.; Kardasz, P. Vehicle Vibration in Human Health. J. KONES 2013, 20, 411–418. [Google Scholar] [CrossRef]
- Smith, S.D. Characterizing the Effects of Airborne Vibration on Human Body Vibration Response. Aviat. Space Environ. Med. 2002, 73, 36–45. [Google Scholar]
- Graaf, B.D.; Van Weperen, W. The Retention of Blance: An Exploratory Study into the Limits of Acceleration the Human Body Can Withstand without Losing Equilibrium. Hum. Factors 1997, 39, 111–118. [Google Scholar] [CrossRef] [PubMed]
- Wieczorek, B.; Kaczmarzyk, P.; Warguła, Ł.; Giedrowicz, M.; Bąk, D.; Gierz, Ł.; Stambolov, G.; Kostov, B. Research on the Distribution of Axial Excitation of Positive Pressure Ventilators in the Aspect of Stability Safety of the Load-Bearing Frame. Adv. Sci. Technol. Res. J. 2023, 18, 142–154. [Google Scholar] [CrossRef] [PubMed]
- Wolf, E.J.; Cooper, M.S.R.A.; DiGiovine, C.P.; Boninger, M.L.; Guo, S. Using the Absorbed Power Method to Evaluate Effectiveness of Vibration Absorption of Selected Seat Cushions during Manual Wheelchair Propulsion. Med. Eng. Phys. 2004, 26, 799–806. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Mendez, Y.; Pearlman, J.L.; Cooper, R.A.; Boninger, M.L. GDynamic Stiffness and Transmissibility of Commercially Available Wheelchair Cushions Using a Laboratory Test Method. J. Rehabil. Res. Dev. 2012, 49, 7. [Google Scholar] [CrossRef] [PubMed]
- Chwalik-Pilszyk, G.; Dziechciowski, Z.; Kromka-Szydek, M.; Kozień, M. Experimental Study of the Influence of Using Polyurethane Cushion to Reduce Vibration Received by a Wheelchair User. Acta Bioeng. Biomech. 2023, 25, 137–149. [Google Scholar] [CrossRef]
- Kwarciak, A.M.; Cooper, R.A.; Ammer, W.A.; Fitzgerald, S.G.; Boninger, M.L.; Cooper, R. Fatigue Testing of Selected Suspension Manual Wheelchairs Using ANSI/RESNA Standards. Arch. Phys. Med. Rehabil. 2005, 86, 123–129. [Google Scholar] [CrossRef] [PubMed]
- Giwnewer, U.; Rubin, G.; Friedman, A.; Rozen, N. User Assessment of a Novel Suspension for a Wheelchair—A Prospective, Randomized, Double Blind Trial. Geriatr. Orthop. Surg. Rehabil. 2020, 11, 2151459320983268. [Google Scholar] [CrossRef] [PubMed]
- Dzierżck, K.; Buczyłowski, A.; Kamieński, K.; Rółkowski, P.; Tylman, I.; Rećko, M.; Ostaszewski, M.; Turycz, P. Design and Static Tests of an All-Terrain Suspension System for Electric Wheelchair. In Proceedings of the 2018 International Conference BIOMDLORE, Bialystok, Poland, 28–30 June 2018; pp. 1–5. [Google Scholar]
- Hostens, I.; Papaioannou, Y.; Spaepen, A.; Ramon, H. A Study of Vibration Characteristics on a Luxury Wheelchair and a New Prototype Wheelchair. J. Sound Vib. 2003, 266, 443–452. [Google Scholar] [CrossRef]
- Cooper, R.A. A Perspective on the Ultralight Wheelchair Revolution. Technol. Disabil. 1996, 5, 383–392. [Google Scholar] [CrossRef]
- Gebrosky, B.; Grindle, G.; Cooper, R.; Cooper, R. Comparison of Carbon Fibre and Aluminium Materials in the Construction of Ultralight Wheelchairs. Disabil. Rehabil. Assist. Technol. 2020, 15, 432–441. [Google Scholar] [CrossRef] [PubMed]
- Worobey, L.A.; Bernstein, J.; Ott, J.; Berner, T.; Black, J.; Cabarle, M.; Roesler, T.; Scarborough, S.; Betz, K. RESNA Position on the Application of Ultralight Manual Wheelchairs. Assist. Technol. 2023, 0, 1–18. [Google Scholar] [CrossRef] [PubMed]
- PN-EN ISO 5349-1:2004; Measurement and Determination of Human Exposure to Vibrations Transmitted by the Upper Limbs—Part 1: General Requirements. ISO: Geneva, Switzerland, 2004.
- Wieczorek, B.; Warguła, Ł. Problems of Dynamometer Construction for Wheelchairs and Simulation of Push Motion. MATEC Web Conf. 2019, 254, 01006. [Google Scholar] [CrossRef]
- Requejo, P.S. Effect of Rear Suspension and Speed on Seat Forces and Head Accelerations Experienced by Manual Wheelchair Riders with Spinal Cord Injury. J. Rehabil. Res. Dev. 2008, 45, 985–996. [Google Scholar] [CrossRef]
- Hans, S.; Ibraim, E.; Pernot, S.; Boutin, C.; Lamarque, C.-H. Damping Identification in Multi-Degree-of-Freedom System via a Wavelet-Logarithmic Decrement—Part 2: Study of a Civil Engineering Building. J. Sound Vib. 2000, 235, 375–403. [Google Scholar] [CrossRef]
- Lariviere, O.; Chadefaux, D.; Sauret, C.; Thoreux, P. Vibration Transmission during Manual Wheelchair Propulsion: A Systematic Review. Vibration 2021, 4, 444–481. [Google Scholar] [CrossRef]
- Requejo, P.; Maneekobkunwong, S.; McNitt-Gray, J.; Adkins, R.; Waters, R. Influence of Hand-Rim Wheelchairs with Rear Suspension on Seat Forces and Head Acceleration during Curb Descent Landings. J. Rehabil. Med. 2009, 41, 459–466. [Google Scholar] [CrossRef]
- Chénier, F.; Aissaoui, R. Effect of Wheelchair Frame Material on Users’ Mechanical Work and Transmitted Vibration. BioMed Res. Int. 2014, 2014, e609369. [Google Scholar] [CrossRef]
- Yilmazcoban, I.K.; Mimaroglu, A. Frontal Impact Absorbing Systems in Wheelchairs like Sheet Metal Hood in Vehicles. Thin-Walled Struct. 2012, 59, 20–26. [Google Scholar] [CrossRef]
- DiGiovine, C.P.; Cooper, R.A.; Fitzgerald, S.G.; Boninger, M.L.; Wolf, E.J. Songfeng Guo Whole-Body Vibration during Manual Wheelchair Propulsion with Selected Seat Cushions and Back Supports. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 311–322. [Google Scholar] [CrossRef]
- Cooper, R.A.; Wolf, E.; Fitzgerald, S.G.; Boninger, M.L.; Ulerich, R.; Ammer, W.A. Seat and Footrest Shocks and Vibrations in Manual Wheelchairs with and without Suspension. Arch. Phys. Med. Rehabil. 2003, 84, 96–102. [Google Scholar] [CrossRef] [PubMed]
- Rantaharju, T.; Mansfield, N.J.; Ala-Hiiro, J.M.; Gunston, T.P. Predicting the Health Risks Related to Whole-Body Vibration and Shock: A Comparison of Alternative Assessment Methods for High-Acceleration Events in Vehicles. Ergonomics 2015, 58, 1071–1087. [Google Scholar] [CrossRef] [PubMed]
- Eiband, A.M. Human Tolerance to Rapidly Applied Accelerations: A Summary of the Literature; NASA: Washington, DC, USA, 1959. [Google Scholar]
- Little, J.A.; Mann, B.P. Optimizing Logarithmic Decrement Damping Estimation through Uncertainty Propagation. J. Sound Vib. 2019, 457, 368–376. [Google Scholar] [CrossRef]
- Jeon, E.-B.; Ahn, S.; Lee, I.-G.; Koh, H.-I.; Park, J.; Kim, H.-S. Investigation of Mechanical/Dynamic Properties of Carbon Fiber Reinforced Polymer Concrete for Low Noise Railway Slab. Compos. Struct. 2015, 134, 27–35. [Google Scholar] [CrossRef]
- Szpica, D. Validation of Indirect Methods Used in the Operational Assessment of LPG Vapor Phase Pulse Injectors. Measurement 2018, 118, 253–261. [Google Scholar] [CrossRef]
- Świć, A.; Gola, A.; Orynycz, O.; Tucki, K.; Matijošius, J. Technological Methods for Controlling the Elastic-Deformable State in Turning and Grinding Shafts of Low Stiffness. Materials 2022, 15, 5265. [Google Scholar] [CrossRef]
- Žvirblis, T.; Vainorius, D.; Matijošius, J.; Kilikevičienė, K.; Rimkus, A.; Bereczky, Á.; Lukács, K.; Kilikevičius, A. Engine Vibration Data Increases Prognosis Accuracy on Emission Loads: A Novel Statistical Regressions Algorithm Approach for Vibration Analysis in Time Domain. Symmetry 2021, 13, 1234. [Google Scholar] [CrossRef]
- Sawczuk, W.; Ulbrich, D.; Kowalczyk, J.; Merkisz-Guranowska, A. Evaluation of Wear of Disc Brake Friction Linings and the Variability of the Friction Coefficient on the Basis of Vibroacoustic Signals. Sensors 2021, 21, 5927. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variant Denotation | WA | WCK | WCBK |
|---|---|---|---|
 |  |  | |
| Driving wheel | pneumatic, 36 spokes, pressure 5 bar, diameter 24” | pneumatic, 36 spokes, pressure 5 bar, diameter 24” | pneumatic, 36 spokes, pressure 5 bar, diameter 24” |
| Caster wheel | full, diameter 4” | full, diameter 4” | full, diameter 4” |
| Seat cushion | pneumatic—Prevent Classic (AR-093) | pneumatic—Prevent Classic (AR-093) | pneumatic—Prevent Classic (AR-093) |
| Frame material | aluminum frame | carbon fiber frame | carbon fiber frame |
| Seat design | classic on stripes | bucket | classic on stripes |
| Overall mass | 11.6 kg | 8.2 kg | 7.8 kg |
| Model; manufacturer | Aviator; MTB Poland, Łódź, Poland | Freeasy Bucket; Cosmotech LLC, Bytom, Poland | Freeasy Classic; Cosmotech LLC, Bytom, Poland |
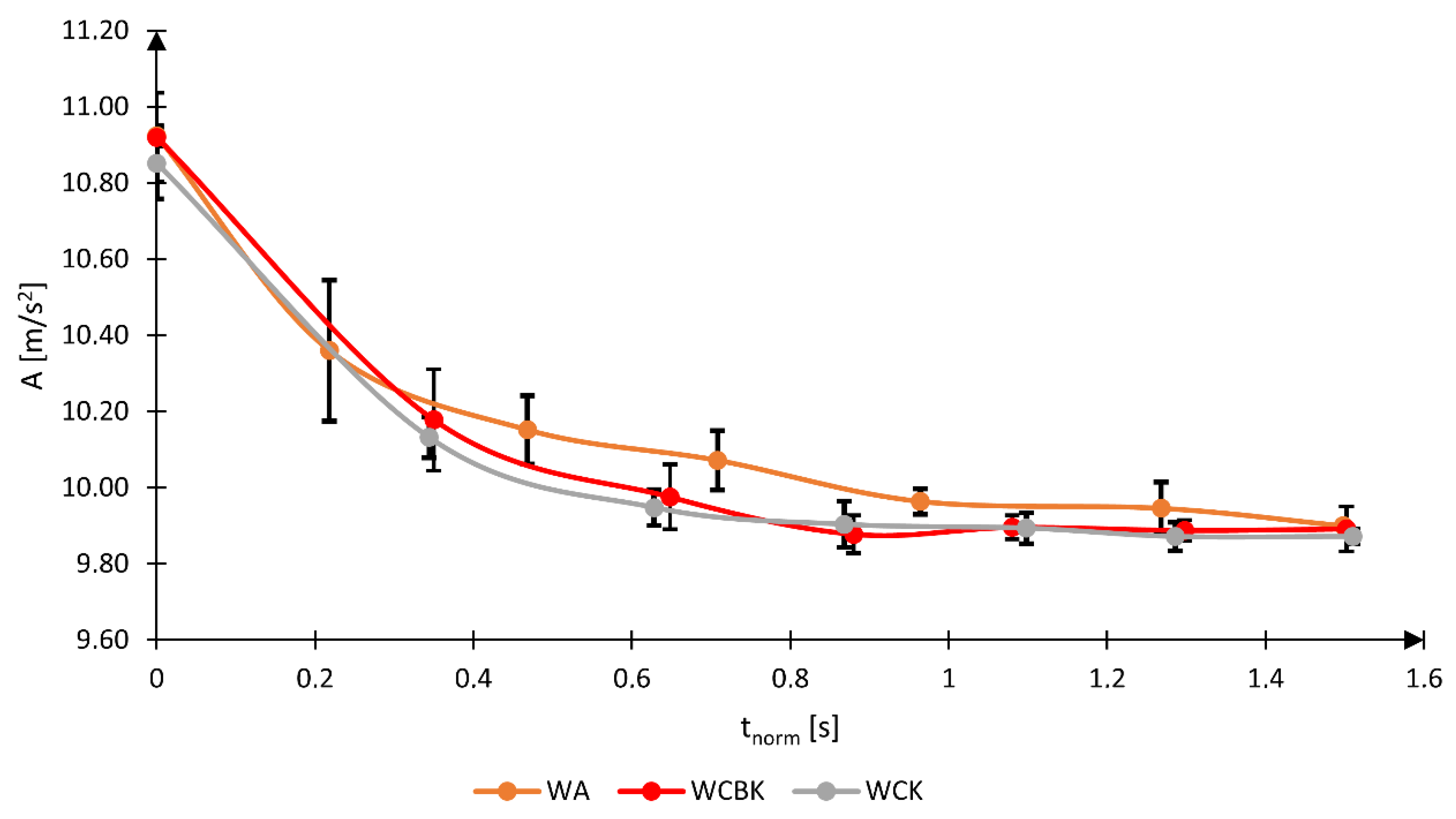
| WA | WCBK | WCK | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| n | T | tnorm | A | ± | T | tnorm | A | ± | T | tnorm | A | ± |
| (s) | (s) | (m/s2) | (m/s2) | (s) | (s) | (m/s2) | (m/s2) | (s) | (s) | (m/s2) | (m/s2) | |
| 0.250 ± 0.031 | 0 | 10.92 | 0.03 | 0.250 ± 0.063 | 0 | 10.92 | 0.12 | 0.252 ± 0.057 | 0 | 10.85 | 0.09 | |
| 1 | 0.218 | 10.36 | 0.19 | 0.350 | 10.18 | 0.13 | 0.344 | 10.13 | 0.05 | |||
| 2 | 0.468 | 10.15 | 0.09 | 0.648 | 9.98 | 0.09 | 0.628 | 9.95 | 0.05 | |||
| 3 | 0.708 | 10.07 | 0.08 | 0.880 | 9.88 | 0.05 | 0.868 | 9.90 | 0.06 | |||
| 4 | 0.964 | 9.96 | 0.03 | 1.080 | 9.90 | 0.03 | 1.098 | 9.89 | 0.04 | |||
| 5 | 1.268 | 9.95 | 0.07 | 1.298 | 9.89 | 0.03 | 1.286 | 9.87 | 0.04 | |||
| 6 | 1.498 | 9.90 | 0.01 | 1.502 | 9.89 | 0.06 | 1.510 | 9.87 | 0.02 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wieczorek, B.; Warguła, Ł.; Adamiec, J.; Sowa, T.; Padjasek, M.; Padjasek, Ł.; Sydor, M. Investigating the Impact of Carbon Fiber as a Wheelchair Frame Material on Its Ability to Dissipate Kinetic Energy and Reduce Vibrations. Materials 2024, 17, 641. https://doi.org/10.3390/ma17030641
Wieczorek B, Warguła Ł, Adamiec J, Sowa T, Padjasek M, Padjasek Ł, Sydor M. Investigating the Impact of Carbon Fiber as a Wheelchair Frame Material on Its Ability to Dissipate Kinetic Energy and Reduce Vibrations. Materials. 2024; 17(3):641. https://doi.org/10.3390/ma17030641
Chicago/Turabian StyleWieczorek, Bartosz, Łukasz Warguła, Jarosław Adamiec, Tomasz Sowa, Michał Padjasek, Łukasz Padjasek, and Maciej Sydor. 2024. "Investigating the Impact of Carbon Fiber as a Wheelchair Frame Material on Its Ability to Dissipate Kinetic Energy and Reduce Vibrations" Materials 17, no. 3: 641. https://doi.org/10.3390/ma17030641
APA StyleWieczorek, B., Warguła, Ł., Adamiec, J., Sowa, T., Padjasek, M., Padjasek, Ł., & Sydor, M. (2024). Investigating the Impact of Carbon Fiber as a Wheelchair Frame Material on Its Ability to Dissipate Kinetic Energy and Reduce Vibrations. Materials, 17(3), 641. https://doi.org/10.3390/ma17030641