A New Meta-Heuristics of Optimization with Dynamic Adaptation of Parameters Using Type-2 Fuzzy Logic for Trajectory Control of a Mobile Robot




Abstract
:1. Introduction
2. Related Work
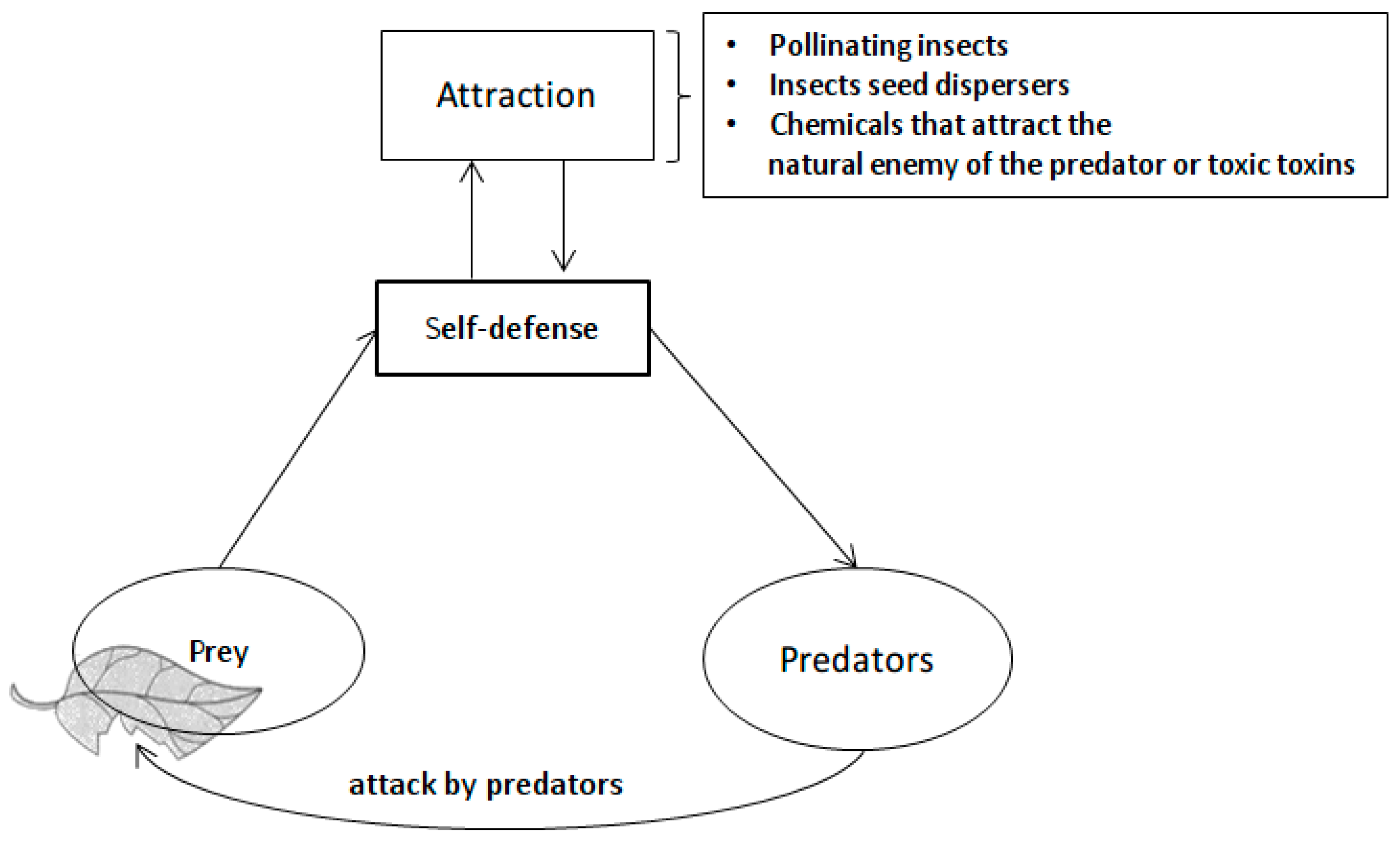
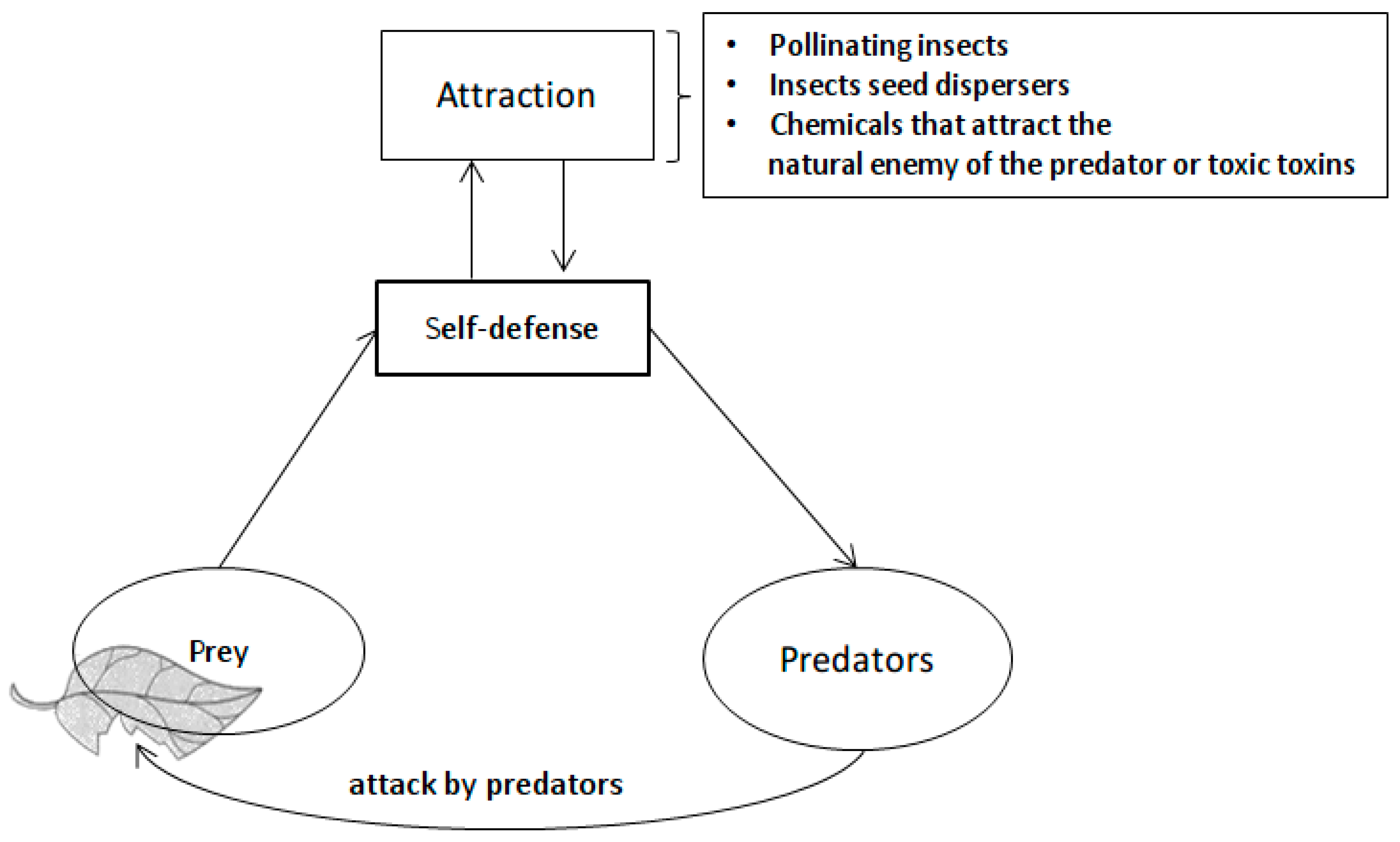
3. Self-Defense of the Plants
4. The Predator Prey Model
- x is the number of prey (for example plants).
- y is the number of some type of predator (for example, insects).
- and represent the growth rates of the two populations over time.
- t represents time.
- α measures the birth rate of the plants in the absence of predators.
- β measures the death rate of the predators in the absence of plants.
- δ represents the susceptibility of plants.
- λ represents the ability of predation.
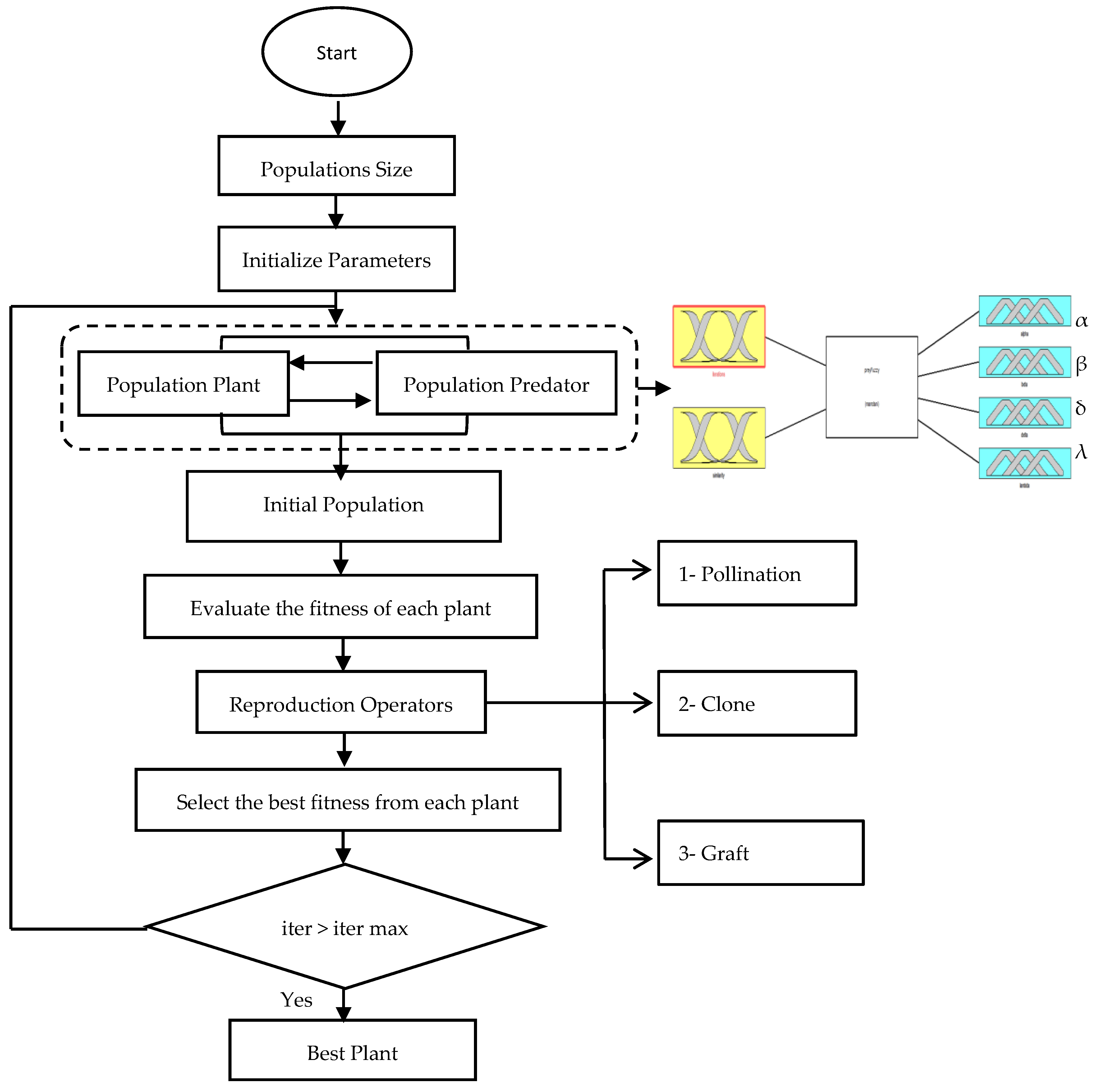
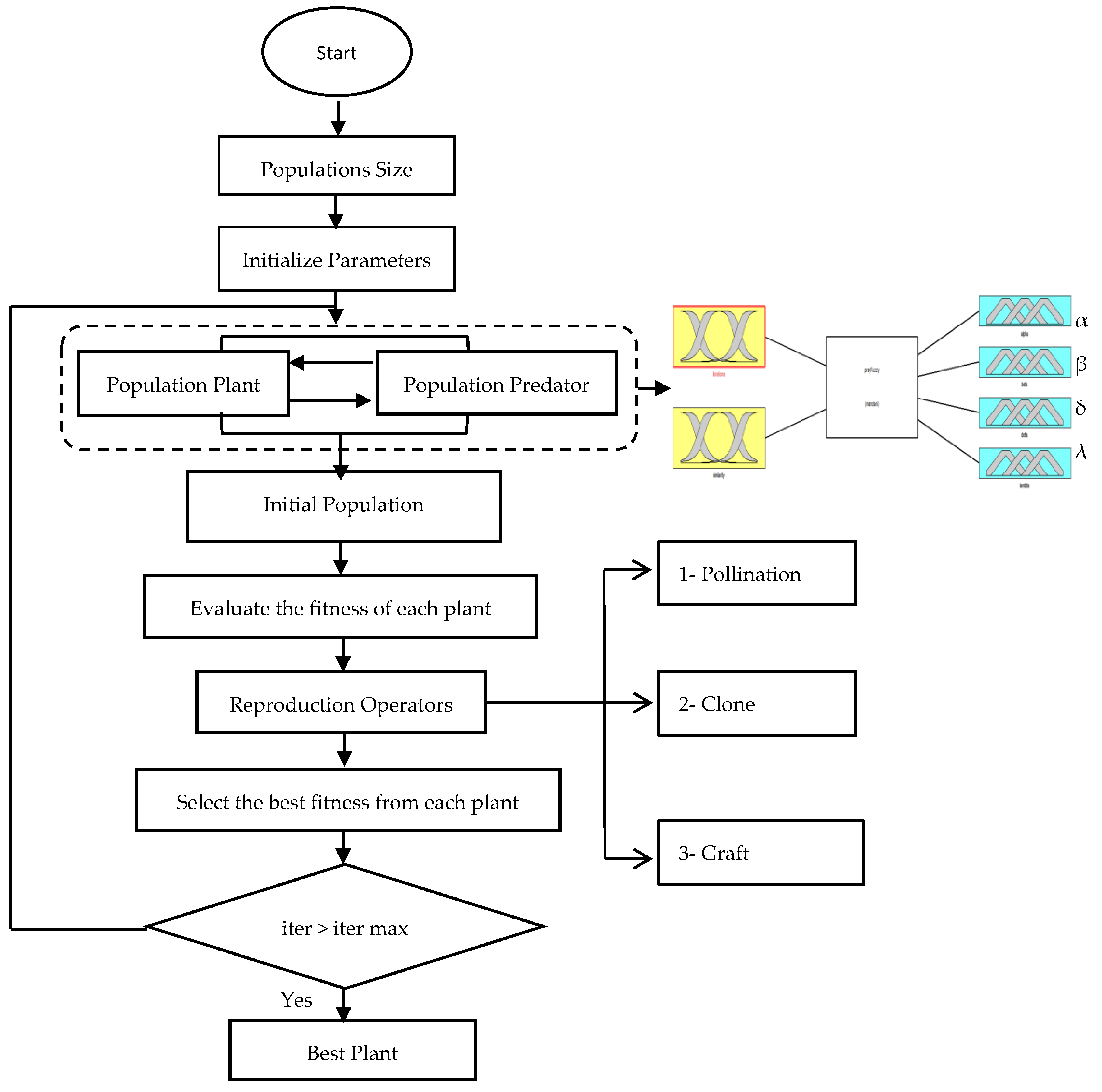
5. Proposed Method
- Count the number of members which are similar between both populations.
- Count the total number of members in both populations. (Similar and no-similar).
- Divide the number of similar members (1) by the total number of members (2).
- Multiply the number you found in (3) by 100.
5.1. Problem to Be Optimized
- is the vector of the configuration coordinates,
- is the vector of velocities,
- is the vector of torques applied to the wheels of the robot where and denote the torques of the right and left wheel,
- is the uniformly bounded disturbance vector,
- is the positive-definite inertia matrix,
- is the vector of centripetal and Coriolis forces, and
- is a diagonal positive-definite damping matrix.
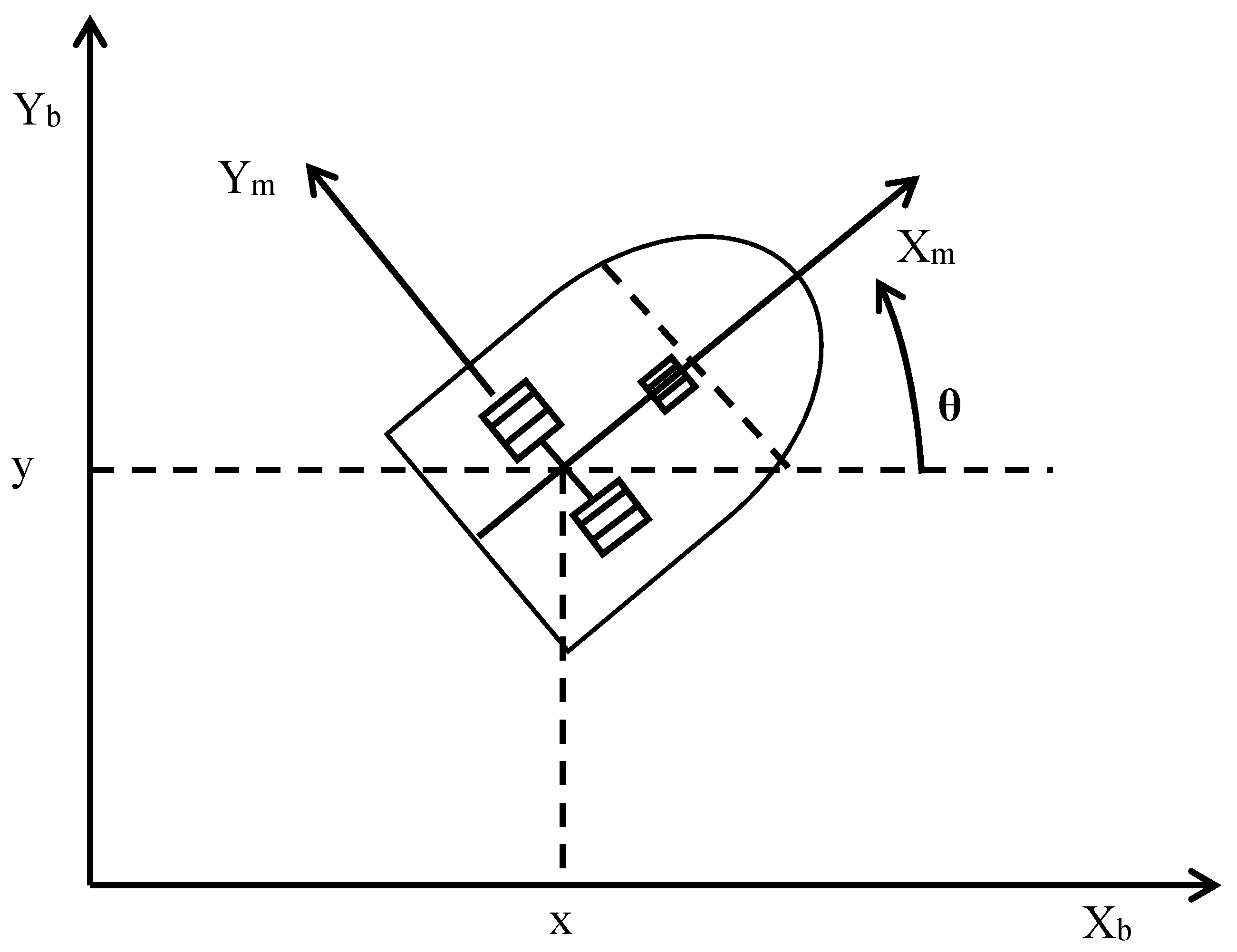
- is the position in the X–Y (world) reference frame,
- is the angle between the heading direction and the -axis, and
- and are the linear and angular velocities.
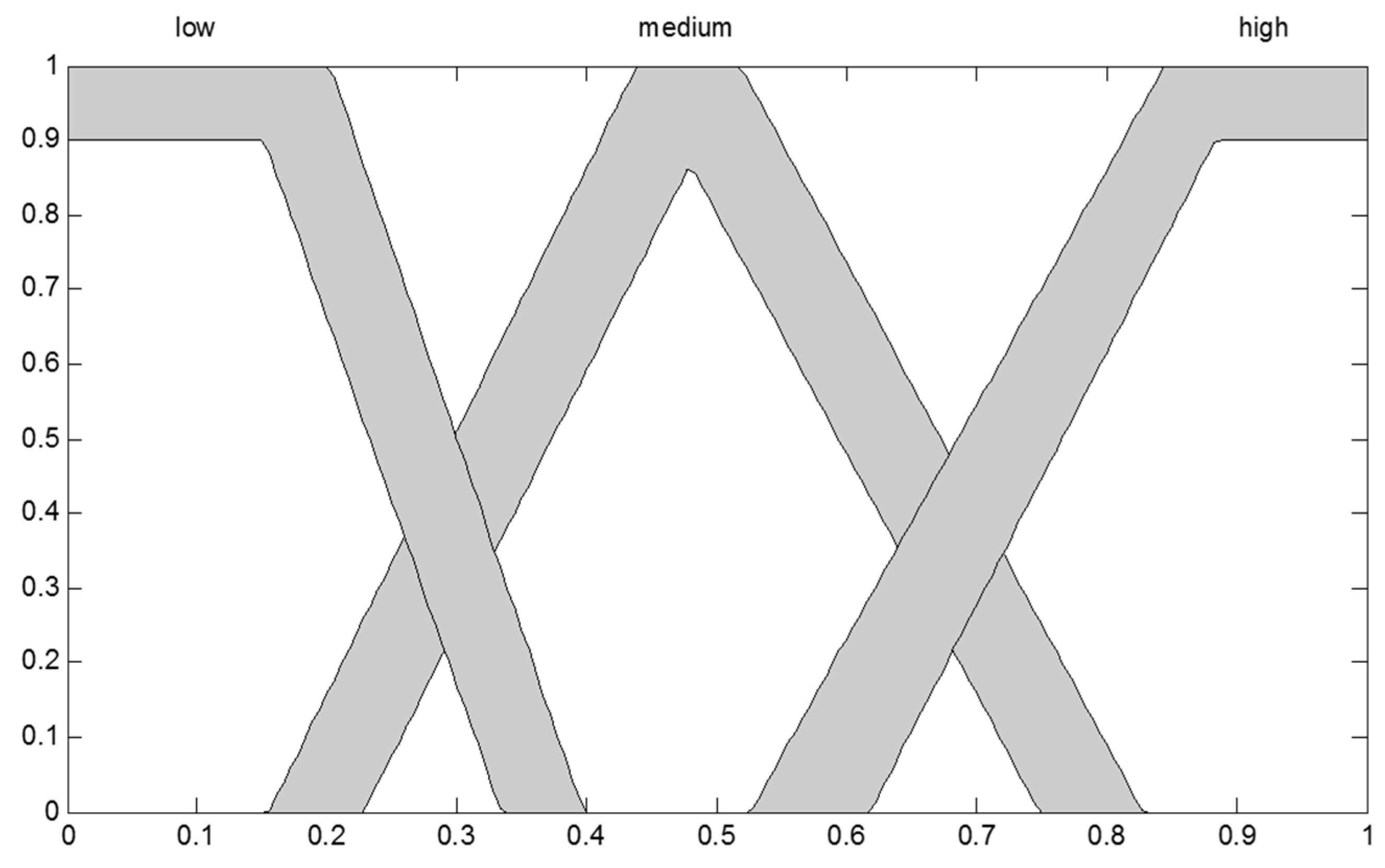
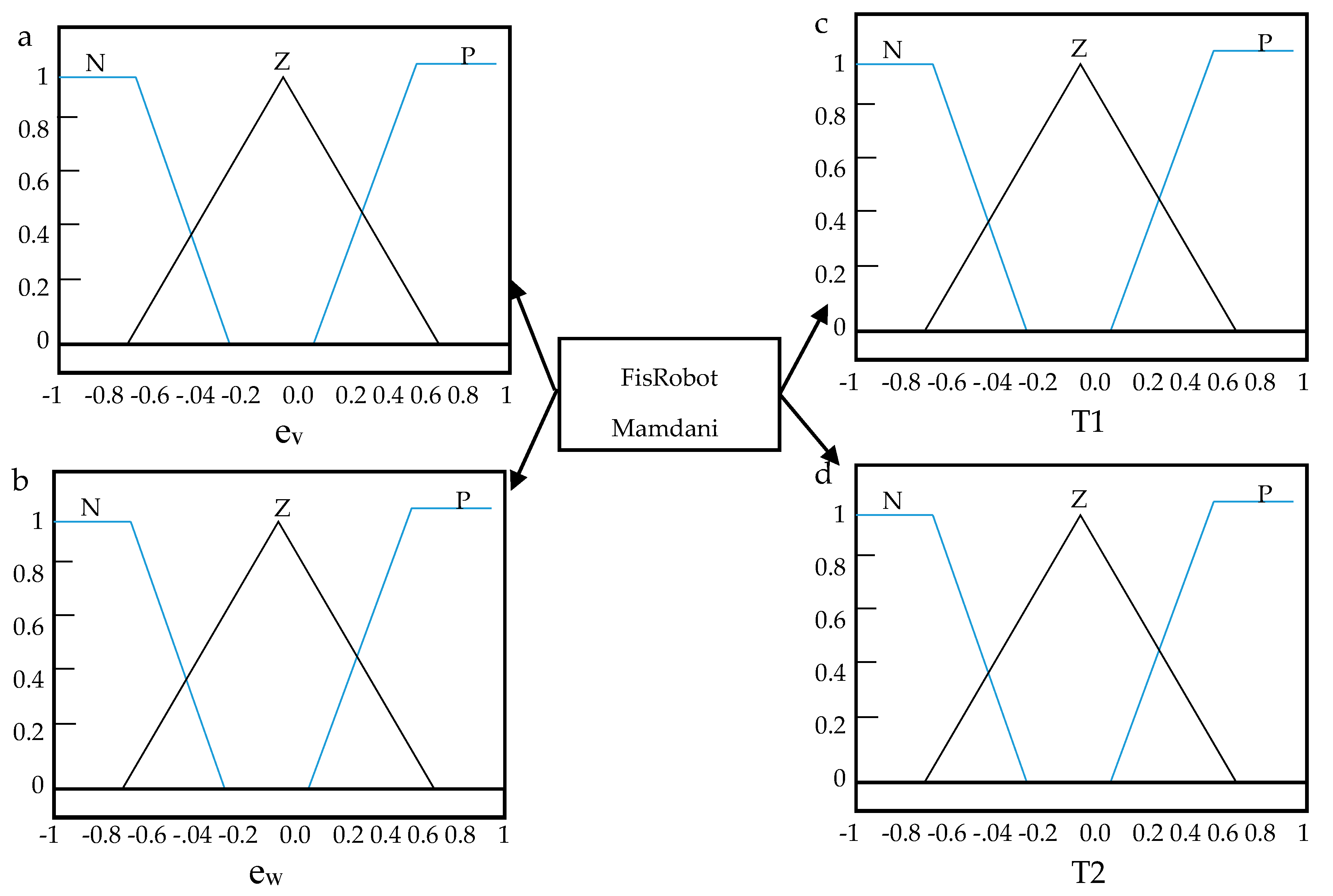
5.2. Characteristics of the Fuzzy Controller Used for the Robot
- If (ev is N) and (ew is N) then (T1 is N) (T2 is N).
- If (ev is N) and (ew is Z) then (T1 is N) (T2 is Z).
- If (ev is N) and (ew is P) then (T1 is N) (T2 is P).
- If (ev is Z) and (ew is N) then (T1 is Z) (T2 is N).
- If (ev is Z) and (ew is Z) then (T1 is Z) (T2 is Z).
- If (ev is Z) and (ew is P) then (T1 is Z) (T2 is P).
- If (ev is P) and (ew is N) then (T1 is P) (T2 is N).
- If (ev is P) and (ew is Z) then (T1 is P) (T2 is Z).
- If (ev is P) and (ew is P) then (T1 is P) (T2 is P).
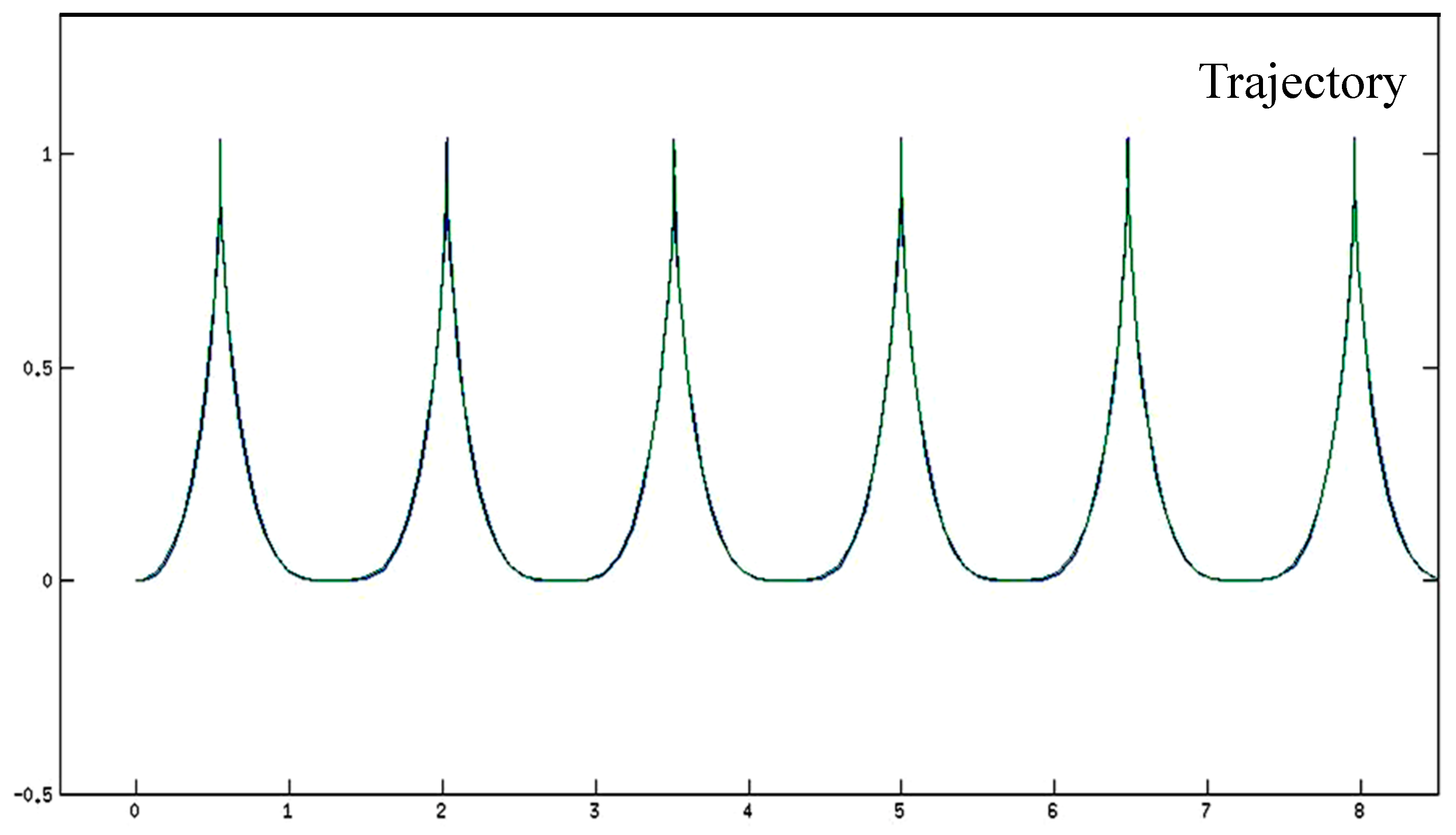
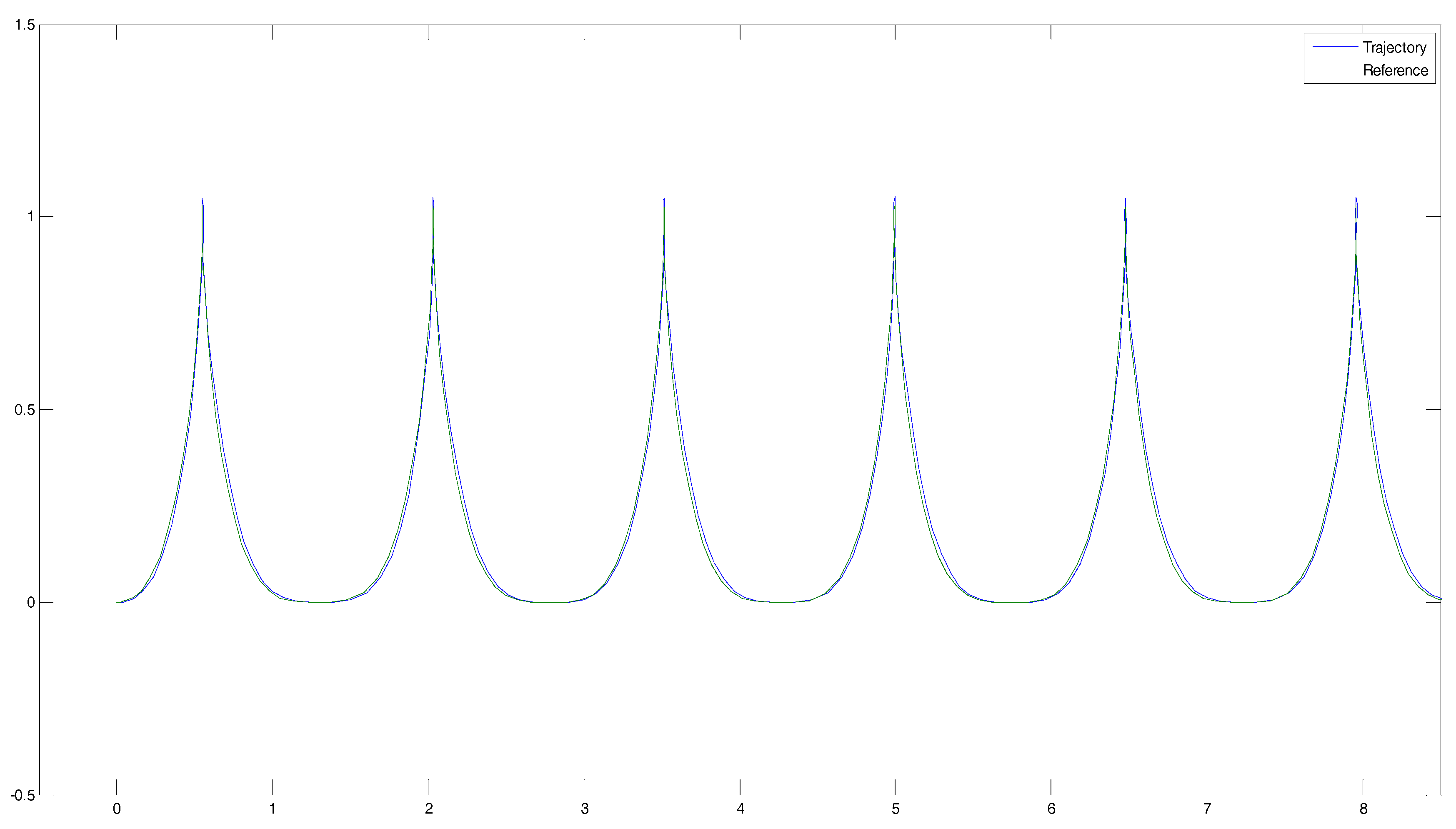
6. Results Obtained
Statistical Comparison
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Caraveo, C.; Valdez, F.; Castillo, O. Optimization of fuzzy controller design using a new bee colony algorithm with fuzzy dynamic parameter adaptation. Appl. Soft Comput. 2016, 43, 131–142. [Google Scholar] [CrossRef]
- Precup, R.E.; David, R.C.; Petriu, E.M.; Preitl, S.; Rădac, M.B. Novel adaptive charged system search algorithm for optimal tuning of fuzzy controllers. Expert Syst. Appl. 2014, 41, 1168–1175. [Google Scholar] [CrossRef]
- Kıran, M.S.; Fındık, O. A directed artificial bee colony algorithm. Appl. Soft Comput. 2015, 26, 454–462. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Soria, J. Fuzzy differential evolution method with dynamic parameter adaptation using type-2 fuzzy logic. In Proceedings of the 2016 IEEE 8th International Conference on Intelligent Systems (IS), Sofia, Bulgaria, 4–6 September 2016; pp. 113–118. [Google Scholar]
- Olivas, F.; Valdez, F.; Castillo, O. Dynamic parameter adaptation in Ant Colony Optimization using a fuzzy system for TSP problems. In Proceedings of the 16th World Congress of the International Fuzzy Systems Association and the 9th Conference of the European Society for Fuzzy Logic and Technology (IFSA-EUSFLAT), Gijon, Spain, 30 June–3 July 2015; pp. 765–770. [Google Scholar]
- Zi, B.; Sun, H.; Zhang, D. Design, analysis and control of a winding hybrid-driven cable parallel manipulator. Robot. Comput.-Integr. Manuf. 2017, 48, 196–208. [Google Scholar] [CrossRef]
- Zi, B.; Zhu, Z.C.; Du, J.L. Analysis and control of the cable-supporting system including actuator dynamics. Control Eng. Pract. 2011, 19, 491–501. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Castillo, O. Comparative study of bio-inspired algorithms applied in the design of fuzzy controller for the water tank. In Recent Developments and New Direction in Soft-Computing Foundations and Applications; Springer: Cham, Switzerland, 2016; pp. 419–438. [Google Scholar]
- Amador-Angulo, L.; Mendoza, O.; Castro, J.R.; Rodríguez-Díaz, A.; Melin, P.; Castillo, O. Fuzzy Sets in Dynamic Adaptation of Parameters of a Bee Colony Optimization for Controlling the Trajectory of an Autonomous Mobile Robot. Sensors 2016, 16, 1458. [Google Scholar] [CrossRef] [PubMed]
- Harmanani, H.M.; Drouby, F.; Ghosn, S.B. A parallel genetic algorithm for the open-shop scheduling problem using deterministic and random moves. In Proceedings of the 2009 Spring Simulation Multiconference, San Diego, CA, USA, 22–27 March 2009; Society for Computer Simulation International: San Diego, CA, USA, 2009; p. 30. [Google Scholar]
- Debbarma, S.; Saikia, L.C.; Sinha, N. Solution to automatic generation control problem using firefly algorithm optimized IλDµ controller. ISA Trans. 2014, 53, 358–366. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.S. Multiobjective firefly algorithm for continuous optimization. Eng. Comput. 2013, 29, 175–184. [Google Scholar] [CrossRef]
- Yang, X.S.; Hosseini, S.S.S.; Gandomi, A.H. Firefly algorithm for solving non-convex economic dispatch problems with valve loading effect. Appl. Soft Comput. 2012, 12, 1180–1186. [Google Scholar] [CrossRef]
- Johanyák, Z.C.; Papp, O. A hybrid algorithm for parameter tuning in fuzzy model identification. Acta Polytech. Hung. 2012, 9, 153–165. [Google Scholar]
- Silva, A.; Neves, A.; Costa, E. An empirical comparison of particle swarm and predator prey optimisation. In Irish Conference on Artificial Intelligence and Cognitive Science; Springer: Berlin/Heidelberg, Germany, 2002; pp. 103–110. [Google Scholar]
- Xiao, Y.; Chen, L. Modeling and analysis of a predator-prey model with disease in the prey. Math. Biosci. 2001, 171, 59–82. [Google Scholar] [CrossRef]
- Barraza, J.; Melin, P.; Valdez, F.; Gonzalez, C.I. Fuzzy FWA with dynamic adaptation of parameters. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, Canada, 24–29 July 2016; pp. 4053–4060. [Google Scholar]
- Gaxiola, F.; Melin, P.; Valdez, F.; Castro, J.R.; Castillo, O. Optimization of type-2 fuzzy weights in backpropagation learning for neural networks using GAs and PSO. Appl. Soft Comput. 2016, 38, 860–871. [Google Scholar] [CrossRef]
- Olivas, F.; Valdez, F.; Castillo, O.; Gonzalez, C.I.; Martinez, G.; Melin, P. Ant colony optimization with dynamic parameter adaptation based on interval type-2 fuzzy logic systems. Appl. Soft Comput. 2017, 53, 74–87. [Google Scholar] [CrossRef]
- Peraza, C.; Valdez, F.; Garcia, M.; Melin, P.; Castillo, O. A New Fuzzy Harmony Search Algorithm Using Fuzzy Logic for Dynamic Parameter Adaptation. Algorithms 2016, 9, 69. [Google Scholar] [CrossRef]
- Pérez, J.; Valdez, F.; Castillo, O. Modification of the bat algorithm using type-2 fuzzy logic for dynamical parameter adaptation. In Nature-Inspired Design of Hybrid Intelligent Systems; Springer: Cham, Switzerland, 2017; pp. 343–355. [Google Scholar]
- Koornneef, A.; Pieterse, C.M. Cross talk in defense signaling. Plant Physiol. 2008, 146, 839–844. [Google Scholar] [CrossRef] [PubMed]
- Song, G.C.; Ryu, C.M. Two volatile organic compounds trigger plant self-defense against a bacterial pathogen and a sucking insect in cucumber under open field conditions. Int. J. Mol. Sci. 2013, 14, 9803–9819. [Google Scholar] [CrossRef] [PubMed]
- Caraveo, C.; Valdez, F.; Castillo, O.; Melin, P. A new metaheuristic based on the self-defense techniques of the plants in nature. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–5. [Google Scholar]
- Melin, P.; Castillo, O.; Gonzalez, C.I.; Castro, J.R.; Mendoza, O. General Type-2 fuzzy edge detectors applied to face recognition systems. In Proceedings of the 2016 Annual Conference of the North American Fuzzy Information Processing Society (NAFIPS), El Paso, TX, USA, 31 October–4 November 2016; pp. 1–6. [Google Scholar]
- González, C.I.; Castro, J.R.; Martínez, G.E.; Melin, P.; Castillo, O. A new approach based on generalized type-2 fuzzy logic for edge detection. In Proceedings of the 2013 Joint IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), Edmonton, AB, Canada, 24–28 June 2013; pp. 424–429. [Google Scholar]
- González, C.I.; Melin, P.; Castro, J.R.; Castillo, O.; Mendoza, O. Optimization of interval type-2 fuzzy systems for image edge detection. Appl. Soft Comput. 2016, 47, 631–643. [Google Scholar] [CrossRef]
- Perez, J.; Valdez, F.; Castillo, O.; Roeva, O. Bat algorithm with parameter adaptation using interval type-2 fuzzy logic for benchmark mathematical functions. In Proceedings of the 2016 IEEE 8th International Conference on Intelligent Systems (IS), Sofia, Bulgaria, 4–6 September 2016; pp. 120–127. [Google Scholar]
- Perez, J.; Valdez, F.; Castillo, O.; Melin, P.; Gonzalez, C.; Martinez, G. Interval type-2 fuzzy logic for dynamic parameter adaptation in the bat algorithm. Soft Comput. 2017, 21, 667–685. [Google Scholar] [CrossRef]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multiobjective optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef]
- Singla, J. Comparative study of Mamdani-type and Sugeno-type fuzzy inference systems for diagnosis of diabetes. In Proceedings of the 2015 International Conference on Advances in Computer Engineering and Applications (ICACEA), Ghaziabad, India, 19–20 March 2015; pp. 517–522. [Google Scholar]
- Barbosa, A.M. fuzzySim: Applying fuzzy logic to binary similarity indices in ecology. Methods Ecol. Evol. 2015, 6, 853–858. [Google Scholar] [CrossRef]
- Gupta, A.K.; Sardana, N. Significance of clustering coefficient over jaccard index. In Proceedings of the 2015 Eighth International Conference on Contemporary Computing (IC3), Noida, India, 20–22 August 2015; pp. 463–466. [Google Scholar]
- Ramli, N.; Mohamad, D. Fuzzy evaluation based on Jaccard with degree of optimism ranking index. In Proceedings of the 2010 International Conference on Science and Social Research (CSSR), Kuala Lumpur, Malaysia, 5–7 December 2010; pp. 970–974. [Google Scholar]
- Shi, R.; Ngan, K.N.; Li, S. Jaccard index compensation for object segmentation evaluation. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 4457–4461. [Google Scholar]
- Melin, P.; Olivas, F.; Castillo, O.; Valdez, F.; Soria, J.; Valdez, M. Optimal design of fuzzy classification systems using PSO with dynamic parameter adaptation through fuzzy logic. Expert Syst. Appl. 2013, 40, 3196–3206. [Google Scholar] [CrossRef]
- Teodorović, D. Bee colony optimization (BCO). In Innovations in Swarm Intelligence; Lim, C.P., Jain, L.C., Dehuri, S., Eds.; Springer: Heidelberg/Berlin, Germany, 2009; pp. 39–60. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Populations | |||||||
|---|---|---|---|---|---|---|---|---|
| N | Iter | α | β | δ | λ | Prey | Predator | Values |
| 1 | 50 | Dynamic with Interval Type-2 FLS | 300 | 200 | 7.67 × 10−2 | |||
| 2 | 50 | 300 | 200 | 1.76 × 10−2 | ||||
| 3 | 50 | 300 | 200 | 1.12 × 10−2 | ||||
| 4 | 50 | 300 | 200 | 7.76 × 10−2 | ||||
| 5 | 50 | 300 | 200 | 7.67 × 10−2 | ||||
| 6 | 50 | 300 | 200 | 1.54 × 10−2 | ||||
| 7 | 50 | 300 | 200 | 1.54 × 10−2 | ||||
| 8 | 50 | 300 | 200 | 9.62 × 10−3 | ||||
| 9 | 50 | 300 | 200 | 8.25 × 10−5 | ||||
| 10 | 50 | 300 | 200 | 2.08 × 10−3 | ||||
| 11 | 50 | 300 | 200 | 1.77 × 10−3 | ||||
| 12 | 50 | 300 | 200 | 2.17 × 10−2 | ||||
| 13 | 50 | 300 | 200 | 3.09 × 10−2 | ||||
| 14 | 50 | 300 | 200 | 3.38 × 10−2 | ||||
| 15 | 50 | 300 | 200 | 1.05 × 10−2 | ||||
| 16 | 50 | 300 | 200 | 1.69 × 10−2 | ||||
| 17 | 50 | 300 | 200 | 3.54 × 10−2 | ||||
| 18 | 50 | 300 | 200 | 2.79 × 10−2 | ||||
| 19 | 50 | 300 | 200 | 5.22 × 10−3 | ||||
| 20 | 50 | 300 | 200 | 1.56 × 10−2 | ||||
| 21 | 50 | 300 | 200 | 1.25 × 10−2 | ||||
| 22 | 50 | 300 | 200 | 3.82 × 10−3 | ||||
| 23 | 50 | 300 | 200 | 1.82 × 10−2 | ||||
| 24 | 50 | 300 | 200 | 2.27 × 10−3 | ||||
| 25 | 50 | 300 | 200 | 7.27 × 10−3 | ||||
| 26 | 50 | 300 | 200 | 3.70 × 10−3 | ||||
| 27 | 50 | 300 | 200 | 6.93 × 10−4 | ||||
| 28 | 50 | 300 | 200 | 2.02 × 10−2 | ||||
| 29 | 50 | 300 | 200 | 4.25 × 10−3 | ||||
| 30 | 50 | 300 | 200 | 6.93 × 10−4 | ||||
| Average: | 1.919 × 10−2 | |||||||
| σ: | 2.20 × 10−2 | |||||||
| Best: | 8.25 × 10−5 | |||||||
| Worst: | 7.76 × 10−2 | |||||||
| Parameters | Values |
|---|---|
| Level of significance | 95% |
| Alpha | 0.05% |
| Ha | µ1 < µ2 |
| H0 | µ1 ≥ µ2 |
| Critical Value | −1.645 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caraveo, C.; Valdez, F.; Castillo, O. A New Meta-Heuristics of Optimization with Dynamic Adaptation of Parameters Using Type-2 Fuzzy Logic for Trajectory Control of a Mobile Robot. Algorithms 2017, 10, 85. https://doi.org/10.3390/a10030085
Caraveo C, Valdez F, Castillo O. A New Meta-Heuristics of Optimization with Dynamic Adaptation of Parameters Using Type-2 Fuzzy Logic for Trajectory Control of a Mobile Robot. Algorithms. 2017; 10(3):85. https://doi.org/10.3390/a10030085
Chicago/Turabian StyleCaraveo, Camilo, Fevrier Valdez, and Oscar Castillo. 2017. "A New Meta-Heuristics of Optimization with Dynamic Adaptation of Parameters Using Type-2 Fuzzy Logic for Trajectory Control of a Mobile Robot" Algorithms 10, no. 3: 85. https://doi.org/10.3390/a10030085
APA StyleCaraveo, C., Valdez, F., & Castillo, O. (2017). A New Meta-Heuristics of Optimization with Dynamic Adaptation of Parameters Using Type-2 Fuzzy Logic for Trajectory Control of a Mobile Robot. Algorithms, 10(3), 85. https://doi.org/10.3390/a10030085