1. Introduction
Hybrid electric vehicles (HEVs) are regarded as an energy-saving solution in the vehicle industry. An energy management strategy (EMS) that coordinates the output power from an internal combustion engine (ICE) and an electric motor simultaneously is important for a HEV because EMSs affect fuel economy and battery state of charge (SOC) directly.
Many approaches have been taken to EMS, from effective but vehicle design sensitive rule-based strategies [
1] to optimal control choices [
2]. The global optimal solutions can be obtained based on a Pontryagin’s minimum principle (PMP) under reasonable assumptions [
3]. However, the global optimal solution for a realistic vehicle problem suffers from two disadvantages: requiring complete knowledge of a drive cycle in advance, and the heavy computational burden induced by too large state space and control space. The most famous global optimal control law is based on a Bellman optimality principle [
4]. A typical EMS of this kind is the dynamic programming (DP) approach, which is often utilized in two aspects. The first is to evaluate other algorithms; the second is to analyze vehicle control laws, extract implementable rules in controls (e.g., transitioning between different operating modes and gear shift sequences), and improve rule-based methods [
5]. We can infer that the DP-based global optimal solution is driving cycle sensitive. To enhance the robustness of an EMS method to the driving cycle sensitive problem, a stochastic dynamic programming (SDP) approach in an infinite-horizon form is proposed to solve a future driving cycle with a statistical Markov chain model [
6]. The stochastic approach optimizes the control policy over a broader set of driving patterns: the best policy achieves a minimum of the expected cost, which is an average over all sample paths of the stochastic model. However, the method still has a high computational burden, and relies on the Markov chain model.
With the development of artificial intelligence, some neural network-based approaches have been proposed to relax the driving cycle sensitive problem [
7]. In [
8], a supervised competitive learning vector quantization neural network was used to predict real-time driving patterns. Chaining neural network, multi-layer perceptron model, and convolutional neural networks were all employed to predict velocity with the help of information provided by vehicle-to-vehicle communication technology, vehicle-to-infrastructure communication technology, and other intelligent transportation technologies [
9,
10]. A forecasting velocity was used in an equivalent consumption minimization approach to improve the performance of EMS. In [
11], a PMP-based method was used to obtain optimal control of different driving cycles. A neural network was trained to learn the optimal SOC curves. Then, with the partial trip information provided by the intelligent transportation system, a reference optimal SOC curve was produced by the neural network and used for a fuzzy logic controller. We can conclude that the studies mentioned above usually train one kind of neural network and then use it online to predict some variables (e.g., vehicle velocity, optimal SOC curve, optimal value function, etc.). These methods are still not a real online EMS. In [
12,
13], fully data-driven EMSs based on deep reinforcement learning (DRL) approach were proposed. The DRL-based method needs huge learning samples and significant computational resources. Although an online learning architecture was proposed in [
13], utilizing a real-time ITS system, it was still not applied in a real vehicle. In [
14], a neural dynamic programming (NDP)-based EMS was first proposed. In this NDP, a radial basis function neural network (RBFNN) is adopted both in critic network and action network. However, the RBFNN requires too long a training time for the large network architecture.
This study focuses on developing a near-optimal torque split control strategy for online application potential that will improve the fuel economy and prevent battery degradation without previewing future traffic information. Control using torque instead of power can handle a velocity of zero. This research also investigates a NDP EMS. However, different to [
14], the critic network in this EMS utilizes a multi-resolution wavelet neural network (MRWNN), and the action network adopts a conventional wavelet neural network (CWNN). The CWNN action network does not need clustering preprocessing on the input data, which is essential in the RBFNN action network. Meanwhile, MRWNN benefits from less training time for the dilation and the translation in every activation function being determined in advance, and it is less redundant than RBFNN for orthonormal characteristics—that is, each activation function in the hidden layer is different from each other, and there is no overlap. In the critic network, the MRWNN is based on multi-resolution theory, Meyer scaling, and wavelet functions. The proposed NDP EMS is then applied to the simplest torque-coupling parallel HEV to simulate its performance.
In this paper, the preparation of knowledge on the proposed NDP EMS is presented in
Section 2. This knowledge includes the structure of the studied parallel hybrid powertrain, the EMS optimal control problem to be solved, the topology and training method of the traditional wavelet neural network, the multi-resolution analysis theory for a function, and the topology and training approach for a MRWNN. After that, neuro-dynamic programming based on a MRWNN and a CWNN, and its implementation procedure, is described in
Section 3. In addition, the NDP-based EMS performance of the parallel HEV is shown and compared with that of two other EMS in
Section 4. Finally, conclusions about the proposed NDP EMS are given in
Section 5.
2. Preparation of Knowledge about the NDP EMS
In this section, we first give a short description of the studied parallel HEV powertrain. Secondly, the optimal EMS problem is demonstrated in
Section 2.2, which introduces the HEV modeling, key concepts of the EMS control problem, and instantaneous cost in optimization, which have been described in [
6]. We present the preparation of knowledge for the proposed NDP method, which contains a wavelet transformation theory, in
Section 2.3; a CWNN in
Section 2.4; a multi-resolution analysis theory of a function in
Section 2.5; and a multi-resolution wavelet neural network in
Section 2.6. A CWNN is based on a wavelet transformation theory and traditional background neural network. The MRWNN in this research is based on a CWNN and multi-resolution analysis for a function.
2.1. Hybrid Powertrain
This research selects a torque-coupling parallel HEV as the objective HEV. Vehicle parameters for simulation are listed in
Table 1.
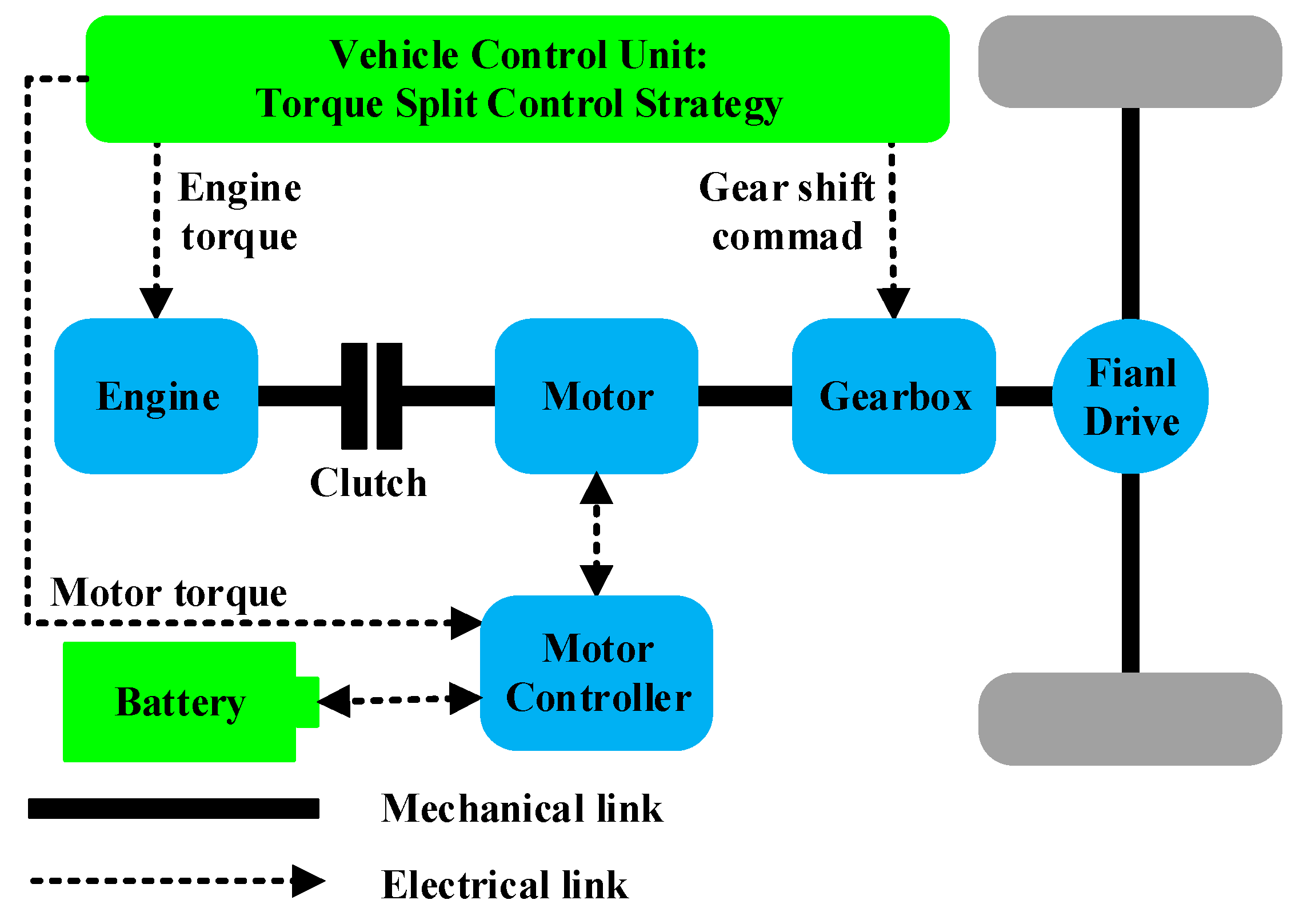
Figure 1 shows the parallel hybrid powertrain that has a spark ignition engine, an electric motor, a nickel metal hydride battery pack, an automatic clutch, a gearbox, and a final drive. The electric motor is located between the engine and the transmission. In this configuration, the motor rotor works as the torque coupler. When the clutch is engaged, the engine and motor have the same speed. The advantage of this architecture is the elimination of the mechanical torque coupler, which results in a simple and compact drivetrain. This configuration also benefits from abundant operational modes, where the motor functions as an engine starter, along with an electrical generator for regenerative braking and an engine power assistant. Here, a vehicle control unit directly commands the torque required from both power sources of the vehicle. The powertrain information has been shown in [
6].
2.2. Optimal Control Problem
In this section, we demonstrate key concepts for the EMS control problem. For example, state vector, control vector, control constraints, and instant cost function.
In this research, we model the parallel HEV as a discrete-time dynamic system as follows:
where
represents the current discrete time step;
is the total sampling time of the whole driving cycle;
is the state variables which summarize past information that is relevant for future optimization;
is the control variables, which is the decision to be selected at time step
from a given set;
is a function according to which the HEV updates. We choose torque demand at the driven wheels from the driver
, wheel speed
, and battery state of charge
as state variables (e.g.,
) and engine torque
and gear ratio
as control variables (e.g.,
).
The optimal control problem for this EMS is to find an optimal control sequence to minimize the fuel economy, and constrain the battery SOC within a reasonable scope during a driving cycle. The optimal control action
can be obtained by solving the following Bellman equation:
where
is the optimal cumulated cost function from time step
to the end of the driving cycle. As for the infinite horizon, Equation (2) will change to the following equation:
where
is a discount factor, which ensures the total cost function convergence and indicates the importance of future cost to current cost;
denotes the cost incurred at time step
.
where
, and
are the fuel consumption and SOC derivation from a desired value from time step
to time step
, respectively; the weight
provides tunable parameters that meet the SOC constraints.
When solving the above optimal control problem, the following boundary conditions should be satisfied to guarantee that the parallel HEV components will work properly:
2.3. Wavelet Transformation Theory
In this section, we will give a brief introduction to a wavelet transformation theory, which is the basis of a CWNN.
If a function
satisfies the following item:
where
is the Fourier transformation of
, which is called a wavelet or mother wavelet.
Given a wavelet
, a family of wavelets
can be derived with different
and
from the following equation:
where
is a dilation factor and
is a translation factor.
is called the wavelet basis function.
For a function
, we can get its wavelet transform
from the following equation:
where
is the conjugate function of
.
is the inner product of
and a family of wavelets
.
For a common input
defined in discrete state, and the dilation set at 2, we can get the following wavelets:
where
and
.
2.4. Common Wavelet Neural Network
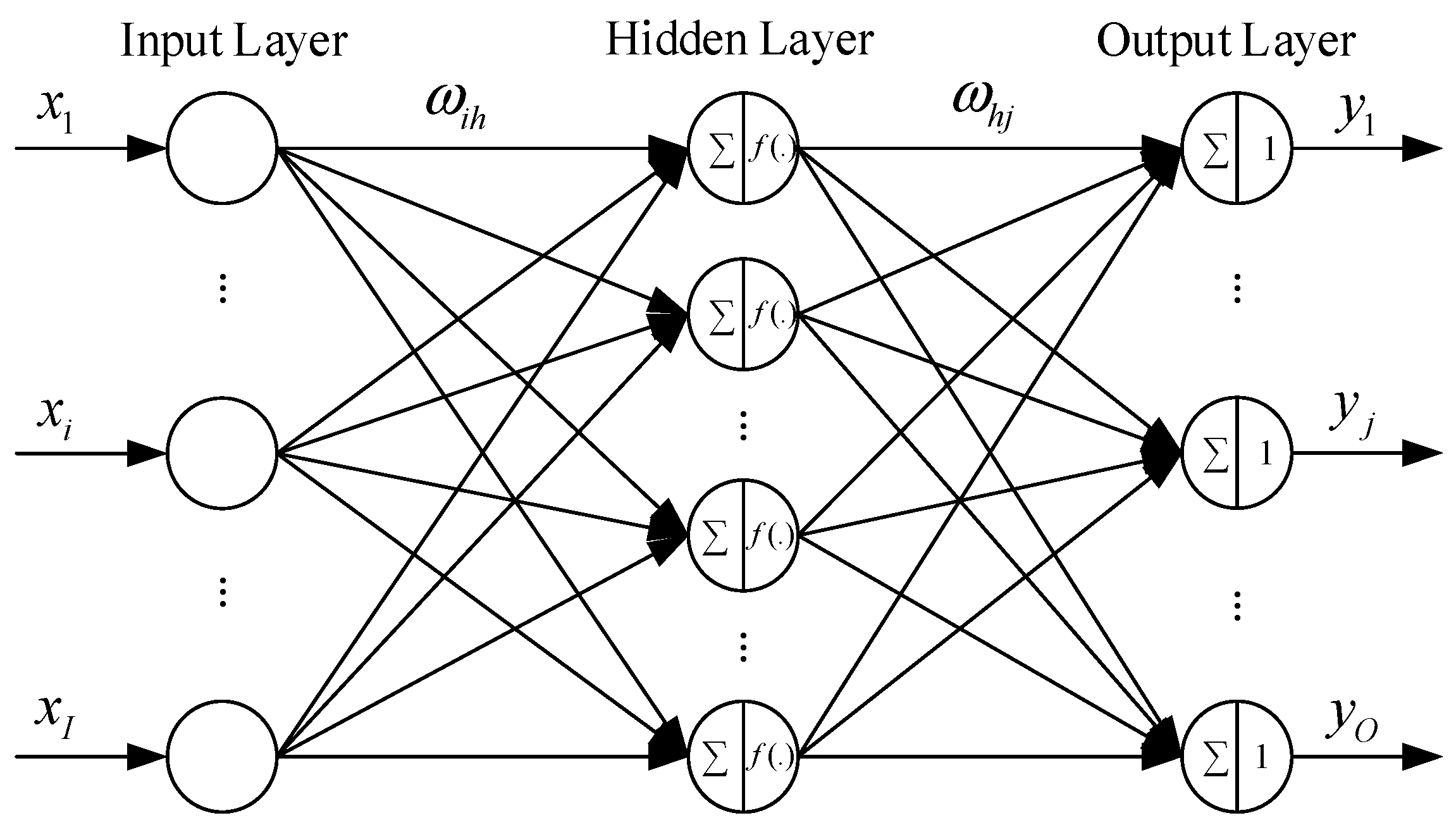
The wavelet neural network is based on a wavelet transformation theory and neural network. Different from broadly used back propagation neural network (BPNN) and RBFNN, a wavelet neural network, which we call a common wavelet neural network (CWNN), utilizes a wavelet function as the activation function in the hidden layer. Compared with a RBFNN, a CWNN does not need a clustering preprocessing on the input data, and has same approximation ability. A commonly used topology of a CWNN is shown in
Figure 2.
In the CWNN, the input of hidden layer is as follows:
where
is the input vector;
and
are the total neuron number of the input layer, and hidden layer, respectively; and
is the weight factor between the
th input neuron and the
th hidden layer.
The output of the hidden layer is as follows:
where
is the shift factor of the wavelet basis function;
is the scaling factor;
is the weight factor between input layer to hidden layer; and
is the activation function in the hidden layer, which is a wavelet function, such as a Morlet function.
The input of the output layer is as follows:
where
is the weight factor between the
th hidden neuron and the
th output neuron;
is the total neuron number of the output layer;
is the output vector of the network.
In a CWNN, the weight factors are trained according to a gradient descent algorithm, while the prediction error propagates backwards. The network parameters
th training is as follows:
where
is the prediction error indication of the network;
is the learning rate of the network. Meanwhile,
,
,
and
are as follows:
2.5. Multi-Resolution Analysis of Functions
The multi-resolution analysis of functions is based on the theory of multi-resolution analysis proposed by Mallat in [
15,
16].
Let () is a closed subspace of a square-integrable space at the resolution , which is also the sampling interval. The subspace family has the following features:
- (1)
Causality and consistency.
- (2)
Scaling regularity. When we approximate a function
with
at the resolution
, where
is a projection of
in subspace
. Then the following equation will be satisfied:
- (3)
- (4)
Orthogonal basis existence.
where
is a unique function, called a scaling function. Meanwhile,
,
and
.
When we approximate a function
with
at the resolution
, we can conclude the following equation based on Feature (4):
We define
be the orthogonal space of
in
. In other words,
and
. Then,
where
is a projection of
on the space
. We can say
is a detail of function
at resolution
. Mallat has pointed out that a unique wavelet
exists, whose dilations and translations constitute a family of functions
. These
are the orthonormal basis of space
. As a result, we get the following equation:
where
is the projection of
on the orthonormal basis
. We obtain the following equation:
In other words, at the resolution
,
where
is the lowest resolution and
is the total number of scaling functions. In a real application, we can obtain
according to the following equation:
where
, and
are the maximum and minimum value of
. Using Equation (19), we will get the following equation at resolution
:
Equations (19) and (21) are the multi-resolution analysis of functions proposed by Moody in [
17].
2.6. Multi-Resolution Wavelet Neural Network
In this research, we proposed a multi-resolution wavelet neural network (MRWNN) based on the theories mentioned in
Section 2.4 and
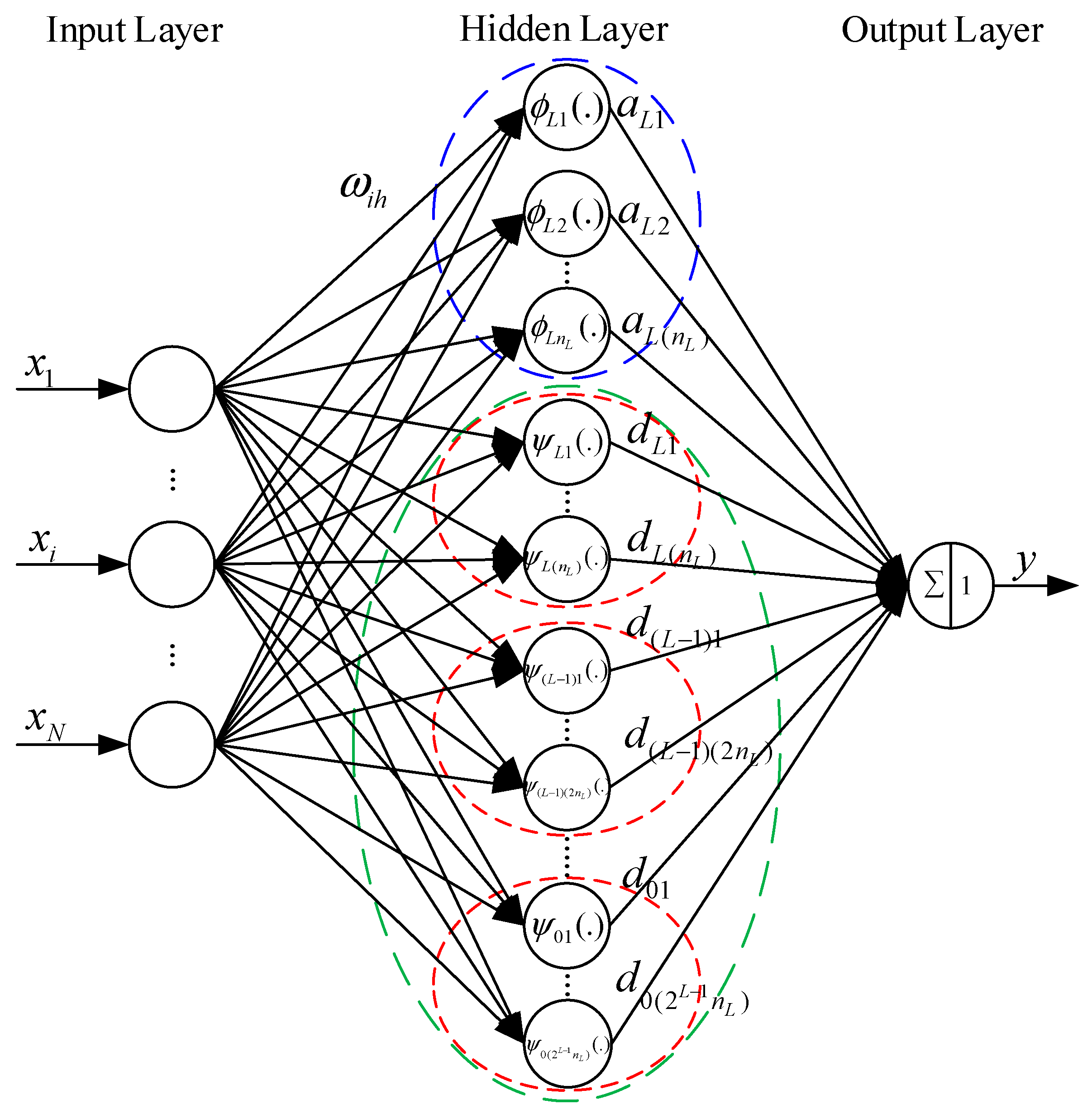
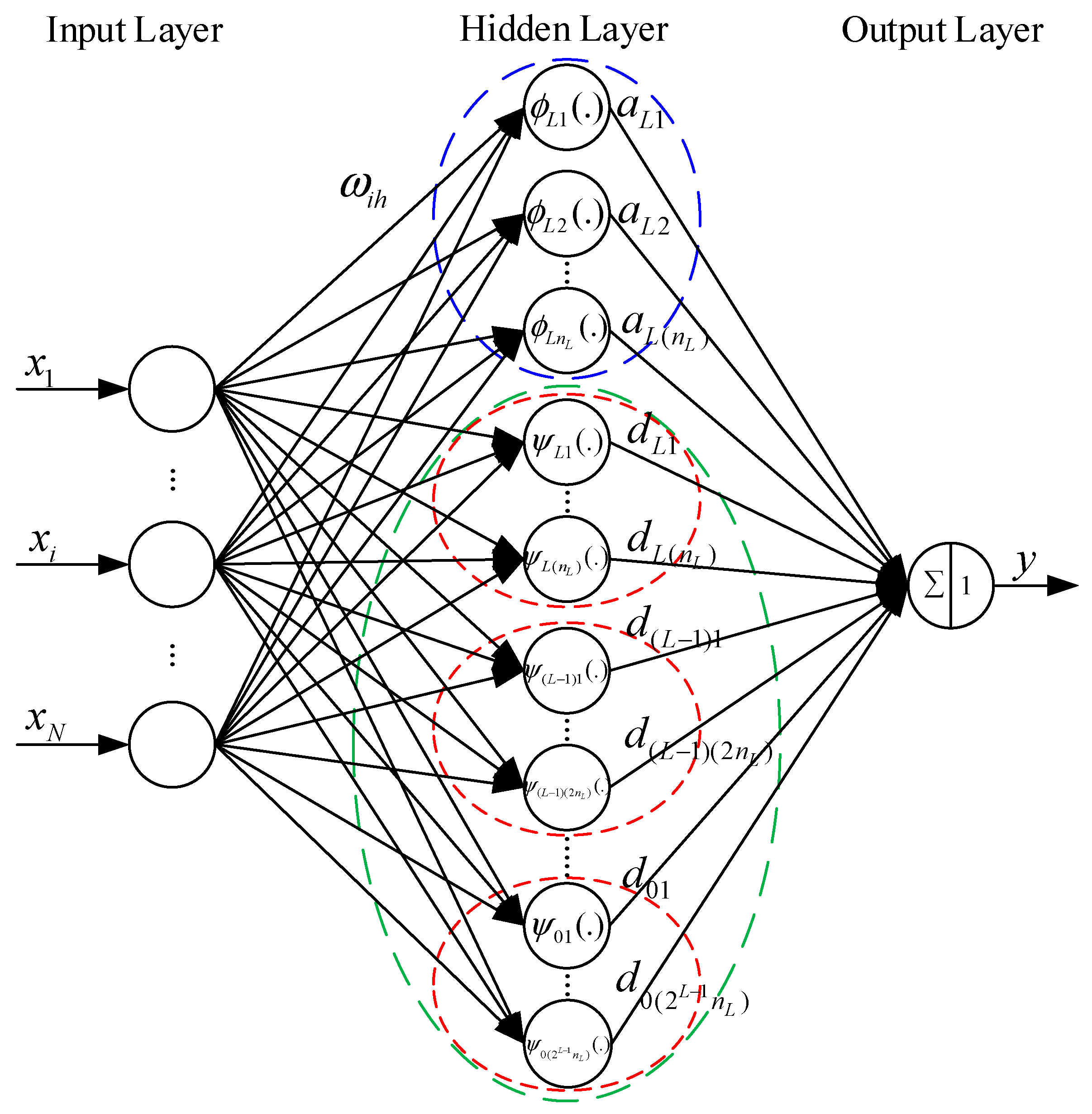
Section 2.5. The structure of the proposed MRWNN is shown in
Figure 3. Different to RBFNN, the hidden layer in MRWNN contains two types of nodes: wavelet nodes (
-nodes, which are in the green ellipse) and scaling nodes (
-nodes, which are in the blue ellipse, where one red circle represents the scaling nodes at a same resolution). Compared with RBFNN, the MRWNN does not need a clustering preprocessing for the input data, and enjoys faster convergence and higher approximate accuracy for the orthogonal characteristic of activation function in hidden nodes.
The output of the proposed MRWNN is as follows:
where
is the input of the
th hidden layer or scaling node;
(
) is the input of the
th hidden layer or the
th wavelet node.
In real applications, we usually train the network at resolution . If the output does not meet our precision requirements, we keep the scaling nodes and add the detail of resolution at resolution . We proceed like this until the training precision meets our requirements.
In this MRWNN, the weight factors are trained according to the same gradient descent algorithm as in Equations (13) and (14). The weight factor between the
th hidden node and the output node is as follows:
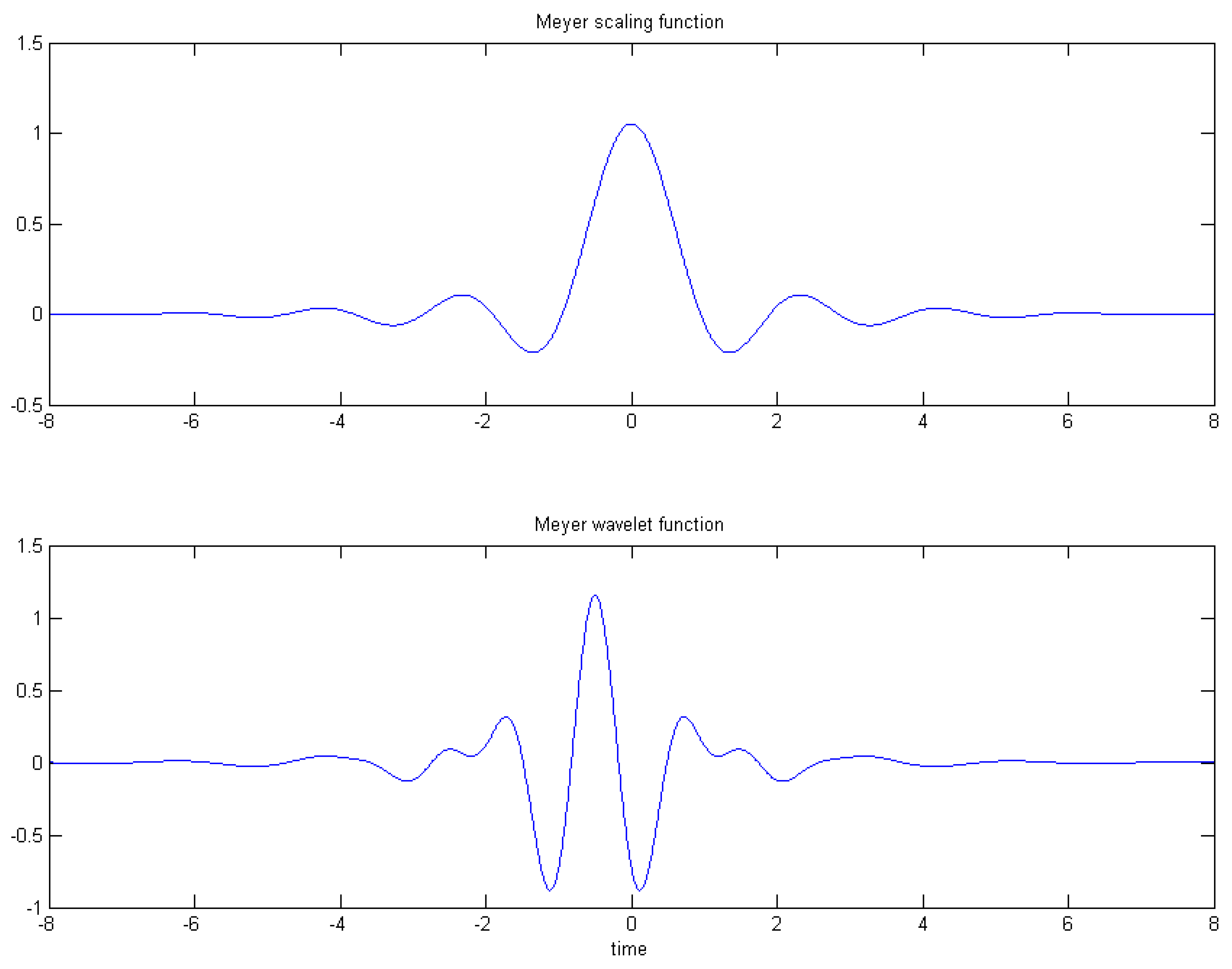
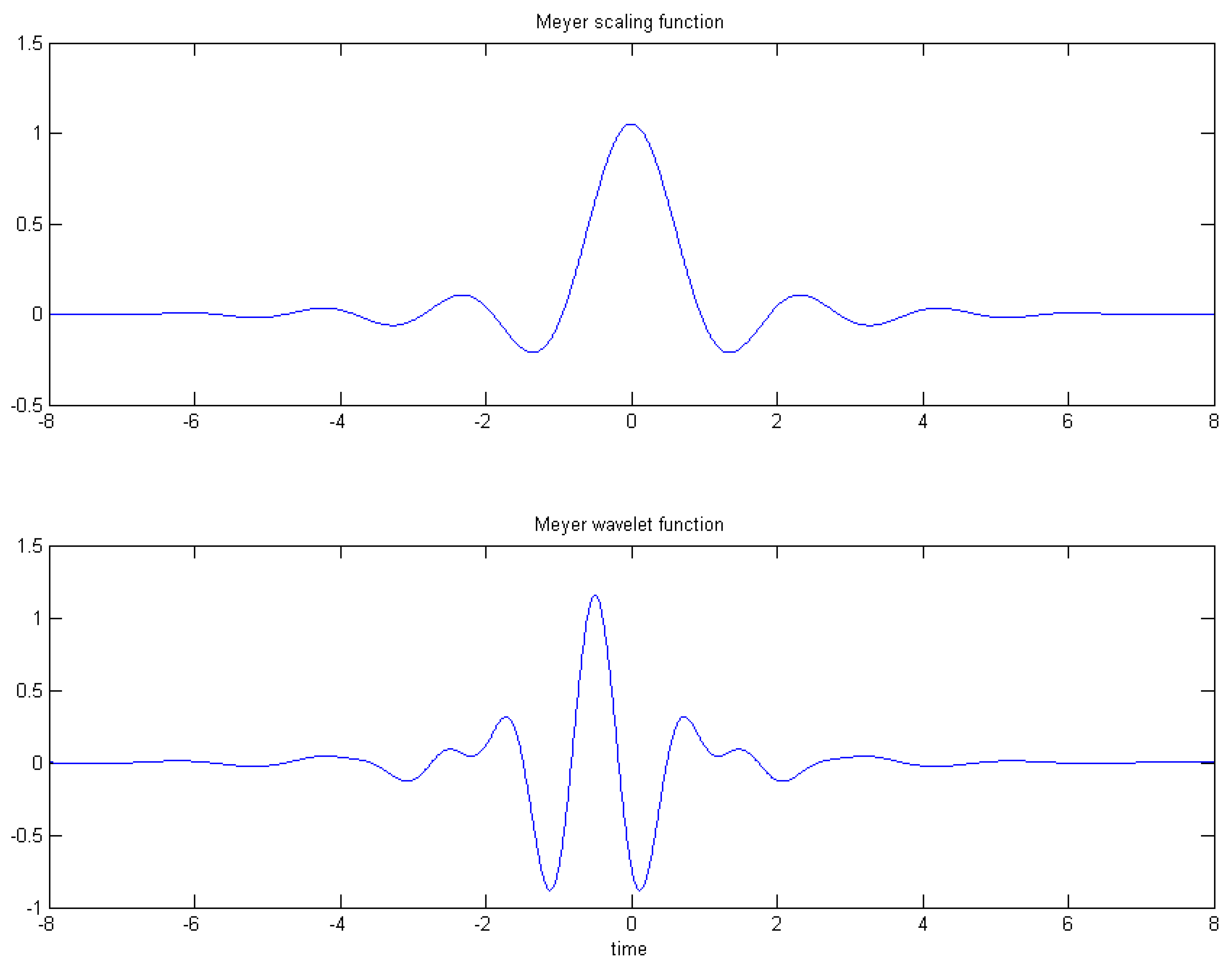
In this research, we use the Meyer wavelet, which is infinitely differentiable with effective support and defined in the frequency domain. In [
18], Valenzuela and de Oliveira give the closed analytical expression for the Meyer scaling function and Meyer wavelet function shown as follows:
where
is the scaling function. The wavelet function is as follows:
where
The Meyer wavelet and scaling functions in time domain are shown in
Figure 4.
3. Proposed NDP for Parallel HEVs
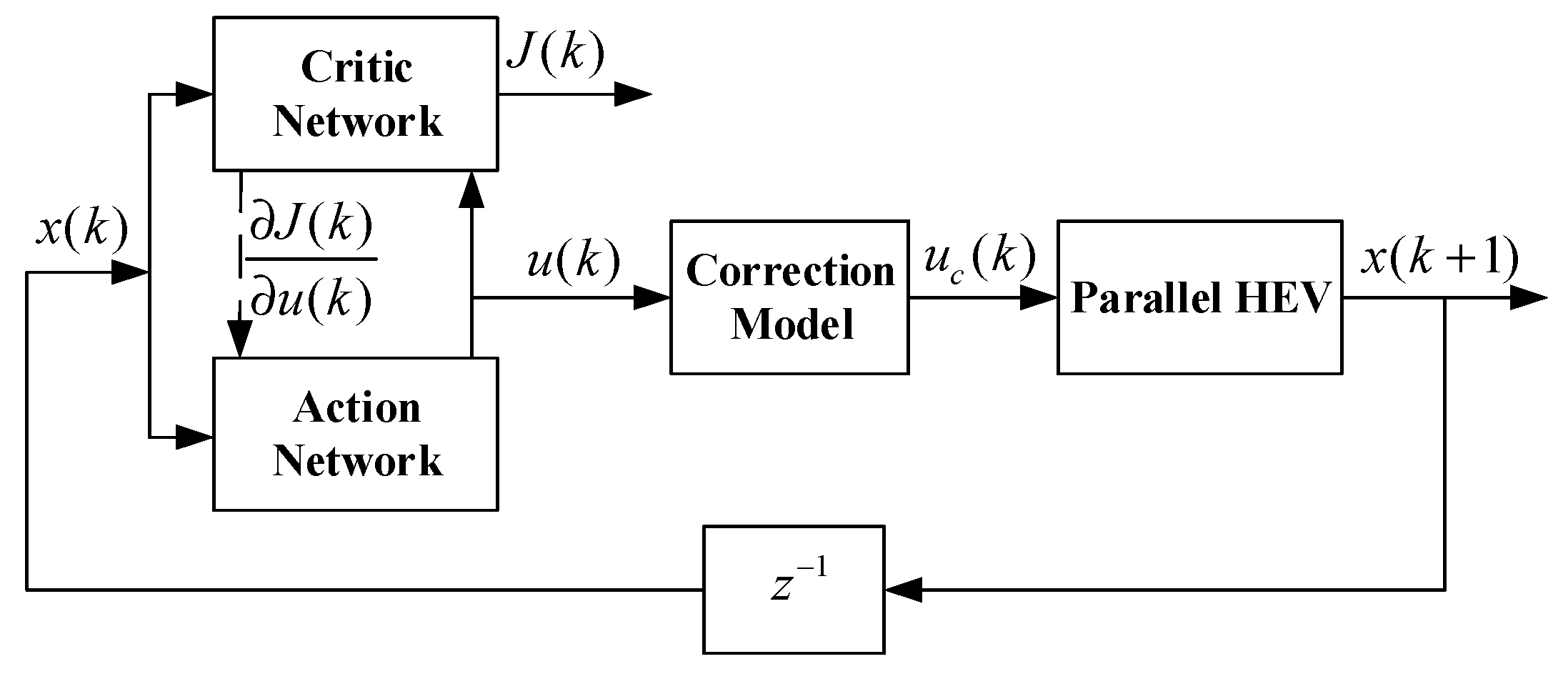
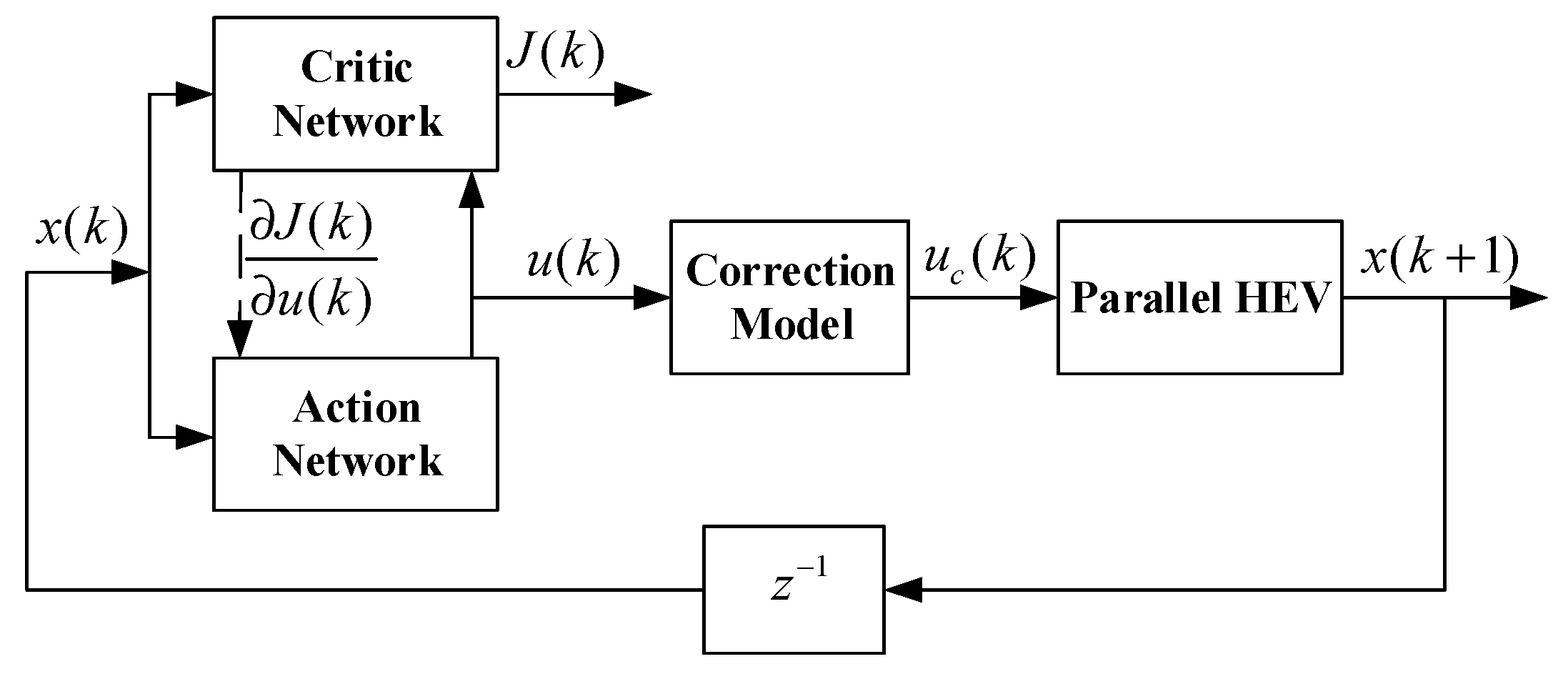
Figure 5 is the structure of the proposed NDP method, which contains a critic network, an action network, a correction model for the output of action network, and a time delay from time step
to time step
. The critic network utilizes a MRWNN presented in
Section 2.5. The action network utilizes a CWNN, in which the activation function is a Morlet function. The correction model modifies the output variable
of action network to fit for Limitation (5). Because the output gear ratio of action network is a continuous variable, we also use the correction model to discretize the continuous gear ratio to the real vehicle gear ratio of the vehicle. The critic network, action network, and implementation procedure of the proposed NDP EMS will be described in this section.
3.1. Critic Network Description
In the NDP method, the critic network is used to get the approximate value
of the optimal value function
, which is shown in Equation (2), and used in dynamic programming. As a result, we get the following equation:
will be obtained by training the weights of the network according to current state variables and control variables .
In this paper, the critic network is a MRWNN, described in
Section 2.5. In this critic network,
is the input vector, and
is the output vector. The prediction error is defined according to a
learning approach as follows:
where
is a discount factor;
used as a reinforcement signal, is the instantaneous cost, and can be calculated according to Equation (4).
Meanwhile, the prediction error indication of the critic network is defined as follows:
In the critic network, the weight factors (e.g., and ) are adapted according to Equations (13) and (14).
3.2. Action Network Description
The objective of the action network is to find an action to approximate the optimal control shown in Equation (2), which is done by adapting the weights and parameters of the network according to the variation of the output of critic network . In this network, the state vector of the vehicle is the input vector (), and the control vector of the vehicle is the output vector ().
In this paper, the action network is a common wavelet neural network (CWNN) consisting of three layers of neurons—input, hidden, and output layer—as shown in
Section 2.4. The adaptation of the action network is achieved by back-propagating the following prediction error
:
Meanwhile, the prediction error indication of the action network is defined as follows:
In the action network, the weight factors (e.g., and ) and wavelet function parameters (e.g., and ) are adapted according to the same gradient descent algorithm in Equations (13) and (14).
3.3. NDP Implementation Procedure
The NDP implementation procedure is presented as follows:
Select an appropriate structure for the critic network and action network separately, which means determining the number of hidden layers. In this design, the number of hidden layers of the critic network and action network is 30 and 11, respectively.
Initialize the weights and parameters of both networks according to a rule-based EMS. Initialize the output of the critic network, the maximum training error of critic network , the maximum of the norm for weights of action network variation , and maximum times for training both networks, and . In this research, the maximum training times for the action network and critic network are all 50.
Set the whole iteration time and .
Set . Calculate the current control vector .
Set the iteration time of critic network to .
Set . Calculate the error of critic network and according to Equations (32) and (33). Update the weights and parameters of the critic network according to Equations (13) and (14);
When or , save the weights and parameters of the critic network as the weights and parameters at time step , and proceed to step 8. Otherwise, return to step 6.
Set the iteration time of action network to .
Set . Calculate the error of action network and according to Equations (34) and (35). Update the weights and parameters of the action network according to Equations (13) and (14);
When or , save the weights and parameters of the critic network as the weights and parameters at time step , and proceed to step 11. Otherwise, return to step 9.
When the norm of weights for action network variation is less than , save the weights of both networks as the weights at the current time step; otherwise, return to step 4.
4. Results and Discussion
In the simulation test of the proposed NDP-based EMS, the detailed model of the parallel HEV is built in ADVISOR2002 (Advanced Vehicles Simulator) to accurately reflect the vehicle performance, which is based on Simulink. The simulation was carried out on a computer with Intel Core 2 Duo 3.10 GHZ CPU and 32G memory. We have compared the proposed NDP method with the NDP method in [
14] to test the proposed NDP based on CWNN and MRWNN. We have also compared the NDP EMS with a SDP method proposed in [
6], which is an optimal method, in driving cycles of CYC_UDDS, CYC_1015 and a composite driving cycle, which is composed of a CYC_1015, a CYC_UDDS, and a CYC_WVUCITY driving cycle, to test the optimality of the proposed NDP method.
According to
Section 2.2, the orientation of the EMS is to maximize the fuel economy and to satisfy SOC constraint. In simulations, we evaluate fuel economy with miles per gallon (mpg) gasoline equivalent. The SOC constraint is to ensure battery SOC
. Meanwhile, we evaluate the component efficiency of the parallel HEV with engine average efficiency, average motoring efficiency, and average generating efficiency.
Table 2 shows the fuel economy and HEV component efficiency of the proposed NDP and NDP EMS in [
14] in driving cycles of CYC_UDDS. From
Table 2, we can see that the proposed NDP improves fuel economy by about 5.4%, average generating efficiency by about 7.6%, and average motoring efficiency by about 1.2% compared with the NDP in [
14]. The two NDP methods keep SOC in nearly the same range of 0.55–0.7. These indicate that the proposed NDP with CWNN and MRWNN has better control results in the UDDS driving cycle than the NDP with RBFNN in [
14]. In the NDP in [
14], they are 25 and 20. This may be due to the CWNN and MRWNN enjoying better approximation and learning ability in handling nonlinear problems than a RBFNN. To further improve the performance of the proposed NDP EMS, we can increase the maximum training time of the action and critic network, or decrease the training error of the two networks.
Table 3,
Table 4 and
Table 5 show the fuel economy and component efficiency of SDP, and the proposed NDP-based EMS in driving cycles of CYC_UDDS, CYC_1015, and the composite driving cycle. We can conclude that, compared with the SDP in [
6], the proposed NDP EMS improves fuel economy by about 25.9%, 6.2%, and 25.6%, respectively, under CYC_UDDS, CYC_1025, and the composite driving cycle. In the three driving cycles, the proposed NDP and SDP all keep SOC in nearly the same range. The proposed NDP EMS also improves the average generating efficiency by about 6.7%, 5.2%, and 4%, respectively, under CYC_UDDS, CYC_1025, and the composite driving cycle. This shows that the proposed NDP is better than the SDP method. There are three reasons for the simulation results. The first is that the state space and action space are all discretized in SDP and successive in NDP, which reduces the error induced by low discretization resolution. The second reason is that the NDP-based method has generalization ability and improves the generating efficiency in braking. Last but not least, the probability transfer matrix of SDP method is built with the UDDS driving cycle, which induces that the SDP is only suitable for driving cycles with the same probability transfer matrix.
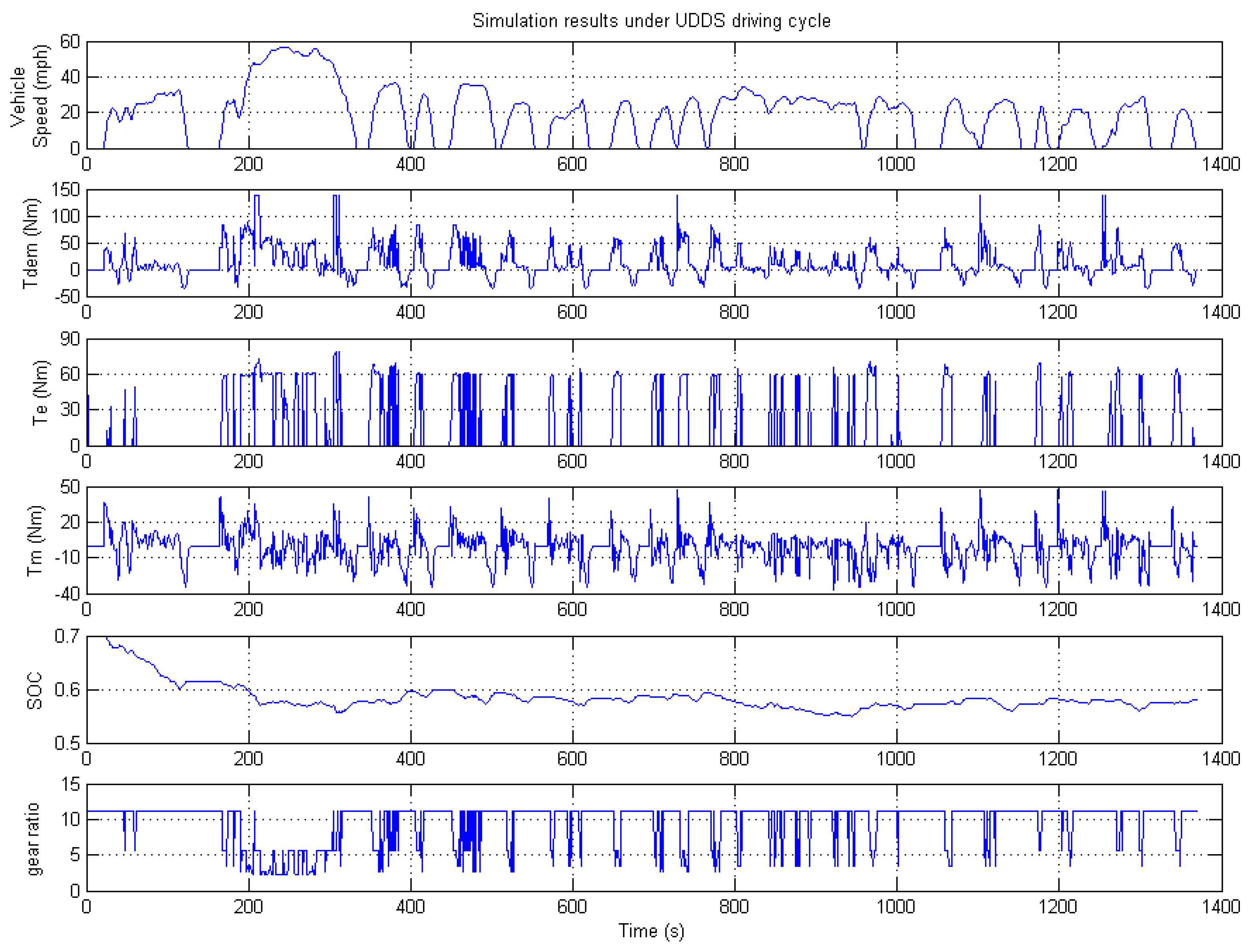
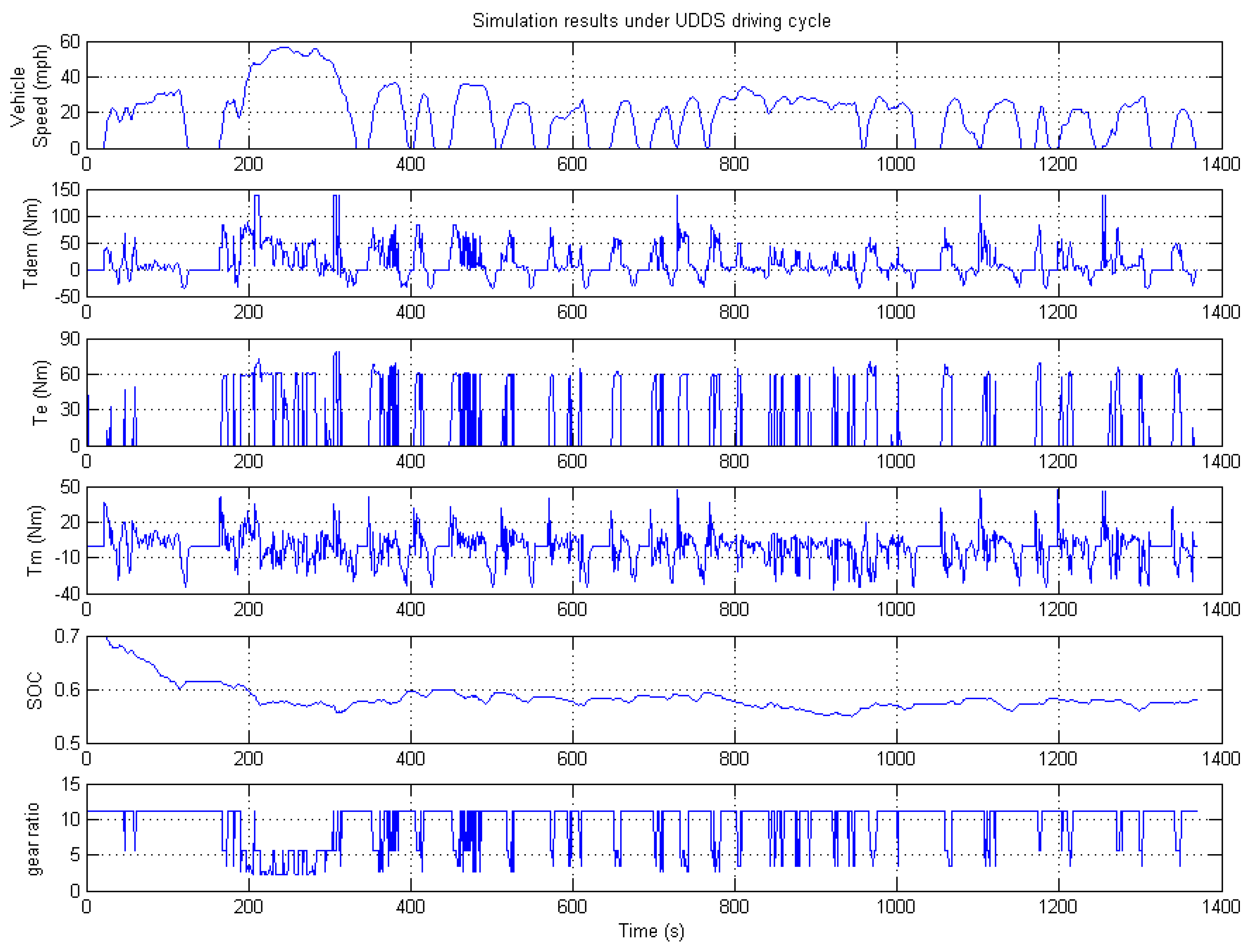
Figure 6 shows the torque demand at the input of gear box, engine torque, motor torque, SOC, and gear ratio variation of proposed NDP EMS results in CYC_UDDS driving cycle. We can see that the engine is in a higher torque output mode most of the time, and the motor provides energy in peak and engine starting times. Battery SOC is constrained in the region of 0.55–0.7, which ensures safe battery usage.
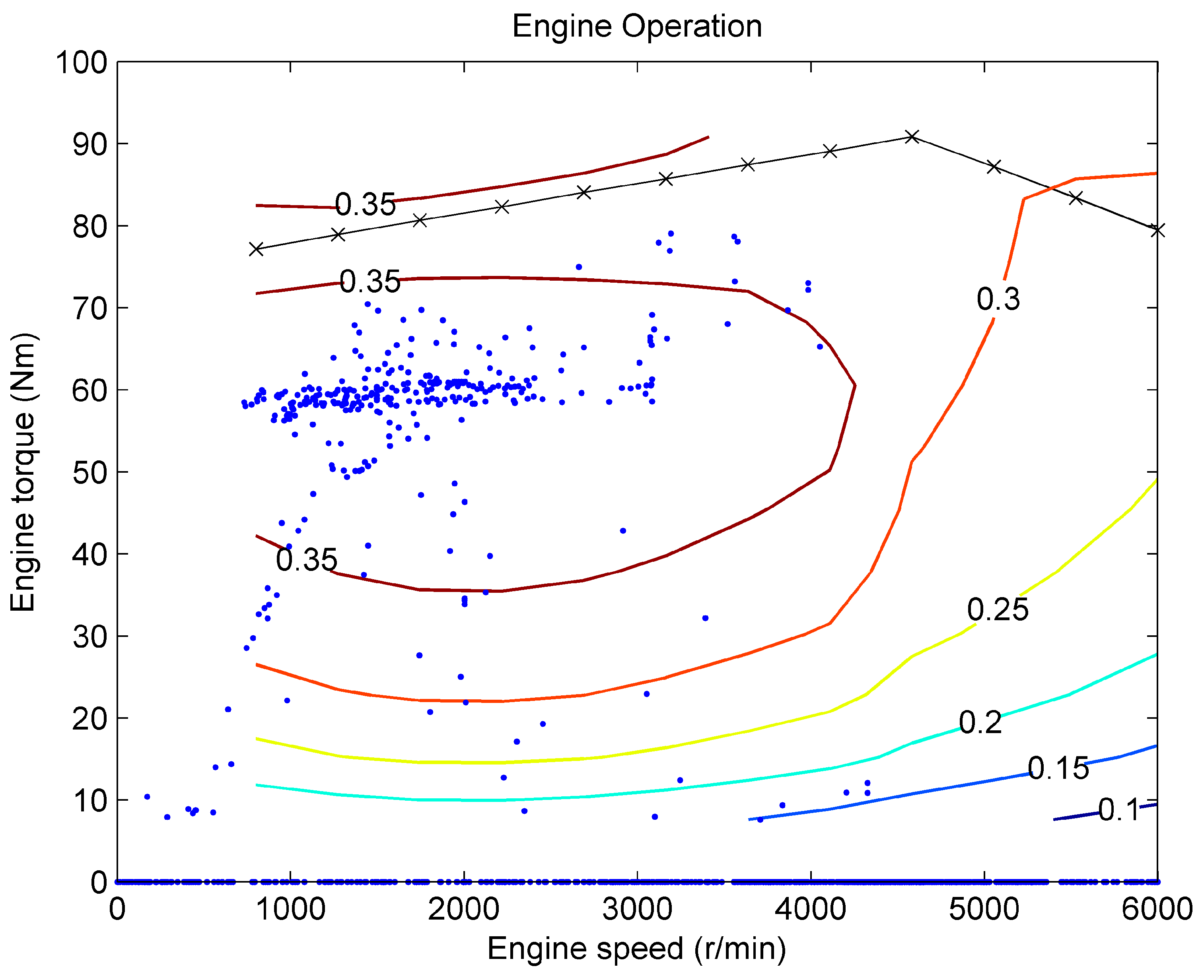
Figure 7 shows the engine operation efficiency in NDP EMS. We can see that, in most situations, the engine is in an efficiency region larger than 0.35.
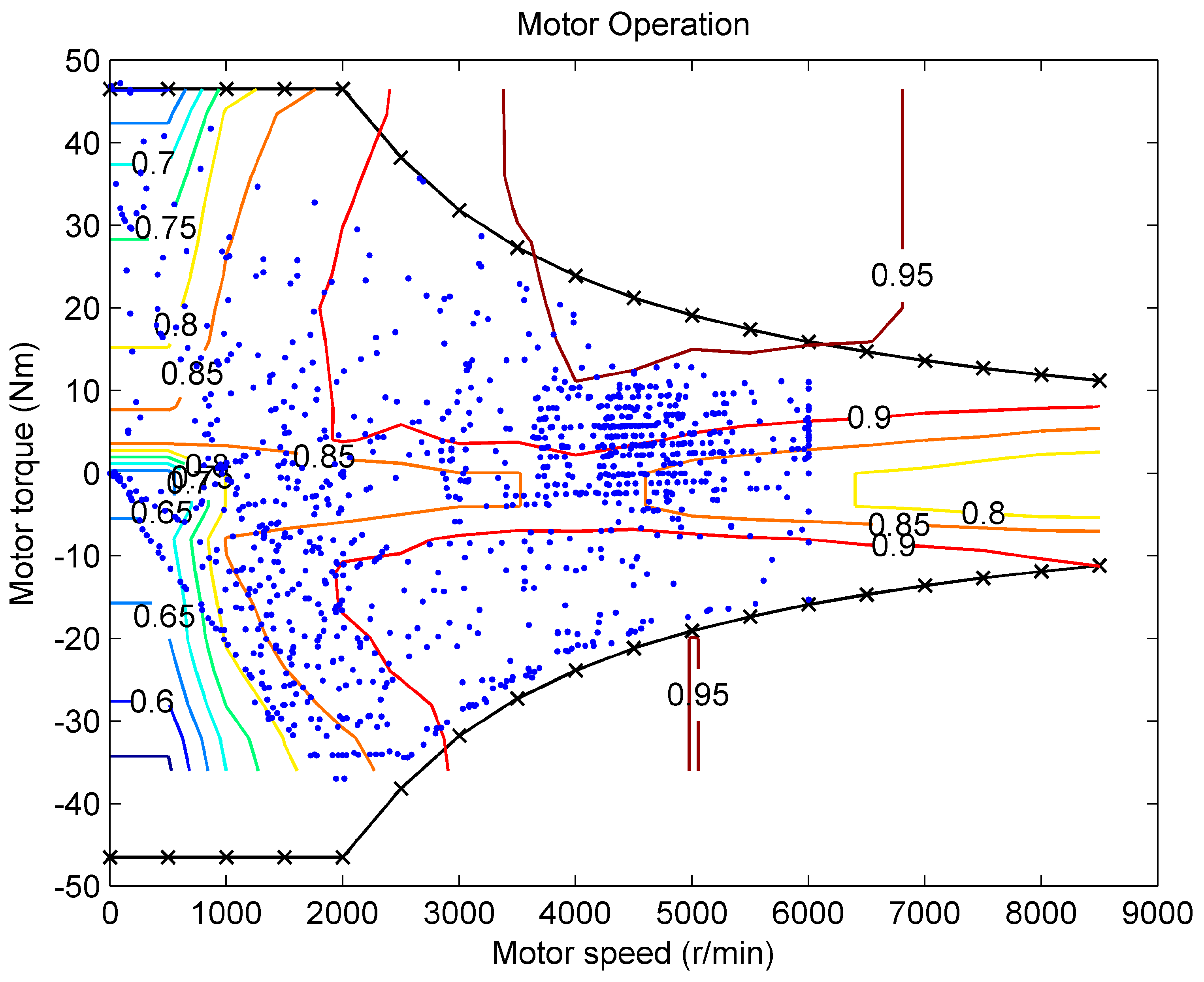
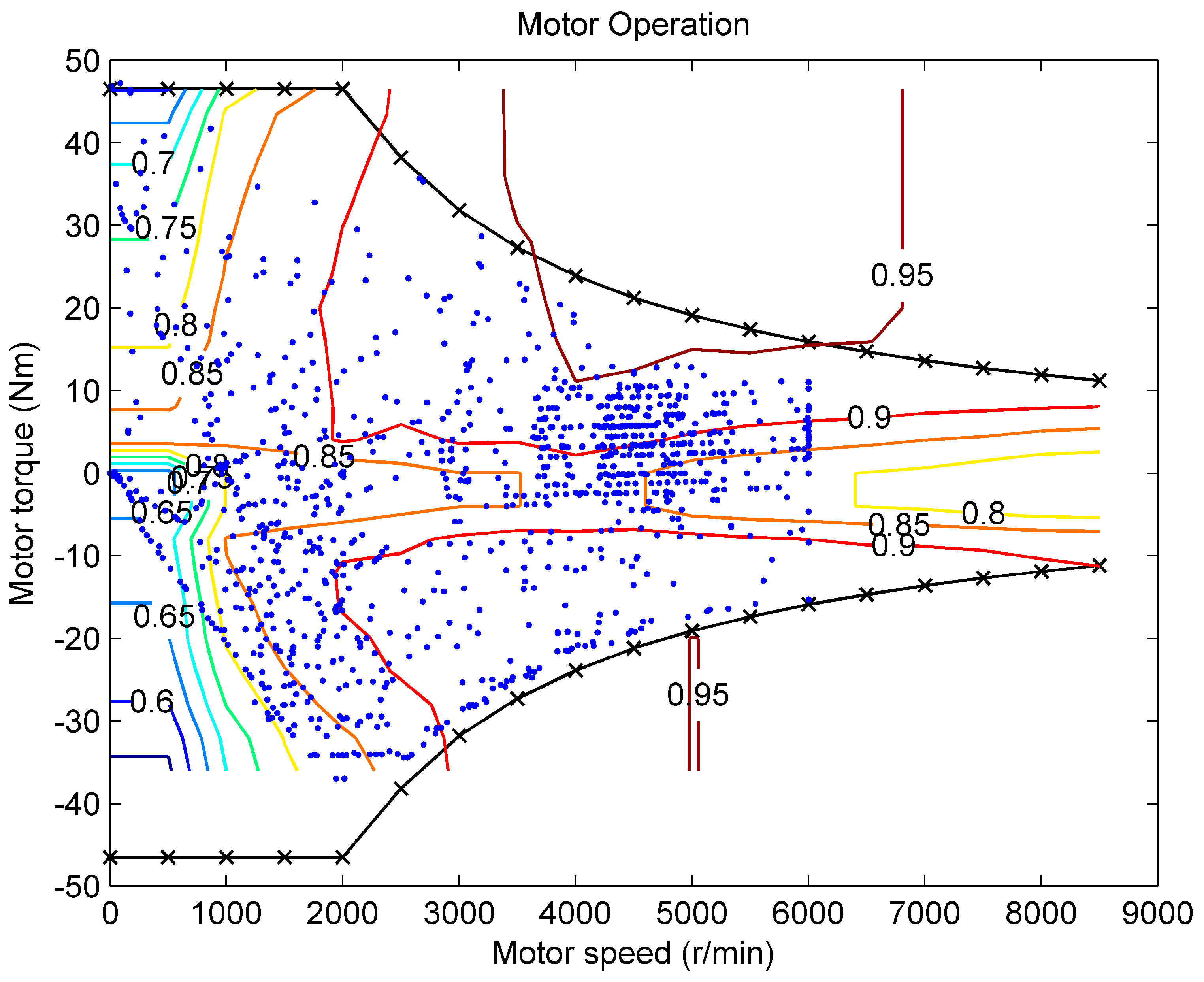
Figure 8 shows the motor operation efficiency in NDP EMS. We can see that, in most situations, the motor is in an efficiency region larger than 0.8. The operation points in the lower efficiency region are distributed uniformly, which coincides with the actual operational points of the motor in real applications.
5. Conclusions
For an HEV, EMS design is critically related to the fuel economy and battery SOC degradation. In this paper, a neuron-dynamic program (NDP) has been designed for the EMS problem of a parallel HEV. In this NDP, a multi-resolution wavelet neural network is used as the critic network to approximate the cumulated value function; a common wavelet neural network is employed to train the optimal action according to current state vector and the output of the action network. A gradient descent algorithm is utilized to train both the neural networks.
ADVISOR2002 simulation results show that the proposed NDP EMS achieves better performance in fuel economy, generating better efficiency and average engine efficiency than the NDP reported before with RBFNN as a critic network and an action network under CYC_UDDS driving cycle. The simulation results also indicate that, compared with the SDP approach in three different driving cycles, the proposed NDP EMS significantly improves fuel economy and average generating efficiency. The NDP method also guarantees battery SOC at a safe range of 0.55–0.7 from the start of one cycle to the end. The performance of the NDP EMS demonstrates the usefulness of the NDP in online applications. The comparison with RBFNN-based NDP EMS confirms the efficiency of the CWNN and MRWNN.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}