A Fire Detection Algorithm Based on Tchebichef Moment Invariants and PSO-SVM

Abstract
:1. Introduction
2. Tchebichef Moments
3. Feature Extraction Based on TMIs
3.1. Tchebichef Polynomials Expansion
3.2. Tchebichef Moment Invariants
3.3. Feature Extraction
4. Particle Swarm Optimization-Support Vector Machine (PSO-SVM)
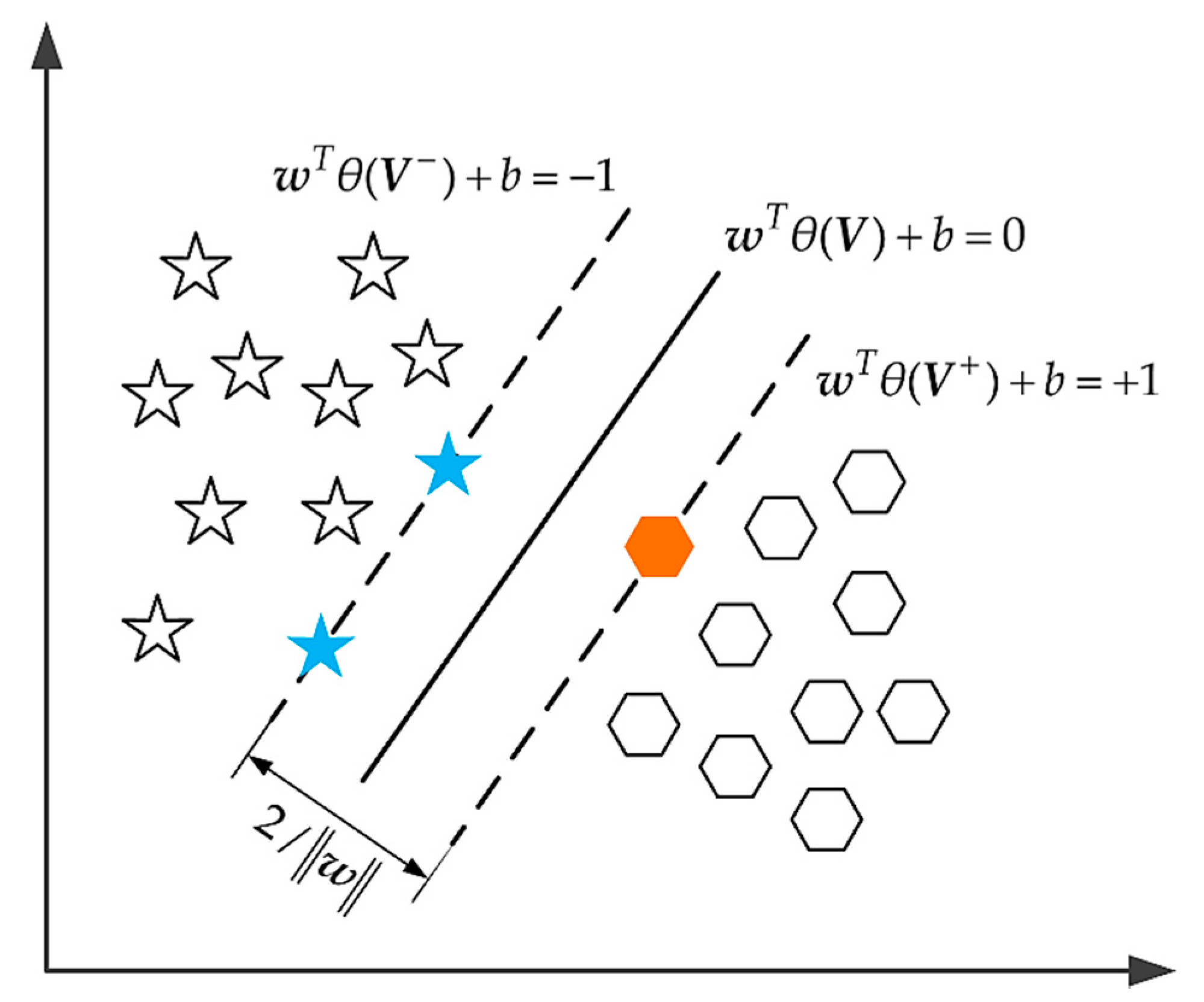
4.1. Support Vector Machine (SVM)
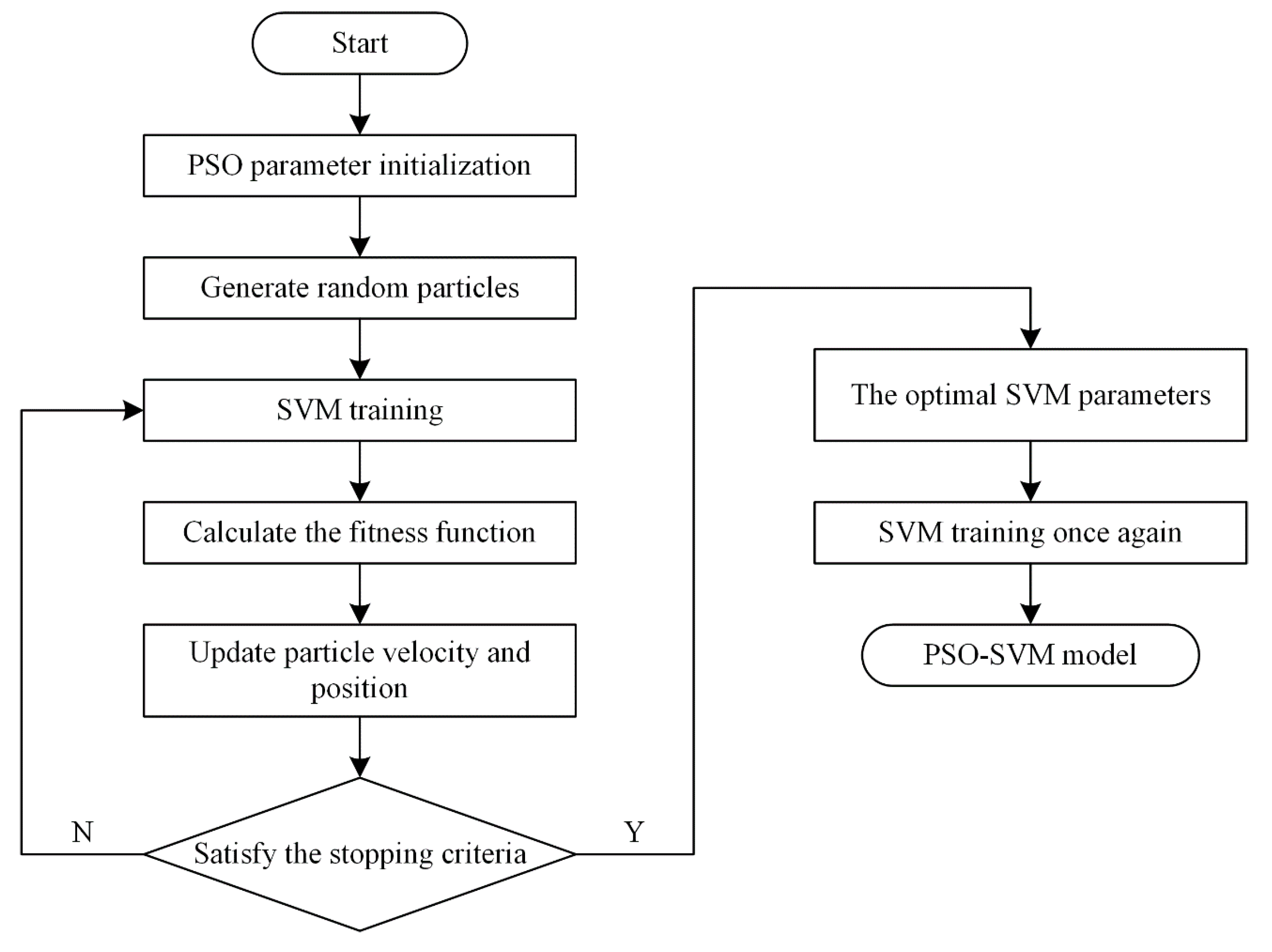
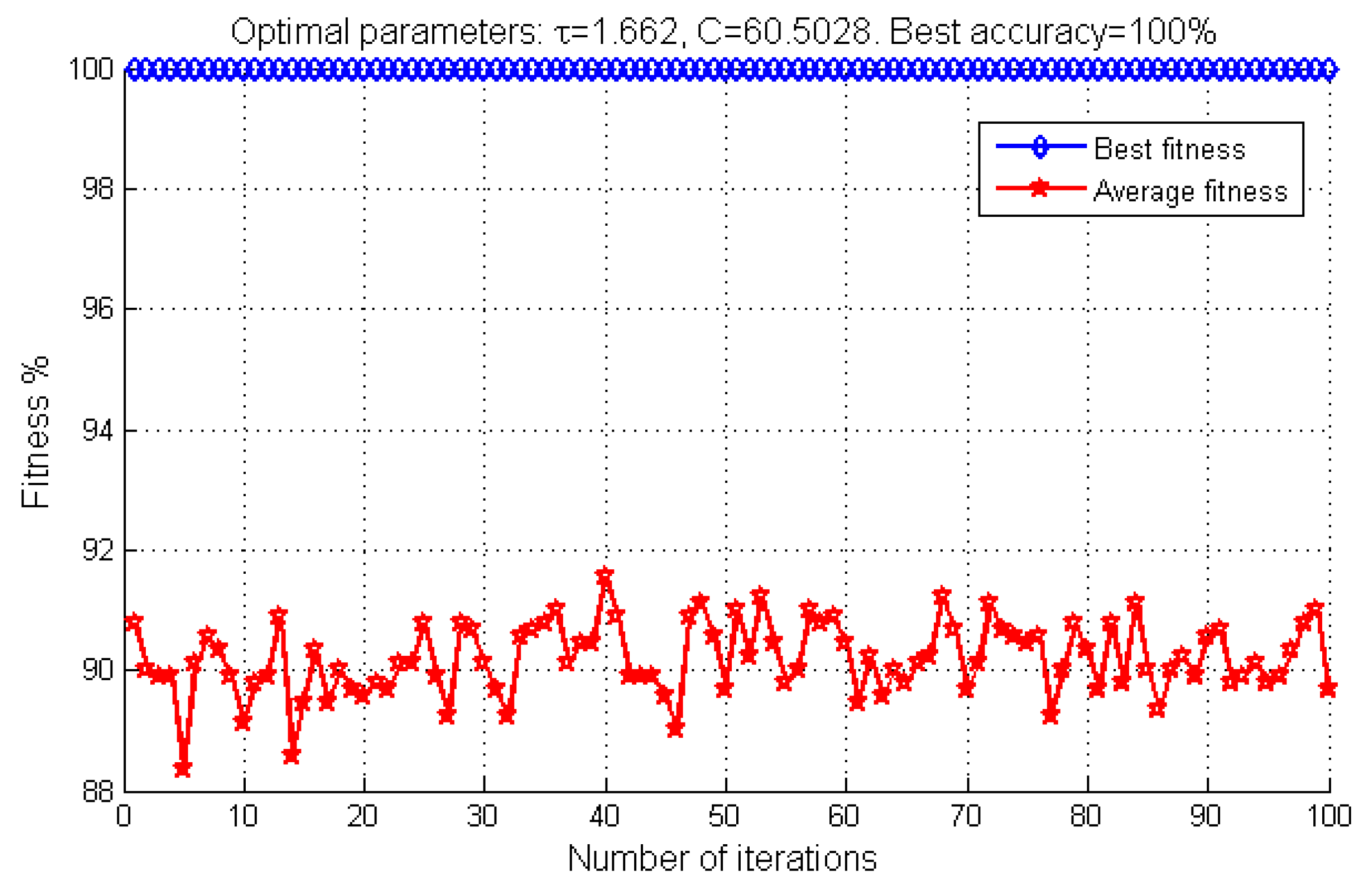
4.2. Particle Swarm Optimization for SVM Parameters
- Step 1.
- Initialize particle and set PSO parameters. Generate the initial particles at random, which are composed of the SVM parameters and . Then, set the PSO parameters, including the size of population , maximum number of iterations , inertia weight , and acceleration coefficients , .
- Step 2.
- Fitness calculation. Evaluate the fitness value of every particle, which is the average classification accuracy of K-fold cross-validation. Take the current particle as its individual-best point and regard the particle with maximal fitness value as the global-best point.
- Step 3.
- Update. Every particle’s velocity and position are updated by Equations (34) and (35), respectively. Evaluate the fitness of every current particle and compare the fitness value with that of the individual-best point and that of the global-best point. If the current value is better, update the particle with the current value as its individual-best point or global-best point.
- Step 4.
- Check stopping criteria. If the maximum number of iterations is attained, the evolutionary process will stop. Otherwise, proceed to Step 3.
- Step 5.
- Determine parameters. When the maximum number of iterations is attained and the stopping criteria is satisfied, the values of optimal parameters and are finally obtained. Then, the training and verification procedure is ended, and the PSO-SVM model is constructed.
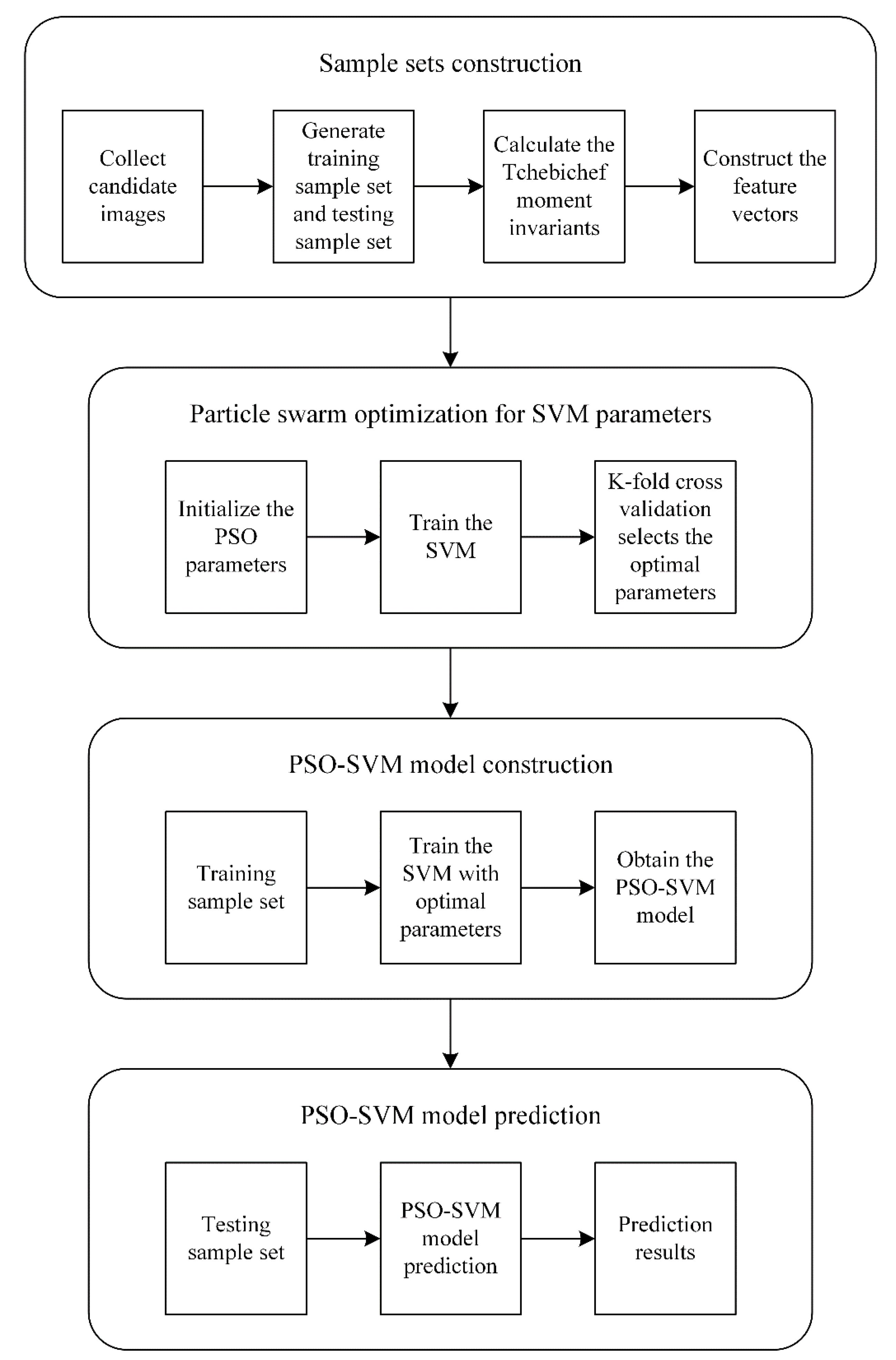
4.3. Process of Fire Image Detection Based on the PSO-SVM Model
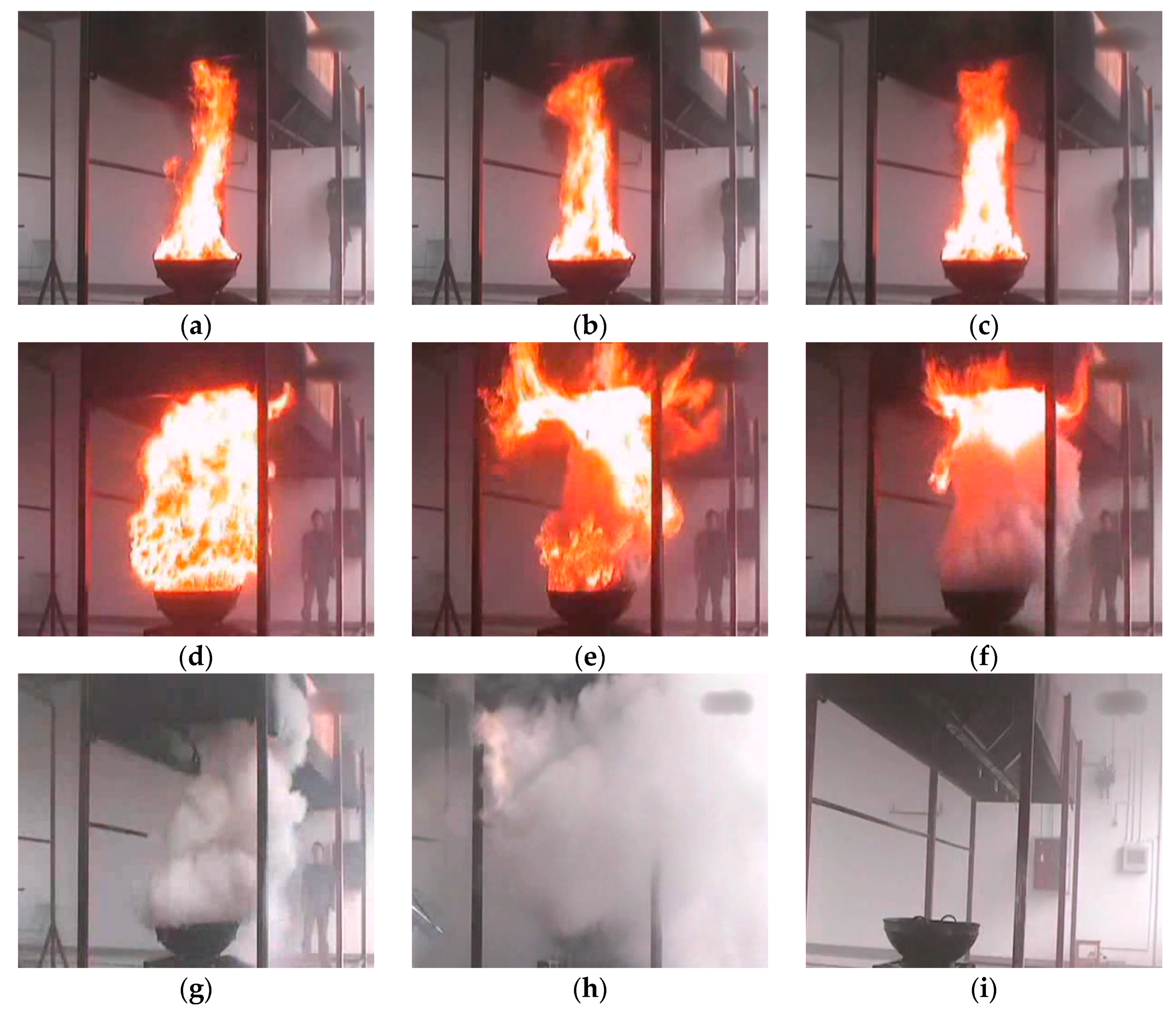
5. Experiments
5.1. Experimental Setup
5.2. Results and Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Verstockt, S.; Lambert, P.; Walle, R.V.D.; Merci, B.; Sette, B. State of the art in vision-based fire and smoke detection. In Proceedings of the 14th International Conference on Automatic Fire Detection (AUBE), Duisburg, Germany, 8–10 September 2009. [Google Scholar]
- Wang, H.; Finn, A.; Erdinc, O.; Vincitore, A. Spatial-temporal structural and dynamics features for video fire detection. In Proceedings of the IEEE Workshop on Applications of Computer Vision (WACV), Sarasota, FL, USA, 15–17 January 2013. [Google Scholar]
- Li, G.; Lu, G.; Yan, Y. Fire detection using stereoscopic imaging and image processing techniques. In Proceedings of the IEEE International Conference on Imaging Systems and Techniques (IST), Santorini, Greece, 14–17 October 2014. [Google Scholar]
- Duong, H.D.; Tinh, D.T. An efficient method for vision-based fire detection using SVM classification. In Proceedings of the International Conference on Soft Computing and Pattern Recognition (SoCPaR), Hanoi, Vietnam, 15–18 December 2013. [Google Scholar]
- Vipin, V. Image processing based forest fire detection. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 87–95. [Google Scholar]
- Celik, T. Fast and efficient method for fire detection using image processing. ETRI J. 2010, 32, 881–890. [Google Scholar] [CrossRef]
- Habiboğlu, Y.H.; Günay, O.; Çetin, A.E. Covariance matrix-based fire and flame detection method in video. Mach. Vis. Appl. 2012, 23, 1103–1113. [Google Scholar] [CrossRef] [Green Version]
- Borges, P.V.K.; Izquierdo, E. A probabilistic approach for vision-based fire detection in videos. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 721–731. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, J. Automatic fire smoke detection based on image visual features. In Proceedings of the International Conference on Computational Intelligence and Security Workshops (CISW), Harbin, China, 15–19 September 2007. [Google Scholar]
- Çelik, T.; Özkaramanlı, H.; Demirel, H. Fire and smoke detection without sensors: Image processing based approach. In Proceedings of the 15th European Signal Processing Conference (EUSIPCO), Poznan, Poland, 3–7 September 2007. [Google Scholar]
- Chen, J.; He, Y.; Wang, J. Multi-feature fusion based fast video flame detection. Build. Environ. 2010, 45, 1113–1122. [Google Scholar] [CrossRef]
- Yuan, F. An integrated fire detection and suppression system based on widely available video surveillance. Mach. Vis. Appl. 2010, 21, 941–948. [Google Scholar] [CrossRef]
- Ha, C.; Hwang, U.; Jeon, G.; Cho, J.; Jeong, J. Vision-based fire detection algorithm using optical flow. In Proceedings of the Sixth International Conference on Complex, Intelligent and Software Intensive Systems (CISIS), Palermo, Italy, 4–6 July 2012. [Google Scholar]
- Yu, C.; Zhang, Y.; Fang, J.; Wang, J. Video smoke recognition based on optical flow. In Proceedings of the 2nd International Conference on Advanced Computer Control (ICACC), Shenyang, China, 27–29 March 2010. [Google Scholar]
- Wang, C.; Sun, L.; Yuan, T.; Sun, X. Wind turbine fire image detection based on LVQ neural network. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016. [Google Scholar]
- Rong, J.; Zhou, D.; Yao, W.; Gao, W.; Chen, J.; Wang, J. Fire flame detection based on GICA and target tracking. Opt. Laser Technol. 2013, 47, 283–291. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, X. Fire detection based on image processing in coal mine. In Proceedings of the International Conference on Internet Computing and Information Services (ICICIS), Hong Kong, China, 17–18 September 2011. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory, 2nd ed.; Springer: New York, NY, USA, 1999. [Google Scholar]
- Niu, X.; Yang, C.; Wang, H.; Wang, Y. Investigation of ANN and SVM based on limited samples for performance and emissions prediction of CRDI-assisted marine diesel engine. Appl. Ther. Eng. 2016, 111, 1353–1364. [Google Scholar] [CrossRef]
- Ren, J. ANN vs. SVM: Which one performs better in classification of MCCs in mammogram imaging. Knowl. Based Syst. 2012, 26, 144–153. [Google Scholar] [CrossRef] [Green Version]
- Widodo, A.; Yang, B.S. Support vector machine in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 2560–2574. [Google Scholar] [CrossRef]
- Giorgi, M.G.D.; Campilongo, S.; Ficarella, A.; Congedo, P.M. Comparison between wind power prediction models based on wacelet decomposition with least-squares support vector machine (LS-SVM) and artificial neural network (ANN). Energies 2014, 7, 5251–5272. [Google Scholar] [CrossRef]
- Zhu, K.; Song, X.; Xue, D. A roller bearing fault diagnosis method based on hierarchical entropy and support vector machine with particle swarm optimization algorithm. Measurement 2014, 47, 669–675. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2015, 26, 1007–1011. [Google Scholar] [CrossRef]
- Jia, Y.; Wang, H. Image fire-detection system based on hierarchical cluster and support vector machine. Futur. Commun. Technol. 2014, 51, 1405–1414. [Google Scholar]
- Truong, T.X.; Kim, J.M. Fire flame detection in video sequences using multi-stage pattern recognition techniques. Eng. Appl. Artif. Intell. 2012, 25, 1365–1372. [Google Scholar] [CrossRef]
- Li, T.; Mao, Y.; Feng, P.; Wang, H.; Jian, D. An efficient fire detection method based on orientation feature. Int. J. Control Autom. Syst. 2013, 11, 1038–1045. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Z.; Han, S.; Qu, C.; Yuan, Z.; Zhang, D. SVM based forest fire detection using static and dynamic features. Comput. Sci. Inf. Syst. 2011, 8, 821–841. [Google Scholar] [CrossRef]
- Du, J.; Liu, Y.; Yu, Y.; Yan, W. A prediction of precipitation data based on support vector machine and particle swarm optimization (PSO-SVM) algorithms. Algorithms 2017, 10, 57. [Google Scholar] [CrossRef]
- Wang, Y.M.; Cui, T.; Zhang, F.J.; Dong, T.P.; Li, S. Fault diagnosis of diesel engine lubrication system based on PSO-SVM and centroid location algorithm. In Proceedings of the International Conference on Control, Automation and Information Sciences (ICCAIS), Ansan, Korea, 27–29 October 2016. [Google Scholar]
- Ye, F.; Han, M. Simultaneous feature with support vector selection and parameters optimization using GA-based SVM solve the binary classification. In Proceedings of the IEEE International Conference on Computer Communication and the Internet, Wuhan, China, 13–15 October 2016. [Google Scholar]
- Flusser, J.; Zitova, B.; Suk, T. Moments and Moment Invariants in Pattern Recognition, 1st ed.; Wiley & Sons Ltd.: West Sussex, UK, 2009. [Google Scholar]
- Erdélyi, A.; Magnus, W.; Oberhettinger, F.; Tricomi, F.G. Higher Transcendental Functions, II; McGraw-Hill: New York, NY, USA, 1953. [Google Scholar]
- Wu, H.; Yan, S. Computing invariants of Tchebichef moments for shape based image retrieval. Neurocomputing 2016, 215, 110–117. [Google Scholar] [CrossRef]
- Mukundan, R.; Ong, S.H.; Lee, P.A. Image analysis by Tchebichef moments. IEEE Trans. Image Process. 2001, 10, 1357–1364. [Google Scholar] [CrossRef] [PubMed]
- Teague, M.R. Image analysis via the general theory of moments. J. Opt. Soc. Am. 1980, 70, 920–930. [Google Scholar] [CrossRef]
- Burges, C.J.C. A Tutorial on Support Vector Machines for Pattern Recognition; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1998. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Western Australia, Australia, 27 November–1 December 1995. [Google Scholar]
- Tu, C.J.; Chuang, L.Y.; Chang, J.Y.; Yang, C.H. Feature selection using PSO-SVM. Iaeng Int. J. Comput. Sci. 2007, 33, 111–116. [Google Scholar]
- Zhang, J.; Tittel, F.K.; Gong, L.; Lewicki, R.; Griffin, R.J.; Jiang, W.; Jiang, B.; Li, M. Support vector machine modeling using particle swarm optimization approach for the retrieval of atmospheric ammonia concentrations. Environ. Model. Assess. 2016, 21, 531–546. [Google Scholar] [CrossRef]
- Vashishtha, N.J. Particle swarm optimization based feature selection. Int. J. Comput. Appl. 2016, 146, 11–17. [Google Scholar]
- Saxena, A.; Shrivas, M.M. Filter—PSO based approach for feature selection. Int. J. Adv. Res. Comput. Sci. 2017, 8, 2063–2073. [Google Scholar]
- Pandey, A.; Jayant Deen, A.; Pandey, R. Content based structural recognition for image classification using PSO technique and SVM. Int. J. Comput. Appl. 2014, 87, 6–11. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Range | Description |
|---|---|---|---|
| 20 | — | Size of population | |
| 100 | — | Maximum number of iterations | |
| 1 | — | Inertia weight | |
| 1.49618 | — | Acceleration coefficient 1 | |
| 1.49618 | — | Acceleration coefficient 2 | |
| 3 | — | Fold number of cross-validation | |
| — | Kernel parameter of SVM | ||
| — | Penalty parameter of SVM |
| Image | ||||||
|---|---|---|---|---|---|---|
| (a) | −5.9312 | 3.4247 | −4.1861 | 9.1684 | −9.2667 | −4.4579 |
| (b) | −5.9295 | 3.4353 | −4.1804 | 9.1665 | −9.2634 | −4.4530 |
| (c) | −5.9059 | 3.3894 | −4.0997 | 9.1391 | −9.2161 | −4.3828 |
| (d) | −5.3757 | 2.5663 | −2.2898 | 8.5260 | −8.1568 | −2.8091 |
| (e) | −5.5311 | 2.9393 | −2.8203 | 8.7057 | −8.4674 | −3.2705 |
| (f) | −5.7740 | 3.3193 | −3.6496 | 8.9866 | −8.9526 | −3.9913 |
| (g) | −5.5260 | 2.7327 | −2.8028 | 8.6997 | −8.4570 | −3.2550 |
| (h) | −5.1724 | 2.1677 | −1.5957 | 8.2908 | −7.7506 | −2.2056 |
| (i) | −5.5726 | 2.7335 | −2.9621 | 8.7537 | −8.5503 | −3.3936 |
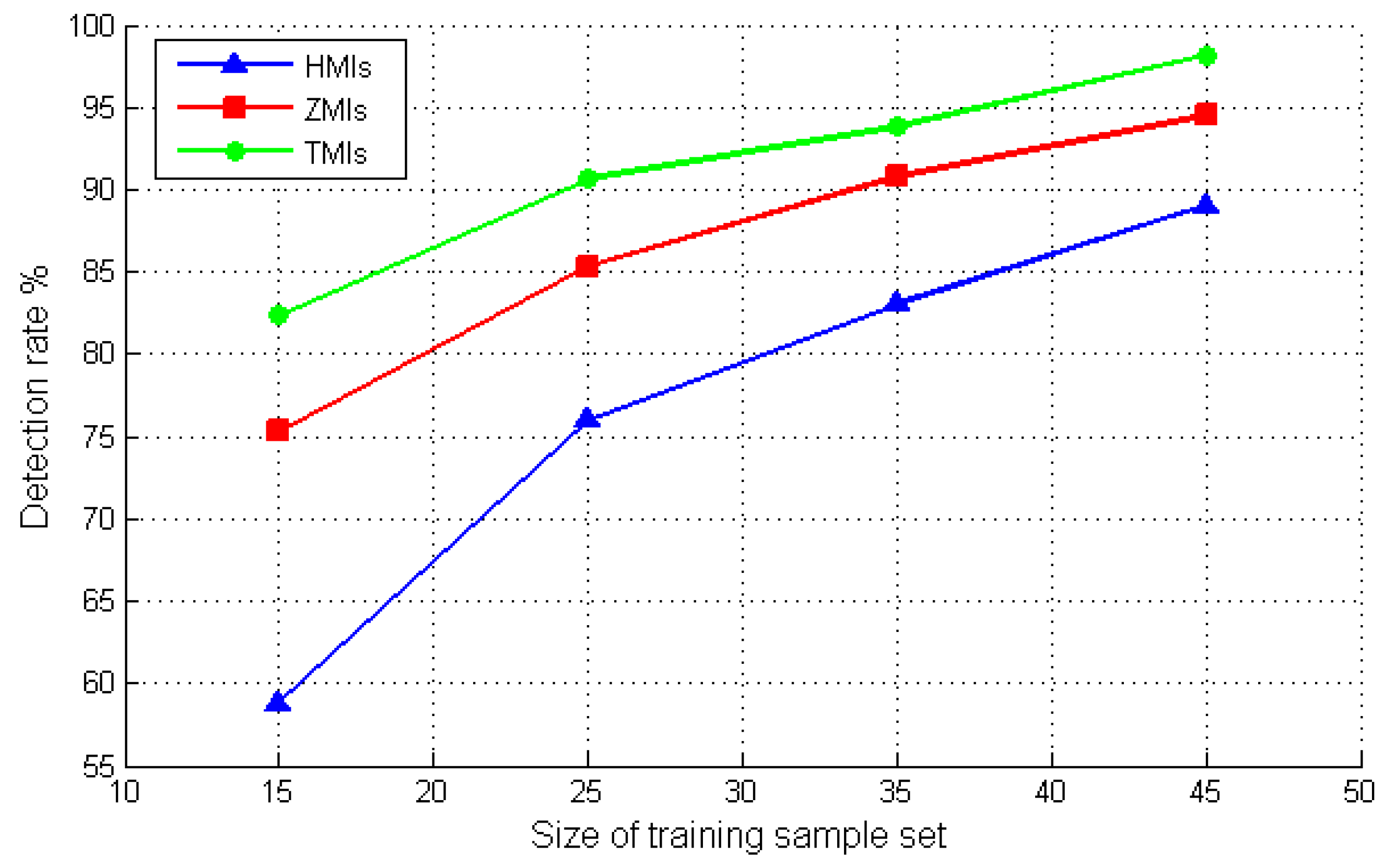
| Parameter | Hu | Zernike | Tchebichef |
|---|---|---|---|
| Detection amount | 49 | 52 | 54 |
| Detection rate | 89.09% | 94.55% | 98.18% |
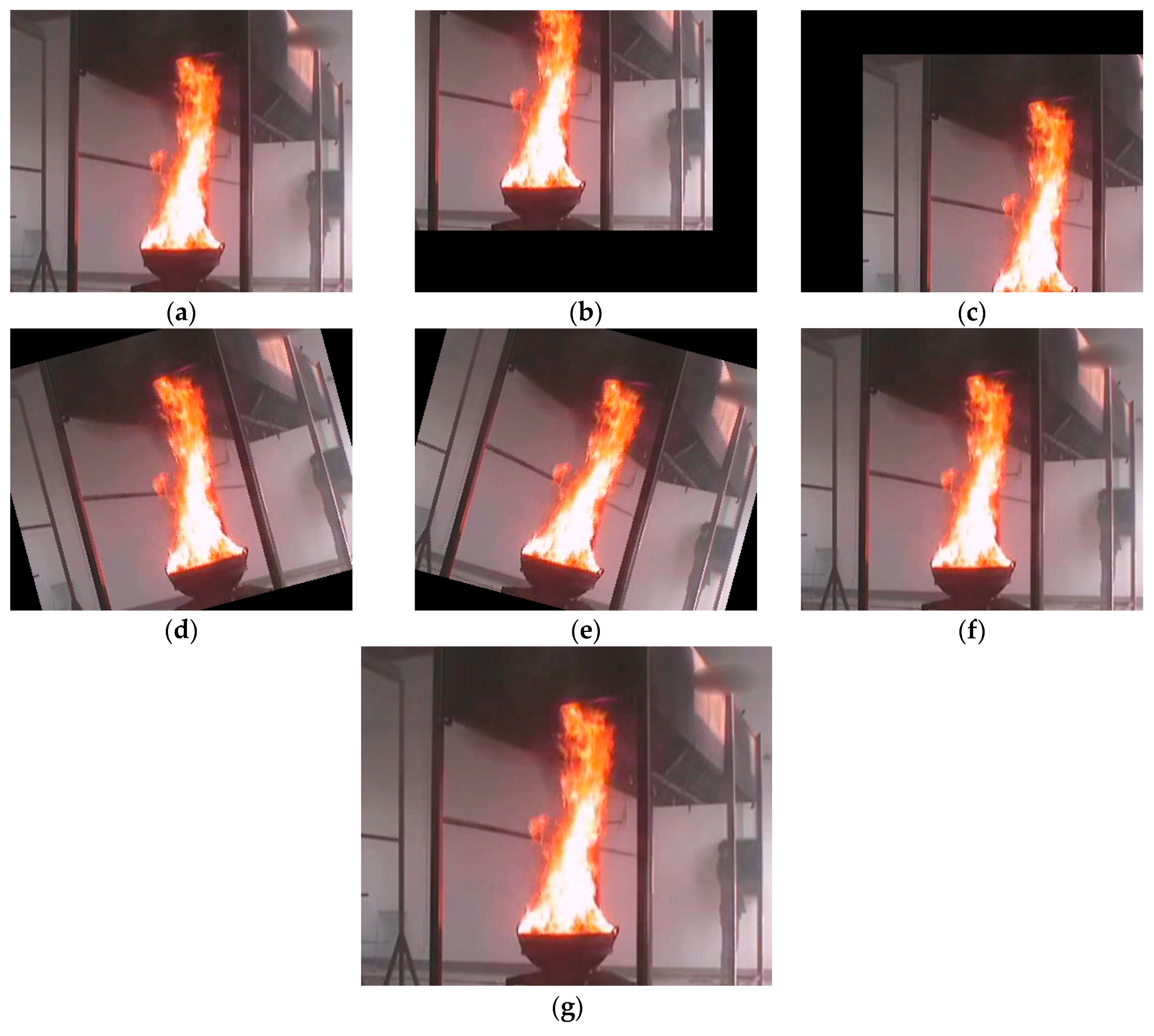
| (a) | −5.9312 | 3.4247 | −4.1861 | 9.1684 | −9.2667 | −4.4579 |
| (b) | −5.9645 | 3.4536 | −4.1563 | 9.0566 | −9.1736 | −4.3712 |
| (c) | −5.8993 | 3.4438 | −4.2905 | 9.0983 | −9.0935 | −4.5017 |
| (d) | −5.9399 | 3.3933 | −4.1257 | 8.9619 | −9.0458 | −4.4266 |
| (e) | −6.0124 | 3.4201 | −4.1036 | 9.1818 | −9.1457 | −4.4338 |
| (f) | −5.9461 | 3.4323 | −4.1398 | 9.2082 | −9.2214 | −4.3910 |
| (g) | −6.0049 | 3.4671 | −4.2001 | 9.1286 | −9.3101 | −4.4073 |
| Standard Deviation | 0.0405 | 0.0242 | 0.0621 | 0.0850 | 0.0939 | 0.0435 |
| Parameter | Hu | Zernike | Tchebichef |
|---|---|---|---|
| Detection amount | 29 | 31 | 35 |
| Detection rate | 80.56% | 86.11% | 97.22% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, Y.; Yang, M.; Fan, X.; Liu, Y. A Fire Detection Algorithm Based on Tchebichef Moment Invariants and PSO-SVM. Algorithms 2018, 11, 79. https://doi.org/10.3390/a11060079
Bian Y, Yang M, Fan X, Liu Y. A Fire Detection Algorithm Based on Tchebichef Moment Invariants and PSO-SVM. Algorithms. 2018; 11(6):79. https://doi.org/10.3390/a11060079
Chicago/Turabian StyleBian, Yongming, Meng Yang, Xuying Fan, and Yuchao Liu. 2018. "A Fire Detection Algorithm Based on Tchebichef Moment Invariants and PSO-SVM" Algorithms 11, no. 6: 79. https://doi.org/10.3390/a11060079
APA StyleBian, Y., Yang, M., Fan, X., & Liu, Y. (2018). A Fire Detection Algorithm Based on Tchebichef Moment Invariants and PSO-SVM. Algorithms, 11(6), 79. https://doi.org/10.3390/a11060079