Parameter Combination Framework for the Differential Evolution Algorithm


Abstract
:1. Introduction
2. Related Works
2.1. Classical Differential Evolution
2.2. Related Works on Parameter Control Strategy for DE
3. The Effect of Parameter Distribution on DE Algorithm
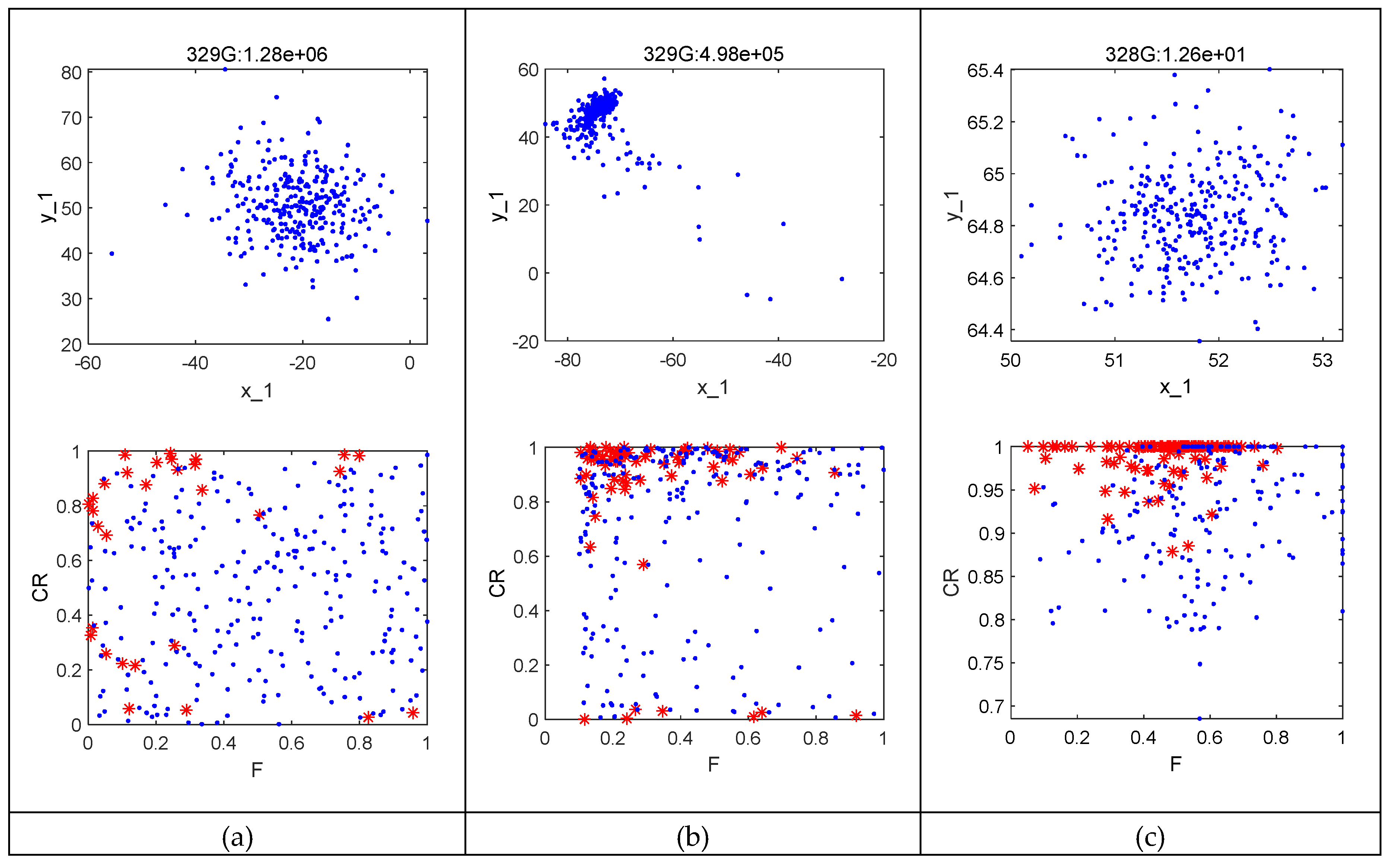
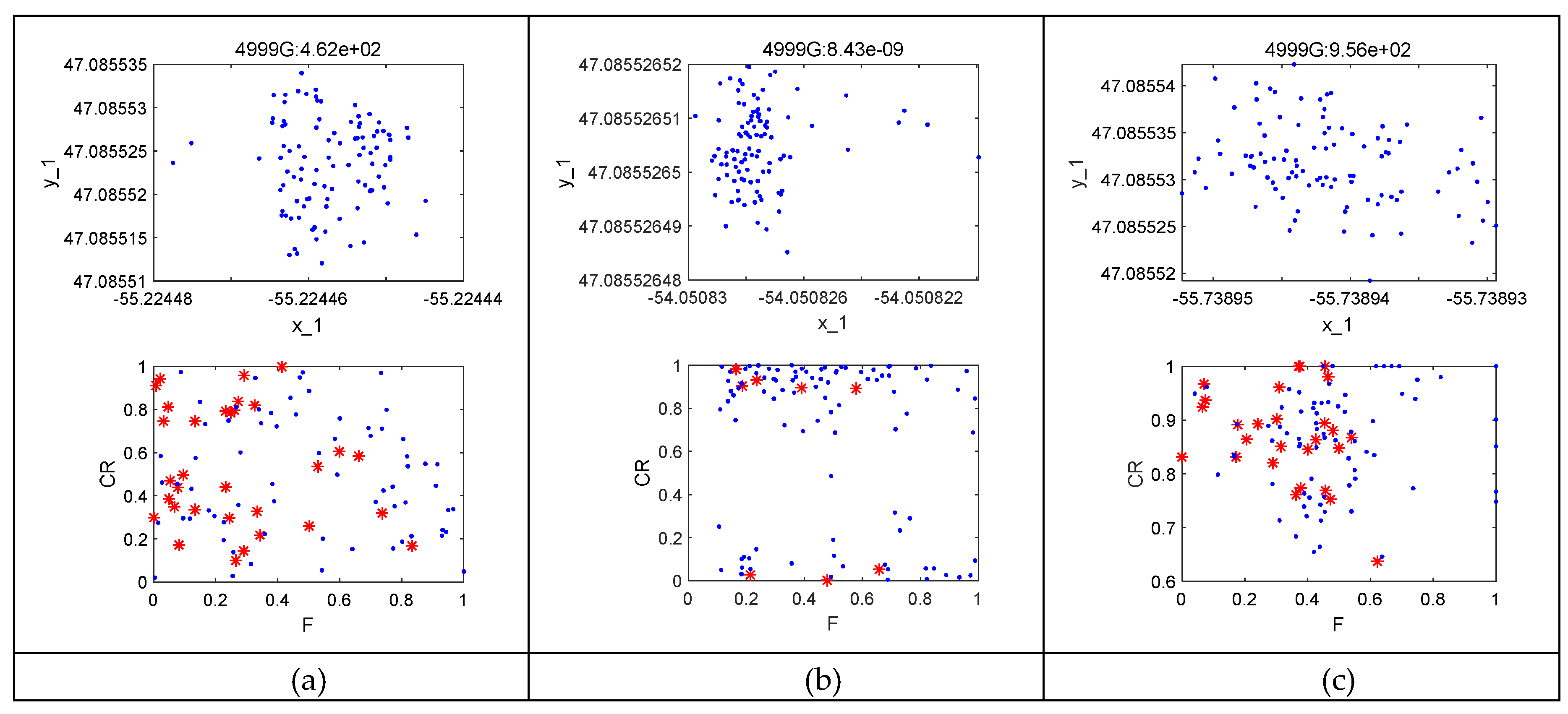
- The parameters of the random parameter strategy are evenly distributed regardless of the evolutionary state. There are evidently many parameter values that are not beneficial to evolution that affect the efficiency of the strategy.
- The population parameter distribution of the jDE parameter strategy gradually coincides with the distribution of successful parameter values along with the evolutionary process; however, the process is slower.
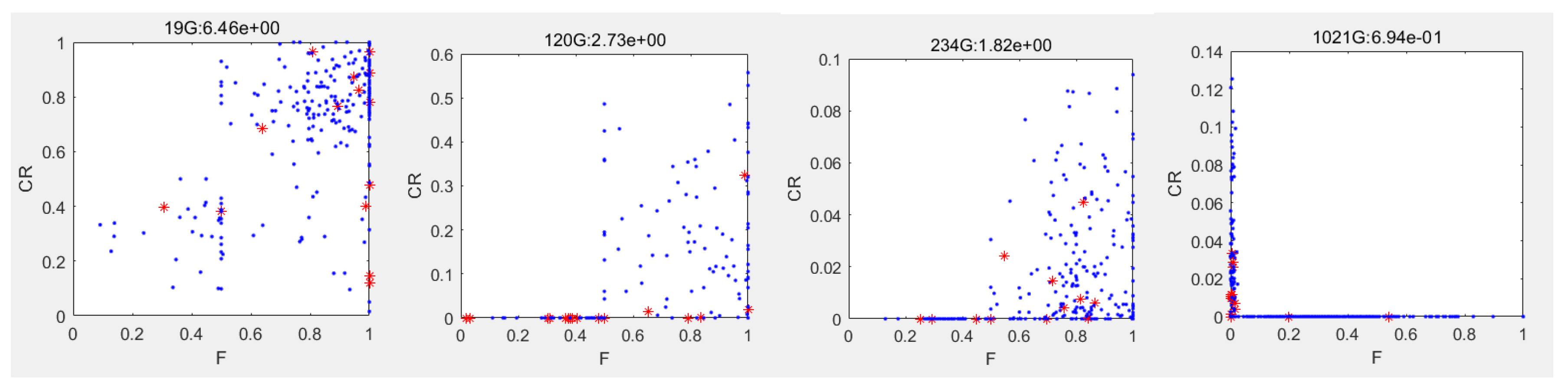
- The parameter distribution of the SHADE parameter strategy spreads around a center point, and the distribution is shifted by the difference between the mean of the successful parameter-values and the entire parameter-values. The SHADE parameter strategy enhances a part of the distribution of successful parameter values.
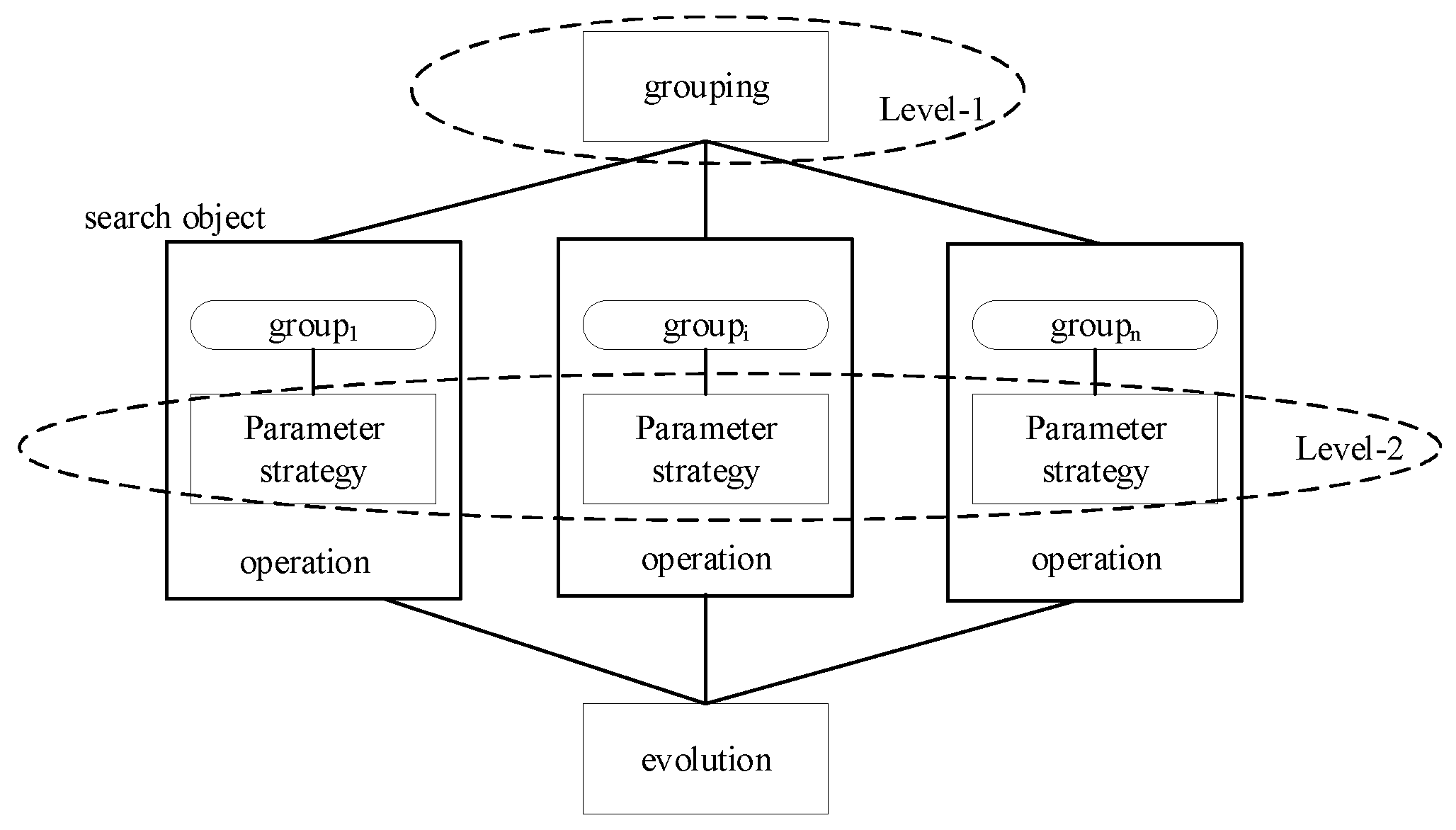
4. Two-Level Parameter Combination Framework
4.1. Search Object with Specific Parameter Region and Strategy
| Algorithm 1. Execute search object algorithm. |
| Input: STRinfo Output: offspring set, STRinfo.model 1: According to the STRinfo.group, assign the individual set. 2: foreach parameter strategy in STRinfo.pastrategies 3: Execute the parameter component with phase 2 to generate the parameter value set. 4: end foreach 5: Execute the operation (STRinfo.opstrategy) and return the offspring set. 6: Compute the objective of the offspring. 7: foreach parameter strategy in STRinfo.pastrategies 8: Execute the parameter component with phase 1 to collect information and construct the parameter strategy model. 9: end foreach. 10: Collect the algorithm evaluation information to generate STRinfo.model. |
4.2. Grouping for Search Object
4.2.1. Evaluation Model for Search Object
4.2.2. Collaboration-Based Grouping Method
4.2.3. Competition-Based Grouping Method
4.3. The Algorithm of the Framework
| Algorithm 2. The algorithm of the framework. |
| 1: Initialize the population. 2: Evaluate the individuals of the population 3: According to the design of search objects, create the runtime list of so with STRInfo. 4: while (not (termination condition)) 5: if (the first generation) 6: grouping the population according to the initial group size ratio (Igsr). 7: else 8: if t= =GroInt 9: t = 0; 10: execute grouping strategy (collaboration method or competition method) to adjust the group size of each search object. 11: grouping the population and assign the group to search object(so). 12: else 13: t = t + 1; 14: end if 15: end if 16: foreach soi in search object list 17: execute soi, generate the offspring and STRInfo.model(Algorithm 1) 18: end foreach 19: compute the model score of each search object (soState) 20: generate the next generation population according to population selection method. 21: execute the parameter component for population adjusting if needed. 22: end while |
5. Customizing Two Parameter Combination Strategies
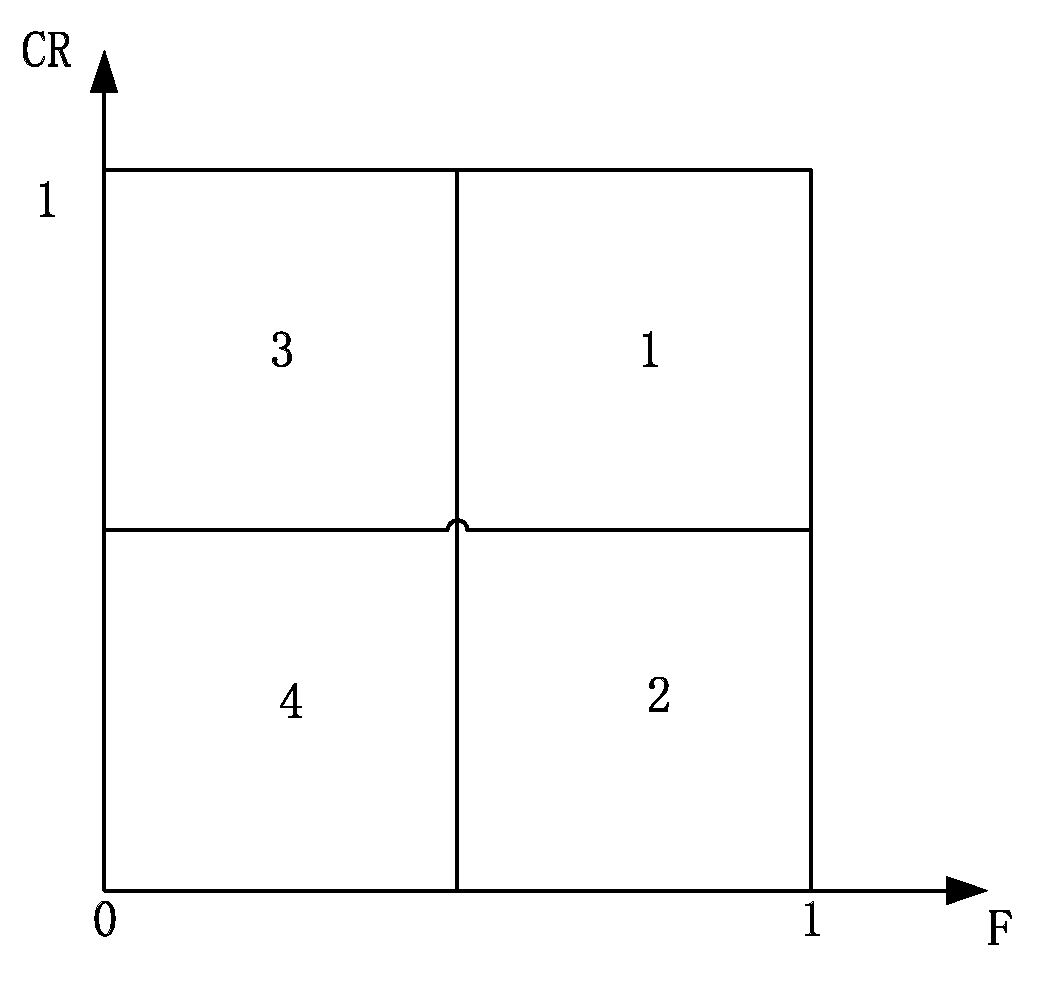
5.1. Combine Parameter Regions or Values for Single-Operation DE
- Region 5: F∈[0.1, 1], CR∈[0, 1]. This region consists of the entire range except for a very small F.
- Region 6: F∈[0, 1], CR∈[0, 1]. This region consists of the entire range.
5.2. Combine Different Parameter Strategies for Multi-Operation DE
6. Experiments and Discussion
- SHADE: The parameters for DE/current-to-pbest/1 operation are set to p = 0.1, archive-size = 2*NP, which is the same as that in the initial paper. The memory-size of the history list used by the parameter strategy is set as 6, referencing a previous study [24]. For parameter NP, we set the NP as 4D.
- PVCDE: The population size is set to NP = 5D for the purpose of grouping, with archive-size = 1.4*NP and memory-size = 6. The initial group size ratios (Igsr) are set as [8/10, 1/10, 1/10], and the basic proportions (Pbase) of all search objects in phase 1 are set to [7/10, 1/10, 1/10], which emphasizes so1. Every ten generations, the groups are reassigned, and the grouping method is random grouping. The switching conditions for stage 1 and 2 are 500 generations or the success rate of so1 (STRinfo1.model.s1) being less than 0.01.
- L-SHADE: the parameter settings is same as its initial settings in paper [18]. The population size is from 18D to 4, and the parameters for DE/current-to-pbest/1 operation are set to p = 0.11, archive size = 2.6*NP, and memory size = 6.
- L-PVCDE: the population size is from 18D to 10 for the grouping restriction. The initial group size ratios (Igsr) are set as [16/18, 1/10, 1/10], and the basic proportions of all search objects in stage 1 are set to [15/18, 1/18, 1/18]. The other settings are the same as PVCDE.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Bhadra, T.; Bandyopadhyay, S. Unsupervised feature selection using an improved version of Differential Evolution. Expert Syst. Appl. 2015, 42, 4042–4053. [Google Scholar] [CrossRef]
- Zorarpacı, E.; Özel, S.A. A hybrid approach of differential evolution and artificial bee colony for feature selection. Expert Syst. Appl. 2016, 62, 91–103. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Hybrid differential evolution with biogeography-based optimization algorithm for solution of economic emission load dispatch problems. Expert Syst. Appl. 2011, 38, 14001–14010. [Google Scholar] [CrossRef]
- Zhong, J.; Shen, M.; Zhang, J.; Chung, H.S.; Shi, Y.; Li, Y.A. differential evolution algorithm with dual populations for solving periodic railway timetable scheduling problem. IEEE Trans. Evol. Comput. 2013, 17, 512–527. [Google Scholar] [CrossRef]
- Karafotias, G.; Hoogendoorn, M.; Eiben, A.E. Parameter Control in Evolutionary Algorithms: Trends and Challenges. IEEE Trans. Evol. Comput. 2015, 19, 167–187. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Tran. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Das, S.; Mullick, S.S.; Suganthan, P.N. Recent advances in differential evolution—An updated survey. Swarm Evol. Comput. 2016, 27, 1–30. [Google Scholar] [CrossRef]
- Das, S.; Konar, A.; Chakraborty, U.K. Two Improved Differential Evolution Schemes for Faster Global Search. In Proceedings of the Genetic and Evolutionary Computation Conference, GECCO 2005, Washington, DC, USA, 25–29 June 2005; ACM: New York, NY, USA, 2005. [Google Scholar]
- Draa, A.; Bouzoubia, S.; Boukhalfa, I. A sinusoidal differential evolution algorithm for numerical optimization. Appl. Soft. Comput. 2015, 27, 99–126. [Google Scholar] [CrossRef]
- Tvrdík, J.; Poláková, R. Competitive differential evolution applied to CEC 2013 problems. In Proceedings of the IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013. [Google Scholar]
- Sarker, R.A.; Elsayed, S.M.; Ray, T. Differential evolution with dynamic parameters selection for optimization problems. IEEE Trans. Evol. Comput. 2014, 18, 689–707. [Google Scholar] [CrossRef]
- Zhang, J.; Sanderson, A.C. JADE: Adaptive Differential Evolution With Optional External Archive. IEEE Tran. Evol. Comput. 2009, 13, 945–958. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A. Success-history based parameter adaptation for differential evolution. In Proceedings of the IEEE Congress on Evolutionary Computation, Cancún, México, 20–23 June 2013. [Google Scholar]
- Wu, G.H.; Mallipeddi, R.; Suganthan, P.N.; Wang, R.; Chen, H. Differential evolution with multipopulation based ensemble of mutation strategies. Inf. Sci. 2016, 329, 329–345. [Google Scholar] [CrossRef]
- Islam, S.M.; Das, S.; Ghosh, S.; Roy, S.; Suganthan, P.N. An adaptive differential evolution algorithm with novel mutation and crossover strategies for global numerical optimization. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2012, 42, 482–500. [Google Scholar] [CrossRef]
- Cui, L.; Li, G.; Lin, Q. Adaptive differential evolution algorithm with novel mutation strategies in multiple sub-populations. Comput. Oper. Res. 2016, 67, 155–173. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A. Improving the search performance of SHADE using linear population size reduction. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC 2014), Beijing, China, 6–11 July 2014. [Google Scholar]
- Brest, J.; Maučec, M.S.; Bošković, B. iL-SHADE: Improved LSHADE algorithm for single objective real-parameter optimization. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016. [Google Scholar]
- Brest, J.; Maučec, M.S.; Bošković, B. Single objective real-parameter optimization: Algorithm jSO. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), San Sebastian, Spain, 5–8 June 2017. [Google Scholar]
- Brest, J.; Greiner, S.; Boskovic, B.; Mernik, M.; Zumer, V. Self-adapting control parameters in differential evolution: A comparative study on numerical benchmark problems. IEEE Trans. Evol. Comput. 2006, 10, 646–657. [Google Scholar] [CrossRef]
- Mallipeddi, R.; Suganthan, P.N.; Pan, Q.K.; Tasgetiren, M.F. Differential evolution algorithm with ensemble of parameters and mutation strategies. Appl. Soft. Comput. 2011, 11, 1670–1696. [Google Scholar] [CrossRef]
- Caraffini, F.; Kononova, A. Structural Bias in Differential Evolution: A preliminary study. In Proceedings of the Global Optimization Workshop, Leiden, The Netherlands, 18 October 2018. [Google Scholar]
- Daniela, Z. Parameter Adaptation in Differential Evolution by Controlling the Population Diversity. In Proceedings of the 4rd International Workshop on Symbolic and Numeric Algorithms for Scientific Computing, Timisoara, Romainia, 9–12 October 2002. [Google Scholar]
- Ghosh, A.; Das, S.; Mullick, S.S.; Mallipeddi, R.; Das, A.K. A switched parameter differential evolution with optional blending crossover for scalable numerical optimization. Appl. Soft. Comput. 2017, 57, 329–352. [Google Scholar] [CrossRef]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential evolution algorithm with strategy adaptation for global numerical optimization. IEEE Trans. Evol. Comput. 2009, 13, 398–417. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, Z.; Zhang, Q. Differential evolution with composite trial vector generation strategies and control parameters. IEEE Trans. Evol. Comput. 2011, 15, 55–66. [Google Scholar] [CrossRef]
- Elsayed, S.M.; Sarker, R.A.; Ray, T. Differential evolution with automatic parameter configuration for solving the CEC2013 competition on real-parameter optimization. In Proceedings of the IEEE Congress on Evolutionary Computation, Cancún, México, 20–23 June 2013. [Google Scholar]
- Tang, L.; Dong, Y.; Liu, J. Differential evolution with an individual-dependent mechanism. IEEE Trans. Evol. Comput. 2015, 19, 560–574. [Google Scholar] [CrossRef]
- Ghosh, A.; Das, S.; Chowdhury, A.; Giri, A. Improved differential evolution algorithm with fitness-based adaptation of the control parameters. Inf. Sci. 2011, 181, 3749–3765. [Google Scholar] [CrossRef]
- Tian, M.; Gao, X.; Dai, C. Differential evolution with improved individual-based parameter setting and selection strategy. Appl. Soft. Comput. 2017, 56, 286–297. [Google Scholar] [CrossRef]
- Liu, J.; Lampinen, J. A fuzzy adaptive differential evolution algorithm. Soft Comput. 2005, 9, 448–462. [Google Scholar] [CrossRef]
- Yu, W.; Shen, M.; Chen, W.; Zhan, Z.; Gong, Y.; Lin, Y.; Liu, O.; Zhang, J. Differential evolution with two-level parameter adaptation. IEEE Trans. Cybern. 2014, 44, 1080–1099. [Google Scholar] [CrossRef]
- Mallipeddi, R. Harmony search based parameter ensemble adaptation for differential evolution. J. Appl. Math. 2013, 2013, 750819. [Google Scholar] [CrossRef]
- Ugolotti, R.; Sani, L.; Cagnoni, S. What Can We Learn from Multi-Objective Meta-Optimization of Evolutionary Algorithms in Continuous Domains? Mathematics 2019, 7, 232. [Google Scholar] [CrossRef]
- Das, S.; Abraham, A.; Chakraborty, U.K.; Konar, A. Differential evolution using a neighborhood-based mutation operator. IEEE Trans. Evol. Comput. 2009, 13, 526–553. [Google Scholar] [CrossRef]
- Liu, G.; Xiong, C.; Guo, Z. Enhanced differential evolution using random-based sampling and neighborhood mutation. Soft. Comput. 2015, 19, 2173–2192. [Google Scholar] [CrossRef]
- Sun, G.; Cai, Y.; Wang, T.; Tian, H.; Wang, C.; Chen, Y. Differential evolution with individual-dependent topology adaptation. Inf. Sci. 2018, 450, 1–38. [Google Scholar] [CrossRef]
- Piotrowski, A.P. Review of Differential Evolution population size. Swarm Evol. Comput. 2017, 32, 1–24. [Google Scholar] [CrossRef]
- Brest, J.; Maucec, M.S. Population size reduction for the Differential Evolution algorithm. Appl. Intell. 2008, 29, 228–247. [Google Scholar] [CrossRef]
- Zhu, W.; Tang, Y.; Fang, J.A.; Zhang, W.B. Adaptive population tuning scheme for Differential Evolution. Inf. Sci. 2013, 223, 164–191. [Google Scholar] [CrossRef]
- Zhao, S.G.; Wang, X.; Chen, L.; Zhu, W. A novel self-adaptive Differential Evolution algorithm with population size adjustment scheme. Arab. J. Sci. Eng. 2014, 39, 6149–6174. [Google Scholar] [CrossRef]
- Liang, J.J.; Qu, B.Y.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the CEC 2014 Special Session and Competition on Single Objective Real-Parameter Numerical Optimization; Technical Report; Zhengzhou University and Nanyang Technological University: Singapore, 2013. [Google Scholar]
- LaTorre, A. A Framework for Hybrid Dynamic Evolutionary Algorithms: Multiple Offspring Sampling (MOS). Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2009. [Google Scholar]
- Caraffini, F.; Neri, F.; Epitropakis, M. HyperSPAM: A study on Hyper-heuristic Coordination Strategies in the Continuous Domain. Inf. Sci. 2019, 3, 186–202. [Google Scholar] [CrossRef]
- García, S.; Fernández, A.; Luengo, J.; Herrera, F. A study of statistical techniques and performance measures for genetics-based machine learning: Accuracy and interpretability. Soft. Comput. 2009, 13, 959–977. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region Combination Pattern | Result | Premature Convergence |
|---|---|---|
| (1) | 7.6e+02 | N |
| (2) | 1.0e+04 | N |
| (3) | 5.2e+03 | Y |
| (4) | 1.4e+03 | Y |
| (1,4) | 3.1e-03 | N |
| (1,2) | 6.0e+00 | N |
| (1,3) | 8.4e+02 | Y |
| (2,3) | 6.4e+02 | Y |
| (2,4) | 4.1e+03 | Y |
| (3,4) | 7.1e+02 | Y |
| (1,2,4) | 1.3e-01 | N |
| (1,3,4) | 2.0e+03 | Y |
| (1,2,3) | 3.5e+02 | N |
| (2,3,4) | 4.3e+03 | Y |
| (1,2,3,4) | 2.9e+02 | N |
| Stage | Search Object | Parameter | Parameter Scope | Parameter Control Strategy |
|---|---|---|---|---|
| exploration | so1 | F and CR | [0.5, 1] × [0.5, 1] (Region1) | SHADE |
| p | 0.1 | fixed | ||
| so2 | F and CR | [0, 0.5] × [0, 0.5] (Region4) | SHADE | |
| p | 0.1 | fixed | ||
| so3 | F andCR | [0.1, 1] × [0, 1] (Region5) | SHADE | |
| p | 0.5 | fixed | ||
| exploitation | so1 | F and CR | [0.5, 1] × [0, 1] (Region1∪Region2) | SHADE |
| p | 0.1 | fixed | ||
| so2 | F and CR | [0, 0.5] × [0, 0.5] (Region4) | SHADE | |
| p | 0.1 | fixed | ||
| so3 | F and CR | [0, 1] × [0, 1] (Region6) | SHADE | |
| p | 0.1 | fixed |
| Stage | Search Object | Parameter | Parameter Scope | Parameter Control Strategy |
|---|---|---|---|---|
| stage1 | so1 (DE/rand/1) | F and CR | [0.1, 1] × [0, 1] (Region5) | jDE |
| so2 (DE/current-to-pbest/1) | F and CR | [0.5, 1] × [0.5, 1] (Region1) | SHADE | |
| p | 0.5 | fixed | ||
| stage2 | so1(DE/rand/1) | F and CR | [0.1, 1] × [0, 1] (Region5) | jDE |
| so2 (DE/current-to-pbest/1) | F and CR | [0.1, 1] × [0, 1] (Region5) | SHADE | |
| p | 0.1 | fixed | ||
| stage3 | so1(DE/rand/1) | F and CR | [0.1, 1] × [0, 1] (Region5) | jDE |
| so2 (DE/current-to-pbest/1) | F and CR | [0, 1] × [0, 1] (Region6) | SHADE | |
| p | 0.1 | fixed |
| Fun | 30D | 50D | 100D | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SHADE Mean (std) | PVCDE Mean (std) | SHADE Mean (std) | PVCDE Mean (std) | SHADE Mean (std) | PVCDE Mean (std) | ||||
| 1 | 1.50e+03 (2.35e+03) | 3.68e-09 (2.63e-08) | − | 6.42e+04 (3.19e+04) | 1.31e+04 (1.03e+04) | − | 4.03e+05 (1.35e+05) | 3.25e+05 (9.86e+04) | − |
| 2 | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 8.00e-09 (1.60e-08) | 0.00e+00 (0.00e+00) | − |
| 3 | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 2.54e-03 (3.77e-03) | 2.57e-04 (1.83e-03) | − |
| 4 | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 2.52e+01 (3.72e+01) | 4.49e+01 (4.82e+01) | ≈ | 1.26e+02 (4.50e+01) | 1.71e+02 (3.06e+01) | + |
| 5 | 2.01e+01 (5.54e-02) | 2.00e+01 (7.46e-03) | − | 2.03e+01 (1.18e-01) | 2.03e+01 (4.59e-02) | − | 2.08e+01 (2.78e-02) | 2.07e+01 (3.23e-02) | − |
| 6 | 2.11e+00 (1.10e+00) | 3.08e-01 (1.42e+00) | − | 8.11e+00 (2.11e+00) | 2.67e-01 (5.60e-01) | − | 3.86e+01 (2.82e+00) | 4.15e+00 (2.19e+00) | − |
| 7 | 7.04e-03 (1.07e-02) | 0.00e+00 (0.00e+00) | − | 6.56e-03 (8.83e-03) | 0.00e+00 (0.00e+00) | − | 3.52e-03 (6.99e-03) | 0.00e+00 (0.00e+00) | − |
| 8 | 0.00e+00 (0.00e+00) | 0.00e+00 (0.00e+00) | ≈ | 1.15e-09 (8.19e-09) | 0.00e+00 (0.00e+00) | ≈ | 5.99e+01 (5.03e+00) | 3.59e+01 (2.53e+00) | − |
| 9 | 1.28e+01 (2.31e+00) | 1.82e+01 (2.83e+00) | + | 3.30e+01 (4.13e+00) | 3.93e+01 (3.53e+00) | + | 1.49e+02 (1.20e+01) | 1.41e+02 (1.02e+01) | − |
| 10 | 4.08e-04 (2.92e-03) | 3.82e-02 (5.36e-02) | + | 1.49e-01 (1.67e-01) | 4.28e+01 (6.66e+00) | + | 3.86e+02 (1.38e+02) | 1.82e+03 (1.75e+02) | + |
| 11 | 1.50e+03 (1.76e+02) | 1.55e+03 (2.08e+02) | ≈ | 4.37e+03 (3.77e+02) | 4.22e+03 (2.92e+02) | − | 1.55e+04 (5.75e+02) | 1.43e+04 (5.50e+02) | − |
| 12 | 1.86e-01 (3.17e-02) | 1.29e-01 (2.12e-02) | − | 3.07e-01 (4.32e-02) | 2.57e-01 (3.40e-02) | − | 8.17e-01 (5.36e-02) | 7.24e-01 (5.12e-02) | − |
| 13 | 1.68e-01 (2.39e-02) | 1.63e-01 (2.82e-02) | ≈ | 2.53e-01 (3.09e-02) | 2.34e-01 (2.96e-02) | − | 3.48e-01 (2.61e-02) | 3.17e-01 (3.00e-02) | − |
| 14 | 2.27e-01 (3.12e-02) | 2.12e-01 (2.95e-02) | − | 2.95e-01 (2.52e-02) | 2.43e-01 (4.12e-02) | − | 2.87e-01 (2.05e-02) | 2.71e-01 (1.70e-02) | − |
| 15 | 2.57e+00 (3.04e-01) | 2.89e+00 (2.65e-01) | + | 7.89e+00 (1.06e+00) | 7.54e+00 (6.50e-01) | ≈ | 2.95e+01 (3.81e+00) | 2.65e+01 (1.67e+00) | − |
| 16 | 9.19e+00 (4.52e-01) | 9.37e+00 (3.72e-01) | + | 1.76e+01 (3.88e-01) | 1.81e+01 (4.08e-01) | + | 4.07e+01 (4.08e-01) | 4.12e+01 (3.84e-01) | + |
| 17 | 5.85e+02 (2.61e+02) | 2.10e+02 (1.28e+02) | − | 1.83e+03 (4.03e+02) | 1.00e+03 (3.64e+02) | − | 1.62e+04 (7.09e+03) | 4.34e+03 (6.85e+02) | − |
| 18 | 3.33e+01 (1.72e+01) | 8.79e+00 (4.64e+00) | − | 1.20e+02 (2.22e+01) | 4.95e+01 (1.98e+01) | − | 2.54e+02 (3.72e+01) | 2.51e+02 (3.22e+01) | ≈ |
| 19 | 4.23e+00 (7.80e-01) | 3.73e+00 (7.06e-01) | − | 1.11e+01 (5.37e+00) | 1.09e+01 (1.30e+00) | ≈ | 1.01e+02 (8.56e+00) | 9.28e+01 (2.03e+00) | − |
| 20 | 1.29e+01 (7.30e+00) | 6.26e+00 (2.11e+00) | − | 6.91e+01 (3.16e+01) | 2.40e+01 (6.32e+00) | − | 4.63e+02 (1.00e+02) | 1.13e+02 (2.41e+01) | − |
| 21 | 1.76e+02 (1.08e+02) | 1.26e+02 (8.97e+01) | − | 7.91e+02 (2.37e+02) | 4.66e+02 (1.65e+02) | − | 2.47e+03 (7.58e+02) | 1.35e+03 (4.02e+02) | − |
| 22 | 8.42e+01 (5.81e+01) | 8.38e+01 (5.94e+01) | ≈ | 2.92e+02 (1.15e+02) | 3.17e+02 (1.04e+02) | ≈ | 1.68e+03 (2.71e+02) | 1.58e+03 (2.36e+02) | − |
| 23 | 3.15e+02 (4.16e-13) | 3.15e+02 (4.16e-13) | ≈ | 3.44e+02 (3.84e-13) | 3.44e+02 (4.43e-13) | + | 3.48e+02 (3.79e-13) | 3.48e+02 (1.78e-13) | ≈ |
| 24 | 2.28e+02 (4.97e+00) | 2.24e+02 (2.83e+00) | − | 2.76e+02 (1.76e+00) | 2.73e+02 (1.88e+00) | − | 3.94e+02 (4.72e+00) | 3.87e+02 (2.99e+00) | − |
| 25 | 2.03e+02 (7.10e-01) | 2.03e+02 (2.76e-01) | − | 2.11e+02 (6.98e+00) | 2.06e+02 (5.38e-01) | − | 2.06e+02 (1.41e+01) | 2.18e+02 (3.85e+00) | + |
| 26 | 1.00e+02 (3.12e-02) | 1.00e+02 (2.64e-02) | ≈ | 1.04e+02 (1.96e+01) | 1.00e+02 (2.59e-02) | ≈ | 2.00e+02 (3.04e-02) | 2.00e+02 (3.76e-02) | ≈ |
| 27 | 3.51e+02 (3.81e+01) | 3.09e+02 (2.58e+01) | − | 5.12e+02 (5.62e+01) | 3.43e+02 (3.26e+01) | − | 1.06e+03 (7.26e+01) | 3.51e+02 (3.96e+01) | − |
| 28 | 8.49e+02 (3.61e+01) | 8.25e+02 (4.37e+01) | − | 1.19e+03 (5.05e+01) | 1.12e+03 (3.78e+01) | − | 2.37e+03 (1.90e+02) | 2.15e+03 (1.28e+02) | − |
| 29 | 6.75e+02 (1.41e+02) | 7.19e+02 (6.15e+00) | ≈ | 8.11e+02 (5.49e+01) | 8.08e+02 (5.40e+01) | ≈ | 9.42e+02 (1.42e+02) | 7.89e+02 (9.75e+01) | − |
| 30 | 9.60e+02 (3.77e+02) | 1.49e+03 (7.07e+02) | + | 9.65e+03 (8.48e+02) | 9.13e+03 (6.15e+02) | − | 5.78e+03 (1.07e+03) | 7.46e+03 (1.14e+03) | + |
| Rank sum test | +5 −15 ≈10 | +4 −17 ≈9 | +5 −22 ≈3 | ||||||
| Fun | L-SHADE | L-PVCDE | |||
|---|---|---|---|---|---|
| Mean | Std | Mean | Std | ||
| 1 | 1.03E+03 | 9.21E+02 | 5.47E-05 | 8.55E-05 | − |
| 2 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | ≈ |
| 3 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | ≈ |
| 4 | 4.43E+01 | 4.78E+01 | 5.17E+01 | 5.00E+01 | − |
| 5 | 2.03E+01 | 3.23E-02 | 2.00E+01 | 5.53E-03 | − |
| 6 | 4.17E-01 | 6.99E-01 | 7.13E-04 | 5.03E-04 | − |
| 7 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | ≈ |
| 8 | 9.81E-10 | 4.50E-09 | 0.00E+00 | 0.00E+00 | − |
| 9 | 1.09E+01 | 1.90E+00 | 3.09E+01 | 4.26E+00 | + |
| 10 | 1.12E-01 | 3.72E-02 | 2.07E+00 | 7.60E-01 | + |
| 11 | 3.32E+03 | 3.24E+02 | 3.29E+03 | 3.09E+02 | ≈ |
| 12 | 2.08E-01 | 2.93E-02 | 1.25E-01 | 2.00E-02 | − |
| 13 | 1.64E-01 | 2.37E-02 | 2.24E-01 | 2.14E-02 | + |
| 14 | 3.08E-01 | 2.35E-02 | 1.76E-01 | 5.62E-02 | − |
| 15 | 5.20E+00 | 3.92E-01 | 5.72E+00 | 6.76E-01 | + |
| 16 | 1.69E+01 | 4.18E-01 | 1.72E+01 | 4.69E-01 | + |
| 17 | 1.34E+03 | 3.43E+02 | 3.02E+02 | 1.23E+02 | − |
| 18 | 9.83E+01 | 1.19E+01 | 6.33E+00 | 1.92E+00 | − |
| 19 | 8.84E+00 | 1.85E+00 | 9.46E+00 | 6.68E-01 | ≈ |
| 20 | 1.37E+01 | 3.90E+00 | 6.81E+00 | 1.67E+00 | − |
| 21 | 4.65E+02 | 1.38E+02 | 2.44E+02 | 1.17E+02 | − |
| 22 | 1.51E+02 | 7.92E+01 | 1.42E+02 | 9.04E+01 | ≈ |
| 23 | 3.44E+02 | 1.16E-13 | 3.44E+02 | 2.11E-13 | + |
| 24 | 2.75E+02 | 5.47E-01 | 2.69E+02 | 1.94E+00 | − |
| 25 | 2.05E+02 | 2.83E-01 | 2.05E+02 | 1.06E-01 | − |
| 26 | 1.00E+02 | 1.96E-02 | 1.00E+02 | 1.50E-02 | + |
| 27 | 3.44E+02 | 3.40E+01 | 3.16E+02 | 2.00E+01 | − |
| 28 | 1.12E+03 | 2.71E+01 | 1.08E+03 | 2.61E+01 | − |
| 29 | 8.02E+02 | 4.26E+01 | 8.03E+02 | 4.06E+01 | ≈ |
| 30 | 8.60E+03 | 4.82E+02 | 8.48E+03 | 3.43E+02 | − |
| Rank sum test | +7 −16 ≈7 | ||||
| Fun | SHADE Mean (Std) | jDE Mean (Std) | EPSDE Mean (Std) | MPEDE Mean (Std) | CoDE Mean (Std) | PSCDE Mean (Std) | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 3.27e+04 (2.22e+04) | ≈ | 4.56e+05 (2.14e+05) | − | 3.02e+06 (5.37e+06) | − | 4.52e+04 (2.72e+04) | ≈ | 2.19E+05 (1.11E+05) | − | 4.15E+04 (2.52E+04) |
| 2 | 0.00e+00 (0.00e+00) | ≈ | 1.21e-08 (2.62e-08) | − | 1.01e-08 (1.73e-08) | − | 0.00e+00 (0.00e+00) | ≈ | 1.43E+02 (2.82E+02) | − | 0.00E+00 (0.00E+00) |
| 3 | 1.09e-03 (2.39e-03) | − | 3.65e-09 (9.57e-09) | − | 5.53e-07 (1.52e-06) | − | 7.74e-05 (1.33e-04) | − | 3.71E+01 (6.42E+01) | − | 0.00E+00 (0.00E+00) |
| 4 | 2.28e+01 (3.82e+01) | ≈ | 8.99e+01 (7.64e+00) | − | 3.69e+01 (3.61e+01) | ≈ | 1.26e+01 (2.51e+01) | ≈ | 2.43E+01 (2.98E+01) | ≈ | 3.74E+01 (4.88E+01) |
| 5 | 2.01e+01 (6.66e-02) | − | 2.04e+01 (2.56e-02) | − | 2.06e+01 (8.37e-02) | − | 2.05e+01 (4.33e-02) | − | 2.00E+01 (5.34E-02) | + | 2.00E+01 (4.77E-03) |
| 6 | 1.47e+01 (3.39e+00) | − | 2.69e+01 (2.41e+00) | − | 3.07e+01 (2.88e+00) | − | 6.67e+00 (2.11e+00) | − | 9.44E+00 (3.89E+00) | − | 1.48E+00 (1.98E+00) |
| 7 | 1.04e-02 (1.00e-02) | − | 0.00e+00 (0.00e+00) | ≈ | 5.74e-03 (9.26e-03) | − | 1.06e-03 (2.65e-03) | − | 2.81E-03 (5.58E-03) | − | 0.00E+00 (0.00E+00) |
| 8 | 0.00e+00 (0.00e+00) | ≈ | 0.00e+00 (0.00e+00) | ≈ | 4.74e-02 (2.17e-01) | − | 0.00e+00 (0.00e+00) | ≈ | 3.32E-01 (5.74E-01) | − | 0.00E+00 (0.00E+00) |
| 9 | 3.69e+01 (7.98e+00) | + | 9.77e+01 (1.23e+01) | − | 1.47e+02 (1.72e+01) | − | 5.27e+01 (1.31e+01) | − | 7.47E+01 (1.19E+01) | − | 4.57E+01 (6.47E+00) |
| 10 | 5.95e-04 (2.73e-03) | + | 2.97e-03 (5.45e-03) | + | 1.60e+00 (2.99e+00) | − | 5.21e-01 (2.15e-01) | − | 5.72E+00 (2.75E+00) | − | 1.67E-02 (1.82E-02) |
| 11 | 3.48e+03 (2.98e+02) | + | 5.21e+03 (5.01e+02) | − | 7.49e+03 (7.67e+02) | − | 5.05e+03 (9.15e+02) | − | 4.62E+03 (8.37E+02) | − | 3.75E+03 (3.00E+02) |
| 12 | 1.64e-01 (2.24e-02) | ≈ | 4.58e-01 (4.15e-02) | − | 8.42e-01 (2.35e-01) | − | 5.22e-01 (1.08e-01) | − | 7.56E-02 (3.88E-02) | + | 1.67E-01 (2.73E-02) |
| 13 | 3.27e-01 (5.81e-02) | − | 3.92e-01 (3.83e-02) | − | 3.71e-01 (5.48e-02) | − | 2.70e-01 (3.14e-02) | ≈ | 3.29E-01 (4.11E-02) | − | 2.58E-01 (3.22E-02) |
| 14 | 3.06e-01 (3.32e-02) | − | 3.35e-01 (4.48e-02) | − | 3.03e-01 (3.54e-02) | − | 2.96e-01 (2.48e-02) | − | 2.88E-01 (3.50E-02) | − | 2.71E-01 (9.43E-02) |
| 15 | 1.02e+01 (2.75e+00) | − | 1.17e+01 (1.55e+00) | − | 1.78e+01 (1.93e+00) | − | 6.55e+00 (1.76e+00) | ≈ | 6.60E+00 (1.29E+00) | ≈ | 6.50E+00 (9.89E-01) |
| 16 | 1.75e+01 (7.43e-01) | + | 1.84e+01 (4.00e-01) | − | 1.96e+01 (6.96e-01) | − | 1.84e+01 (6.68e-01) | ≈ | 1.81E+01 (1.04E+00) | ≈ | 1.80E+01 (7.90E-01) |
| 17 | 2.79e+03 (8.57e+02) | − | 2.22e+04 (1.82e+04) | − | 1.72e+05 (6.22e+05) | − | 1.91e+03 (5.12e+02) | ≈ | 1.59E+04 (1.26E+04) | − | 2.42E+03 (1.49E+03) |
| 18 | 1.50e+02 (2.28e+01) | − | 4.51e+02 (6.11e+02) | − | 5.37e+02 (6.35e+02) | − | 1.27e+02 (2.52e+01) | − | 2.98E+02 (3.27E+02) | − | 6.10E+01 (3.10E+01) |
| 19 | 1.41e+01 (6.86e+00) | − | 1.26e+01 (1.88e+00) | − | 2.74e+01 (1.40e+01) | − | 7.28e+00 (1.24e+00) | + | 6.23E+00 (1.28E+00) | + | 9.52E+00 (1.94E+00) |
| 20 | 1.97e+02 (8.13e+01) | − | 5.41e+01 (2.10e+01) | − | 2.27e+02 (1.92e+02) | − | 5.66e+01 (3.73e+01) | − | 2.61E+02 (3.23E+02) | − | 2.46E+01 (8.40E+00) |
| 21 | 1.14e+03 (3.57e+02) | − | 1.14e+04 (1.33e+04) | − | 2.69e+04 (2.89e+04) | − | 8.23e+02 (2.48e+02) | − | 6.86E+03 (4.26E+03) | − | 6.23E+02 (2.28E+02) |
| 22 | 3.60e+02 (1.34e+02) | − | 5.35e+02 (1.56e+02) | − | 5.16e+02 (1.57e+02) | − | 5.39e+02 (2.18e+02) | − | 6.39E+02 (1.80E+02) | − | 2.79E+02 (1.38E+02) |
| 23 | 3.44e+02 (2.37e-13) | − | 3.44e+02 (2.26e-13) | − | 3.44e+02 (7.00e-13) | − | 3.44e+02 (2.26e-13) | − | 3.44E+02 (1.75E-13) | ≈ | 3.44E+02 (2.21E-13) |
| 24 | 2.79e+02 (2.65e+00) | − | 2.68e+02 (2.49e+00) | + | 2.74e+02 (3.48e+00) | − | 2.75e+02 (1.46e+00) | − | 2.71E+02 (2.34E+00) | ≈ | 2.71E+02 (2.56E+00) |
| 25 | 2.20e+02 (8.23e+00) | − | 2.08e+02 (2.17e+00) | − | 2.18e+02 (5.63e+00) | − | 2.00e+02 (9.44e-02) | + | 2.08E+02 (4.37E+00) | − | 2.06E+02 (7.29E-01) |
| 26 | 1.10e+02 (3.00e+01) | − | 1.00e+02 (4.41e-02) | − | 1.00e+02 (1.52e-01) | − | 1.15e+02 (3.58e+01) | ≈ | 1.19E+02 (4.01E+01) | − | 1.00E+02 (4.08E-02) |
| 27 | 6.95e+02 (6.74e+01) | − | 4.46e+02 (7.74e+01) | − | 8.28e+02 (1.72e+02) | − | 4.67e+02 (7.07e+01) | − | 5.31E+02 (7.23E+01) | − | 3.64E+02 (4.34E+01) |
| 28 | 1.27e+03 (9.81e+01) | − | 1.12e+03 (4.30e+01) | ≈ | 1.48e+03 (1.89e+02) | − | 1.15e+03 (5.30e+01) | − | 1.20E+03 (6.20E+01) | − | 1.10E+03 (5.10E+01) |
| 29 | 9.06e+02 (8.45e+01) | − | 1.11e+03 (2.54e+02) | − | 1.06e+03 (2.48e+02) | − | 8.06e+02 (6.50e+01) | + | 9.63E+02 (7.34E+01) | − | 8.61E+02 (1.00E+02) |
| 30 | 1.02e+04 (1.09e+03) | − | 8.63e+03 (4.78e+02) | + | 9.33e+03 (3.11e+02) | − | 9.56e+03 (7.62e+02) | − | 8.96E+03 (4.95E+02) | ≈ | 8.99e+03 (6.23e+02) |
| Rank sum test | +4 −21 ≈5 | +3 −24 ≈3 | +0 −29 ≈1 | +3 −18 ≈9 | +3 −21 ≈6 |
| j | Optimizer | Rank | zj | Pj | δ/j | Hypothesis |
|---|---|---|---|---|---|---|
| 1 | L-SHADE | 3.60 | 1.5606e+00 | 1.20e-01 | 5.00e-2 | Accepted |
| 2 | PVCDE | 4.117 | 2.2258e+00 | 2.65e-02 | 2.50e-2 | Accepted |
| 3 | PSCDE | 4.133 | 2.2386e+00 | 2.52e-02 | 1.67e-2 | Accepted |
| 4 | SHADE200 | 5.817 | 4.4005e+00 | 1.12e-05 | 1.25e-2 | Rejected |
| 5 | MPEDE | 5.917 | 4.5284e+00 | 6.16e-06 | 1.00e-2 | Rejected |
| 6 | SHADE100 | 6.483 | 5.2447e+00 | 1.57e-07 | 8.33e-3 | Rejected |
| 7 | CoDE | 6.867 | 5.7436e+00 | 9.70e-09 | 7.14e-3 | Rejected |
| 8 | jDE | 7.050 | 5.9739e+00 | 2.37e-09 | 5.00e-2 | Rejected |
| 9 | EPSDE | 8.633 | 7.9950e+00 | 1.33e-15 | 2.50e-2 | Rejected |
| Algorithm Subset | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||
| algorithm | L-PVCDE | 2.383 | |||
| L-SHADE | 3.60 | 3.60 | |||
| PVCDE | 4.117 | ||||
| PSCDE | 4.133 | ||||
| SHADE200 | 5.817 | ||||
| MPEDE | 5.917 | ||||
| SHADE100 | 6.483 | ||||
| CoDE | 6.867 | ||||
| jDE | 7.050 | ||||
| EPSDE | 8.633 | ||||
| p-value | 0.100 | 0.284 | 0.045 | ||
| Adjusted p-value | 0.411 | 0.672 | 0.08 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Dong, Z. Parameter Combination Framework for the Differential Evolution Algorithm. Algorithms 2019, 12, 71. https://doi.org/10.3390/a12040071
Zhang J, Dong Z. Parameter Combination Framework for the Differential Evolution Algorithm. Algorithms. 2019; 12(4):71. https://doi.org/10.3390/a12040071
Chicago/Turabian StyleZhang, Jinghua, and Ze Dong. 2019. "Parameter Combination Framework for the Differential Evolution Algorithm" Algorithms 12, no. 4: 71. https://doi.org/10.3390/a12040071
APA StyleZhang, J., & Dong, Z. (2019). Parameter Combination Framework for the Differential Evolution Algorithm. Algorithms, 12(4), 71. https://doi.org/10.3390/a12040071