1. Introduction
The progression of longevity is forcing humanity to confront various unprecedented social problems. In hyper-aged societies, both healthy and unhealthy life expectancy lifespans are increasing year by year [
1]. Elderly people with longevity invariably spend longer periods of their second life outside their homes because they are living longer without severe disability [
2]. Hospitals and nursing-care facilities are now confronting daunting labor shortages in terms of medical doctors, nurses and caretakers. Especially during nighttime, labor shortages can lead to accidents of various types, particularly related to numerous fall and tumble risks. According to a report by Mita et al. [
3], fall accidents occurred as approximately half the total number of accidents that occur among elderly people at nursing-care facilities. Most fall accidents occurred when patients left their own bed.
Providing suitable solutions with assessment primarily requires fall accident prevention. Recently, bed-leaving sensors have come to be used widely at hospitals and nursing-care facilities to prevent fall-related behaviors in advance. A method of detecting abnormal behavior patterns has been proposed for monitoring sleeping elderly people [
4]. One can imagine that in a psychiatric ward, however, it would be unrealistic to use a camera without some special justification. Especially for hospitals and nursing-care facilities, the use of cameras for monitoring patients is limited for reasons of privacy and morality, except for intensive care units or special wards for infectious diseases. To assess privacy considerations, a fall detection method using radio-frequency identification devices (RFIDs) has been proposed to detect changes of electrical intensity [
5]. Nevertheless, detection using that method is limited to a person’s status after a fall. For the development of bed-leaving sensors, various factors exist for consideration in terms of system reliability, stability, durability, initial and maintenance cost, detection speed, privacy, and quality of life (QoL) for patients.
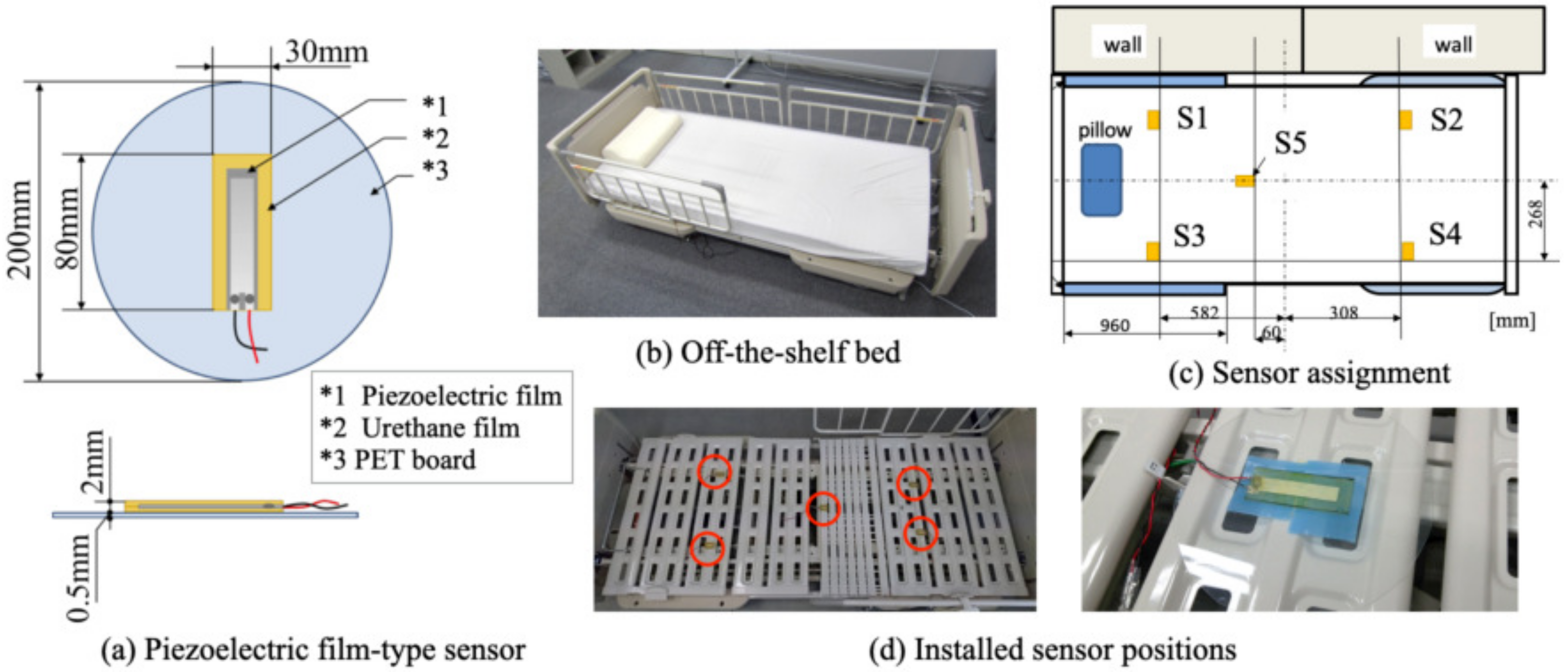
We proposed a bed-leaving sensor system [
6] using piezoelectric films bound with acrylic resin boards to detect pressure. An important benefit of this approach is that it can be installed in off-the-shelf beds. Sensors installed between a bed and a cover can detect a person’s behaviors. We evaluated basic sensor characteristics and the relation between accuracy and body parameters such as the weight and height of subjects [
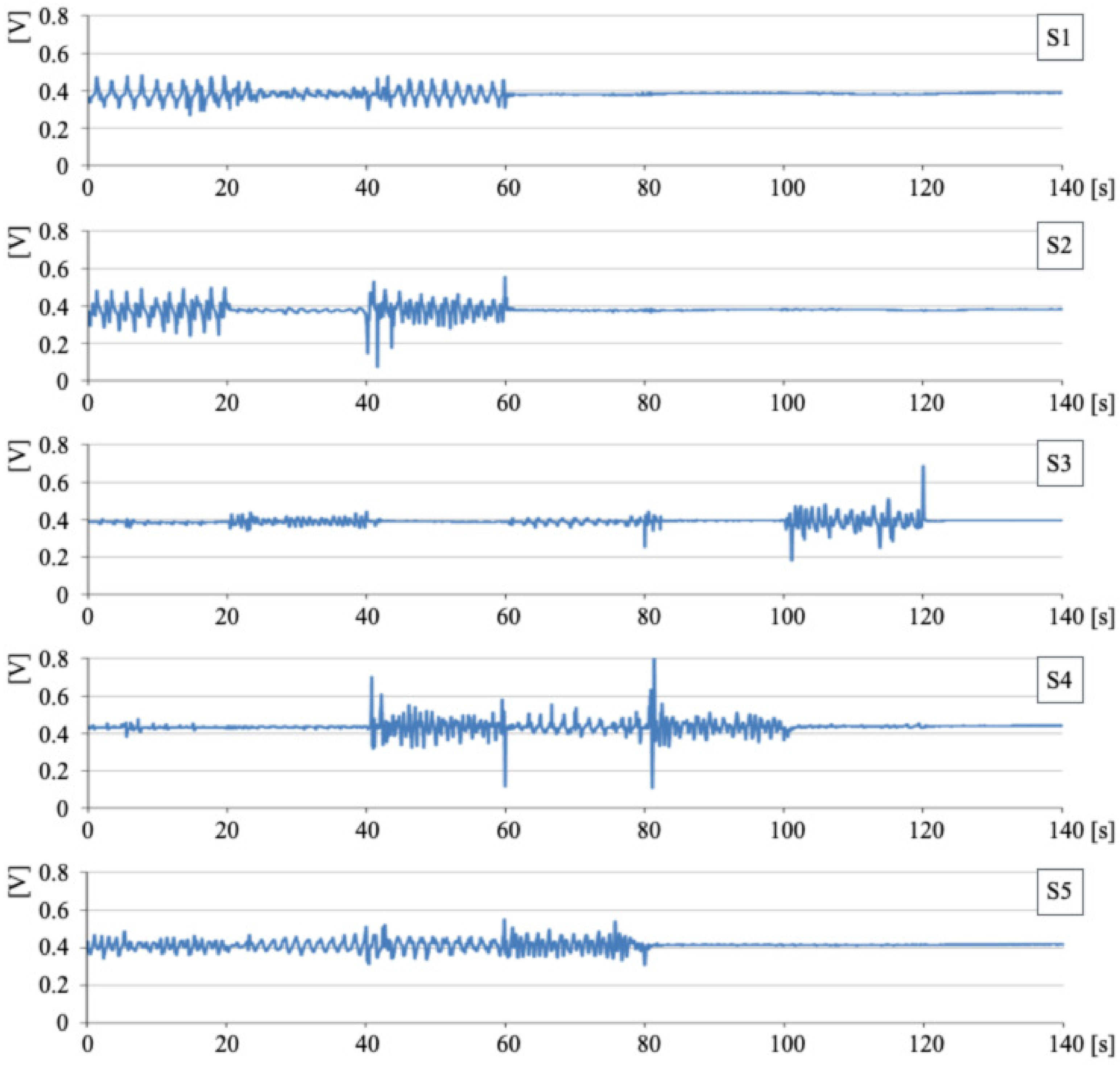
6]. Moreover, we evaluated our originally developed sensor system using discontinuous datasets that comprised random behavior patterns [
6]. However, counter-propagation networks (CPNs) [
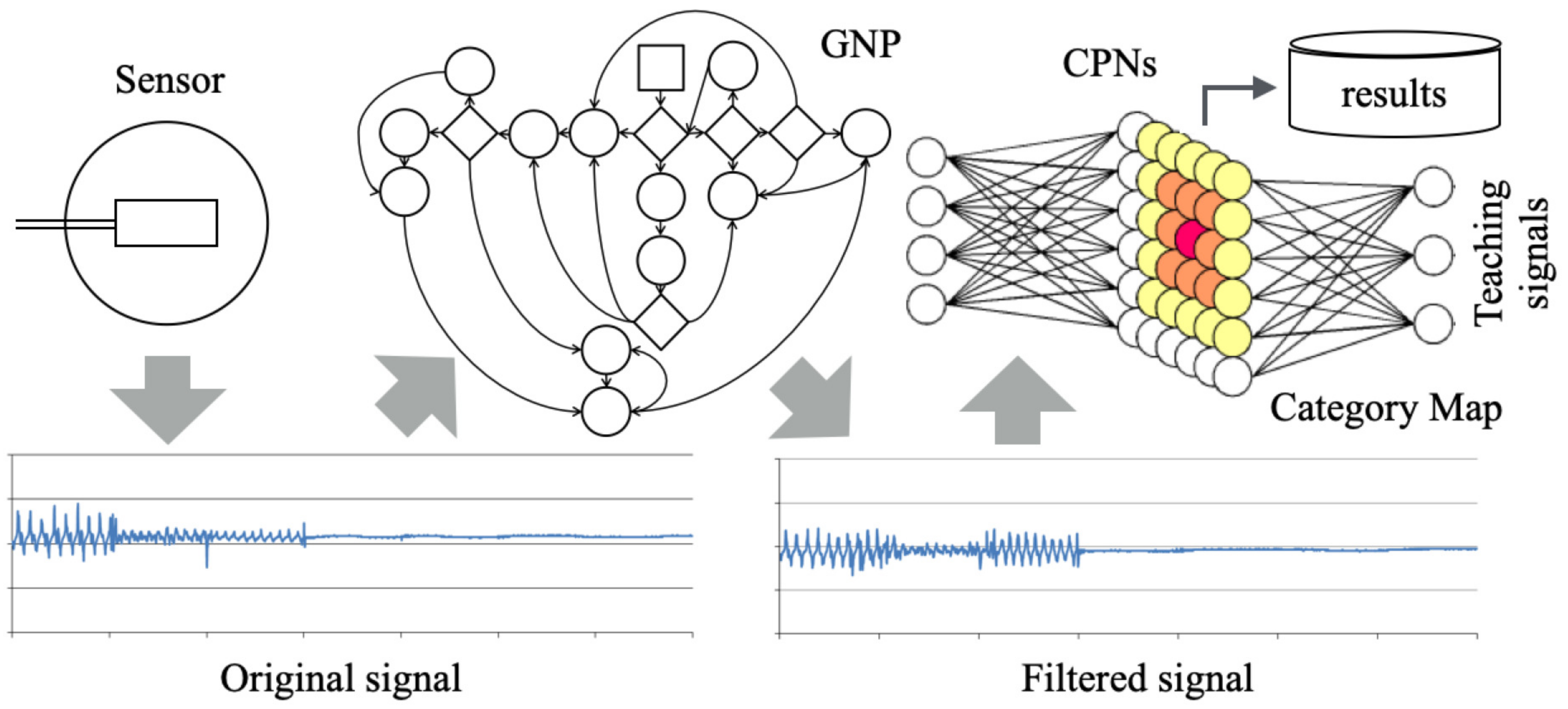
7] used for bed-leaving behavior recognition are insufficient to incorporate individual differences in physique such as weight and height. Especially for low-weight subjects, recognition accuracies were dramatically lower. To address this difficulty, we propose a method for automatically generating a filter set for shaping sensor signals based on evolutionary learning (EL) to demonstrate automatic sensor calibration according to subjects.
The remainder of the paper is structured as follows—in
Section 2, related studies of EL-based calibration methods are reviewed for improving classification and recognition accuracy.
Section 3 and
Section 4 respectively present our proposed method and our original sensor signal datasets. Subsequently,
Section 5 and
Section 6 present a preliminary experiment result obtained using a dataset obtained from a particular sensor, in addition to application experiment results obtained using three datasets obtained from one person for whom low initial recognition accuracy was obtained compared to those of other experiment participants.
Section 7 presents our analyses of the properties of parameters and node changes for additional optimization. Finally,
Section 8 concludes our presentation of the present work and highlights future work. As described herein, we use our proposed fundamental method with originally developed sensors of two types [
8]. To explain our present study, we have included additional details in
Section 2,
Section 6 and
Section 7.
2. Related Studies
As a framework for resolving difficulties combined with learning, inferring, and optimizing, EL-based methods are used widely in numerous applications [
9]. Song et al. [
10] proposed a method to generate filters used for electrocardiogram signals based on a genetic algorithm (GA) [
11]. The limitation of GAs is that they are merely applicable to parameter optimization. Koza [
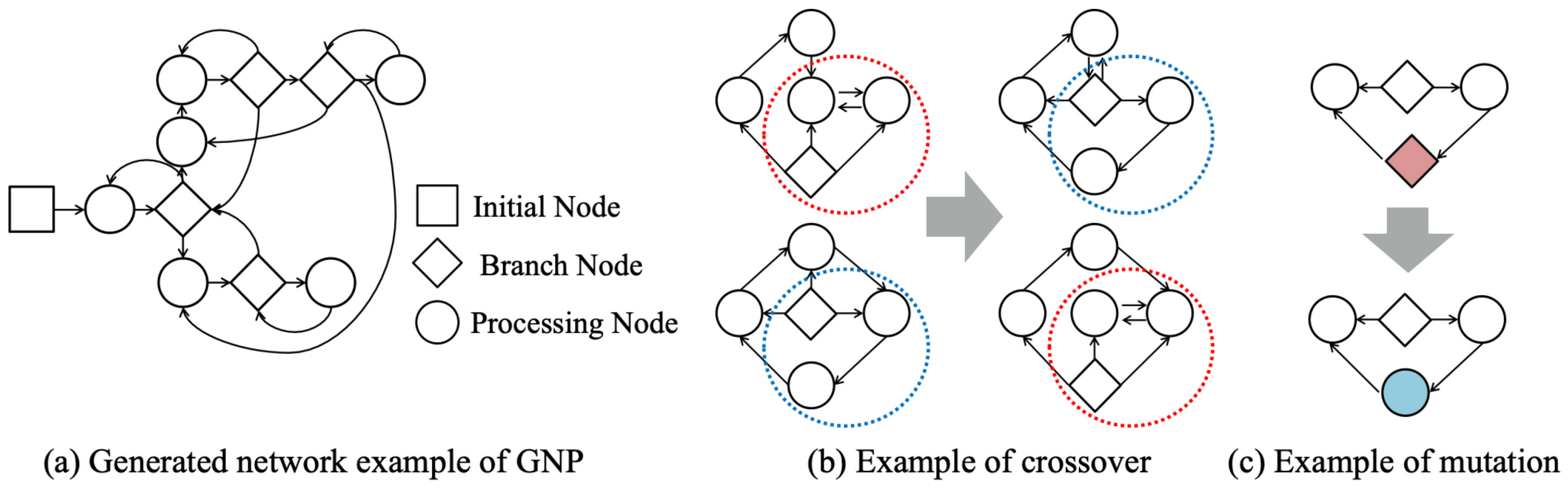
12] proposed genetic programming (GP) for use as a unified method to evolve programs affected by living things. To apply program generation, learning, reasoning, and conceptual formation, GP can be extended to accommodate a structural representation of GA genotypes. Moreover, GP can express data structures and programs as trees and graphs. For an extension to graph structures, genetic network programming (GNP) was proposed for efficient searching while avoiding tree bloat.
As pioneer work, Katagiri et al. [
13,
14] and Hirasawa et al. [
15] have proposed original frameworks of GNP that obtained intelligent behavior sequences for evolutionary robotics. Furthermore, they automatically designed complex systems based on evolutionary optimization techniques such as GA and GP. They [
16] evaluated GNP using the partially observable Markov decision process (POMDP) problem developed by Goldman et al. [
17]. The experimentally obtained simulation results elucidated that GNP evolved more effectively than GP. Especially, premature convergence occurs only rarely in GNP compared to its more common occurrence in GP. Moreover, the fitness of GNP has been reported as higher than that of GP from the initial generation.
Mabu et al. [
18] combined GNP with reinforcement learning [
19] to create dynamic graph structures. They also used the POMDP problem [
17] for benchmarking. The experimentally obtained results demonstrated that their method presents advantages over conventional methods based on GP and EP. Moreover, Chen et al. [
20] combined GNP with Sarsa learning [
21] for stock market trading to judge the timing of buying and selling. The experimentally obtained simulation results obtained using stock price datasets of 16 brands during four years clarified that the fitness and profits of their composed method were higher than the existing stock prediction methods.
Li et al. [
22] combined GNP with distributed estimation algorithms to solve traffic prediction problems based on class association rule mining. They used a probabilistic model that enhanced ultimate objective evolution. The experimentally obtained simulation results revealed that their method extracted class rules more effectively, especially for a case of an increased number of class association candidate rules. Moreover, the classification accuracy of their method achieved sufficient results for traffic prediction systems. Li et al. [
23] also combined GNP with a hybrid probabilistic model-building algorithm to avoid premature convergence and local optima while maintaining population diversity. Their experimentally obtained simulation results, evaluated using a small autonomous robot, demonstrated that their method achieved better performance than any conventional algorithm.
Wedashwara et al. [
24] combined GNP with standard dynamic programming to solve knapsack problems [
25]. Their method explored suitable combinations of attributes to create clustering and distributed rules. The experimentally obtained simulation results obtained using six benchmark datasets obtained from machine-learning (ML) repositories clarified that their method presents advantages over the use of conventional clustering algorithms such as
k-means, hierarchical clustering, fuzzy C means, and affinity propagation. Moreover, their method was found to be suitable for offline processing that specifically emphasizes optimal results rather than short processing time.
Mabu et al. [
26] combined GNP with fuzzy set theory [
27] for the detection of network intrusions. Experimentally obtained results using two benchmark datasets revealed that their method provided competitively high detection rates when compared with other ML techniques and GNP with the approach of a current cross-industry standard processing for data mining [
28]. As the latest study, Mabe et al. [
29] combined GNP with a semisupervised learning framework to extract class association rules from a small number of labeled data and from numerous unlabeled data. The experimentally obtained results obtained using several benchmark datasets revealed the classification accuracy of their method as superior to that of conventional methods.
As a graphical model that optimizes parameters and processing structures, GNP is highly independent of classifiers and recognizers. For those reasons, GNP is suitable for combining various existing methods to improve accuracy, especially in practical problems.
8. Conclusions
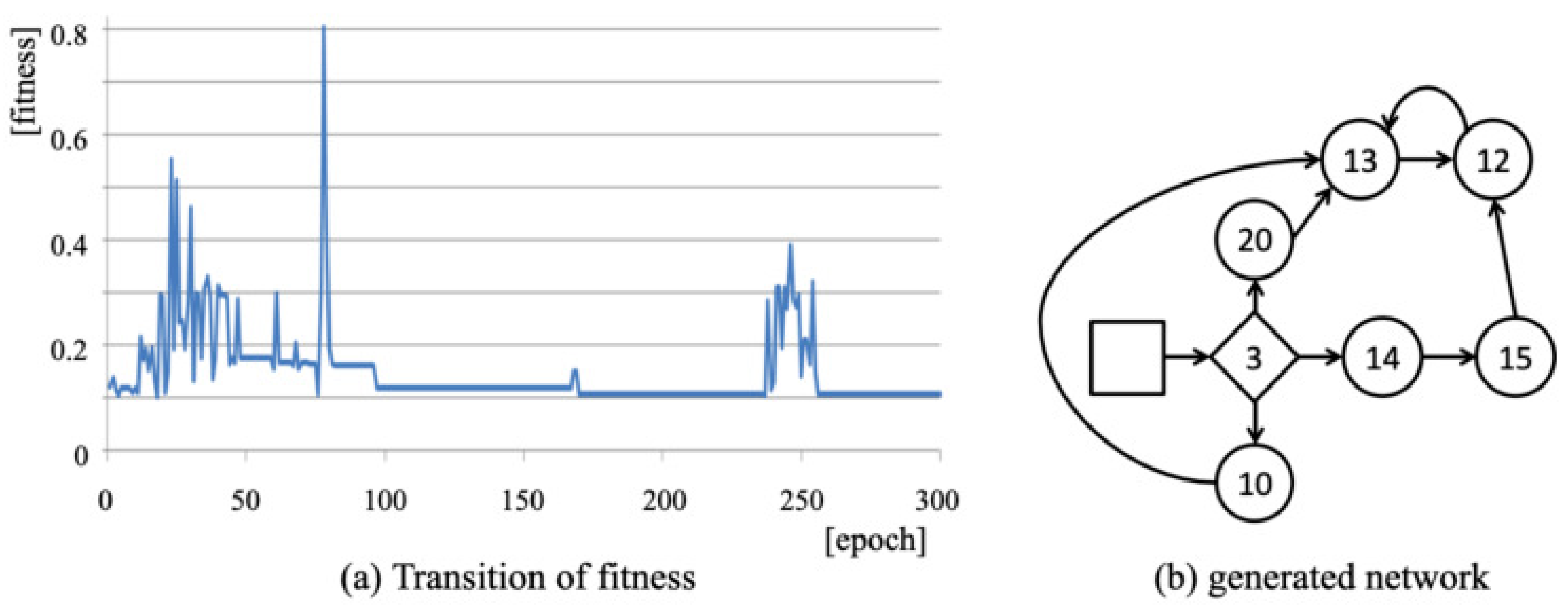
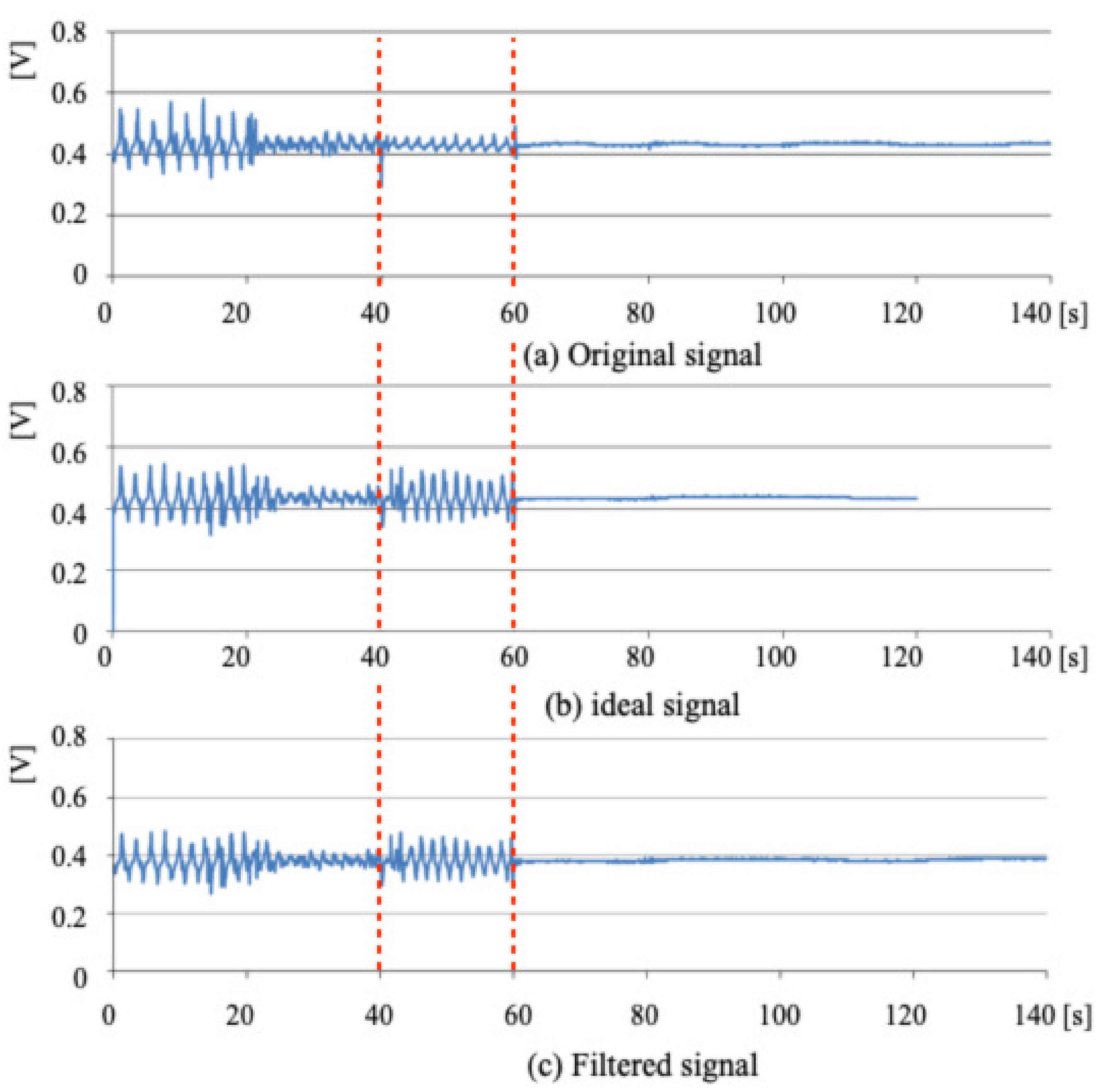
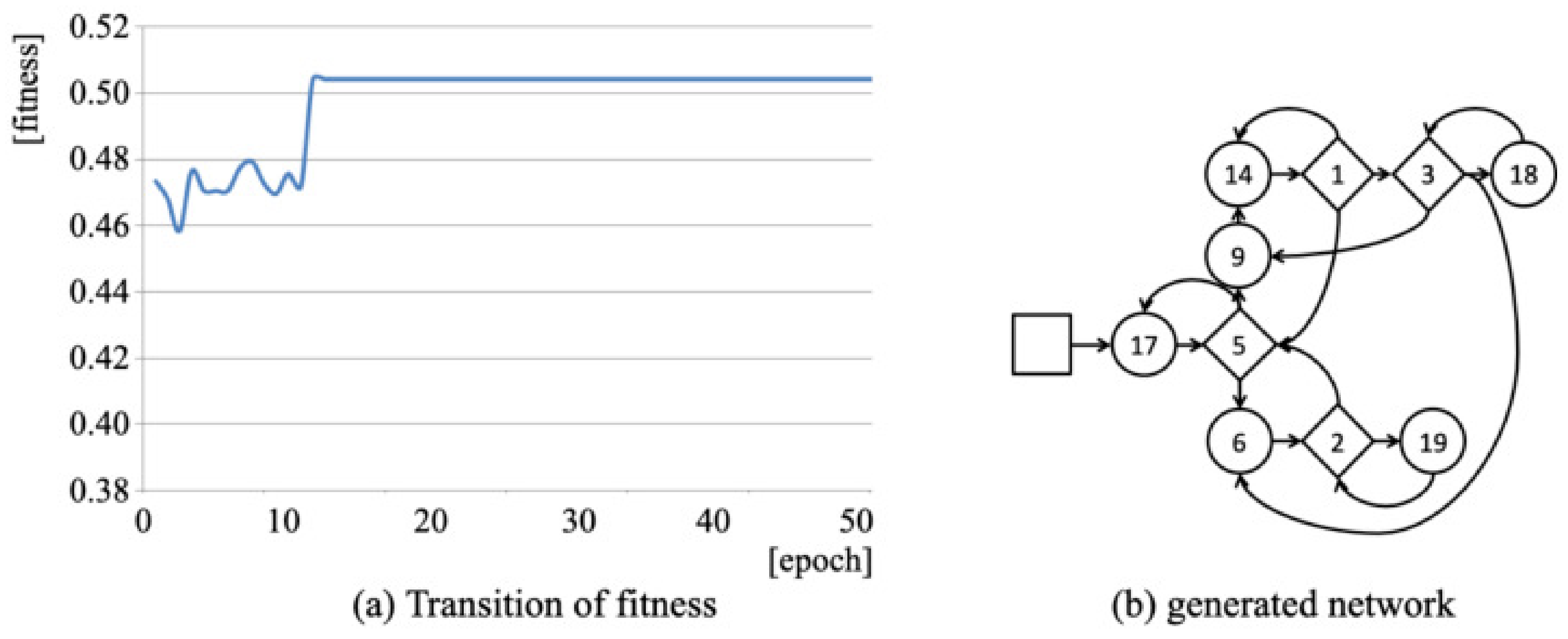
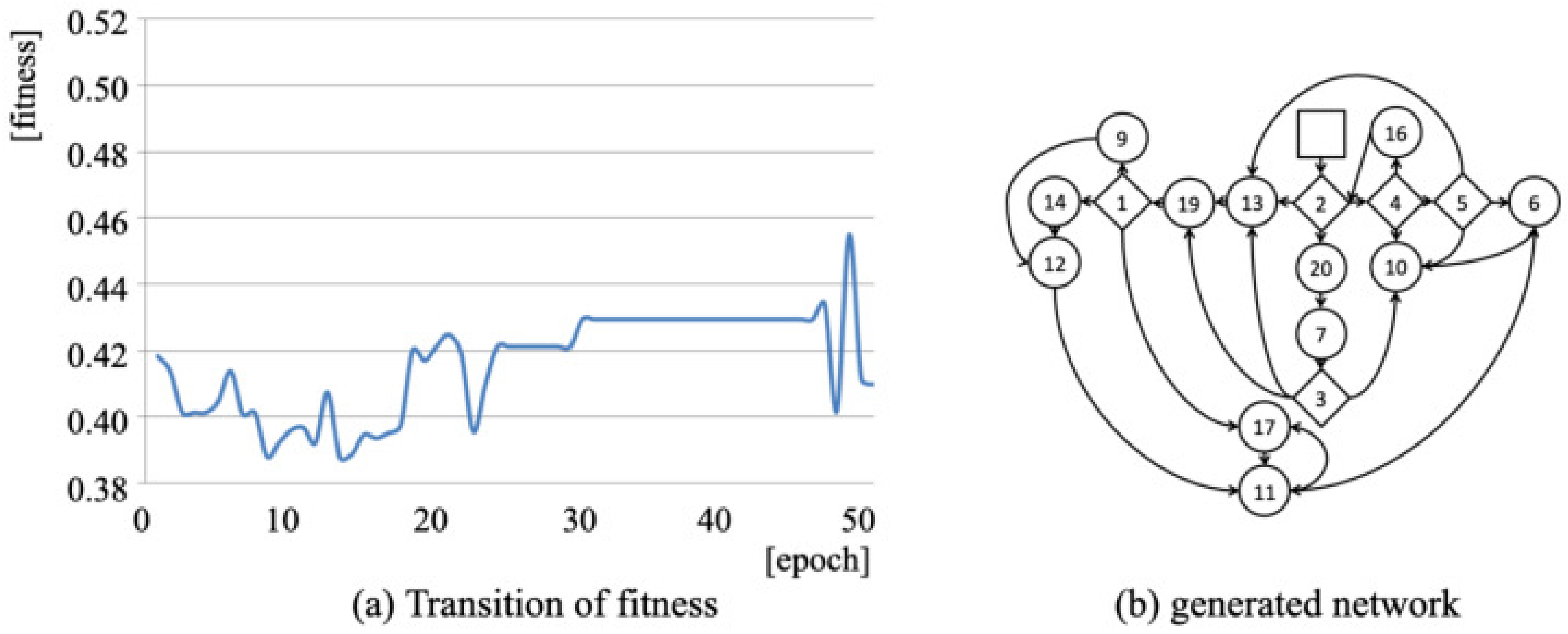
This paper presented a method to generate filters and their optimum sensor signal combination using GNP for improving the recognition accuracy of bed-leaving behavior patterns. We conducted two experiments to demonstrate the basic properties of our method for filtering sensor signals. As the preliminary experiment, we optimized original sensor signals using filters generated using GNP to approximate high-accuracy sensor signals to minimize the fitness-defined difference between them. The experimentally obtained results presented herein reveal that our method provided a filter set that approximates the original signals to ideal signals. For the application experiment, we used the recognition accuracy obtained from CPNs as fitness for evolutional learning. We used three datasets with low accuracy for the evaluation target using leave-one-out cross-validation. Experimentally obtained results reveal that the mean accuracy was improved by 18.88% after applying the generated filters.
Future work shall include an examination of a greater number of target subjects, customizing branch nodes and processing nodes, optimization GNP parameters, verifying the combination with other machine-learning methods, validation of long-term datasets, and the various applications of our method.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}