1. Introduction
Structural reliability is regarded as the ability of the device or structure to complete the required functions under the specified conditions within the prescribed design period [
1,
2,
3,
4,
5]. Since the advent of this concept in engineering and industrial applications, structural reliability analysis in the probabilistic framework has been developed rapidly. Although a series of effective methods, including the first-order second-moment method [
6,
7], second-order second-moment method [
8] and system reliability analysis [
9], have been proposed. However, there are several time-variant uncertain parameters in practical structures such as external dynamic loads, degradation of material properties and changes of geometric characteristics that affect the time-variant reliability of structures [
10]. Accordingly, it is significant importance to conduct to carry out a time-variant reliability analysis for the engineering structures.
Conventional time-variant reliability analyzing methods can be mainly divided into five categories [
11,
12,
13], i.e. the first-passage method, numerical methods, extreme value density methods, surrogate methods and the quasi-static methods.
The time-variant reliability problem mainly originates from the first-passage method proposed by Rice [
14] in the 1940s, which lays the foundation for the development of the subsequent crossing rate method. It should be noted that the calculation of the outcrossing rate is essential in Rice’s method. Studies show that, although the Rice method has remarkable advantages over other methods from the computational point of view, this is accounted for by the hypothesis that the outer crossover is statistically independent. However, this assumption results in the relatively low accuracy of the time-variant reliability approaches. In order to resolve this shortcoming, Andrieu Renaud et al. [
15] transformed the calculation of the outcrossing rate into the reliability problem of a static parallel system and established the pHi2 method. Accordingly, they provided a good scheme to determine the span rate efficiently and analyze the time-variant reliability. On this basis, Sudret [
16] presented the PHI2+ approach to achieve an analytical solution for the crossover rate.
The second scheme is the numerical simulation method. Mori and Ellingwood [
17] and Singh et al. [
18] developed sampling methods and subset simulation methods, respectively [
19,
20,
21]. Moreover, studies show that the Monte Carlo simulation (MCS) method can be used to sample a random process or random variable in a limited state function of a structure and bring these random numbers into a function to compute time-variant reliability. Further investigations show that although the Monte Carlo simulation method has high accuracy, it has a relatively low computational efficiency.
The third method is the extreme value density method, which uses the probability distribution of the response extremum of the time-variant problem to change the time-variant problem into an invariant problem. In this fashion, Chen and Li [
22] utilized an improved probability density evolution method. Furthermore, Hu and Du [
23] transformed the time-variant reliability analysis into a reliability problem and proposed an innovative sampling method for the response extreme value distribution. It should be pointed out that the proposed method does not require time-variant parameters, thereby improving the calculation efficiency.
The fifth method is the surrogate model, which is based on constructing an analytical expression between the input variables and the structural response [
24]. Then, an appropriate interpolation algorithm is applied to obtain the analytical expression that meets the accuracy requirements. Accordingly, Wang and Wang [
25,
26] embedded the efficient global optimization (EGO) method [
27] in an extreme value surrogate model and proposed a nested extreme value response method to identify the extreme values. Moreover, Zhang et al. [
28] proposed a new response approximation model for the time-dependent reliability analysis of uncertain structures under stochastic loads.
Finally, the main objective of the quasi-static method is to change the time-variant reliability issue into a constant reliability issue. In this method, time-variant uncertain parameters are discretized to transform the complex time-variant reliability problem into a problem independent of time-variant parameters. In this regard, Li et al. [
29] and Cazuguel et al. [
30] transformed the time-variant reliability model into a static reliability model through representing the Gaussian process as multiple independent normal distributions. Gong and Frangopol [
31] proposed the NEWREL method based on stochastic discretization method. Jiang et al. [
10,
32] developed the reliability calculation method for discretizing time-variant uncertain parameters (TRPD) and extended it to system reliability. Subsequently, an improved version of TRPD [
33] was proposed in which time-variant reliability analysis was performed only at the component level. This paper focuses on the TPRD approach.
Known by references aforementioned, the majority of investigations in the field of time-variant reliability are confined to conventional structural reliability problems with random variables [
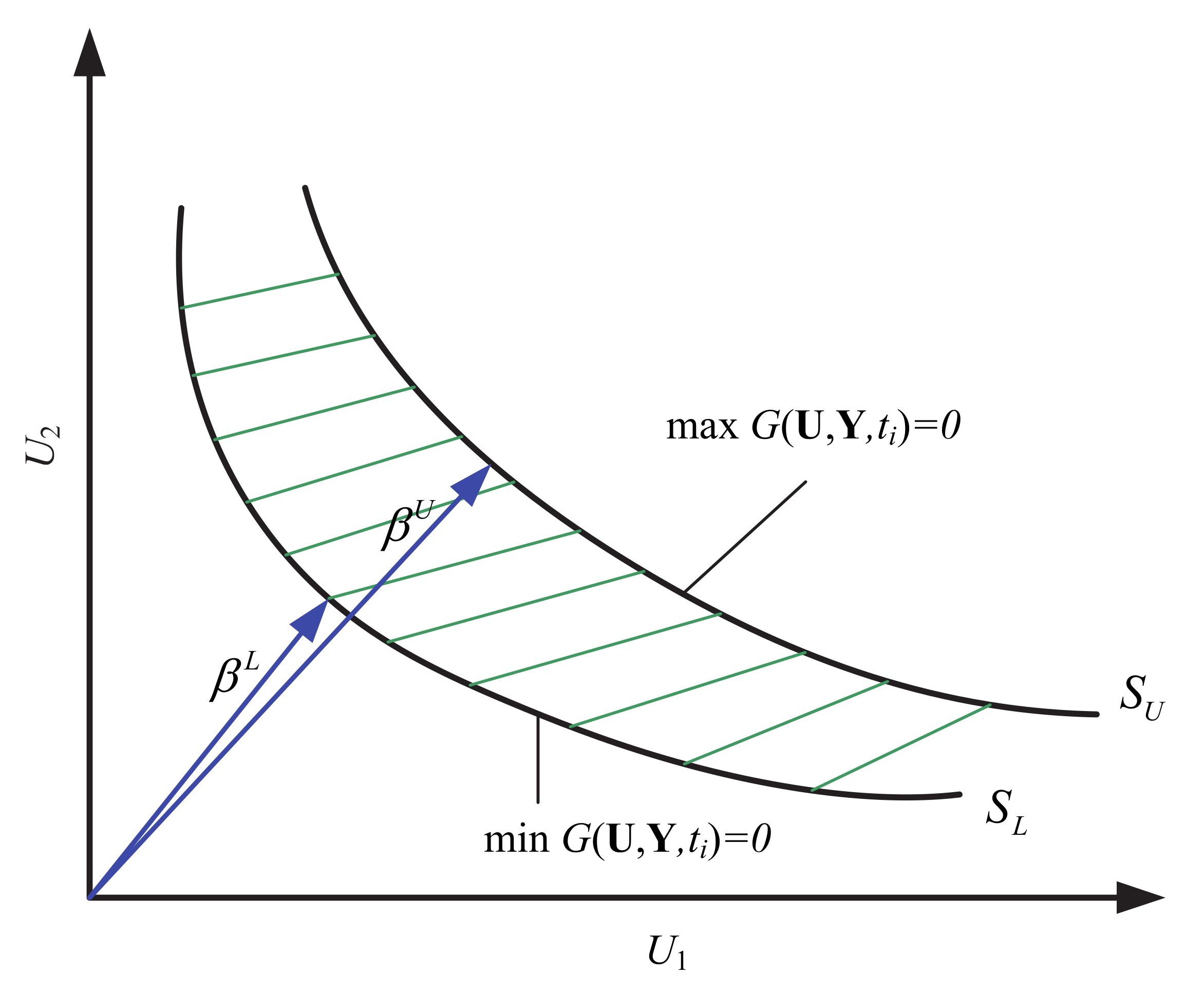
34]. This kind of time-variant reliability analysis requires a large number of experimental samples to construct accurate probability distributions of random variables. However, experimental sample data is limited in many engineering applications. In this case, the boundary of the uncertain variable is easy to determine, and the uncertain variable is suitable to be described by the non-probabilistic interval variable. For reliability analysis problems with interval variables, non-probabilistic methods can be used to measure reliability [
34]. There may be both random and non-probability interval-uncertain variables in structural systems. Therefore, it is necessary to develop effective methods to solve the mixed uncertainty problems [
35,
36]. However, only a few researchers studied time-variant reliability problems of mixed variable structures. Specifically, a multi-layer nested analysis approach has been adopted to solve mixed time-variant reliability problems [
29,
37]; the outer layer is used to discretize the stochastic process in the time-variant function, while the inner layer is nested optimized at each time step. Accordingly, the computational efficiency is extremely low, which adversely affects its practicability in industrial applications. To this end, it is vital to develop efficient algorithms to significantly decrease the computational burden of the time-variant reliability method with mixed variables.
In the present study, it is intended to presented a novel approach to analyze the structural time-variant reliability with mixed variables. To this end, the existing time-variant reliability theory is combined with the interval uncertainty analysis. The rest of this paper is organized as follows: the structural time-variant reliability model with random variables is introduced in
Section 2. Then, the structural time-variant reliability model with mixed variable and traditional solution method are discussed in
Section 3. In
Section 4, a new method is proposed to analyze the structural time-variant reliability. For evaluating the effectiveness of the presented approach, it is applied to several numerical and engineering case studies and then the obtained results are presented in
Section 5. Finally,
Section 6 summarizes the main results and conclusions of this study.
2. Structural Time-Variant Reliability Model with Random Variables
Generally, time-variant reliability models are an account of the generalized force model and contain one random variable. Let
g be the limit state function composed of the general random process of structural resistance
R(
t) and the stochastic process of structural load effect
S(
t). This function, which can be linear or nonlinear, can be given as:
where
t is the time variable. Generally, the stochastic process
S(
t) of structural load effect contains the permanent load
A (usually
n-dimensional random vector) and the stochastic process
Q(
t) of the variable load. Accordingly, Equation (1) can be rewritten as follows:
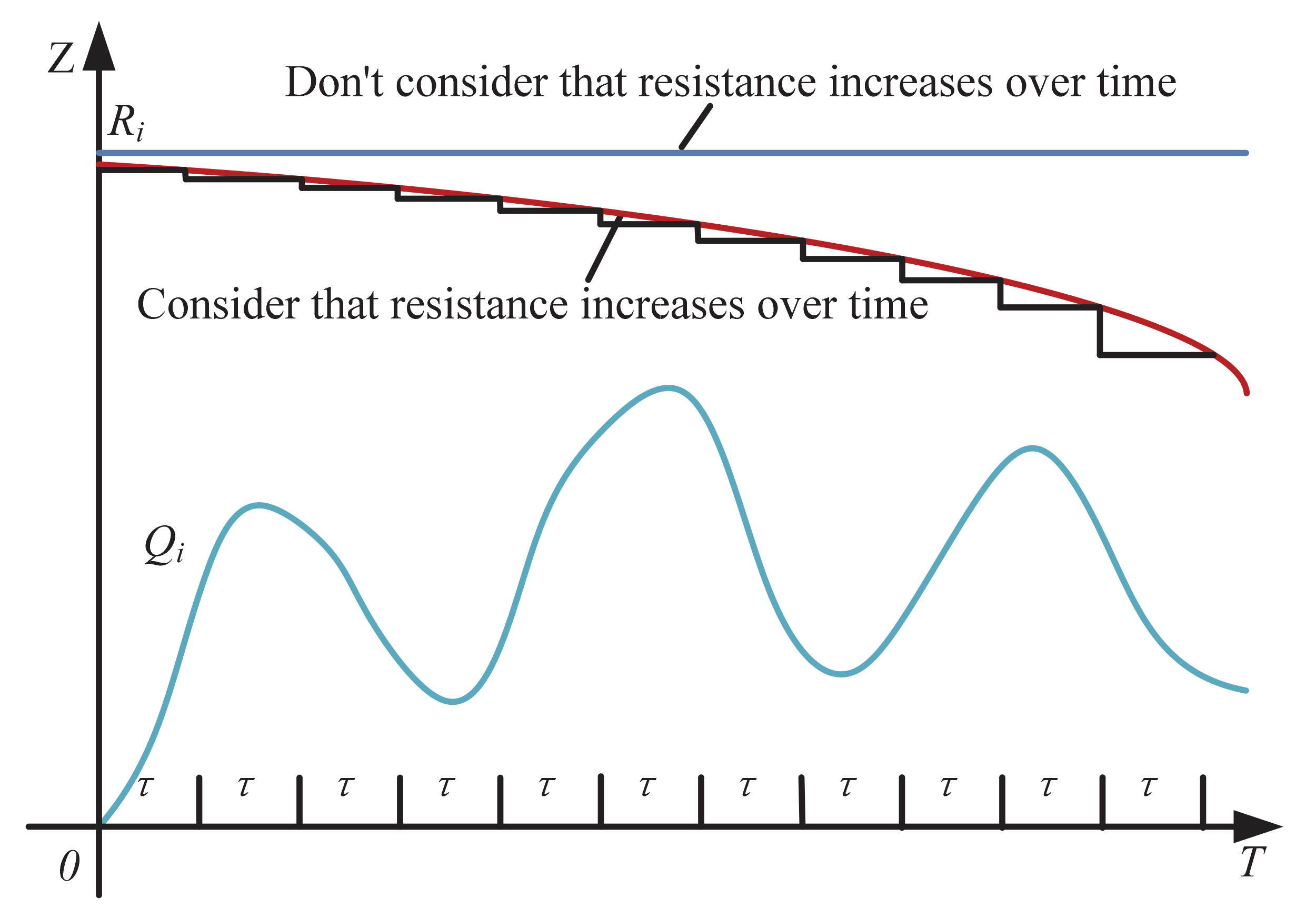
In practical engineering problems, the common degradation forms of structural resistance stochastic process
R(
t) include exponential and logarithmic degradation forms, which can be mathematically expressed through Equations (3) and (4), respectively.
where
and
denote the initial resistance and the attenuation coefficient, respectively. Based on the definition of reliability, reliability
and failure probability
of the structure within the design service period
T can be expressed in the form below:
6. Conclusions
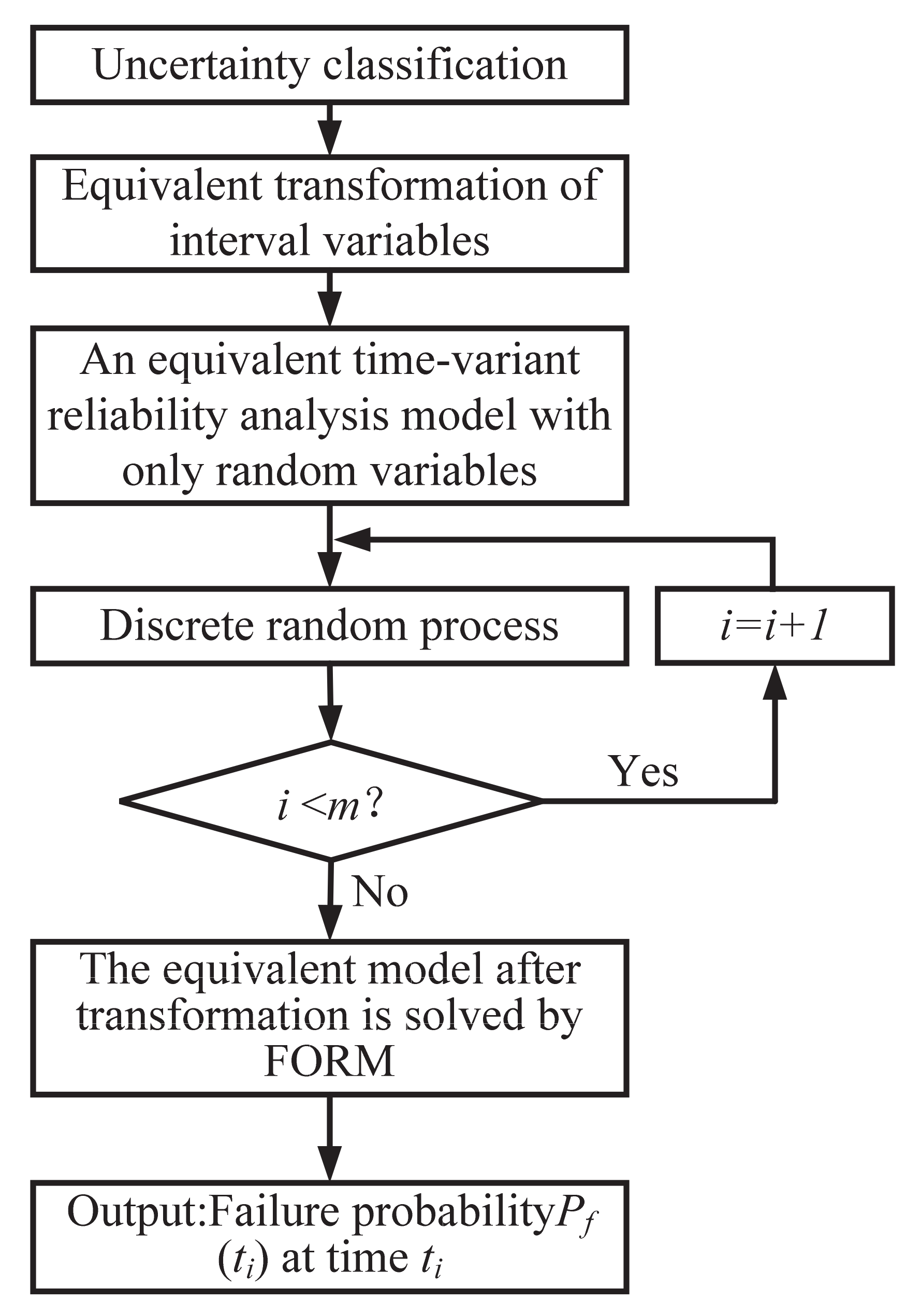
In the present article, a time-variant reliability analysis method is proposed for mixed-variable structures. The time-variant reliability problem of structures with mixed variables is transformed into a time-variant reliability problem of structures with random variables. Then the stochastic process is discretized and the static limit state functions of different periods are obtained. After the original problem is changed into an invariant reliability problem, the first-order second-moment method is applied to solve the problem. Finally, the reliability index under the design base period is obtained.
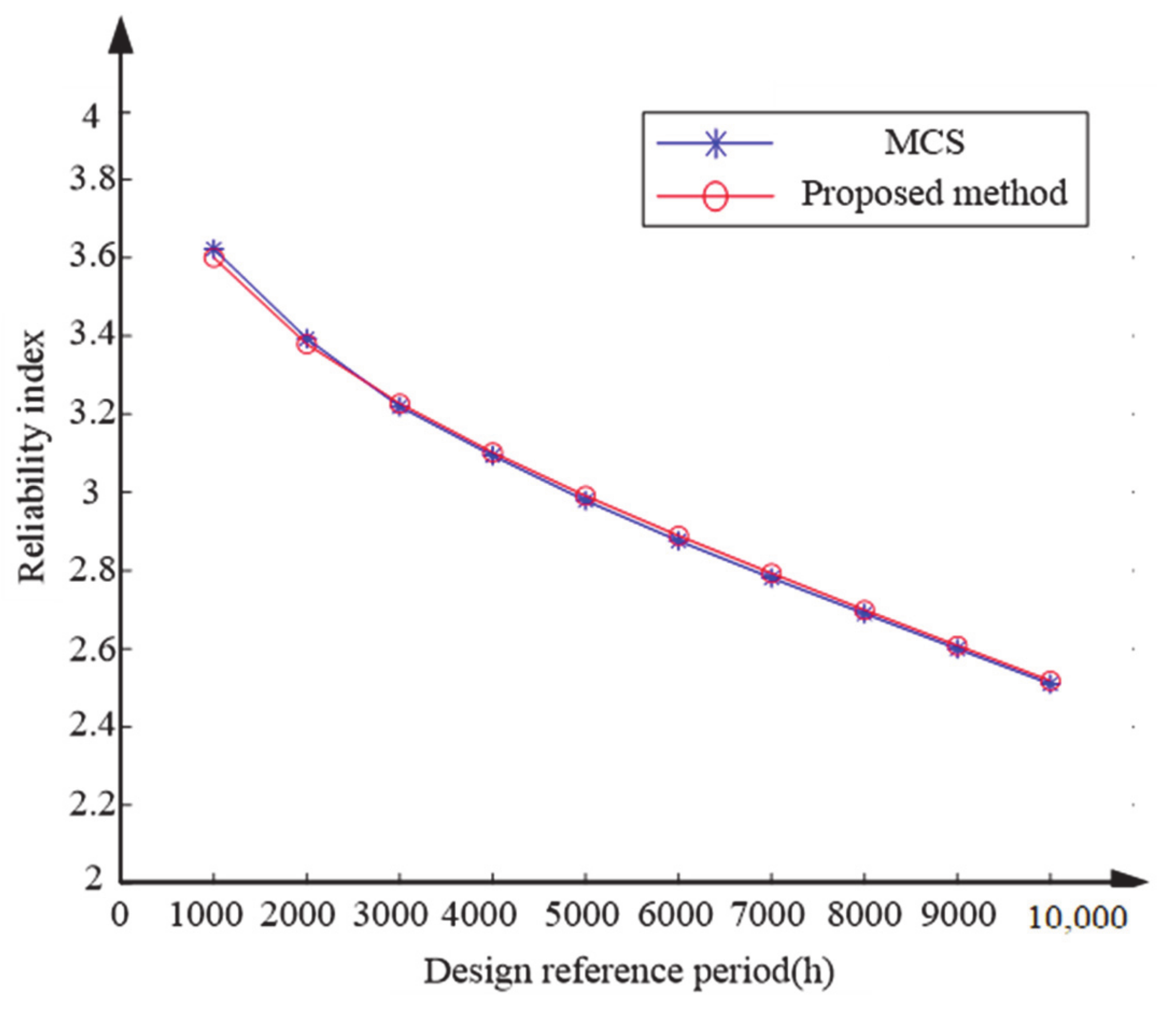
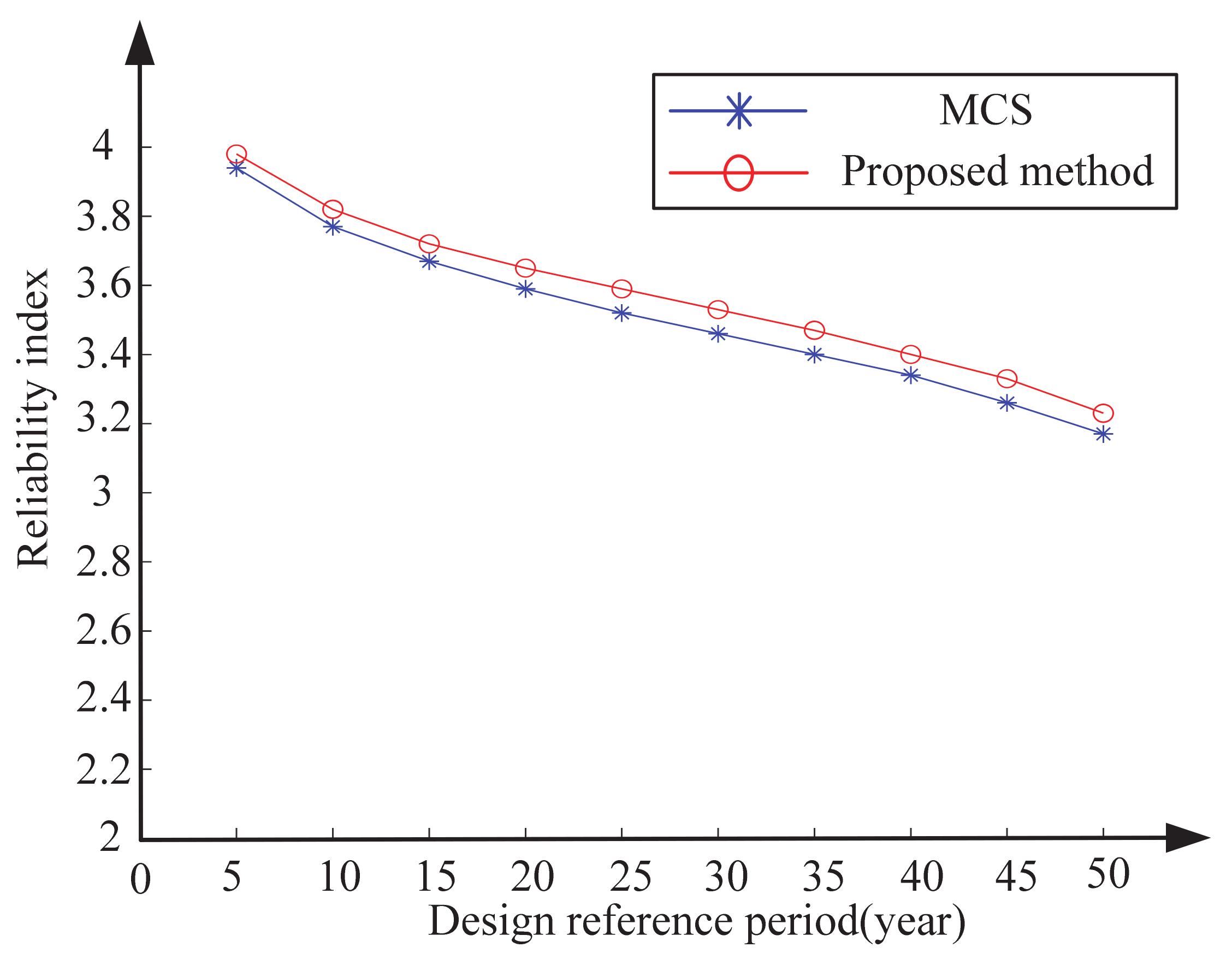
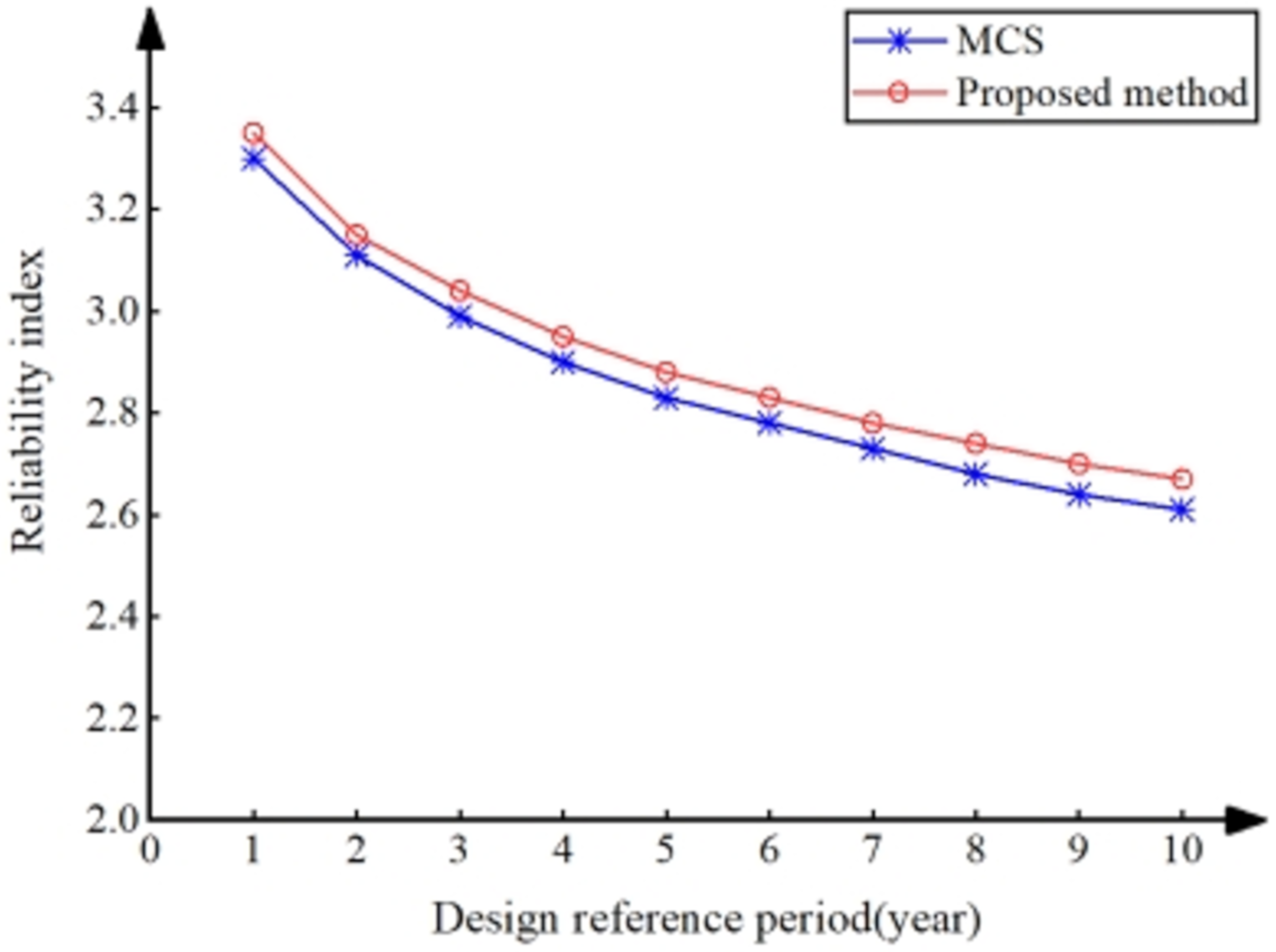
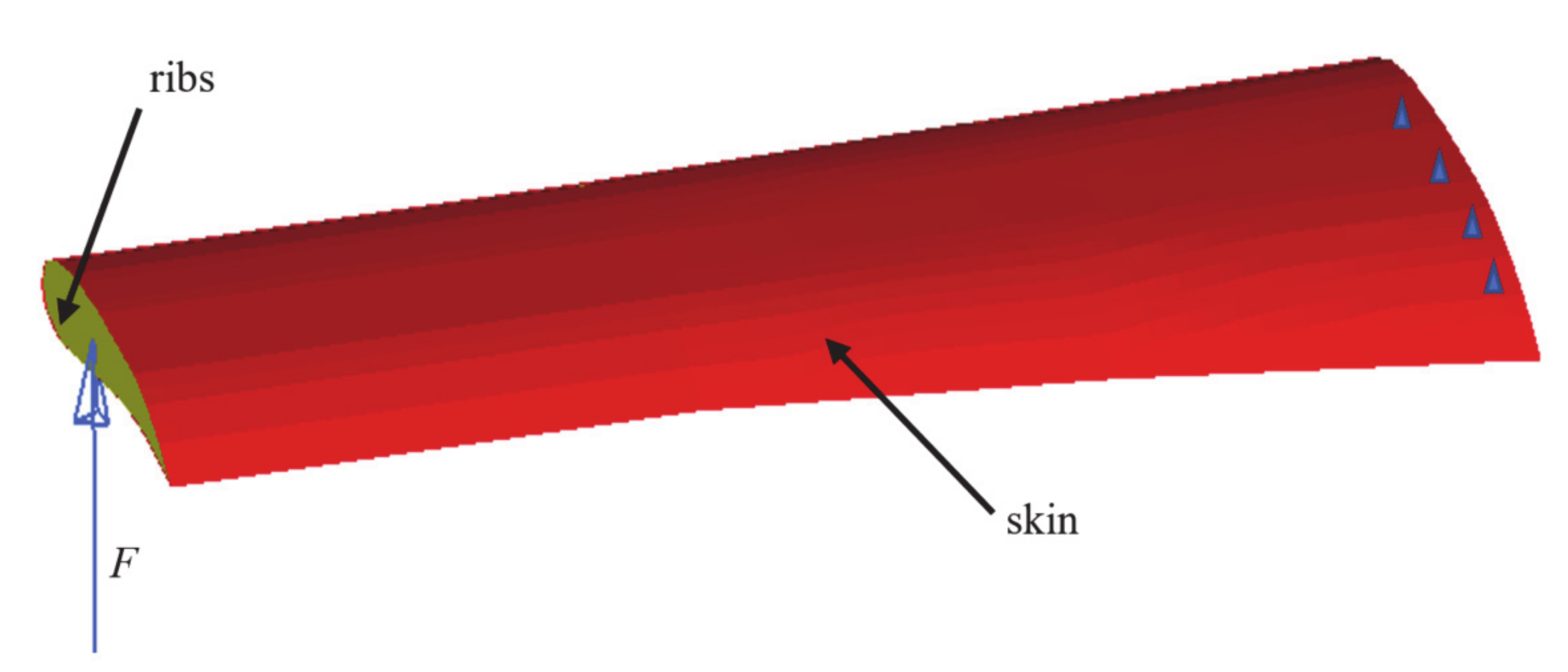
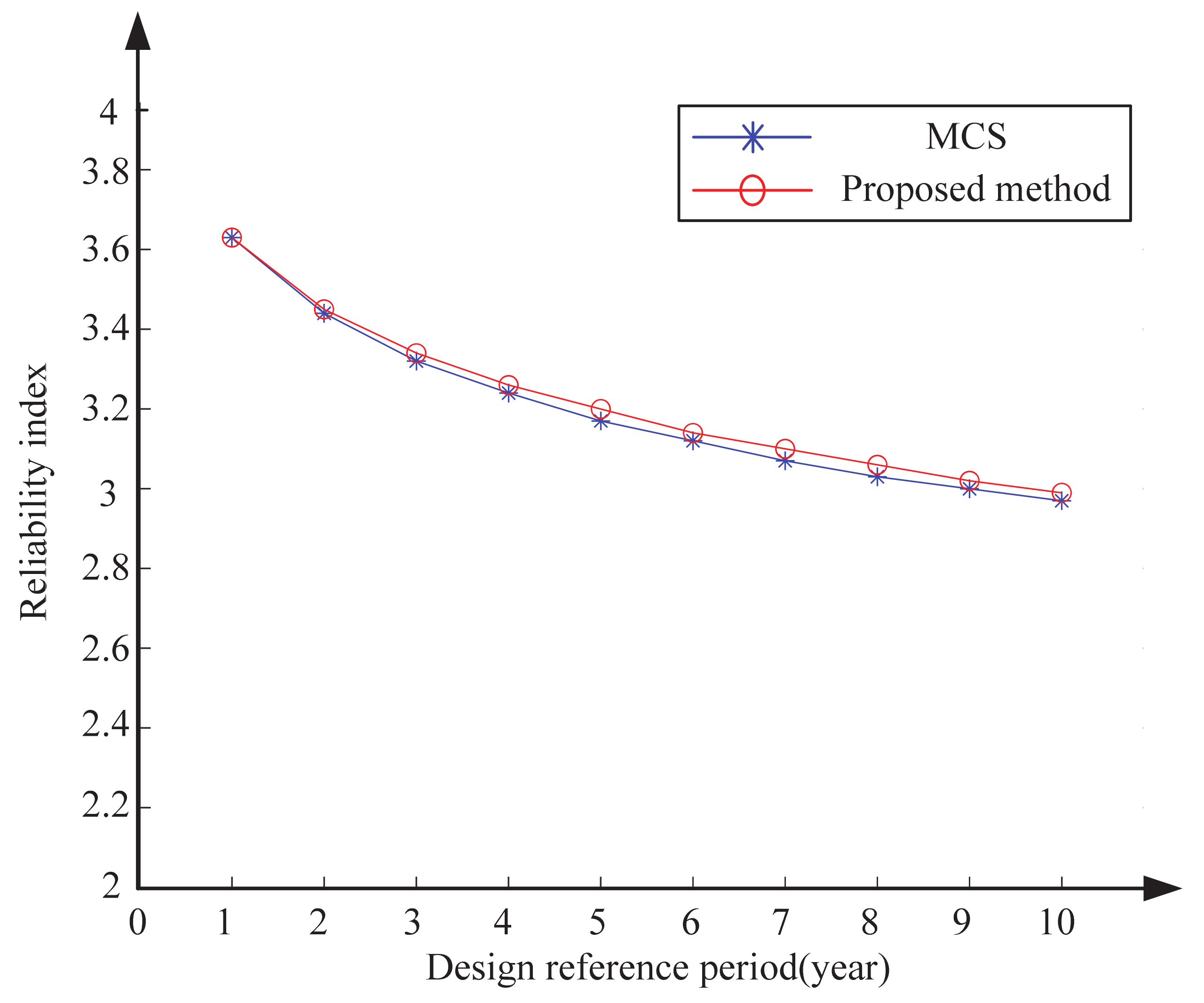
In order to evaluate the performance of the presented approach, it is applied to three numerical and one engineering case studies. Obtained results show that in the studied cases, the performance of the presented approach is very close to that of the Monte Carlo method. Moreover, it is found that the proposed algorithm avoids multi-layer nesting optimization and greatly improves computational efficiency.
The present method can be extended to time-variant reliability analysis problems with convex set variables and probability variables, and to multidisciplinary reliability analysis problems. When the range of interval parameters are big, the computational expenses of the proposed method cannot be justified. In order to resolve this shortcoming, improving the efficiency of time-variant hybrid reliability analyses will be discussed in the near future.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}